
Sustainable Aviation Electrification: A Comprehensive Review of Electric Propulsion System Architectures, Energy Management, and Control



Abstract
:1. Introduction
2. Electrified Aircraft Propulsion System Architectures
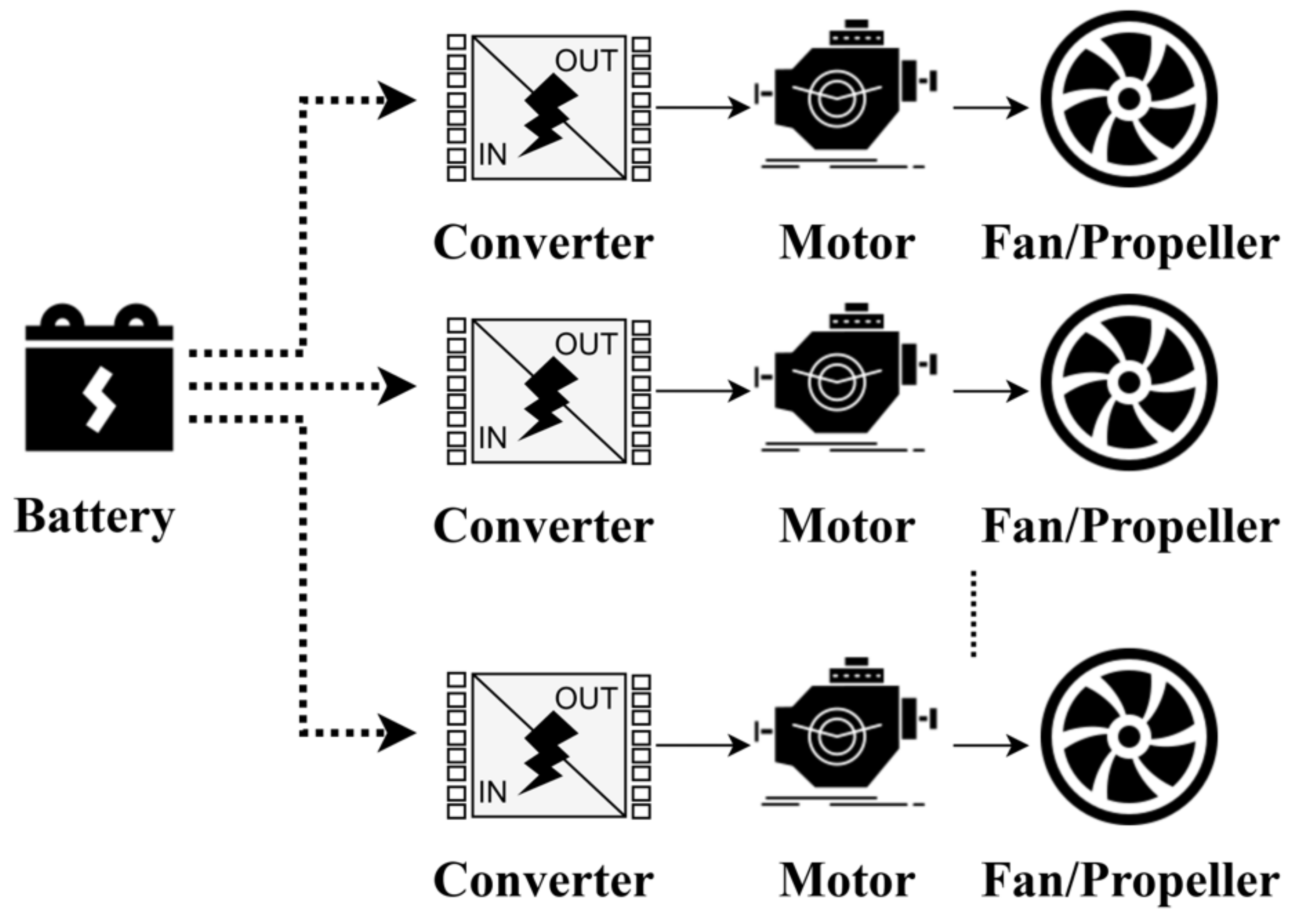
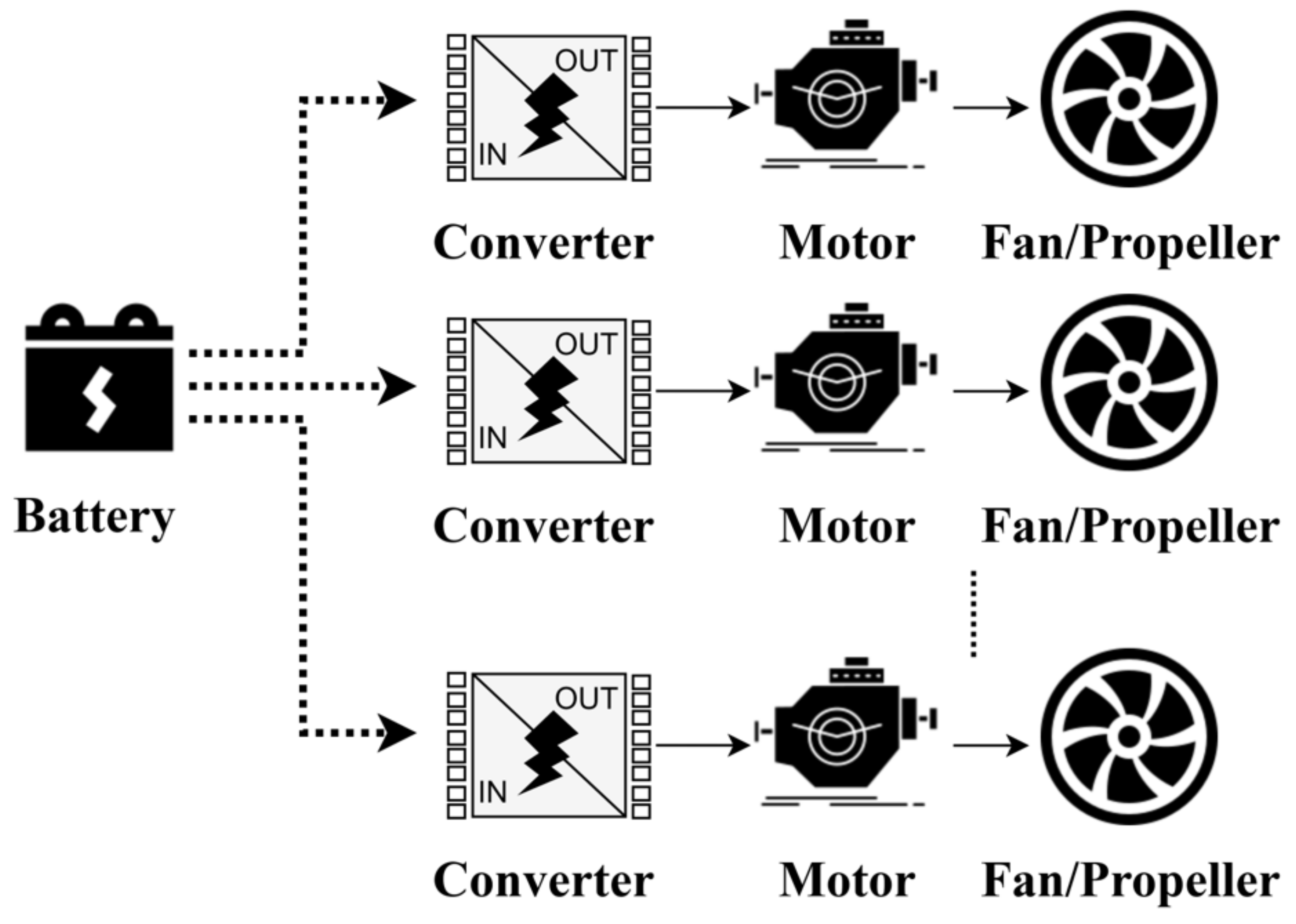
2.1. All-Electric Architecture
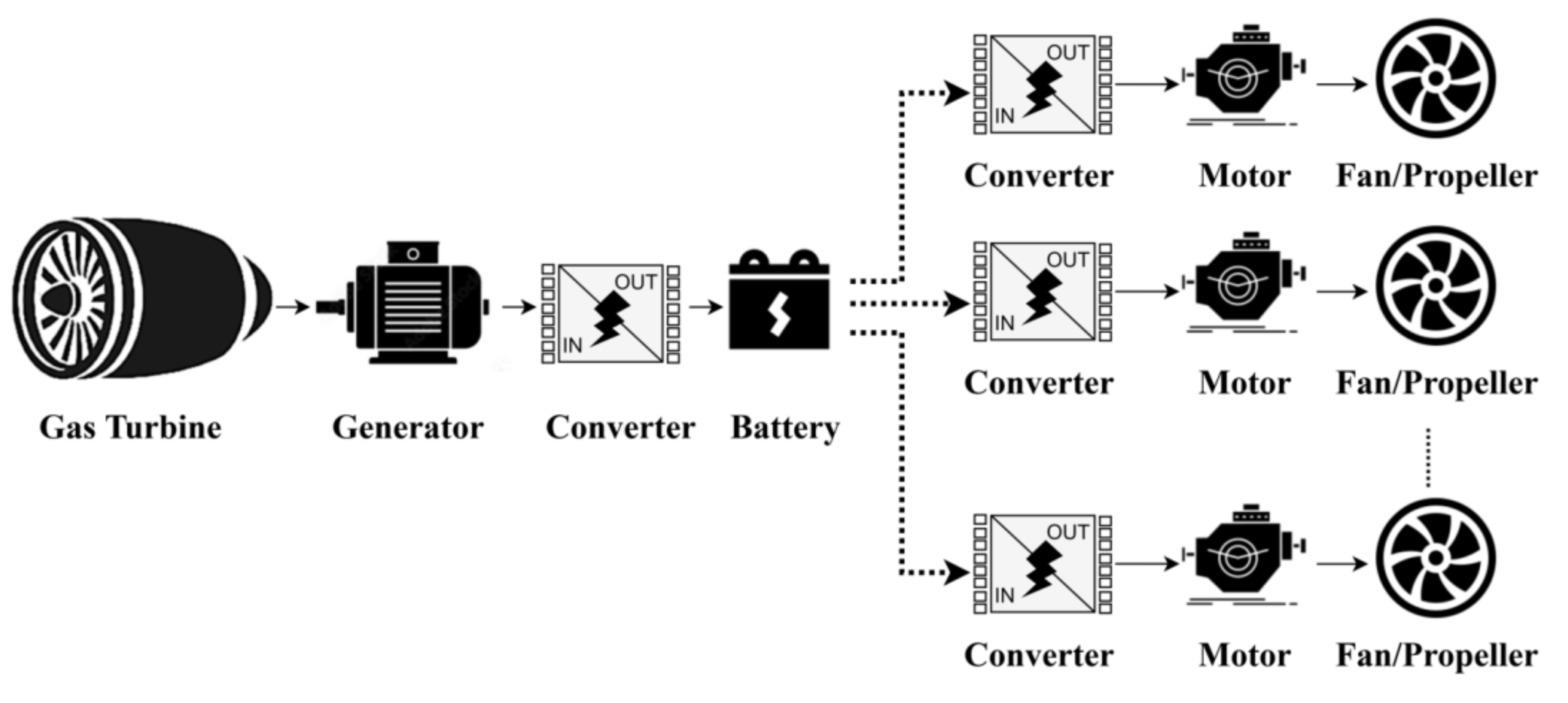
2.2. Series Hybrid Electric Architecture
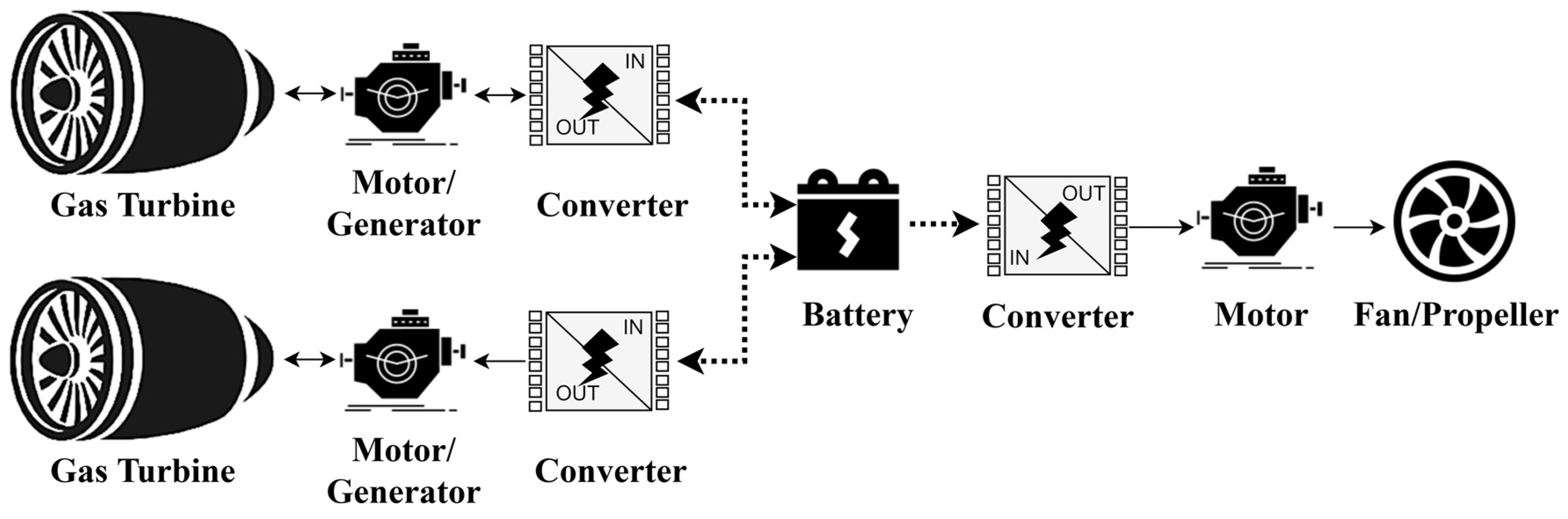
2.3. Parallel Hybrid Electric Architecture
2.4. Turboelectric Architecture
3. Electrified Aircraft Propulsion System Dynamic Modeling and Control System Design
3.1. Classical Control
3.2. Hierarchical Control
3.3. Robust Control
3.4. Optimal Control
3.5. Model Predictive Control
4. Electrified Aircraft Propulsion System Supervisory Energy Management Strategy
4.1. Rule-Based EMS
4.2. Convex Programming
4.3. Dynamic Programming
4.4. Pontryagin’s Minimum Principle
- The state and co-state should satisfy the following conditions, as represented by Equations (6)–(9):
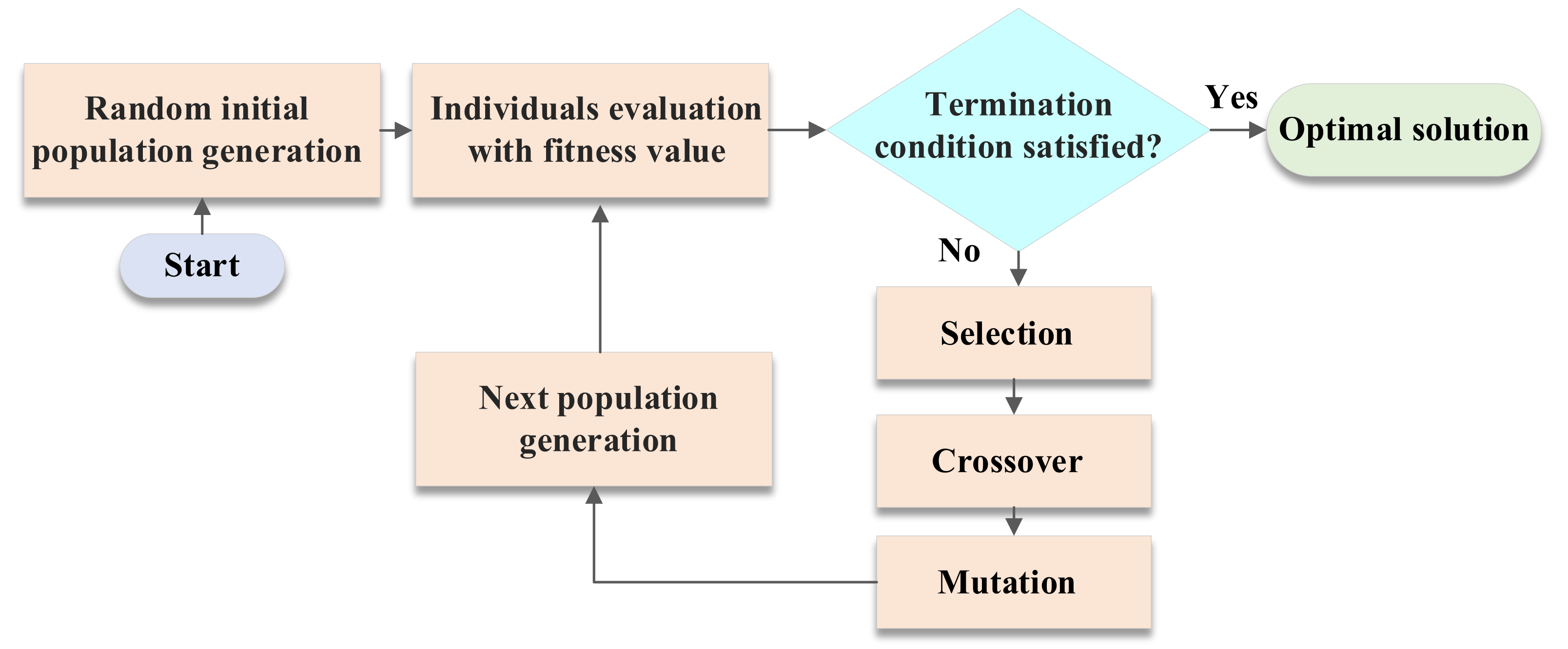
- For all , globally minimizes the Hamiltonian function:where is the set of admissible control values at time . This optimal control problem using the minimum principle is normally solved by the shooting method. This method applies an arbitrary initial value of the co-state at the beginning, , and then solves the minimization problem for the dynamic model at each time slot. The optimization procedure ends, and the optimal solutions can be obtained if the final values of the state and co-state can satisfy the terminal constraints. Otherwise, the initial value of should be changed until the solution meets all the constraints.
4.5. Metaheuristic Algorithms
4.6. Equivalent Consumption Minimization Strategy
4.7. Model Predictive Control
5. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HEA | Hybrid Electric Aircraft |
| EM | Electric Machine |
| GE | Generator |
| MTOW | Maximum Take-Off Weight |
| SE | Specific Energy |
| SP | Specific Power |
| PAX | Passenger |
| YEIS | Year of Entry Into Service |
| MIPH | Mechanically Integrated Parallel Hybrid |
| CIPH | Cycle-Integrated Parallel hybrid |
| DC | Direct Current |
| EAP | Electrified Aircraft Propulsion |
| EEC | Electronic Engine Control |
| VAFN | Variable-Area Fan Nozzle |
| VBV | Variable Bleed Valve |
| PID | Proportional Integral Derivative |
| SISO | Single Input Single Output |
| RBF | Radial Basis Function |
| PWM | Pulse Width Modulation |
| MPC | Model Predictive Control |
| LPV | Linear Parameter Varying |
| SMC | Sliding Mode Control |
| LQR | Linear Quadratic Regulator |
| LQG | Linear Quadratic Gaussian |
| LTR | Loop Transfer Recovery |
| EMSs | Energy Management Strategies |
| CP | Convex Programming |
| DP | Dynamic programming |
| PMP | Pontryagin’s Minimum Principle |
| GA | Genetic Algorithm |
| PSO | Particle Swarm Optimization |
| DEA | Differential Evolution Algorithm |
| ECMS | Equivalent Consumption Minimization Strategy |
| SHAPSO | Systematic Hybrid Aircraft Power Schedule Optimizer |
| FSM | Fuzzy State Machine |
| FLPU | Fuzzy Logic Parameter Updating |
| ADMM | Alternating Direction Method of Multipliers |
| SA | Simulated Annealing |
| ACO | Ant Colony Optimization |
| CS | Cuckoo Search |
| NSGA II | Nondominated Sorting Genetic Algorithm II |
| ABC | Artificial Bee Colony |
| GWO | Grey Wolf Optimization |
| MSA | Moth Swarm Algorithm |
| SMS-EMOA | S-Metric Selection Evolutionary Multi-Objective Algorithm |
| ALO | Ant Lion Optimizer |
| AFO | Moth Flame Optimization |
| DA | Dragonfly Algorithm |
| SCA | Sine Cosine Algorithm |
| MVO | Multi-Verse Optimizer |
| WOA | Whale Optimization Algorithm |
| UAVs | Unmanned Aerial Vehicles |
| SOH | State of Health |
| MILP | Mixed-Integer Linear Programming Algorithm |
References
- Sahoo, S.; Zhao, X.; Kyprianidis, K. A Review of Concepts, Benefits, and Challenges for Future Electrical Propulsion-Based Aircraft. Aerospace 2020, 7, 44. [Google Scholar] [CrossRef] [Green Version]
- Schwab, A.; Thomas, A.; Bennett, J.; Robertson, E.; Cary, S. Electrification of Aircraft: Challenges, Barriers, and Potential Impacts (No. NREL/TP-6A20-80220); National Renewable Energy Lab. (NREL): Golden, CO, USA, 2021. [Google Scholar]
- NASA. Strategic Implementation Plan 2017 Update, NP-2017-01-2352-HQ. 2017. Available online: https://www.nasa.gov/sites/default/files/atoms/files/sip-2017-03-23-17-high.pdf (accessed on 5 April 2022).
- Krein, A.; Williams, G. Flightpath 2050: Europe’s Vision for Aeronautics. In Innovation for Sustainable Aviation in a Global Environment: Proceedings of the Sixth European Aeronautics Days, Madrid, 30; Publications Office of the European Union: Luxembourg, 2012. [Google Scholar]
- Zaporozhets, O.; Isaienko, V.; Synylo, K. Trends on current and forecasted aircraft hybrid electric architectures and their impact on environment. Energy 2020, 211, 118814. [Google Scholar] [CrossRef] [PubMed]
- Brelje, B.J.; Martins, J.R. Electric, hybrid, and turboelectric fixed-wing aircraft: A review of concepts, models, and design approaches. Prog. Aerosp. Sci. 2019, 104, 1–19. [Google Scholar] [CrossRef]
- Pinheiro Melo, S.; Barke, A.; Cerdas, F.; Thies, C.; Mennenga, M.; Spengler, T.S.; Herrmann, C. Sustainability assessment and engineering of emerging aircraft technologies—Challenges, methods and tools. Sustainability 2020, 12, 5663. [Google Scholar] [CrossRef]
- Kozlova, M.; Nykänen, T.; Yeomans, J.S. Technical Advances in Aviation Electrification: Enhancing Strategic R&D Investment Analysis through Simulation Decomposition. Sustainability 2022, 14, 414. [Google Scholar]
- Types of Electric Propulsion. Available online: https://www.rolls-royce.com/products-and-services/electrical/propulsion.aspx (accessed on 5 April 2022).
- National Academies of Sciences, Engineering, and Medicine. Commercial Aircraft Propulsion and Energy Systems Research: Reducing Global Carbon Emissions; The National Academies Press: Washington, DC, USA, 2016. [Google Scholar]
- Fredericks, W.L.; Sripad, S.; Bower, G.C.; Viswanathan, V. Performance metrics required of next-generation batteries to electrify vertical takeoff and landing (VTOL) aircraft. ACS Energy Lett. 2018, 3, 2989–2994. [Google Scholar] [CrossRef] [Green Version]
- Kadhiresan, A.R.; Duffy, M.J. Conceptual design and mission analysis for eVTOL urban air mobility flight vehicle configurations. In AIAA Aviation 2019 Forum; American Institute of Aeronautics and Astronautics: Dallas, TX, USA, 2019; p. 2873. [Google Scholar]
- Schuh, G.; Spangenberg, M.; Zhang, Q.; Dannbeck, B.; Stuerken, J. Economic Feasibility Study of a Hybrid-Electric 19-Passenger Commuter Aircraft; Deutsche Gesellschaft für Luft-und Raumfahrt-Lilienthal-Oberth Ev: Bremen, Germany, 2021. [Google Scholar]
- Datta, A.; Johnson, W. Powerplant design and performance analysis of a manned all-electric helicopter. J. Propuls. Power 2014, 30, 490–505. [Google Scholar] [CrossRef]
- Serafini, J.; Cremaschini, M.; Bernardini, G.; Solero, L.; Ficuciello, C.; Gennaretti, M. Conceptual all-electric retrofit of helicopters: Review, technological outlook, and a sample design. IEEE Trans. Transp. Electrif. 2019, 5, 782–794. [Google Scholar] [CrossRef]
- Schäfer, A.W.; Barrett, S.R.; Doyme, K.; Dray, L.M.; Gnadt, A.R.; Self, R.; Torija, A.J. Technological, economic and environmental prospects of all-electric aircraft. Nat. Energy 2019, 4, 160–166. [Google Scholar] [CrossRef] [Green Version]
- Viswanathan, V.; Knapp, B.M. Potential for electric aircraft. Nat. Sustain. 2019, 2, 88–89. [Google Scholar] [CrossRef]
- Gnadt, A.R.; Speth, R.L.; Sabnis, J.S.; Barrett, S.R. Technical and environmental assessment of all-electric 180-passenger commercial aircraft. Prog. Aerosp. Sci. 2019, 105, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Airbus E-Fan. Available online: https://www.airbus.com/en/innovation/zero-emission/electric-flight (accessed on 5 April 2022).
- Electric Sport and Training Aircraft. Available online: https://www.rolls-royce.com/products-and-services/electrical/propulsion/light-sport-and-training-aircraft (accessed on 5 April 2022).
- Airbus Vahana. Available online: https://www.airbus.com/en/urbanairmobility/vahana (accessed on 5 April 2022).
- Boeing Aurora. Available online: https://www.aurora.aero/urban-air-mobility/ (accessed on 5 April 2022).
- Rolls-Royce ACCEL. Available online: https://www.rolls-royce.com/products-and-services/electrical/propulsion/light-sport-and-training-aircraft.aspx#accel (accessed on 5 April 2022).
- NASA X-57 Maxwell. Available online: https://www.nasa.gov/specials/X57/ (accessed on 5 April 2022).
- Eviation Alice. Available online: https://www.eviation.co/aircraft/#alice-specifications (accessed on 5 April 2022).
- Airbus CityAirbus. Available online: https://www.airbus.com/en/innovation/zero-emission/urban-air-mobility/cityairbus-nextgen (accessed on 5 April 2022).
- Wright Electric/Easy jet. Technology | Wright Electric. Available online: weflywright.com (accessed on 5 April 2022).
- CleanSky 2 Project ELICA (ELectric Innovative Commuter Aircraft). Available online: https://www.elica-cleansky-project.eu/ (accessed on 5 April 2022).
- Orefice, F.; Nicolosi, F.; Della Vecchia, P.; Ciliberti, D. Aircraft Conceptual Design of Commuter Aircraft including Distributed Electric Propulsion. In Proceedings of the AIAA Aviation 2020 Forum, Virtual Event, 15–19 June 2020; p. 2627. [Google Scholar]
- Donateo, T.; Ficarella, A.; Spedicato, L. A method to analyze and optimize hybrid electric architectures applied to unmanned aerial vehicles. Aircr. Eng. Aerosp. Technol. 2018, 90, 828–842. [Google Scholar] [CrossRef]
- Zunum Aero. Available online: https://zunum.aero/aircraft/ (accessed on 5 April 2022).
- XTI TriFan 600. Available online: https://www.xtiaircraft.com/xti-triFan-600#Diagram (accessed on 5 April 2022).
- Airbus E-Fan, X. Available online: https://www.airbus.com/en/innovation/zero-emission/electric-flight/e-fan-x (accessed on 5 April 2022).
- Kang, S.; Roumeliotis, I.; Zhang, J.; Broca, O.; Pachidis, V. Assessment of engine operability and overall performance for parallel hybrid electric propulsion systems for a single-aisle aircraft. J. Eng. Gas Turbines Power 2022, 144. [Google Scholar] [CrossRef]
- Seitz, A.; Nickl, M.; Stroh, A.; Vratny, P.C. Conceptual study of a mechanically integrated parallel hybrid electric turbofan. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 232, 2688–2712. [Google Scholar] [CrossRef]
- Zhang, J.; Roumeliotis, I.; Zolotas, A. Nonlinear Model Predictive Control-Based Optimal Energy Management for Hybrid Electric Aircraft considering Aerodynamics-Propulsion Coupling Effects. IEEE Trans. Transp. Electrif. 2021, 8, 2640–2653. [Google Scholar] [CrossRef]
- Bradley, M.K.; Droney, C.K. Subsonic Ultra Green Aircraft Research: Phase II–volume II–hybrid electric design exploration. NASA CR-218704. 2015. Available online: https://ntrs.nasa.gov/citations/20150017039 (accessed on 5 April 2022).
- Jansen, R.; Bowman, C.; Jankovsky, A.; Dyson, R.; Felder, J. Overview of NASA Electrified Aircraft Propulsion (EAP) Research for Large Subsonic Transports. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017. [Google Scholar]
- UTRC hGTF. Available online: https://www1.grc.nasa.gov/aeronautics/eap/airplane-concepts/hybrid-electric/ (accessed on 5 April 2022).
- High Power, High Scalability, Hybrid Powertrain-H3PS. Available online: https://www.rolls-royce.com/media/our-stories/discover/2020/high-power-high-scalability-hybrid-powertrain-h3ps.aspx (accessed on 5 April 2022).
- NLR Leading the Way in Developing Hybrid Aircraft. Available online: https://www.nlr.org/news/nlr-and-delft-university-of-technology-lead-the-way-in-developing-hybrid-aircraft/ (accessed on 5 April 2022).
- Vankan, W.J.; Lammen, W.F. Parallel hybrid electric propulsion architecture for single aisle aircraft-powertrain investigation. MATEC Web Conf. 2019, 304, 03008. [Google Scholar] [CrossRef]
- NASA N3-X with Turboelectric Distributed Propulsion. Available online: https://ntrs.nasa.gov/citations/20150002081 (accessed on 5 April 2022).
- Schiltgen, B.T.; Freeman, J. Aero-propulsive interaction and thermal system integration within the ECO-150: A turboelectric distributed propulsion airliner with conventional electric machines. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; p. 4064. [Google Scholar]
- ESAero ECO-150. Available online: https://www.esaero.com/eco-150-project-information (accessed on 5 April 2022).
- Overview of the NASA STARC-ABL Advanced Concept. Available online: https://ntrs.nasa.gov/citations/20170005612 (accessed on 5 April 2022).
- Subsonic Ultra Green Aircraft Research Phase II: N+4 Advanced Concept Development. Available online: https://ntrs.nasa.gov/citations/20120009038 (accessed on 5 April 2022).
- Simon, D.L.; Connolly, J.W.; Culley, D.E. Control Technology Needs for Electrified Aircraft Propulsion Systems. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2019; Volume 58677, p. V006T05A022. [Google Scholar]
- Csank, J.; May, R.; Litt, J.; Guo, T.H. Control design for a generic commercial aircraft engine. In Proceedings of the 46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Nashville, TN, USA, 25–28 July 2010; p. 6629. [Google Scholar]
- Shi, Y.; Zhao, J.; Liu, Y. Switching control for aero-engines based on switched equilibrium manifold expansion model. IEEE Trans. Ind. Electron. 2016, 64, 3156–3165. [Google Scholar] [CrossRef]
- Adibhatla, S.; Garg, S.; Griffith, S.; Karnofski, K.; Payne, N.; Wood, B. Propulsion control technology development roadmaps to address NASA aeronautics research mission goals for thrusts 3a and 4. In Proceedings of the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018; p. 4732. [Google Scholar]
- Richter, H. Advanced Control of Turbofan Engines; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Chipperfield, A.J.; Bica, B.; Fleming, P.J. Fuzzy scheduling control of a gas turbine aero-engine: A multiobjective approach. IEEE Trans. Ind. Electron. 2002, 49, 536–548. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, W.; Hu, Z. Model-Based Nonlinear Control of Aeroengines; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Jafari, S.; Nikolaidis, T. Meta-heuristic global optimization algorithms for aircraft engines modelling and controller design; A review, research challenges, and exploring the future. Prog. Aerosp. Sci. 2019, 104, 40–53. [Google Scholar] [CrossRef]
- Dunham, W.; Hencey, B.; Kolmanovsky, I.; Girard, A. Predictive propulsion and power control for large transient power loads in a more electric aircraft. In 2017 American control conference (ACC); IEEE: Piscataway, NJ, USA, 2017; pp. 4055–4061. [Google Scholar]
- Sudhoff, S.D.; Glover, S.F.; Lamm, P.T.; Schmucker, D.H.; Delisle, D.E. Admittance space stability analysis of power electronic systems. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 965–973. [Google Scholar] [CrossRef]
- Herrera, L.; Palmer, B.; Yao, X.; Tsao, B.H. Controller design of DC microgrids with multiple sources and constant power loads. In 2017 IEEE Energy Conversion Congress and Exposition (ECCE); IEEE: Piscataway, NJ, USA, 2017; pp. 2625–2630. [Google Scholar]
- Dunham, W.; Hencey, B.; Girard, A.R.; Kolmanovsky, I. Distributed model predictive control for more electric aircraft subsystems operating at multiple time scales. IEEE Trans. Control Syst. Technol. 2019, 28, 2177–2190. [Google Scholar] [CrossRef]
- Wang, J.; Cai, Y.; Chen, L.; Shi, D.; Wang, R.; Zhu, Z. Review on multi-power sources dynamic coordinated control of hybrid electric vehicle during driving mode transition process. Int. J. Energy Res. 2020, 44, 6128–6148. [Google Scholar] [CrossRef]
- Drgoňa, J. Model Predictive Control with Applications in Building Thermal Comfort Control. Ph.D. Thesis, Slovak University of Technology in Bratislava, Bratislava, Slovakia, 2017. [Google Scholar]
- Jaw, L.; Mattingly, J. Aircraft Engine Controls; American Institute of Aeronautics and Astronautics: New York, NY, USA, 2009; pp. 289–298. [Google Scholar]
- Grzedzinski Kacper, J. Inherently Robust, Adaptive Model Predictive Control: An Opportunity for Gas Turbines. Ph.D. Thesis, University of Sheffield, Sheffield, UK, 2019. [Google Scholar]
- Yinfeng, L.I.U.; Jafari, S.; Nikolaidis, T. Advanced optimization of gas turbine aero-engine transient performance using linkage-learning genetic algorithm: Part II, optimization in flight mission and controller gains correlation development. Chin. J. Aeronaut. 2021, 34, 568–588. [Google Scholar]
- Ye, Y.; Wang, Z.; Zhang, X.J.A.S. Cascade ensemble-RBF-based optimization algorithm for aero-engine transient control schedule design optimization. Aerosp. Sci. Technol. 2021, 115, 106779. [Google Scholar] [CrossRef]
- Imani, A.; Montazeri-Gh, M. Improvement of Min–Max limit protection in aircraft engine control: An LMI approach. Aerosp. Sci. Technol. 2017, 68, 214–222. [Google Scholar] [CrossRef]
- Imani, A.; Montazeri-Gh, M. A Min–Max multiregulator system with stability analysis for aeroengine propulsion control. ISA Trans. 2019, 85, 84–96. [Google Scholar] [CrossRef]
- Shuwei, P.A.N.G.; Jafari, S.; Nikolaidis, T.; Qiuhong, L.I. A novel model-based multivariable framework for aircraft gas turbine engine limit protection control. Chin. J. Aeronaut. 2021, 34, 57–72. [Google Scholar]
- Connolly, J.W.; Chapman, J.W.; Stalcup, E.J.; Hunker, K.R.; Chicatelli, A.K.; Thomas, G.L. Modeling and control design for a turboelectric single aisle aircraft propulsion system. In 2018 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS); IEEE: Piscataway, NJ, USA, 2018; pp. 1–19. [Google Scholar]
- Richter, H.; Connolly, J.W.; Simon, D.L. Optimal control and energy management for hybrid gas-electric propulsion. J. Eng. Gas Turbines Power 2020, 142, 091009. [Google Scholar] [CrossRef]
- Yamashita, D.Y.; Vechiu, I.; Gaubert, J.P. A review of hierarchical control for building microgrids. Renew. Sustain. Energy Rev. 2020, 118, 109523. [Google Scholar] [CrossRef]
- Dunham, W. Advanced Predictive Control Strategies for More Electric Aircraft. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2019. [Google Scholar]
- Sabri, Y.; El Kamoun, N.; Lakrami, F. A survey: Centralized, decentralized, and distributed control scheme in smart grid systems. In 2019 7th Mediterranean Congress of Telecommunications (CMT); IEEE: Piscataway, NJ, USA, 2019; pp. 1–11. [Google Scholar]
- Yasar, M.; Ray, A. Hierarchical control of aircraft propulsion systems: Discrete event supervisor approach. Control Eng. Pract. 2007, 15, 149–162. [Google Scholar] [CrossRef]
- Pan, M.; Wang, H.; Gu, B.; Qiu, X.; Chen, Y.H. A hierarchical robust control design with non-parallel distributed compensator and application to aircraft engines. IEEE Access 2019, 7, 144813–144825. [Google Scholar] [CrossRef]
- Koeln, J.P.; Pangborn, H.C.; Williams, M.A.; Kawamura, M.L.; Alleyne, A.G. Hierarchical control of aircraft electro-thermal systems. IEEE Trans. Control Syst. Technol. 2019, 28, 1218–1232. [Google Scholar] [CrossRef]
- Wang, W.; Koeln, J.P. Hierarchical Multi-Timescale Energy Management for Hybrid-Electric Aircraft. In Dynamic Systems and Control Conference; American Society of Mechanical Engineers: New York, NY, USA, 2020; Volume 84270, p. V001T11A002. [Google Scholar]
- Aksland, C.T.; Alleyne, A.G. Hierarchical model-based predictive controller for a hybrid UAV powertrain. Control Eng. Pract. 2021, 115, 104883. [Google Scholar] [CrossRef]
- Ge, Y.; Song, B.; Pei, Y.; Mollet, Y.; Gyselinck, J. A fuzzy logic based method for fault tolerant hierarchical load management of more electric aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 3846–3856. [Google Scholar] [CrossRef]
- Zhou, K.; Doyle, J.C. Essentials of robust control; Prentice Hall: Upper Saddle River, NJ, USA, 1998; Volume 104. [Google Scholar]
- Gou, L.; Liu, Z.; Fan, D.; Zheng, H. Aeroengine robust gain-scheduling control based on performance degradation. IEEE Access 2020, 8, 104857–104869. [Google Scholar] [CrossRef]
- Yang, D.; Zhao, J. H∞ output tracking control for a class of switched LPV systems and its application to an aero-engine model. Int. J. Robust Nonlinear Control 2017, 27, 2102–2120. [Google Scholar] [CrossRef]
- Liu, T.J.; Du, X.; Sun, X.M.; Richter, H.; Zhu, F. Robust tracking control of aero-engine rotor speed based on switched LPV model. Aerosp. Sci. Technol. 2019, 91, 382–390. [Google Scholar] [CrossRef]
- Yang, D.; Zong, G.; Karimi, H.R. H-infinity Refined Antidisturbance Control of Switched LPV Systems with Application to Aero-Engine. IEEE Trans. Ind. Electron. 2019, 67, 3180–3190. [Google Scholar] [CrossRef]
- Yang, C.; Jiao, X.; Li, L.; Zhang, Y.; Chen, Z. A robust H∞ control-based hierarchical mode transition control system for plug-in hybrid electric vehicle. Mech. Syst. Signal Process. 2018, 99, 326–344. [Google Scholar] [CrossRef]
- Kim, S.; Choi, S.B. Cooperative control of drive motor and clutch for gear shift of hybrid electric vehicles with dual-clutch transmission. IEEE/ASME Trans. Mechatron. 2020, 25, 1578–1588. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; Crc Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Du, X.; Richter, H.; Guo, Y. Multivariable sliding-mode strategy with output constraints for aeroengine propulsion control. J. Guid. Control. Dyn. 2016, 39, 1631–1642. [Google Scholar] [CrossRef]
- Liu, S.; Bai, J.; Wang, Q.; Wang, W. Tracking controller design for aero-engine based on improved multi-power reaching law of sliding mode control. Int. J. Aeronaut. Space Sci. 2019, 20, 722–731. [Google Scholar] [CrossRef]
- Gokasan, M.; Bogosyan, S.; Goering, D.J. Sliding mode based powertrain control for efficiency improvement in series hybrid-electric vehicles. IEEE Trans. Power Electron. 2006, 21, 779–790. [Google Scholar] [CrossRef] [Green Version]
- Chiang, C.J.; Chen, Y.C.; Lin, C.Y. Fuzzy sliding mode control for smooth mode changes of a parallel hybrid electric vehicle. In 11th IEEE International Conference on Control & Automation (ICCA); IEEE: Piscataway, NJ, USA, 2014; pp. 1072–1077. [Google Scholar]
- Kirk, D.E. Optimal Control Theory: An Introduction; Courier Corporation: Chelmsford, MA, USA, 2004. [Google Scholar]
- Lutambo, J.; Wang, J. Turbofan engine modelling and control design using linear quadratic regulator (LQR). Int. J. Eng. Sci 2017, 6, 49–58. [Google Scholar] [CrossRef]
- Menon, P.; Sweriduk, G.; Vaddi, S.; Parker, K. Nonlinear control of a high-performance aircraft engine. In AIAA Guidance, Navigation, and Control Conference and Exhibit; American Institute of Aeronautics and Astronautics: Keystone, CO, USA, 2006; p. 6087. [Google Scholar]
- Zhang, H.; Sun, F. Direct surge margin control for aeroengines based on improved SVR machine and LQR method. Math. Probl. Eng. 2013, 2013, 870215. [Google Scholar] [CrossRef]
- Lahaji, S.B.S. Modeling of a Hybrid-Electric System and Design of Control Laws for Hybrid-Electric Urban Air Mobility Power Plants. Master’s Thesis, Embry-Riddle Aeronautical University, Daytona Beach, FL, USA, 2021. [Google Scholar]
- Song, Q.; Wilkie, J.; Grimble, M.J. Robust controller for gas turbines based upon LQG/LTR design with self-tuning features. J. Dyn. Syst. Meas. Control 1993, 115, 569–571. [Google Scholar] [CrossRef]
- Yong, W.A.N.G.; Zhigui, X.U.; ZHANG, H. A novel control method for turboshaft engine with variable rotor speed based on the Ngdot estimator through LQG/LTR and rotor predicted torque feedforward. Chin. J. Aeronaut. 2020, 33, 1867–1876. [Google Scholar]
- Allgöwer, F.; Zheng, A. (Eds.) . Nonlinear Model Predictive Control; Birkhäuser: Basel, Switzerland, 2012; Volume 26. [Google Scholar]
- Garcia, C.E.; Prett, D.M.; Morari, M. Model predictive control: Theory and practice—A survey. Automatica 1989, 25, 335–348. [Google Scholar] [CrossRef]
- Montazeri-Gh, M.; Rasti, A.; Jafari, A.; Ehteshami, M. Design and implementation of MPC for turbofan engine control system. Aerosp. Sci. Technol. 2019, 92, 99–113. [Google Scholar] [CrossRef]
- Zhou, X.; Lu, F.; Zhou, W.; Huang, J. An improved multivariable generalized predictive control algorithm for direct performance control of gas turbine engine. Aerosp. Sci. Technol. 2020, 99, 105576. [Google Scholar] [CrossRef]
- Nikolaidis, T.; Li, Z.; Jafari, S. Advanced constraints management strategy for real-time optimization of gas turbine engine transient performance. Appl. Sci. 2019, 9, 5333. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Q.; Wang, Y.; Sun, F.; Zhang, H. Aero-engine direct thrust control with nonlinear model predictive control based on linearized deep neural network predictor. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2020, 234, 330–337. [Google Scholar] [CrossRef]
- Seok, J.; Kolmanovsky, I.; Girard, A. Integrated/coordinated control of aircraft gas turbine engine and electrical power system: Towards large electrical load handling. In 2016 IEEE 55th Conference on Decision and Control (CDC); IEEE: Piscataway, NJ, USA, 2016; pp. 3183–3189. [Google Scholar]
- Seok, J.; Kolmanovsky, I.; Girard, A. Coordinated model predictive control of aircraft gas turbine engine and power system. J. Guid. Control. Dyn. 2017, 40, 2538–2555. [Google Scholar] [CrossRef] [Green Version]
- Seok, J.; Reed, D.M.; Kolmanovsky, I.V.; Girard, A.R. Coordinated model predictive control of aircraft gas turbine engine with simplified electrical system model. In 2018 Annual American Control Conference (ACC); IEEE: Piscataway, NJ, USA, 2018; pp. 1460–1466. [Google Scholar]
- Martinez, C.M.; Hu, X.; Cao, D.; Velenis, E.; Gao, B.; Wellers, M. Energy management in plug-in hybrid electric vehicles: Recent progress and a connected vehicles perspective. IEEE Trans. Veh. Technol. 2016, 66, 4534–4549. [Google Scholar] [CrossRef] [Green Version]
- Olatomiwa, L.; Mekhilef, S.; Ismail, M.S.; Moghavvemi, M. Energy management strategies in hybrid renewable energy systems: A review. Renew. Sustain. Energy Rev. 2016, 62, 821–835. [Google Scholar] [CrossRef]
- Silva, H.L.; Guimarães, T.A. Conceptual Design of a Thin-Haul Aircraft by Energy Sizing Optimization Including Aero-Propulsive Interactions. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 1503. [Google Scholar]
- Perullo, C.; Mavris, D. A review of hybrid-electric energy management and its inclusion in vehicle sizing. Aircr. Eng. Aerosp. Technol. 2014, 86, 550–557. [Google Scholar] [CrossRef]
- Riboldi, C.E. Energy-optimal off-design power management for hybrid-electric aircraft. Aerosp. Sci. Technol. 2019, 95, 105507. [Google Scholar] [CrossRef]
- Onori, S.; Serrao, L.; Rizzoni, G. Hybrid Electric Vehicles: Energy Management Strategies; Springer: London, UK, 2016. [Google Scholar]
- Donateo, T.; Ficarella, A. A modeling approach for the effect of battery aging on the performance of a hybrid electric rotorcraft for urban air-mobility. Aerospace 2020, 7, 56. [Google Scholar] [CrossRef]
- Friedrich, C.; Robertson, P.A. Hybrid-electric propulsion for aircraft. J. Aircr. 2015, 52, 176–189. [Google Scholar] [CrossRef]
- Trawick, D.; Milios, K.; Gladin, J.C.; Mavris, D.N. A Method for Determining Optimal Power Management Schedules for Hybrid Electric Airplanes. In 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS); IEEE: Piscataway, NJ, USA, 2019; pp. 1–21. [Google Scholar]
- Zhang, X.; Liu, L.; Dai, Y. Fuzzy state machine energy management strategy for hybrid electric UAVs with PV/fuel cell/battery power system. Int. J. Aerosp. Eng. 2018, 2018, 2852941. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Gu, C.; Zhao, P.; Cheng, S. A novel hybrid propulsion system configuration and power distribution strategy for light electric aircraft. Energy Convers. Manag. 2021, 238, 114171. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Z.; Benedikter, B.; Zavoli, A. A Convex Approach to Multi-phase Trajectory Optimization of eVTOL Vehicles for Urban Air Mobility. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 2159. [Google Scholar]
- Boyd, S.; Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Doff-Sotta, M.; Cannon, M.; Bacic, M. Optimal energy management for hybrid electric aircraft. IFAC-Pap. 2020, 53, 6043–6049. [Google Scholar] [CrossRef]
- Salehpour, M.J.; Zarenia, O.; Hosseini Rostami, S.M.; Wang, J.; Lim, S.J. Convex multi-objective optimization for a hybrid fuel cell power system of more electric aircraft. Int. Trans. Electr. Energy Syst. 2020, 30, e12427. [Google Scholar] [CrossRef]
- Doff-Sotta, M.; Cannon, M.; Bacic, M. Predictive energy management for hybrid electric aircraft propulsion systems. arXiv 2021, arXiv:2103.07909. [Google Scholar]
- Larsson, V.; Johannesson, L.; Egardt, B. Analytic solutions to the dynamic programming subproblem in hybrid vehicle energy management. IEEE Trans. Veh. Technol. 2014, 64, 1458–1467. [Google Scholar] [CrossRef]
- Bellman, R.E.; Dreyfus, S.E. Applied Dynamic Programming; Princeton university press: Princeton, NJ, USA, 2015. [Google Scholar]
- Bongermino, E.; Tomaselli, M.; Monopoli, V.G.; Rizzello, G.; Cupertino, F.; Naso, D. Hybrid aeronautical propulsion: Control and energy management. IFAC-Pap. 2017, 50, 169–174. [Google Scholar] [CrossRef]
- Donateo, T.; Ficarella, A.; Spedicato, L. Applying dynamic programming algorithms to the energy management of hybrid electric aircraft. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2018; Volume 51043, p. V003T06A015. [Google Scholar]
- Donateo, T.; De Pascalis, C.L.; Strafella, L.; Ficarella, A. Off-line and on-line optimization of the energy management strategy in a Hybrid Electric Helicopter for urban air-mobility. Aerosp. Sci. Technol. 2021, 113, 106677. [Google Scholar] [CrossRef]
- Leite, J.P.S.P.; Voskuijl, M. Optimal energy management for hybrid-electric aircraft. Aircr. Eng. Aerosp. Technol. 2020, 92, 851–861. [Google Scholar] [CrossRef]
- Hou, C.; Ouyang, M.; Xu, L.; Wang, H. Approximate Pontryagin’s minimum principle applied to the energy management of plug-in hybrid electric vehicles. Appl. Energy 2014, 115, 174–189. [Google Scholar] [CrossRef]
- Nguyen, B.H.; German, R.; Trovão, J.P.F.; Bouscayrol, A. Real-time energy management of battery/supercapacitor electric vehicles based on an adaptation of Pontryagin’s minimum principle. IEEE Trans. Veh. Technol. 2018, 68, 203–212. [Google Scholar] [CrossRef] [Green Version]
- Kim, N.; Cha, S.; Peng, H. Optimal control of hybrid electric vehicles based on Pontryagin’s minimum principle. IEEE Trans. Control Syst. Technol. 2010, 19, 1279–1287. [Google Scholar]
- Xie, S.; Hu, X.; Xin, Z.; Brighton, J. Pontryagin’s minimum principle based model predictive control of energy management for a plug-in hybrid electric bus. Appl. Energy 2019, 236, 893–905. [Google Scholar] [CrossRef] [Green Version]
- Nguyễn, B.H.; Vo-Duy, T.; Ta, M.C.; Trovão, J.P.F. Optimal Energy Management of Hybrid Storage Systems Using an Alternative Approach of Pontryagin’s Minimum Principle. IEEE Trans. Transp. Electrification 2021, 7, 2224–2237. [Google Scholar] [CrossRef]
- Misley, A.A.; D’Arpino, M.; Ramesh, P.; Canova, M. A real-time energy management strategy for hybrid electric aircraft propulsion systems. In Proceedings of the AIAA Propulsion and Energy 2021 Forum, Virtual Event, 9–11 August 2021; p. 3283. [Google Scholar]
- Clerc, M. Particle Swarm Optimization; John Wiley & Sons: Hoboken, NJ, USA, 2010; Volume 93. [Google Scholar]
- Wu, J.; Zhang, C.H.; Cui, N.X. PSO algorithm-based parameter optimization for HEV powertrain and its control strategy. Int. J. Automot. Technol. 2008, 9, 53–59. [Google Scholar] [CrossRef]
- Montazeri-Gh, M.; Poursamad, A.; Ghalichi, B. Application of genetic algorithm for optimization of control strategy in parallel hybrid electric vehicles. J. Frankl. Inst. 2006, 343, 420–435. [Google Scholar] [CrossRef]
- Yang, X.S. Optimization algorithms. In Computational Optimization, Methods and Algorithms; Springer: Berlin, Heidelberg, 2011; pp. 13–31. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Ramadan, H.S.; Becherif, M. Metaheuristic-based energy management strategies for fuel cell emergency power unit in electrical aircraft. Int. J. Hydrog. Energy 2019, 44, 2390–2406. [Google Scholar] [CrossRef]
- Donateo, T.; De Pascalis, C.L.; Ficarella, A. Synergy effects in electric and hybrid electric aircraft. Aerospace 2019, 6, 32. [Google Scholar] [CrossRef] [Green Version]
- Rendón, M.A.; Gallo, J.; Xiong, N.; Hallak, P.H.; Oliveira, N.L.; Benito, Y.R.; Afonso, J.M. Using Dfferential Evolution Techniques for Management of a Hybrid-Electric Propulsion System. In Proceedings of the Congresso Brasileiro de Automática-CBA, Porto Alegre, Brazil, 23 November 2020; Volume 2. [Google Scholar]
- Çınar, H.; Kandemir, I. Active energy management based on meta-heuristic algorithms of fuel cell/battery/supercapacitor energy storage system for aircraft. Aerospace 2021, 8, 85. [Google Scholar] [CrossRef]
- Zhang, J.; Roumeliotis, I.; Zolotas, A. Model-based fully coupled propulsion-aerodynamics optimization for hybrid electric aircraft energy management strategy. Energy 2022, 245, 123239. [Google Scholar] [CrossRef]
- Paganelli, G.; Delprat, S.; Guerra, T.M.; Rimaux, J.; Santin, J.J. Equivalent consumption minimization strategy for parallel hybrid powertrains. In Vehicular Technology Conference. IEEE 55th Vehicular Technology Conference. VTC Spring 2002 (cat. No. 02CH37367); IEEE: Piscataway, NJ, USA, 2002; Volume 4, pp. 2076–2081. [Google Scholar]
- Xie, Y.; Savvaris, A.; Tsourdos, A. Fuzzy logic based equivalent consumption optimization of a hybrid electric propulsion system for unmanned aerial vehicles. Aerosp. Sci. Technol. 2019, 85, 13–23. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Atkin, J.; Bazmohammadi, N.; Bozhko, S.; Guerrero, J.M. Optimal Load and Energy Management of Aircraft Microgrids Using Multi-Objective Model Predictive Control. Sustainability 2021, 13, 13907. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Category | Technical Specification | Key Findings |
|---|---|---|---|
| Airbus E-Fan [19] | Two-seat electric aircraft for pilot training. Endurance: 60 min; first flight year: 2014 | Battery: Li-ion, 207 Wh/kg EM power: 30 kW | Two electric motors via eight-blade ducted fans, each producing a thrust of 0.75 kN. |
| Magnus eFusion [20] | Two-seat training aircraft with light aerobatic capabilities, serving as flying testbed for the sub-100 kW electric propulsion system. First flight year: 2016. | Propulsion system: RRP70D EM: continuous power 70 kW | |
| Siemens Extra 330 LE [20] | Two-seat aerobatic aircraft as a flying testbed for motors in the class of 0.25 to 0.5 MW. First flight year: 2016 | Propulsion system: RRP 260D EM power: 260 kW EM power density: 5.2 kW/kg | |
| Airbus Vahana [21] | Single-seat eVTOL. Range: 50 km; first flight year: 2019 | EM power: 8 × 45 kW Batteries: 38 kWh | All-electric propulsion system for a tilt-wing aircraft configuration; flight testing culmination time: 12 hrs, totaling 500 nmi. |
| Boeing Aurora [22] | 2 PAX eVTOL. Target YEIS: 2020 | 21 ft long with a 36 ft wingspan, 12 independent lift fans. | |
| Rolls-Royce/YASA ACCEL Project [23] | Single-passenger light sport and training aircraft. Range: 200 miles; first flight year: 2020 | Developing the world’s fastest electric aircraft, expected to reach 480 km/h. | |
| NASA X-57 Maxwell [24] | Two-seat Tecnam P2006T general aviation aircraft. Maximum operational altitude: 14,000 ft; cruise speed: 172 mph; first flight year: 2020 | Aircraft weight: 3000 lb Batteries: Li-ion, 69.1 kWh Power distribution: 460 V | 14 motors and propellers (two large cruise motors and propellers and 12 small high-lift motors and propellers located across the wing to increase airflow). |
| EVIATION ALICE [25] | 9 PAX commuter aircraft. Range: 440 nmi; maximum cruise speed: 250 kts; maximum payload: 2500 lbs; target YEIS: 2021 | MTOW: 16,500 lbs Propulsion: magni650 Max Power: 2 × 640 kW | |
| Airbus CityAirbus [26] | Four-seat eVTOL. Range: 80 km; cruise speed: 120 km/h; target YEIS: 2023 | MTOW: 2200 kg Propulsion system: RRP200D EM power: 8 × 200 kW EM torque density: 30 Nm/kg | A fixed wing with V-shaped tail; eight electric-powered propellers with distributed propulsion system. |
| Wright Electric/Easy Jet [27] | 100 PAX large commercial aircraft on the platform of BAe 146. Endurance: 1 h; target YEIS: 2026 | EM power: 2 MW EM SP: 10 kW/kg Inverter power: 2 MW Inverter frequency: 300 kHz Inverter volume density: 20 kW/L | 10 × 2 MW motors totaling 20 MW, as powerful as an A320 Airbus aircraft. |
| Rolls-Royce/Siemens CleanSky 2 ELICA [28,29] | 19 PAX commuter aircraft. Target YEIS: 2060 | Battery SE: 500 Wh/kg Battery SP: 1 kW/kg EM SP: 7.7 kW/kg | All-electric concept with 16 distributed propellers for design range of 200 nmi and 400 nmi. |
| Aviation Sector | EM Power Capacity | EM Specific Power | Battery Specific Energy |
|---|---|---|---|
| General aviation | Motor: <1 MW | Motor: >6.5 kW/kg | >400 Wh/kg |
| Regional/single-aisle | Motor: 1–11 MW | Motor: >6.5 kW/kg | >1800 Wh/kg |
| Twin-aisle | Not feasible | Not feasible | Not feasible |
| Study | Category | Technical Specification | Key Findings |
|---|---|---|---|
| Zunum Aero [31] | Seat capacity: 12 economy, 9 premium, 6 executives; max payload: 2500 lbs; range: 700 nmi; target YEIS: 2020 | Propulsion system: series hybrid with range extender Max power: 1 MW Turbogenerator: 500 kW | Emissions: 0.0 to 0.3 lbs CO2/ASM Operating cost: 8 cents/seat mile, USD 250 per hour. |
| XTI TriFan 600 [32] | 6-seat fixed-wing aircraft with VTOL. Range: 600 nmi in VTOL, 900 nmi for conventional take-off and landing; YEIS: 2024 | Propulsion system: a turboshaft engine driving 3 generators for electrical energy generation, powering motors which are mechanically connected to propellers | Three ducted fans, hybrid energy system (hydrogen fuel cell, sustainable aviation fuel compatible). |
| Airbus E-Fan X [33] | 100-seat regional jet. Payload: 6650 kg; YEIS: 2030 | Motor power: 2 MW Generator power: 2.5 MW EM power density: 10 kW/kg Power distribution: 3 kV DC | One of the four jet engines (AE2100) was replaced by a 2 MW electric motor. |
| Study | Category | Technical Specification | Key Findings |
|---|---|---|---|
| NASA Boeing SUGAR Volt [37,38] | 150 PAX single-aisle aircraft. Range: 900 nmi | Battery SE: 750 Wh/kg EM SP: 3–5 kW/kg EM efficiency: 93% EM power capacity: 1.3 MW (balanced), 5.3 MW (core shutdown) | Transonic truss-braced wing, ‘balanced’ version: reduces fuel burn by 60% and energy use by 54%. ‘Core shutdown’ version: EM for cruise on 100% electric power, reduces fuel burn by 64% and energy use by 46%. |
| NASA UTRC hGTF [38,39] | 150 PAX single-aisle aircraft. Range: 900 nmi | EM power capacity: 2.1 MW Battery SE: 1000 Wh/kg | Optimized geared turbofan engine for cruise, electric power boosting for take-off and climb; 7–9% block fuel burn reduction and 3–5% energy saving. |
| NASA R-R LibertyWorks EVE [39,40] | 150 PAX single-aisle aircraft, exploring mission optimization using battery power for taxiing, idle decent, and take-off power augmentation | EM power capacity: 1 MW-2.6 MW | 28% fuel burn reduction for 900 nmi mission, 10% energy saving for 500 nmi mission, 18% reduction in total fleet fuel usage. |
| Horizon 2020 H3PS (High-Power High-Scalability Aircraft Hybrid Powertrain) [40] | 4-seat general aviation aircraft developed on the platform of Tecnam P2010 | Engine: Rotax 915 (141 hp) EM power capacity: 30 kW (thrust booster motor during take-off and climb, operating as a generator to recharge batteries during cruise) | TECNAM: airframe and system integration, BRP-ROTAX: design and integration of combustion engine and e-motor, ROLLS-ROYCE: e-motor and power storage. |
| Clean Sky 2 NOVAIR project [41,42] | 150 PAX single-aisle large passenger aircraft (retrofitted on A320 NEO). Range: 800 nmi | Technology level: 2040+ Battery efficiency: 95.0% Battery SE: 1 kWh/kg EM efficiency: 98.0% EM SP: 15.0 kW/kg | With downscaled, more efficient turbofan engine core, potential trip fuel reduction is about 14%. |
| Aviation Sector | EM Power Capacity | EM Specific Power | Battery Specific Energy |
|---|---|---|---|
| General aviation | Motor: <1 MW | Motor: >3 kW/kg | >250 Wh/kg |
| Regional/single-aisle | Motor: 1–6 MW | Motor: >3 kW/kg | >800 Wh/kg |
| Twin-aisle | Not studied | Not studied | Not studied |
| Study | Category | Technical Specification | Key Findings |
|---|---|---|---|
| NASA N3-X [38,43] | 300 PAX hybrid wing body with fully distributed propulsion, 16-aft motor-driven fans. Range: 7500 nmi | Superconducting electric machines and power distribution. Power distribution: 7500 V Fully distributed power: 50 MW | 70% fuel burn reduction compared to Boeing 777–200 LR. |
| Empirical Systems Aerospace ECO-150 R [38,44,45] | 150 PAX regional jet, fully distributed propulsion system with a split-wing concept. Maximum payload range: 1500 nmi | Superconducting electrical machines cooled with liquid hydrogen | 16-wing motor-driven fans. |
| NASA STARC-ABL [38,46] | 154 PAX single-aisle aircraft with tube and wing airframe. Range: 900 nmi; target YEIS: 2035 | EM SP: 8 hp/lb EM efficiency: 96% Inverter SP: 10 hp/lb Inverter efficiency: 98% Power distribution: 1000 V Motor power capacity: 2.6 MW | 12% reduction in start of cruise TSFC, 9% reduction in economic mission block fuel, 15% reduction in design mission block fuel. |
| Boeing SUGAR Freeze [38,47] | 154 PAX single-aisle aircraft using a truss-braced wing combined with boundary-layer ingestion. Range: 900 nmi | Solid oxide fuel cell, superconducting motor, cryogenic power management system | 56% reduction in fuel burn. |
| Aviation Sector | EM Power Capacity | EM Specific Power | Battery Specific Energy |
|---|---|---|---|
| General aviation | Motor and generator: <1 MW | Motor and generator: >6.5 kW/kg | NA |
| Regional/single-aisle | Motor: 1.5–3 MW Generator: 1–11 MW | Motor and generator: >6.5 kW/kg | NA |
| Twin-aisle | Motor: 4 MW Generator: 30 MW | Motor and generator: >10 kW/kg | NA |
| Control System | Performance Requirements |
|---|---|
| Setpoint control | Regulate the gas turbine performance near a desired operating condition, e.g., idle, take-off, cruise |
| Transient control | Transient operation (performance variables change with time) |
| Limit protection | Physical limits: shaft speed, turbine blade maximum temperature, maximum combustion pressure, surge/stall of compressor |
| Methodology | Benefits and Limitations | Applications |
|---|---|---|
| Classical Control PID controller | Simple implementation in practice with relative efficiency. Only applied in single-input–single-output (SISO) systems, requires the system model to be linear-time-invariant (LTI), cannot incorporate constraints, and lacks overall performance optimization. | Conventional propulsion system: [49,52,55,64,65,66,67,68] Electrified propulsion system: [69,70] |
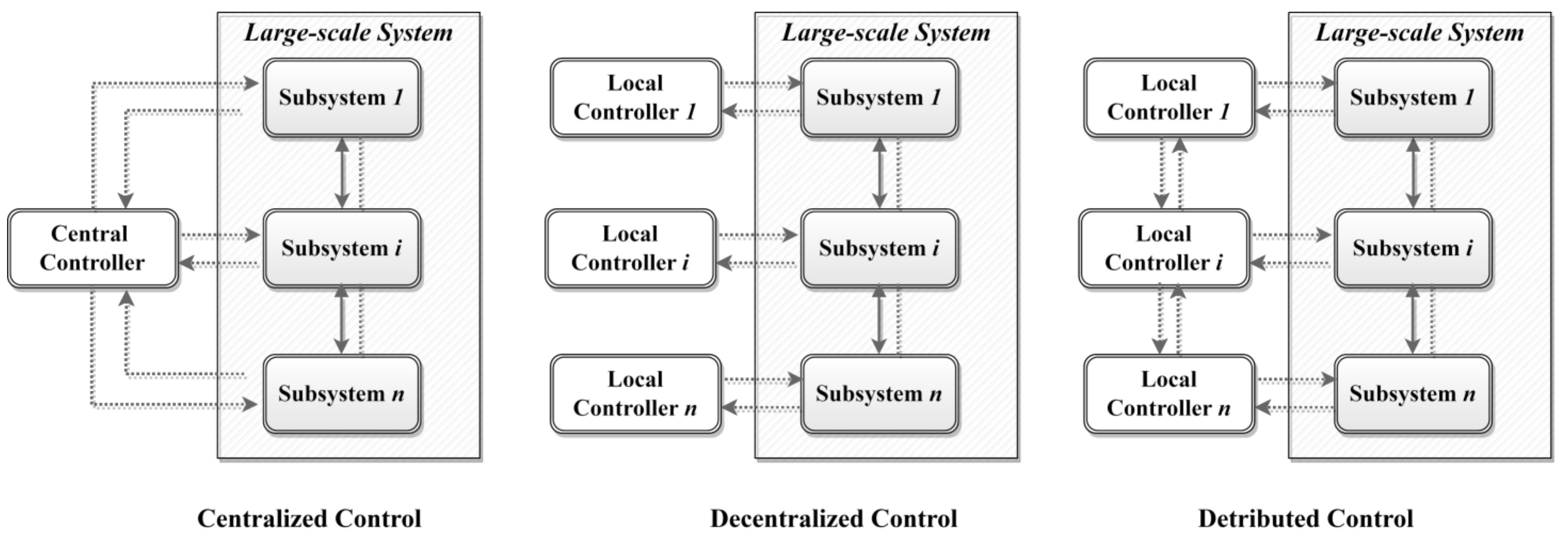
| Hierarchical Control Centralized control, decentralized control, distributed control | A form of networked control system; a computationally efficient approach for multidomain, multi-timescale system dynamics; decomposes a complicated control problem into different time-based modules and, in turn, organizes them into layers. | Conventional propulsion system: [74,75,76] Electrified propulsion system: [77,78,79] |
| Robust Control H-infinity, sliding mode control | Explicitly deals with bounded system uncertainty and disturbances. Decouples the overall system motion into independent partial subsystems of lower dimension and consequently reduces the complexity of feedback design. | Conventional propulsion system: [81,82,83,84,87,88,89] Electrified propulsion system: [85,86,90,91] |
| Optimal Control LQR, LQG, H2 | Determines the control signals of a dynamic system to satisfy the physical constraints whilst minimizing the cost function. | Conventional propulsion system: [93,94,95,97,98] Electrified propulsion system: [96] |
| Model Predictive Control | Flexible nonlinearity and constraint handling; closed-loop stability cannot be guaranteed; poor robustness. | Conventional propulsion system: [101,102,103,104] Electrified propulsion system: [59,105,106,107] |
| Classical Control Theory | Advanced Control Theory | |
|---|---|---|
| Domain | Frequency, S-domain | Time domain |
| Model representation | Transfer function | State-space |
| Continuity | Continuous | Continuous, discrete, hybrid |
| Linearity | Linear | Linear, nonlinear |
| Time variance | Time-invariant | Time-variant |
| Dimensions | Single input, single output | Multiple input, multiple output |
| Determinism | Deterministic | Deterministic, stochastic |
| Implementation | Cheap, easy | Expensive, complex |
| Methodologies | Advantages | Disadvantages |
|---|---|---|
| Rule-Based EMS Deterministic rule-based EMS, fuzzy rule-based EMS. | Easy to implement, low computational load. | Aircraft performance is determined by predefined rules; highly dependent on designers’ expertise; highly sensitive to flight mission profile. |
| Global Optimization EMS Convex programming (CP), dynamic programming (DP), Pontryagin’s minimum principle (PMP); metaheuristic algorithms: genetic algorithm (GA), particle swarm optimization (PSO), differential evolution algorithm (DEA). | Provide a globally optimal solution (all); stochastic solution generation to avoid local optima (metaheuristic algorithms). | Analytical methods are frequently not applicable for complicated problems with complex constraints (PMP); strong model simplification (CP, DP); require a planned flight mission profile as a priori knowledge (DP, metaheuristic algorithms); high computation effort (metaheuristic algorithms). |
| Instantaneous Optimization EMS Equivalent consumption minimization strategy (ECMS), model predictive control (MPC). | Easy to implement (ECMS); reduced computation load; allow the current timeslot to be optimized while keeping account of future timeslots; handle many system constraints simultaneously; applicable to a multivariable problem (energy balance of multiple sources of energy); applicable to a multiobjective optimization problem (MPC). | Achieves optimal instantaneous equivalent fuel consumption but cannot guarantee the optimal aircraft performance at mission level (ECMS); highly sensitive to flight mission profile (ECMS); single-objective optimization, cannot be expanded to operating costs, emissions, etc. (ECMS). |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Roumeliotis, I.; Zolotas, A. Sustainable Aviation Electrification: A Comprehensive Review of Electric Propulsion System Architectures, Energy Management, and Control. Sustainability 2022, 14, 5880. https://doi.org/10.3390/su14105880
Zhang J, Roumeliotis I, Zolotas A. Sustainable Aviation Electrification: A Comprehensive Review of Electric Propulsion System Architectures, Energy Management, and Control. Sustainability. 2022; 14(10):5880. https://doi.org/10.3390/su14105880
Chicago/Turabian StyleZhang, Jinning, Ioannis Roumeliotis, and Argyrios Zolotas. 2022. "Sustainable Aviation Electrification: A Comprehensive Review of Electric Propulsion System Architectures, Energy Management, and Control" Sustainability 14, no. 10: 5880. https://doi.org/10.3390/su14105880