
Adaptive Nonsingular Fast Terminal Sliding Mode Control for Maximum Power Point Tracking of a WECS-PMSG



Abstract
:1. Introduction
- 1
- Utilization of a Lyapunov-based adaptation approach for the estimation of the unknown upper bounds of the system uncertainties;
- 2
- Elimination of any unwanted singularities in WECS-PMSGs while extracting the maximum energy;
- 3
- Accomplishment of faster convergence using the proposed strategy over other strategies when the system states are far away from the origin;
- 4
- Validation of the efficacy of ANFTSMC based on the obtained comparative results.
2. Modeling of the WECS-PMSG
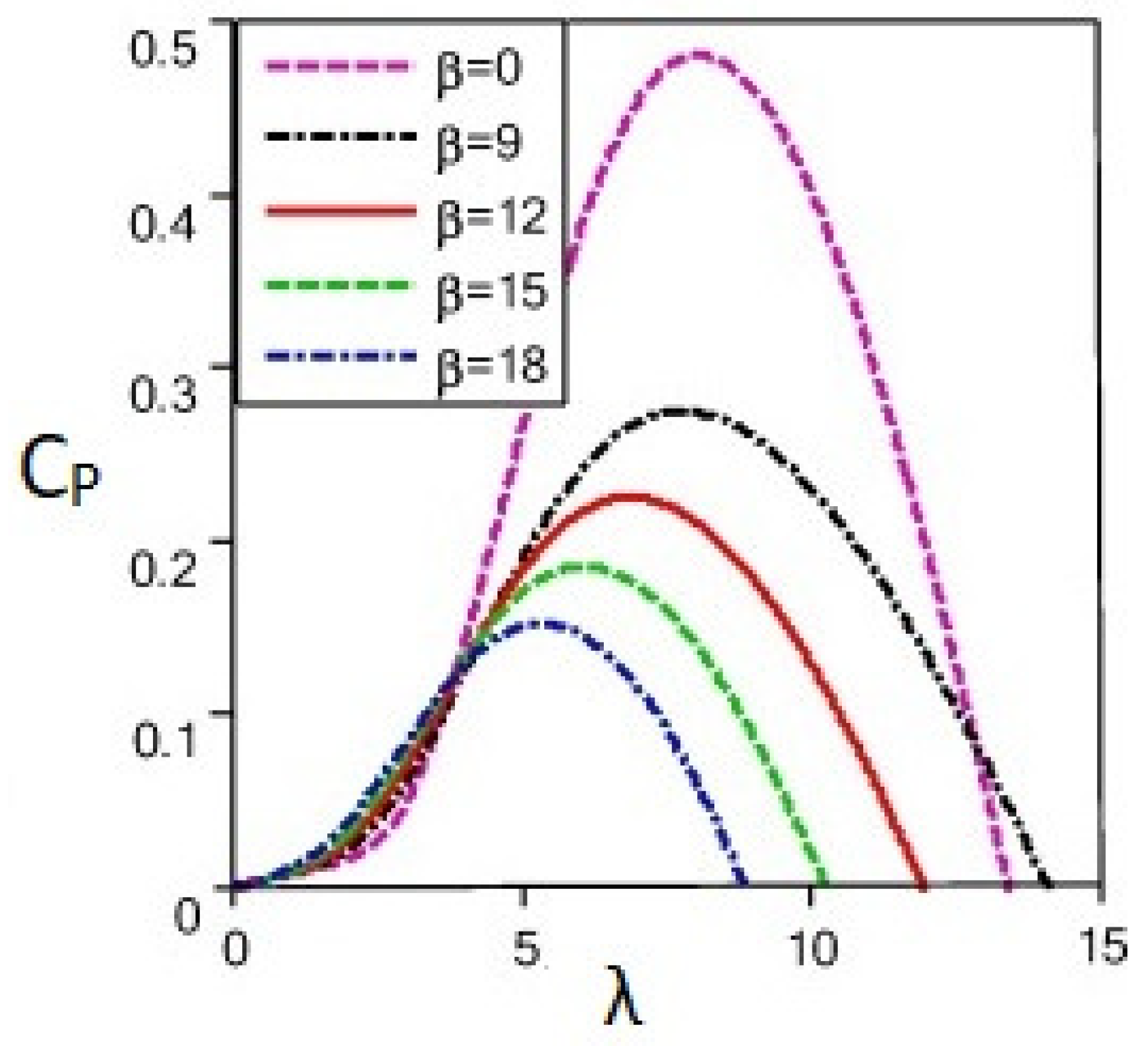
2.1. Aerodynamic Model
2.2. PMSG Model
2.3. Shaft System Model
2.4. Overall Model
3. Control of WECS-PMSG
3.1. Design of NFTSMC
3.1.1. Design of the NFTSMC for the Rotor Speed
3.1.2. Design of the NFTSMC for the D-Component of the Stator Current
3.2. Design of ANFTSMC
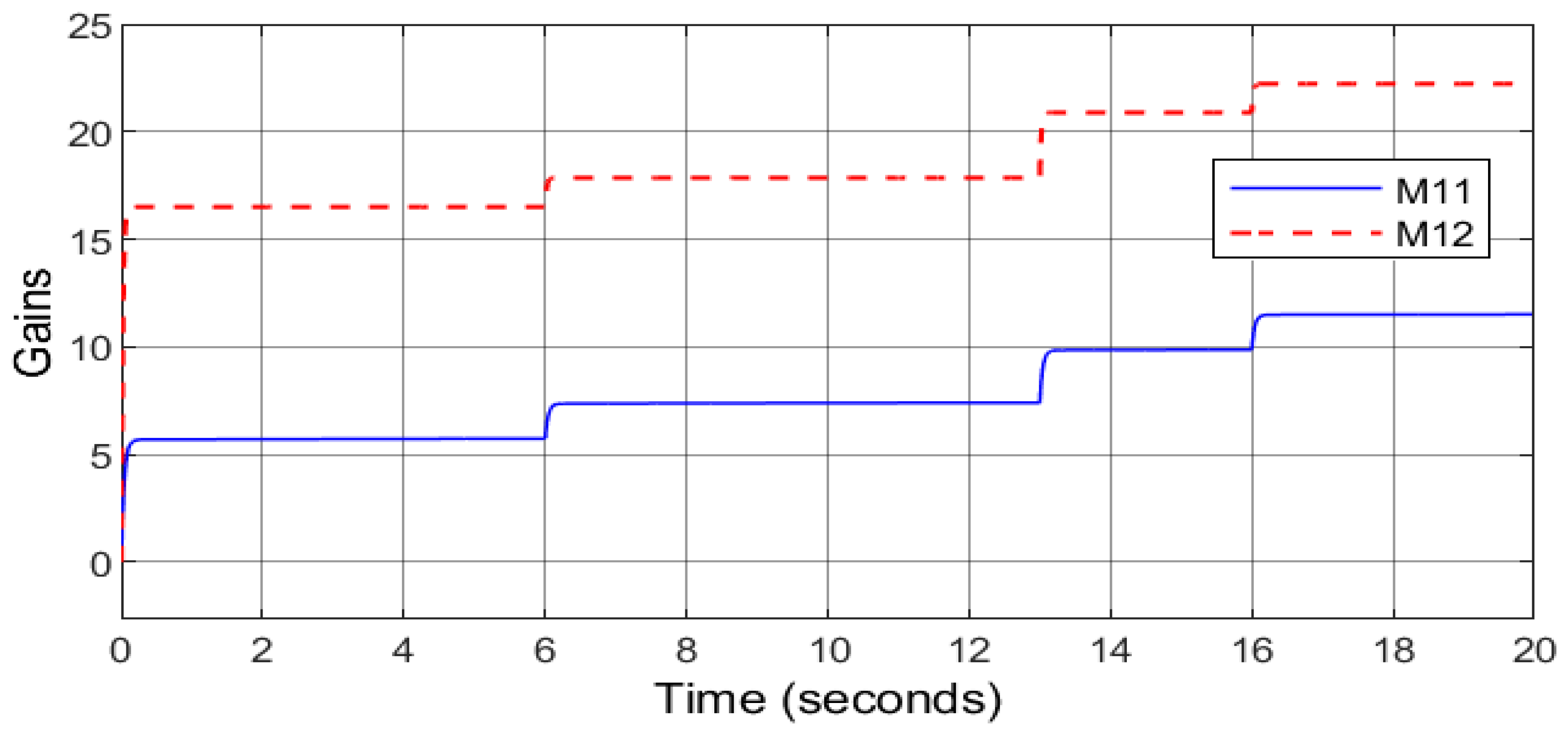
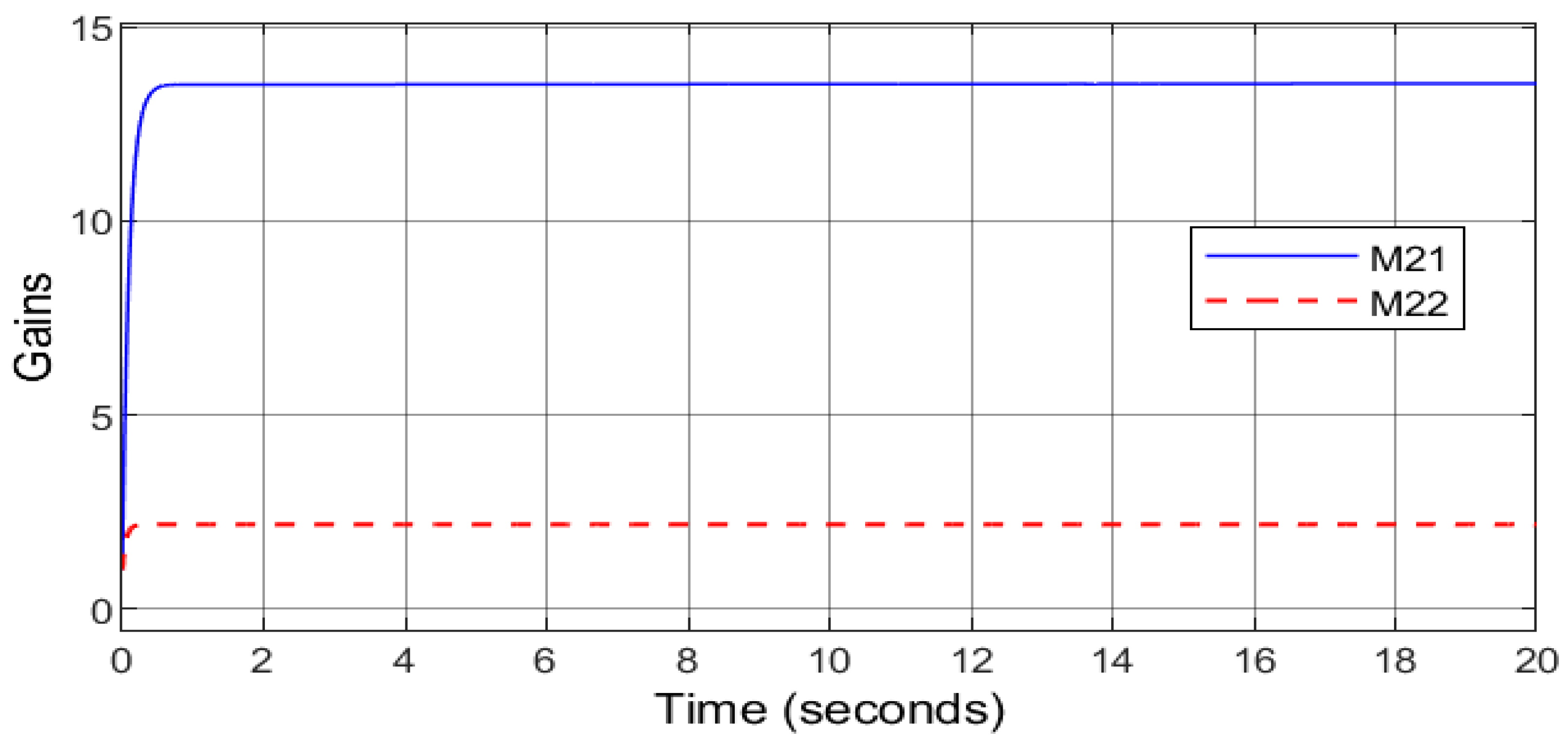
3.2.1. Design of the ANFTSMC for the Rotor Speed
3.2.2. Design of the ANFTSMC for the D-Component of the Stator Current
4. Simulation Results and Discussions
4.1. Step Change of the Wind Speed
4.2. Random Variation of the Wind Speed
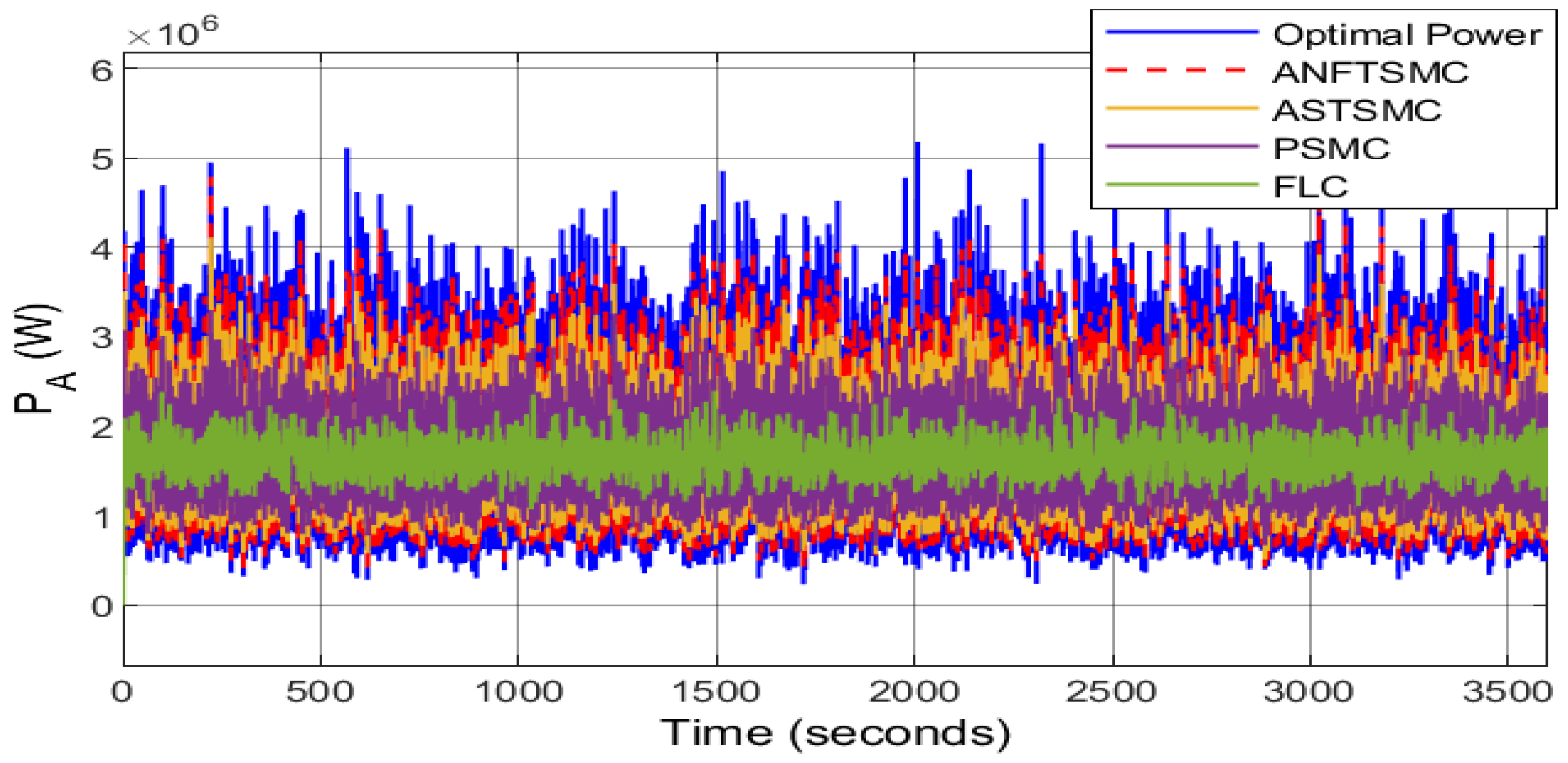
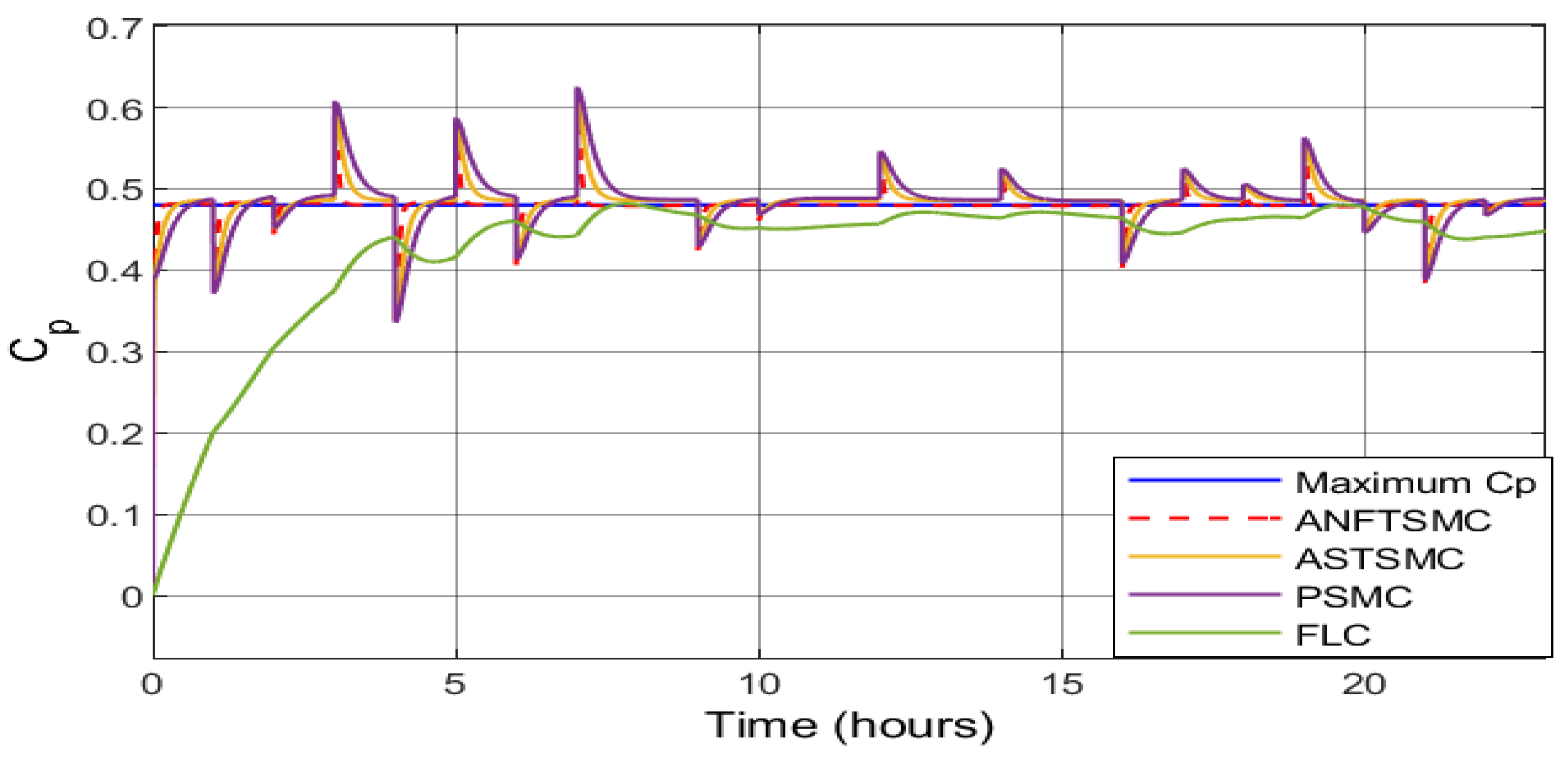
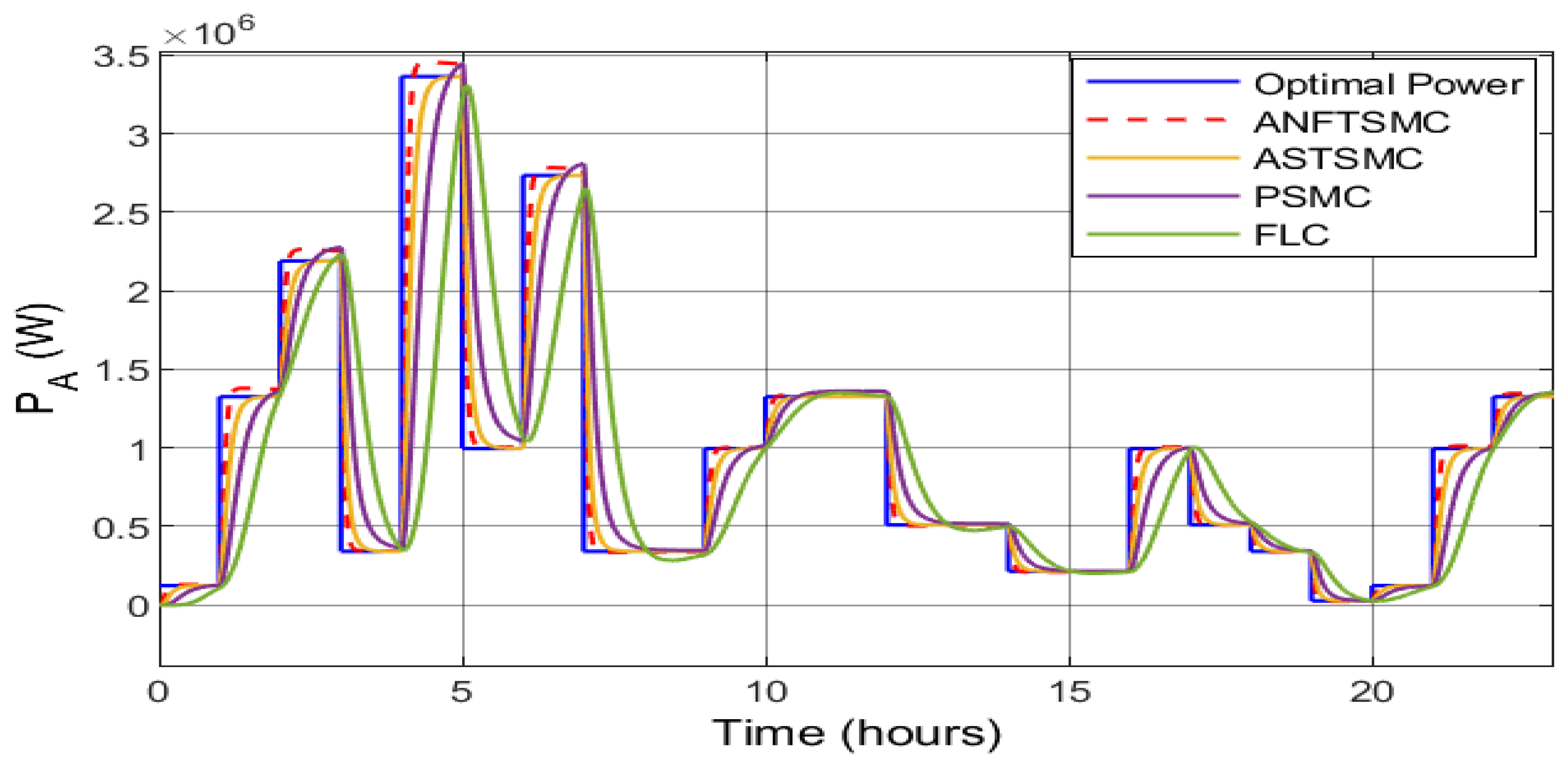
4.3. Long-Term Random Variation of the Wind Speed
4.4. Historical Wind Speed Profile
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mínaz, M.R.; Akcan, E. An Effective Method for Detection of Demagnetization Fault in Axial Flux Coreless PMSG with Texture-Based Analysis. IEEE Access 2021, 9, 17438–17449. [Google Scholar] [CrossRef]
- Maaruf, M.; Khan, K.A.; Khalid, M. Integrated Power Management and Nonlinear-Control for Hybrid Renewable Microgrid. In Proceedings of the 2021 IEEE Green Technologies Conference (GreenTech), Denver, CO, USA, 7–11 April 2021; pp. 176–180. [Google Scholar] [CrossRef]
- Kaldellis, J.; Apostolou, D. Life cycle energy and carbon footprint of offshore wind energy. Comparison with onshore counterpart. Renew. Energy 2017, 108, 72–84. [Google Scholar] [CrossRef]
- Ahmed, S.D.; Al-Ismail, F.S.; Shafiullah, M.; Al-Sulaiman, F.A.; El-Amin, I.M. Grid integration challenges of wind energy: A review. IEEE Access 2020, 8, 10857–10878. [Google Scholar] [CrossRef]
- Feng, S.; Wang, K.; Lei, J.; Tang, Y. Influences of DC bus voltage dynamics in modulation algorithm on power oscillations in PMSG-based wind farms. Int. J. Electr. Power Energy Syst. 2021, 124, 106387. [Google Scholar] [CrossRef]
- Shanmugam, L.; Joo, Y.H. Stabilization of permanent magnet synchronous generator-based wind turbine system via fuzzy-based sampled-data control approach. Inf. Sci. 2021, 559, 270–285. [Google Scholar] [CrossRef]
- Zribi, M.; Alrifai, M.; Rayan, M. Sliding Mode Control of a Variable- Speed Wind Energy Conversion System Using a Squirrel Cage Induction Generator. Energies 2017, 10, 604. [Google Scholar] [CrossRef] [Green Version]
- Tripathi, S.; Tiwari, A.; Singh, D. Grid-integrated permanent magnet synchronous generator based wind energy conversion systems: A technology review. Renew. Sustain. Energy Rev. 2015, 51, 1288–1305. [Google Scholar] [CrossRef]
- Bonfiglio, A.; Delfino, F.; Gonzalez-Longatt, F.; Procopio, R. Steady-state assessments of PMSGs in wind generating units. Int. J. Electr. Power Energy Syst. 2017, 90, 87–93. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Yu, T.; Shu, H.; Zhang, X.; Qu, K.; Jiang, L. Democratic joint operations algorithm for optimal power extraction of PMSG based wind energy conversion system. Energy Convers. Manag. 2018, 159, 312–326. [Google Scholar] [CrossRef]
- Abd El Hamied, M.A.; Amary, N.H.E. Permanent Magnet Synchronous Generator Stability Analysis and Control. Procedia Comput. Sci. 2016, 95, 507–515. [Google Scholar] [CrossRef] [Green Version]
- Zarei, M.E.; Ramirez, D.; Prodanovic, M.; Medrano Arana, G. Model Predictive Control for PMSG-based Wind Turbines with Overmodulation and Adjustable Dynamic Response Time. IEEE Trans. Ind. Electron. 2021, 69, 1573–1585. [Google Scholar] [CrossRef]
- Maaruf, M.; Ferik, S.E.; Mahmoud, M.S. Integral Sliding Mode Control With Power Exponential Reaching Law for DFIG. In Proceedings of the 2020 17th International Multi-Conference on Systems, Signals Devices (SSD), Monastir, Tunisia, 20–23 July 2020; pp. 1122–1127. [Google Scholar] [CrossRef]
- Rhaili, S.; Abbou, A.; Ziouh, A.; Elidrissi, R. Comparative study between PI and FUZZY logic controller in vector controlled five-phase PMSG based variable-speed wind turbine. In Proceedings of the 2018 IEEE 12th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2018), Doha, Qatar, 10–12 April 2018; pp. 1–6. [Google Scholar]
- Giraldo, E.; Garces, A. An Adaptive Control Strategy for a Wind Energy Conversion System Based on PWM-CSC and PMSG. IEEE Trans. Power Syst. 2014, 29, 1446–1453. [Google Scholar] [CrossRef]
- Shafiullah, M.; Abido, M.A.; Coelho, L.S. Design of robust PSS in multimachine power systems using backtracking search algorithm. In Proceedings of the 2015 18th International Conference on Intelligent System Application to Power Systems (ISAP), Porto, Portugal, 11–16 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–6. [Google Scholar]
- Saad, N.H.; El-Sattar, A.A.; Marei, M.E. Improved bacterial foraging optimization for grid connected wind energy conversion system based PMSG with matrix converter. Ain Shams Eng. J. 2018, 9, 2183–2193. [Google Scholar] [CrossRef]
- Alam, M.S.; Shafiullah, M.; Hossain, M.I.; Hasan, M.N. Enhancement of power system damping employing TCSC with genetic algorithm based controller design. In Proceedings of the 2015 International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), Savar, Bangladesh, 21–23 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Haridy, A.L.; Abdelbasset, A.A.M.; Hemeida, M. Optimum Controller Design Using the Ant Lion Optimizer for PMSG Driven by Wind Energy. J. Electr. Eng. Technol. 2021, 16, 367–380. [Google Scholar] [CrossRef]
- Shafiullah, M.; Rana, M.J.; Coelho, L.S.; Abido, M.A. Power system stability enhancement by designing optimal PSS employing backtracking search algorithm. In Proceedings of the 2017 6th International Conference on Clean Electrical Power (ICCEP), Santa Margherita Ligure, Italy, 27–29 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 712–719. [Google Scholar]
- Shafiullah, M.; Rana, M.J.; Shahriar, M.S.; Zahir, M.H. Low-frequency oscillation damping in the electric network through the optimal design of UPFC coordinated PSS employing MGGP. Measurement 2019, 138, 118–131. [Google Scholar]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S.; Elgendy, M.A. Output Power Smoothing of Grid-Tied PMSG-Based Variable Speed Wind Turbine Using Optimal Controlled SMES. In Proceedings of the 2019 54th International Universities Power Engineering Conference (UPEC), Bucharest, Romania, 3–6 September 2019; pp. 1–6. [Google Scholar]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. A novel LMSRE-based adaptive PI control scheme for grid-integrated PMSG-based variable-speed wind turbine. Int. J. Electr. Power Energy Syst. 2021, 125, 106505. [Google Scholar] [CrossRef]
- Shafiullah, M.; Rana, M.J.; Shahriar, M.S.; Al-Sulaiman, F.A.; Ahmed, S.D.; Ali, A. Extreme learning machine for real-time damping of LFO in power system networks. Electr. Eng. 2021, 103, 279–292. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Maaruf, M.; El-Ferik, S. Neuro-adaptive output feedback control of the continuous polymerization reactor subjected to parametric uncertainties and external disturbances. ISA Trans. 2021, 112, 1–11. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Roy, T.K.; Littras, K.; Islam, S.N.; Amanullah Oo, M.T. Nonlinear Partial Feedback Linearizing Controller Design for PMSG-Based Wind Farms to Enhance LVRT Capabilities. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 18–21 December 2018; pp. 1–6. [Google Scholar]
- Soufi, Y.; Kahla, S.; Bechouat, M. Feedback linearization control based particle swarm optimization for maximum power point tracking of wind turbine equipped by PMSG connected to the grid. Int. J. Hydrogen Energy 2016, 41, 20950–20955. [Google Scholar] [CrossRef]
- El Mourabit, Y.; Derouich, A.; El Ghzizal, A.; El Ouanjli, N.; Zamzoum, O. Nonlinear backstepping control for PMSG wind turbine used on the real wind profile of the Dakhla-Morocco city. Int. Trans. Electr. Energy Syst. 2020, 30, e12297. [Google Scholar] [CrossRef]
- Saidi, Y.; Mezouar, A.; Miloud, Y.; Kerrouche, K.D.E.; Brahmi, B.; Benmahdjoub, M.A. Advanced non-linear backstepping control design for variable speed wind turbine power maximization based on tip-speed-ratio approach during partial load operation. Int. J. Dynam. Control 2020, 30, e12297. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.; Zhang, Y.; Chen, J.; Sang, Y.; Jiang, L. Passivity-based sliding-mode control design for optimal power extraction of a PMSG based variable speed wind turbine. Renew. Energy 2018, 119, 577–589. [Google Scholar] [CrossRef]
- Xiong, L.; Li, P.; Ma, M.; Wang, Z.; Wang, J. Output power quality enhancement of PMSG with fractional order sliding mode control. Int. J. Electr. Power Energy Syst. 2020, 115, 105402. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Ullah, N.; Ro, J.S. Sensorless fractional order composite sliding mode control design for wind generation system. ISA Trans. 2021, 111, 275–289. [Google Scholar] [CrossRef]
- Dursun, E.H.; Kulaksiz, A.A. Second-order sliding mode voltage-regulator for improving MPPT efficiency of PMSG-based WECS. Int. J. Electr. Power Energy Syst. 2020, 121, 106149. [Google Scholar] [CrossRef]
- Nasiri, M.; Mobayen, S.; Zhu, Q.M. Super-Twisting Sliding Mode Control for Gearless PMSG-Based Wind Turbine. Complexity 2019, 2019, 6141607. [Google Scholar] [CrossRef]
- Yazıcı, İ.; Yaylacı, E.K. Discrete-time integral terminal sliding mode based maximum power point controller for the PMSG-based wind energy system. IET Power Electron. 2019, 12, 3688–3696. [Google Scholar] [CrossRef]
- Dursun, E.H.; Kulaksiz, A.A. Second-Order Fast Terminal Sliding Mode Control for MPPT of PMSG-based Wind Energy Conversion System. Elektron. Elektrotechnika 2020, 26, 39–45. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Ali, Z.; Ullah, N.; Ro, J.S. A Super Twisting Fractional Order Terminal Sliding Mode Control for DFIG-Based Wind Energy Conversion System. Energies 2020, 13, 2158. [Google Scholar] [CrossRef]
- Kord, H.; Barakati, S.M. Design an adaptive sliding mode controller for an advanced hybrid energy storage system in a wind dominated RAPS system based on PMSG. Sustain. Energy Grids Netw. 2020, 21, 100310. [Google Scholar] [CrossRef]
- Tang, Y.; Zhang, Y.; Hasankhani, A.; VanZwieten, J. Adaptive Super-Twisting Sliding Mode Control for Ocean Current Turbine-Driven Permanent Magnet Synchronous Generator. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 211–217. [Google Scholar]
- Sun, K.; Li, D.; Zheng, B. Adaptive Global Fast Terminal Sliding Mode Control for MPPT of Direct-driven PMSG. In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 1658–1663. [Google Scholar]
- Wang, J.; Bo, D.; Ma, X.; Zhang, Y.; Li, Z.; Miao, Q. Adaptive backstepping control for a permanent magnet synchronous generator wind energy conversion system. Int. J. Hydrogen Energy 2019, 44, 3240–3249. [Google Scholar] [CrossRef]
- Wang, J.; Bo, D. Adaptive fixed-time sensorless maximum power point tracking control scheme for DFIG wind energy conversion system. Int. J. Electr. Power Energy Syst. 2022, 135, 107424, in press. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Maaruf, M. Robust Adaptive Multilevel Control of a Quadrotor. IEEE Access 2020, 8, 167684–167692. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2011, 21, 1865–1879. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive backstepping fast terminal sliding mode controller for uncertain quadrotor UAV. Aerosp. Sci. Technol. 2019, 93, 105306. [Google Scholar] [CrossRef]
- Beniaguev, D. Historical Hourly Weather Data 2012–2017. Available online: https://www.kaggle.com/selfishgene/historical-hourly-weather-data (accessed on 31 October 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| , | 3/2, 3 |
| , , , | 1, 1, 1, 1 |
| , , , | 1, 0.04, 10, 15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maaruf, M.; Shafiullah, M.; Al-Awami, A.T.; Al-Ismail, F.S. Adaptive Nonsingular Fast Terminal Sliding Mode Control for Maximum Power Point Tracking of a WECS-PMSG. Sustainability 2021, 13, 13427. https://doi.org/10.3390/su132313427
Maaruf M, Shafiullah M, Al-Awami AT, Al-Ismail FS. Adaptive Nonsingular Fast Terminal Sliding Mode Control for Maximum Power Point Tracking of a WECS-PMSG. Sustainability. 2021; 13(23):13427. https://doi.org/10.3390/su132313427
Chicago/Turabian StyleMaaruf, Muhammad, Md Shafiullah, Ali T. Al-Awami, and Fahad S. Al-Ismail. 2021. "Adaptive Nonsingular Fast Terminal Sliding Mode Control for Maximum Power Point Tracking of a WECS-PMSG" Sustainability 13, no. 23: 13427. https://doi.org/10.3390/su132313427