
Dependence of IPMSM Motor Efficiency on Parameter Estimates



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Motor Efficiency and Maximum Torque per Current
2.1. Maximum Torque per Current (MTPC)
2.2. Parameter Estimation
2.2.1. Flux Linkage Map (FLM)
2.2.2. Frequency Domain Identification in Standstill (OffFreq)
2.2.3. Online Frequency Domain Identification (OlFreq)
2.2.4. Recursive Least Squares (RLS)
2.3. Optimal MTPC Using Torque Sensor
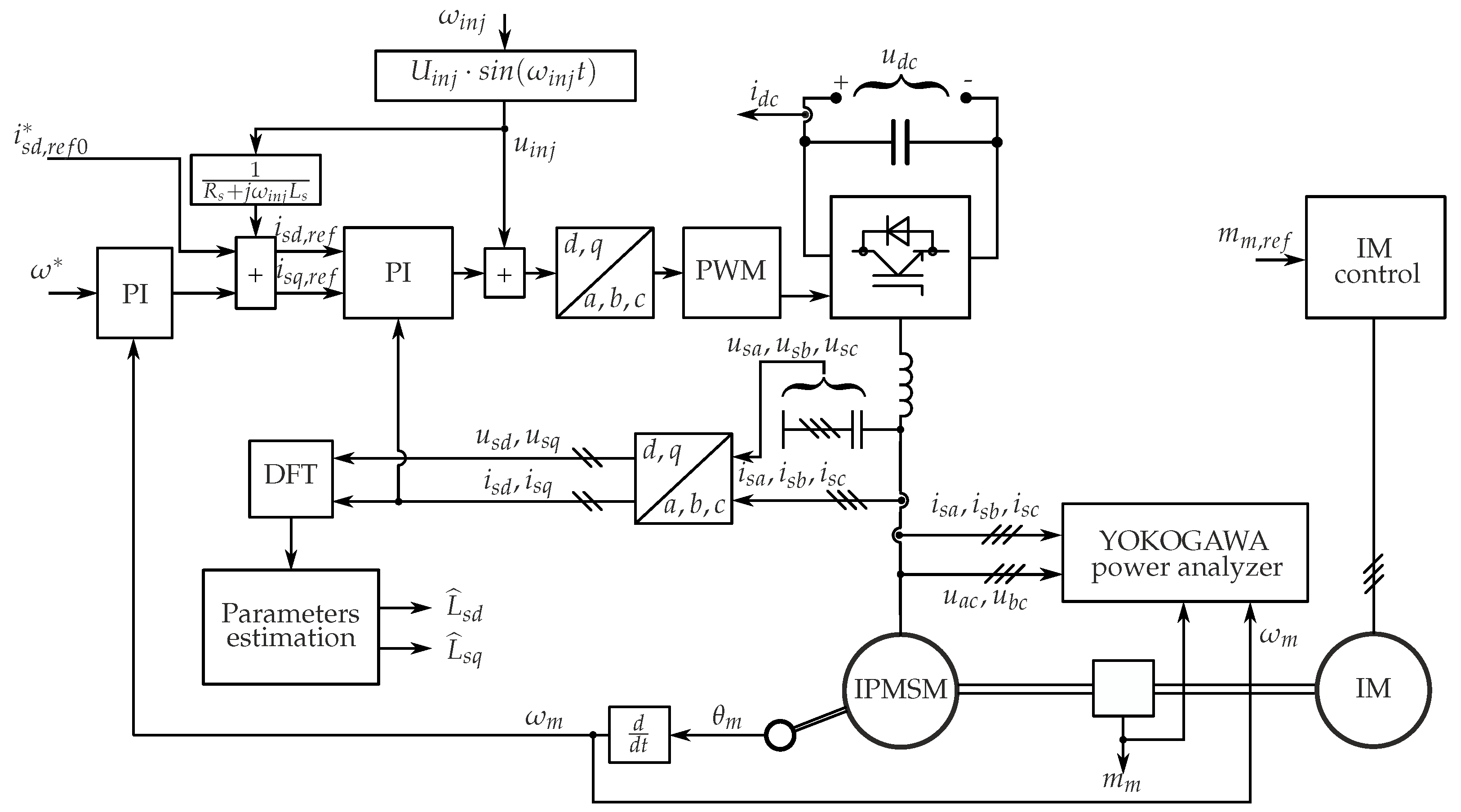
3. Laboratory Equipment
4. Experimental Results
4.1. Estimated Parameters
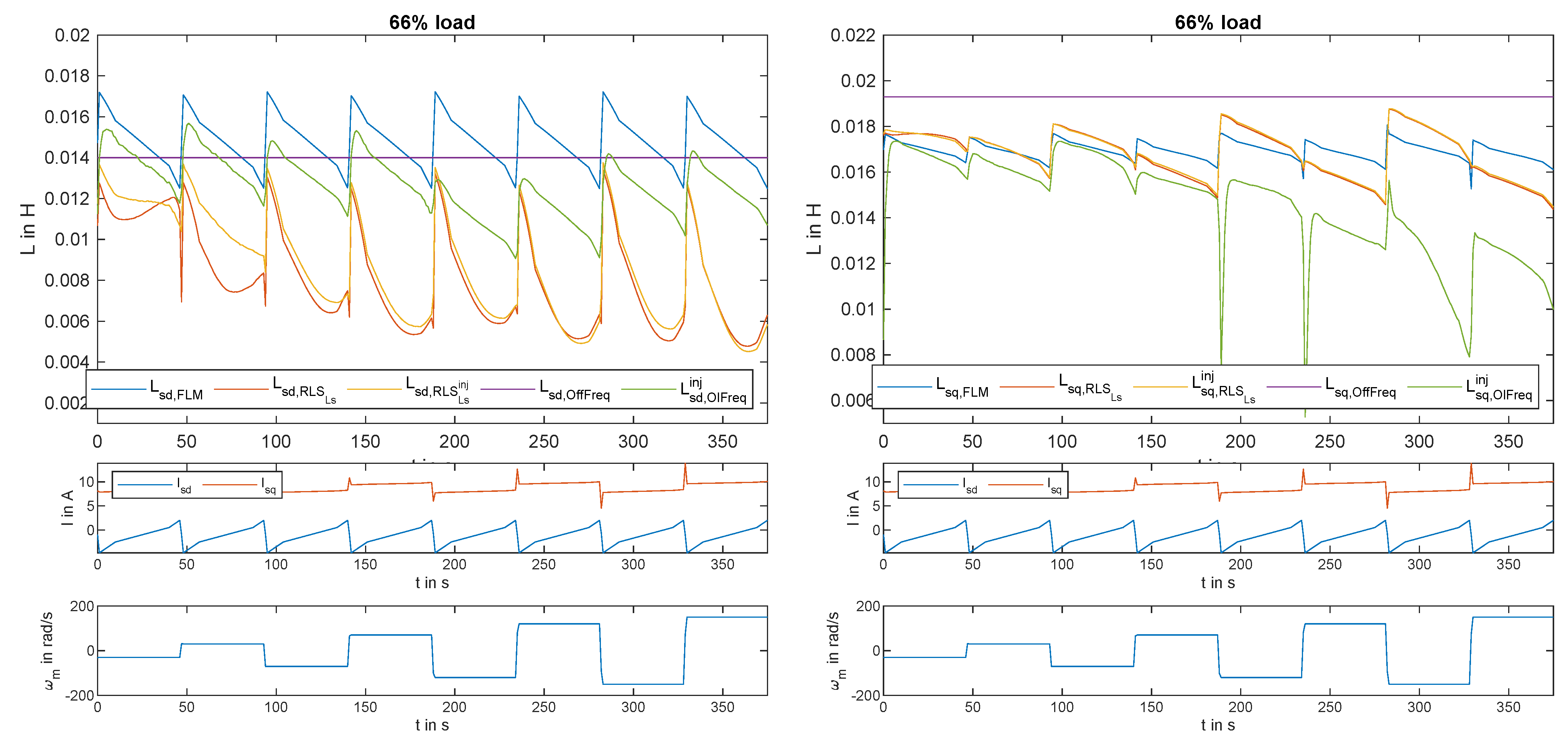
- Injections of the excitation signal significantly improve the accuracy of the RLS-based methods in all regimes except the full load conditions. This may be related to the inductance saturation or signal-to-noise ratio of the current measurements.
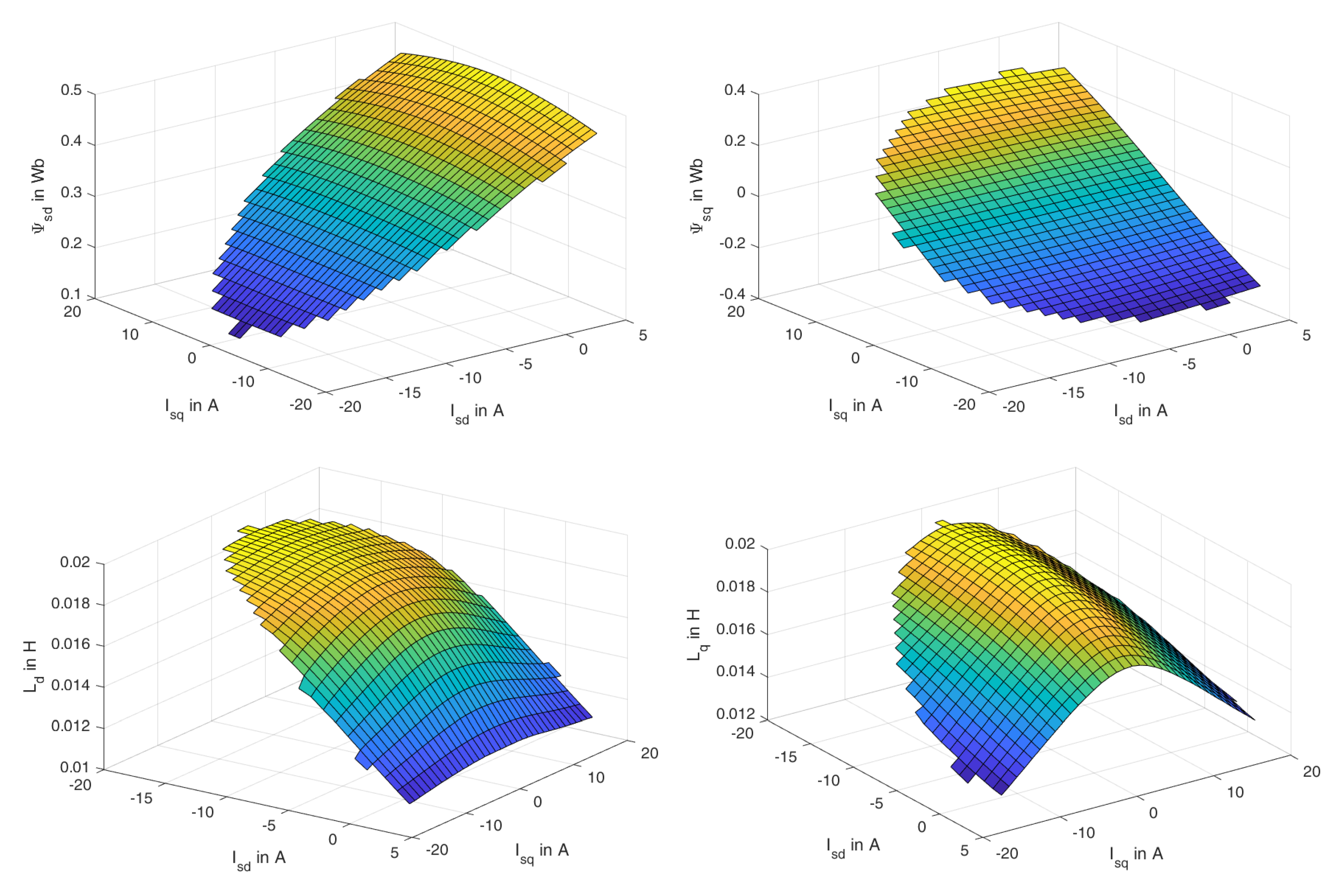
- For all methods with constant , the estimated inductance is decreasing with the increasing rotation speed, and is strongly current-dependent, see Figure 5. Estimates of the inductances obtained by the RLS that jointly estimate the flux are stabilized at values significantly lower than nominal, the variability has been absorbed by the flux parameter, see Figure 6. This seems to be an artifact of the RLS approach, since parameter variability can be tuned in more sophisticated methods such as the extended Kalman filter.
- The peak on the estimate obtained by the OlFreq method in Figure 5 is caused by the interference of the injected signal and multiples of the mechanical frequency during the transient.
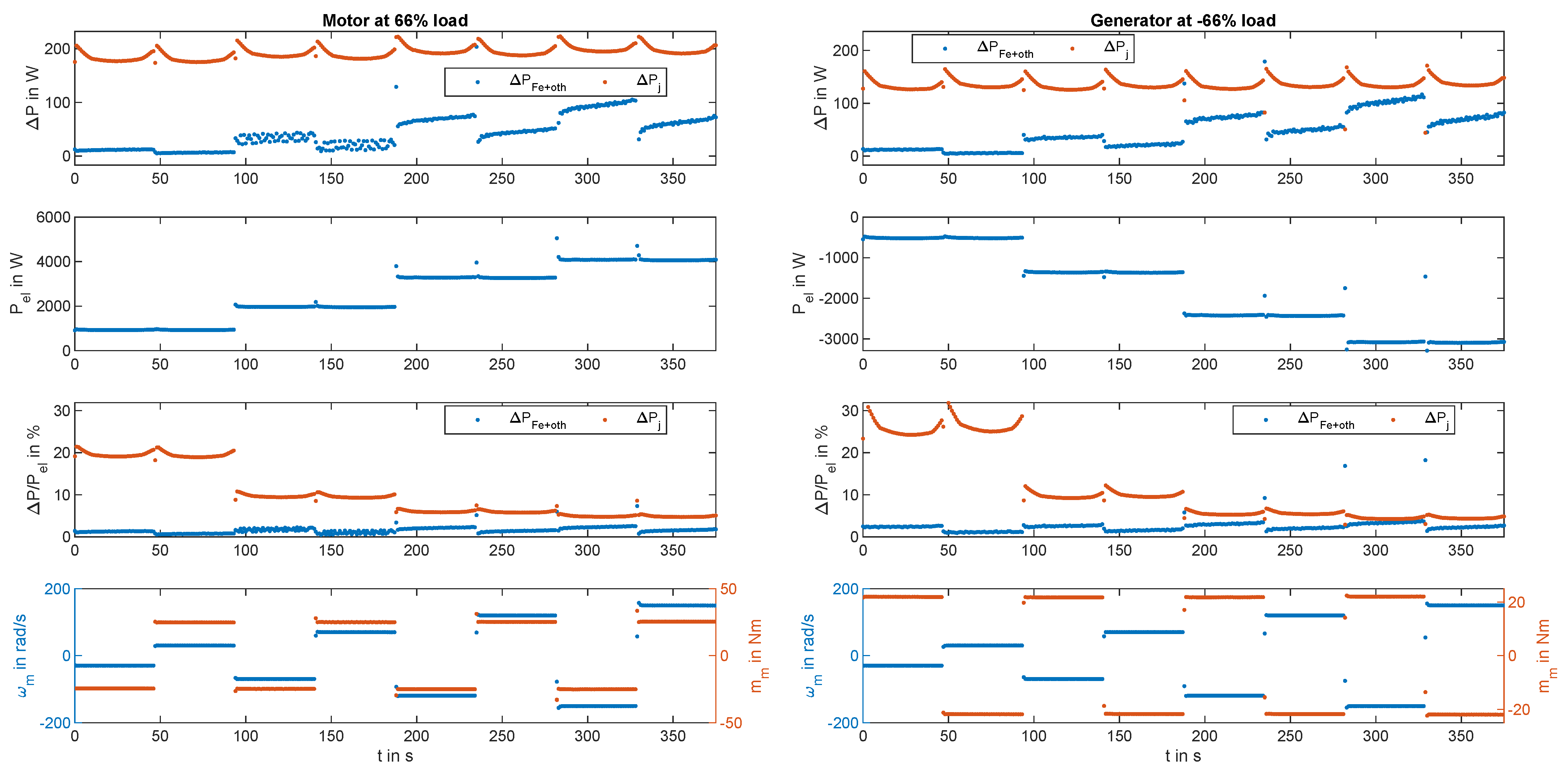
4.2. Analysis of Motor Losses
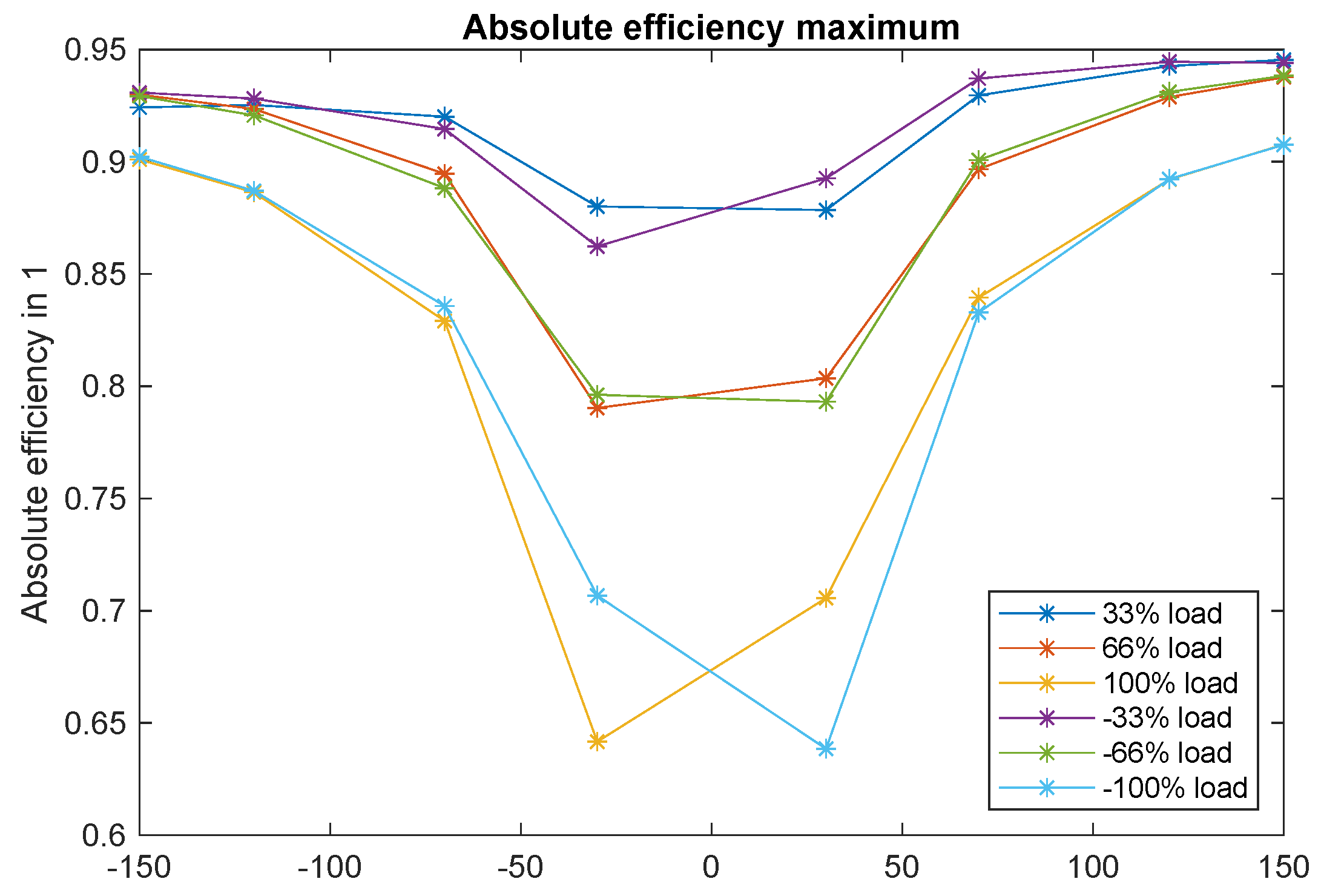
4.3. Efficiency Evaluation
4.4. Discussion
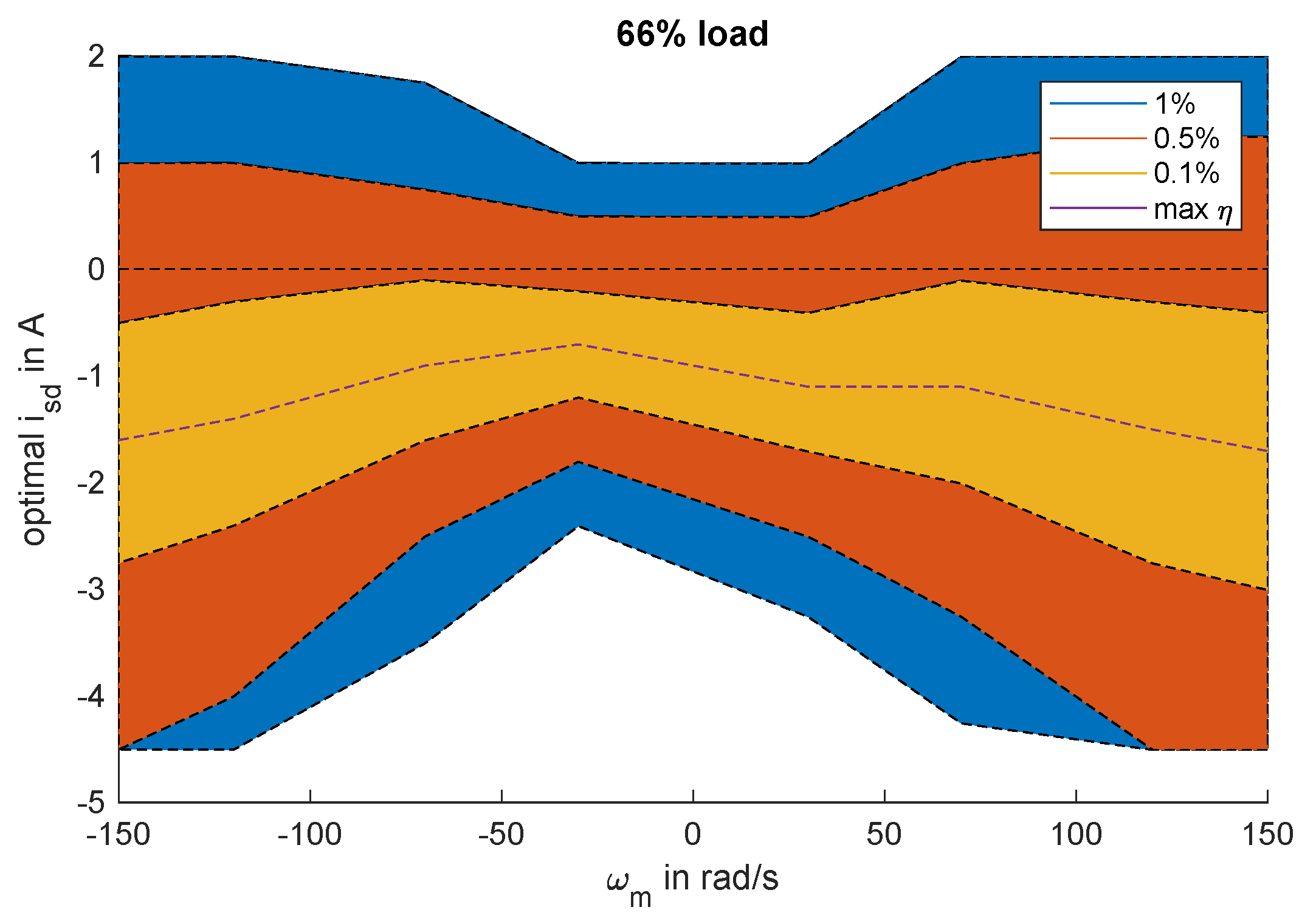
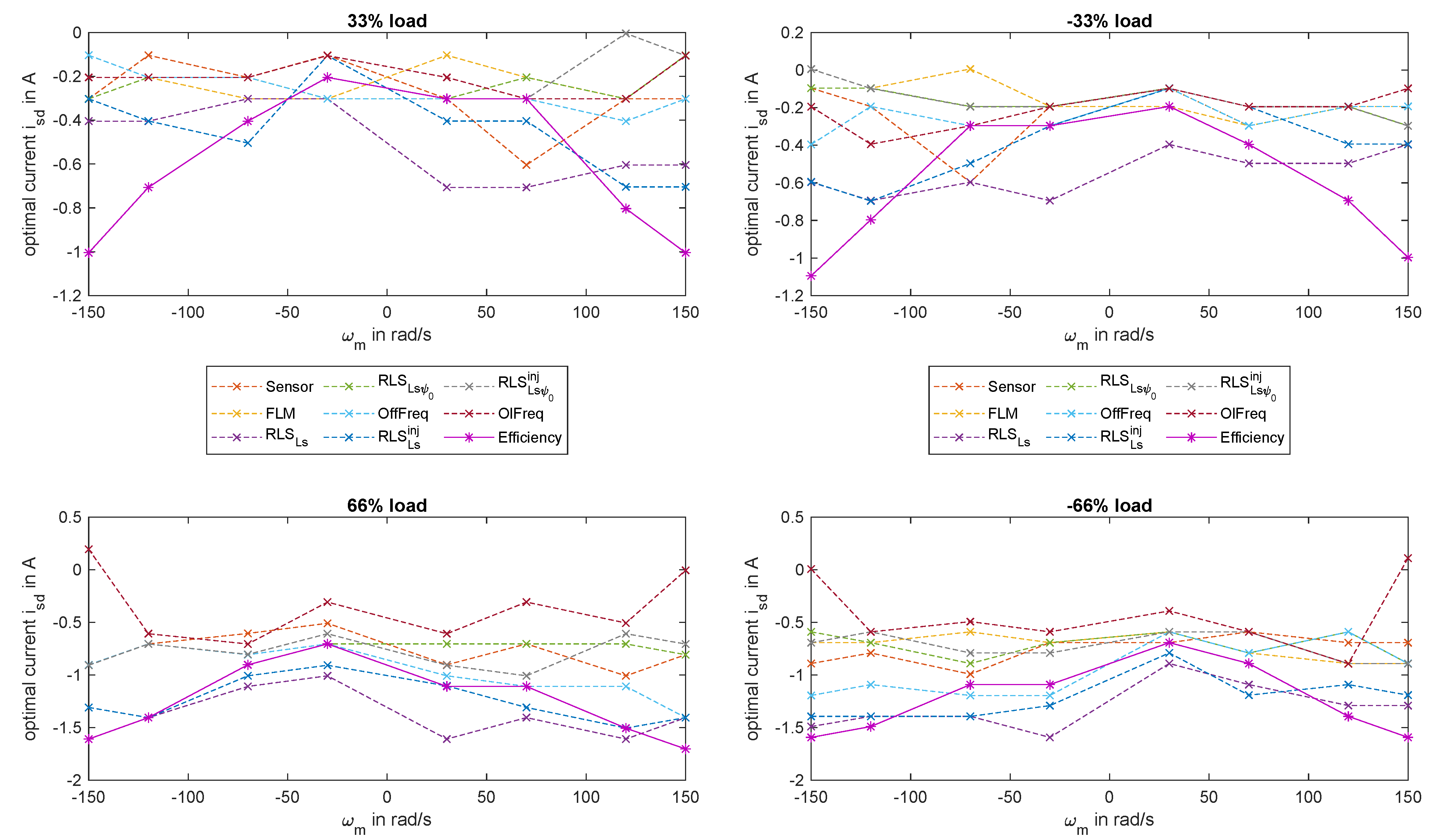
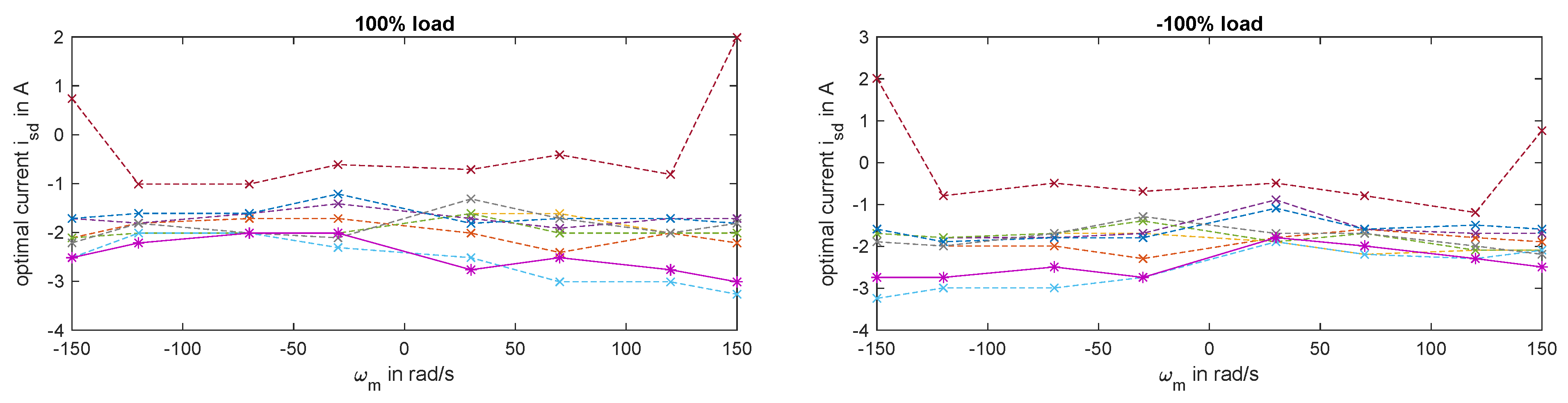
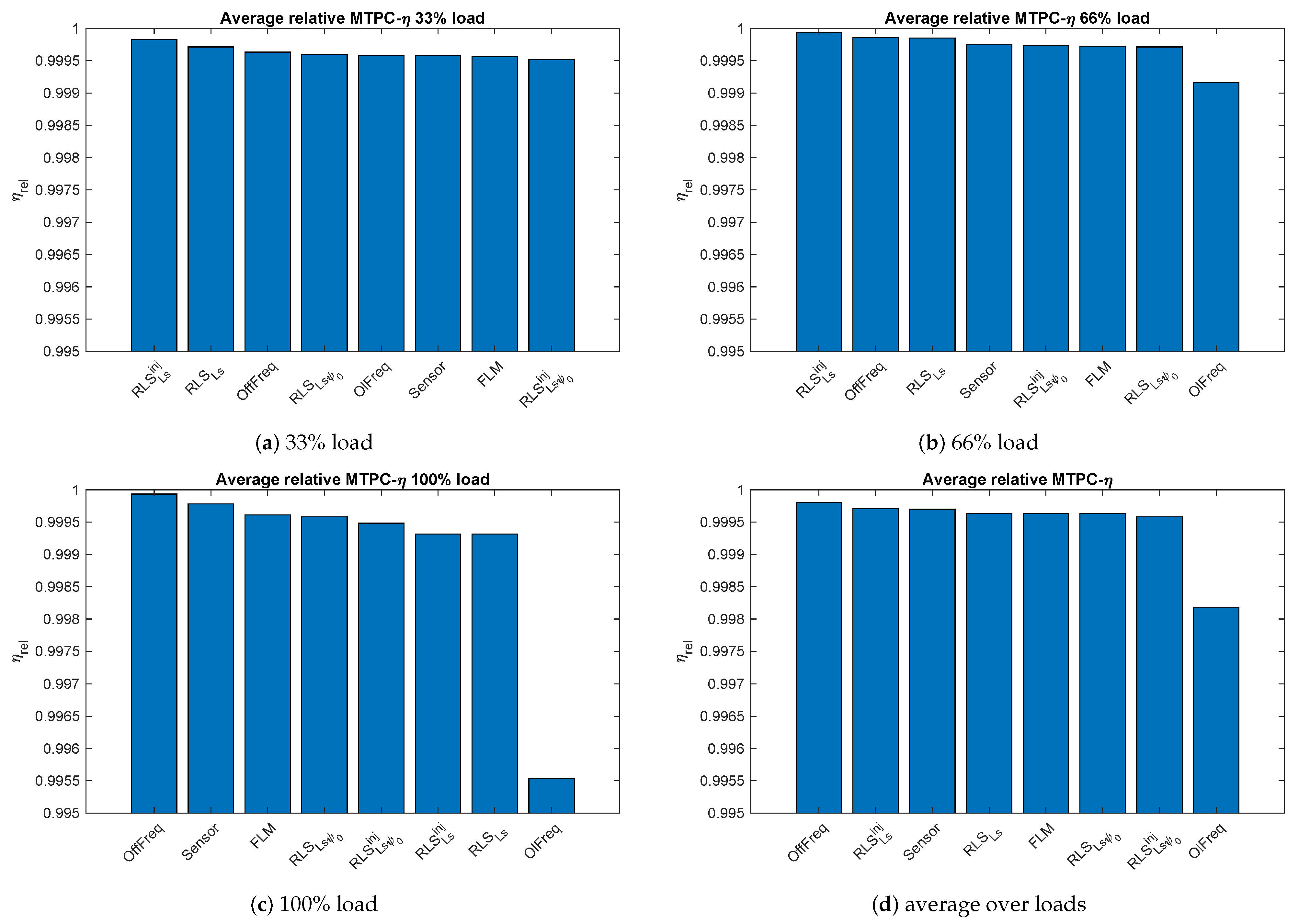
- All parametric methods optimize the MPTC and in ideal condition should approach the results of the Sensor method which measures the optimal MPTC. However, it is not the most efficient method when other losses are taken into account. Thus bias in the estimated parameters method may actually improve the overall efficiency of the method if the bias is systematic towards the overall efficiency. This seems to be the case for the OffFreq method, which always performs better than Sensor and the RLS version at low loads. This clearly suggests that MTPC is not the optimal criteria and should be replaced by maximum torque per losses (MPTL) which also minimizes iron losses in the machine (for details see [10,29]).
- The best overall efficiency was obtained for parameters obtained from offline identification by the frequency analysis, see Figure 13. This is due to its consistency, being one of the top three methods at all loads. It is clearly the best at 100% load condition. For lower loads, the RLS method achieves marginally better results. This may be surprising, since OffFreq uses fixed parameters without any adaptation to operating conditions. This suggests that consistency of the method across operating regimes is more important than its accuracy under come conditions. This can be demonstrated by the OlFreq methods that perform well under 33% loads, but quickly deteriorates for higher loads.
- The findings of [23] that RLS is capable to improve drive efficiency are confirmed only for profiles with a low percentage of the full load operation. If the profile contains more full load conditions, the outcome may be quite the opposite and the RLS will yield worse efficiency than that with constant parameters. However, such conditions are unlikely in many applications such as electro-mobility and the use of RLS for parameter estimation can be recommended.
- The relative efficiency of the methods based on RLS slightly improves with the injection of the excitation signal. However, a decrease in performance was also observed for the method.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brousek, J.; Krcmar, L.; Rydlo, P. Efficiency Measuring of Electric Drive with Traction Synchronous Motor with Permanent Magnets. In Proceedings of the 2021 IEEE International Workshop of Electronics, Control, Measurement, Signals and their application to Mechatronics (ECMSM), Liberec, Czech Republic, 21–22 June 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Sivkov, O.; Novak, J. Flux Weakening Control of Permanent Magnet Synchronous Motor with Losses Reduction. In Proceedings of the 2021 XVIII International Scientific Technical Conference Alternating Current Electric Drives (ACED), Ekaterinburg, Russia, 24–27 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Stipetic, S.; Goss, J.; Zarko, D.; Popescu, M. Calculation of Efficiency Maps Using a Scalable Saturated Model of Synchronous Permanent Magnet Machines. IEEE Trans. Ind. Appl. 2018, 54, 4257–4267. [Google Scholar] [CrossRef]
- Rassolkin, A.; Heidari, H.; Kallaste, A.; Vaimann, T.; Acedo, J.P.; Romero-Cadaval, E. Efficiency Map Comparison of Induction and Synchronous Reluctance Motors. In Proceedings of the 2019 26th International Workshop on Electric Drives: Improvement in Efficiency of Electric Drives (IWED), Moscow, Russia, 30 January–2 February 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Ferrari, S.; Ragazzo, P.; Dilevrano, G.; Pellegrino, G. Flux-Map Based FEA Evaluation of Synchronous Machine Efficiency Maps. In Proceedings of the 2021 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021; pp. 76–81. [Google Scholar] [CrossRef]
- Jiang, W.; Feng, S.; Zhang, Z.; Zhang, J.; Zhang, Z. Study of Efficiency Characteristics of Interior Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Golzar, M.; Van Khang, H.; Hubert Choux, M.M.; Midtbo Versland, A.M. Experimental Investigation of Efficiency Map for an Inverter-Fed Surface-Mount Permanent Magnet Synchronous Motor. In Proceedings of the 2019 8th International Conference on Renewable Energy Research and Applications (ICRERA), Brasov, Romania, 3–6 November 2019; pp. 551–556. [Google Scholar] [CrossRef]
- Eldeeb, H.; Hackl, C.M.; Horlbeck, L.; Kullick, J. A unified theory for optimal feedforward torque control of anisotropic synchronous machines. Int. J. Control 2018, 91, 2273–2302. [Google Scholar] [CrossRef]
- Chen, Z.; Li, W.; Shu, X.; Shen, J.; Zhang, Y.; Shen, S. Operation Efficiency Optimization for Permanent Magnet Synchronous Motor Based on Improved Particle Swarm Optimization. IEEE Access 2021, 9, 777–788. [Google Scholar] [CrossRef]
- Hackl, C.; Kullick, J.; Monzen, N. Generic loss minimization for nonlinear synchronous machines by analytical computation of optimal reference currents considering copper and iron losses. In Proceedings of the 2021 22nd IEEE International Conference on Industrial Technology (ICIT), Valencia, Spain, 10–12 March 2021; Volume 1, pp. 1348–1355. [Google Scholar] [CrossRef]
- Glac, A.; Šmídl, V.; Peroutka, Z. Optimal Feedforward Torque Control of Synchronous Machines with Time-Varying Parameters. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 613–618. [Google Scholar] [CrossRef]
- Glac, A.; Šmídl, V.; Peroutka, Z.; Hackl, C.M. Comparison of IPMSM Parameter Estimation Methods for Motor Efficiency. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 895–900. [Google Scholar] [CrossRef]
- Eldeeb, H.M.; Abdel-Khalik, A.S.; Hackl, C.M. Dynamic Modeling of Dual Three-Phase IPMSM Drives With Different Neutral Configurations. IEEE Trans. Ind. Electron. 2019, 66, 141–151. [Google Scholar] [CrossRef]
- Liu, K.; Feng, J.; Guo, S.; Xiao, L.; Zhu, Z. Identification of Flux Linkage Map of Permanent Magnet Synchronous Machines Under Uncertain Circuit Resistance and Inverter Nonlinearity. IEEE Trans. Ind. Inform. 2018, 14, 556–568. [Google Scholar] [CrossRef]
- Brosch, A.; Hanke, S.; Wallscheid, O.; Böcker, J. Data-Driven Recursive Least Squares Estimation for Model Predictive Current Control of Permanent Magnet Synchronous Motors. IEEE Trans. Power Electron. 2021, 36, 2179–2190. [Google Scholar] [CrossRef]
- Rafaq, M.S.; Jung, J.W. A Comprehensive Review of State-of-the-Art Parameter Estimation Techniques for Permanent Magnet Synchronous Motors in Wide Speed Range. IEEE Trans. Ind. Inform. 2020, 16, 4747–4758. [Google Scholar] [CrossRef]
- Li, X.; Kennel, R. Comparison of state-of-the-art estimators for electrical parameter identification of PMSM. In Proceedings of the 2019 IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Quanzhou, China, 31 May–2 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Li, S.; Sarlioglu, B.; Jurkovic, S.; Patel, N.R.; Savagian, P. Comparative Analysis of Torque Compensation Control Algorithms of Interior Permanent Magnet Machines for Automotive Applications Considering the Effects of Temperature Variation. IEEE Trans. Transp. Electrif. 2017, 3, 668–681. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Liang, D.; Liu, K. Online Parameter Estimation for Permanent Magnet Synchronous Machines: An Overview. IEEE Access 2021, 9, 59059–59084. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, G.; Zhao, N.; Zhang, G.; Cui, Q.; Xu, D. An Impedance Model-Based Multiparameter Identification Method of PMSM for Both Offline and Online Conditions. IEEE Trans. Power Electron. 2021, 36, 727–738. [Google Scholar] [CrossRef]
- Kallio, S.; Karttunen, J.; Peltoniemi, P.; Silventoinen, P.; Pyrhönen, O. Online Estimation of Double-Star IPM Machine Parameters Using RLS Algorithm. IEEE Trans. Ind. Electron. 2014, 61, 4519–4530. [Google Scholar] [CrossRef]
- Cao, M.; Migita, H. A High Efficiency Control of IPMSM with Online Parameter Estimation. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea, 7–10 October 2018; pp. 1421–1424. [Google Scholar] [CrossRef]
- Nguyen, Q.K.; Petrich, M.; Roth-Stielow, J. Implementation of the MTPA and MTPV control with online parameter identification for a high speed IPMSM used as traction drive. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 318–323. [Google Scholar] [CrossRef]
- Noguchi, T.; Kumakiri, Y. On-line parameter identification of IPM motor using instantaneous reactive power for robust maximum torque per ampere control. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015. [Google Scholar] [CrossRef]
- Nalakath, S.; Preindl, M.; Emadi, A. Online multi-parameter estimation of interior permanent magnet motor drives with finite control set model predictive control. IET Electr. Power Appl. 2017, 11, 944–951. [Google Scholar] [CrossRef] [Green Version]
- Choi, K.; Kim, Y.; Kim, K.; Kim, S. Using the Stator Current Ripple Model for Real-Time Estimation of Full Parameters of a Permanent Magnet Synchronous Motor. IEEE Access 2019, 7, 33369–33379. [Google Scholar] [CrossRef]
- Xu, Y.; Yang, K.; Liu, A.; Wang, X.; Jiang, F. Online Parameter Identification Based on MTPA Operation for IPMSM. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Hackl, C.M. Speed and Position Control of Industrial Servo-Systems. In Non-Identifier Based Adaptive Control in Mechatronics: Theory and Application; Springer International Publishing: Cham, Switzerland, 2017; pp. 321–433. [Google Scholar] [CrossRef]
- Hackl, C.; Kullick, J.; Monzen, N.; Böcker, J.; Griepentrog, G. Optimale betriebsführung für nichtlineare synchronmaschinen. In Elektrische Antriebe–Regelung von Antriebssystemen; Böcker, J., Griepentrog, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glac, A.; Šmídl, V.; Peroutka, Z.; Hackl, C.M. Dependence of IPMSM Motor Efficiency on Parameter Estimates. Sustainability 2021, 13, 9299. https://doi.org/10.3390/su13169299
Glac A, Šmídl V, Peroutka Z, Hackl CM. Dependence of IPMSM Motor Efficiency on Parameter Estimates. Sustainability. 2021; 13(16):9299. https://doi.org/10.3390/su13169299
Chicago/Turabian StyleGlac, Antonín, Václav Šmídl, Zdeněk Peroutka, and Christoph M. Hackl. 2021. "Dependence of IPMSM Motor Efficiency on Parameter Estimates" Sustainability 13, no. 16: 9299. https://doi.org/10.3390/su13169299