
Optimization of PEMFC Model Parameters Using Meta-Heuristics

 ,
, 
Abstract
:1. Introduction
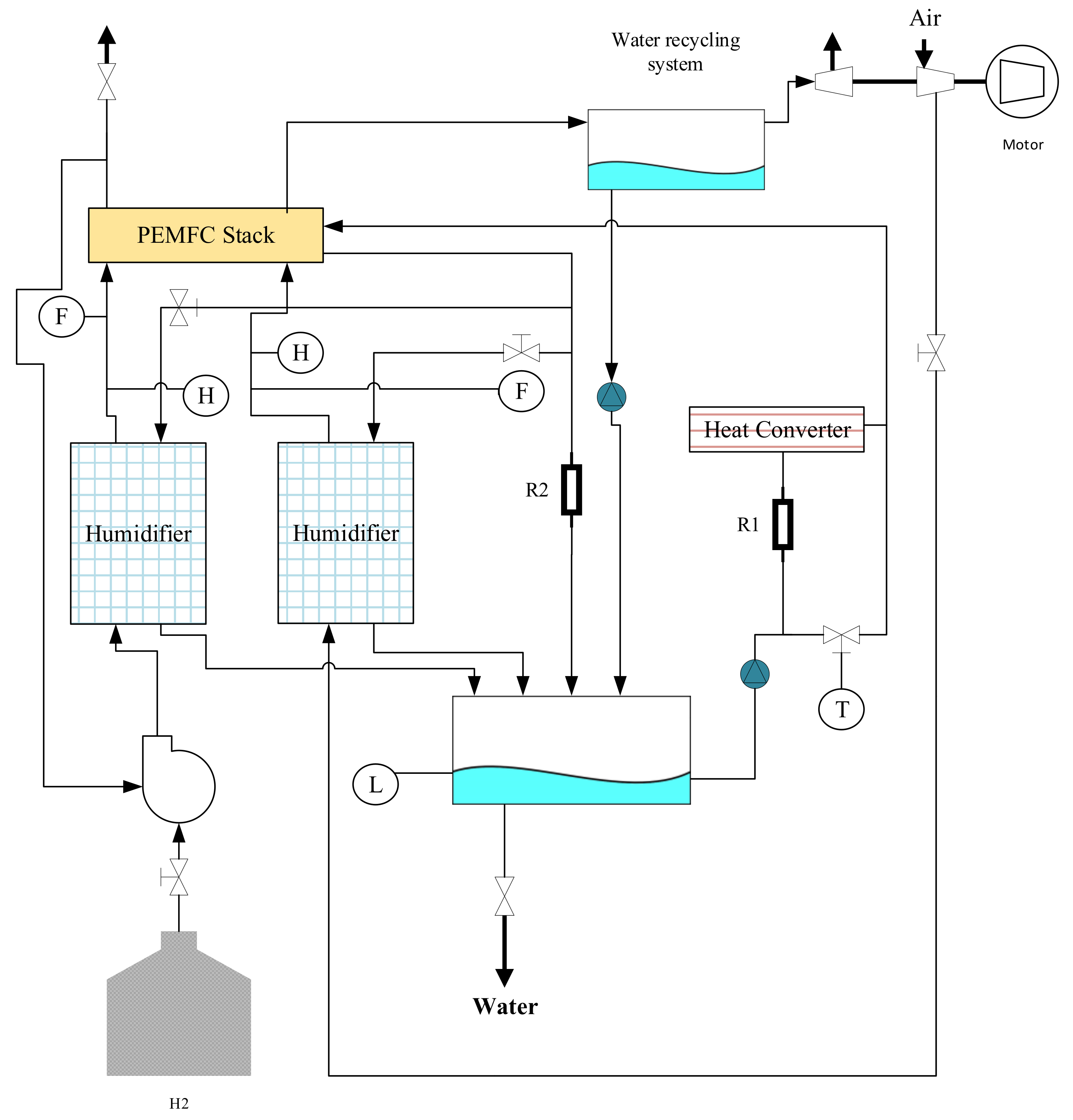
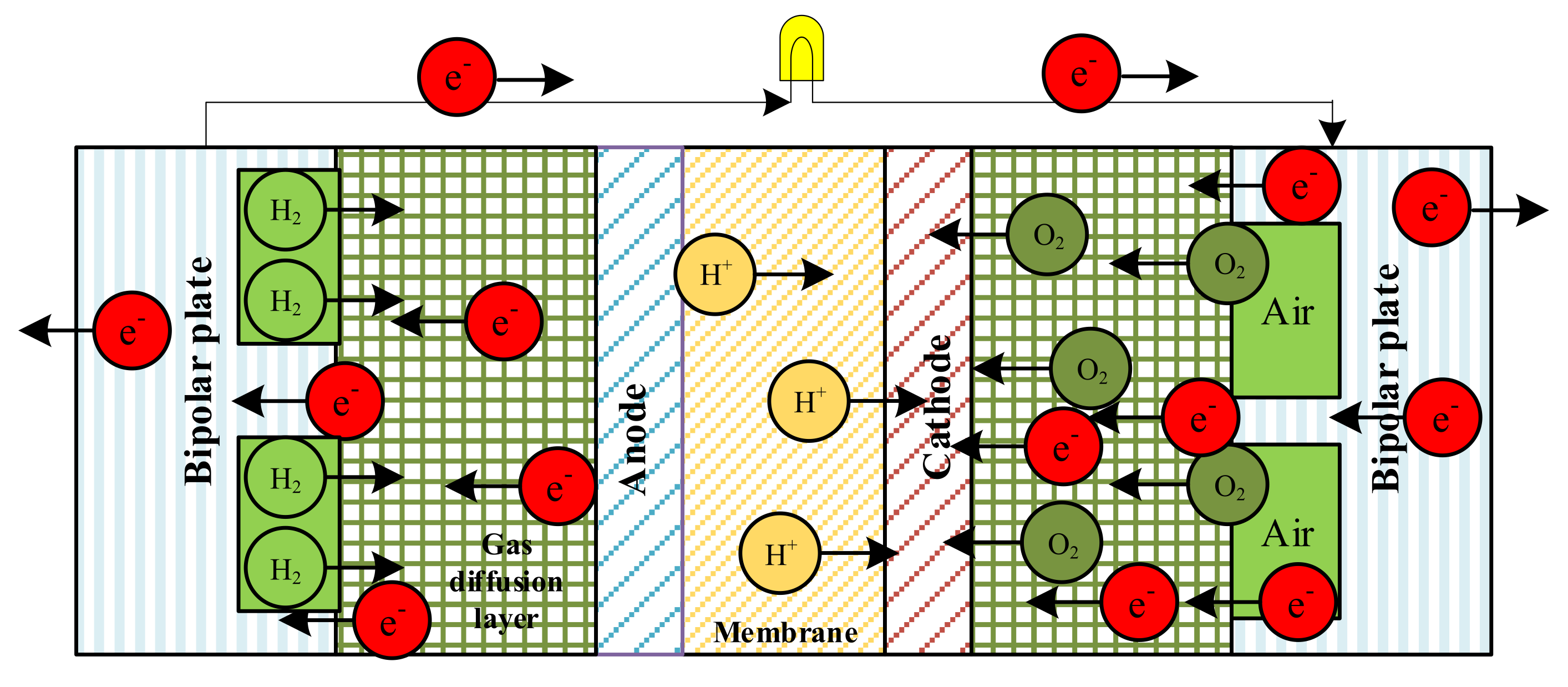
2. The Model of the Studied System
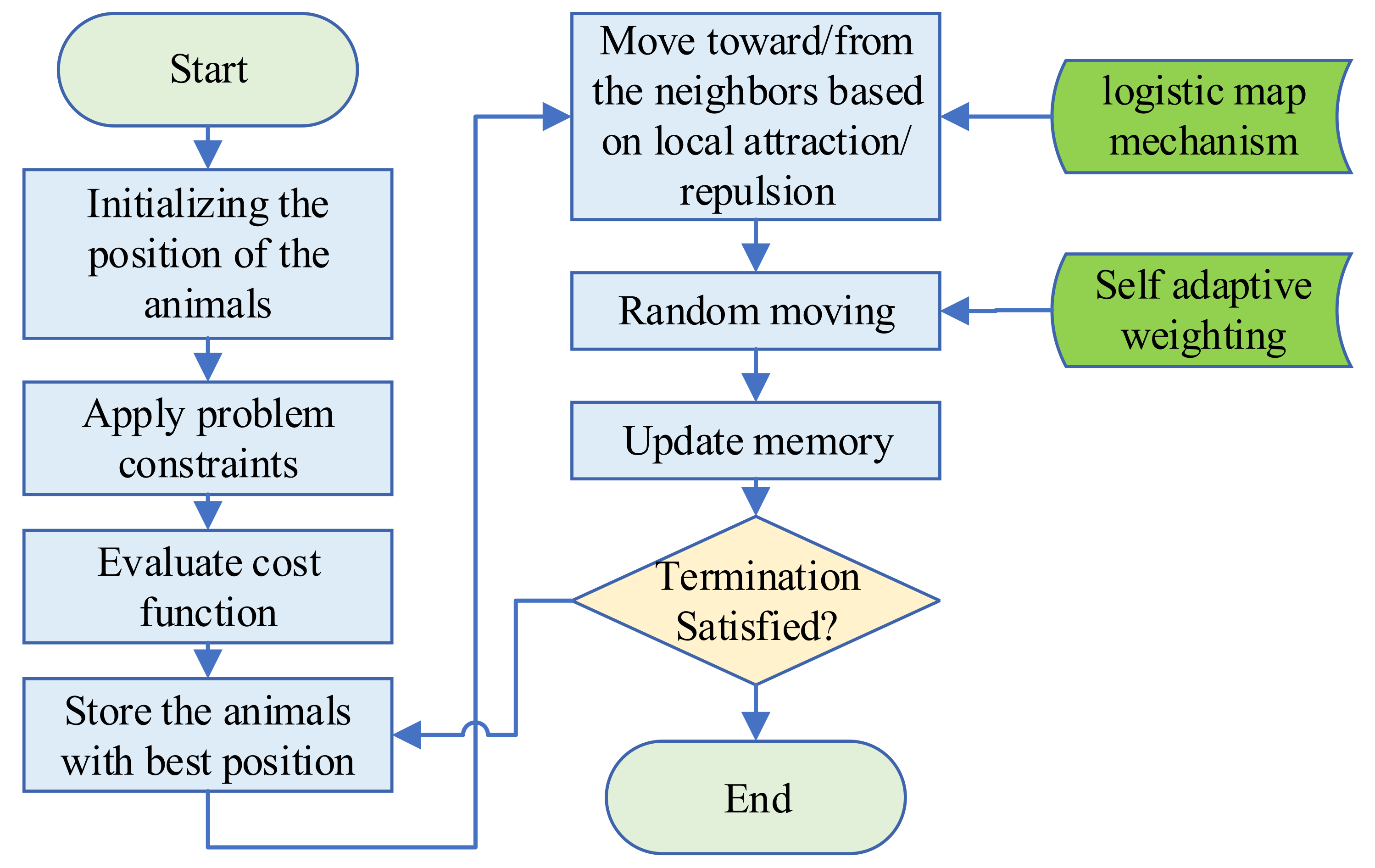
2.1. Collective Animal Behavior Algorithm
2.2. Algorithm Confirmation
3. Results and Discussion
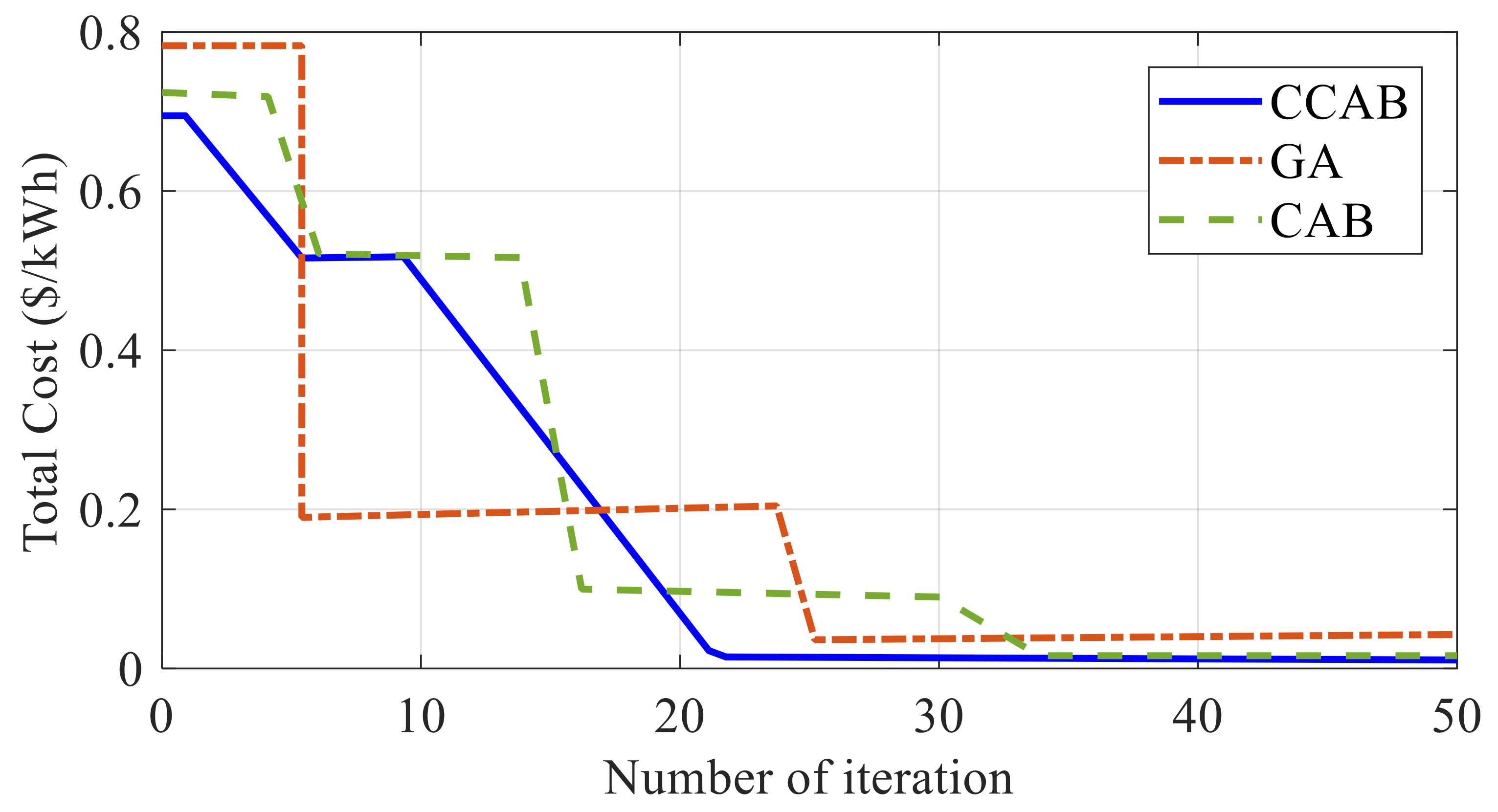
3.1. Calculation of Optimum Parameters
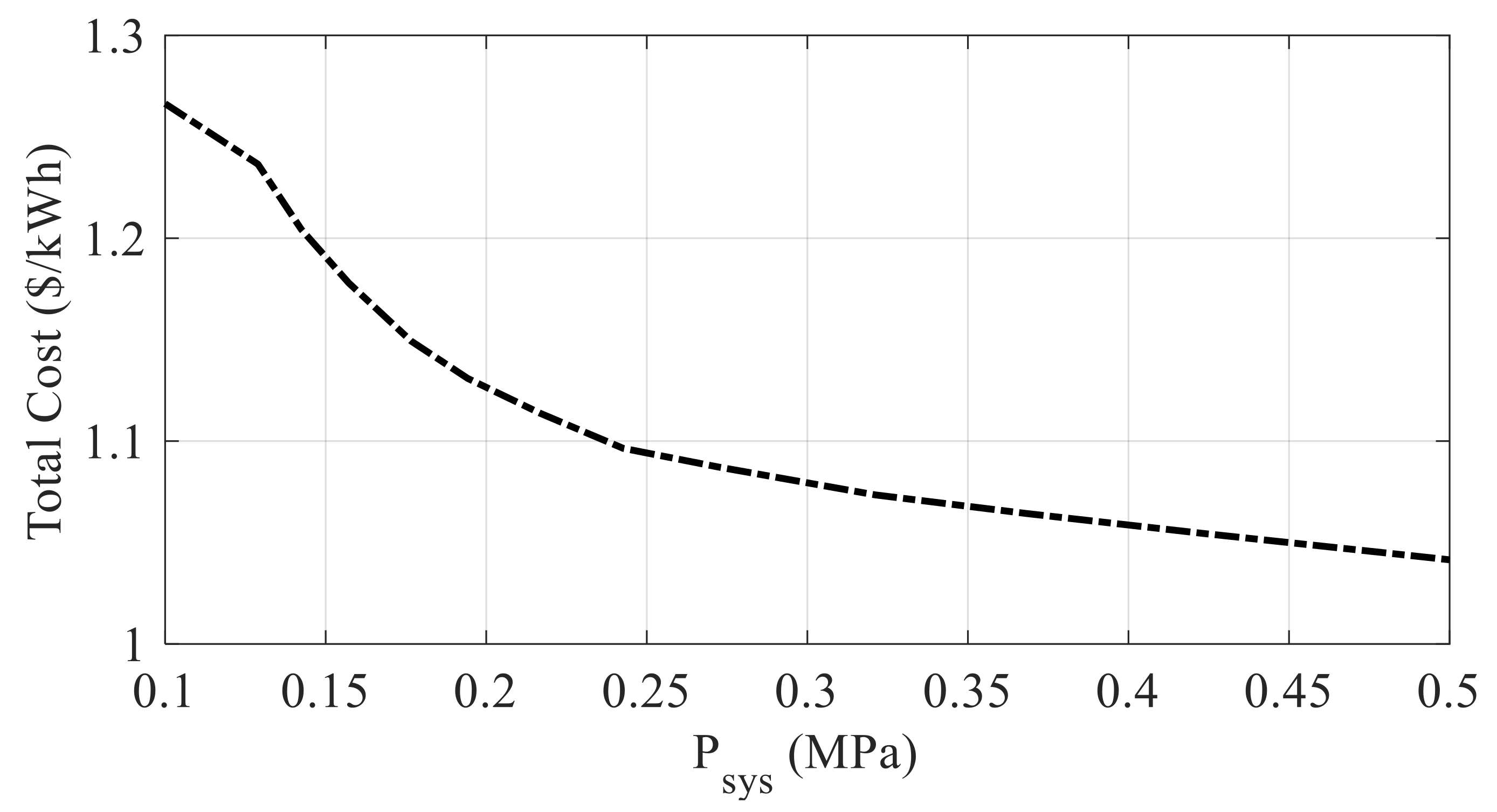
3.2. The Pressure Changes Affect the Construction Cost of the Cell
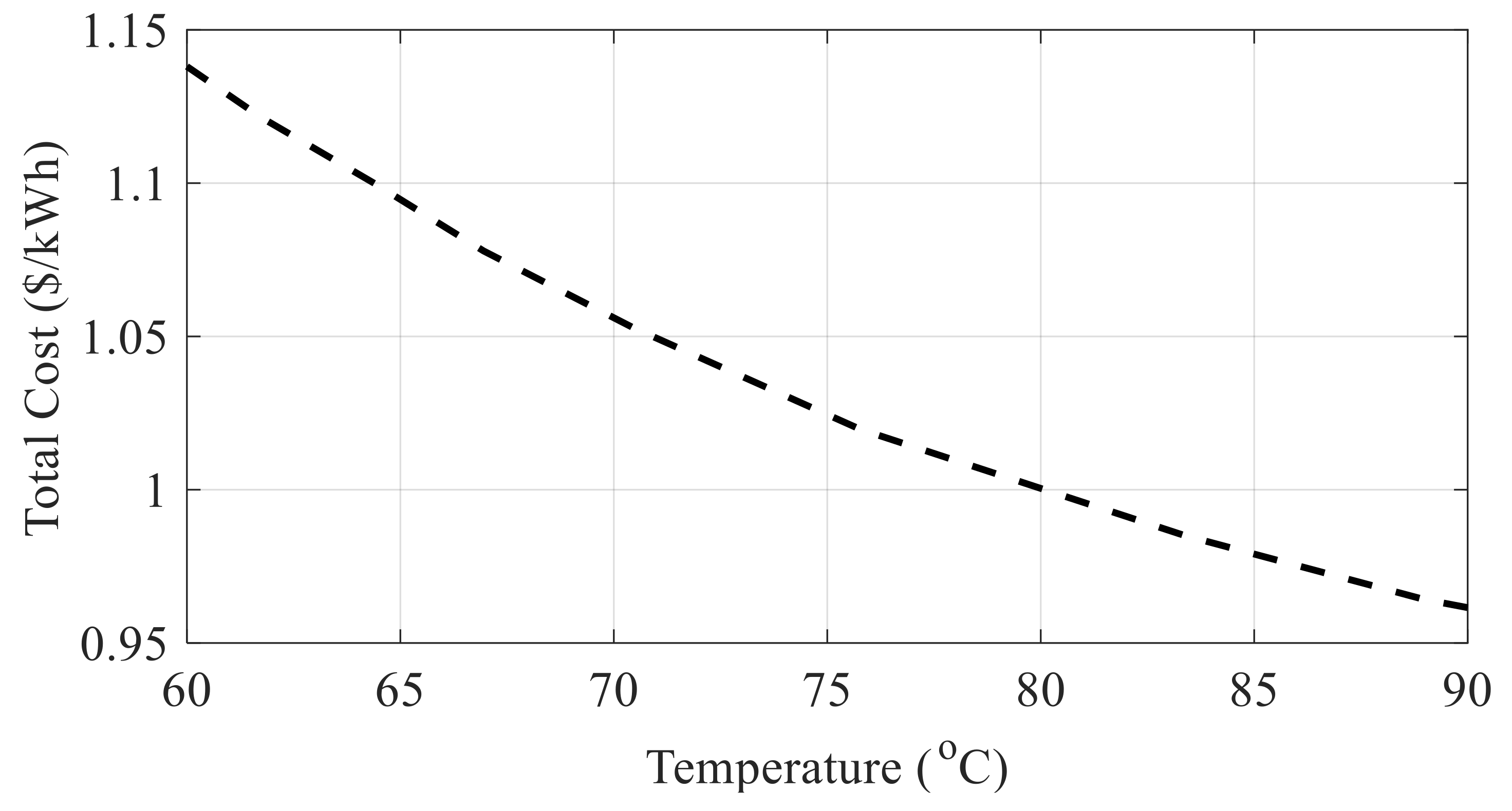
3.3. The Temperature Changes Affect the Construction Cost of the Cell
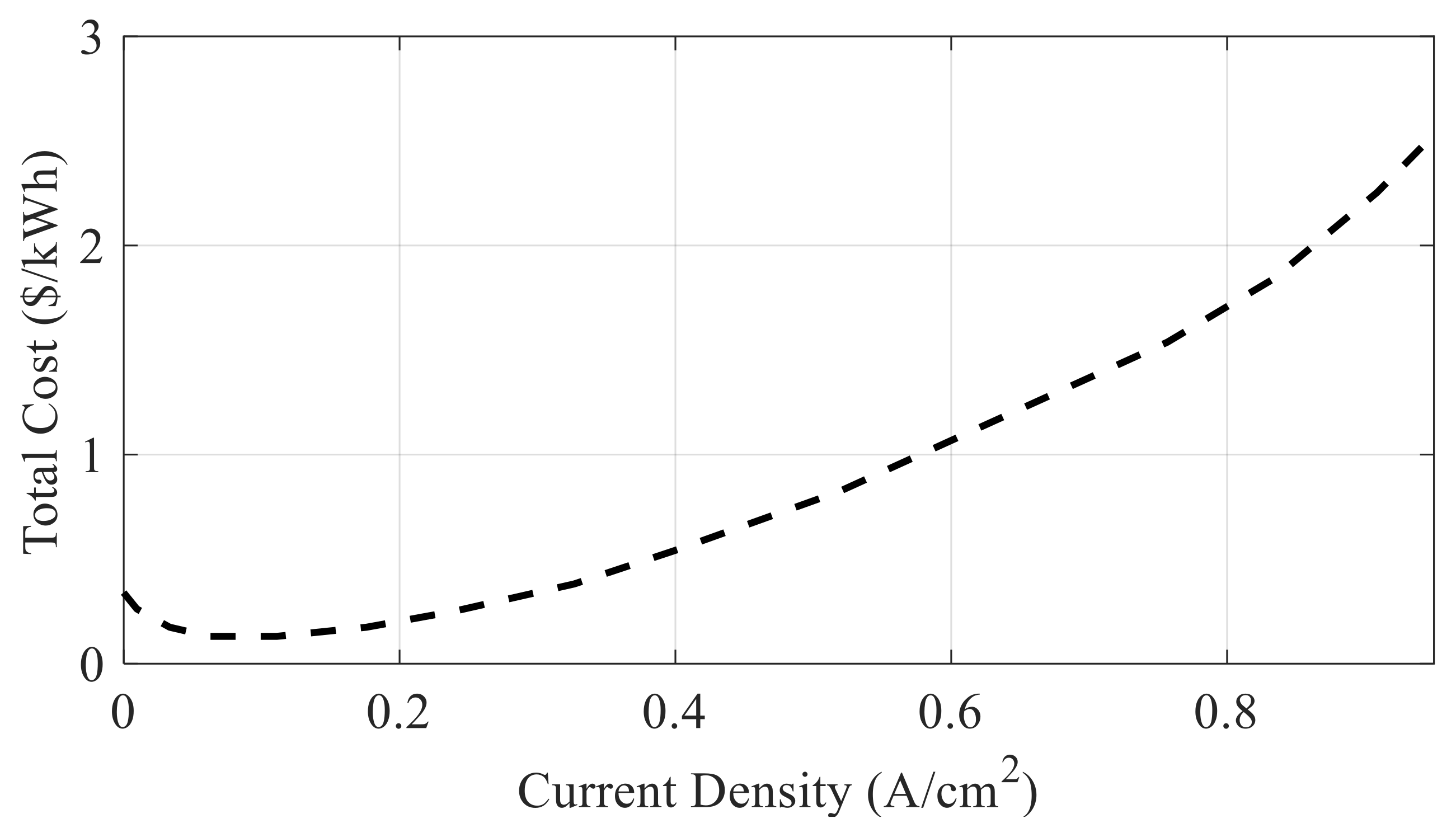
3.4. The Current Density Effect on the Construction Cost of the Cell
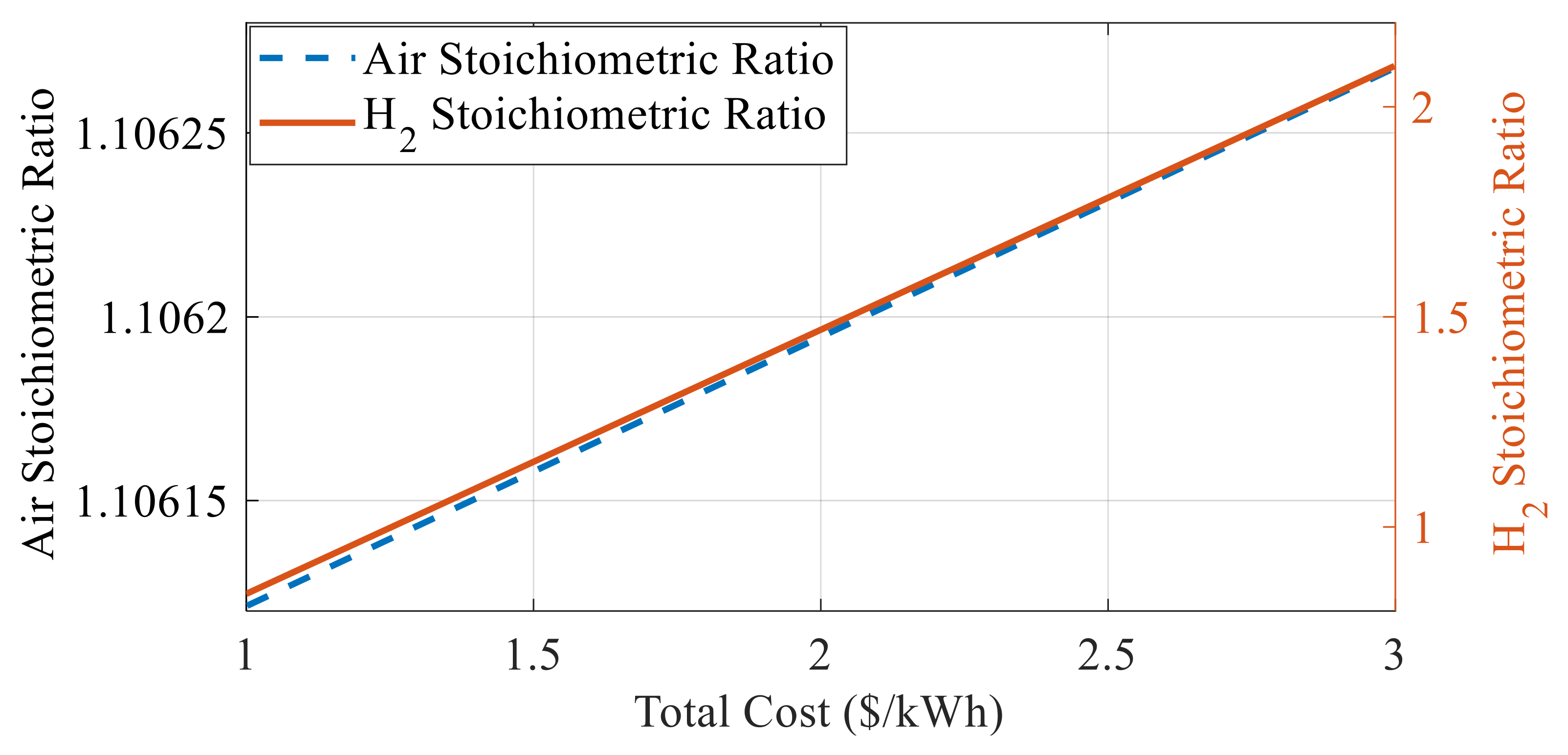
3.5. The Stoichiometric Coefficients of Hydrogen and Air Effect on the Construction Cost of the Cell
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, J.; Gao, Y.; Yin, Y.; Wang, J.; Luo, W.; Sun, G. Introduction of Proton Exchange Membrane Fuel Cell Systems. In Sliding Mode Control Methodology in the Applications of Industrial Power Systems; Springer: Cham, Switzerland, 2020; pp. 63–82. [Google Scholar]
- Nouri, A.; Khodaei, H.; Darvishan, A.; Sharifian, S.; Ghadimi, N. Optimal performance of fuel cell-CHP-battery based micro-grid under real-time energy management: An epsilon constraint method and fuzzy satisfying approach. Energy 2018, 159, 121–133. [Google Scholar] [CrossRef]
- Khodaei, H.; Hajiali, M.; Darvishan, A.; Sepehr, M.; Ghadimi, N. Fuzzy-based heat and power hub models for cost-emission operation of an industrial consumer using compromise programming. Appl. Therm. Eng. 2018, 137, 395–405. [Google Scholar] [CrossRef]
- Dehghani, M.; Ghiasi, M.; Niknam, T.; Kavousi-Fard, A.; Shasadeghi, M.; Ghadimi, N.; Taghizadeh-Hesary, F. Blockchain-based securing of data exchange in a power transmission system considering congestion management and social welfare. Sustainability 2021, 13, 90. [Google Scholar] [CrossRef]
- Mirzapour, F.; Lakzaei, M.; Varamini, G.; Teimourian, M.; Ghadimi, N. A new prediction model of battery and wind-solar output in hybrid power system. J. Ambient. Intell. Humaniz. Comput. 2017, 10, 77–87. [Google Scholar] [CrossRef]
- Ghadimi, N.; Ghadimi, R.; Danandeh, A. Applying Genetic Algorithm to Adjustment PID Coefficients in Order to Power Control of Micro-Turbine in Island Condition. Res. J. Inf. Technol. 2012, 4, 13–17. [Google Scholar]
- Bao, C.; Bessler, W.G. Two-dimensional modeling of a polymer electrolyte membrane fuel cell with long flow channel. Part II. Physics-based electrochemical impedance analysis. J. Power Sources 2015, 278, 675–682. [Google Scholar] [CrossRef] [Green Version]
- Solsona, M.; Kunusch, C.; Ocampo-Martinez, C. Control-oriented model of a membrane humidifier for fuel cell applications. Energy Convers. Manag. 2017, 137, 121–129. [Google Scholar] [CrossRef] [Green Version]
- Bernardi, D.M.; Verbrugge, M.W. A mathematical model of the solid-polymer-electrolyte fuel cell. J. Electrochem. Soc. 1992, 139, 2477–2491. [Google Scholar] [CrossRef]
- Hirano, S.; Shimpalee, S.; Lu, Z.; Satjaritanun, P.; Weidner, J.W. Investigation of PEMFC Performance and Property of the Gas Diffusion Layers Utilizing the Numerical Model. ECS Meet. Abstr. 2017, 1419. [Google Scholar] [CrossRef]
- Taleb, M.A.; Béthoux, O.; Godoy, E. Identification of a PEMFC fractional order model. Int. J. Hydrog. Energy 2017, 42, 1499–1509. [Google Scholar] [CrossRef]
- Kumar, P.A.; Geetha, M.; Chandran, K.; Sanjeevikumar, P. PEM Fuel Cell System Identification and Control. In Advances in Smart Grid and Renewable Energy; Springer: Berlin/Heidelberg, Germany, 2018; pp. 449–457. [Google Scholar]
- Duan, B.; Cao, Q.; Afshar, N. Optimal parameter identification for the proton exchange membrane fuel cell using Satin Bowerbird optimizer. Int. J. Energy Res. 2019, 43, 8623–8632. [Google Scholar] [CrossRef]
- Ariza, H.E.; Correcher, A.; Sánchez, C.; Pérez-Navarro, Á.; García, E. Thermal and electrical parameter identification of a proton exchange membrane fuel cell using genetic algorithm. Energies 2018, 11, 2099. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Ghadamyari, M.; Khorramdel, H.; Alizadeh, S.M.S.; Pirouzi, S.; Milani, M.; Banihashemi, F.; Ghadimi, N. Robust multi-objective optimal design of islanded hybrid system with renewable and diesel sources/stationary and mobile energy storage systems. Renew. Sustain. Energy Rev. 2021, 148, 111295. [Google Scholar] [CrossRef]
- Mehrpooya, M.; Ghadimi, N.; Marefati, M.; Ghorbanian, S.A. Numerical investigation of a new combined energy system includes parabolic dish solar collector, Stirling engine and thermoelectric device. Int. J. Energy Res. 2021, 45, 16436–16455. [Google Scholar] [CrossRef]
- Hamal, N.; Isa, Z.; Nayan, N.; Arshad, M.; Kajaan, N. Optimizing PEMFC Model Parameters Using Dragonfly Algorithm: A Performance Study; IEEE: Kaula Lumpur, Malaysia, 2018. [Google Scholar]
- Fathy, A.; Rezk, H. Multi-verse optimizer for identifying the optimal parameters of PEMFC model. Energy 2018, 143, 634–644. [Google Scholar] [CrossRef]
- Misaghi, M.; Yaghoobi, M. Improved Invasive weed optimization Algorithm (IWO) Based on Chaos Theory for Optimal design of PID controller. J. Comput. Des. Eng. 2019, 6, 284–295. [Google Scholar] [CrossRef]
- Brammya, G.; Praveena, S.; Preetha, N.S.N.; Ramya, R.; Rajakumar, B.R.; Binu, D. Deer Hunting Optimization Algorithm: A New Nature-Inspired Meta-heuristic Paradigm. Comput. J. 2019, bxy133. [Google Scholar] [CrossRef]
- Arora, S.; Anand, P. Chaotic grasshopper optimization algorithm for global optimization. Neural Comput. Appl. 2019, 31, 4385–4405. [Google Scholar] [CrossRef]
- Carton, J.; Olabi, A.G. Three-dimensional proton exchange membrane fuel cell model: Comparison of double channel and open pore cellular foam flow plates. Energy 2017, 136, 185–195. [Google Scholar] [CrossRef] [Green Version]
- Yuan, Z.; Wang, W.; Wang, H.; Ghadimi, N. Probabilistic decomposition-based security constrained transmission expansion planning incorporating distributed series reactor. IET Gener. Transm. Distrib. 2020, 14, 3478–3487. [Google Scholar] [CrossRef]
- Fathy, A.; Elaziz, M.A.; Alharbi, A.G. A novel approach based on hybrid vortex search algorithm and differential evolution for identifying the optimal parameters of PEM fuel cell. Renew. Energy 2020, 146, 1833–1845. [Google Scholar] [CrossRef]
- Razmjooy, N.; Khalilpour, M.; Ramezani, M. A New Meta-Heuristic Optimization Algorithm Inspired by FIFA World Cup Competitions: Theory and Its Application in PID Designing for AVR System. J. Control. Autom. Electr. Syst. 2016, 27, 419–440. [Google Scholar] [CrossRef]
- Razmjooy, N.; Ramezani, M. Improved Quantum Evolutionary Algorithm Based on Invasive Weed Optimization. Indian J. Sci. Res. 2014, 4, 413–422. [Google Scholar]
- Liu, J.; Chen, C.; Liu, Z.; Jermsittiparsert, K.; Ghadimi, N. An IGDT-based risk-involved optimal bidding strategy for hydrogen storage-based intelligent parking lot of electric vehicles. J. Energy Storage 2020, 27, 101057. [Google Scholar] [CrossRef]
- Grujicic, M.; Chittajallu, K. Design and optimization of polymer electrolyte membrane (PEM) fuel cells. Appl. Surf. Sci. 2004, 227, 56–72. [Google Scholar] [CrossRef]
- Mahmoudi, S.M.S.; Sarabchi, N.; Yari, M.; Rosen, M.A. Exergy and Exergoeconomic Analyses of a Combined Power Producing System including a Proton Exchange Membrane Fuel Cell and an Organic Rankine Cycle. Sustainability 2019, 11, 3264. [Google Scholar] [CrossRef] [Green Version]
- Tsuchiya, H.; Kobayashi, O. Mass production cost of PEM fuel cell by learning curve. Int. J. Hydrog. Energy 2004, 29, 985–990. [Google Scholar] [CrossRef]
- Ahadi, A.; Ghadimi, N.; Mirabbasi, D. Reliability assessment for components of large scale photovoltaic systems. J. Power Sources 2014, 264, 211–219. [Google Scholar] [CrossRef]
- Correa, J.; Farret, F.A.; Canha, L.; Simoes, M. An electrochemical-based fuel-cell model suitable for electrical engineering automation approach. IEEE Trans. Ind. Electron. 2004, 51, 1103–1112. [Google Scholar] [CrossRef]
- Aouali, F.; Becherif, M.; Ramadan, H.; Emziane, M.; Khellaf, A.; Mohammedi, K. Analytical modelling and experimental validation of proton exchange membrane electrolyser for hydrogen production. Int. J. Hydrogen Energy 2017, 42, 1366–1374. [Google Scholar] [CrossRef]
- Kandidayeni, M.; Macias, A.; Khalatbarisoltani, A.; Boulon, L.; Kelouwani, S. Benchmark of Proton Exchange Membrane Fuel Cell Parameters Extraction with Metaheuristic Optimization Algorithms. Energy 2019, 183, 912–925. [Google Scholar] [CrossRef]
- Tizhoosh, H.R. Opposition-based learning: A new scheme for machine intelligence. In Proceedings of the International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce (CIMCA-IAWTIC′06), Vienna, Austria, 28–30 November 2005; Volume 1, pp. 695–701. [Google Scholar]
- Na, W.; Gou, B. The efficient and economic design of PEM fuel cell systems by multi-objective optimization. J. Power Sources 2007, 166, 411–418. [Google Scholar] [CrossRef]
- Cui, Z.; Zhang, J.; Wang, Y.; Cao, Y.; Cai, X.; Zhang, W.; Chen, J. A pigeon-inspired optimization algorithm for many-objective optimization problems. Sci. China Inf. Sci. 2019, 62, 70212. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.-G.; Gao, X.-Z.; Zenger, K.; Coelho, L.D.S. A novel metaheuristic algorithm inspired by rhino herd behavior. In Proceedings of the 9th EUROSIM and the 57th SIMS, Oulu, Finland, 12–16 September 2018; Linköping University Electronic Press: Oulu, Finland; pp. 1026–1033.
- Cuevas, E.; Reyna-Orta, A.; Cortes, M.A.D. A Multimodal Optimization Algorithm Inspired by the States of Matter. Neural Process. Lett. 2017, 48, 517–556. [Google Scholar] [CrossRef]
- Kumar, M.; Kulkarni, A.; Satapathy, S.C. Socio evolution & learning optimization algorithm: A socio-inspired optimization methodology. Futur. Gener. Comput. Syst. 2018, 81, 252–272. [Google Scholar]
- Bandaghiri, P.S.; Moradi, N.; Tehrani, S.S. Optimal tuning of PID controller parameters for speed control of DC motor based on world cup optimization algorithm. Parameters 2016, 1, 106–111. [Google Scholar]
- Razmjooy, N.; Madadi, A.; Ramezani, M. Robust Control of Power System Stabilizer Using World Cup Optimization Algorithm. Int. J. Inf. Secur. Syst. Manag. 2017, 5, 519–526. [Google Scholar]
- Shahrezaee, M. Image segmentation based on world cup optimization algorithm. Majlesi J. Electr. Eng. 2017, 11. Available online: http://mjee.iaumajlesi.ac.ir/index/index.php/ee/article/view/2213 (accessed on 13 November 2021).
- Cuevas, E.; Fausto, F.; Gonzalez, A. A. A Swarm Algorithm Inspired by the Collective Animal Behavior. In New Advancements in Swarm Algorithms: Operators and Applications; Springer: Cham, Switzerland, 2020; pp. 161–188. [Google Scholar]
- Yang, D.; Li, G.; Cheng, G. On the efficiency of chaos optimization algorithms for global optimization. Chaos Solitons Fractals 2007, 34, 1366–1375. [Google Scholar] [CrossRef]
- Rim, C.; Piao, S.; Li, G.; Pak, U. A niching chaos optimization algorithm for multimodal optimization. Soft Comput. 2016, 22, 621–633. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Emperor penguin optimizer: A bio-inspired algorithm for engineering problems. Knowl.-Based Syst. 2018, 159, 20–50. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| −1.03 | 0.01 | ||
| 3.48 | 1.63 | ||
| 7.79 | 15.04 | ||
| −9.48 |
| Model | Function | Formulation | Optimum |
|---|---|---|---|
| Unimodal | Rotated High Conditioned Elliptic | 100 | |
| Rotated Bent Cigar | 200 | ||
| Rotated Discuss | 300 | ||
| Multimodal | Shifted and rotated Rosenbrock | 400 | |
| Shifted and rotated Ackley | 500 |
| GSA [48] | EPO [47] | WCO [25] | CAB [44] | CCAB | ||
|---|---|---|---|---|---|---|
| Max Min Med std | 5.26 × 107 4.72 × 106 7.95 × 106 2.25 × 107 | 7.99 × 107 6.15 × 106 1.98 × 107 2.54 × 107 | 3.23 × 106 3.26 × 105 1.27 × 106 6.12 × 105 | 1.06 × 106 1.17 × 105 5.33 × 105 3.48 × 105 | 7.42 × 105 5.31 × 104 3.41 × 105 1.62 × 105 | |
| Max Min Med std | 2.70 × 104 2.64 × 103 8.38 × 103 3.14 × 103 | 7.87 × 106 1.39 × 106 4.07 × 106 1.74 × 106 | 3.68 × 104 5.79 × 103 1.77 × 104 9.19 × 103 | 2.86 × 103 2.65 × 102 4.72 × 102 2.42 × 102 | 1.58 × 103 2.64 × 102 2.38 × 102 2.47 × 102 | |
| Max Min Med std | 7.61 × 104 1.97 × 104 5.22 × 104 9.13 × 103 | 4.97 × 104 6.38 × 102 8.25 × 103 1.70 × 104 | 1.66 × 104 3.61 × 103 7.81 × 103 3.47 × 103 | 1.94 × 103 4.73 × 102 2.11 × 102 3.53 × 102 | 1.35 × 103 2.83 × 102 3.57 × 102 1.48 × 102 | |
| Max Min Med std | 7.90 × 102 6.18 × 102 7.43 × 102 4.82 × 101 | 5.88 × 102 3.81 × 102 6.20 × 102 4.02 × 102 | 5.15 × 102 3.53 × 102 4.98 × 102 3.13 × 101 | 3.49 × 102 3.24 × 102 4.68 × 102 3.76 × 101 | 1.85 × 102 2.23 × 102 2.14 × 102 3.19 × 101 | |
| Max Min Med std | 5.19 × 102 5.19 × 102 5.18 × 102 4.77 × 10−3 | 5.21 × 102 5.21 × 102 5.21 × 102 3.86 × 10−4 | 5.19 × 102 5.19 × 102 5.19 × 102 4.18 × 10−3 | 5.20 × 102 5.19 × 102 5.19 × 102 3.86 × 10−4 | 5.18 × 102 5.19 × 102 5.19 × 102 7.72 × 10−5 |
| Algorithm | Parameter | ||||
|---|---|---|---|---|---|
| CCAB | 1.42 | 1.25 | 0.47 | 75.2 | 0.61 |
| CAB | 1.37 | 1.18 | 0.40 | 73.6 | 0.58 |
| GA | 1.10 | 1.20 | 0.32 | 72.4 | 0.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahdinia, S.; Rezaie, M.; Elveny, M.; Ghadimi, N.; Razmjooy, N. Optimization of PEMFC Model Parameters Using Meta-Heuristics. Sustainability 2021, 13, 12771. https://doi.org/10.3390/su132212771
Mahdinia S, Rezaie M, Elveny M, Ghadimi N, Razmjooy N. Optimization of PEMFC Model Parameters Using Meta-Heuristics. Sustainability. 2021; 13(22):12771. https://doi.org/10.3390/su132212771
Chicago/Turabian StyleMahdinia, Saeideh, Mehrdad Rezaie, Marischa Elveny, Noradin Ghadimi, and Navid Razmjooy. 2021. "Optimization of PEMFC Model Parameters Using Meta-Heuristics" Sustainability 13, no. 22: 12771. https://doi.org/10.3390/su132212771