Solving the Real Power Limitations in the Dynamic Economic Dispatch of Large-Scale Thermal Power Units under the Effects of Valve-Point Loading and Ramp-Rate Limitations


Abstract
:1. Introduction
- (1)
- Few NTOTs are used for the DED of large-scale TPUs, e.g., 1000 TPUs, that consider the effects of VPL with RRLs. The current study covers the lack in this field.
- (2)
- A novel algorithm, namely, a multi-gradient particle swarm optimization (MG-PSO) algorithm, is applied an optimization tool to solve the DED of 10 TPUs without/with transmission network loss; 100, 500 and, 1000 TPUs under VPL effects; and RRLs’ real power limitations.
- (3)
- The power generating scheduling of online TPUs is updated every 1 h for the duration of a day in a real-time operation to meet the load demands and real power limitations.
- (4)
- The generation is estimated to meet the load demand at any time during the period of a day. This procedure can maintain PGS stability and forecast the periodic maintenance schedule of the TPUs subjected to a massive change in their generation during the period of a day.
- (5)
- The research study provides details about the generation volume of each TPU over a 24 h period and which one is subjected to considerable changes during this period.
- (6)
- Most NTOTs in the literature often suffer from premature convergence and dimensionality when applied to a large-scale DED of real power (more than 500 TPUs) with many local minima due to the effects of VPL and RRLs. However, the MG-PSO algorithm was positively applied to alleviate particles’ convergence stagnancy even with 1000 TPUs throughout the solution’s inspections.
- (7)
- The approach used in the current research study is different from that adopted in our previous study [62,63]. In [62,63], the MG-PSO algorithm was used to solve the static ED for 1 h only of small and medium power systems, i.e., 6, 13, and 15 TPUs, under several power constraints, such as prohibited operating zones, RRLs, and VPL effects. However, in this study, the MG-PSO algorithm is used to solve the DED of large-scale TPUs, i.e., 100, 500, and 1000 TPUs, under the effects of VPL with RRLs during the 24 h period. It is a more complicated multi-objective function.
- (8)
- The GPSO-w algorithm is improved by using different negative gradient variations to prevent the best particle inside a swarm from falling in the local minimum and ensuring its escape.
- (9)
- With widespread simulated tests for the DED of medium-scale and large-scale TPU PGSs, the MG-PSO algorithm’s superiority over various competitive NTOTs, including the GPSO-w algorithm, in terms of performance measures has been demonstrated based on various numerous performance measures, such as fitness values, convergence rate, and consistency.
- (10)
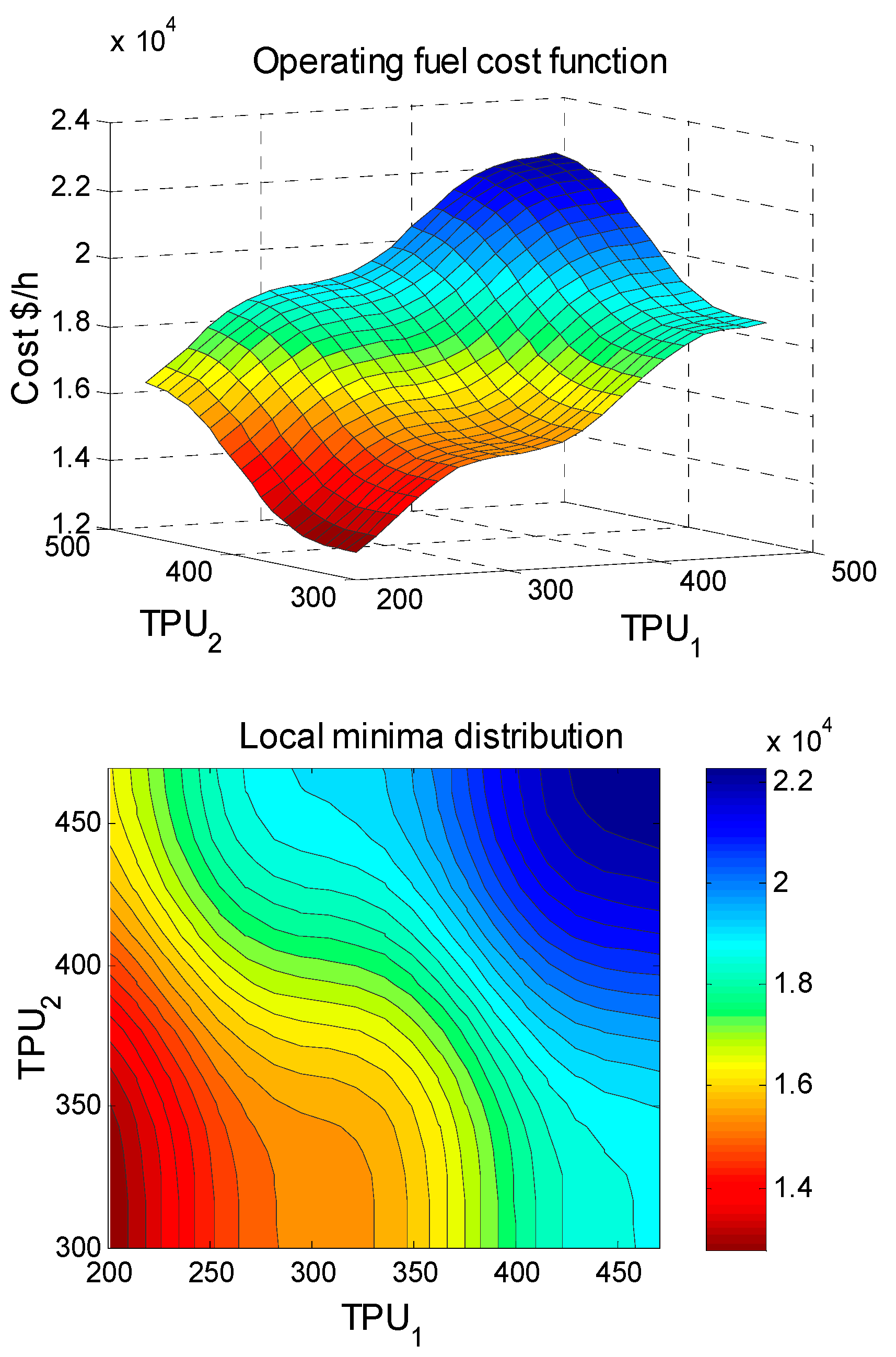
- An illustrative example demonstrating the effects of VPL and RRLs on the OFC of two TPUs for 1 h is shown in Section 4.3.
- (11)
- This investigation provides useful technical references for economic dispatch operators to update their PGS programs to achieve economic benefits.
2. Mathematical Formation of the DED of Real Power
3. GPSO-w Algorithm
- (1)
- Every particle moving in the search space adapts its moving path based on two guides, namely, , its own experience, and , the best particle experience among the M particles.
- (2)
- M particles look for a solution, that is, global optimum; every particle gains the information from its and . Thus, a particle employs the best experience among the M particles while selecting the as its neighbor’s best experience.
- (3)
- GPSO-w is denoted as global PSO algorithm; the position of each particle is influenced by the particle in the whole population inside a swarm.
| Algorithm 1. Pseudocode of the global particle swarm optimization with the inertia weight (w) (GPSO-w) algorithm learning strategy |
|
| End |
4. MG-PSO Algorithm
4.1. MG-PSO Algorithm Learning Strategy
4.2. MG-PSO Algorithm Structure
| Algorithm 2. Pseudocode of the natural learning mechanism of the multi-gradient particle swarm optimization (MG-PSO) algorithm |
| Let f(x) be the objective function to be minimized Select Determine and using Equations (19) and (20), respectively Initialization: Iteration, t = 0 Obtain using Equations (10)–(13) Begin exploration stage for (begin of episode k) Determine using Equation (22) for Determine using Equation (25) for Update the particle’s velocity and position vectors as follows: Update as follows: end i loop Obtain as follows: end t loop Obtain and end k loop (end of episode k) for Obtain end k loop Obtain new search space (neighborhood) by taking and of each element of End exploration stage Begin exploitation stage Use the new search space Initialization: Iteration, t = 1 for Update for Determine using Equation (24) for Update the particle’s velocity and position vectors as follows: Update as follows: end i loop Obtain as follows: end t loop Optimum solution = Optimum value = End exploitation stage End MG-PSO algorithm |
4.3. Illustrative Example
5. Case Studies and Simulation Results
- (1)
- Case study #1: 10-TPU PGS without/with consideration of . This case study has 240 (24 × 10) decision variables.
- (2)
- Case study #2: 100-TPU PGS by repeating the PGS of case study #1 10 times. This case study has 2400 (24 × 100) decision variables.
- (3)
- Case study #3: 500-TPU PGS by repeating the PGS of case study #1 50 times. This case study has 12,000 (24 × 500) decision variables.
- (4)
- Case study #4: 1000-TPU PGS by repeating the PGS of case study #1 500 times. This case study has 24,000 (24 × 1000) decision variables.
5.1. Performance and Fitness Measures
- (1)
- Every NTOT is employed with independent runs;
- (2)
- Every NTOT is employed with iterations;
- (3)
- The values in USD were determined by Equation (1) under its real power limitations Equations (4) to (9) over independent runs at every t iteration;
- (4)
- is the values in USD over independent runs;
- (5)
- is the values in USD over independent runs;
- (6)
- is the values in USD over independent runs;
- (7)
- is the values in USD over independent runs;
- (8)
- The is determined by the overall time implemented by the NTOT after a convergence over independent runs.
5.2. Case Study #1: 10-TPU PGS without/with Consideration of Transmission Network Loss
5.3. Case Studies #2 to #4: 100-, 500-, and 1000-TPU PGS
5.4. MG-PSO Algorithm with Several Fitness Measures
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Gong, D.-W.; Geng, N.; Sun, X.-Y. Hybrid bare-bones PSO for dynamic economic dispatch with valve-point effects. Appl. Soft Comput. 2014, 18, 248–260. [Google Scholar] [CrossRef]
- Lokeshgupta, B.; Sivasubramani, S. Multi-objective dynamic economic and emission dispatch with demand side management. Int. J. Electr. Power Energy Syst. 2018, 97, 334–343. [Google Scholar] [CrossRef]
- Roy, S. The maximum likelihood optima for an economic load dispatch in presence of demand and generation variability. Energy 2018, 147, 915–923. [Google Scholar] [CrossRef]
- Mason, K.; Duggan, J.; Howley, E. A multi-objective neural network trained with differential evolution for dynamic economic emission dispatch. Int. J. Electr. Power Energy Syst. 2018, 100, 201–221. [Google Scholar] [CrossRef]
- Ciornei, I.; Kyriakides, E. Recent methodologies and approaches for the economic dispatch of generation in power systems. Int. Trans. Electr. Energy Syst. 2012, 23, 1002–1027. [Google Scholar] [CrossRef]
- Niknam, T.; Mojarrad, H.D.; Meymand, H.Z. A new particle swarm optimization for non-convex economic dispatch. Eur. Trans. Electr. Power 2010, 21, 656–679. [Google Scholar] [CrossRef]
- Alomoush, M.I.; Oweis, Z.B. Environmental-economic dispatch using stochastic fractal search algorithm. Int. Trans. Electr. Energy Syst. 2018, 28, e2530. [Google Scholar] [CrossRef]
- Yu, X.; Xianrui, Y.X.; Lu, Y. Economic and emission dispatch using ensemble multi-objective differential evolution algorithm. Sustainability 2018, 10, 418. [Google Scholar] [CrossRef] [Green Version]
- Coelho, L.D.S.; Mariani, V. Correction to “Combining of Chaotic Differential Evolution and Quadratic Programming for Economic Dispatch Optimization with Valve-Point Effect”. IEEE Trans. Power Syst. 2006, 21, 989–996. [Google Scholar]
- Hemamalini, S.; Simon, S. Dynamic economic dispatch using artificial bee colony algorithm for units with valve-point effect. Eur. Trans. Electr. Power 2011, 21, 70–81. [Google Scholar] [CrossRef]
- Vo, D.N.; Schegner, P.; Ongsakul, W. Cuckoo search algorithm for non-convex economic dispatch. IET Gener. Transm. Distrib. 2013, 7, 645–654. [Google Scholar] [CrossRef]
- Singh, D.; Dhillon, J. Ameliorated grey wolf optimization for economic load dispatch problem. Energy 2019, 169, 398–419. [Google Scholar] [CrossRef]
- Singh, P.; Dwivedi, P. A novel hybrid model based on neural network and multi-objective optimization for effective load forecast. Energy 2019, 182, 606–622. [Google Scholar] [CrossRef]
- Lu, P.; Zhou, J.; Zhang, H.; Zhang, R.; Wang, C. Chaotic differential bee colony optimization algorithm for dynamic economic dispatch problem with valve-point effects. Int. J. Electr. Power Energy Syst. 2014, 62, 130–143. [Google Scholar] [CrossRef]
- Elsheakh, Y.; Zou, S.; Ma, Z.; Zhang, B. Decentralised gradient projection method for economic dispatch problem with valve point effect. IET Gener. Transm. Distrib. 2018, 12, 3844–3851. [Google Scholar] [CrossRef]
- Mohammadi-Ivatloo, B.; Rabiee, A.; Soroudi, A.; Ehsan, M. Imperialist competitive algorithm for solving non-convex dynamic economic power dispatch. Energy 2012, 44, 228–240. [Google Scholar] [CrossRef] [Green Version]
- Niknam, T.; Golestaneh, F. Enhanced adaptive particle swarm optimisation algorithm for dynamic economic dispatch of units considering valve-point effects and ramp rates. IET Gener. Transm. Distrib. 2012, 6, 424–435. [Google Scholar] [CrossRef]
- Niknam, T.; Azizipanah-Abarghooee, R.; Aghaei, J. A new modified teaching-learning algorithm for reserve constrained dynamic economic dispatch. IEEE Trans. Power Syst. 2012, 28, 749–763. [Google Scholar] [CrossRef]
- Zaman, M.F.; Elsayed, S.M.; Ray, T.; Sarker, R.A. Evolutionary Algorithms for Dynamic Economic Dispatch Problems. IEEE Trans. Power Syst. 2016, 31, 1486–1495. [Google Scholar] [CrossRef]
- Wu, Z.; Ding, J.; Wu, Q.; Jing, Z.; Zheng, J. Reserve constrained dynamic economic dispatch with valve-point effect: A two-stage mixed integer linear programming approach. CSEE J. Power Energy Syst. 2017, 3, 203–211. [Google Scholar] [CrossRef]
- Wu, H.; Liu, X.; Ding, M. Dynamic economic dispatch of a microgrid: Mathematical models and solution algorithm. Int. J. Electr. Power Energy Syst. 2014, 63, 336–346. [Google Scholar] [CrossRef]
- Zhu, Y.; Qiao, B.; Dong, Y.; Qu, B.; Wu, D. Multiobjective dynamic economic emission dispatch using evolutionary algorithm based on decomposition. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 1323–1333. [Google Scholar] [CrossRef]
- Alshammari, M.E.; Ramli, M.A.M.; Mehedi, I.M. An Elitist Multi-Objective Particle Swarm Optimization Algorithm for Sustainable Dynamic Economic Emission Dispatch Integrating Wind Farms. Sustainability 2020, 12, 7253. [Google Scholar] [CrossRef]
- Somuah, C.B.; Khunaizi, N. Application of linear programming dispatch technique to dynamic generation allocation. IEEE Trans. Power Syst. 1990, 5, 20–26. [Google Scholar] [CrossRef]
- Lin, C.E.; Viviani, G.L. Hierarchical Economic Dispatch for Piecewise Quadratic Cost Functions. IEEE Trans. Power Appar. Syst. 1984, PAS-103, 1170–1175. [Google Scholar] [CrossRef]
- Dhar, R.; Mukherjee, P. Reduced-gradient method for economic dispatch. Proc. Inst. Electr. Eng. 1973, 120, 608–610. [Google Scholar] [CrossRef]
- Binetti, G.; Davoudi, A.; Naso, D.; Turchiano, B.; Lewis, F.L. A Distributed Auction-Based Algorithm for the Nonconvex Economic Dispatch Problem. IEEE Trans. Ind. Inform. 2013, 10, 1124–1132. [Google Scholar] [CrossRef]
- Hu, F.; Hughes, K.J.; Ingham, D.B.; Ma, L.; Pourkashanian, M. Dynamic economic and emission dispatch model considering wind power under Energy Market Reform: A case study. Int. J. Electr. Power Energy Syst. 2019, 110, 184–196. [Google Scholar] [CrossRef] [Green Version]
- McLarty, D.; Panossian, N.; Jabbari, F.; Traverso, A. Dynamic economic dispatch using complementary quadratic programming. Energy 2019, 166, 755–764. [Google Scholar] [CrossRef]
- Mahdi, F.P.; Vasant, P.; Kallimani, V.; Watada, J.; Fai, P.Y.S.; Abdullah-Al-Wadud, M. A holistic review on optimization strategies for combined economic emission dispatch problem. Renew. Sustain. Energy Rev. 2018, 81, 3006–3020. [Google Scholar] [CrossRef]
- Basu, M. Quasi-oppositional group search optimization for multi-area dynamic economic dispatch. Int. J. Electr. Power Energy Syst. 2016, 78, 356–367. [Google Scholar] [CrossRef]
- Huang, Y.-X.; Wang, X.-D.; Cheng, C.; Lin, D.T.-W. Geometry optimization of thermoelectric coolers using simplified conjugate-gradient method. Energy 2013, 59, 689–697. [Google Scholar] [CrossRef]
- Azizipanah-Abarghooee, R.; Niknam, T.; Gharibzadeh, M.; Golestaneh, F. Robust, fast and optimal solution of practical economic dispatch by a new enhanced gra-dient-based simplified swarm optimisation algorithm. IET Gener. Transm. Distrib. 2013, 7, 620–635. [Google Scholar] [CrossRef]
- Azizipanah-Abarghooee, R.; Dehghanian, P.; Terzija, V. Practical multi-area bi-objective environmental economic dispatch equipped with a hybrid gradient search method and improved Jaya algorithm. IET Gener. Transm. Distrib. 2016, 10, 3580–3596. [Google Scholar] [CrossRef] [Green Version]
- Hemamalini, S.; Simon, S.P. Dynamic economic dispatch using artificial immune system for units with valve-point effect. Int. J. Electr. Power Energy Syst. 2011, 33, 868–874. [Google Scholar] [CrossRef]
- Basu, M. Artificial immune system for dynamic economic dispatch. Int. J. Electr. Power Energy Syst. 2011, 33, 131–136. [Google Scholar] [CrossRef]
- Hatata, A.Y.; Hafez, A.A. Ant lion optimizer versus particle swarm and artificial immune system for economical and eco-friendly power system operation. Int. Trans. Electr. Energy Syst. 2019, 29, e2803. [Google Scholar] [CrossRef]
- Chao-Lung, C. Improved genetic algorithm for power economic dispatch of units with valve-point effects and multiple fuels. IEEE Trans. Power Syst. 2005, 20, 1690–1699. [Google Scholar]
- Zou, D.; Li, S.; Kong, X.; Ouyang, H.; Li, Z. Solving the combined heat and power economic dispatch problems by an improved genetic algorithm and a new constraint handling strategy. Appl. Energy 2019, 237, 646–670. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, X.; Ju, P.; Li, Q.; Qian, K.; Fu, Z. Determination of economic dispatch of wind farm-battery energy storage system using Genetic Algorithm. Int. Trans. Electr. Energy Syst. 2014, 24, 264–280. [Google Scholar] [CrossRef]
- Secui, D.C. A new modified artificial bee colony algorithm for the economic dispatch problem. Energy Convers. Manag. 2015, 89, 43–62. [Google Scholar] [CrossRef]
- Aydin, D.; Özyön, S.; Yaşar, C.; Liao, T. Artificial bee colony algorithm with dynamic population size to combined economic and emission dis-patch problem. Int. J. Electr. Power Energy Syst. 2014, 54, 144–153. [Google Scholar] [CrossRef]
- Mahdi, F.P.; Vasant, P.; Watada, J.; Kallimani, V.; Abdullah-Al-Wadud, M. A quantum-inspired particle swarm optimization approach for environmental/economic power dispatch problem using cubic criterion function. Int. Trans. Electr. Energy Syst. 2018, 28, e2497. [Google Scholar] [CrossRef]
- Tan, Y.; Cao, Y.; Li, C.; Li, Y.; Yu, L.; Zhang, Z.; Tang, S. Microgrid stochastic economic load dispatch based on two-point estimate method and improved particle swarm optimization. Int. Trans. Electr. Energy Syst. 2014, 25, 2144–2164. [Google Scholar] [CrossRef]
- Elsayed, W.T.; Hegazy, Y.G.; El-Bages, M.S.; Bendary, F.M. Improved Random Drift Particle Swarm Optimization With Self-Adaptive Mechanism for Solving the Power Economic Dispatch Problem. IEEE Trans. Ind. Inform. 2017, 13, 1017–1026. [Google Scholar] [CrossRef]
- Jadoun, V.K.; Gupta, N.; Niazi, K.; Swarnkar, A. Modulated particle swarm optimization for economic emission dispatch. Int. J. Electr. Power Energy Syst. 2015, 73, 80–88. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 Evolutionary Computation IEEE World Congress on Computational Intelligence, Anchorage, AK, USA, 4–9 May 1998. [Google Scholar]
- Shi, Y.; Eberhart, R.C. Empirical study of particle swarm optimization. In Proceedings of the Congress on Evolutionary Computation-CEC99, Washington, DC, USA, 6–9 July 1999. [Google Scholar]
- Al Bahrani, L.T.; Patra, J.C. Orthogonal PSO algorithm for economic dispatch of thermal generating units under various power constraints in smart power grid. Appl. Soft Comput. 2017, 58, 401–426. [Google Scholar] [CrossRef]
- Al-Bahrani, L.T.; Patra, J.C. Multi-gradient PSO algorithm for optimization of multimodal, discontinuous and non-convex fuel cost function of thermal generating units under various power constraints in smart power grid. Energy 2018, 147, 1070–1091. [Google Scholar] [CrossRef]
- Elattar, E.E. Environmental economic dispatch with heat optimization in the presence of renewable energy based on modified shuffle frog leaping algorithm. Energy 2019, 171, 256–269. [Google Scholar] [CrossRef]
- Meng, A.; Hu, H.; Yin, H.; Peng, X.; Guo, Z. Crisscross optimization algorithm for large-scale dynamic economic dispatch problem with valve-point effects. Energy 2015, 93 Pt 2, 2175–2190. [Google Scholar] [CrossRef]
- Niknam, T.; Golestaneh, F. Enhanced Bee Swarm Optimization Algorithm for Dynamic Economic Dispatch. IEEE Syst. J. 2013, 7, 754–762. [Google Scholar] [CrossRef]
- Mohammadi-Ivatloo, B.; Rabiee, A.; Soroudi, A. Nonconvex Dynamic Economic Power Dispatch Problems Solution Using Hybrid Immune-Genetic Algorithm. IEEE Syst. J. 2013, 7, 777–785. [Google Scholar] [CrossRef] [Green Version]
- Niknam, T.; Azizipanah-Abarghooee, R.; Roosta, A. Reserve Constrained Dynamic Economic Dispatch: A New Fast Self-Adaptive Modified Firefly Algorithm. IEEE Syst. J. 2012, 6, 635–646. [Google Scholar] [CrossRef]
- Gokhale, S.S.; Kale, V.S. An application of a tent map initiated Chaotic Firefly algorithm for optimal overcurrent relay co-ordination. Int. J. Electr. Power Energy Syst. 2016, 78, 336–342. [Google Scholar] [CrossRef]
- He, D.; Dong, G.; Wang, F.; Mao, Z.-Z. Optimization of dynamic economic dispatch with valve-point effect using chaotic sequence based differential evolution algorithms. Energy Convers. Manag. 2011, 52, 1026–1032. [Google Scholar] [CrossRef]
- Lu, Y.; Zhou, J.; Qin, H.; Wang, Y.; Zhang, Y. Chaotic differential evolution methods for dynamic economic dispatch with valve-point effects. Eng. Appl. Artif. Intell. 2011, 24, 378–387. [Google Scholar] [CrossRef]
- Zou, D.; Li, S.; Wang, G.-G.; Li, Z.; Ouyang, H. An improved differential evolution algorithm for the economic load dispatch problems with or without valve-point effects. Appl. Energy 2016, 181, 375–390. [Google Scholar] [CrossRef]
- Arul, R.; Ravi, G.; Velusami, S. Chaotic self-adaptive differential harmony search algorithm based dynamic economic dispatch. Int. J. Electr. Power Energy Syst. 2013, 50, 85–96. [Google Scholar] [CrossRef]
- Mohammadi-Ivatloo, B.; Rabiee, A.; Ehsan, M. Time-varying acceleration coefficients IPSO for solving dynamic economic dipatch with non-smooth cost function. Energy Convers. Manag. 2012, 56, 175–183. [Google Scholar] [CrossRef]
- Al Bahrani, L.T.; Patra, J.C.; Kowalczyk, R. Multi-gradient PSO algorithm for economic dispatch of thermal generating units in smart grid. In Proceedings of the 2016 IEEE Innovative Smart Grid Technologies-Asia (ISGT-Asia), Melbourne, VIC, Australia, 28 November–1 December 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Al-Bahrani, L.; Patra, J.; Stojceveski, A. Solving economic dispatch problem under valve-point loading effects and generation constraints using a multi-gradient PSO algorithm. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Al-Bahrani, L. Intelligent System Design, Operation and Management to Govern on Electrical Energy to the Consumer; School of Software anf Electrical Engineering, Swinburne University of Technology Library: Melbourne, Australia, 2018. [Google Scholar]
- Karimi, N.; Khandani, K. Social optimization algorithm with application to economic dispatch problem. Int. Trans. Electr. Energy Syst. 2020, 30, e12593. [Google Scholar] [CrossRef]
- Chen, C.; Zou, D.; Li, C. Improved Jaya algorithm for economic dispatch considering valve-point effect and multifuel options. IEEE Access 2020, 8, 84981–84995. [Google Scholar] [CrossRef]
- Abdelaziz, A.Y.; Kamh, M.; Mekhamer, S.; Badr, M. A hybrid HNN-QP approach for dynamic economic dispatch problem. Electr. Power Syst. Res. 2008, 78, 1784–1788. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Neural Networks, Proceedings of the IEEE International Conference on Cybernetics, Perth, WA, Australia, 27 November–1 December1995; IEEE: Piscataway, NJ, USA, 1995. [Google Scholar]
- Kennedy, J. The behavior of particles. In Proceedings of the Evolutionary Programming VII: 7th International Conference, EP98, San Diego, CA, USA, 25–27 March 1998; Porto, V.W., Ed.; Springer: Berlin/Heidelberg, Germany, 1998; pp. 579–589. [Google Scholar]
- Bratton, D.; Kennedy, J. 2007 IEEE Swarm Intelligence Symposium; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Selvakumar, A.I. Enhanced cross-entropy method for dynamic economic dispatch with valve-point effects. Int. J. Electr. Power Energy Syst. 2011, 33, 783–790. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TPUi | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| TPU1 | 0.00043 | 21.60 | 958.29 | 450 | 0.041 | 150 | 470 | 80 | 80 |
| TPU2 | 0.00063 | 21.05 | 1313.60 | 600 | 0.036 | 135 | 460 | 80 | 80 |
| t | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 1036 | 1110 | 1258 | 1406 | 1480 | 1628 | 1702 | 1776 | 1924 | 2072 | 2146 | 2220 | |
| t | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 2072 | 1924 | 1776 | 1554 | 1480 | 1628 | 1776 | 2072 | 1924 | 1628 | 1332 | 1184 |
| TPUi | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.00043 | 0.00063 | 0.00039 | 0.00070 | 0.00079 | 0.00056 | 0.00211 | 0.00480 | 0.10908 | 0.00951 | |
| 21.60 | 21.05 | 20.81 | 23.90 | 21.62 | 17.87 | 16.51 | 23.23 | 19.58 | 22.54 | |
| 958.20 | 1313.6 | 604.97 | 471.60 | 480.29 | 601.75 | 502.70 | 639.40 | 455.60 | 692.40 | |
| 450 | 600 | 320 | 260 | 280 | 310 | 300 | 340 | 270 | 380 | |
| 0.041 | 0.036 | 0.028 | 0.052 | 0.063 | 0.048 | 0.086 | 0.082 | 0.098 | 0.094 | |
| 470 | 460 | 340 | 300 | 243 | 160 | 130 | 120 | 80 | 55 | |
| 150 | 135 | 73 | 60 | 73 | 57 | 20 | 47 | 20 | 55 | |
| 80 | 80 | 80 | 50 | 50 | 50 | 30 | 30 | 30 | 30 | |
| 80 | 80 | 80 | 50 | 50 | 50 | 30 | 30 | 30 | 30 |
| Parameters | Exploration Stage | Exploitation Stage | |
|---|---|---|---|
| 0.3 | 0.3 | 0.3 | |
| c1, c2 | 2.05 | 2.05 | 2.05 |
| 150 | 150 | 350 | |
| 0.80 | 0.80 | 0.35 | |
| 0.10 | 0.20 | 0.20 | |
| −4.66 × 10−3 | −3.99 × 10−3 | −4.28 × 10−4 | |
| t | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 150.02 | 135.00 | 194.93 | 60.00 | 122.00 | 122.96 | 129.00 | 47.00 | 20.04 | 55.00 | 28,184.9284 | 9.23 |
| 2 | 150.02 | 135.05 | 268.96 | 60.05 | 122.02 | 122.85 | 129.00 | 47.00 | 20.00 | 55.00 | 29,738.3371 | 9.12 |
| 3 | 226.62 | 215.00 | 309.57 | 60.00 | 73.01 | 122.53 | 129.00 | 47.24 | 20.00 | 55.00 | 32,884.0400 | 9.21 |
| 4 | 303.02 | 222.03 | 324.00 | 60.75 | 122.37 | 122.81 | 129.00 | 47.00 | 20.00 | 55.00 | 36,118.9614 | 9.23 |
| 5 | 379.42 | 302.00 | 291.00 | 60.04 | 73.17 | 122.59 | 129.65 | 47.00 | 20.10 | 55.00 | 37,738.0667 | 9.47 |
| 6 | 456.00 | 309.17 | 306.48 | 60.44 | 122.12 | 122.76 | 129.00 | 47.00 | 20.00 | 55.00 | 40,942.9400 | 9.47 |
| 7 | 456.00 | 309.00 | 308.99 | 80.98 | 172.00 | 123.99 | 129.00 | 47.00 | 20.00 | 55.00 | 42,607.1703 | 9.72 |
| 8 | 456.00 | 309.06 | 309.00 | 126.99 | 172.99 | 152.00 | 129.00 | 47.00 | 20.00 | 55.00 | 44,217.7972 | 9.82 |
| 9 | 456.00 | 389.00 | 306.00 | 176.96 | 222.04 | 122.99 | 129.00 | 47.00 | 20.00 | 55.00 | 47,653.4300 | 9.89 |
| 10 | 456.00 | 396.00 | 299.00 | 226.93 | 222.05 | 160.99 | 129.00 | 77.00 | 50.00 | 55.00 | 51,082.4354 | 9.16 |
| 11 | 256.01 | 396.01 | 341.00 | 248.76 | 222.37 | 160.24 | 129.58 | 85.00 | 52.00 | 55.00 | 52,760.8264 | 9.42 |
| 12 | 456.03 | 460.00 | 300.99 | 298.43 | 222.53 | 160.99 | 129.00 | 85.00 | 52.00 | 55.00 | 54,507.9729 | 9.10 |
| 13 | 456.00 | 396.00 | 298.00 | 248.49 | 222.50 | 160.00 | 129.00 | 85.00 | 22.00 | 55.00 | 51,001.1804 | 9.36 |
| 14 | 456.76 | 396.00 | 287.99 | 198.88 | 172.06 | 122.99 | 129.28 | 85.00 | 20.00 | 55.00 | 47,808.6845 | 9.15 |
| 15 | 379.99 | 396.00 | 284.00 | 180.99 | 122.99 | 123.00 | 129.00 | 85.00 | 20.00 | 55.00 | 44,544.4962 | 9.40 |
| 16 | 303.00 | 316.00 | 318.00 | 131.00 | 74.00 | 123.00 | 129.00 | 85.00 | 20.00 | 55.00 | 39,562.9241 | 9.20 |
| 17 | 226.00 | 310.00 | 288.99 | 120.99 | 122.00 | 122.99 | 129.00 | 85.00 | 20.00 | 55.00 | 37,930.0339 | 9.45 |
| 18 | 303.15 | 309.00 | 310.00 | 121.00 | 172.84 | 123.00 | 129.00 | 85.00 | 20.00 | 55.00 | 41,163.4372 | 9.80 |
| 19 | 379.01 | 389.00 | 301.99 | 120.98 | 173.00 | 123.00 | 129.00 | 85.00 | 20.00 | 55.00 | 44,378.0508 | 9.61 |
| 20 | 457.00 | 460.00 | 313.00 | 171.00 | 223.00 | 123.00 | 130.00 | 86.00 | 21.00 | 56.00 | 50,781.9900 | 9.45 |
| 21 | 456.20 | 396.00 | 315.99 | 121.00 | 222.74 | 123.00 | 129.04 | 85.00 | 20.00 | 55.00 | 47,611.3299 | 9.54 |
| 22 | 379.81 | 316.09 | 275.99 | 70.99 | 172.99 | 122.99 | 129.09 | 85.00 | 20.00 | 55.00 | 41,101.1436 | 9.35 |
| 23 | 303.00 | 236.00 | 197.00 | 61.00 | 123.00 | 123.00 | 129.00 | 85.00 | 20.00 | 55.00 | 34,693.3884 | 9.31 |
| 24 | 226.90 | 222.44 | 189.93 | 60.14 | 73.00 | 122.13 | 129.00 | 85.00 | 20.00 | 55.10 | 31,476.8566 | 9.34 |
| Total | 1,010,490.42 USD | 225.80 s | ||||||||||
| No. | NTOTs | σ | ||||
|---|---|---|---|---|---|---|
| 1 | EP [9] | 1,048,638.00 | NA | NA | NA | 902.94 |
| 2 | GPSO-w [10] | 1,027,679.00 | 1,034,340.00 | 1,031,716.00 | NA | NA |
| 3 | EAPSO [17] | 1,018,510.00 | 1,019,302.00 | 1,018,710.00 | NA | 37.50 |
| 4 | TLA [18] | 1,019,925.00 | 1,021,118.00 | 1,020,411.00 | NA | 2.94 |
| 5 | ICA [18] | 1,018,467.00 | 1,021,796.00 | 1,019,291.00 | 693.487 | NA |
| 6 | GA [20] | 1,033,481.00 | 1,042,606.00 | 1,038,014.00 | NA | NA |
| 7 | ABC [41] | 1,021,576.00 | 1,024,316.00 | 1,022,686.00 | NA | 156.18 |
| 8 | CSO [52] | 1,017,660.00 | 1,019,286.00 | 1,018,710.00 | 302.3103 | 57.66 |
| 9 | HIGA [54] | 1,108,473.00 | 1,022,284.00 | 1,019,328.00 | NA | 211.8 |
| 10 | CSDE [57] | 1,023,432.00 | 1,027,634.00 | 1,026,475.00 | NA | 18.00 |
| 11 | CDBCO [58] | 1,021,500.00 | NA | 1,024,300.00 | NA | 40.20 |
| 12 | MG-PSO | 1,010,490.42 | 1,010,490.47 | 1,010,490.45 | 0.0104 | 225.80 |
| t | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 1036 | 1110 | 1258 | 1406 | 1480 | 1628 | 1702 | 1766 | 1924 | 2072 | 2146 | 2220 | |
| 1035.95 | 1109.95 | 1257.97 | 1405.98 | 1479.97 | 1627.97 | 1701.96 | 1777.04 | 1923.99 | 2017.97 | 2145.97 | 2219.97 | |
| t | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 2072 | 1924 | 1776 | 1554 | 1480 | 1628 | 1776 | 2072 | 1924 | 1628 | 1332 | 1184 | |
| 2171.99 | 1923.96 | 1775.97 | 1554.00 | 1479.97 | 1627.99 | 1775.98 | 2071.76 | 1923.97 | 1627.95 | 1332.00 | 1183.64 |
| Bji | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 8.70 | 0.43 | −4.61 | 0.36 | 0.32 | −0.66 | 0.96 | −1.60 | 0.80 | −0.10 |
| 2 | 0.43 | 8.30 | −0.97 | 0.22 | 0.75 | −0.28 | 5.04 | 1.70 | 0.54 | 7.20 |
| 3 | −4.61 | −0.97 | 9.00 | −2.00 | 0.63 | 3.00 | 1.70 | −4.30 | 3.10 | −2.00 |
| 4 | 0.36 | 0.22 | −2.00 | 5.30 | 0.47 | 2.62 | −1.96 | 2.10 | 0.67 | 1.80 |
| 5 | 0.32 | 0.75 | 0.63 | 0.47 | 8.60 | −0.80 | 0.37 | 0.72 | −0.90 | 0.69 |
| 6 | −0.66 | −0.28 | 3.00 | 2.62 | −0.80 | 11.80 | −4.90 | 0.30 | 3.00 | −3.00 |
| 7 | 0.96 | 5.04 | 1.70 | −1.96 | 0.37 | −4.90 | 8.24 | −0.90 | 5.90 | −0.60 |
| 8 | −1.60 | 1.70 | −4.30 | 2.10 | 0.72 | 0.30 | −0.90 | 1.20 | −0.96 | 0.56 |
| 9 | 0.80 | 0.54 | 3.10 | 0.67 | −0.90 | 3.00 | 5.90 | −0.96 | 0.93 | −0.30 |
| 10 | −0.10 | 7.20 | −2.00 | 1.80 | 0.69 | −3.00 | −0.60 | 0.56 | −0.30 | 0.99 |
| t | Pl,t | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 150.00 | 135.00 | 207.00 | 60.12 | 122.00 | 122.99 | 129.0 | 47.00 | 20.00 | 55.00 | 1048.12 | 12.12 | 1036 | 0.00 | 28,439.90 | 9.46 |
| 2 | 150.21 | 135.01 | 282.54 | 60.99 | 122.01 | 122.87 | 129.0 | 47.00 | 20.00 | 55.00 | 1124.63 | 14.63 | 1110 | 0.00 | 30,060.63 | 9.22 |
| 3 | 226.11 | 135.00 | 308.00 | 60.35 | 172.42 | 123.00 | 129.0 | 47.00 | 20.00 | 55.00 | 1275.88 | 17.88 | 1258 | 0.00 | 33,338.67 | 9.31 |
| 4 | 303.00 | 215.00 | 305.00 | 60.20 | 172.21 | 122.95 | 129.0 | 47.00 | 20.00 | 55.00 | 1429.36 | 23.37 | 1406 | 0.00 | 36,637.72 | 9.33 |
| 5 | 379.81 | 222.21 | 297.63 | 60.00 | 172.71 | 122.42 | 129.5 | 47.00 | 20.00 | 55.00 | 1506.28 | 26.28 | 1480 | 0.00 | 38,296.74 | 9.57 |
| 6 | 456.50 | 222.20 | 305.04 | 80.06 | 222.61 | 122.56 | 129.5 | 47.00 | 20.00 | 55.00 | 1660.47 | 32.47 | 1628 | 0.00 | 41,715.72 | 9.57 |
| 7 | 456.50 | 302.27 | 312.27 | 120.41 | 172.70 | 122.41 | 129.5 | 47.00 | 20.00 | 55.00 | 1738.06 | 36.06 | 1702 | 0.00 | 43,450.29 | 9.82 |
| 8 | 456.50 | 309.27 | 299.55 | 170.45 | 172.70 | 122.61 | 129.52 | 77.00 | 20.00 | 55.00 | 1812.60 | 36.60 | 1776 | 0.00 | 45,261.46 | 9.92 |
| 9 | 456.50 | 389.50 | 299.57 | 189.50 | 222.61 | 122.43 | 129.5 | 85.30 | 20.00 | 55.00 | 1969.90 | 45.90 | 1924 | 0.00 | 48,733.35 | 9.69 |
| 10 | 456.50 | 396.80 | 325.60 | 239.50 | 222.91 | 160.00 | 129.5 | 115.30 | 20.00 | 55.00 | 2121.11 | 49.11 | 2072 | 0.00 | 52,202.09 | 9.26 |
| 11 | 458.40 | 396.80 | 340.15 | 289.50 | 227.60 | 160.02 | 129.5 | 120.00 | 20.00 | 55.00 | 2196.97 | 50.97 | 2146 | 0.00 | 53,836.89 | 9.52 |
| 12 | 456.50 | 460.00 | 325.14 | 300.00 | 222.61 | 160.00 | 129.5 | 120.00 | 50.00 | 55.00 | 2278.75 | 58.75 | 2220 | 0.00 | 55,806.50 | 9.19 |
| 13 | 456.50 | 396.80 | 298.55 | 300.00 | 222.60 | 122.42 | 129.5 | 120.00 | 20.00 | 55.00 | 2121.36 | 49.36 | 2072 | 0.00 | 52,386.68 | 9.39 |
| 14 | 456.50 | 316.80 | 302.45 | 250.00 | 222.60 | 122.40 | 129.5 | 90.00 | 20.00 | 55.00 | 1965.25 | 41.25 | 1924 | 0.00 | 48,807.00 | 9.25 |
| 15 | 379.80 | 309.50 | 294.85 | 241.12 | 172.76 | 122.46 | 129.5 | 85.30 | 20.00 | 55.00 | 1810.28 | 34.28 | 1776 | 0.00 | 45,390.70 | 9.49 |
| 16 | 303.25 | 229.50 | 318.48 | 191.24 | 122.83 | 122.40 | 129.5 | 85.30 | 20.01 | 55.00 | 1577.50 | 23.50 | 1554 | 0.00 | 40,201.11 | 9.28 |
| 17 | 226.60 | 222.20 | 287.67 | 180.76 | 172.70 | 122.68 | 129.50 | 85.30 | 20.00 | 55.00 | 1502.41 | 22.41 | 1480 | 0.00 | 38,564.89 | 9.55 |
| 18 | 303.25 | 222.20 | 312.74 | 180.80 | 222.60 | 123.52 | 129.50 | 85.30 | 20.00 | 55.00 | 1654.90 | 26.90 | 1628 | 0.00 | 41,874.71 | 9.89 |
| 19 | 379.80 | 302.20 | 313.17 | 180.80 | 222.60 | 122.56 | 129.50 | 85.30 | 20.00 | 55.00 | 1810.92 | 34.92 | 1776 | 0.00 | 45,252.41 | 9.70 |
| 20 | 456.50 | 382.20 | 340.17 | 230.81 | 230.40 | 160.01 | 129.50 | 115.30 | 20.00 | 55.00 | 2119.89 | 47.89 | 2072 | 0.00 | 52,004.90 | 9.51 |
| 21 | 456.50 | 396.90 | 301.41 | 180.80 | 222.60 | 122.40 | 129.50 | 85.30 | 20.00 | 55.00 | 1970.40 | 46.40 | 1924 | 0.00 | 48,721.06 | 9.54 |
| 22 | 379.80 | 316.80 | 278.34 | 130.83 | 172.70 | 122.62 | 129.50 | 55.30 | 20.00 | 55.00 | 1660.89 | 32.89 | 1628 | 0.00 | 41,817.63 | 9.45 |
| 23 | 303.20 | 236.80 | 198.30 | 118.30 | 122.80 | 122.40 | 129.96 | 47.00 | 20.00 | 55.00 | 1353.76 | 21.76 | 1332 | 0.00 | 35,306.36 | 9.39 |
| 24 | 226.60 | 222.20 | 184.72 | 120.40 | 73.01 | 122.50 | 129.50 | 47.00 | 20.00 | 55.00 | 1200.92 | 16.92 | 1184 | 0.00 | 31,853.95 | 9.39 |
| Total | 802.62 MW | 1,029,961.36 USD | 227.7 s | |||||||||||||
| No. | NTOTS | σ | |||||
|---|---|---|---|---|---|---|---|
| 1 | AIS [10] | 1,045,715.00 | 1,048,431.00 | 1,047,050.00 | NA | 835.62 | 1858.20 |
| 2 | GA [10] | 1,052,251.00 | 1,062,511.00 | 1,058,041.00 | NA | NA | 206.64 |
| 3 | GPSO-w [10] | 1,048,410.00 | 1,057,170.00 | 1,052,092.00 | NA | NA | 245.58 |
| 4 | CDBCO [14] | 1,042,900.00 | 1,043,626.00 | 1,044,700.00 | NA | 839.31 | 91.80 |
| 5 | ICA [16] | 1,040,758.00 | 1,043,173.00 | 1,041,664.00 | 603.758 | 848.79 | NA |
| 6 | CSO [52] | 1,038,320.00 | 1,042,518.00 | 1,039,374.00 | 395.673 | 802.68 | 88.86 |
| 7 | EBSO [53] | 1,038,915.00 | 1,039,272.00 | 1,039,188.00 | NA | NA | 13.20 |
| 8 | HIGA [54] | 1,041,088.00 | 1,042,516.00 | 1,041,218.00 | NA | 853.53 | NA |
| 9 | ECE [71] | 1,043,989.00 | NA | 1,044,470.00 | NA | NA | 228.0 |
| 10 | MG-PSO | 1,029,961.36 | 1,029,961.40 | 1,029,961.37 | 0.035 | 802.62 | 227.7 |
| Parameters | Exploration Stage | Exploitation Stage | ||
|---|---|---|---|---|
| 0.3 | 0.3 | 0.3 | 0.3 | |
| c1, c2 | 2.05 | 2.05 | 2.05 | 2.05 |
| 150 | 150 | 150 | 350 | |
| 0.90 | 0.80 | 0.80 | 0.35 | |
| 0.05 | 0.10 | 0.20 | 0.20 | |
| −5.66 × 10−3 | −4.66 × 10−3 | −3.99 × 10−3 | −4.28 × 10−4 | |
| No. | NTOTs | σ | ||||
|---|---|---|---|---|---|---|
| Case #3: 100 TPU | ||||||
| 1 | CSO [52] | 10,183,633.00 | 10,192,352.00 | 10,185,287.00 | 1323.00 | 297.00 |
| 2 | GA [55] | 10,908.741.00 | 11,987,675.00 | 11,584,628.00 | NA | 542.40 |
| 3 | GPSO-w [55] | 10,366.076.00 | 11,310,279.00 | 10,766,385.00 | NA | 353.40 |
| 4 | FA [55] | 10,197,269.00 | 11,216,243.00 | 10,419,457.00 | NA | 266.46 |
| 5 | SAFA [55] | 10,183,819.00 | 10,388,958.00 | 10,286,043.00 | NA | 84.60 |
| 6 | MG-PSO | 9,549,134.75 | 9,549,134.96 | 9,549,134.68 | 0.098 | 419.98 |
| Case #4: 500 TPU | ||||||
| 1 | CSO [52] | 51.044,611.00 | 51,082,986.00 | 51,050,457.00 | 6067.00 | 534.60 |
| 2 | MG-PSO | 49,655,500.34 | 49,655,501.81 | 49,655,501.73 | 0.511 | 765.29 |
| Case #5: 1000 TPU | ||||||
| 1 | CSO [52] | 102,122,060.00 | 102,186,925.00 | 102,133,104.00 | 9627.00 | 721.8 |
| 2 | MG-PSO | 99,311,000.68 | 99,311,003.63 | 99,311.001.47 | 1.022 | 903.34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Bahrani, L.; Seyedmahmoudian, M.; Horan, B.; Stojcevski, A. Solving the Real Power Limitations in the Dynamic Economic Dispatch of Large-Scale Thermal Power Units under the Effects of Valve-Point Loading and Ramp-Rate Limitations. Sustainability 2021, 13, 1274. https://doi.org/10.3390/su13031274
Al-Bahrani L, Seyedmahmoudian M, Horan B, Stojcevski A. Solving the Real Power Limitations in the Dynamic Economic Dispatch of Large-Scale Thermal Power Units under the Effects of Valve-Point Loading and Ramp-Rate Limitations. Sustainability. 2021; 13(3):1274. https://doi.org/10.3390/su13031274
Chicago/Turabian StyleAl-Bahrani, Loau, Mehdi Seyedmahmoudian, Ben Horan, and Alex Stojcevski. 2021. "Solving the Real Power Limitations in the Dynamic Economic Dispatch of Large-Scale Thermal Power Units under the Effects of Valve-Point Loading and Ramp-Rate Limitations" Sustainability 13, no. 3: 1274. https://doi.org/10.3390/su13031274