
The Relationship between Innovative Technology and Driver’s Resistance and Acceptance Intention for Sustainable Use of Automobile Self-Driving System

Abstract
:1. Introduction
2. Theoretical Background
2.1. Automobile Autonomous Driving System
2.2. Innovation Characteristics and Technology Acceptance Model (TAM)
2.3. Innovation Resistance
2.4. Acceptance Intention
3. Research Design and Methodology
3.1. Subjects of Investigation
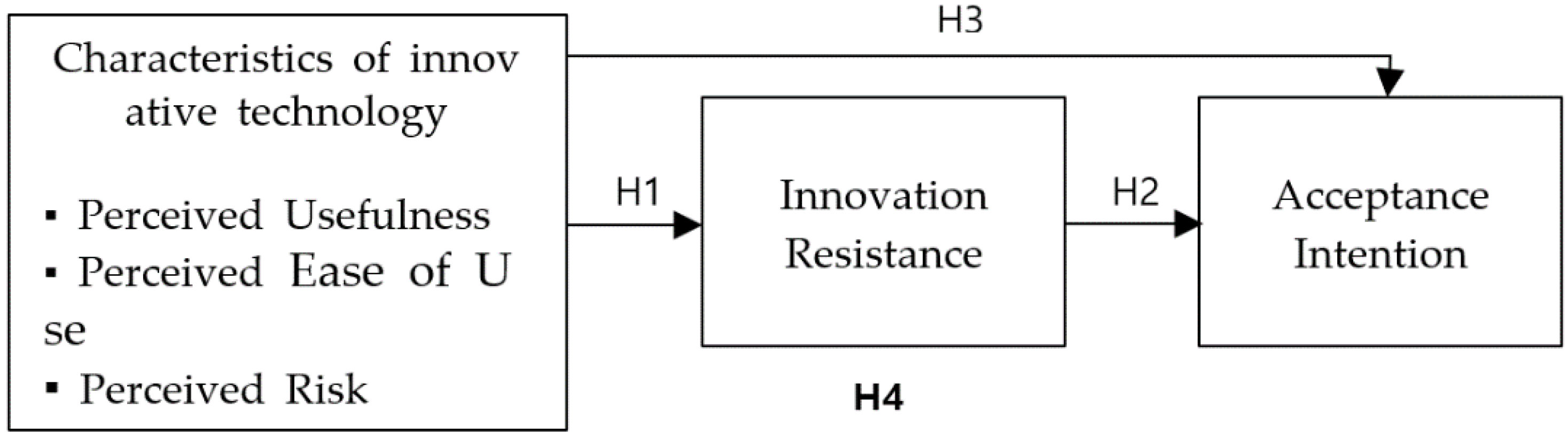
3.2. Research Models and Hypotheses
3.3. Measurement
3.3.1. Innovation Characteristics of the Autonomous Driving System
3.3.2. Innovation Resistance
3.3.3. Acceptance Intention
3.4. Data Processing
4. Results
4.1. Verification of Reliability and Validity of Measurement Tools
4.2. Verification of Research Hypothesis
5. Discussion
6. Conclusions and Suggestions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ram, S. A model of innovation resistance. NA-Adv. Consum. Res. 1987, 14, 56–65. [Google Scholar]
- Jung, H.S. A Study on the Innovation Resistance of Non-adoptors in New Media: Focusing on Digital Transition of Terrestrial TV Broadcasting. Ph.D. Thesis, Kwanwoon University, Chooncheon, Korea, 2014. [Google Scholar]
- Sheth, J.N.; Ram, S. Consumer Resistance to Innovations: The Marketing Problem and Its Solutions. J. Consum. Mark. 1989, 6, 5–14. [Google Scholar]
- Yoon, S.K.; Kim, M.J.; Choi, J.H. Effects of Innovation Characteristics and User Characteristics on the Adopting e-Books: Focused on Innovation Resistance Model. J. Korea Content 2014, 14, 61–73. [Google Scholar] [CrossRef]
- Seo, H.M. A Study on the Consumer Innovation Resistance to Sport-ICT Convergence Technology of Professional Sport Team: Focusing on wizzap service. Korean Soc. Sport Manag. 2016, 21, 59–72. [Google Scholar]
- Moldovan, S.; Goldenberg, J. Cellular Automata Modeling of Resistance to Innovations: Effects and Solutions. Technol. Forecast. Soc. Chang. 2006, 71, 425–442. [Google Scholar] [CrossRef]
- Shin, J.G.; Lee, S.W. A Study of Intention to Use Wrist-worn Wearable Devices Based on Innovation Resistance Model-Focusing on the Relationship between Innovation Characteristics, Consumer Characteristics, and Innovation Resistance. J. Korea Contents 2016, 16, 123–134. [Google Scholar] [CrossRef]
- Ajzen, I. From Intentions to Actions: A Theory of Planned Behavior. In Action Control. SSSP Springer Series in Social, Psychology; Kuhl, J., Beckmann, J., Eds.; Springer: Berlin, Heidelberg, 1985. [Google Scholar]
- Venkatesh, V.; Davis, F.D. A Theoretical Extension of the Technology Acceptance Model: Four Longitudinal Field Studies. Manag. Sci. 2000, 46, 186–204. [Google Scholar] [CrossRef]
- Cho, B.J.; Lee, J.S. Adoption Factors of Smart Watch: Focusing on Moderate Effects of Innovation Resistance. Korean J. Broadcasting Commun. Stud. 2016, 93, 111–136. [Google Scholar]
- Ram, S. Successful Innovation Using Strategies to Reduce Consumer Resistance An Empirical Test. J. Prod. Innov. Manag. 1989, 6, 20–34. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, J.H.; Park, H.J. A Study on Innovation Resistance to Home IoT Provided by Telecom Operators. Entrue J. Inf. Technol. 2017, 16, 25–40. [Google Scholar]
- Kim, H.J.; Ahn, S.D. Factor Analysis of the Acceptance of Convergence ICT by Farmers and the Role of Agricultural Cooperatives: A Focus on Smart Farms. Korean J. Coop. Stud. 2018, 36, 115–135. [Google Scholar]
- Song, J.H.; Kim, S.H.; Jeong, U. A study on how the users’ acceptance attitude toward social commerce selling hotel products affects on trust and usage intention: Using extended technology acceptance model. Korean J. Hosp. Tour. 2018, 27, 85–101. [Google Scholar] [CrossRef]
- Lee, K.S.; Yu, J.P.; Lim, S.A. A Study on Factors Affecting the Intention to Use Artificial Intelligence(AI) Speakers: Focusing on the Extended Technology Acceptance Model(E-TAM). Soc. Converg. Knowl. Trans. 2000, 8, 59–69. [Google Scholar]
- Jeon, H.S.; Ko, S.J. Direction of Autonomous Vehicle Technology; Korea Transport Institute: Seoul, Korea, 2015. [Google Scholar]
- Society of Automotive Engineers. 2013. Available online: https://www.sae.org/ (accessed on 23 April 2022).
- National Highway Transportation Agency. 2013. Available online: https://www.nhtsa.gov/ (accessed on 23 April 2022).
- Kim, J.P. Legal Liability and Insurance System of Autonomous Driving Accident. Ph.D. Thesis, Jeonju University, Jeju, Korea, 2018. [Google Scholar]
- Korea Ministry of Land, Infrastructure and Transport. Establishment of the World’s First Partial Self-Driving Vehicle (Level 3) Safety Standards. 2020. Available online: http://www.molit.go.kr/ (accessed on 23 April 2022).
- United States Deptartment of Transportation. Preparing for the Future of Transportation: Automated Vehicles 3.0; 2018. Available online: https://www.transportation.gov/av/3 (accessed on 23 April 2022).
- Davis, F.D.; Bagozzi, R.P.; Warshaw, P.R. User acceptance of computer technology: A comparison of two theoretical models. Manag. Sci. 1989, 35, 962–1003. [Google Scholar] [CrossRef]
- Kim, K.S.; Jeon, H.J.; Shin, J.W. Consumers’ Smart Grid Acceptance Model: Structural Equation Modeling Approach. Korean Energy Econ. Rev. 2010, 9, 101–128. [Google Scholar]
- Rahmana, M.M.; Leschb, M.F.; Horrey, W.J.; Strawdermana, L. Assessing the utility of TAM, TPB, and UTAUT for advanced driver assistance systems. Accid. Anal. Prev. 2017, 108, 361–373. [Google Scholar] [CrossRef] [PubMed]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Kuhn, M.; Marquardt, V. What-are-you-looking-at?: Implicit Behavioural Measurement Indicating Technology Acceptance in the Field of Automated Driving. In Proceedings of the Academy of Marketing Science Annual Conference, Paris, France, 13–15 June 2019; pp. 595–606. [Google Scholar]
- Casidy, R.; Claudy, M.; Heidenreich, S.; Camurdan, E. The role of brand in overcoming consumer resistance to autonomous vehicles. Psychol. Mark. 2021, 38, 1101–1121. [Google Scholar] [CrossRef]
- Waytz, A.; Heafner, J.; Epley, N. The mind in the machine: Anthropomorphism increases trust in an autonomous vehicle. J. Exp. Soc. Psychol. 2014, 52, 113–117. [Google Scholar] [CrossRef]
- Sheth, J.N. Psychology of innovation resistance: The less developed concept(LDS) in diffusion research. Res. Mark. 1981, 4, 273–282. [Google Scholar]
- Rogers, E. Diffusion of Innovations, 3rd ed.; The Free Press: New York, NY, USA, 2003. [Google Scholar]
- Chen, Y.S.; Lin, M.J.; Chang, C.H. The Positive Effects of Relationship Learning and Absorptive Capacity on Innovation Performance and Competitive Advantage in Industrial Markets. Ind. Mark. Manag. 2009, 38, 152–158. [Google Scholar] [CrossRef]
- Schiffman, L.G.; Kanuk, L. Consumer Behavior; Prentice Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Kim, J.H.; Sin, Y.S. The Roles of Mediated to Consumers’ Resistance in the Internet Service Acceptance Processing. Korean Ind. Econ. Assoc. 2002, 12, 85–98. [Google Scholar]
- Shin, J.K. A Study of Innovation Resistance among Wearable Device Non-Users and Users. Master’s Thesis, Yonsei University, Seoul, Korea, 2016. [Google Scholar]
- Oh, H.J.; Yoon, Y.S.; Lee, K.Y. An Empirical Study on the Determinants of Trust and Purchasing Intention in Online Shopping. J. Ind. Econ. Bus. 2006, 19, 205–224. [Google Scholar]
- Lim, S.H.; Lee, C.K.; Cha, K.J. The Innovation Resistance of IT Workforce to Mobile Commerce. J. Soc. e-Bus. Stud. 2015, 20, 61–78. [Google Scholar] [CrossRef]
- Arts, J.W.; Frambach, R.T.; Bijmolt, T.H. Generalizations on consumer innovation adoption: A meta-analysis on drivers of intention and behavior. Int. J. Res. Mark. 2011, 28, 134–144. [Google Scholar] [CrossRef]
- Bae, J.K. The Structural Relationships among Innovation Characteristics, Consumer Characteristics, Innovation Resistance, and Intention to Acceptance of Wearable Device Customers: Based on Innovation Resistance Model and Theory of Perceived Risk. J. Inf. Syst. 2016, 25, 87–104. [Google Scholar]
- Kim, S.G. The Effect of Consumers’ Innovation Resistance to FinTech Service on Intention to Recommend. Ph.D. Thesis, Kangwon National University, Chooncheon, Korea, 2018. [Google Scholar]
- Yoon, E.J. The Effects of Security and Privacy Risks for the Cloud Computing Acceptance Intention in the Companies. Master’s Thesis, Dong-Eui University, Busan, Korea, 2012. [Google Scholar]
- Hong, S.H. The Criteria for Selecting Appropriate Fit Indices in Structural Equation Modeling and Their Rationales. Korean J. Clin. Psychol. 2000, 19, 161–177. [Google Scholar]
- Hu, L.T.; Bentler, P.M. Cutoff Criteria for Indexes in Covariance Structure Analysis: Conventional Criteria versus New Alternatives. Struct. Equ. Model. 1999, 6, 1–55. [Google Scholar] [CrossRef]
- Browne, M.W.; Cudeck, R. Alternative ways of assessing model fit. In Testing Structural Equation Models; Bollen, K.A., Long, J.S., Eds.; Sage: Thousand Oaks, CA, USA, 1993. [Google Scholar]
- Rogers, E.M. A Prospective and Retrospective Look at the Diffusion Model. J. Health Commun. 2004, 9, 13–19. [Google Scholar] [CrossRef]
- Jang, J.H. The Effects of Innovation Characteristics and User Innovation on Acceptance Intention of Self-driving Car System. Master’s Thesis, Korea University, Seoul, Korea, 2019. [Google Scholar]
- Shin, W.C. Effects of Innovation Characteristics of Cloud Computing Services, Techno-Stress on Innovation Resistance and Acceptance Intention: Focused on Public Sector. Ph.D. Thesis, Kookmin University, Seoul, Korea, 2019. [Google Scholar]
- Choi, H. A Study on the Effects of Product Characteristics of Digital Convergence on Acceptance Intention via Perceived Usefulness and Ease of Use: The moderating effects of gamification. Master’s Thesis, Jeonbuk University, Jeonju-si, Korea, 2016. [Google Scholar]

{kind=link}
| Step | Sortation | Definition |
|---|---|---|
| Step 0 | Deautomation | Regular cars without self-driving capabilities |
| Step 1 | Driver assistance function | Automatic brake, automatic speed adjustment, etc., driving assistance |
| Step 2 | Partial autonomous driving | Two or more automation functions are operated simultaneously while the driver is driving, partial autonomous driving, and constant supervision of the driver is required |
| Step 3 | Conditional autonomous driving | Limited autonomous driving by artificial intelligence in automobiles is possible, but driver intervention is essential depending on specific situations |
| Step 4 | Advanced self-driving | No driver intervention or monitoring is required when driving in a road environment including on-site driving |
| Step 5 | Full automation | No driver intervention required in all environments |
| Level | Definition |
|---|---|
| Level 0 | Driver controls all movements |
| Level 1 | Initial operation autonomy (automatic emergency stop, constant speed driving ACC) |
| Level 2 | Automate more than one rudimentary operation |
| Level 3 | Automate to monitor everything around driver |
| Level 4 | Fully autonomous driving without the need for a driver |
| NHTSA Level | SAE Level | Definition of Autonomous Level | Characteristics | |
|---|---|---|---|---|
| 0 | 0 | No automation | No support | |
| 1 | 1 | Driver assistance | Provides driving information, generates alerts, and supports some controls | |
| 2 | 2 | Automated | Partial automation | Automates some of the vehicle controls according to driver selection in special circumstances |
| 3 | 3 | Automated | Conditional automation | Automates all vehicle controls, driver manually/automatically selected |
| 4 | 4 | Autonomous | High automation | The vehicle can drive on its own in all traffic conditions. Commercialization distance, legal/institutional problem resolution required |
| 4 | 5 | Autonomous | Full automation | The vehicle can drive on its own in all traffic situations without any legal or institutional problems |
| Variables | N | % | |
|---|---|---|---|
| Age | 20s | 122 | 21.5 |
| 30s | 262 | 46.2 | |
| 40s | 143 | 25.2 | |
| 50s and above | 40 | 7.1 | |
| Occupation | Office workers/public officials | 376 | 66.3 |
| Housewife | 138 | 24.3 | |
| Student | 32 | 5.6 | |
| Professional/self-employed person, | 18 | 3.2 | |
| etc. | 3 | 0.5 | |
| Monthly Income | Less than KRW 2 million | 87 | 15.3 |
| KRW 2∼4 million | 159 | 28.0 | |
| KRW 4∼6 million | 162 | 28.6 | |
| More than KRW 6 million | 159 | 28.0 | |
| Driving Experience | less than a year | 23 | 4.1 |
| 1∼3 years | 121 | 21.3 | |
| 3∼5 years | 135 | 23.8 | |
| More than 5 years | 288 | 50.8 | |
| Total | 567 | 100.0 | |
| Variables | Number of Items | Cronbach’s α | |
|---|---|---|---|
| Innovation Characteristics | Perceived usefulness | 3 | 0.809 |
| Innovation Characteristics | Perceived ease of use | 3 | 0.868 |
| Innovation Characteristics | Perceived risk | 3 | 0.731 |
| Innovation Resistance | 5 | 0.860 | |
| Acceptance Intention | 3 | 0.833 | |
| Variables | Item | Non -Standardized Factor Loading | Standardized Factor Loading | Standard Error | t | Construct Reliability | Average Variance Extracted | |
|---|---|---|---|---|---|---|---|---|
| Perceived Usefulness | → | PU 1 | 1.000 | 0.873 | 0.910 | 0.774 | ||
| → | PU 2 | 0.927 | 0.047 | 0.839 | 19.927 *** | 0.910 | 0.774 | |
| → | PU 3 | 0.690 | 0.048 | 0.593 | 14.271 *** | 0.910 | 0.774 | |
| Perceived Ease of Use | → | UA 2 | 1.000 | 0.773 | 0.890 | 0.730 | ||
| → | UA 3 | 1.213 | 0.057 | 0.886 | 21.206 *** | 0.890 | 0.730 | |
| → | UA 4 | 1.103 | 0.055 | 0.826 | 20.141 *** | 0.890 | 0.730 | |
| Perceived Risk | → | PR 1 | 1.000 | 0.673 | 0.818 | 0.600 | ||
| → | PR 2 | 1.122 | 0.088 | 0.750 | 12.705 *** | 0.818 | 0.600 | |
| → | PR 3 | 0.918 | 0.078 | 0.640 | 11.810 *** | 0.818 | 0.600 | |
| Innovation Resistance | → | IR 1 | 1.000 | 0.708 | 0.891 | 0.670 | ||
| → | IR 3 | 1.229 | 0.074 | 0.766 | 16.574 *** | 0.891 | 0.670 | |
| → | IR 4 | 1.274 | 0.075 | 0.784 | 16.916 *** | 0.891 | 0.670 | |
| → | IR 5 | 1.256 | 0.075 | 0.779 | 16.819 *** | 0.891 | 0.670 | |
| Acceptance Intention | → | AI 1 | 1.000 | 0.865 | 0.893 | 0.737 | ||
| → | AI 2 | 1.090 | 0.043 | 0.888 | 25.100 *** | 0.893 | 0.737 | |
| → | AI 3 | 0.835 | 0.049 | 0.654 | 16.951 *** | 0.893 | 0.737 | |
| Variables | Innovation Characteristics | Innovation Resistance | Acceptance Intention | ||
|---|---|---|---|---|---|
| Perceived Usefulness | Perceived Ease of Use | Perceived Risk | |||
| Perceived Usefulness | 0.774 | (0.115) | (0.059) | (0.265) | (0.238) |
| Perceived Ease of Use | 0.339 *** | 0.730 | (0.359) | (0.193) | (0.161) |
| Perceived Risk | –0.243 *** | –0.599 *** | 0.600 | (0.093) | (0.138) |
| Innovation Resistance | –0.515 *** | –0.439 *** | 0.305 *** | 0.670 | (0.549) |
| Acceptance Intention | 0.488 *** | 0.401 *** | –0.372 *** | –0.741 *** | 0.737 |
| Path | B | SE | β | T (C.R) | p | ||
|---|---|---|---|---|---|---|---|
| Perceived Usefulness | → | Innovation Resistance | −0.195 | 0.046 | −0.216 | −4.235 | 0.000 |
| Perceived Ease of Use | → | Innovation Resistance | −0.125 | 0.046 | −0.161 | −2.738 | 0.006 |
| Perceived Risk | → | Innovation Resistance | 0.033 | 0.060 | 0.032 | 0.549 | 0.583 |
| Innovation Resistance | → | Acceptance Intention | −0.646 | 0.079 | −0.512 | −8.203 | 0.000 |
| Perceived Usefulness | → | Acceptance Intention | 0.055 | 0.053 | 0.047 | 1.044 | 0.297 |
| Perceived Ease of Use | → | Acceptance Intention | −0.076 | 0.052 | −0.077 | −1.460 | 0.144 |
| Perceived Risk | → | Acceptance Intention | −0.149 | 0.068 | −0.118 | −2.201 | 0.028 |
| Path | Indirect Effect | ||||||
|---|---|---|---|---|---|---|---|
| Non-Standardized Coefficient | Standard Error | Standardized Coefficient | 95% CI | p | |||
| Perceived Usefulness | Resistance | Acceptance Intention | 0.402 | 0.088 | 0.378 | (0.145~0.448) | 0.000 |
| Perceived Ease of Use | Resistance | Acceptance Intention | 0.388 | 0.090 | 0.355 | (0.094~0.387) | 0.007 |
| Perceived Risk | Resistance | Acceptance Intention | −0.316 | 0.074 | −0.289 | (−0.213~−0.089) | 0.011 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.-K. The Relationship between Innovative Technology and Driver’s Resistance and Acceptance Intention for Sustainable Use of Automobile Self-Driving System. Sustainability 2022, 14, 10129. https://doi.org/10.3390/su141610129
Lee H-K. The Relationship between Innovative Technology and Driver’s Resistance and Acceptance Intention for Sustainable Use of Automobile Self-Driving System. Sustainability. 2022; 14(16):10129. https://doi.org/10.3390/su141610129
Chicago/Turabian StyleLee, Hyo-Keun. 2022. "The Relationship between Innovative Technology and Driver’s Resistance and Acceptance Intention for Sustainable Use of Automobile Self-Driving System" Sustainability 14, no. 16: 10129. https://doi.org/10.3390/su141610129
APA StyleLee, H.-K. (2022). The Relationship between Innovative Technology and Driver’s Resistance and Acceptance Intention for Sustainable Use of Automobile Self-Driving System. Sustainability, 14(16), 10129. https://doi.org/10.3390/su141610129