
Activity Scheduling Behavior of the Visitors to an Outdoor Recreational Facility Using GPS Data


Abstract
:1. Introduction
- Strategic level (departure time choice and activity pattern choice);
- Tactical level (activity scheduling, activity area choice, and route choice);
- Operational level (direction and speed).
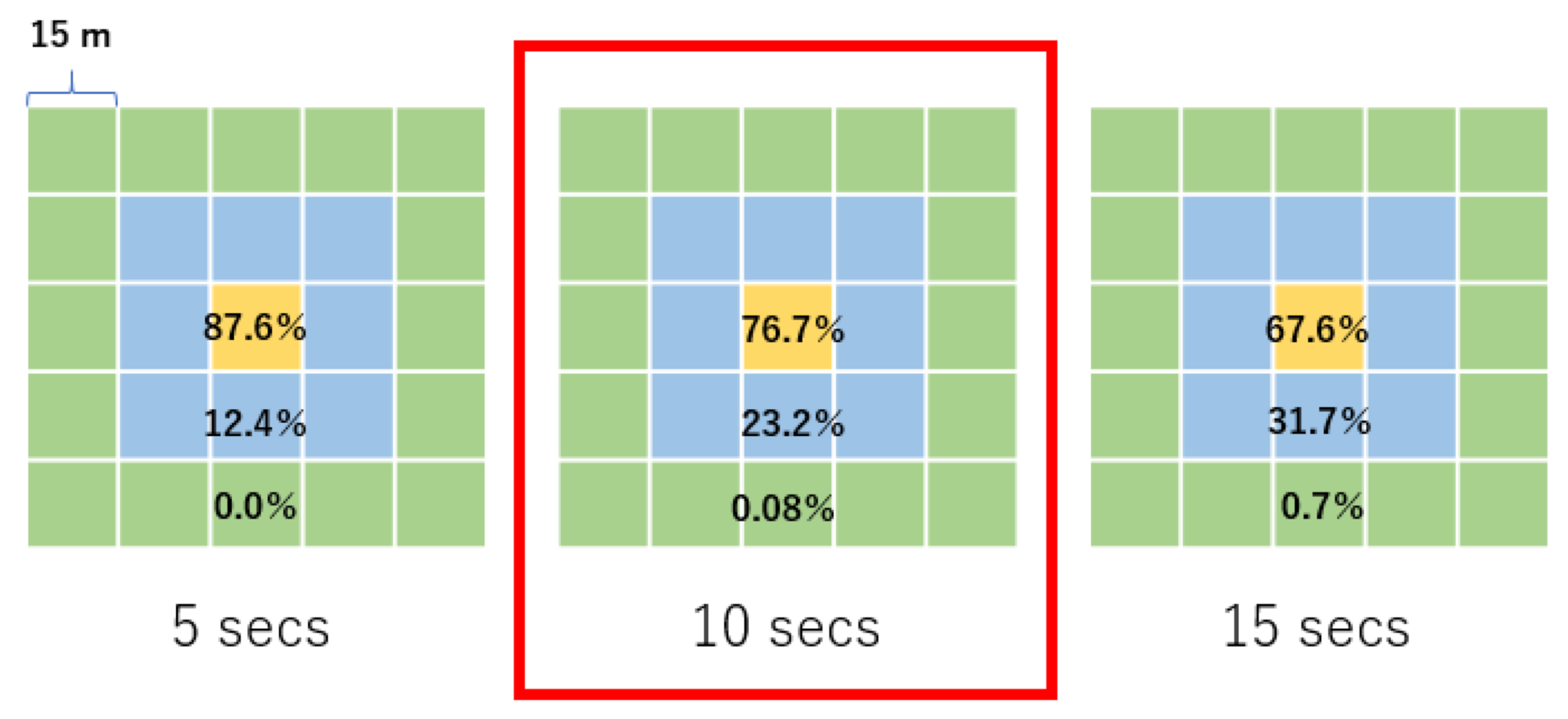
- A processing method is proposed to discretize the GPS data into a two-dimensional grid-based spatial representation with high spatial resolution in order to represent the complex behavior of pedestrians.
- The decision-making behavior of the visitors is clarified based on the activity choice and the time allocation in an outdoor facility by using the dynamic activity scheduling model.
2. Literature Review
2.1. Spatial Representation of GPS Data
2.2. Activity Scheduling Models for Pedestrians
3. Materials and Methods
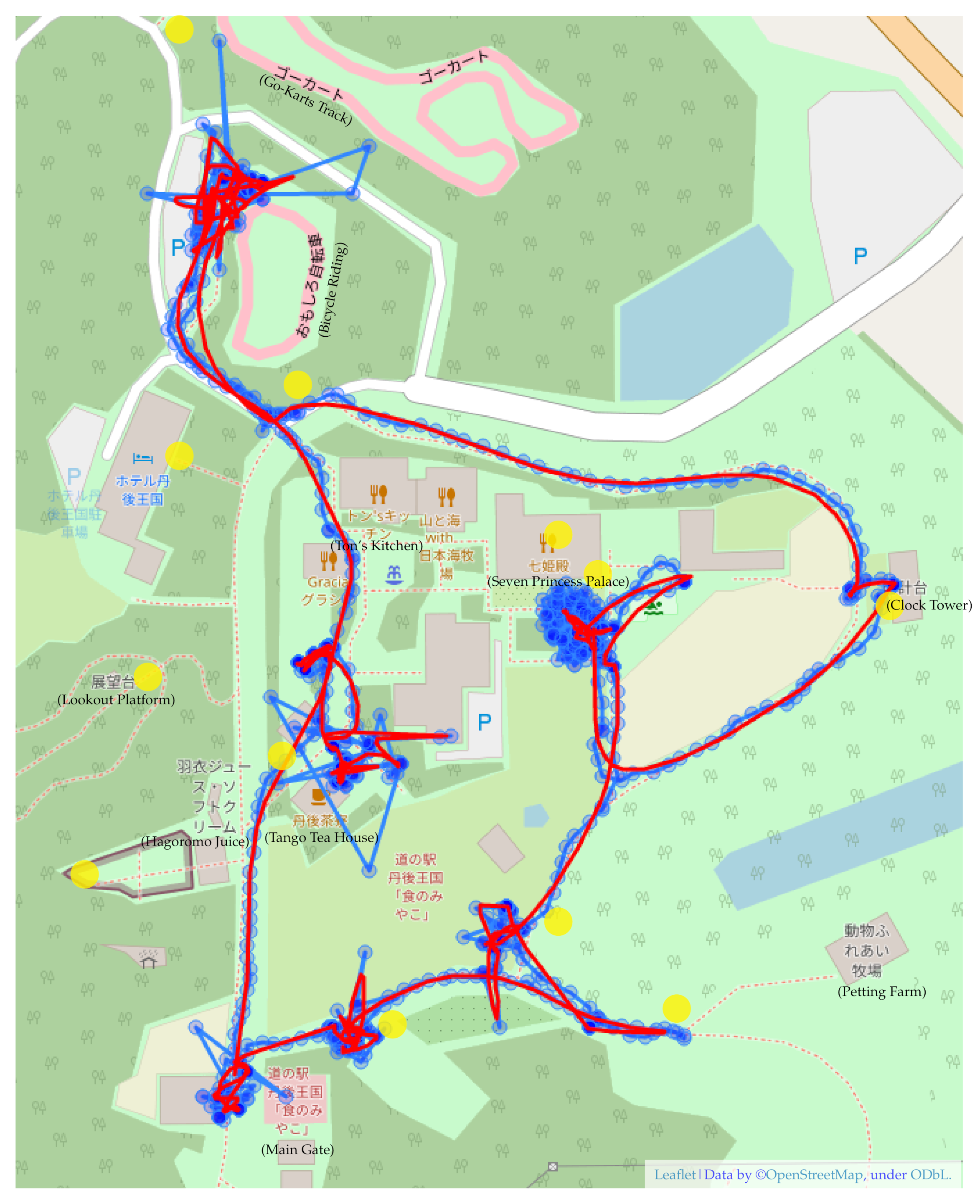
3.1. Data Acquisition
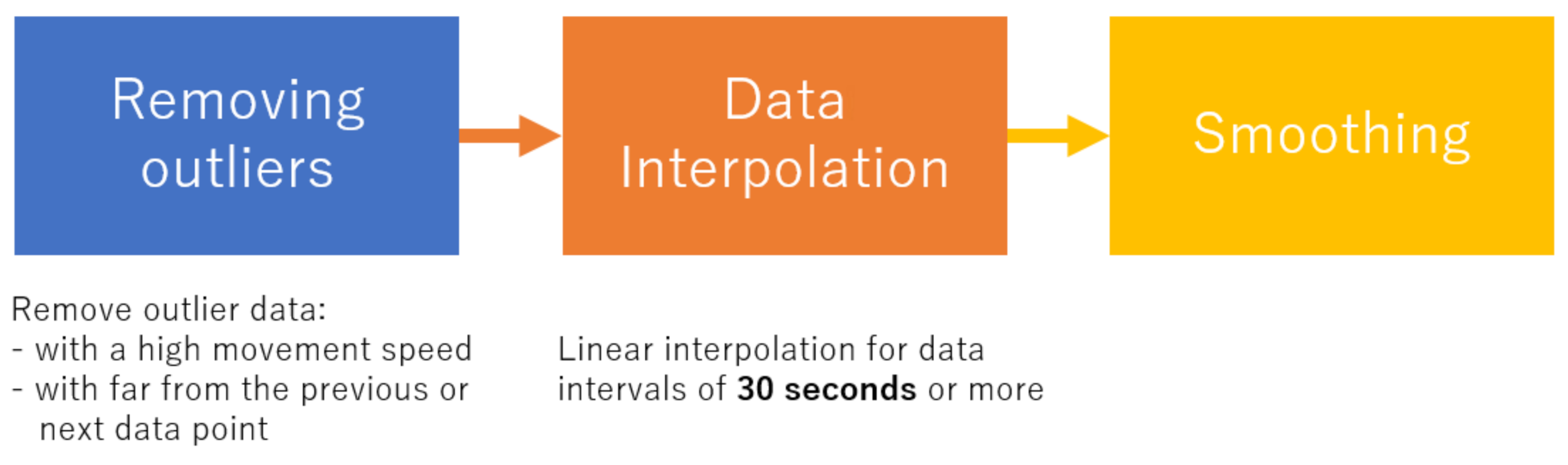
3.2. Data Processing Methods
- Denoising and Smoothing;
- Allocation to grids.
3.2.1. Denoising and Smoothing
- Large noise in specific locations such as indoor areas or mountainous areas;
- GPS-specific measurement errors;
- Missing data or unevenly-spaced data.
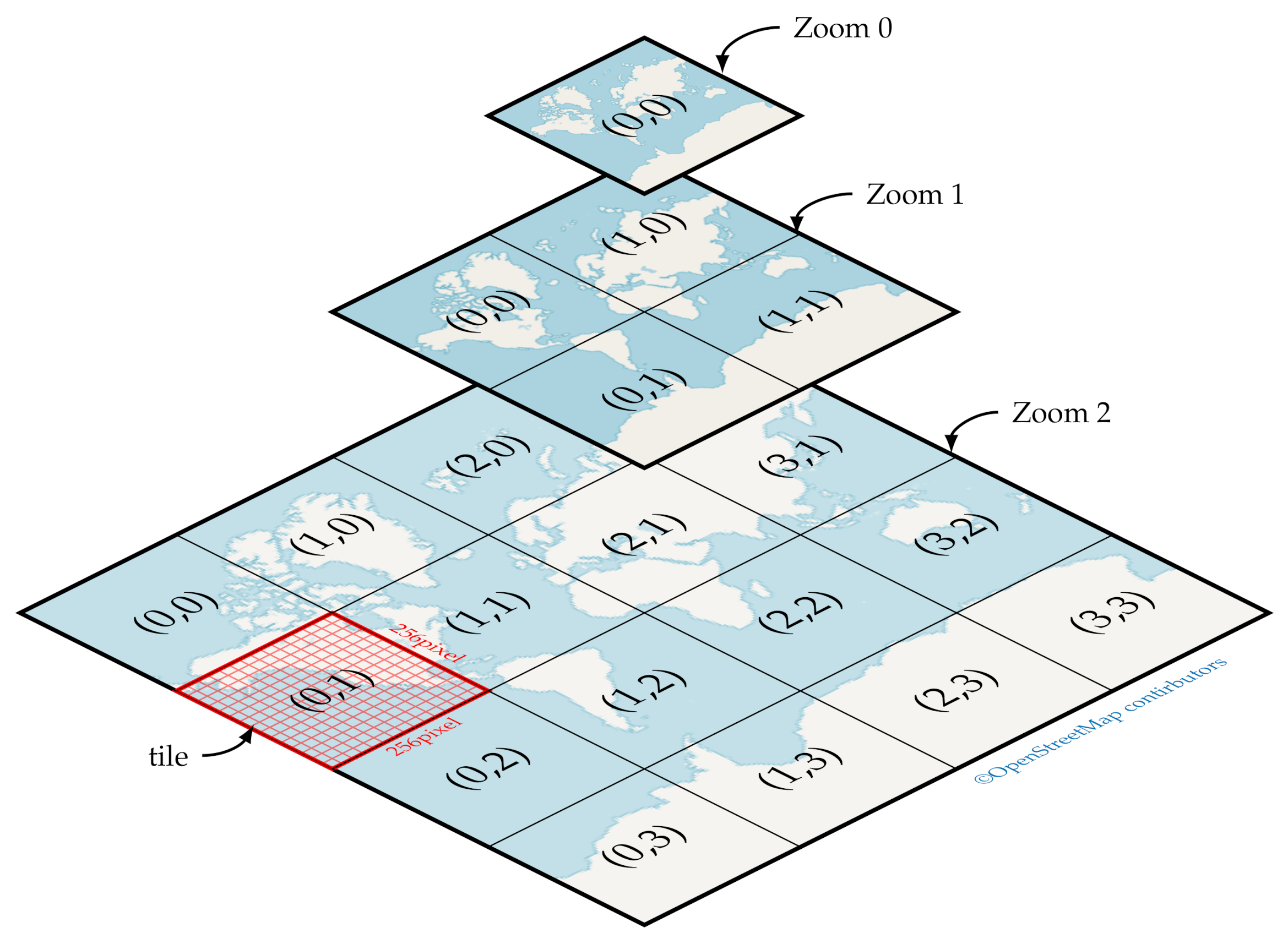
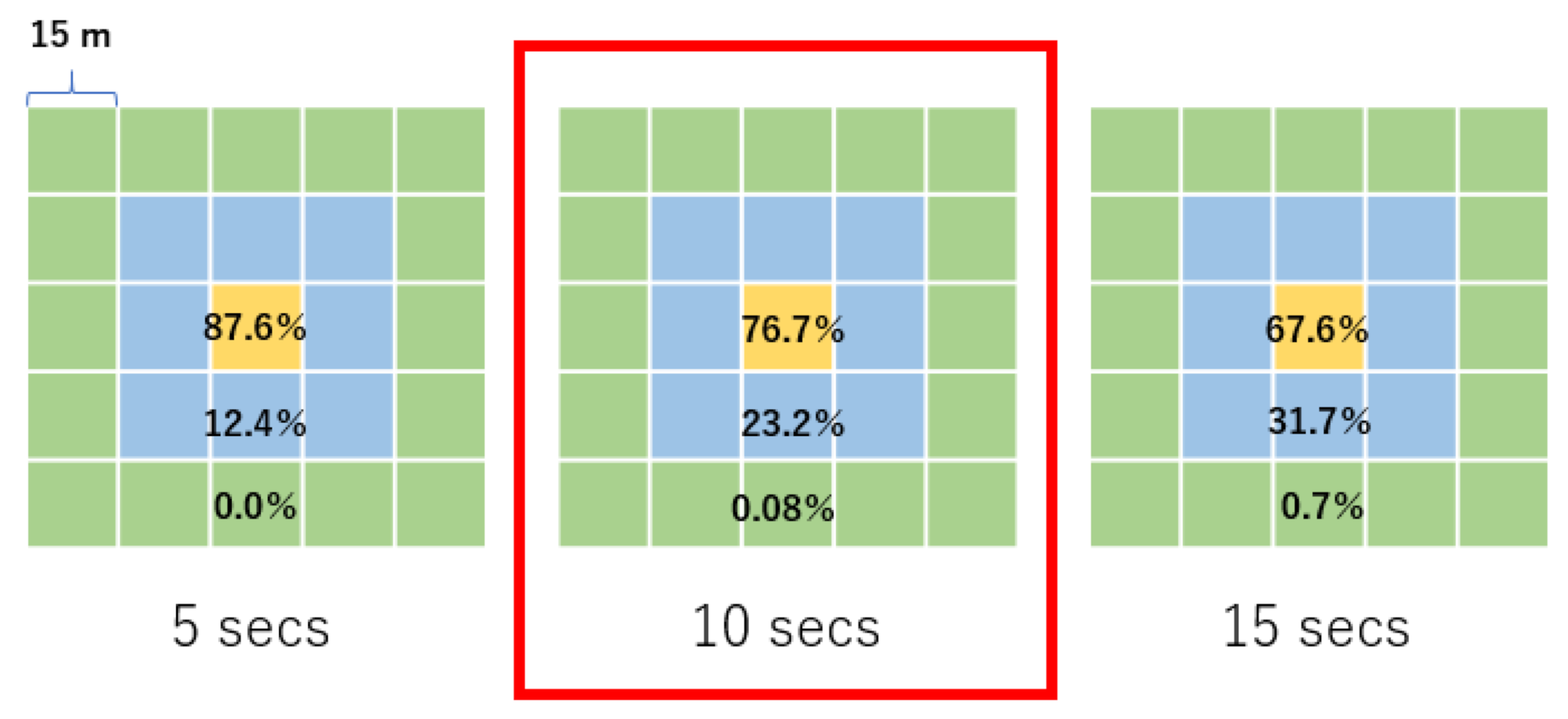
3.2.2. Allocation to Discretized Grids
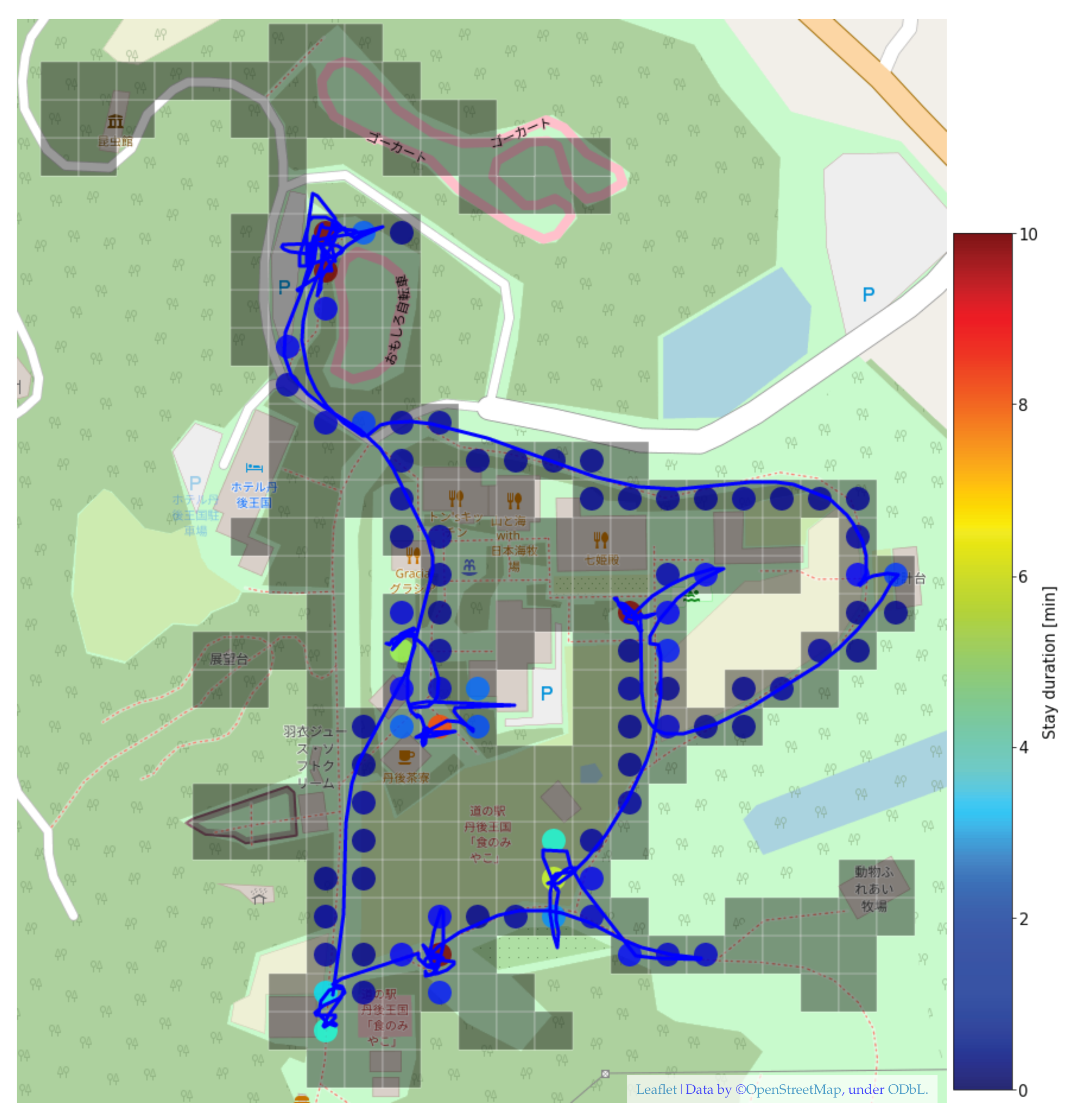
3.2.3. Episode Extraction
3.3. Activity Scheduling Model
4. Results and Discussion
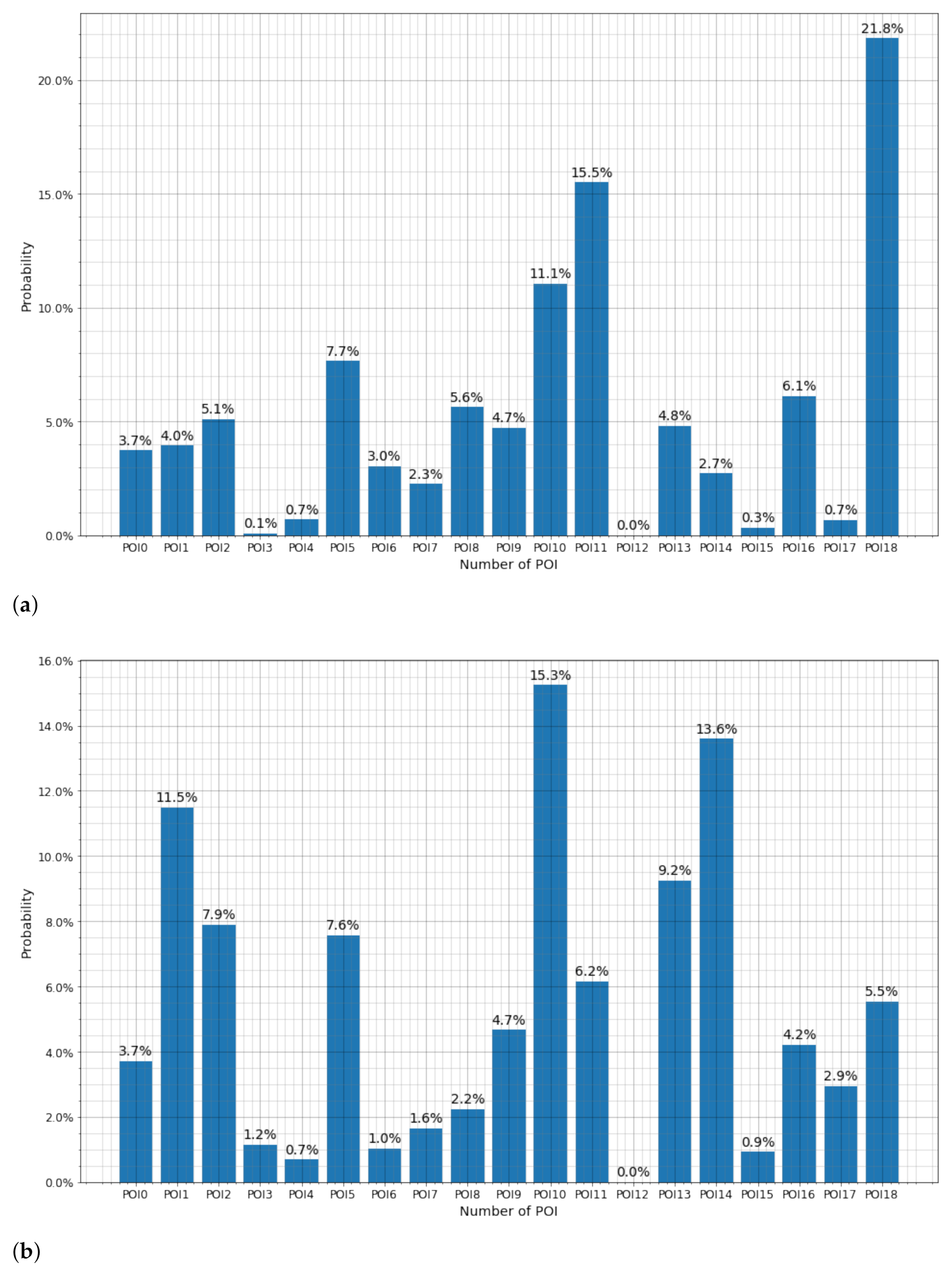
4.1. Activity Choice Model
4.2. Activity Time Allocation Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BLE | Bluetooth Low Energy |
| GPS | Global Positioning System |
| POIs | Point of Interests |
References
- Carmona, M. Place value: Place quality and its impact on health, social, economic and environmental outcomes. J. Urban Des. 2019, 24, 1–48. [Google Scholar] [CrossRef] [Green Version]
- Mehta, V. Lively streets: Determining environmental characteristics to support social behavior. J. Plan. Educ. Res. 2007, 27, 165–187. [Google Scholar] [CrossRef]
- Anderson, J.; Ruggeri, K.; Steemers, K.; Huppert, F. Lively social space, well-being activity, and urban design: Findings from a low-cost community-led public space intervention. Environ. Behav. 2017, 49, 685–716. [Google Scholar] [CrossRef]
- Hoogendoorn, S.P.; Bovy, P.H. Pedestrian route-choice and activity scheduling theory and models. Transp. Res. Part B Methodol. 2004, 38, 169–190. [Google Scholar] [CrossRef]
- Antonini, G.; Bierlaire, M.; Weber, M. Discrete choice models of pedestrian walking behavior. Transp. Res. Part Methodol. 2006, 40, 667–687. [Google Scholar] [CrossRef]
- Blue, V.J.; Adler, J.L. Cellular automata microsimulation for modeling bi-directional pedestrian walkways. Transp. Res. Part Methodol. 2001, 35, 293–312. [Google Scholar] [CrossRef]
- Helbing, D.; Farkas, I.; Vicsek, T. Simulating dynamical features of escape panic. Nature 2000, 407, 487. [Google Scholar] [CrossRef] [Green Version]
- Moussaïd, M.; Perozo, N.; Garnier, S.; Helbing, D.; Theraulaz, G. The walking behaviour of pedestrian social groups and its impact on crowd dynamics. PLoS ONE 2010, 5, e10047. [Google Scholar] [CrossRef] [Green Version]
- Treuille, A.; Cooper, S.; Popović, Z. Continuum crowds. ACM Trans. Graph. (TOG) 2006, 25, 1160–1168. [Google Scholar] [CrossRef]
- Duives, D.C.; Mahmassani, H.S. Exit choice decisions during pedestrian evacuations of buildings. Transp. Res. Rec. 2012, 2316, 84–94. [Google Scholar] [CrossRef]
- Haghani, M.; Sarvi, M. Pedestrian crowd tactical-level decision making during emergency evacuations. J. Adv. Transp. 2016, 50, 1870–1895. [Google Scholar] [CrossRef]
- Lo, S.M.; Huang, H.C.; Wang, P.; Yuen, K. A game theory based exit selection model for evacuation. Fire Saf. J. 2006, 41, 364–369. [Google Scholar] [CrossRef]
- Asano, M.; Iryo, T.; Kuwahara, M. Microscopic pedestrian simulation model combined with a tactical model for route choice behaviour. Transp. Res. Part Emerg. Technol. 2010, 18, 842–855. [Google Scholar] [CrossRef]
- Nasir, M.; Lim, C.P.; Nahavandi, S.; Creighton, D. Prediction of pedestrians routes within a built environment in normal conditions. Expert Syst. Appl. 2014, 41, 4975–4988. [Google Scholar] [CrossRef]
- Wang, Z.; Oyama, Y.; Scarinci, R.; Bierlaire, M.; Geroliminis, N. Pedestrian activity schedule models: Review and promises. In Proceedings of the 18th Swiss Transport Research Conference (STRC), Monte Verita/Ascona, Switzerland, 16–18 May 2018. [Google Scholar]
- Liu, X.; Usher, J.M.; Strawderman, L. An analysis of activity scheduling behavior of airport travelers. Comput. Ind. Eng. 2014, 74, 208–218. [Google Scholar] [CrossRef]
- Danalet, A.; Tinguely, L.; de Lapparent, M.; Bierlaire, M. Location choice with longitudinal WiFi data. J. Choice Model. 2016, 18, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Beaulieu, A.; Farooq, B. A dynamic mixed logit model with agent effect for pedestrian next location choice using ubiquitous Wi-Fi network data. Int. J. Transp. Sci. Technol. 2019, 8, 280–289. [Google Scholar] [CrossRef]
- Danalet, A.; Farooq, B.; Bierlaire, M. A Bayesian approach to detect pedestrian destination-sequences from WiFi signatures. Transp. Res. Part C Emerg. Technol. 2014, 44, 146–170. [Google Scholar] [CrossRef] [Green Version]
- Borst, H.C.; Miedema, H.M.; de Vries, S.I.; Graham, J.M.; van Dongen, J.E. Relationships between street characteristics and perceived attractiveness for walking reported by elderly people. J. Environ. Psychol. 2008, 28, 353–361. [Google Scholar] [CrossRef]
- Borgers, A.; Timmermans, H. A model of pedestrian route choice and demand for retail facilities within inner-city shopping areas. Geogr. Anal. 1986, 18, 115–128. [Google Scholar] [CrossRef] [Green Version]
- Hidaka, K.; Hayakawa, K.; Nishi, T.; Usui, T.; Yamamoto, T. Generating pedestrian walking behavior considering detour and pause in the path under space-time constraints. Transp. Res. Part Emerg. Technol. 2019, 108, 115–129. [Google Scholar] [CrossRef]
- Habib, K.M.N. A random utility maximization (RUM) based dynamic activity scheduling model: Application in weekend activity scheduling. Transportation 2011, 38, 123–151. [Google Scholar] [CrossRef]
- Fan, Z.; Song, X.; Shibasaki, R. Cityspectrum: A non-negative tensor factorization approach. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Washington, DC, USA, 13–17 September 2014; pp. 213–223. [Google Scholar]
- Furletti, B.; Cintia, P.; Renso, C.; Spinsanti, L. Inferring human activities from GPS tracks. In Proceedings of the 2nd ACM SIGKDD International Workshop on Urban Computing, Chicago, IL, USA, 11–14 August 2013; pp. 1–8. [Google Scholar]
- Coni, M.; Maltinti, F.; Pinna, F.; Rassu, N.; Garau, C.; Barabino, B.; Maternini, G. On-Board Comfort of Different Age Passengers and Bus-Lane Characteristics. In International Conference on Computational Science and Its Applications; Springer: Berlin/Heidelberg, Germany, 2020; pp. 658–672. [Google Scholar]
- Kasemsuppakorn, P.; Karimi, H.A. A pedestrian network construction algorithm based on multiple GPS traces. Transp. Res. Part C Emerg. Technol. 2013, 26, 285–300. [Google Scholar] [CrossRef]
- Oyama, Y.; Hato, E. Link-based measurement model to estimate route choice parameters in urban pedestrian networks. Transp. Res. Part Emerg. Technol. 2018, 93, 62–78. [Google Scholar] [CrossRef]
- Han, T.; Zhao, J.; Li, W. Smart-Guided Pedestrian Emergency Evacuation in Slender-Shape Infrastructure with Digital Twin Simulations. Sustainability 2020, 12, 9701. [Google Scholar] [CrossRef]
- Yamamoto, K.; Kokubo, S.; Nishinari, K. Simulation for pedestrian dynamics by real-coded cellular automata (RCA). Phys. A Stat. Mech. Its Appl. 2007, 379, 654–660. [Google Scholar] [CrossRef]
- Xu, W.; Liu, L.; Zlatanova, S.; Penard, W.; Xiong, Q. A pedestrian tracking algorithm using grid-based indoor model. Autom. Constr. 2018, 92, 173–187. [Google Scholar] [CrossRef]
- Ziebart, B.D.; Ratliff, N.; Gallagher, G.; Mertz, C.; Peterson, K.; Bagnell, J.A.; Hebert, M.; Dey, A.K.; Srinivasa, S. Planning-based prediction for pedestrians. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems 2009—IROS 2009, St. Louis, MI, USA, 11–15 October 2009; pp. 3931–3936. [Google Scholar]
- Sarjala, S. Built environment determinants of pedestrians’ and bicyclists’ route choices on commute trips: Applying a new grid-based method for measuring the built environment along the route. J. Transp. Geogr. 2019, 78, 56–69. [Google Scholar] [CrossRef]
- Zhang, J. A model of time use and expenditure of pedestrians in city centers. In Pedestrian Behavior; Emerald Group Publishing Limited: Bingley, UK, 2009. [Google Scholar]
- Fukuyama, S.; Hato, E. Pedestrian velocityand direction choice problem based on probabilistic activity domain. J. City Plan. Inst. Jpn. 2016, 51, 688–694. (In Japanese) [Google Scholar]
- Yamamoto, T.; Usui, T.; Nakamura, N.; Morikawa, T. Activity-travel behavior survey at tourist attraction by BLE in comparison with GPS. In Proceedings of the Launch Workshop of NECTOR Cluster 5, Tourism and Transport: Exploration of Interdependecies, Lugano, Switzerland, 29 September–1 October 2016. [Google Scholar]
- Rauch, H.E.; Tung, F.; Striebel, C.T. Maximum likelihood estimates of linear dynamic systems. AIAA J. 1965, 3, 1445–1450. [Google Scholar] [CrossRef]
- Krajewski, R.; Bock, J.; Kloeker, L.; Eckstein, L. The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2118–2125. [Google Scholar]
- Wilson, A.M.; Hubel, T.Y.; Wilshin, S.D.; Lowe, J.C.; Lorenc, M.; Dewhirst, O.P.; Bartlam-Brooks, H.L.; Diack, R.; Bennitt, E.; Golabek, K.A.; et al. Biomechanics of predator–prey arms race in lion, zebra, cheetah and impala. Nature 2018, 554, 183–188. [Google Scholar] [CrossRef]
- Van Nostrand, C.; Sivaraman, V.; Pinjari, A.R. Analysis of long-distance vacation travel demand in the United States: A multiple discrete–continuous choice framework. Transportation 2013, 40, 151–171. [Google Scholar] [CrossRef]
- Roorda, M.J.; Miller, E.J.; Habib, K.M. Validation of TASHA: A 24-h activity scheduling microsimulation model. Transp. Res. Part A Policy Pract. 2008, 42, 360–375. [Google Scholar] [CrossRef] [Green Version]
- Goulias, K.G.; Bhat, C.R.; Pendyala, R.M.; Chen, Y.; Paleti, R.; Konduri, K.C.; Huang, G.; Hu, H.H. Simulator of activities, greenhouse emissions, networks, and travel (SimAGENT) in Southern California: Design, implementation, preliminary findings, and integration plans. In Proceedings of the 2011 IEEE Forum on Integrated and Sustainable Transportation Systems, Vienna, Austria, 29 June–1 July 2011; pp. 164–169. [Google Scholar]
- Hidaka, K.; Ohno, H.; Shiga, T. Understanding Human Mobility and Activity in Multiple Non-identifiable Statistics. In Proceedings of the 14th International Conference on Computers in Urban Planning and Urban Management, Cambridge, MA, USA, 7–10 July 2015. [Google Scholar]
- Fosgerau, M.; Frejinger, E.; Karlstrom, A. A link based network route choice model with unrestricted choice set. Transp. Res. Part B Methodol. 2013, 56, 70–80. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Name | Types | Description |
|---|---|---|---|
| 0 | Insect Exhibition Hall | Activities | Exhibits of beetles and stag beetles from around the world |
| 1 | Go-Karts Track | Attractions | Go-kart experience for kids and adults |
| 2 | Bicycle Riding | Attractions | Unique bicycle riding experience |
| 3 | Komachi Scuola | Activities | Bread and ice cream making experience |
| 4 | Nishiri (Pickles Shop) | Shopping | Japanese pickled vegetable shop |
| 5 | Anju Bakery | Shopping | Freshly baked bread shop |
| 6 | Gracia | Foods | Restaurant |
| 7 | Tango Tea House | Foods | Japanese sweets and tea cafe |
| 8 | Lookout Platform | Activities | |
| 9 | Hagoromo Juice and Soft Ice Cream | Foods | Soft serve ice cream and fresh juice bar |
| 10 | Petit Petting Zoo | Activities | Petting zoo for sheeps, goats, rabbits, and tortoises |
| 11 | Ton’s Kitchen | Foods | Restaurant |
| 12 | Seven Princess Palace | Foods | Family-friendly food court |
| 13 | INMOTION | Attractions | Experience the next generation of standing electric motorcycles |
| 14 | Wooden Play Area | Attractions | Athletic field for kids |
| 15 | Clock Tower | Activities | |
| 16 | Petting Farm | Activities | Interacting with sheep and ponies, riding ponies |
| 17 | Grass Slide | Attractions | 48 m long grass slide |
| 18 | Main Gate | Shopping | The main gate with souvenirs shop and farmer’s market |
| Variables | Name of POI | Type of POI | POI Number | Parameters | t-Values |
|---|---|---|---|---|---|
| Alternative Specific Constant (ASC) | |||||
| Lookout Platform | Activities | 8 | −0.576 | −1.97 | |
| Number of Episode | |||||
| Go-Kart Track | Attractions | 1 | −0.144 | −1.63 | |
| Gracia | Foods | 6 | 0.350 | 2.29 | |
| Hagoromo Juice and Soft Ice Cream | Foods | 9 | −0.236 | −1.94 | |
| Ton’s Kitchen | Foods | 11 | −0.153 | −1.77 | |
| Wooden Play Area | Attractions | 14 | −0.113 | −1.09 | |
| Grass Slide | Attractions | 17 | 0.176 | 1.56 | |
| 12 noon to 3 PM | |||||
| Seven Princess Palace | Foods | 12 | 0.346 | 1.67 | |
| Petting Farm | Activities | 16 | 0.576 | 2.81 | |
| After 3 PM | |||||
| Anju Bakery | Shopping | 5 | −0.691 | −1.52 | |
| Ton’s Kitchen | Foods | 11 | −1.161 | −1.77 | |
| Logarithm of the time elapsed since the measurement started (10 s unit time) | |||||
| Bicycle Riding | Attractions | 2 | −0.137 | −2.99 | |
| Nishiri | Shopping | 4 | −0.518 | −7.57 | |
| Anju Bakery | Shopping | 5 | −0.150 | −3.89 | |
| Gracia | Foods | 6 | −0.329 | −3.45 | |
| Tango Tea House | Foods | 7 | −0.177 | −2.14 | |
| Hagoromo Juice and Soft Ice Cream | Foods | 9 | −0.121 | −2.48 | |
| Seven Princess Palace | Foods | 12 | −0.102 | −2.47 | |
| Wooden Play Area | Attractions | 14 | 0.101 | 1.31 | |
| Clock Tower | Activities | 15 | −0.193 | −1.37 | |
| Grass Slide | Attractions | 17 | −0.188 | −2.42 | |
| Main Gate | Shopping | 18 | 0.301 | 5.33 | |
| Representative’s gender (Men = 1, Women = 0) | |||||
| Go-Kart Track | Attractions | 1 | 0.549 | 2.26 | |
| Petit Petting Zoo | Activities | 10 | 0.331 | 2.00 | |
| Representative’s age (in 10 years) | |||||
| Komachi Scuola | Activities | 3 | −0.848 | −6.34 | |
| Tango Tea House | Foods | 7 | −0.108 | −1.37 | |
| Seven Princess Palace | Foods | 12 | 0.231 | 4.12 | |
| INMOTION | Attractions | 13 | −0.220 | −4.55 | |
| Wooden Play Area | Attractions | 14 | −0.346 | −3.55 | |
| Clock Tower | Activities | 15 | −0.344 | −1.16 | |
| Grass Slide | Attractions | 17 | −0.243 | −2.93 | |
| Main Gate | Shopping | 18 | 0.330 | 3.78 | |
| Number of children in the group | |||||
| Go-Karts Track | Attractions | 1 | 0.264 | 2.60 | |
| Bicycle Riding | Attractions | 2 | 0.223 | 1.56 | |
| Gracia | Foods | 6 | −0.537 | −2.20 | |
| Tango Tea House | Foods | 7 | −0.315 | −1.21 | |
| Lookout Platform | Activities | 8 | −0.455 | −1.92 | |
| Ton’s Kitchen | Foods | 11 | −0.457 | −2.81 | |
| Seven Princess Palace | Foods | 12 | −0.121 | −1.44 | |
| Wooden Play Area | Attractions | 14 | 0.289 | 2.73 | |
| Petting Farm | Activities | 16 | −0.182 | −1.54 | |
| Grass Slide | Attractions | 17 | 0.370 | 2.77 | |
| Main Gate | Shopping | 18 | −0.187 | −1.59 | |
| Already visited | |||||
| Petit Petting Zoo | Activities | 10 | −0.891 | −2.53 | |
| Distance from the previous activity location (minimum number of steps) | |||||
| Common | − | − | −0.098 | −11.68 | |
| Percentage of remaining time (remaining time/total time spent) | |||||
| Bicycle Riding | Attraction | 2 | 0.636 | 1.80 | |
| Anju Bakery | Shopping | 5 | 0.329 | 1.60 | |
| Main Gate | Shopping | 18 | −3.849 | −8.48 | |
| Residents of Kyoto Prefecture | |||||
| Bicycle Riding | Attractions | 2 | −0.645 | −1.95 | |
| Gracia | Foods | 6 | −1.125 | −1.93 | |
| Variables | Name of POI | Type of POI | POI Number | Parameters | t-Values |
|---|---|---|---|---|---|
| Number of episode | |||||
| Insect Exhibition Hall | Activities | 0 | 0.313 | 1.28 | |
| INMOTION | Attractions | 13 | 0.352 | 2.74 | |
| Clock Tower | Activities | 15 | 0.778 | 1.59 | |
| Petting Farm | Activities | 16 | 0.212 | 1.50 | |
| 12 noon to 3 PM | |||||
| Ton’s Kitchen | Foods | 11 | 0.859 | 1.83 | |
| Seven Princess Palace | Foods | 12 | 1.105 | 2.34 | |
| Logarithm of the time elapsed since the measurement started (10 s unit time) | |||||
| Go-Karts Track | Attractions | 1 | 0.418 | 3.81 | |
| Bicycle Riding | Attractions | 2 | 0.272 | 2.44 | |
| Anju Bakery | Shopping | 5 | 0.232 | 2.31 | |
| Petit Petting Zoo | Activities | 10 | 0.283 | 3.86 | |
| Ton’s Kitchen | Foods | 11 | 0.224 | 1.16 | |
| Seven Princess Palace | Foods | 12 | −0.244 | −3.51 | |
| Wooden Play Area | Attractions | 14 | 0.312 | 3.24 | |
| Petting Farm | Activities | 16 | 0.173 | 1.57 | |
| Grass Slide | Attractions | 17 | 0.221 | 2.06 | |
| Main Gate | Shopping | 18 | 0.399 | 3.74 | |
| Representative’s age groups (ten−year age groups) | |||||
| Ton’s Kitchen | Foods | 11 | 0.662 | 2.81 | |
| Seven Princess Palace | Foods | 12 | 0.141 | 1.22 | |
| Number of children in the group | |||||
| Petit Petting Zoo | Activities | 10 | −0.463 | −2.12 | |
| Main Gate | Shopping | 18 | −0.156 | −1.59 | |
| Distance from the previous activity location (minimum number of steps) | |||||
| Common | − | − | 0.053 | 5.15 | |
| Variables | Name of POI | Type of POI | POI Number | Parameters | Standard Errors |
|---|---|---|---|---|---|
| Saturation parameters (POI) | |||||
| Insect Exhibition Hall | Activities | 0 | −0.984 | 0.116 | |
| Go-Karts Track | Attractions | 1 | −1.371 | 0.140 | |
| Bicycle Riding | Attractions | 2 | −0.840 | 0.121 | |
| Komachi Scuola | Activities | 3 | −0.773 | 0.083 | |
| Nishiri | Shopping | 4 | −1.075 | 0.148 | |
| Anju Bakery | Shopping | 5 | −1.041 | 0.122 | |
| Gracia | Foods | 6 | −0.667 | 0.127 | |
| Tango Tea House | Foods | 7 | −0.815 | 0.082 | |
| Lookout Platform | Activities | 8 | −0.842 | 0.115 | |
| Hagoromo Juice and Soft Ice Cream | Foods | 9 | −0.845 | 0.057 | |
| Petit Petting Zoo | Activities | 10 | −0.861 | 0.108 | |
| Ton’s Kitchen | Foods | 11 | −0.919 | 0.216 | |
| Seven Princess Palace | Foods | 12 | −0.367 | 0.087 | |
| INMOTION | Attractions | 13 | −0.993 | 0.086 | |
| Wooden Play Area | Attractions | 14 | −1.070 | 0.119 | |
| Clock Tower | Activities | 15 | −0.984 | 0.366 | |
| Petting Farm | Activities | 16 | −0.920 | 0.092 | |
| Grass Slide | Attractions | 17 | −0.616 | 0.100 | |
| Main Gate | Shopping | 18 | 0.195 | 0.169 | |
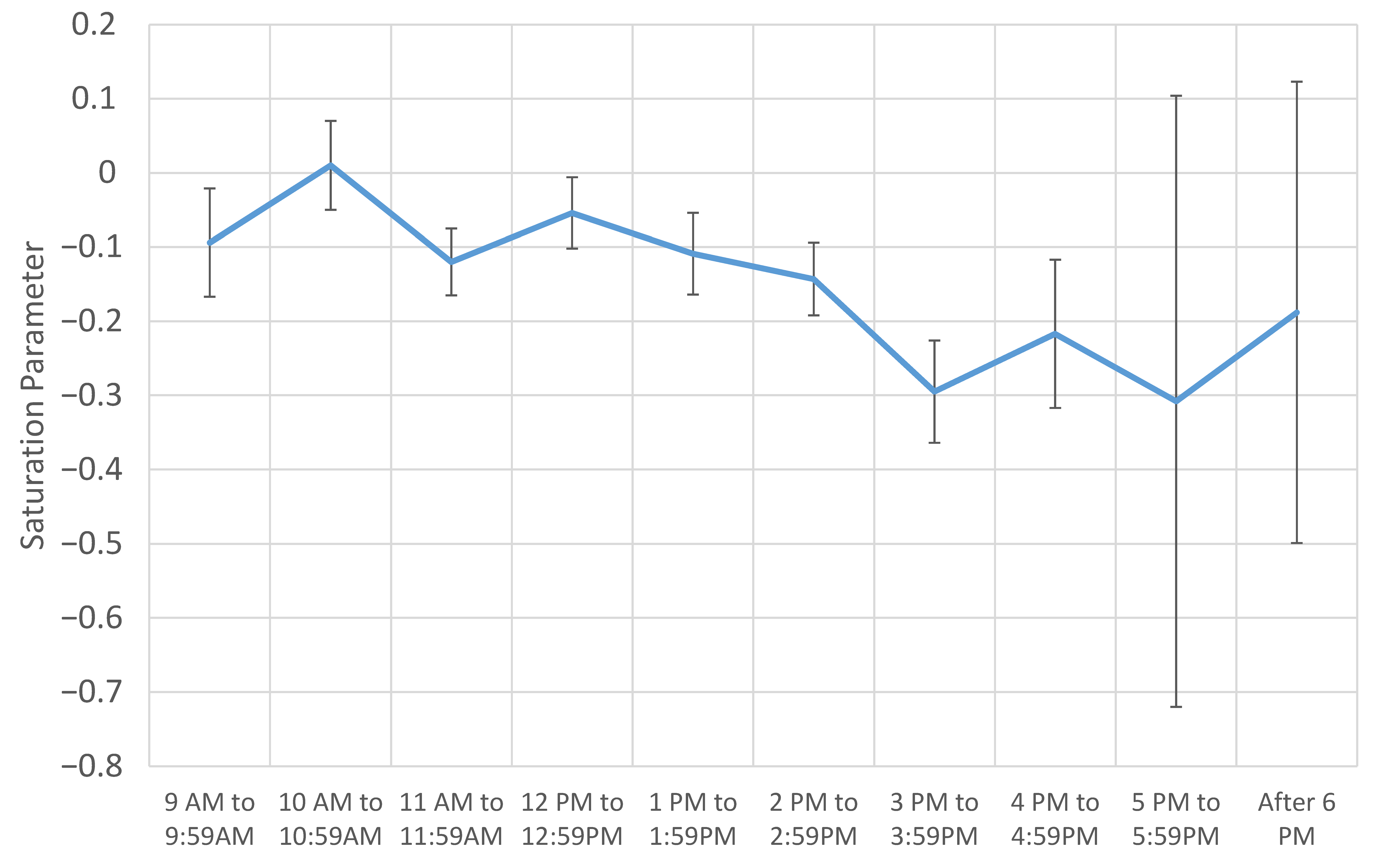
| Saturation parameters (composite goods) | |||||
| 9 AM to 9:59 AM | − | − | −0.094 | 0.073 | |
| 10 AM to 10:59 AM | − | − | 0.010 | 0.060 | |
| 11 AM to 11:59 AM | − | − | −0.120 | 0.045 | |
| 12 noon to 12:59 noon | − | − | −0.054 | 0.048 | |
| 1 PM to 1:59 PM | − | − | −0.109 | 0.055 | |
| 2 PM to 2:59 PM | − | − | −0.143 | 0.049 | |
| 3 PM to 3:59 PM | − | − | −0.295 | 0.069 | |
| 4 PM to 4:59 PM | − | − | −0.217 | 0.100 | |
| 5 PM to 5:59 PM | − | − | −0.308 | 0.412 | |
| 6 PM to 6:59 PM | − | − | −0.188 | 0.311 | |
| Scale parameter | 1.060 | 0.040 | |||
| Correlation coefficient | −0.350 | 0.062 | |||
| Log likelihood of constant−only model | −9990.16 | ||||
| Log likelihood of full model | −7489.72 | ||||
| Adjusted Rho−square value | 0.240 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hidaka, K.; Yamamoto, T. Activity Scheduling Behavior of the Visitors to an Outdoor Recreational Facility Using GPS Data. Sustainability 2021, 13, 4871. https://doi.org/10.3390/su13094871
Hidaka K, Yamamoto T. Activity Scheduling Behavior of the Visitors to an Outdoor Recreational Facility Using GPS Data. Sustainability. 2021; 13(9):4871. https://doi.org/10.3390/su13094871
Chicago/Turabian StyleHidaka, Ken, and Toshiyuki Yamamoto. 2021. "Activity Scheduling Behavior of the Visitors to an Outdoor Recreational Facility Using GPS Data" Sustainability 13, no. 9: 4871. https://doi.org/10.3390/su13094871
APA StyleHidaka, K., & Yamamoto, T. (2021). Activity Scheduling Behavior of the Visitors to an Outdoor Recreational Facility Using GPS Data. Sustainability, 13(9), 4871. https://doi.org/10.3390/su13094871