
An Intelligent and Autonomous Sight Distance Evaluation Framework for Sustainable Transportation

 ,
,  , and
, and
Abstract
:1. Introduction
- We collected the data viz. unmanned level crossing location, pavement condition, traffic volume, road width, visibility, speed of road vehicles, perception and reaction time, approach road gradient, distance of speed breaker distance from crossing, friction, number of lanes, environment, construction, width of rail gauge, length of the road vehicle, and accident statistics from unmanned railway level crossings.
- We determined a safe stopping sight distance model for unmanned railway level crossings in the study area using supervised machine learning regression algorithms in the Python programming language.
- A sight distance equation was developed from a road to rail track model for unmanned railway level crossings, and prediction accuracy analysis of different machine learning algorithms was performed for the development of the SSD model.
- Analysis of relevant features for judging the major contributing parameter for safe stopping sight distance was carried out.
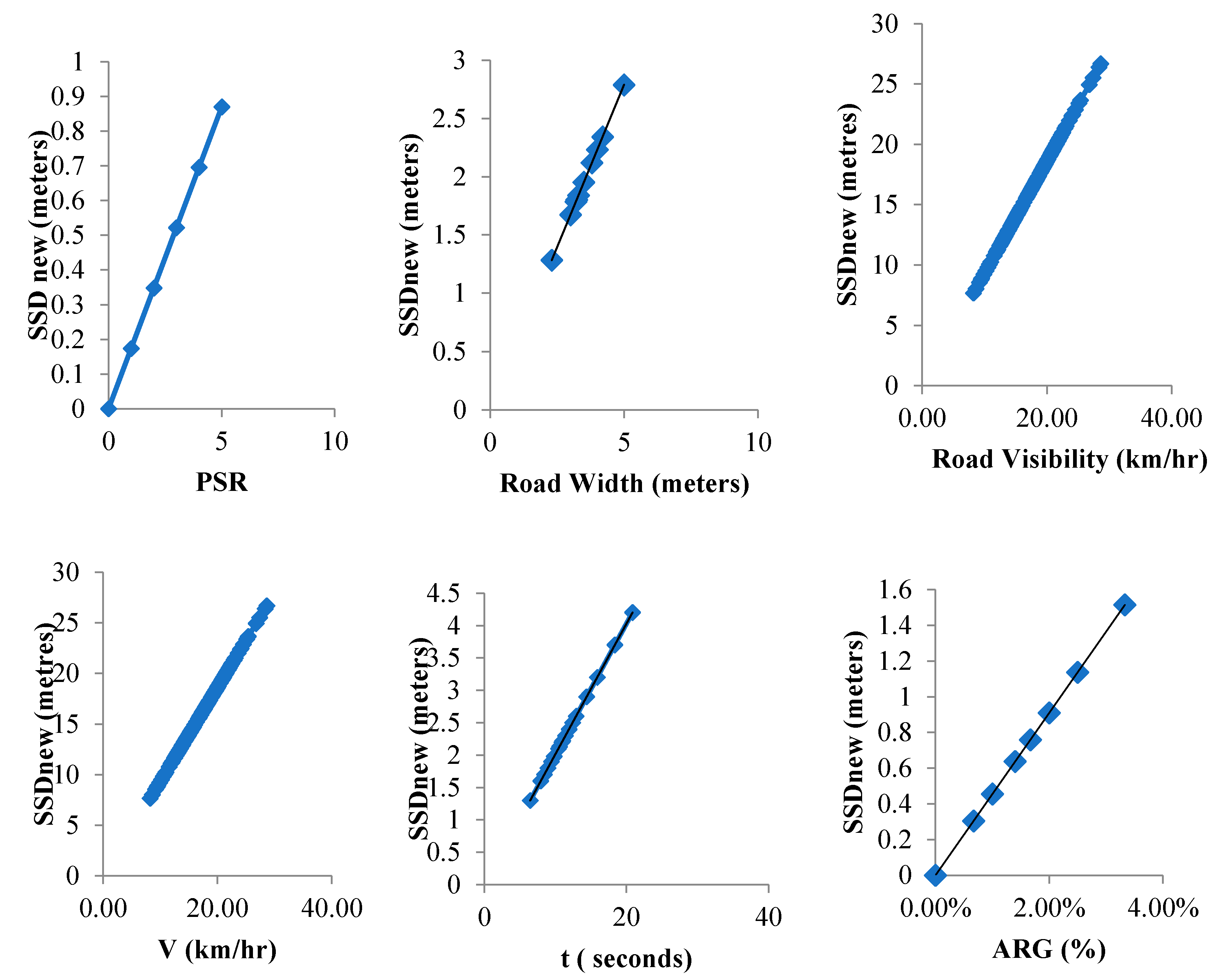
- We also performed the sensitivity analysis of the SSD model for parameters such as road width, visibility, speed of road vehicles, perception and reaction time, approach road gradient, and speed breaker distance from crossing to perform accident prediction analysis of the new SSD model.
2. Related Work
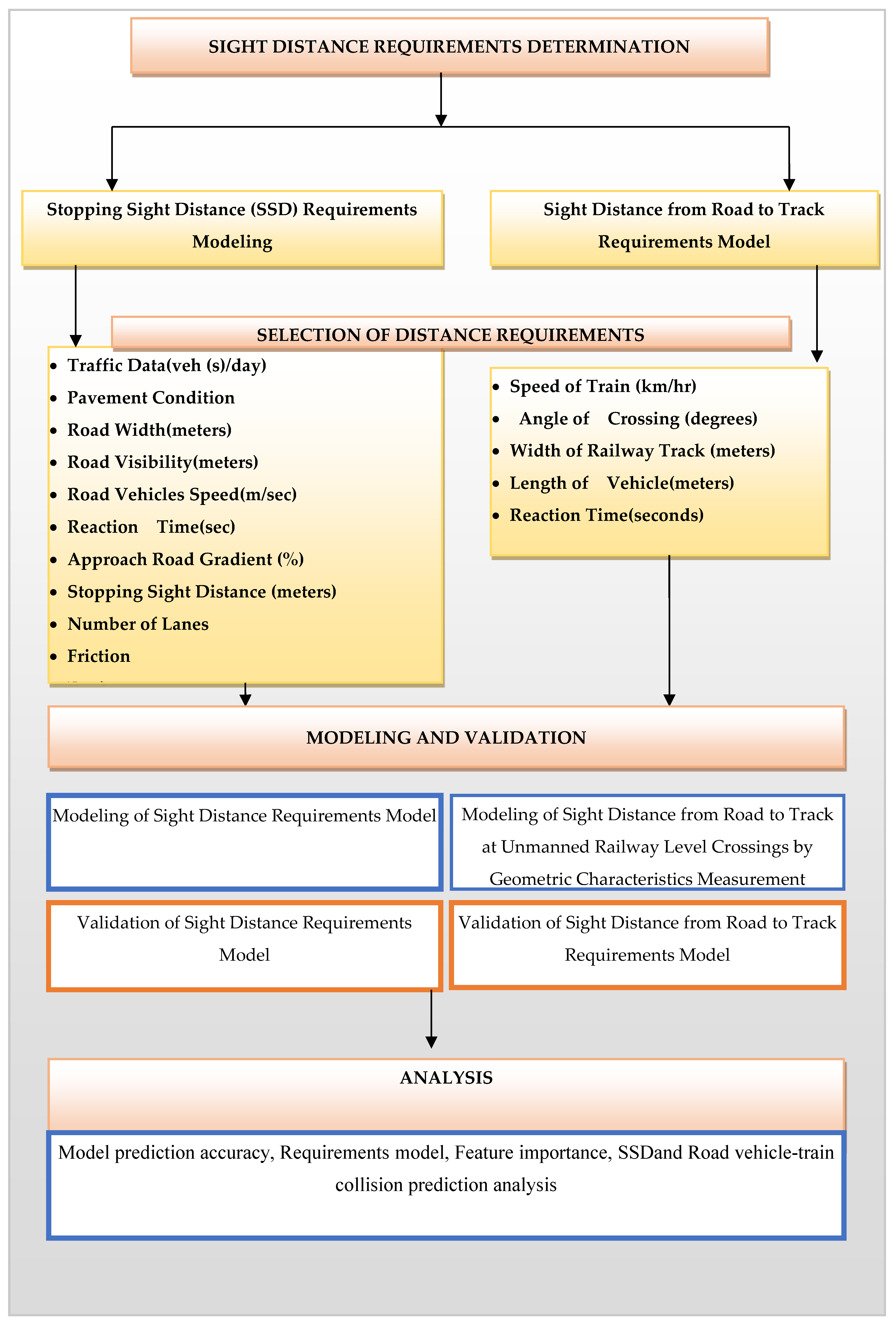
3. Materials and Methods
3.1. Data Collection
3.2. Data Preprocessing
3.3. Data Splitting
3.4. Modeling
3.4.1. Safe Stopping Sight Distance Model
3.4.2. Sight Distance from Road to Track Modeling
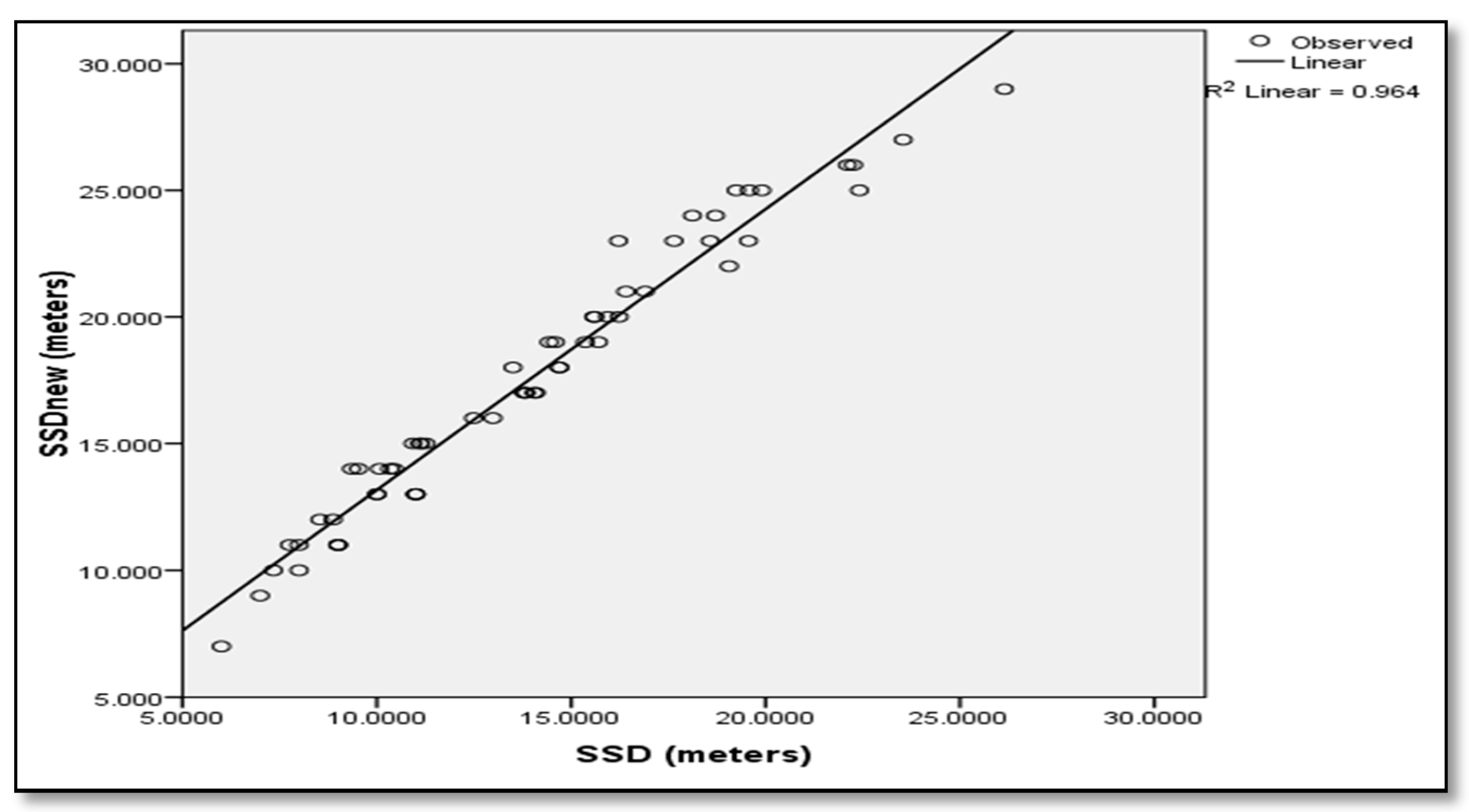
3.5. Model Validation
Evaluation Metrics
- Coefficient of Determination (R2)
- p-value Statistics
- Mean Absolute Error (MAE)
- Mean Squared Error (MSE)
- Root Mean Squared Error (RMSE)
- Mean Averaged Percentage Error (MAPE)
4. Results and Discussion
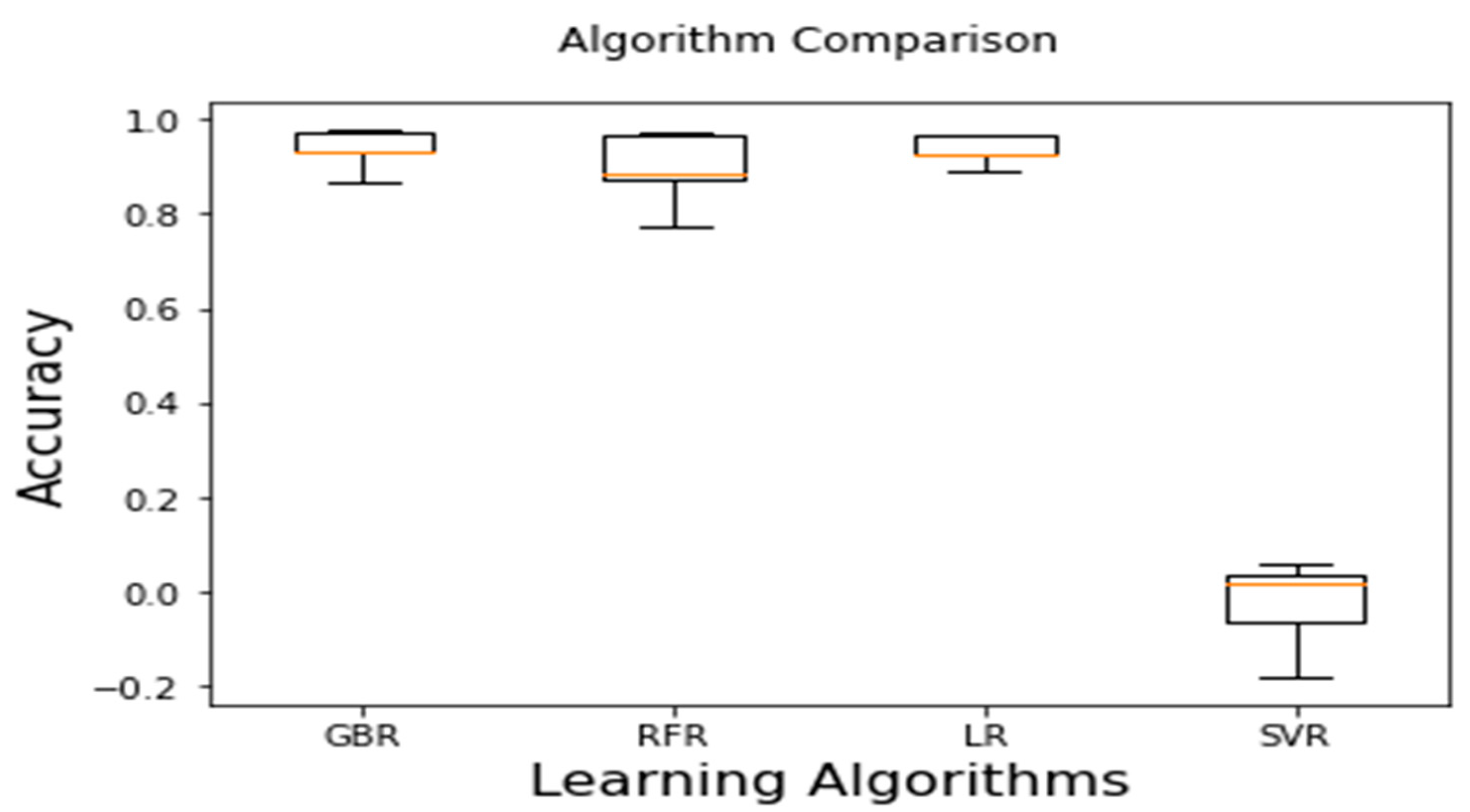
4.1. Model Prediction Accuracy
4.2. Feature Importance
4.3. Sesnitivity Analysis
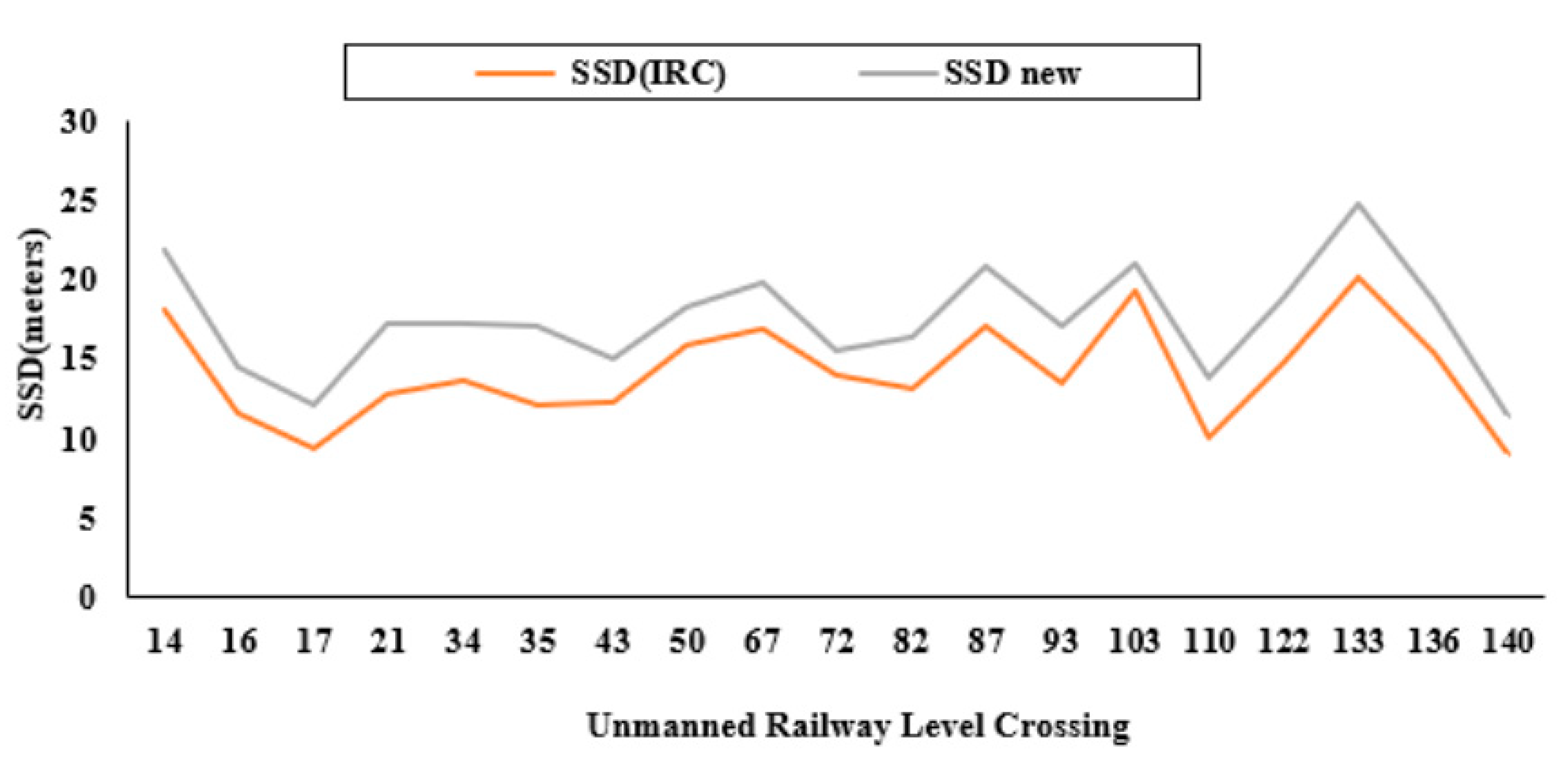
4.4. SSD Analysis
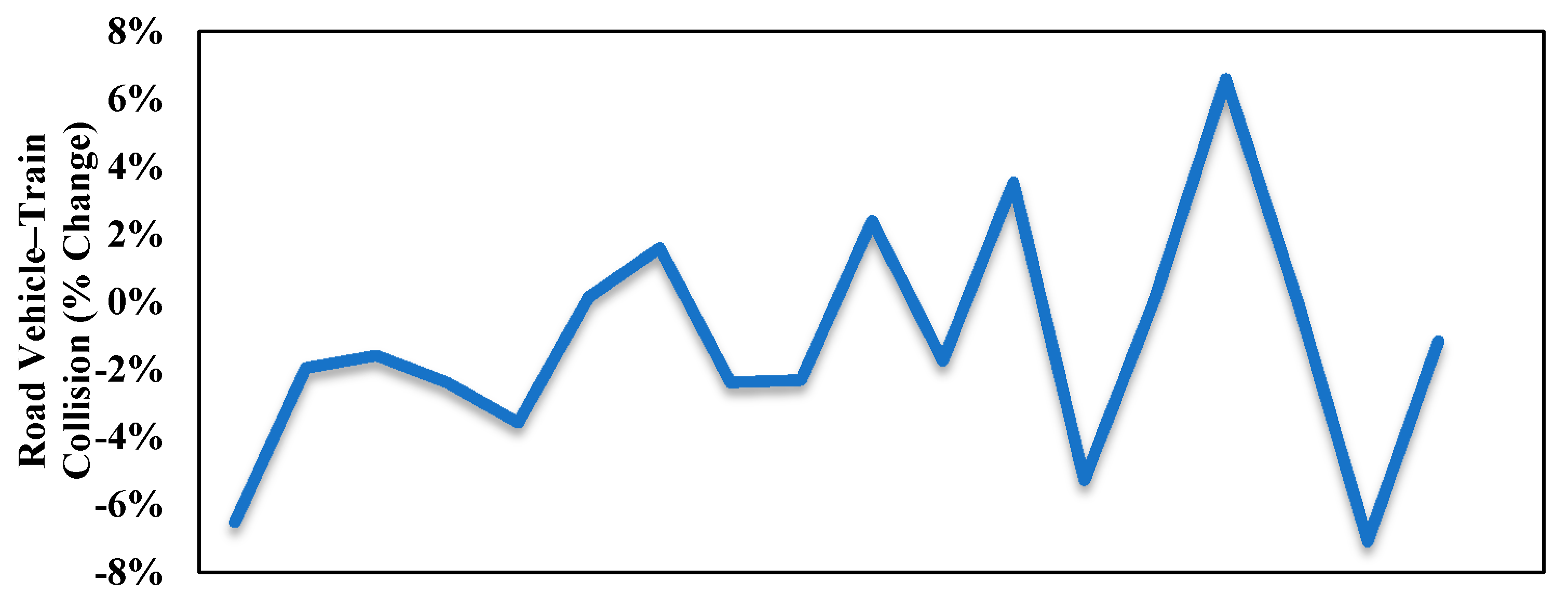
4.5. Road Vehicle–Train Collision Prediction Analysis
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jolfaei, A.; Kant, K. Privacy and Security of Connected Vehicles in Intelligent Transportation System. In Proceedings of the 49th Annual IEEE/IFIP International Conference on Dependable Systems and Networks—Supplemental Volume (DSN-S), Portland, OR, USA, 24–27 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 9–10. [Google Scholar]
- Jolfaei, A.; Kant, K. A lightweight integrity protection scheme for low latency smart grid applications. Comput. Secur. 2019, 86, 471–483. [Google Scholar] [CrossRef] [Green Version]
- Ai, B.; Molisch, A.F.; Rupp, M.; Zhong, Z.D. 5G key technologies for smart railways. Proc. IEEE 2020, 108, 856–893. [Google Scholar] [CrossRef]
- Stuart, J.J.; Mustard, D.; Johston, R.; Singh, M. Around 15,000 people killed every year in rail accidents. Times of India, 21 August 2013; 1–18. [Google Scholar]
- Chen, E.; Yan, Y.Z.; Wang, C.; Du, C. Investigating impacts of illegal crossings on vehicle operations at unmarked midblock locations. J. Transp. Saf. Secur. 2020, 1–20. [Google Scholar] [CrossRef]
- Menon, V.G.; Jacob, S.; Joseph, S.; Sehdev, P.; Khosravi, M.R.; Al-Turjman, F. An IoT-enabled intelligent automobile system for smart cities. Internet Things 2020, 100213. [Google Scholar] [CrossRef]
- Hassan, Y.; Easa, S.M. Modeling of required preview sight distance. J. Transp. Eng. 2000, 126, 13–20. [Google Scholar] [CrossRef]
- Fu, T.; Miranda-Moreno, L.; Saunier, N. A novel framework to evaluate pedestrian safety at non-signalized locations. Accid. Anal. Prev. 2018, 111, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Fu, T.; Hu, W.; Miranda-Moreno, L.; Saunier, N. Investigating secondary pedestrian-vehicle interactions at non-signalized intersections using vision-based trajectory data. Transp. Res. Part C Emerg. Technol. 2019, 105, 222–240. [Google Scholar] [CrossRef]
- Al-Kaisy, A.; Miyake, G.T.; Staszcuk, J.; Scharf, D. Motorists’ voluntary yielding of right of way at uncontrolled midblock crosswalks with rectangular rapid flashing beacons. J. Transp. Saf. Secur. 2018, 10, 303–317. [Google Scholar] [CrossRef] [Green Version]
- Singhal, V.; Jain, S.S.; Anand, D.; Singh, A.; Verma, S.; Rodrigues, J.J.; Jhanjhi, N.Z.; Ghosh, U.; Jo, O.; Iwendi, C. Artificial intelligence enabled road vehicle-train collision risk assessment framework for unmanned railway level crossings. IEEE Access 2020, 8, 113790–113806. [Google Scholar] [CrossRef]
- Singhal, V.; Jain, S.S.; Parida, M. Train sound level detection system at unmanned railway level crossings. Eur. Transp. 2018, 68, 1–18. [Google Scholar]
- Singhal, V.; Jain, S.S. Road driver behaviour evaluation at unmanned railway level crossings. Eur. Transp. 2017, 65, 1–25. [Google Scholar]
- Mittal, P.; Singhal, V.; Jain, S.S. ICT enabled vehicular safe distance modeling at indian unmanned railway level crossings. SSRN Electron. J. 2019. [Google Scholar] [CrossRef]
- Mumtaz, S.; Jornet, J.M.; Aulin, J.; Gerstacker, W.H.; Dong, X.; Ai, B. Terahertz Communication for Vehicular Networks. IEEE Trans. Veh. Technol. 2017, 66, 5617–5625. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Li, P.; Zhao, W.; Cai, W.; Yu, S.; Leung, V.C.M. A survey on security threats and defensive techniques of machine learning: A data driven view. IEEE Access 2018, 6, 12103–12117. [Google Scholar] [CrossRef]
- Schoppert, W.; Hoyt, D.W. Factors Influencing Safety at Highway-Railway Grade Crossings; Highway Research Board: Washington, DC, USA; National Research Council: Washington, DC, USA; Transportation Research Board: Washington, DC, USA, 1967; pp. 1–113. [Google Scholar]
- Wigglesworth, C. The effects of local knowledge and sight restrictions on driver behaviour at open railway crossings. J. Saf. Res. 1978, 10, 100–107. [Google Scholar]
- IRC-73-1980. Geometric Design Standards for Rural Non-Urban Highways; The Indian Roads Congress: New Delhi, India, 1980. [Google Scholar]
- IRC-39-1986. Standards for Road-Raillevelcrossings; The Indian Roads Congress: New Delhi, India, 1986. [Google Scholar]
- King, T.C. The Effects of Lateral Sight Distance at Railway Crossing on Driving Speed and Visual Search; Unpublished Manuscript; Department of Psycholology, Queen’s University: Kingston, ON, Canada, 1989. [Google Scholar]
- Ward, N.J.; Wilde, G.J.S. Driver approach behaviour at an unprotected railway crossing before and after enhancement of lateral sight distances: An experimental investigation of a risk perception and behavioural compensation hypothesis. Saf. Sci. 1996, 22, 63–75. [Google Scholar] [CrossRef]
- Johtaja, R.O.; Nummelin, M. ‘Ratatekniset Määräykset ja Ohjeet’, Technical Guidelines for Finnish Railways, Part 9 Level Crossings; Finnish Transport Infrastructure Agency: Helsinki, Finland, 2002; pp. 1–52. [Google Scholar]
- Gou, M.; Bellavigna-Ladoux, O.; Dumont-Mackay, E. Impact of Heavy Vehicles on Crossing Safety Development of an Adapted Design Tool; Transport Canada Publication, TP 14172E; Transportation Development Centre: Montreal, QC, Canada, 2003. [Google Scholar]
- Nizam, A.; MacDonald, D. Highway-Rail Grade Crossing 101; Washington State Department: Seattle, WA, USA, 2005; pp. 1–104. [Google Scholar]
- Mornell, O. Plankorsningar Vägteknisk Utformning. 2008; volume 1. Available online: https://www.trafikverket.se/contentassets/5a8c103a24b94ba8874d4cb784a3d34a/bvs1586_30-plankorsningar_vagteknisk_utformning.pdf (accessed on 23 July 2021).
- New Zealand Transport Agency. Available online: https://www.nzta.govt.nz/. (accessed on 10 July 2008).
- Kallberg, V.-P. Determination of Sight Distance Requirements for Finnish Level Crossings. Open Transp. J. 2011, 5, 71–79. [Google Scholar] [CrossRef]
- Finnish Rail Administration. Available online: https://www.solita.fi/en/customers/more-efficient-and-safe-finnish-rail-transport/. (accessed on 2 January 2007).
- Sever, D. New approach to determining visibility length on passive protected level railroad crossings. Promet Traffic 2012, 24, 479–486. [Google Scholar] [CrossRef]
- Kumar, A.; Panday, M.N. Study of Safety Awareness at Railway Level Crossing. Int. J. Eng. Res. Technol. 2013, 2, 1097–1105. [Google Scholar]
- Moayedfar, R.; Moghadam, M.S.; Haghighatpour, P.J.I. Calculation of Sight Triangle Dimensions and -Unobstructed Area at Railway Level Crossings in Iran. J. Civ. Environ. Eng. 2014, 4, 60. [Google Scholar]
- Rudin-Brown, C.; Stuart, J.J.; Mustard, D.; French-St.George, M.; Johston, R. Extending the approach zone at passive level crossings: Improving train detection and driver decision-making. In Proceedings of the Global Level Crossing Symposium; Urbana, IL, USA, 3–8 August 2014, Transport Safety Board of Canada: Gatineau, QC, Canada, 2014; pp. 1–27. [Google Scholar]
- Zhou, Z.; Xiong, F.; Yu, H.; Xu, C.; Mumtaz, S.; Rodriguez, J.; Tariq, M. Trajectory-Based Reliable Content Distribution in D2D-Based Cooperative Vehicular Networks: A Coalition Formation Approach. In Proceedings of the IEEE International Conference on Communications, Kansas City, KS, USA, 20–24 May 2018; pp. 1–12. [Google Scholar]
- Malik, K.R.; Ahmad, M.; Khalid, S.; Ahmad, H.; Al-Turjman, F.; Jabbar, S. Image and command hybrid model for vehicle control using Internet of Vehicles. Trans. Emerg. Telecommun. Technol. 2020, 31, 1–13. [Google Scholar] [CrossRef]
- Zegeer, C.V.; Stewart, J.R.; Huang, H.H.; Lagerwey, P.A.; Feaganes, J.; Campbell, B. Safety Effects of Marked Versus Unmarked Crosswalks at Uncontrolled Locations. Transp. Res. Rec. 2005, 1773, 56–68. [Google Scholar] [CrossRef] [Green Version]
- Regression Algorithms: Which Machine Learning Metrics? Available online: https://www.mydatamodels.com/learn/guide/a-path-to-discover-ai/regression-algorithms-which-machine-learning-metrics/ (accessed on 10 June 2021).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Correlation |
|---|---|
| Speed of Road Vehicles | 0.785059 |
| Perception and Reaction Time | 0.574636 |
| Road Visibility | 0.066366 |
| Distance of Speed Breaker from Crossing | −0.019334 |
| Pavement Condition Rating | −0.081655 |
| Average Daily Traffic | −0.131515 |
| Approach Road Gradient | −0.196355 |
| Road Width | −0.281600 |
| S. No. | Model | Coeff. | Standard Error (S.E.) | t-Statistics | p-Value | Significant/ Not Significant |
|---|---|---|---|---|---|---|
| 1. | PSR | 0.17 | 0.077 | 2.269 | 0.02 | Significant |
| 2. | ADT | 0.00 | 0.000 | 0.486 | 0.63 | Not Significant |
| 3. | Road Width | −0.56 | 0.183 | −3.044 | 0.00 | Significant |
| 4. | Road Visibility | −0.009 | 0.002 | −4.536 | 0.0 | Significant |
| 5. | V | 0.931 | 0.031 | 30.295 | 0.0 | Significant |
| 6. | T | 4.967 | 0.334 | 14.881 | 0.0 | Significant |
| 7. | ARG | −45.46 | 11.71 | −3.883 | 0.0 | Significant |
| 8. | SBDC | −0.026 | 0.015 | −1.706 | 0.09 | Not Significant |
| 9. | NL | −2.995 | 1.757 | −1.707 | 0.09 | Not Significant |
| 10. | F | - | - | - | - | Not Significant |
| 11. | Environment | - | - | - | - | Not Significant |
| 12. | Construction | - | - | - | - | Not Significant |
| Unmanned Level Crossing Category (i) | ARG (Observed) | Ti (in Seconds) | Road Width | Visibility | Average Speed Of Road Vehicle (
Observed)
(km/hr) | Distance of Stop Line from Crossing (Direction1) | Distance of Speed Breaker from Crossing | SSD (as Per IRC) in Meters | SSD New in Meters |
|---|---|---|---|---|---|---|---|---|---|
| 1 | <1% | 2.23 | 3.58 | 881.25 | 17.68 | 2.85 | 23.26 | 14.99 | 15.04 |
| 2 | 1–2% | 2.27 | 3.78 | 854.17 | 18.97 | 2.50 | 20.21 | 15.70 | 16.17 |
| 3 | 2–3% | 2.11 | 4.74 | 850.00 | 15.86 | 4.14 | 21.19 | 12.03 | 11.64 |
| 4 | >3% | 2.36 | 4.49 | 817.33 | 17.11 | 4.85 | 18.58 | 14.07 | 14.13 |
| Train Speed | Unmanned Level Crossing Category(i) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Road Vehicle Length ‘l’ (m) | ||||||||||||
| 0.5 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| 10 | 1 | 0.41 | 0.42 | 0.42 | 0.43 | 0.43 | 0.44 | 0.44 | 0.45 | 0.46 | 0.46 | 0.47 |
| 2 | 0.39 | 0.40 | 0.40 | 0.41 | 0.41 | 0.42 | 0.42 | 0.43 | 0.43 | 0.44 | 0.44 | |
| 3 | 0.37 | 0.37 | 0.38 | 0.39 | 0.39 | 0.40 | 0.41 | 0.41 | 0.42 | 0.42 | 0.43 | |
| 4 | 0.38 | 0.39 | 0.39 | 0.40 | 0.40 | 0.41 | 0.41 | 0.42 | 0.43 | 0.43 | 0.44 | |
| 20 | 1 | 0.83 | 0.83 | 0.84 | 0.85 | 0.87 | 0.88 | 0.89 | 0.90 | 0.91 | 0.92 | 0.93 |
| 2 | 0.79 | 0.79 | 0.80 | 0.81 | 0.82 | 0.83 | 0.84 | 0.86 | 0.87 | 0.88 | 0.89 | |
| 3 | 0.74 | 0.75 | 0.76 | 0.77 | 0.79 | 0.80 | 0.81 | 0.82 | 0.84 | 0.85 | 0.86 | |
| 4 | 0.76 | 0.77 | 0.78 | 0.79 | 0.81 | 0.82 | 0.83 | 0.84 | 0.85 | 0.86 | 0.88 | |
| 30 | 1 | 1.24 | 1.25 | 1.26 | 1.28 | 1.30 | 1.31 | 1.33 | 1.35 | 1.37 | 1.38 | 1.40 |
| 2 | 1.18 | 1.19 | 1.20 | 1.22 | 1.24 | 1.25 | 1.27 | 1.28 | 1.30 | 1.31 | 1.33 | |
| 3 | 1.11 | 1.12 | 1.14 | 1.16 | 1.18 | 1.20 | 1.22 | 1.23 | 1.25 | 1.27 | 1.29 | |
| 4 | 1.15 | 1.16 | 1.17 | 1.19 | 1.21 | 1.23 | 1.24 | 1.26 | 1.28 | 1.30 | 1.31 | |
| 40 | 1 | 1.65 | 1.66 | 1.69 | 1.71 | 1.73 | 1.75 | 1.78 | 1.80 | 1.82 | 1.84 | 1.87 |
| 2 | 1.57 | 1.58 | 1.61 | 1.63 | 1.65 | 1.67 | 1.69 | 1.71 | 1.73 | 1.75 | 1.77 | |
| 3 | 1.48 | 1.50 | 1.52 | 1.55 | 1.57 | 1.60 | 1.62 | 1.65 | 1.67 | 1.70 | 1.72 | |
| 4 | 1.53 | 1.54 | 1.56 | 1.59 | 1.61 | 1.63 | 1.66 | 1.68 | 1.71 | 1.73 | 1.75 | |
| 50 | 1 | 2.06 | 2.08 | 2.11 | 2.13 | 2.16 | 2.19 | 2.22 | 2.25 | 2.28 | 2.30 | 2.33 |
| 2 | 1.97 | 1.98 | 2.01 | 2.03 | 2.06 | 2.09 | 2.11 | 2.14 | 2.16 | 2.19 | 2.22 | |
| 3 | 1.85 | 1.87 | 1.90 | 1.93 | 1.96 | 1.99 | 2.03 | 2.06 | 2.09 | 2.12 | 2.15 | |
| 4 | 1.91 | 1.93 | 1.96 | 1.99 | 2.01 | 2.04 | 2.07 | 2.10 | 2.13 | 2.16 | 2.19 | |
| 60 | 1 | 2.48 | 2.49 | 2.53 | 2.56 | 2.60 | 2.63 | 2.66 | 2.70 | 2.73 | 2.77 | 2.80 |
| 2 | 2.36 | 2.38 | 2.41 | 2.44 | 2.47 | 2.50 | 2.53 | 2.57 | 2.60 | 2.63 | 2.66 | |
| 3 | 2.22 | 2.24 | 2.28 | 2.32 | 2.36 | 2.39 | 2.43 | 2.47 | 2.51 | 2.55 | 2.58 | |
| 4 | 2.29 | 2.31 | 2.35 | 2.38 | 2.42 | 2.45 | 2.49 | 2.52 | 2.56 | 2.59 | 2.63 | |
| 70 | 1 | 2.89 | 2.91 | 2.95 | 2.99 | 3.03 | 3.07 | 3.11 | 3.15 | 3.19 | 3.23 | 3.27 |
| 2 | 2.75 | 2.77 | 2.81 | 2.85 | 2.88 | 2.92 | 2.96 | 2.99 | 3.03 | 3.07 | 3.10 | |
| 3 | 2.59 | 2.62 | 2.66 | 2.70 | 2.75 | 2.79 | 2.84 | 2.88 | 2.93 | 2.97 | 3.01 | |
| 4 | 2.68 | 2.70 | 2.74 | 2.78 | 2.82 | 2.86 | 2.90 | 2.94 | 2.98 | 3.02 | 3.07 | |
| Validation Statistical Parameters | Values |
|---|---|
| MAE | 3.59 |
| MSE | 13.83 |
| RMSE | 3.71 |
| MAPE (%) | 28% |
| Feature Name | Feature Importance |
|---|---|
| Speed of Road Vehicles | 0.00338 |
| Perception and Reaction Time | −0.00003 |
| Road Visibility | −0.4159 |
| Distance of Speed Breaker from Crossing | −0.00152 |
| Pavement Condition Rating | 0.93083 |
| Average Daily Traffic | 4.61061 |
| Approach Road Gradient | −24.71019 |
| Road Width | 0.03339 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singhal, V.; Anand, D.; Aljahdali, H.M.; Goyal, N.; Singh, A.; Kadry, S. An Intelligent and Autonomous Sight Distance Evaluation Framework for Sustainable Transportation. Sustainability 2021, 13, 8885. https://doi.org/10.3390/su13168885
Singhal V, Anand D, Aljahdali HM, Goyal N, Singh A, Kadry S. An Intelligent and Autonomous Sight Distance Evaluation Framework for Sustainable Transportation. Sustainability. 2021; 13(16):8885. https://doi.org/10.3390/su13168885
Chicago/Turabian StyleSinghal, Vivek, Divya Anand, Hani Moaiteq Aljahdali, Nitin Goyal, Aman Singh, and Seifedine Kadry. 2021. "An Intelligent and Autonomous Sight Distance Evaluation Framework for Sustainable Transportation" Sustainability 13, no. 16: 8885. https://doi.org/10.3390/su13168885