1. Introduction
Pavement raveling is one of the leading causes of failure of porous pavement, such as open-graded friction course (OGFC), since the porous nature of the pavement means smaller contact areas among the aggregates. OGFC is widely used in the southern states [
1], such as Georgia, to reduce water spray and hydroplaning during rainy conditions. For example, OGFC is used on the entire interstate asphalt pavement system in the state of Georgia. Since raveling is one of the predominant pavement distresses affecting OGCF pavements, monitoring raveling conditions and applying appropriate treatments at the optimal timing to prolong the pavement surface life span is an important problem to address. The current raveling survey method generally categorizes the raveling severity into three levels, such as those used by the Georgia Department of Transportation (GDOT), which classifies raveling by Severity Levels 1–3 [
2]. Similarly, the Florida Department of Transportation (FDOT), Oregon Department of Transportation (ODOT), and Texas Department of Transportation (TxDOT) use severity levels of light, moderate, and severe [
3,
4,
5]. These classification methods only provide a qualitative measure of the raveling condition and might be subjective from rater to rater. Using these survey methods, raveling conditions can stay at the same severity level for many years before moving to the next level, making the forecast of raveling using these measurements a difficult task to perform. The current raveling rating system lacks granularity to differentiate different percentages of loss aggregate (raveling), which is important for making adequate decisions on determining the right pavement preservation methods, such as fog seal (to prolong the pavement long) and micro-milling and thin overlay [
6,
7]. Based on a previous study, fog seal was shown to be most effective for certain percentages of loss aggregates at Severity Level 1 [
8]. However, the current qualitative severity levels are unable to provide the required granularity to maximize the effectiveness of fog seal. In addition, the qualitative measurement is also difficult to support forecasting. Therefore, there is an urgent need to develop a quantitative raveling condition measurement method to support the determination of the right treatment and the most effective condition forecasting.
The advancements in 3D pavement technology provide a great opportunity to quantitively assess raveling using the percentage of aggregate loss. In a survey reported in 2017, thirty-five states indicated they were using a 3D automated data collection system or planned to use such a system within the next two years [
9]. In many states, high-resolution 3D pavement range images have been collected for pavement evaluation for many years. The method proposed in this paper can be used to quantify raveling conditions with the 3D pavement data, which is already collected by all 50 states; it can be used to determine adequate pavement preservation, such as fog seal, to prolong pavement life. This has not previously been possible to achieve. The developed quantitative measure and technology method could be impactful nationwide and worldwide because of its ability to maximize pavement preservation effectiveness.
Three-dimensional (3D) pavement surface data have been used to automatically and semi-automatically extract pavement distresses; they have been used in many pavement studies, including the following: detecting and measuring cracking [
10,
11] and its deterioration [
12], rutting [
13,
14], concrete joint faulting [
15], project-level micro-milling pavement surface texture construction quality control [
16], automatic pothole detection [
17], and a new area-based faulting measurement with enhanced accuracy [
18]. However, there are only a limited number of studies that have used 3D pavement data to quantitatively measure the pavement raveling condition.
Previous studies have used the standard deviation of a range of an image’s pixel values as an indicator to classify raveling conditions [
19] or a range value to determine the volume of surface material loss [
20]. While a standard deviation is a good indicator of surface roughness, it cannot be used to physically quantify aggregate loss due to raveling. For methods that quantify raveling through the determination of aggregate loss volume, it is important to determine the accurate reference surface for quantifying aggregate loss. A reference surface represents the pavement surface in its pristine conditions, that is, with no aggregate loss. However, there are technical challenges in that reference surface estimation becomes more difficult with more aggregate loss, and this leads to results that generally underestimate the aggregate loss of more severe raveling conditions. Therefore, there is a need to develop an enhanced approach to quantify pavement aggregate loss.
Additionally, previous attempts to quantify aggregate loss have also lacked a systematic validation process to comprehensively evaluate the performance of the proposed methods. To validate any method that aims to quantify the loss of aggregate on a pavement surface, true aggregate loss references need to be established; in other words, the amount of aggregate loss on a pavement surface needs to be measured. Such a task is very difficult to perform on real-world pavement surfaces; therefore, a procedure that can produce pavement surfaces or range images with known aggregate loss values is required to validate the proposed method.
The focus of this paper is to propose a method to quantify raveling conditions, and the objectives of this paper are the following: (1) to develop a method to quantify raveling conditions with the loss of aggregate with a new performance indicator using 3D pavement surface images data already collected, (2) to develop a fabricated pavement mat and procedurally generate synthetic pavement images with the known loss of aggregate values, and (3) to critically validate the accuracy of the proposed method.
The paper is organized as follows. First, the background and objective of this paper are presented. Second, the proposed method and its steps are presented. Third, the validation procedure of the proposed method is shown. Fourth, the performance of the proposed method is compared to other methods that can quantify material loss on a surface. Finally, conclusions and recommendations are made.
2. Proposed Method
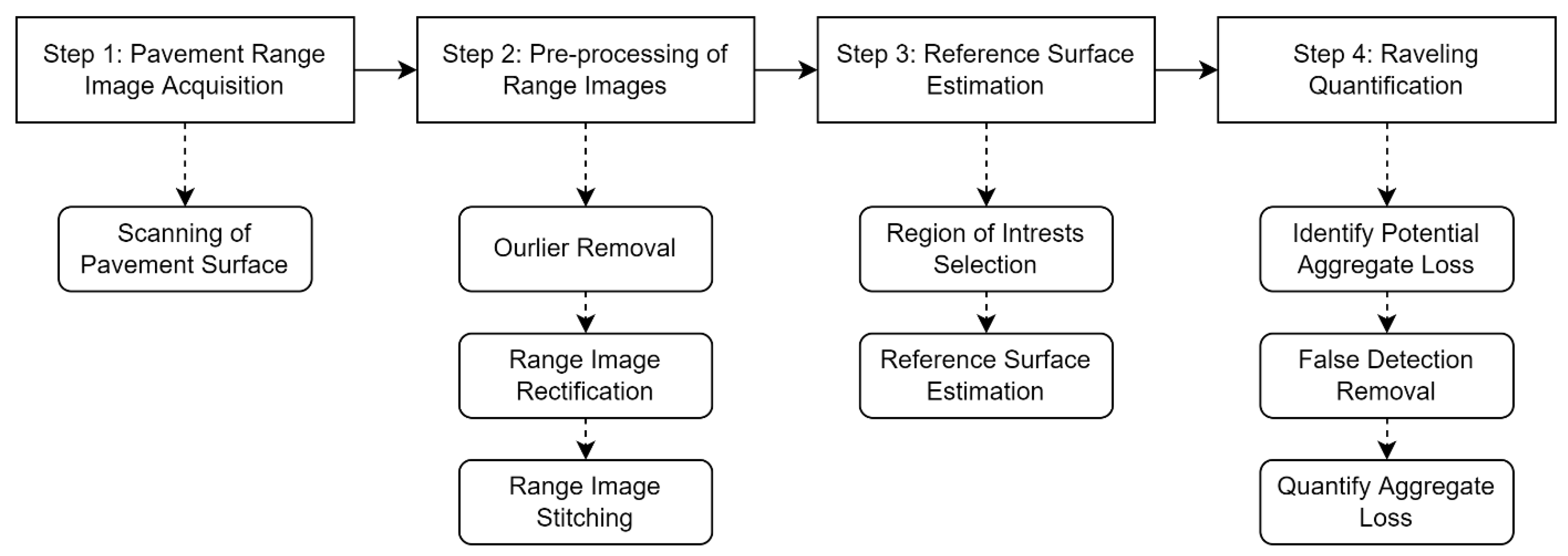
To perform automatic raveling detection and quantification using 3D pavement range images and the loss of aggregate as a new performance indicator, a method is proposed. The proposed method, at its core, first estimates a reference surface that represents the pavement in its pristine condition with no aggregate loss. Then, based on the reference surface, the proposed method identifies and quantifies material loss on a pavement surface. As presented in
Figure 1, the proposed method uses the following steps: (1) pavement range data acquisition, (2) pre-processing of the pavement range image, (3) reference surface estimation, and (4) raveling quantification.
2.1. Step 1: Pavement Range Data Acquisition
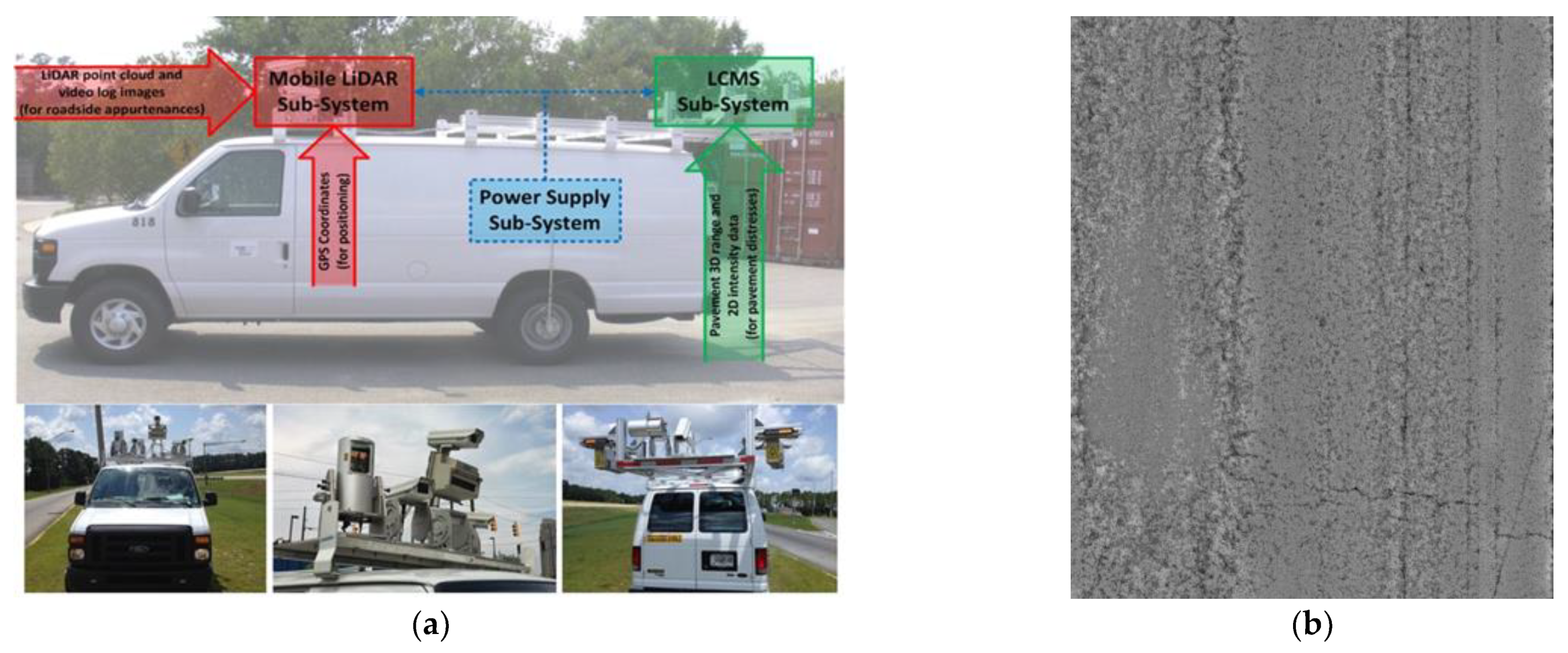
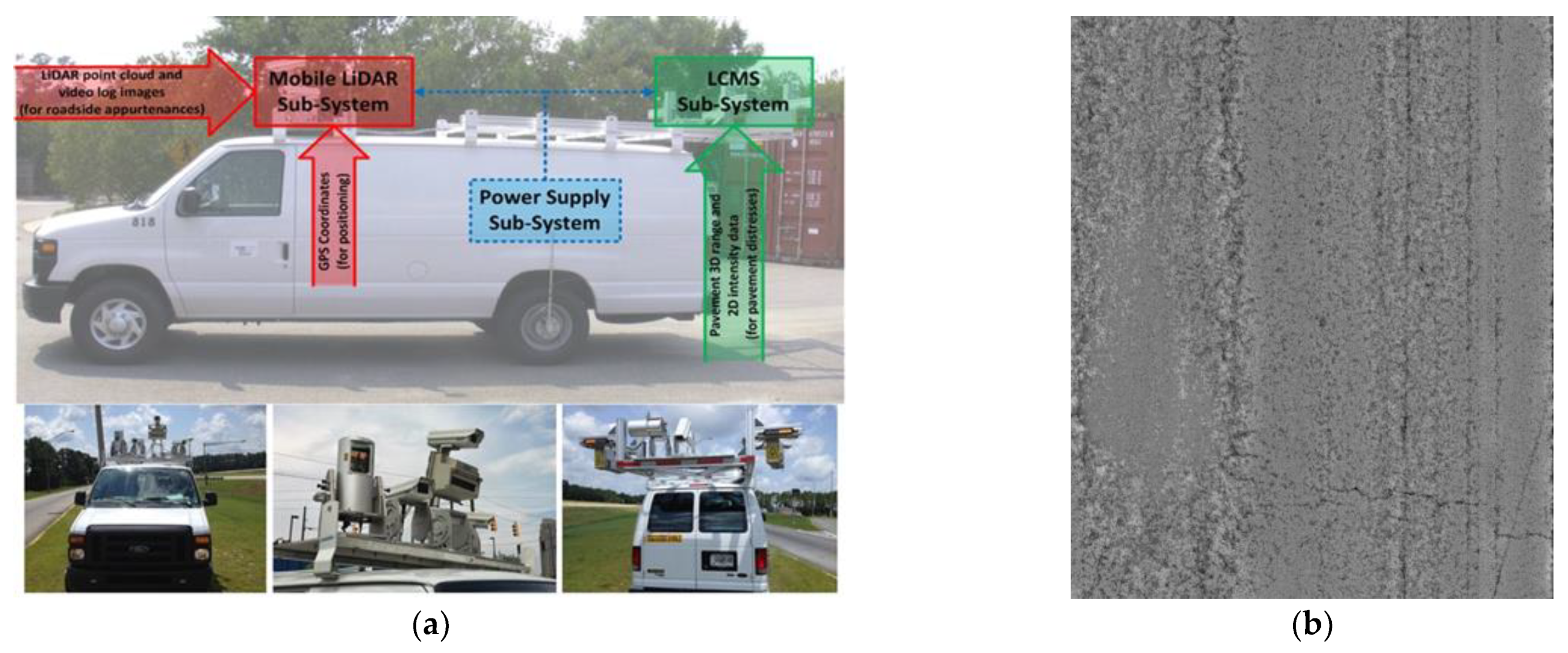
In this study, the Georgia Tech Sensing Vehicle (GTSV), equipped with a 3D pavement laser system, was used to collect the pavement range images. The GTSV, as shown in
Figure 2a, was sponsored by the US DOT and GDOT. It consists of a pair of high-frequency pavement profiling lasers (LCMS, manufactured by INO/Pavemetrics) that can operate up to 5.6 kHz at highway speed (60 mph). The detailed pavement range images obtained from the laser system have a longitudinal resolution of 5mm, a transverse resolution of 1 mm, and a 0.5 mm resolution of elevation measurement at each data point. The pavement range images were used to estimate the reference surface, and then identify and quantify the aggregate loss.
Figure 2b shows an example of a pavement range image with raveling at Severity Level 3.
2.2. Step 2: Pre-Processing Pavement Range Images
The goal of pre-processing is to prepare the acquired range images for raveling detection in later steps. Pre-processing involves three sub-steps (detailed in this section) to remove noise from the range image, rectify the range image to remove cross slope and other pavement deformations (such as rutting), and, finally, to stitch together the range images from two laser sensors to establish a full-lane range image.
2.2.1. Step 2.1: Remove Noise and Smooth Range Image Using Gaussian Filter
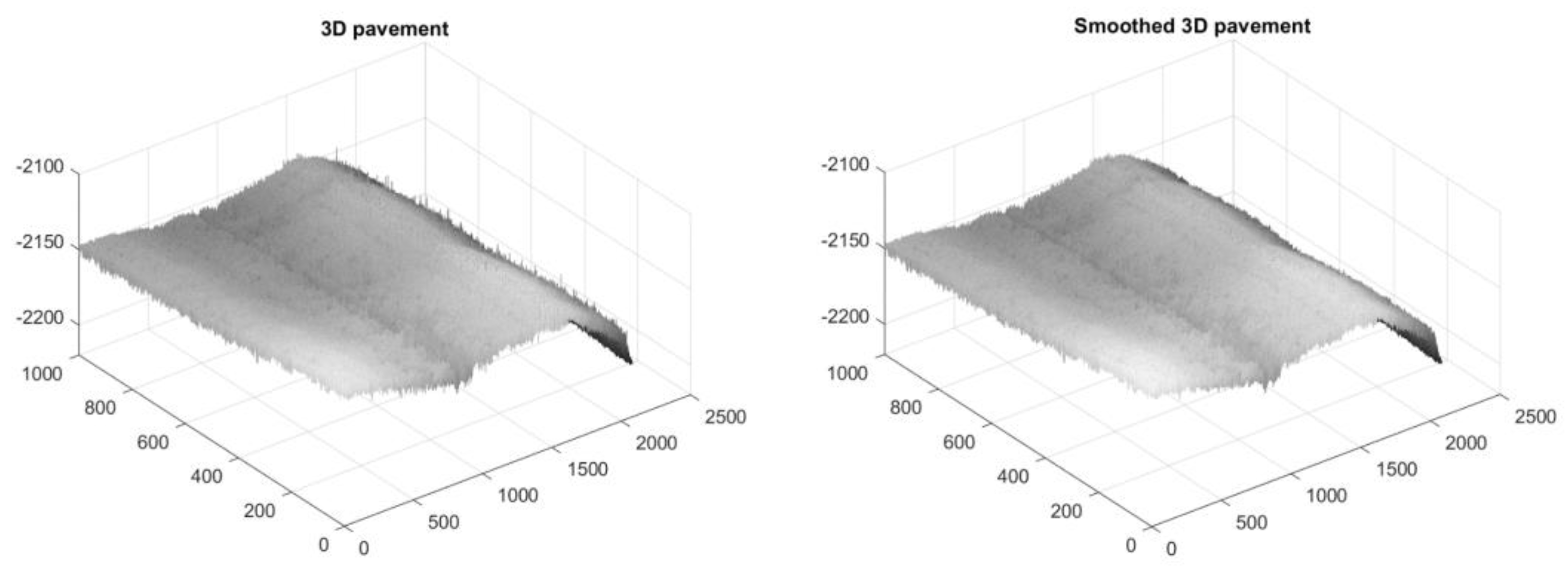
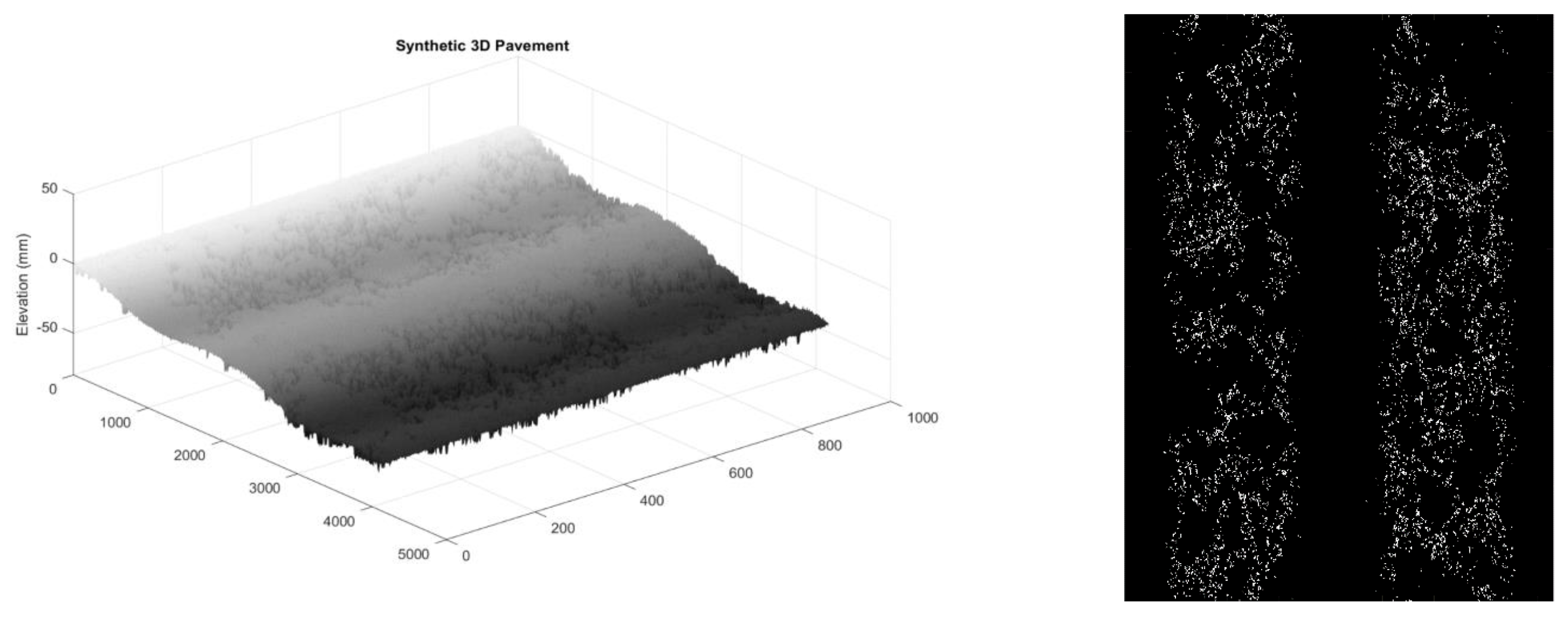
The obtained raw range image can contain some missing data points and noisy data points caused by the 3D laser device and surface conditions (e.g., shiny surfaces, wet surfaces). To mitigate the effect of the noise on raveling detection, missing data points on the surface are first filled using linear interpolation, and then the surface data is smoothed using a Gaussian filter.
Figure 3 shows an example of a 3D pavement surface being processed to remove spikes (noises).
2.2.2. Step 2.2: Rectify (Level) Range Image Surface by Removing Cross Slope and Rutting
As shown in the
Figure 3, the collected 3D pavement is not a flat surface but a complex shape that consists of varying pavement features, such as cross slope and edge drop-off, and pavement deformations, such as rutting. To rectify a range image is to remove these macro-features so that localized features, such as cracks, joints, and aggregate loss, can be enhanced and more easily identified.
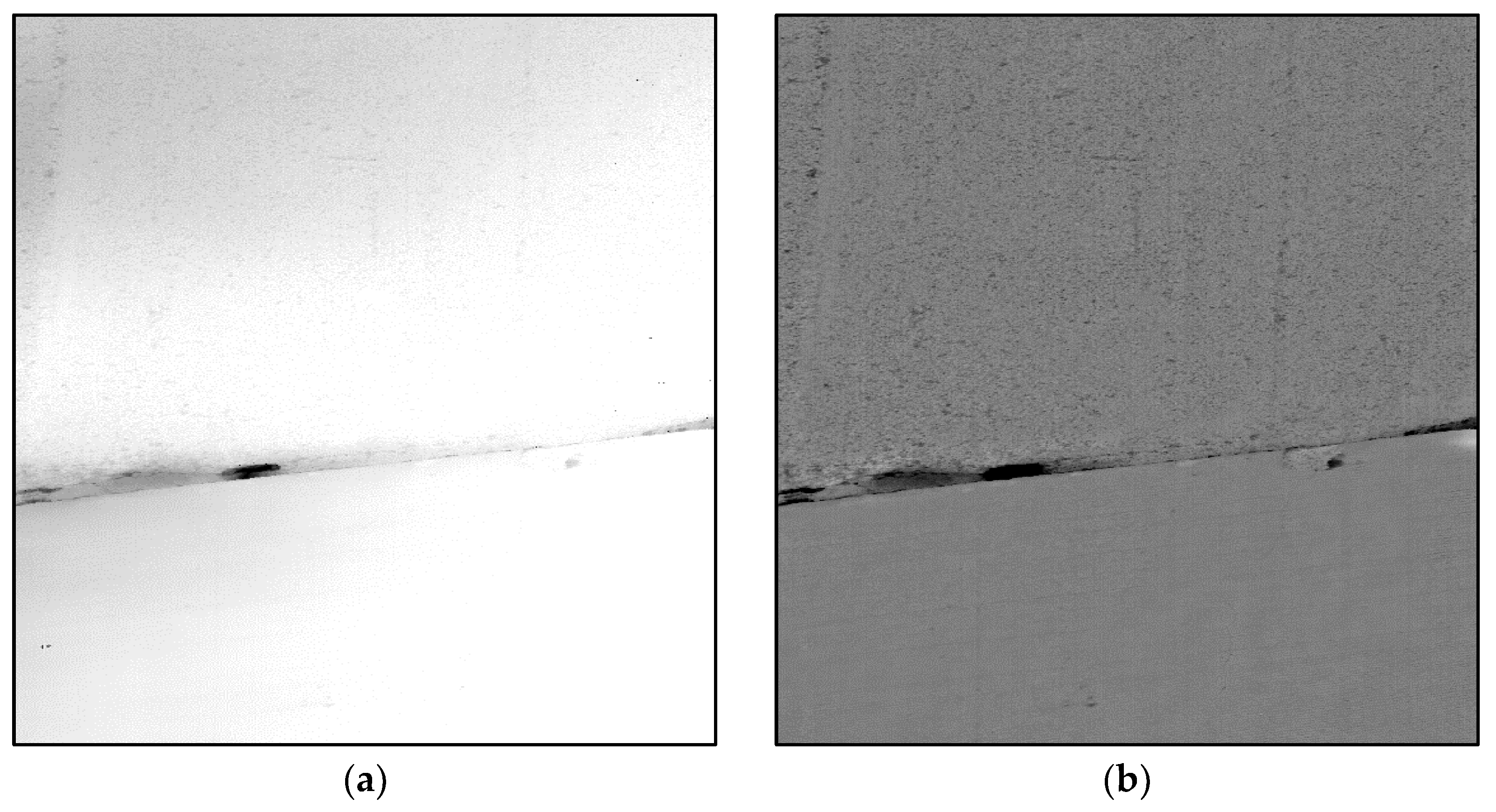
Figure 4a shows an example of a range image before rectification. After rectification, the joint and material loss on the pavement is easier to see, as shown in the rectified image in
Figure 4b. The rectification can be performed using a moving average filter.
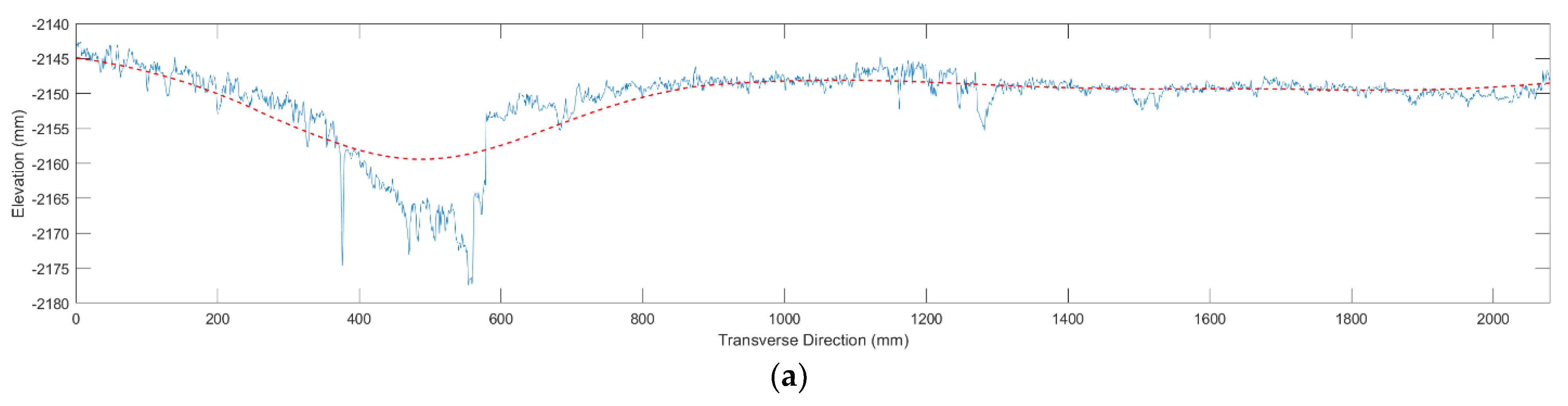
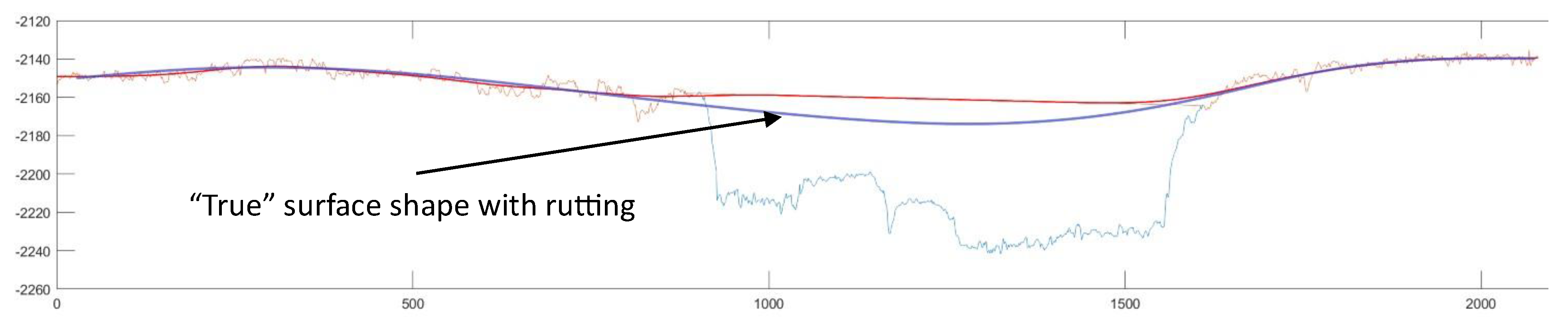
Rectification can be performed using the moving average of each transverse profile to extract the general shape of the pavement. Then, the values from the moving average profiles are subtracted from each corresponding transverse profile to obtain the rectified profiles. However, if the transverse profile contains areas that have large elevation drops over a wide area, as the length of the area approaches the moving average window size, the rectified image can no longer preserve the amount of elevation change visible on the original range image,
Figure 5a shows how the moving average (red line) would “dip” at a location with high material loss. Since the objective of the proposed method is to quantify both the aggregate loss area and aggregate loss volume, not being able to preserve the elevation change will cause an underestimation of the aggregate. Therefore, areas with “wide raveling” need to be identified and treated differently in rectification.
Figure 5b shows rectification with wide-raveling identification; the moving average (red dashed line) captured the general shape of the pavement without a “dip” at the location with high material loss. The moving average algorithm used in this figure has a window size of 20, which is 20 mm in real-world distance.
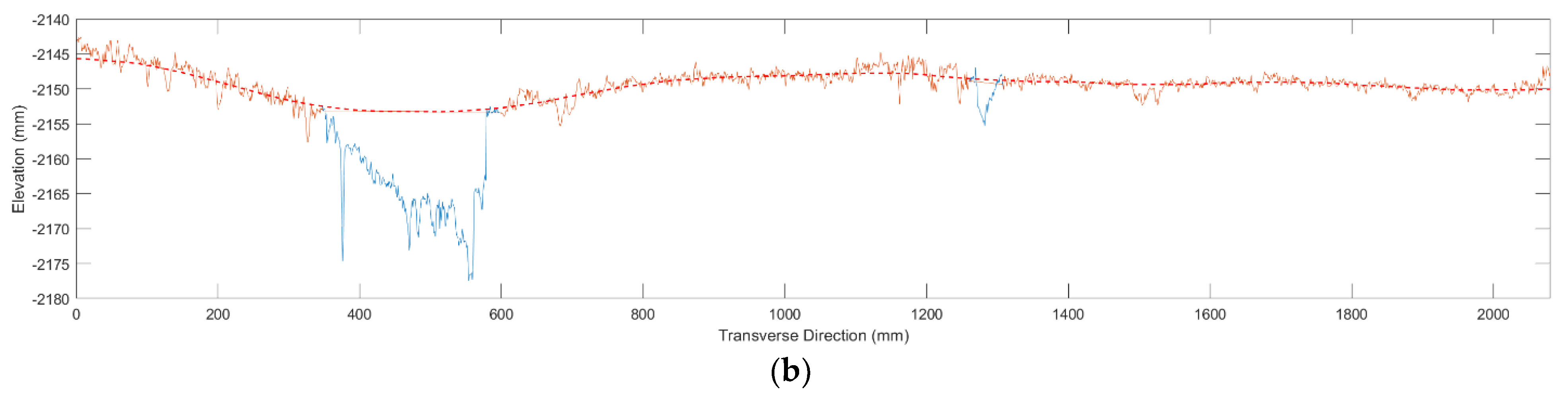
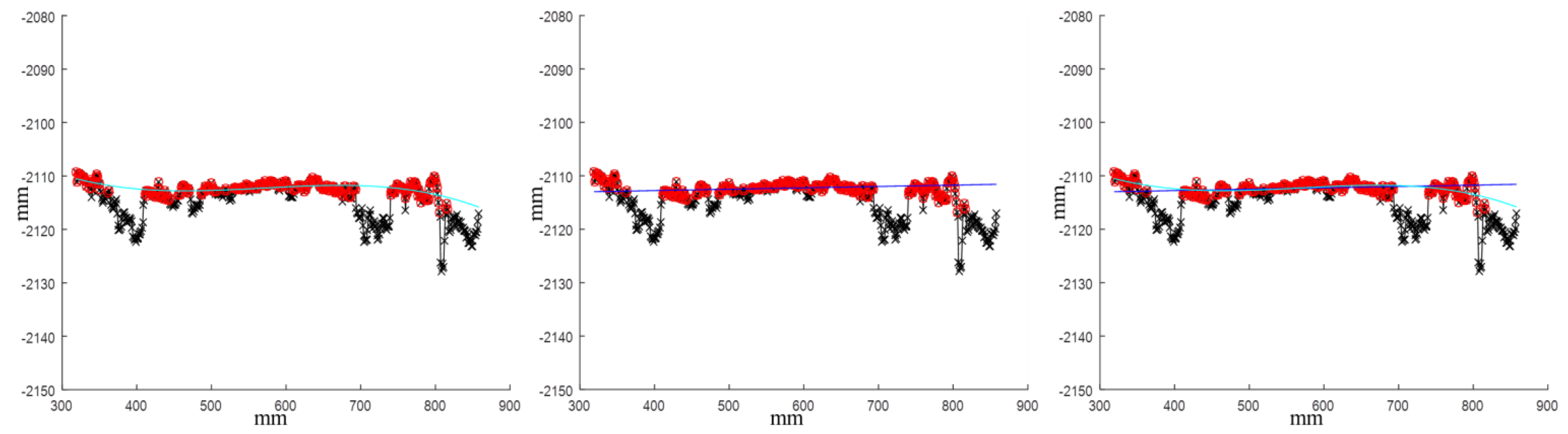
Figure 6 shows how wide-raveling identification is performed. First, the cross slope is estimated by fitting the transverse profile (blue line) with a first-order polynomial (purple line). Second, the moving average with a small window size (window size = 20) is used to smooth out the transverse profile (red line). Then, areas with low elevation, defined as a lower threshold than the fitted first-order polynomial (green line) and also accompanied by a sharp elevation change (defined based on the profile slope) are segmented and labeled as a wide-raveling area. During rectification using a moving average, to avoid using data from the wide-raveling area, data points within each wide-raveling area are replaced by a linear interpolation between the beginning and end of each wide-raveling area, as shown in
Figure 6 Step 3.
2.2.3. Step 2.3: Stitch Two-Sensor Images to Establish Full-Lane Pavement Range Image
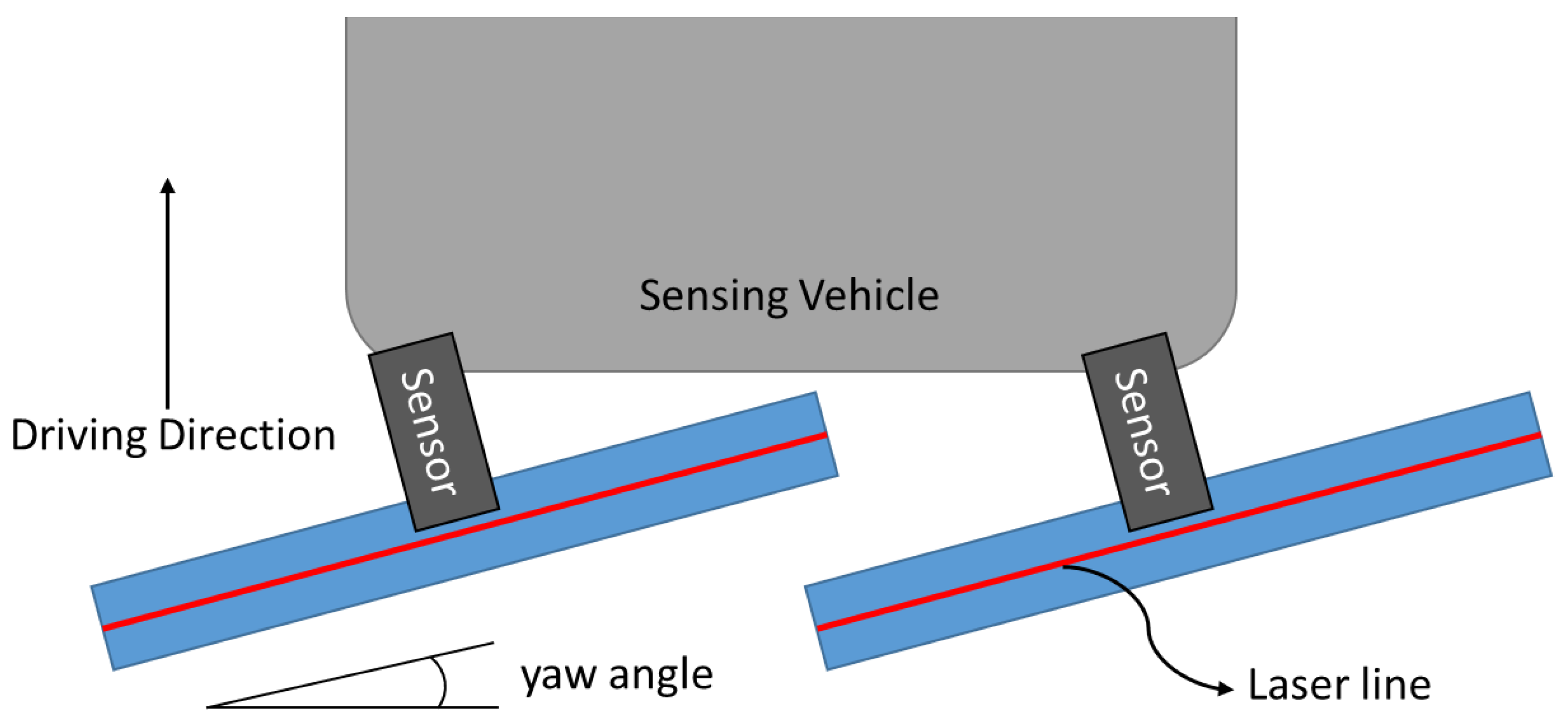
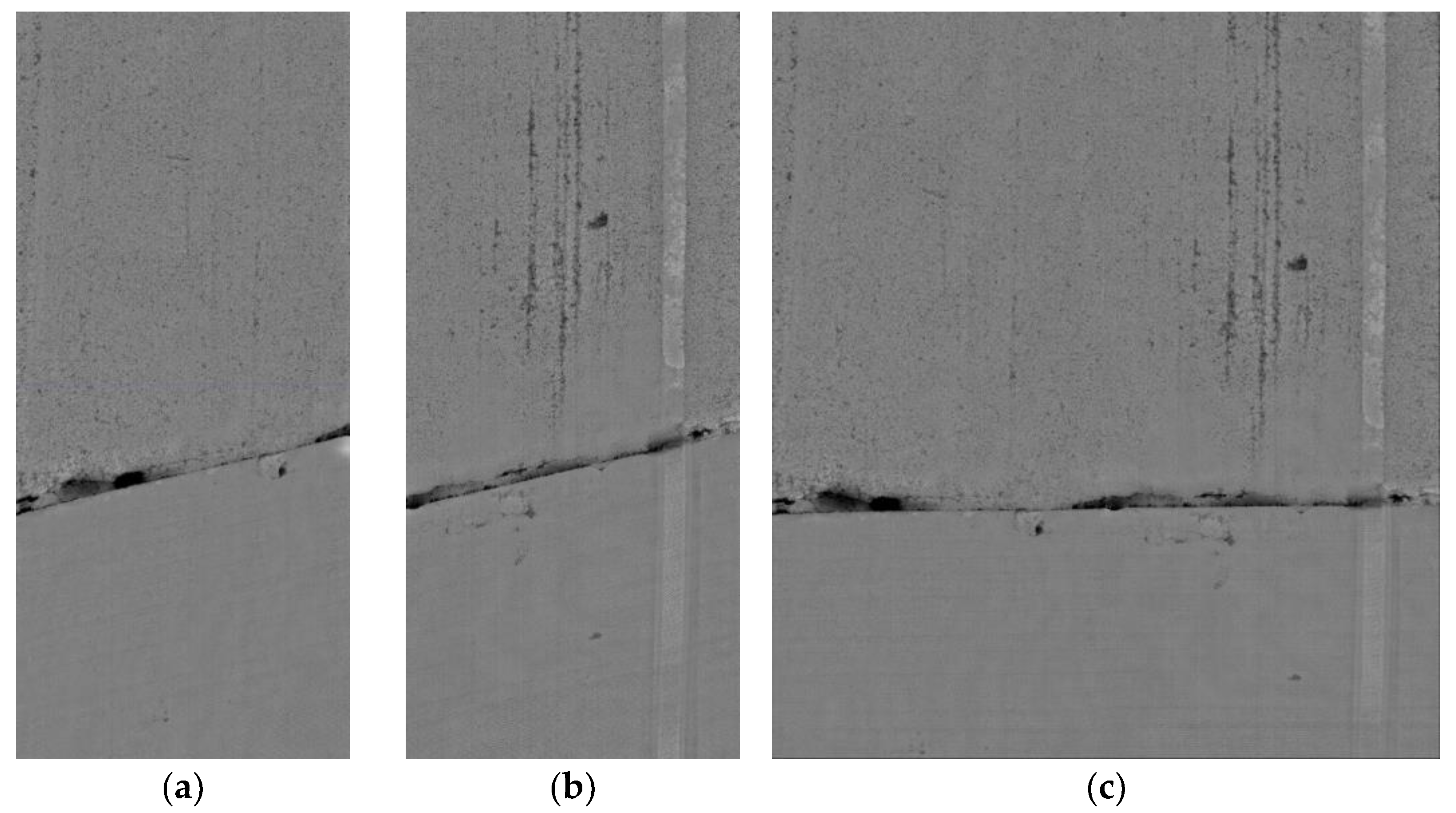
The laser system equipped on the GTSV uses two 3D laser sensors to collect pavement range data. Because the sensors are set up to have a small angle between the line laser and the transverse direction of the road to avoid the laser from one sensor interfering with the other sensor, as shown in
Figure 7, the range image collected is skewed from its actual orientation. In
Figure 8a,b range images collected by the laser sensors on the GTSV are shown; each image covers roughly half the width of the traveled lane. The pavement joints on these images are actually in the transverse direction of the road, but because of the angle of the sensor, the pavement joints in the images are skewed. Therefore, after rectification, the range images are rotated and stitched to form a full-lane pavement image, as shown in
Figure 8c.
2.3. Step 3: Reference Surface Estimation
Using the range images prepared in pre-processing, loss of aggregate is detected using the four processing steps detailed in this section. The outcome from this step is a binary image indicating the location of the detected aggregate loss on the pavement surface.
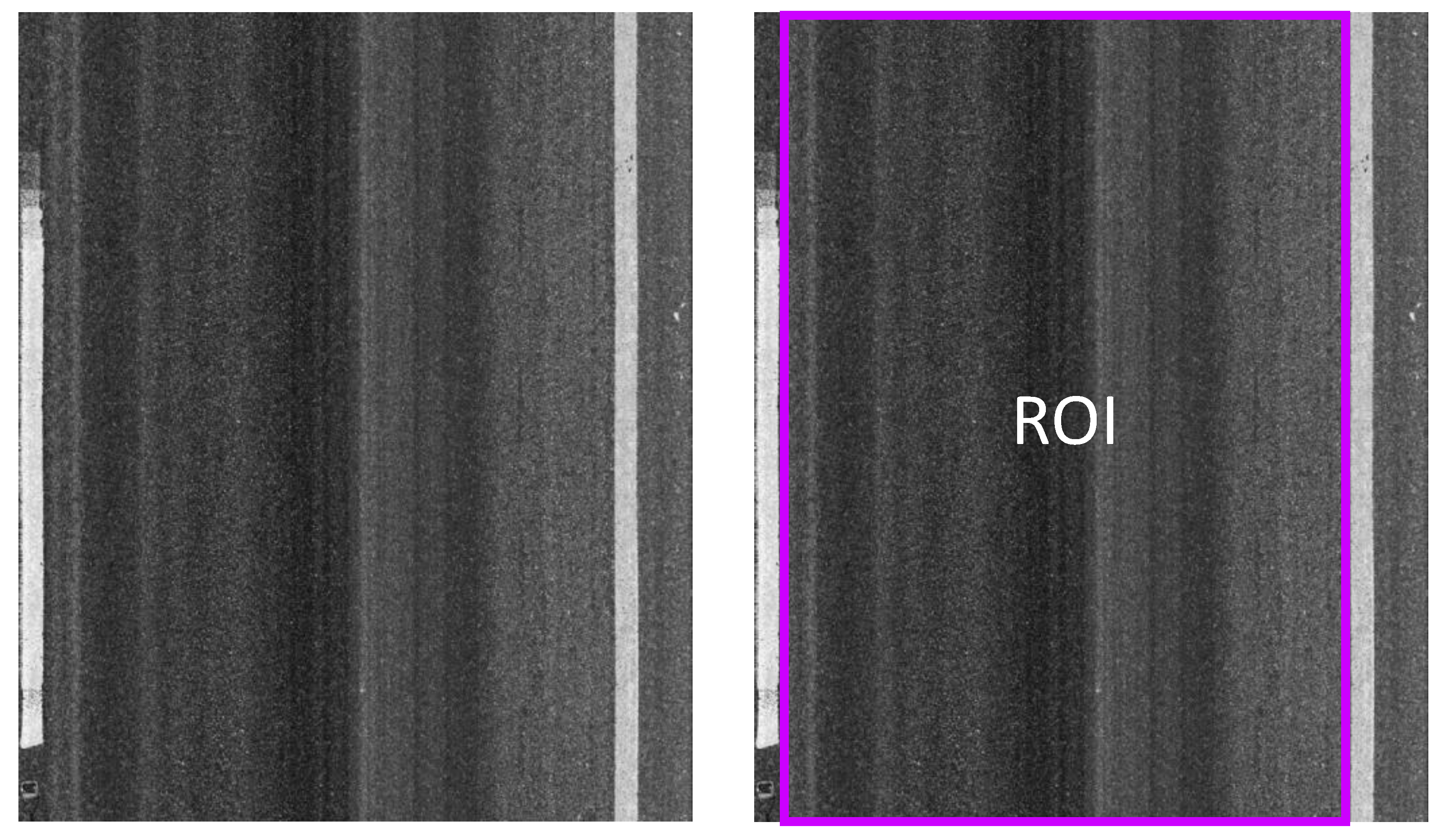
2.3.1. Step 3.1: Using Pavement Markings to Select Regions of Interest (ROIs)
The 3D laser system used in this study collects range images and intensity images of the pavement. From the intensity images, highly reflective surfaces, such as pavement markings, can be easily identified, as shown in
Figure 9. By selecting the ROI for the detected loss of aggregate within the lane marking, this process effectively removes other features, such as pavement markings, road reflectors, rumble strips, and cold joints at the edge of pavements, which may be captured by the laser sensors. Removing these features reduces noise and makes the pavement within the ROI more predictable, thus improving the performance of the proposed method.
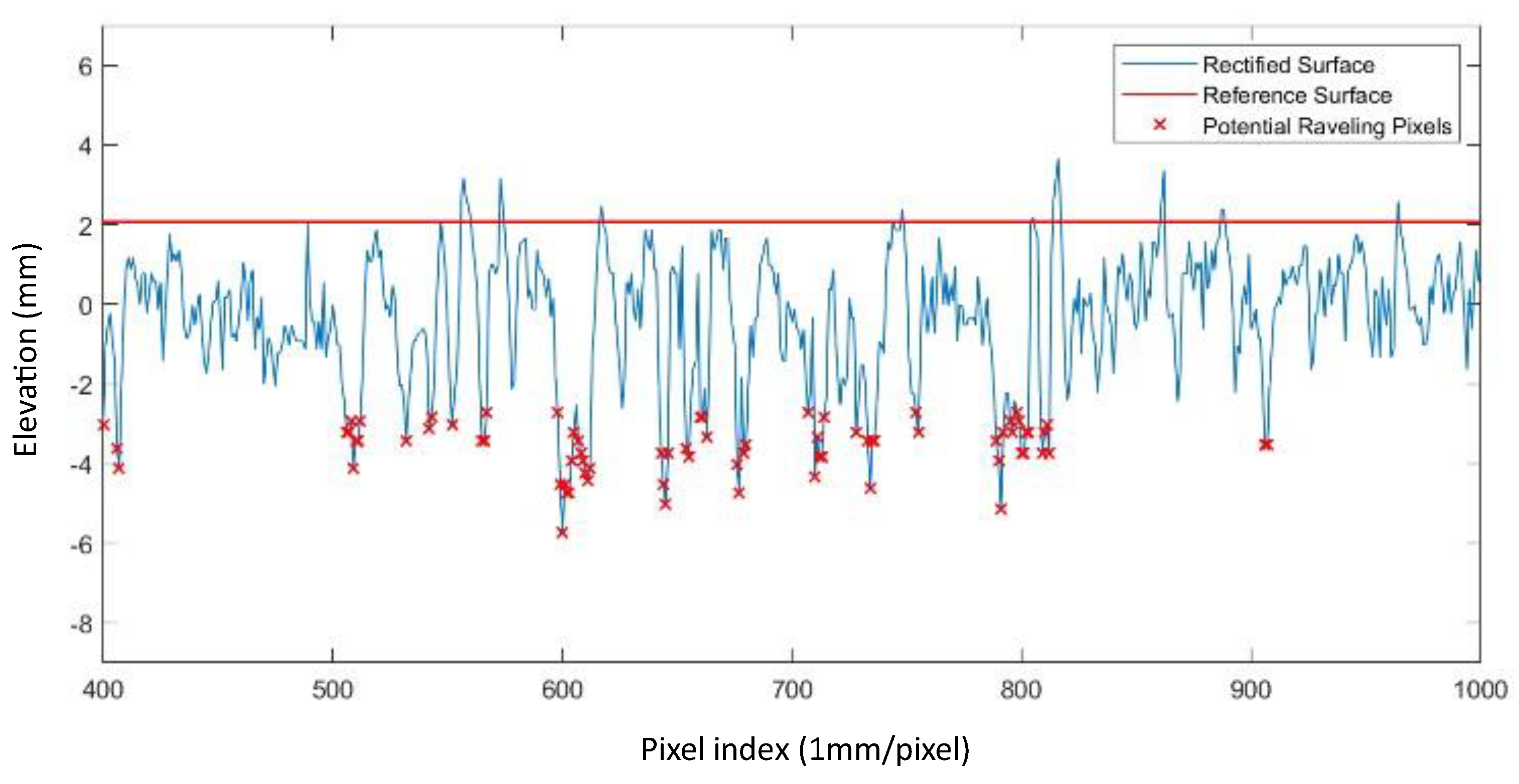
2.3.2. Step 3.2: Use 95th Percentile to Estimate Reference Surface for Each Transverse Profile
The proposed method uses the reference surface to identify and quantify aggregate loss; the reference surface is a smooth surface that represents a pristine surface with no voids and material loss. Such surfaces should intersect with the top surface of aggregates on a brand new pavement. This is shown as the red line in
Figure 10. In this step, due to the rectification step, the profiles are “leveled”; rutting and other pavement deformations are removed while the wide raveling areas are preserved. The reference surface can be simplified as a straight line, so the 95th percentile of each rectified transverse profile is used as the reference surface.
2.4. Step 4: Raveling Quantification
2.4.1. Step 4.1: Identify Candidate Pixels of Aggregate Loss
With the reference surface established, each pixel is evaluated. Using simple thresholding, any pixel that is more than 4.75 mm lower than the reference surface is marked as a potential aggregate loss pixel, as shown by the red cross markers in
Figure 10. The 4.75 mm threshold was chosen based on the recommended gradation for OGFC, as 75–90% of the aggregate used in OGFC is larger than 4.75 mm in size [
21].
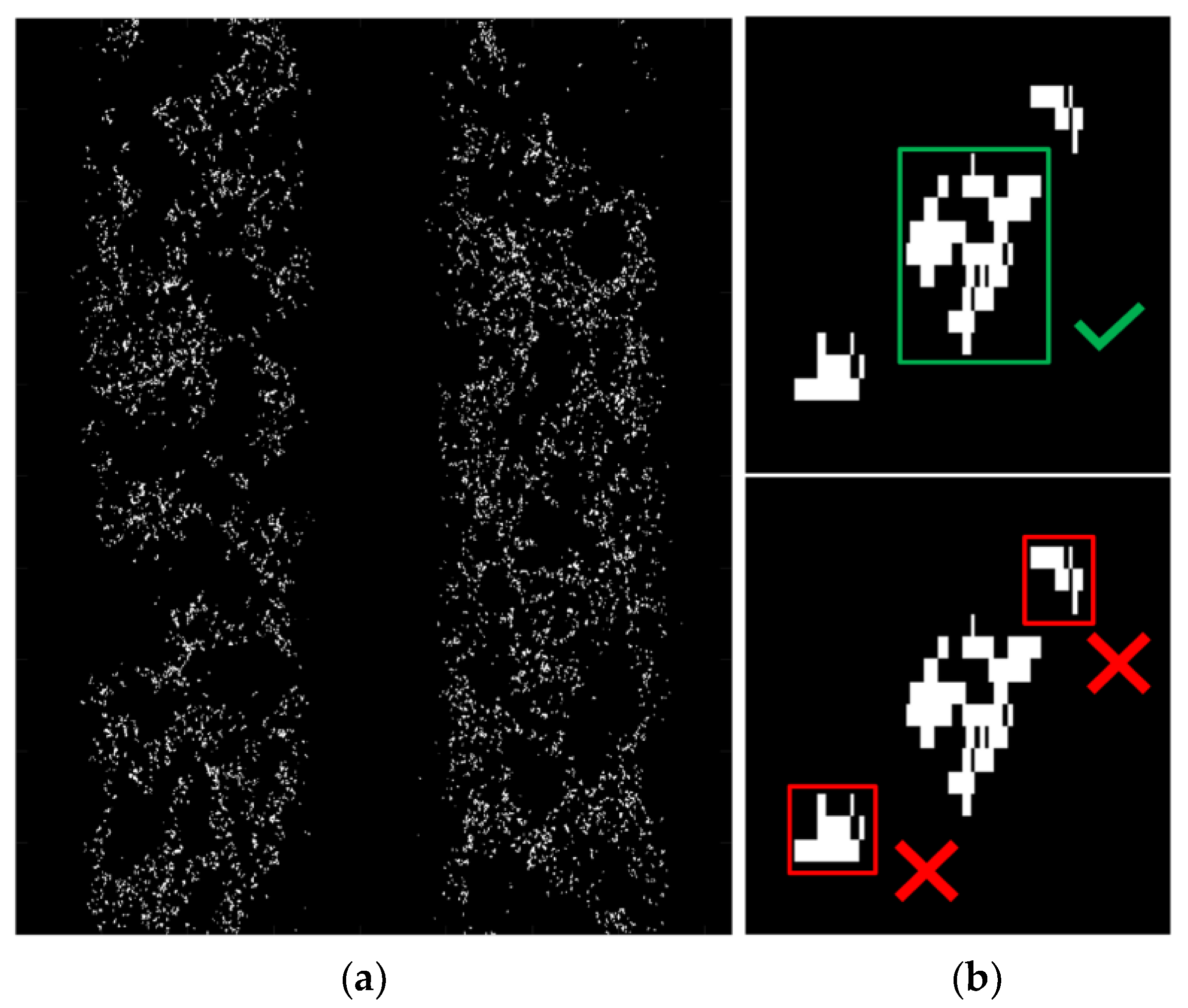
2.4.2. Step 4.2: Analyze Connected Components to Remove Noise
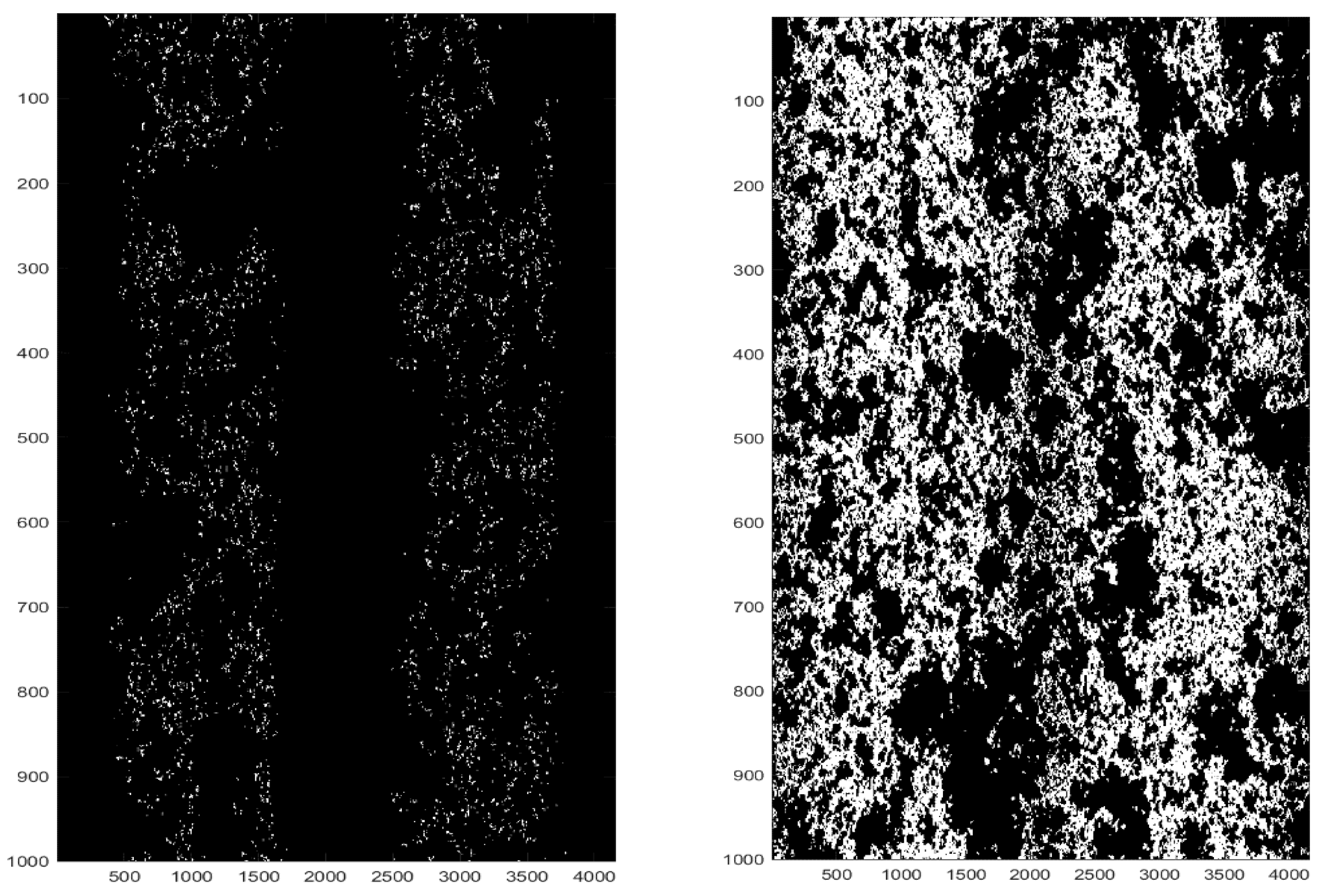
After marking all candidate pixels, a binary image of the pavement, such as shown in
Figure 11a, of the pavement can be generated to indicate the locations of all candidate pixels. Because the binary image is obtained through thresholding based on the elevation, the image may contain small surface imperfections or voids between aggregates that should not be considered aggregate loss. To filter out these pixel groups, which are too small to be aggregate loss, each connected component on the binary image is evaluated based on its bounding box sizes. Because aggregate used in OGFC surfaces is typically 4.75–9.5 mm, and dislodged aggregates are likely to have surrounding materials attached, a connected component with a bounding box larger than 10 mm by 10 mm will be accepted as the loss of aggregate, and a bounding box smaller than 10 mm by 10 mm will be rejected. The filtered binary image will be passed down to the next step for loss-of-aggregate quantification.
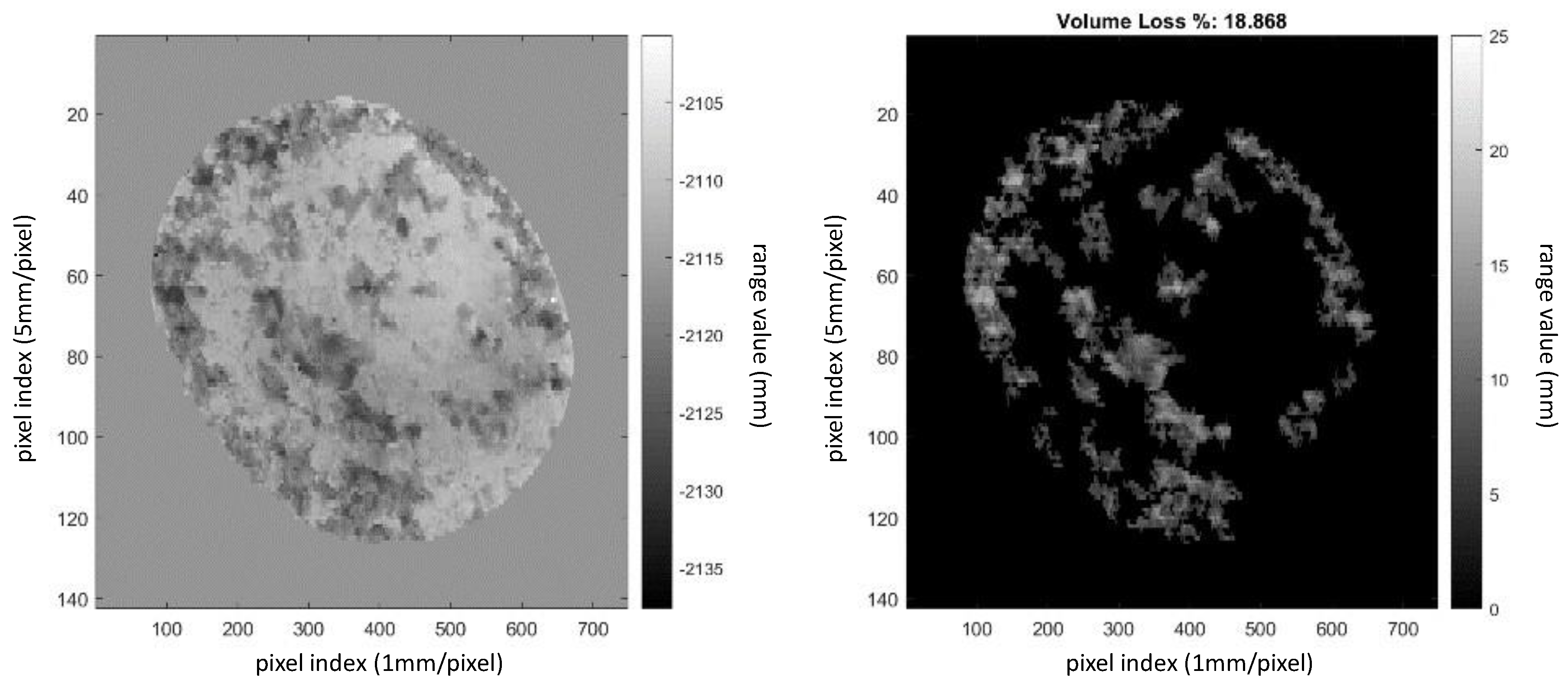
2.4.3. Step 4.3: Aggregate Loss Quantification
Finally, with a filtered binary image, aggregate loss can be quantified. The proposed method quantifies both the percent of the aggregate loss area and the percentage of the aggregate loss volume. The total aggregate loss area (
) and total aggregate loss volume (
) can be expressed as follows:
where
is the number of aggregate loss pixels;
and
are the sizes of each pixel in terms of real-world dimensions in the transverse and longitudinal directions.
is the average elevation difference between each aggregate loss pixel and the reference surface, and
is the elevation difference at each aggregate loss pixel to the reference surface.
From
and
, the percentage of aggregate loss area and the percentage of aggregate loss volume can be computed based on the size of the ROI and the volume of OGFC within the ROI. In addition to the percentage of loss area and percentage of loss volume, the loss volume per unit area can also be an absolute raveling indicator when the information about the pavement thickness is not available. The percentage of loss volume and volume loss per unit area can be expressed as follows:
4. Conclusions
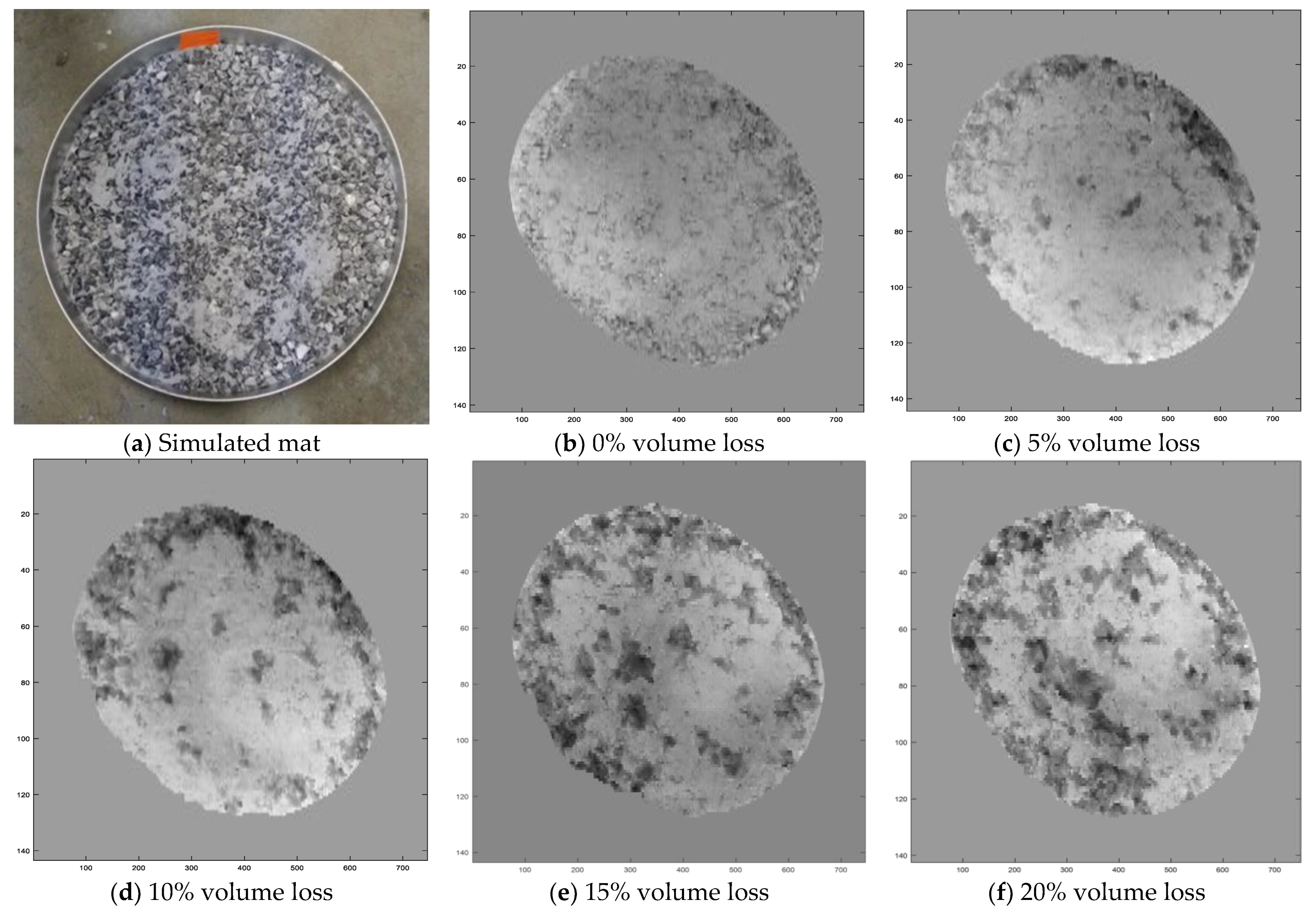
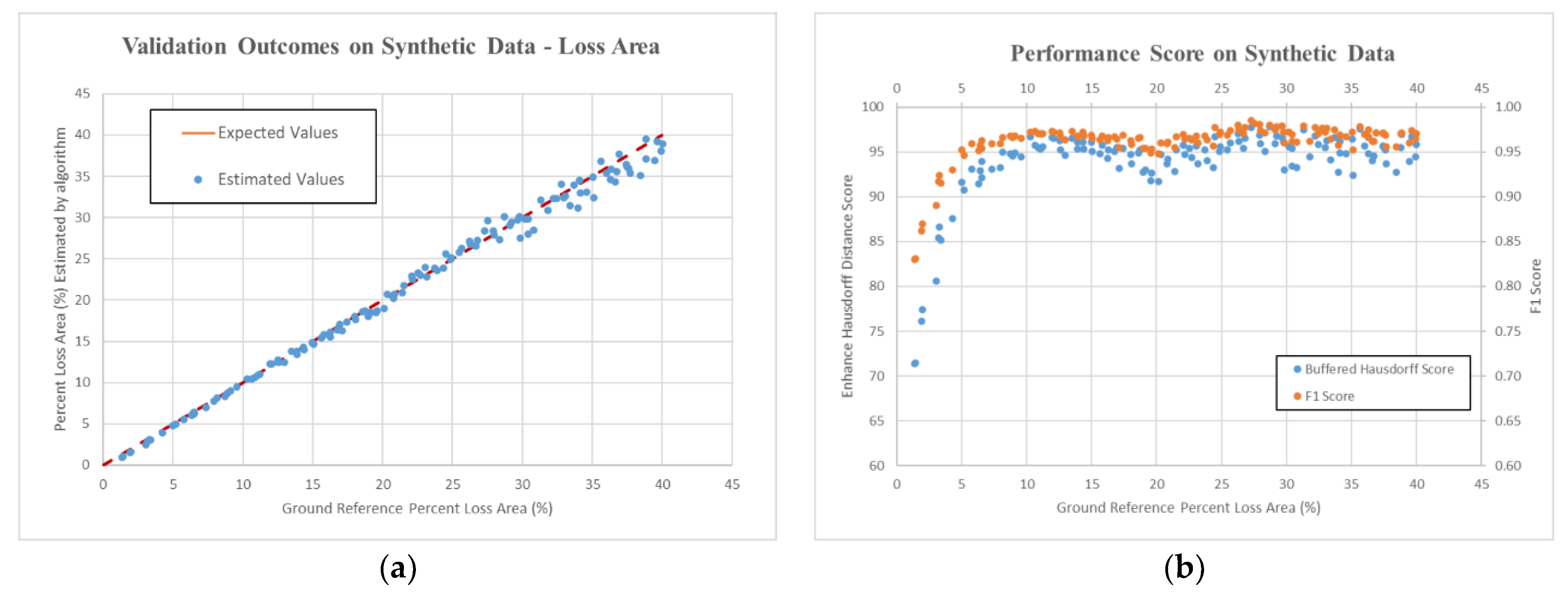
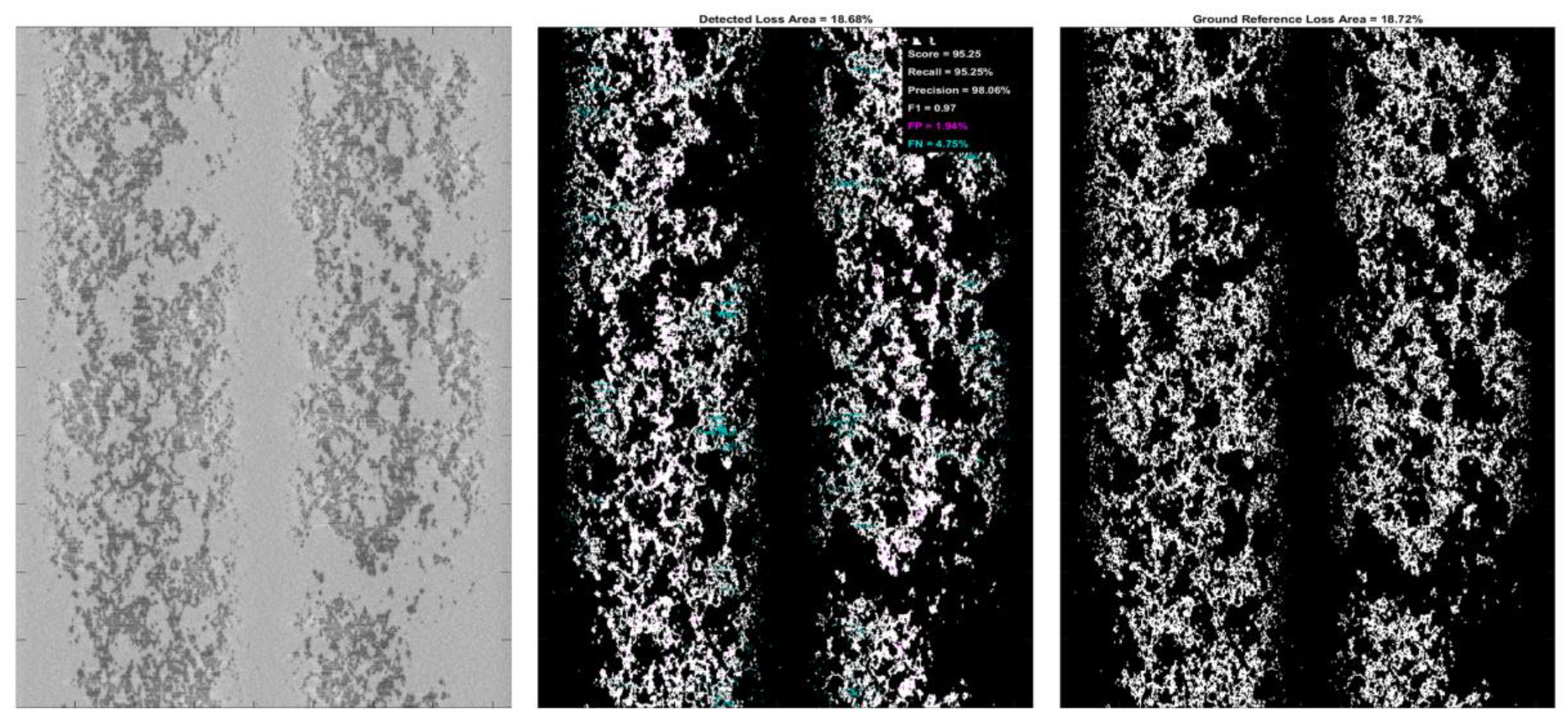
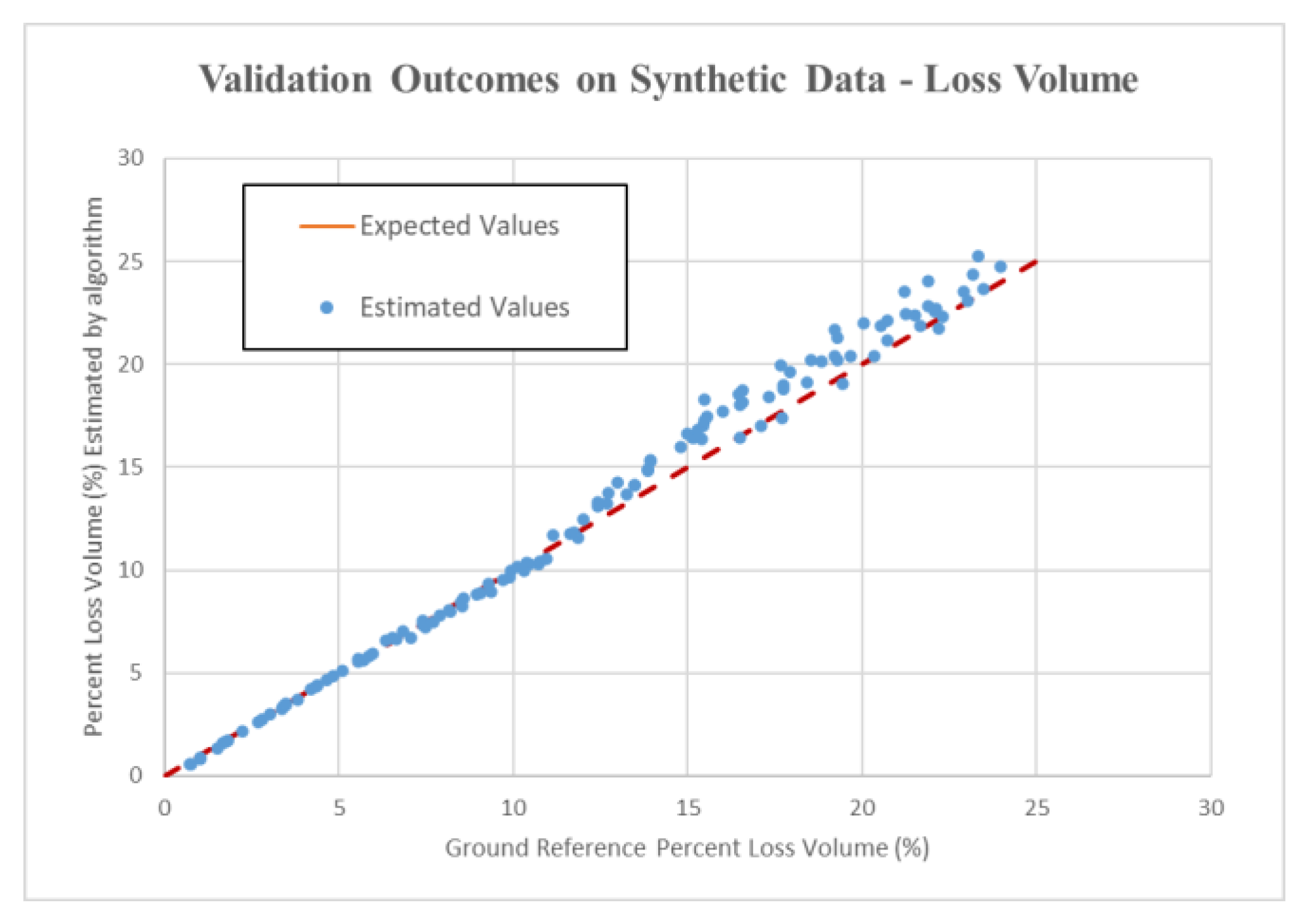
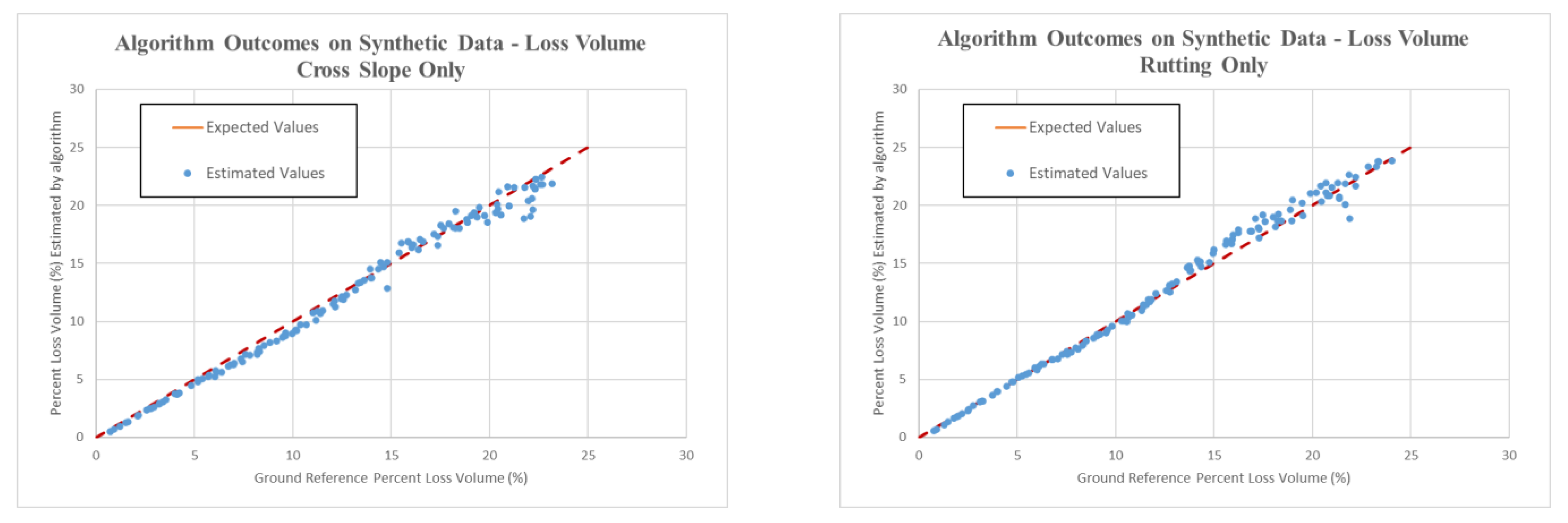
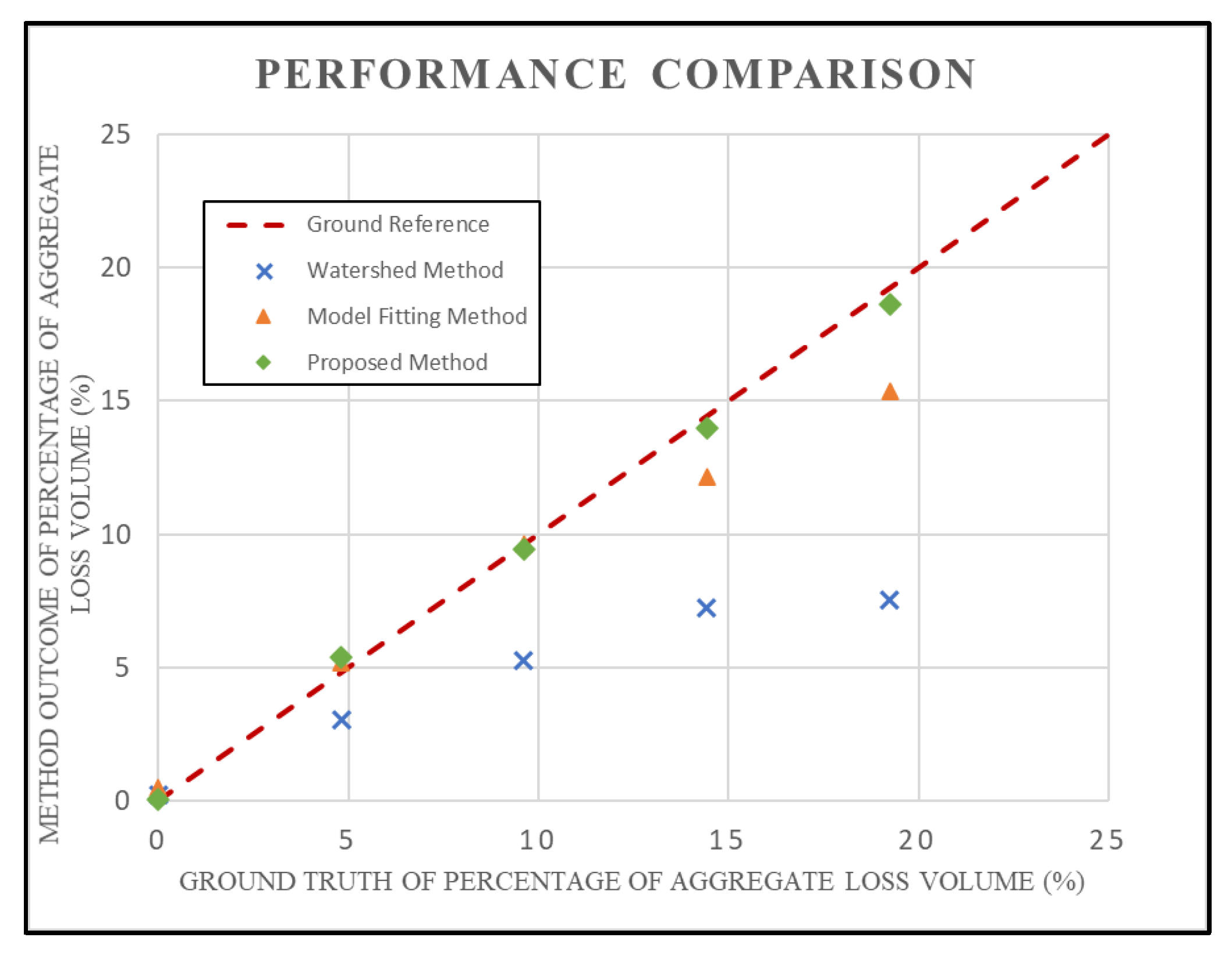
This paper proposes an automatic method, with the loss of aggregate as a new performance indicator, using 3D pavement data to quantitatively measure pavement raveling conditions. The proposed automatic method consists of (1) pavement range data acquisition, (2) pre-processing pavement range images, (3) raveling detection, and (4) raveling quantification. Using lab-fabricated pavement mats and procedurally generated pavement images, the proposed method shows an excellent performance in both aggregate loss volume quantification and aggregate area quantification; the percentages of aggregate loss volumes and areas quantified had less than a 3% difference compared to the expected values. A correlation coefficient of 0.995 was found between the quantified aggregate loss volume and the expected values obtained from the lab-simulated pavement mats. Correlation coefficients of 0.996 and 0.997 were found when comparing the proposed method’s data to expected volume loss and expected area loss obtained from the synthetic pavement data. A critical analysis was also conducted by comparing the performance of the proposed method with other methods (the watershed method and model fitting method). The analysis shows the proposed method had a similar performance to the model fitting method for small percentages of aggregate loss (1–10%); it outperformed other methods in identifying a loss of aggregate between 10% and 20%.
The contribution of the paper includes (1) a loss-of-aggregate quantification method using an enhanced reference surface determination method with wide-raveling identification to resolve the underestimation issue, ensuring the accuracy of the loss-of-aggregate measurement at Severity Level 1, which is the critical range for making pavement preservation decisions, such as applying fog seal; (2) a method to generate synthetic pavement data using a procedurally generated aggregate loss pattern to address the technical challenges in obtaining the loss of aggregate in the field for validation of the proposed method.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}