
Novel Combined Load Frequency Control and Automatic Voltage Regulation of a 100% Sustainable Energy Interconnected Microgrids



Abstract
:1. Introduction
- Application of an LFC–AVR scheme on a multi-area system with 100% renewable energy.
- Proposal of a novel controller, which is an accelerating PID (PIDA), in comparison with the state-of-the-art control schemes, namely FOPID, NPID, and PID.
- Application of DPO as a new optimization technique in comparison with the state-of-the-art techniques.
- Comparison between separate and combined designs of LFC and AVR.
- Proposal of a new cost function for the controllers’ design.
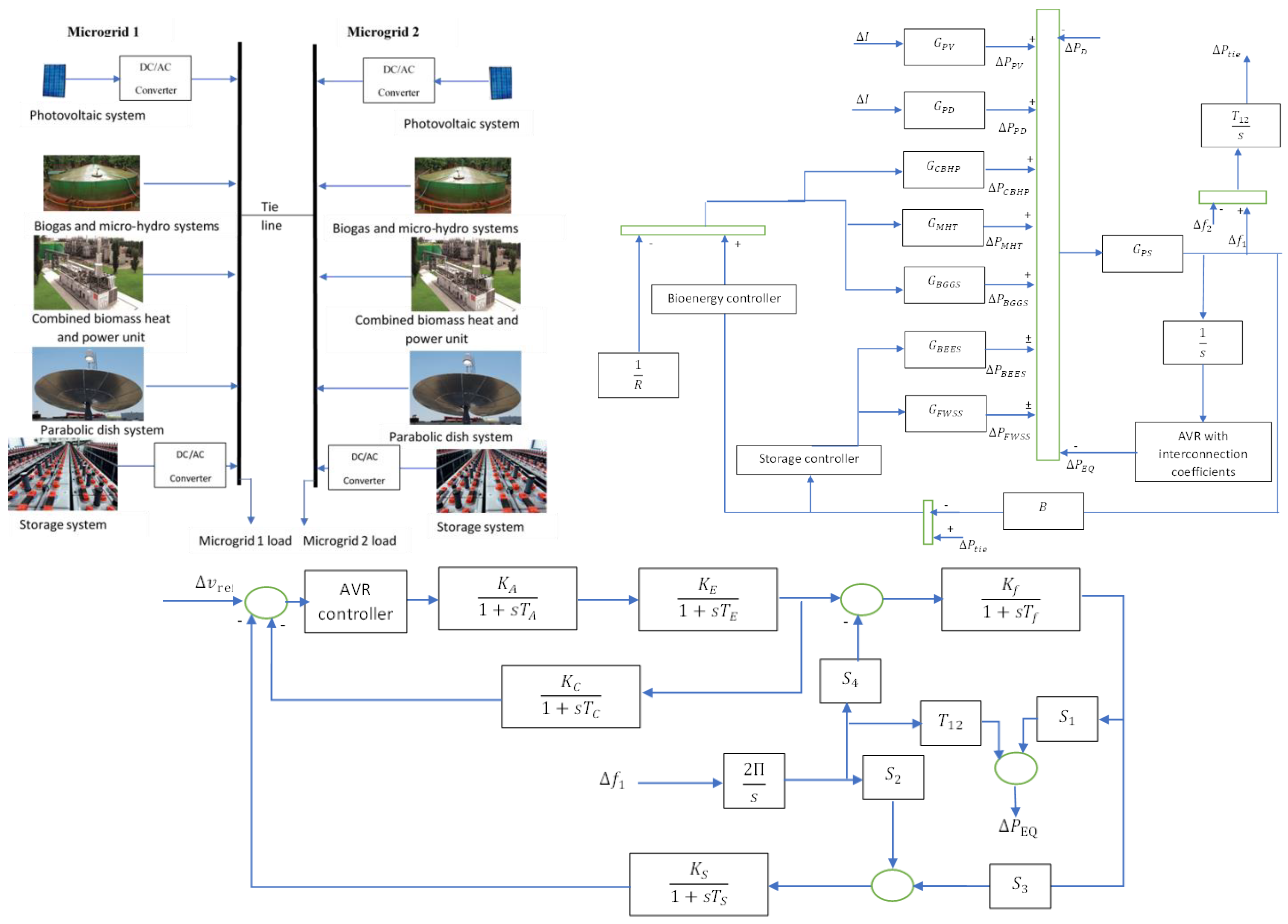
2. 100% Renewable Energy Interconnected Microgrids
2.1. Bioenergy Technologies
2.1.1. Combined Biomass Heat and Power Unit (CBHP)
2.1.2. Micro-Hydro Turbine Unit (MHT)
2.1.3. Biogas Unit (BG)
2.2. Solar Energy Technologies
2.2.1. PV Unit
2.2.2. PD Unit
2.3. Energy Storage Systems
2.4. Microgrids Equations
3. System Control
3.1. LFC and AVR Interconnection
3.2. Control Schemes
4. Optimization Problem
4.1. Optimization Problem Definition
4.2. DPO Design
4.2.1. Stage 1: Vaccination Stage
4.2.2. Stage 2: Drug Administration
4.2.3. Stage 3: Surgery
4.3. Indicators
5. Simulation Results
5.1. Test 1: Comparison between Different Optimization Techniques
5.2. Test 2: Comparison between Different Control Schemes
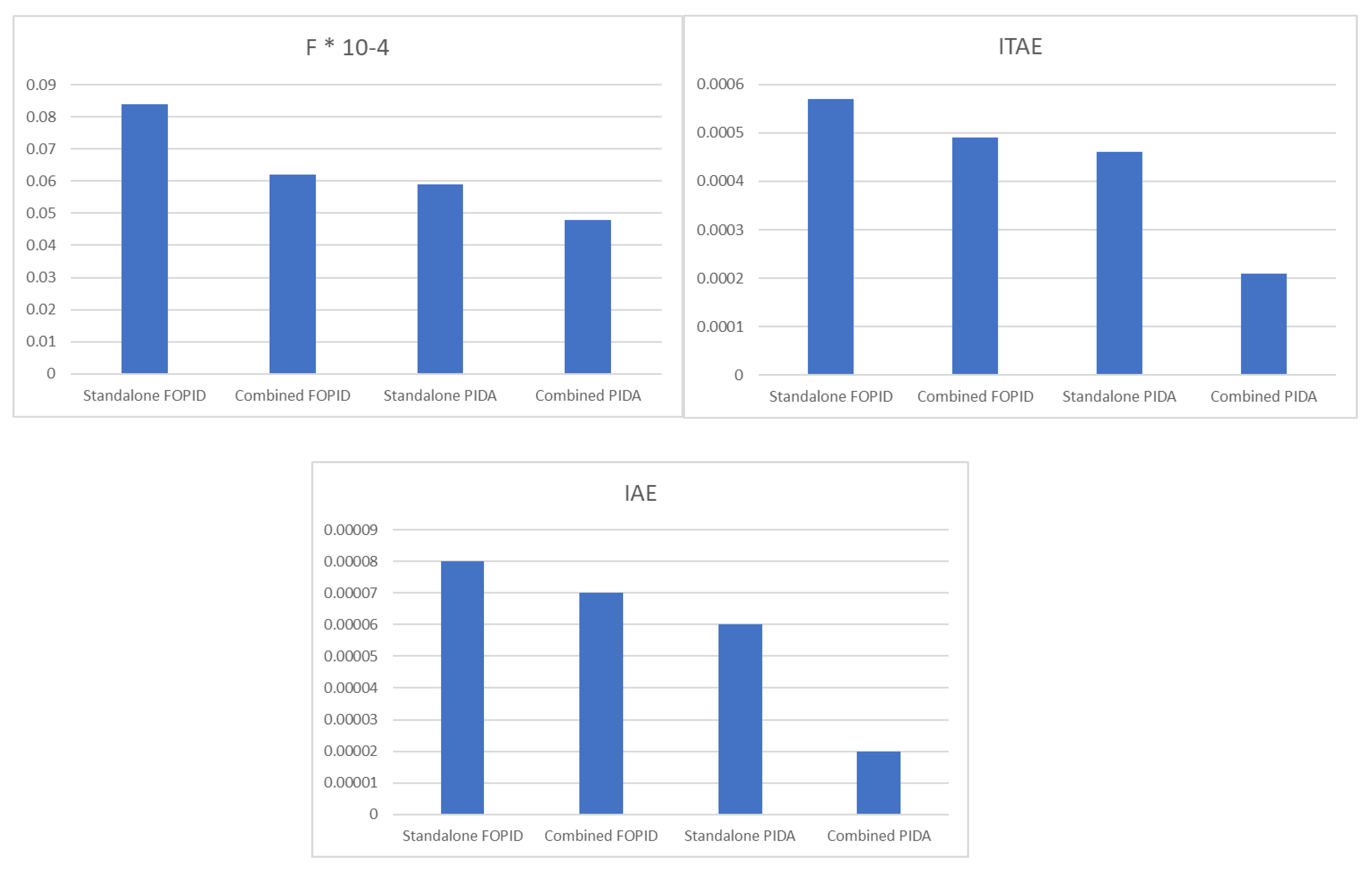
5.3. Test 3: Comparison between Combined Design of AVR-LFC Controllers and Standalone Design of AVR and LFC Controllers
6. Discussions
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Barik, A.K.; Das, D.C. Expeditious frequency control of solar photovoltaic/biogas/biodiesel generator based isolated renewable microgrid using grasshopper optimisation algorithm. IET Renew. Power Gener. 2018, 12, 1659–1667. [Google Scholar] [CrossRef]
- Bai, C.; Sarkis, J. The Water, Energy, Food, and Sustainability Nexus Decision Environment: A Multistakeholder Transdisciplinary Approach. IEEE Trans. Eng. Manag. 2019, 3, 656–670. [Google Scholar] [CrossRef]
- Rasul, M.G.; Ault, C.; Sajjad, M. Bio-gas mixed fuel micro gas turbine cogeneration for meeting power demand in Australian remote areas. Energy Proc. 2015, 75, 1065–1071. [Google Scholar] [CrossRef]
- Renewable Energy Policy Network for the 21st CENTURY Annual Report 2017. Available online: https://www.ren21.net (accessed on 3 April 2022).
- Liguori, V. Numerical investigation: Performances of a standard biogas in a 100 kWe MGT. Energy Rep. 2016, 2, 99–106. [Google Scholar] [CrossRef] [Green Version]
- Abdalla, O.H.; Fayek, H.H.; Abdel Ghany, A.G.M. Secondary and Tertiary Voltage Control of a Multi-Region Power System. Electricity 2020, 1, 37–59. [Google Scholar] [CrossRef]
- Corsi, S. Voltage Control and Protection in Electrical Power Systems: From System Components to Wide-Area Control; Springer: New York, NY, USA, 2015. [Google Scholar]
- Fayek, H.H.; Kotsampopoulos, P. Central Tunicate Swarm NFOPID-Based Load Frequency Control of the Egyptian Power System Considering New Uncontrolled Wind and Photovoltaic Farms. Energies 2021, 14, 3604. [Google Scholar] [CrossRef]
- Abdalla, O.H.; Ghany, A.M.A.; Fayek, H.H. Coordinated PID secondary voltage control of a power system based on genetic algorithm. In Proceedings of the 2016 Eighteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 27–29 December 2016; pp. 214–219. [Google Scholar] [CrossRef]
- Micev, M.; Ćalasan, M.; Oliva, D. Fractional Order PID Controller Design for an AVR System Using Chaotic Yellow Saddle Goatfish Algorithm. Mathematics 2020, 8, 1182. [Google Scholar] [CrossRef]
- Pahadasingh, S.; Jena, C.; Panigrahi, C.K. Load frequency control incorporating electric vehicles using FOPID controller with HVDC link. In Innovation in Electrical Power Engineering, Communication, and Computing Technology; Sharma, R., Mishra, M., Nayak, J., Naik, B., Pelusi, D., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2020; Volume 630. [Google Scholar]
- Fayek, H.H. Load Frequency Control of a Power System with 100% Renewables. In Proceedings of the 2019 54th International Universities Power Engineering Conference (UPEC), Bucharest, Romania, 3–6 September 2019; pp. 1–6. [Google Scholar]
- Fayek, H.H. 5G Poor and Rich Novel Control Scheme Based Load Frequency Regulation of a Two-Area System with 100% Renewables in Africa. Fractal Fract. 2021, 5, 2. [Google Scholar] [CrossRef]
- Fayek, H.H.; Mohammadi-Ivatloo, B. Tidal Supplementary Control Schemes-Based Load Frequency Regulation of a Fully Sustainable Marine Microgrid. Inventions 2020, 5, 53. [Google Scholar] [CrossRef]
- Abdalla, O.H.; Fayek, H.H.; Abdel Ghany, A.M. Secondary Voltage Control Application in a Smart Grid with 100% Renewables. Inventions 2020, 5, 37. [Google Scholar] [CrossRef]
- Barik, A.K.; Das, D.C. Coordinated regulation of voltage and load frequency in demand response supported biorenewable cogeneration-based isolated hybrid microgrid with quasi-oppositional selfish herd optimisation. Int. Trans. Electr. Energ. Syst. 2020, 30, e12176. [Google Scholar] [CrossRef]
- Nahas, N.; Abouheaf, M.; Sharaf, A.; Gueaieb, W. A Self-Adjusting Adaptive AVR-LFC Scheme for Synchronous Generators. IEEE Trans. Power Syst. 2019, 34, 5073–5075. [Google Scholar] [CrossRef]
- Goswami Mishra Goswami, K.; Mishra, L. Load Frequency and Voltage Control of Two Area Interconnected Power System using PID Controller. IJERT 2017, 4, 301–315. [Google Scholar]
- Rajbongshi, R.; Saikia, L.C. Performance of coordinated FACTS and energy storage devices in combined multiarea ALFC and AVR system. J. Renew. Sustain. Energy 2017, 9, 064101. [Google Scholar] [CrossRef]
- Nabil, N.; Mohammed, A.; Mohamed, D.; Sharaf, A.M. A multi-objective AVR-LFC optimization scheme for multi-area power systems. Electr. Power Syst. Res. 2021, 200, 107467. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S.; Rambabu, K.; Kumar, M.K.; Goud, B.S.; Reddy, C.R. Exhibiting the Effect of AVR Coupling on the Performance of LFC in Multi Area Hybrid Power System. In Proceedings of the 2022 3rd International Conference for Emerging Technology (INCET), Karnataka, India, 27–29 May 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Dehghani, M.; Mardaneh, M.; Guerrero, J.M.; Malik, O.P.; Ramirez-Mendoza, R.A.; Matas, J.; Vasquez, J.C.; Parra-Arroyo, L. A New “Doctor and Patient” Optimization Algorithm: An Application to Energy Commitment Problem. Appl. Sci. 2020, 10, 5791. [Google Scholar] [CrossRef]
- Ghoshal, S.P. Optimizations of PID gains by particle swarm optimizations in fuzzy based automatic generation control. Electr. Power Syst. Res. 2004, 72, 203–212. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.A.; Lewis, A. Grasshopper Optimization Algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef] [Green Version]
- Kumar, M.; Kulkarni, A.J.; Satapathy, S.C. Socio evolution & learning optimization algorithm: A socio-inspired optimization methodology. Future Gener. Comput. Syst. 2018, 81, 252–272. [Google Scholar]
- SEKEM ElWahat Website. Available online: https://www.sekem.com/en/tag/wahat/ (accessed on 3 May 2022).
- Sekem Energy Website. Available online: https://www.sekemenergy.com/index.php/en/ (accessed on 3 May 2022).
- Fayek, H.H.; Abdalla, O.H. Operation of the Egyptian Power Grid with Maximum Penetration Level of Renewable Energies Using Corona Virus Optimization Algorithm. Smart Cities 2022, 5, 34–53. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Nomenclature | Value |
|---|---|---|
| TPV | PV time constant | 1.8 s |
| KPD | Parabolic dish gain | 1 |
| TT | Parabolic dish time constant | 0.3 s |
| KBC | Participation factor of CBHP | 0.33 |
| TBC | Time constant of speed governor | 0.2 s |
| KR | Turbine gain | 0.3 |
| TR | Time constant of turbine | 10 s |
| TBCT | Time constant of reheat | 0.3 s |
| KMG | Participation factor of MHT | 0.33 |
| THG | Transient droop | 0.2 s |
| TRS | Governor delay | 5 s |
| TRH | Reset | 28.75 s |
| THT | Turbine delay | 1 s |
| KBGGS | Participation factor of BG | 0.33 |
| TCR | Combustion reaction delay | 0.01 s |
| TBG | Biogas delay | 0.23 s |
| Xc | Lead time | 0.6 s |
| Yc | Lag time | 1 s |
| bB | Valve actuator | 0.05 |
| TBT | Discharge time constant | 0.2 s |
| KBESS | Battery gain | 0.0033 |
| TBESS | Battery time constant | 0.1 s |
| KFWSS | Flywheel gain | 0.01 |
| TFWSS | Flywheel time constant | 0.1 s |
| Meq | System inertia | 0.2 s |
| D | Damping constant of the power system | 0.012 |
| B | Frequency bias factor | 18.4 |
| T12 | Synchronized power | 1.9 |
| Δf1, Δv1 | Change in microgrid 1 frequency and voltage | |
| Δf2 and Δv2 | Change in microgrid 2 frequency and voltage | |
| S1, S2, S3 and S4 | Coupling coefficients of AVR | 0.2, −0.1, 0.5, and 1.4 |
| ΔPEQ, ΔEf, ΔEe and ΔEu | Deviation in equivalent power due to AVR, field response, exciter response, error in voltage | |
| ΔO1 and ΔO2 | Combined effect and controller action of AVR | |
| KA, TA, KE, TE, Kf, Tf, KC, TC, Ks and Ts | Amplifier, exciter, field, compensator, sensor gains, and time constants of the AVR | 40, 0.05 s, 1.0, 0.55 s, 0.8,1.4 s, 0.5, 0.715 s, 1.0, and 0.05 s. |
| KP, KI and KD | PID controller gains | |
| and µ | Integral and derivative powers in FOPID controller | |
| G | Nonlinear gain in NPID | |
| KC1, KC2, KC3, KC4, KC5, KC6 and KC7 | PIDA controller gains | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fayek, H.H.; Rusu, E. Novel Combined Load Frequency Control and Automatic Voltage Regulation of a 100% Sustainable Energy Interconnected Microgrids. Sustainability 2022, 14, 9428. https://doi.org/10.3390/su14159428
Fayek HH, Rusu E. Novel Combined Load Frequency Control and Automatic Voltage Regulation of a 100% Sustainable Energy Interconnected Microgrids. Sustainability. 2022; 14(15):9428. https://doi.org/10.3390/su14159428
Chicago/Turabian StyleFayek, Hady H., and Eugen Rusu. 2022. "Novel Combined Load Frequency Control and Automatic Voltage Regulation of a 100% Sustainable Energy Interconnected Microgrids" Sustainability 14, no. 15: 9428. https://doi.org/10.3390/su14159428
APA StyleFayek, H. H., & Rusu, E. (2022). Novel Combined Load Frequency Control and Automatic Voltage Regulation of a 100% Sustainable Energy Interconnected Microgrids. Sustainability, 14(15), 9428. https://doi.org/10.3390/su14159428