Abstract
As a result of the trend towards auto intelligence and greening of vehicles and with the concept of polymorphic network being put forward, the power transmission mode between seaports and all-electric ships (AESs) is likely to be converted to “peer-to-peer” transmission. According to practical shore power systems and carbon trade mechanisms, an advanced peer-to-peer power dispatching model-joint seaport-AESs microgrid(MG) system has been proposed in the paper. The joint seaport–AES system model is proposed to minimize the total operational cost of power production and marketing, including distributed generation (DG) cost, electricity trading cost, and carbon emissions, and the boundary conditions are given as well. A parameter projection distributed optimization (PPDO) algorithm is utilized to solve the distributed optimization power operation planning of the proposed joint seaport–AES MG system under a polymorphic network and to guarantee the precision of power dispatching, which compensates for the insufficiency of the computing power. Finally, a case study of a five-node polymorphic joint seaport-AESs system is conducted. The feasibility of the parameter projection approach and the peer-to-peer power dispatching model are verified via the convergence of all the agents within the constraint sets.
1. Introduction
In recent years, global climate change has caused alarm. A spate of extreme weather has represented a statistical quirk, and the problem of carbon emission has attracted more and more attention. Due to the 9.6% increase of the greenhouse gas emissions from shipping from 2012 to 2018 [1], the marine industry has reoriented itself toward low-carbon development by invoking the port–shore power system, launching large all-electric ships (AESs) for trial voyages. For example, the first all-electric ferry of the world (driven entirely by batteries) was officially put into operation in Sognafjord in western Norway on 19 May 2015; the world’s first 1000 ton AES was hoisted and launched in Guangzhou, China on 12 November 2017. The greening of port and ship energy is an irreversible development trend.
Due to the high proportion of new energy and AESs, power dispatching, as an essential component of seaports, is garnering extensive attention from scholars. As an efficient power dispatching technology that is suitable for distributed energy owned district, microgrids have been focused on in seaports, AES and other related fields in recent years. Regarding seaports, Ref. [2] considers large ports with flexible loads such as refrigerated containers, etc., in order to reduce the port operation cost due to the cost of wind farms. According to many decision variables and constraints in large ports, Ref. [3] aimed to reduce the operation cost while maintaining the system’s performance. Considering electricity pricing of seaports’ grids, Ref. [4] deals with uncertainy of renewable energy generation as it pertains to the power dispatching under bidirectional power trading mode. AESs, whether in navigation or in port, are viewed as a “mobile microgrid” [5]. Considering battery cycle degradation of AES’s shipboard microgrid, Fang proposes a two-step multi-objective optimization to improve both the economic and environmental index [5].
The emergence of AESs and the development of information communication technology has challenged the unidirectional power transmission mode of legacy seaport microgrids, namely, the grid-to-point power interconnection mode has been challenged. At the same time, considering their plug-and-play, sharing and opening characteristics, AESs equipped with both power loads and supplies will no longer simply act as terminal users of a seaport grid. Their role as power suppliers will be greatly improved and ultimately realize a shift from power consumer to prosumer. Thus, more power options will be provided to power terminals, bringing about an irreversible change in power modes between seaports and AESs. The port center will be weakened, and the traditional centralized power dispatching strategy will inevitably struggle to to deal with the plug-and-play multi-microgrid (MMG) mode [6]. The power transmission mode between seaports and AESs will be converted to “peer-to-peer”.
In the essence, power dispatching problem is a kind of optimization problem that involves using power balancing and devices’ full function by comprehensively scheduling and utilizing heterogeneous resources to minimize the overall operation cost of the network. Therefore, as the mode of joint seaport-AESs power scheduling changes to the multi-MG mode, the power dispatching strategy appears to leaning towards the distributed optimization algorithm for the following points: (1) The seaport is geographically and physically independent of the AES, and both are deemed stand-alone microgrids. (2) Considering the complexity brought about by the characteristic of new energy; that is, intermittency and uncertainty, the existing calculations of seaport control central are insufficient and inefficient. The distributed optimization algorithm greatly alleviates the scheduling burden of seaport control central via the utilization of the computing resource of AESs. (3) High extensibility tallies with the plug-and-play feature of AESs, and privacy protection feature safeguard the interests of ship-owners and seaport enterprises concurrently. To account for these two modes, i.e., islanded and network-connected modes of AESs, a fully-distributed algorithm with dynamic event-triggered mechanism is proposed in [7,8] to settle the double-mode energy management problem. Compared with the centralized algorithms, distributed optimization algorithms with high extensibility, strong privacy and decentralization is more consistent with the peer-to-peer joint seaport-AESs system.
The peer-to-peer joint seaport-AESs system includes DGs, BESSs and other devices relevant to power supply and demand with their own work space. Thus, inequality constraints are imperative for the peer-to-peer joint seaport-AESs system mathematical model, which must be taken into consideration in distributed optimization algorithms. Studies of distributed optimization problems with inequality constraints can be classified into four types: the case of only inequality constraint, the case of inequality and bound constraints, the case of inequality and equality constraints and the case of general hybrid constraints. For the first case, namely single inequality constraint is the simplest case among them. As the process continues, subjected by coupled inequality constraints can be solved by a modified primal-dual continuous-time algorithm proposed by [9] without necessarily differentiable functions. For the second case, it now can be solved by a fully distributed algorithm proposed in [10] by a relaxation of the primal problem and an elegant exploration of duality theory. The nonlinear programming problems with separable objective function within the third case is addressed by two steps, with the reformulation of the original constrained problem into a continuously differentiable exact penalty function as a core [11]. And last but not least, a novel multiagent neurodynamic approach is proposed by [12], considering nonsmooth convex function solving confined by the local inequality constraints, local equality constraints, and local simple constraints.
Essentially, the peer-to-peer joint seaport-AESs system is a multi-agent system (MAS) that is central to the cooperative control and is inseparable from the communication network. However, when facing the large-scale, round-the-clock accession of ‘people-machines-objects’, the inability of the existing communication network to deal with the crisis is contributing to the volatility, especially in terms of scalability, customized services, mobility support, security and credibility [13]. In this regard, the construction of an open-ended, integrated, efficient and secure communication network is imminent. A polymorphic network is a brand new open network architecture based on a full dimensional and definable platform first proposed by Academician Wu Jiangxing in 2021 [14]. A polymorphic network solves a series of problems arising from multiplex networks and provides the possibility for a MAS that realizes thorough cooperative control.
Due to the auto intelligence trend in vehicles and the digitalization of the Internet in recent years, the structure of the above-mentioned joint seaport-AESs system as a MAS network needs to be upgraded and reconstructed. Therefore, the development of polymorphic smart network technology [15] and relevantly advanced algorithm make AES internal network, unmanned ships and smart ports better adapt to the new network environment.
Considering the limitation of communication resources, distributed algorithms are further studied. Based on connected undirected interaction graphs, a distributed least squares solver has been proposed to save energy and communication resources by layered calculation [16]. In 6G communication networks, an advanced federated learning, a kind of distributed computing paradigm, has proposed in vehicular edge computing with obvious communication advantages [17]. Close combination of the event-triggered control (ETC) and distributed algorithm has been extensively studied lasting many years, due to its calculation cost streamlining capability [18]. In consideration of essential inequality constraint, PPDO algorithm has proposed by utilizing parameter projection to evade KKT conditions that successfully decrease the difficulty and communication cost of calculation by decreasing variables dimensions [19]. Thus, PPDO algorithm has been adopted in joint seaport-AESs system as the core of power dispatching strategy.
In the paper, a parameter projection distributed power dispatching scheme is applied to a joint seaport-AESs system regarding a carbon trading mechanism. The objective is to minimize the total cost of the joint seaport-AESs system, including the fuel cost of distributed generations (DGs) cost, electricity transaction cost and carbon cap-and-trade transaction cost among MGs. Considering inequality constraints associated with power transmission, a PPDO algorithm is utilized, which highly utilizes the computing resource of AESs. The seaport and AESs, acting as independent agents, collaboratively achieve power scheduling by transmitting only necessary information (such as electricity price, power generation, etc.) via peer-to-peer communication. The parameter projection algorithm is fully distributed, extensibility and robust. The main contributions of the paper are as follows:
- (1)
- Considering AESs’ as prosumer, and taking the carbon trading mechanism into account, a joint seaport-AESs power system model is established. The precise mathematical model of power dispatching is established and resolved through fully distributed algorithms.
- (2)
- This paper validates a distributed algorithm based on parameter projection that evades KKT conditions or the Lagrange multiplier operator to slash the difficulty of calculation due to a reduction in variables’ dimensions and applies it to a proposed joint seaport–AES system where AESs’ roles shift to become prosumers.
The remainder of the paper is organized as follows. Section 2 formulates the deterministic power dispatching problems of joint seaport-AESs system with regard to the carbon trading mechanism. Section 3 presents and elaborates an improved parameter projection robust distributed optimization algorithm aimed to settle bounded uncertain disturbance. The convergence property is analyzed. A simulation case is given to verify the feasibility of the proposed model and algorithms are presented in Section 4. The conclusions are finally drawn in Section 5.
2. Problem Formulation
2.1. Polymorphic Joint Seaport-AESs System
Seaport microgrid is a newly proposed concept for seaport management, which is described in ref. [20]. As an independent energy district, the seaport microgrid realizes the sale or purchase of electricity with moored AESs by information communication under polymorphic network, so as to shave peaks and fill valleys to maximize power utilization rate, especially in modernization seaport with heterogeneous new energy. Therefore, the seaport microgrid as a unique territory should renew an operation model with its own power plan, and AESs as well.
A power network and a communication network composes the ship-microgrid of an AES. Generators and batteries, the major components of a ship-microgrid power network, are the basic methods for maintaining vessel operation, especially the communication network, being responsible for information interaction to make power control feasible and effective which reverses acting on power network.
In the peer-to-peer situation, a complete joint seaport-AESs system for the power dispatching problem has been achieved assembled with seaport and moored AESs by polymorphic network. Polymorphic network can isolate networks with different modes and ensure independent performance which solve the security risks and hidden dangers in different dimensions of joint seaport-AESs power system, so as to achieve heterogeneous access of communication network satisfied criss-crossed by AESs.
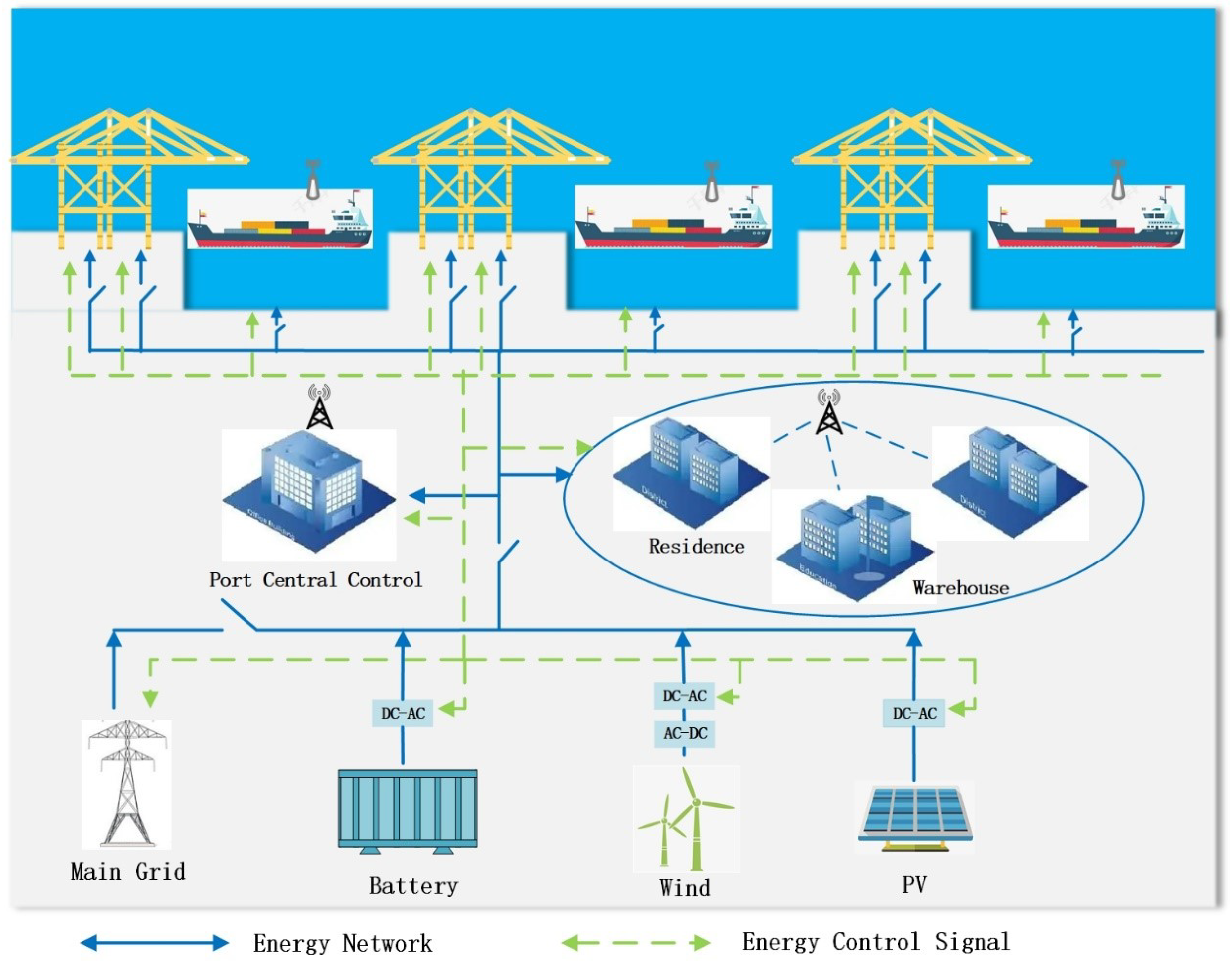
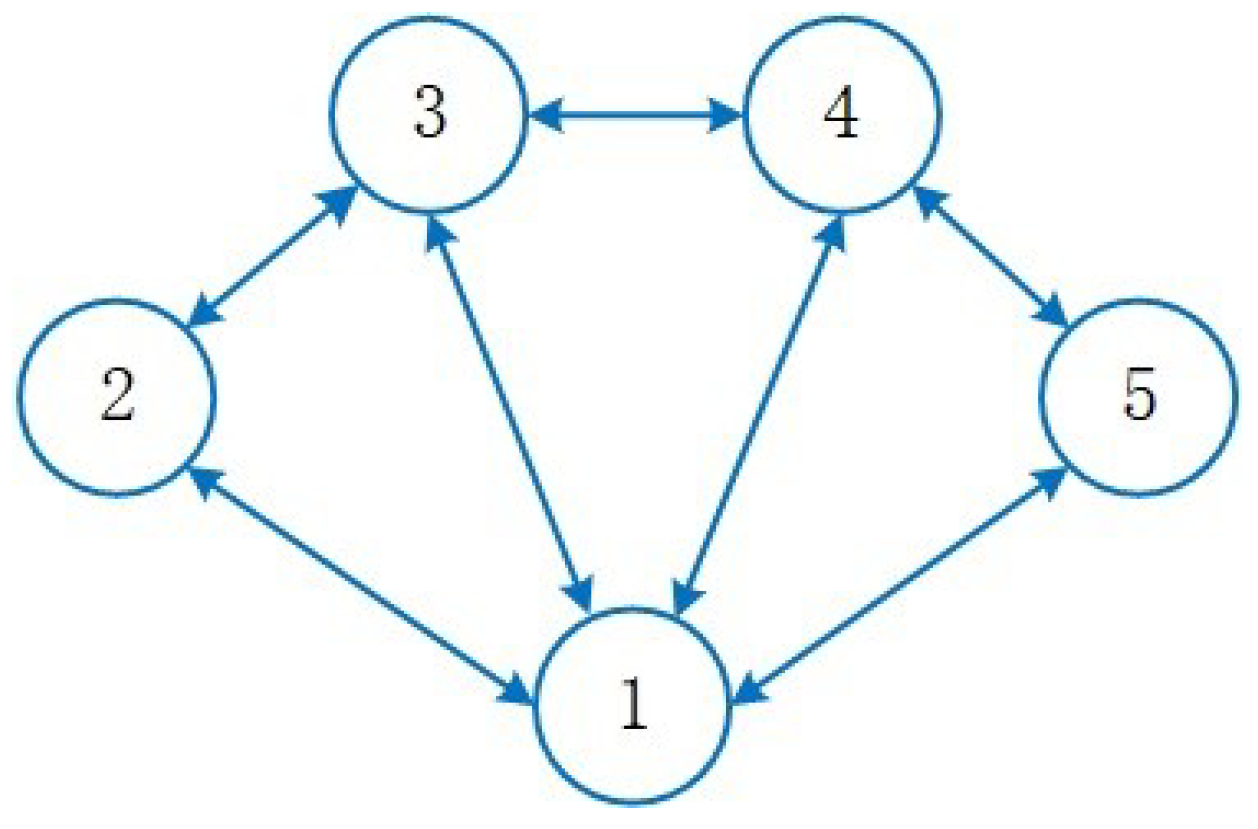
For illustration, the topology of joint seaport-AESs system is shown in Figure 1. For power, the shore power of seaport is connected to the main power grid to make up for power production shortage, and heterogeneous renewable energy sources and AESs are incorporated into the seaport microgrid. For communication networks, the seaport control centers with berth-in AESs collaboration achieve the power integrated optimization by means of exchanging essential information under a polymorphic network. The polymorphic network has adjusted to the scale and significance of the information it processed and acquired by intelligent control. The factors may entirely be causing both inaccessible and inefficient heterogeneous addressing modes in the traditional network, for instance. Furthermore, for green, circular, and low-carbon development, both seaports and AESs refitted with carbon capture infrastructure paved the way for cap-and-trade transaction.
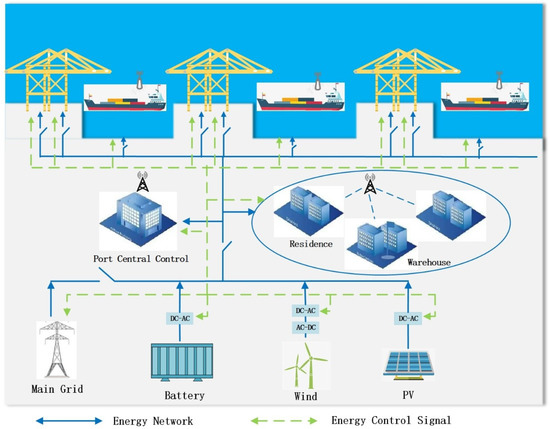
Figure 1.
Joint Port-AESs System.
2.2. Objective Function
Obviously, seaport and AESs microgrids with control centers, sensor detection devices and mechanisms in supply, storage, release of power can be viewed as an agent, having ability both in computation and interactivity. In this study, we consider operations planning of a port with N-1 AESs in T time span. For simplicity, the power generations regardless of type, e.g., tide and solar within MG i is aggregated into a DG. Considering the severity of the global climate problem, the objective function will consider the issue of carbon emissions in the form of carbon trading. Considering a dispatching period , the joint seaport-AESs system operational cost as the optimized target is defined as follows:
where any variable with superscript t denotes its value at time t. The upper optimization formula consists of four portions:
- The diesel cost of DG k in MG i is approximated with a quadratic function as [17]:
- The carbon-trading cost of DG k in MG i:which is adopted in ref. [21] to simplify the analysis, and where is total carbon emission of DG k in MG i, indicates corresponding rated carbon emission share, defined as follow: , where presents the carbon emission intensity.Carbon-trading cost is regarded as an indicator of the expenditure or benefits of the system’s total carbon emissions in the carbon market. Namely, when the system’s carbon emissions quota are greater than its allocations, the excess carbon emissions need to be offset by means of purchasing additional quota; when the system carbon emission is less, the surplus can be sold to the carbon market.
- The cost of MG i for buying power from the neighbor MG j:where is actual power flow from microgrid j to i, and the electricity price of MG i at t time is presented as $/kWh.
- The revenue of MG i for selling power to the neighbor MG j:where is actual power flow to MG j from MG i with $/kWh electricity price of MG i at tth time span.
The joint seaport-AESs system is composed of MGs, denoted as the set . Each MG includes certain DGs such as tidal power generators, the sets of which are denoted as . Denote as the set of MGs i neighbors which are directly connected to MG i with its cardinality being . Furthermore, the incremental cost of each DG is defined as [22]:
2.3. Constraints
- Power balance constraint of the integrated seaportAESs’ multiMG system:For each MG (like the seaport or an AES), the power balance constraint will be decomposed as follows:
- Power and ramp rate limit constraints of DG k in MG i:
- Energy constraints of battery energy storage system (BESS) in MG i (the definition of SOC, the definition of BESS capacity, capacity limit constraint, SOC limit constraint and power limit constraint, in order):
- Constraint of power transaction between grids i and j:
3. Distributed Optimization Solution Methodology
In essence, the proposed model is a constrained optimization problem with convex objective function and mathematical constraints. The PPDO algorithm is applied to solve the integrated power dispatching obstacle of joint seaport-AESs system which has the requirements for decentralization, privacy preservation and scalability considering the practical power mode. The PPDO algorithm evades KKT conditions or the Lagrange multiplier operator to decrease the difficulty of calculation with the reduction of variables’ dimensions. Moreover, the PPDO algorithm can reach consensus in finite time which the convergence speed is proposed in [19].
3.1. Graph Theory
In this section, certain basal concepts and lemmas used in the paper from algebraic graph theory are introduced.
Considering seaport-AESs interconnection system with one seaport and N-1 AESs, an undirected graph G with N nodes is used to indicate the communication topology of the system and the way that bilateral communication is based on the practical physical structure of polymorphic network. G denotes a weighted undirected graph which is defined as , where is the set of nodes representing agents, represents the set of undirected edges, and with non-negative elements denotes the underlying weighted adjacency matrix. Taking bilateral information communication into account, weighted undirected graphs are apposite to be positive which indicates in between nodes and node in G if and only if ; otherwise, . Moreover, if and only if for each pair of nodes and node in G where , the undirected graph is connected, namely, a bidirectional path from nodes to node is set up.
3.2. Parameter Projection
Parameter projection is introduced in distributed algorithm to tackle inequality constraints on joint port-AESs system optimization. The algorithm refrains from the Lagrange multiplier technique or KKT conditions. Hence, the difficulty of calculation is slashed with the reduction of variables dimensions, realize the demand of decentralization, which is a fully distributed algorithm.
The standard projection operator which is utilized in subsequent section will be introduced as follow [19]:
where is a convex set, represents the boundary of the convex set , and stands for the interior of . Meanwhile, the function F: is required to be smooth and convex. is inside of convex set , representing as , then the gradient of F at are denoted by , as well as the outer normal vector. is a positive-definite symmetric matrix.
Taking the first-order Taylor expansion at of function F,
is small enough. For the first case, if , the point stays in ; and for the second case, if , is a decent direction which makes not exceed . Therefore, is no increase for function F.
3.3. Parameter Projection Distributed Optimization (PPDO)
Consider the seaport-AESs interconnection system comprising N agents, consisting of one seaport and N-1 AESs, and the following demonstrates continuous dynamics of each node:
where is the state of agent i, is control input which will design later.
Each agent updates its values by running the following protocol:
Proposition: The objective Function (1) and all constraints (6)–(15), presented as and respectively, are convex and are known by agent i itself. Under connected undirected topology, the power dispatching strategy of the proposed joint seaport-AESs system can be solved via PPDO algorithm.
The and the are defined as follows:
where , and denote and , respectively. When satisfying the descending local objective value or out of constraints range, the direction of state remains the initial direction both in objective functions and inequality constraint functions ; otherwise, change to the normal direction or zero, correspondingly.
The objective function of agent i is:
with .
According to the constrains, listed in (6)–(15), of joint seaport-AESs system, the constraint is a vector function with 12 elements. Taking constraint (7) as example, the result is as follows:
Therefore, and .
Therefore, a transfer function is needed, which transfers the vector to a scalar function. To ensure invariant symbols for the constraints as well as convergence rate, the auxiliary functions are constructed as follows:
Then, we can obtain
Then, all the agents can achieve consensus, and converge to the optimum of cost function (12) within constraints sets in finite time.
4. Numerical Results
This section, the joint seaport-AESs system composed of a seaport and four AESs have predetermined show promise of power dispatching scheme in 24 h solved by proposed robust distributed optimization based on parameter projection methods. The proposed joint seaport-AESs system is modelled on a computer with Intel Core i7 3.4 GHz CPU by using MATLAB 2020A.
4.1. Text System
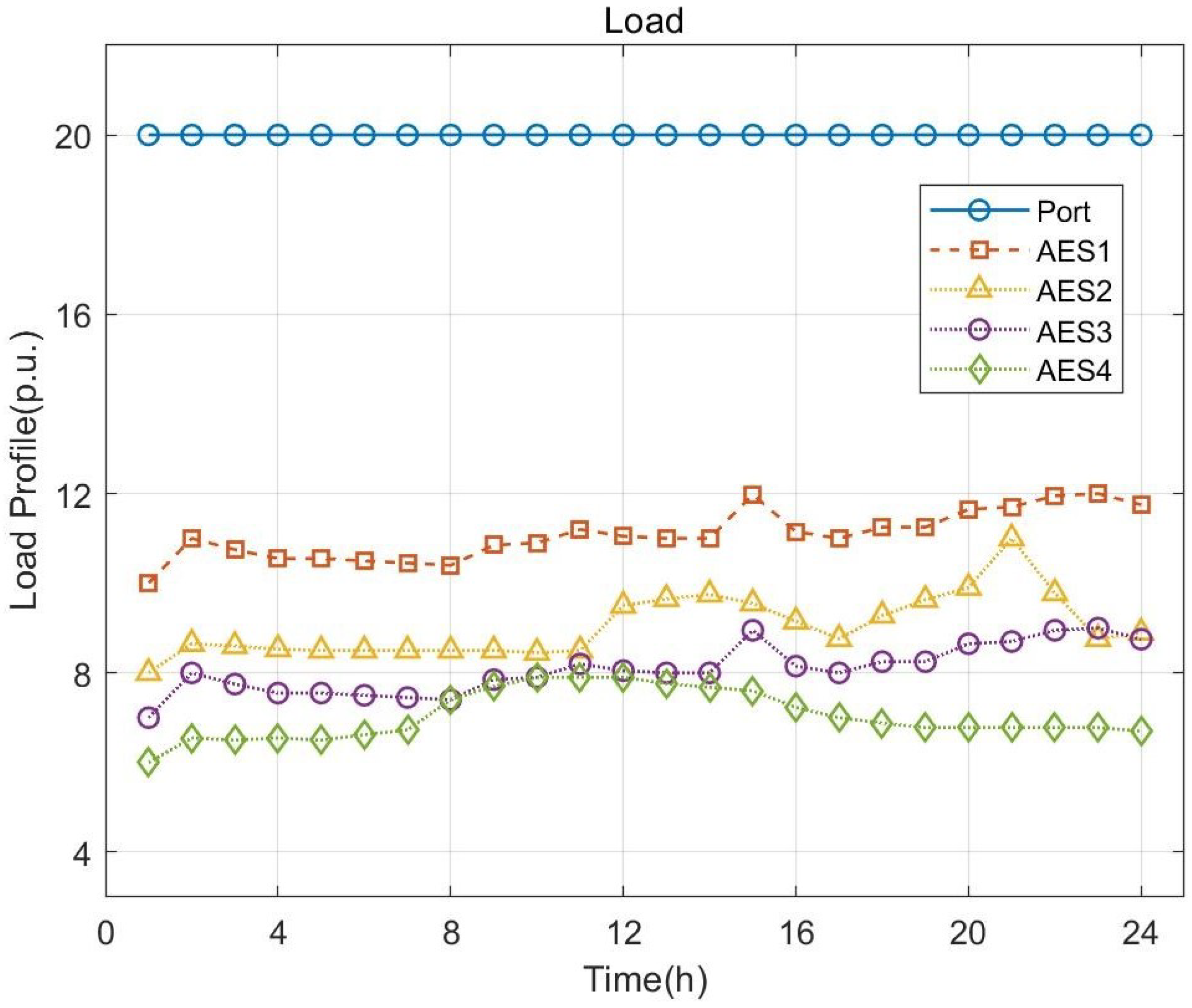
For simplicity, we predetermine that one dispatchable DG and one BESS has been equipped within each MG. The relevant data of each generation are given in Table 1 and the topology of the system networks is assumed in Figure 2. This research, the local demand in each MG at each span in 24 h are given in Figure 3. The predetermined optimization time horizon is chosen to be 24 h and time step is 1 h.

Table 1.
Paremeter of DGs.
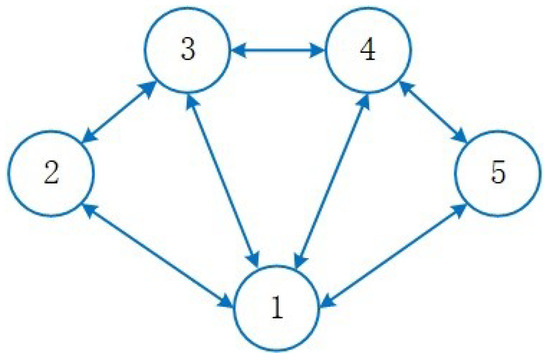
Figure 2.
Topology of the joint seaport-AESs system.
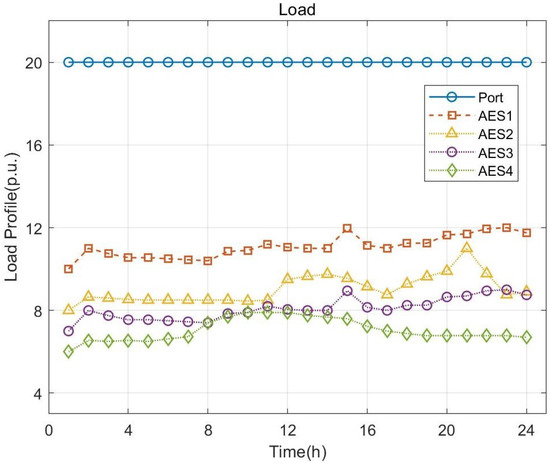
Figure 3.
Demand of Port and AESs.
4.2. Simulation Results
To verify the feasibility of the PPDO approach, several cases are hypothesized in this section. Case 1 shows the feasibility and performance of the test system under time-varying electricity price conditions with large supply from the port in the preceding 12 time spans. Case 2 demonstrates the capability of the PPDO approach when the demand for power outstrips supply from time spans 13 to 18. Case 3 shows the emergency-tolerant adaptability and the capability of adaptation to deprivation of the test system from 19 to the end. The joint seaport-AESs system, shown in Figure 2, contains a port and 4 AESs which has a DG, an arbitrary network access morph, respectively, and the communication topology decided by the practice physical framework showing in Figure 1.
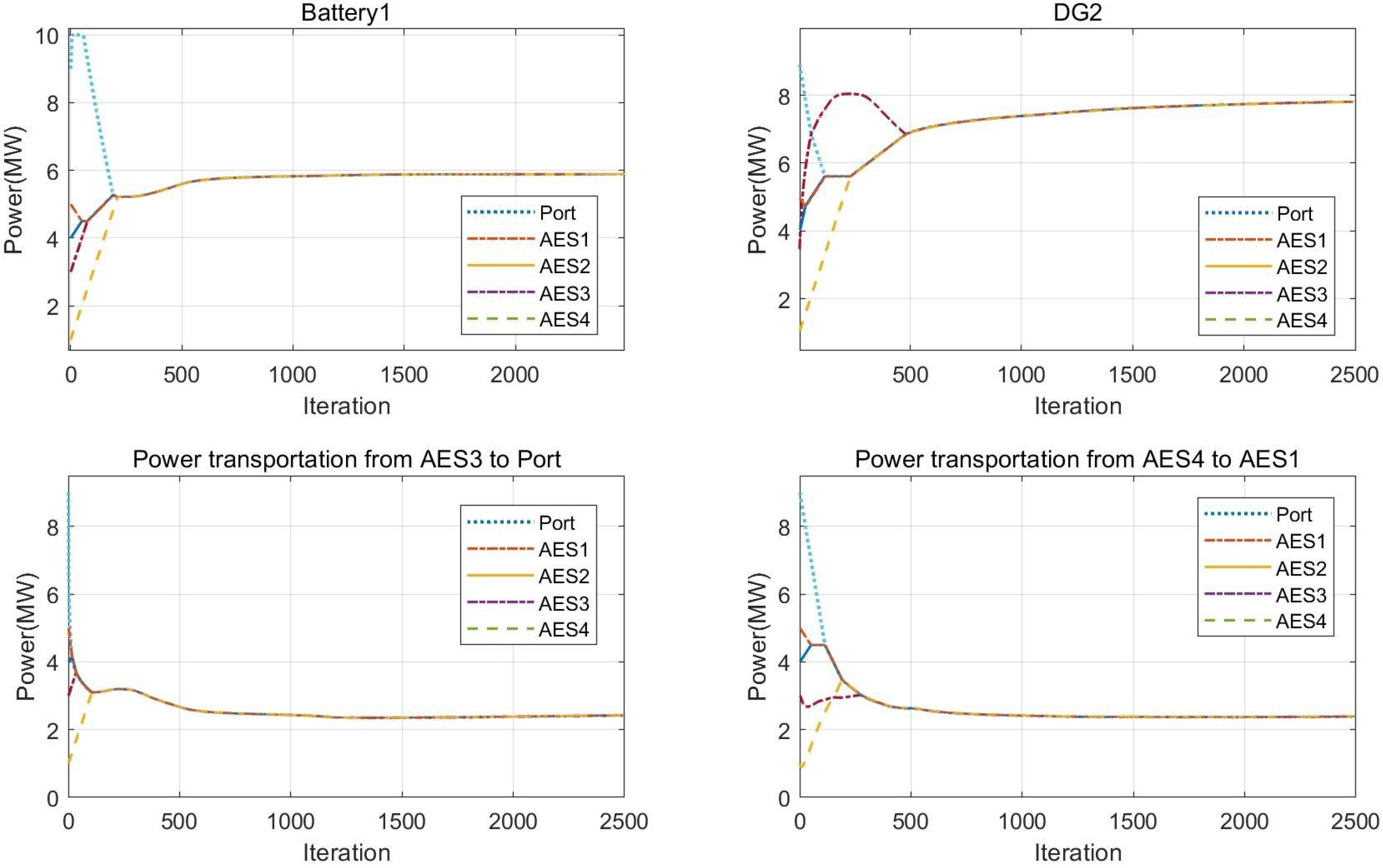
In this test system, the total demand fluctuates around 54.76 (p. u.) with loads of port maintaining 20 (p. u.) and 11, 9, 8, 7 (p. u.) for AESs respectively. The schedule time horizon is 24 h, and for the sake of conveniently elaborating the feasibility of the parameter projection distributed optimization algorithm, we choose the 17th time span as example, meanwhile , , and are chosen by chance to demonstrate the convergence of the distributed optimization. From the results shown in Figure 4, it can be seen that , , and achieve consensus and converge to a common value. The convergence of the PPDO algorithm has been verified. Furthermore, the final estimated generated and transported power , , and is constrained in its corresponding lower and upper bound. Indicating power of port’s battery, satisfies relevant constraints (11), (13) and (14) in detail. indicates power generation of AES2 which is subject to its corresponding constraints (8) and (9). and show the energy dispatching between AES and Port and among AESs respectively. They are subjected to constraint (15). Above four variables are confined by constraint (7) as well. The feasibility of PPDO algorithm has been verified though above simulation result. The rest time and generation and transportation power in the 17th h similarly converge.
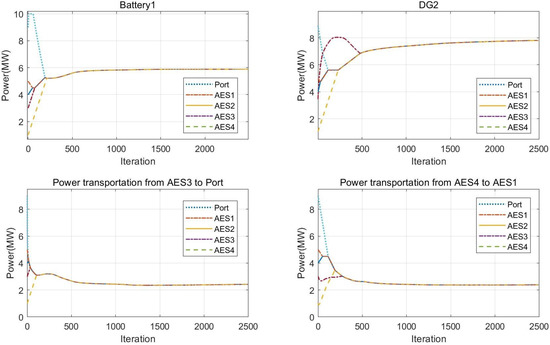
Figure 4.
Convergence at 17th time span.
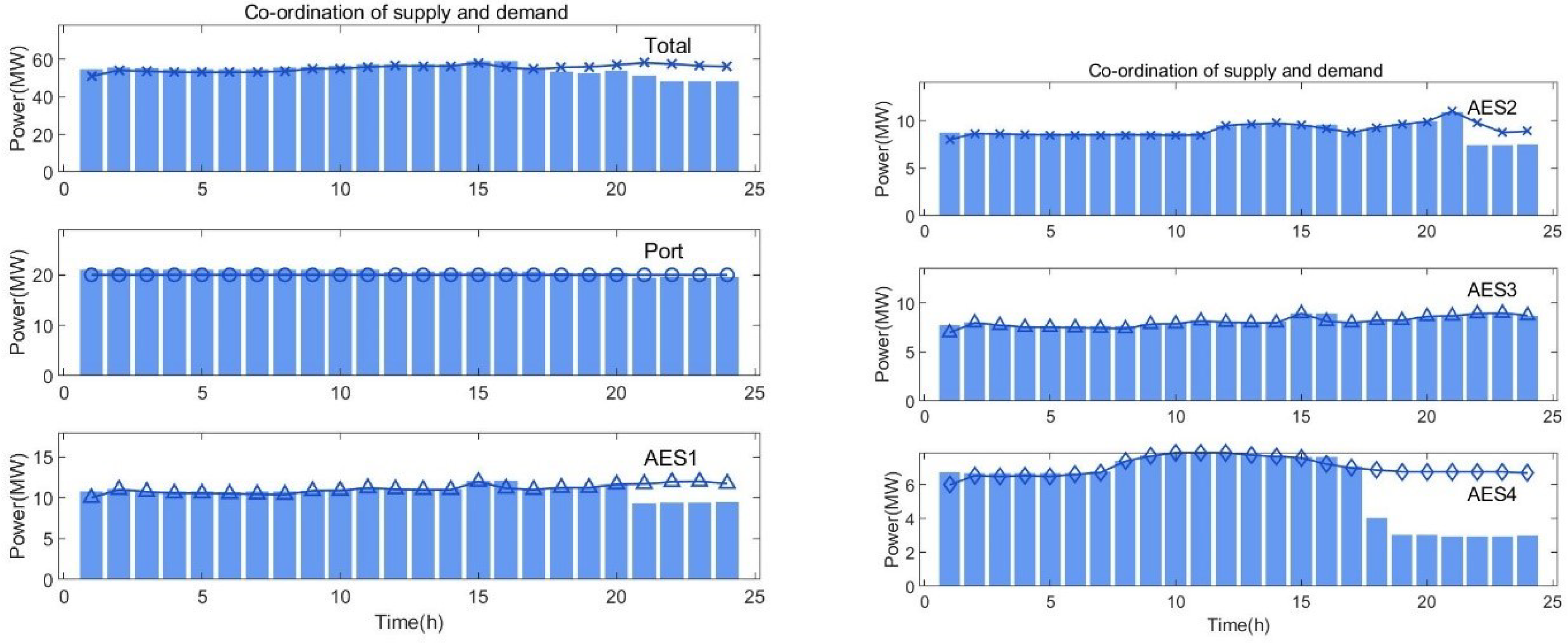
Figure 5 denotes co-ordination of supply-demand of whole joint seaport-AESs test system as well as each microgrid within 24 h. The demand of the system and each microgrid are depicted in the line diagram in Figure 2, where the practical supply is depicted as the bars. The top of the first picture shows that the co-ordination of supply and demand are satisfied in Case 1 and Case 2 which agrees with the constraint (6) and constraint (7). The total production overrides the load of the whole joint port-AES test system.
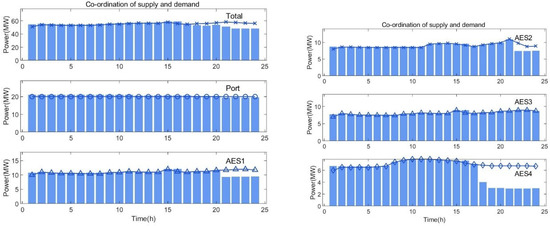
Figure 5.
Co-ordination of supply and demand.
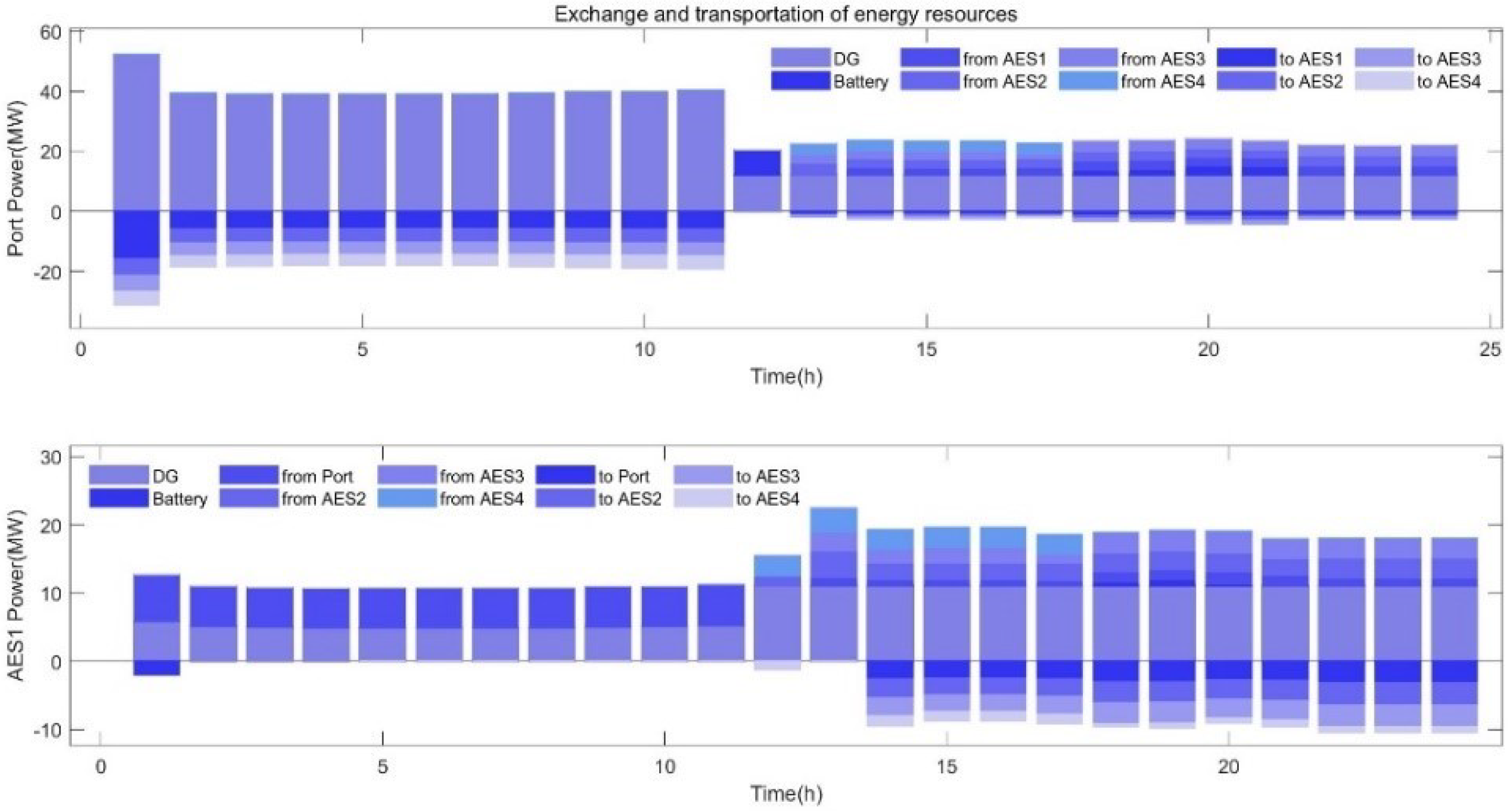
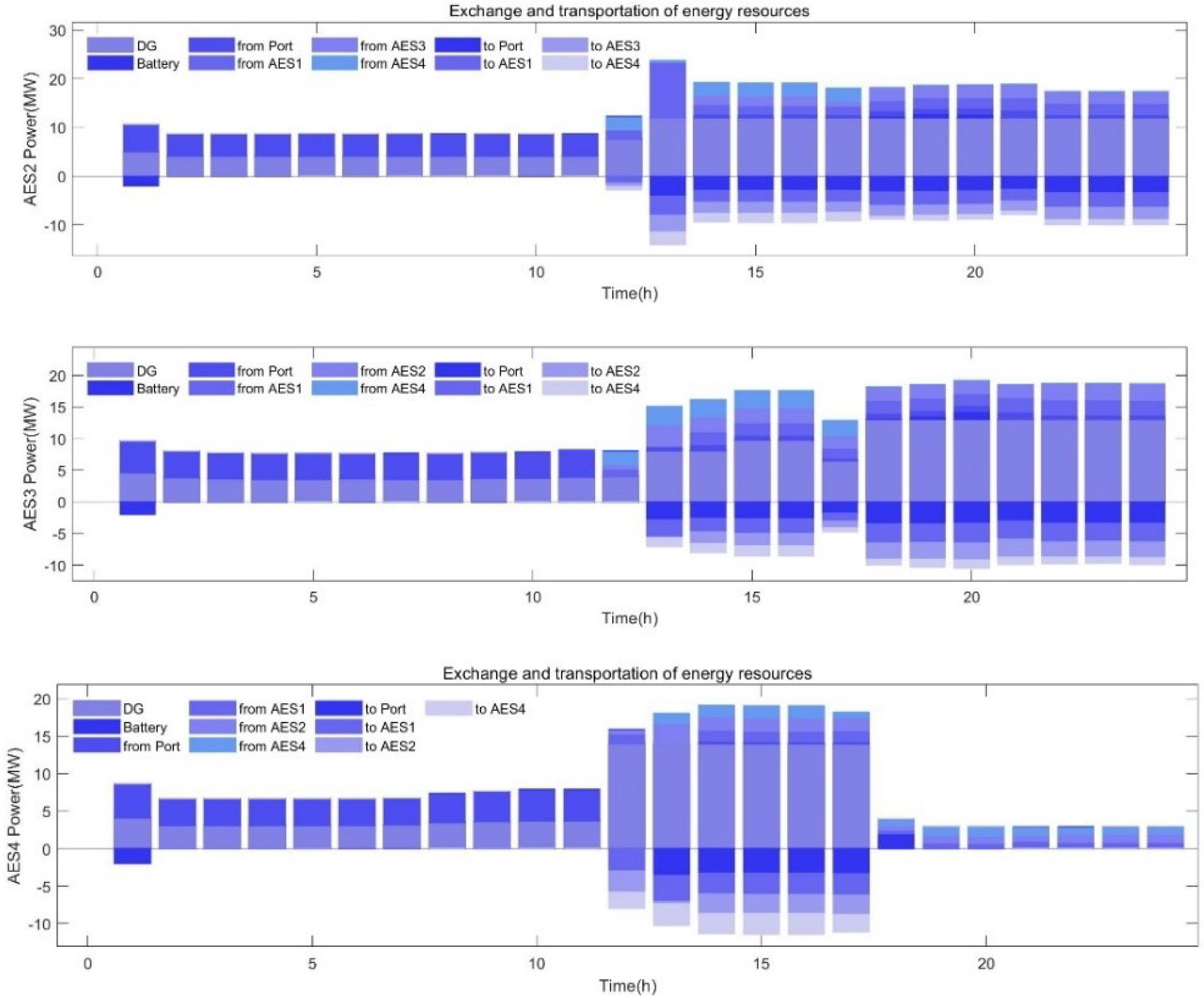
From 18 h, the supply and demand are out of balance as a result of power shortages, corresponding with the hypothesis in Case 3-an AES4’s generator has damaged. Concurrently, prepared BESSs work to maintain co-ordination of supply and demand which can be observed in Figure 6 and Figure 7. However, further down the timeline, BESSs’ power stores are depleted due to limited reserves confined by the constraint (13), and the imbalance is on the rise. Thus, the mismatch showing after 18th hours conforms to the hypothetical situation. The port and AES1-4 show the same tendency.
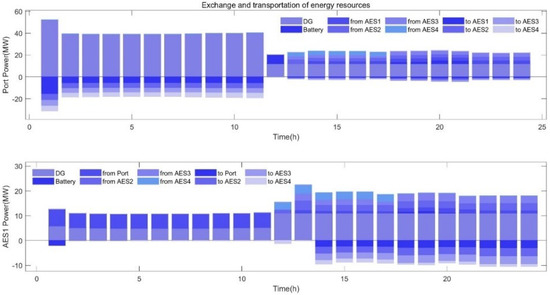
Figure 6.
Power flow and composition of the Port and AES1.
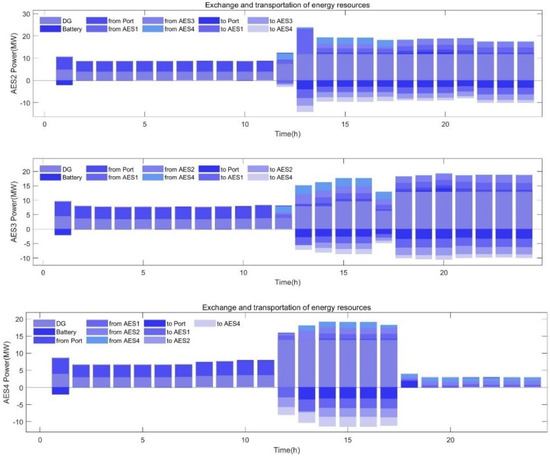
Figure 7.
Power flow and composition of AES2-4.
The first time span of Figure 5 varies slightly with other dispatching spans. The practical supply is universally low and the demand is reasonable. Thus, that power is used to charge the BESSs. It indicates the effect of constraint (6) and (7). Consequently, this study shows that the PPDO can effectively adapt to emergency-tolerant features of the joint port-AESs test system.
In Figure 6 and Figure 7, we can see more details about the flow and composition of power. The y-axis represents the amount of power and the x-axis represents hours of the day. The bi-directional power flow from/to port/AES1-4 allows the efficient management of power dispatch and trade. Figure 6 shows the stacked, explicit power flow and composition of the generation dispatch for the joint seaport-AESs system. The central portion of the bar indicates the active power of DGs in seaport or AESs, which are clearly the main force of power supply. Obviously, stacked figures, Figure 6 and Figure 7, match the three cases within all constraints (6)–(15). Price-dependent power dispatching is described as follows. From the 1st time span to the 12th h, the DG of the port, as the major producer, even charged five batteries due to low electrovalence, which leads to power transmission only from the port, but things changed drastically after the DG port supply blockage in 13th h. DGs of AES1-4 power up, becoming the majority of the power supply confined by the co-ordination of supply and demand-constraint (6) and (7). When the DG of AES4 shutdown, it saw an increased role for low electrovalence supplier, such as AES3 and batteries, exacerbating power transmission and battery discharge. Generally speaking, the results obtained by PPDO is completely in conformity with hypothetical cases, which verifies the effectiveness of the proposed approach.
5. Conclusions
The joint seaport-AESs interconnection system with clean energy and carbon trading center, based on a polymorphic network, has been established according to a practical shore power system and carbon trade mechanism, and the boundary conditions are given also. An advanced peer-to-peer power dispatching mode has been proposed. In order to ensure the cost minimization and precision of the power dispatching of the joint seaport-AESs interconnection system, this paper applied a distributed approach with parameter projection, namely PPDO algorithm, to optimize the operations planning and dispatching via polymorphic network to exchanging and processing local information according to consensus-based protocols. The PPDO strategy has been implemented to efficiently coordinate all MGs in a fully distributed manner, and effectively eased the communication and calculation. The effectiveness and feasibility of the strategy against the demand outstrip and emergency-tolerant MMG network have been verified by simulating a five-node joint seaport-AESs interconnection test system via the convergence of all the agents within the constraint sets. In further work, we will focus on an extension of robust distributed optimization of seaport-AESs interconnection system proposed to accommodate general uncertain disturbances, such as colored noise.
Author Contributions
Conceptualization, W.X., Q.S., G.X., Y.T. and Y.L.; methodology, W.X. and Q.S.; software, W.X.; validation, W.X. and Q.S.; formal analysis, W.X., Q.S. and G.X.; resources, W.X., Q.S. and G.X.; data curation, G.X., Y.T. and Y.L.; writing—original draft preparation, W.X.; writing—review and editing, W.X. and Q.S.; supervision, Q.S., G.X., Y.T. and Y.L.; project administration, Q.S., G.X., Y.T. and Y.L.; funding acquisition, Q.S., G.X., Y.T. and Y.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research is supported by the National Key R&D Program of China (2019YFB1802501) and Key Research Project of Zhejiang Lab (2021LE0AC02); High Level Talents Innovation Support Plan of Dalian (Young Science and Technology Star Project) (under Grant No. 2021RQ058); National Natural Science Foundation of China (under Grant Nos. 51939001, 61976033, 61751202, 61903092, U1813203); the Science and Technology Innovation Funds of Dalian (under Grant No. 2018J11CY022); the Liaoning Revitalization Talents Program (under Grant Nos. XLYC1908018, XLYC1807046).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in the study are included in the article material, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Fourth Greenhouse Gas Study 2020. Available online: https://www.imo.org/en/OurWork/Environment/Pages/Fourth-IMO-Greenhouse-Gas-Study-2020.aspx (accessed on 9 July 2022).
- Gennitsaris, S.G.; Kanellos, F.D. Emission-Aware and Cost-Effective Distributed Demand Response System for Extensively Electrified Large Ports. IEEE Trans. Power Syst. 2020, 34, 4341–4351. [Google Scholar] [CrossRef]
- Kanellos, F.D.; Volanis, E.M.; Hatziargyriou, N.D. Power Management Method for Large Ports with Multi-Agent Systems. IEEE Trans. Veh. Technol. 2019, 10, 1259–1268. [Google Scholar] [CrossRef]
- Iris, Ç.; Siu, J.; Lam, L. Optimal energy management and operations planning in seaports with smart grid while harnessing renewable energy under uncertainty. Omega Int. J. Manag. Sci. 2021, 103, 102445. [Google Scholar] [CrossRef]
- Fang, S.; Xu, Y.; Li, Z.; Zhao, T.; Wang, H. Two-Step Multi-Objective Management of Hybrid Energy Storage System in All-Electric Ship Microgrids. IEEE Trans. Veh. Technol. 2019, 68, 3361–3373. [Google Scholar] [CrossRef]
- Huang, B.; Li, Y.; Zhan, F.; Sun, Q.; Zhang, H. A Distributed Robust Economic Dispatch Strategy for Integrated Energy System Considering Cyber-Attacks. IEEE Trans. Ind. Inform. 2022, 18, 880–890. [Google Scholar] [CrossRef]
- Li, Y.; Gao, D.W.; Gao, W.; Zhang, H.; Zhou, J. Double-Mode Energy Management for Multi-Energy System via Distributed Dynamic Event-Triggered Newton-Raphson Algorithm. IEEE Trans. Smart Grid 2020, 11, 5339–5356. [Google Scholar] [CrossRef]
- Li, Y.; Gao, W.; Huang, S.; Wang, R.; Yan, W.H.; Gevorgian, V.; Gao, W.D. Data-driven Optimal Control Strategy for Virtual Synchronous Generator via Deep Reinforcement Learning Approach. J. Mod. Power Syst. Clean Energy 2021, 9, 919–929. [Google Scholar] [CrossRef]
- Li, X.; Xie, L.; Hong, Y. Distributed Continuous-Time Nonsmooth Convex Optimization With Coupled Inequality Constraints. IEEE Trans. Control Netw. Syst. 2020, 7, 74–84. [Google Scholar] [CrossRef]
- Notarnicola, I.; Notarstefano, G. Constraint-Coupled Distributed Optimization: A Relaxation and Duality Approach. IEEE Trans. Control. Netw. Syst. 2020, 7, 483–492. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, P.; Cortés, J. Network Optimization via Smooth Exact Penalty Functions Enabled by Distributed Gradient Computation. IIEEE Trans. Control Netw. Syst. 2021, 8, 1430–1441. [Google Scholar] [CrossRef]
- Ma, L.; Bian, W. A Novel Multiagent Neurodynamic Approach to Constrained Distributed Convex Optimization. IEEE Trans. Cybern. 2021, 51, 1322–1333. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Huang, K. Innovate the network development paradigm and build a polymorphic networks environment —“Key Technologies of Polymorphic Network Environment”. J. Commum. 2022, 4, 1–2. [Google Scholar]
- Wu, J.; Hu, X. The development paradigm of separation between network technical system and supporting environment. Inf. Commun. Technol. Policies 2021, 8, 1–11. [Google Scholar]
- Zhang, R.; Xiao, G.; Shan, Q.; Zhou, T.; Li, D.; Teng, F. Communication topology reconstruction method for multi-agent cooperative control in polymorphic networks. J. Commum. 2022, 4, 50–59. [Google Scholar]
- Yang, T.; George, J.; Qin, J.; Yi, X.; Wu, J. Distributed least squares solver for network linear equations. Automatica 2020, 113, 108798. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Yu, J.; Deng, X.; Wan, S. FedCPF: An Efficient-Communication Federated Learning Approach for Vehicular Edge Computing in 6G Communication Networks. IEEE Trans. Intell. Transp. 2022, 23, 1616–1629. [Google Scholar] [CrossRef]
- Fang, S.; Wang, Y.; Gou, B.; Xu, Y. Event-Triggered Control of Nonlinear Discrete-Time System with Unknown Dynamics Based on HDP. IEEE Trans. Cybern. 2022, 52, 6046–6058. [Google Scholar]
- Tian, F.; Yu, W.; Fu, J.; Gu, W.; Gu, J. Distributed Optimization of Multiagent Systems Subject to Inequality Constraints. IEEE Trans. Cybern. 2021, 51, 2232–2241. [Google Scholar] [CrossRef]
- Nutkani, I.U.; Loh, P.C.; Wang, P.; Blaabjerg, F. Decentralized Economic Dispatch Scheme with Online Power Reserve for Microgrids. IEEE Trans. Smart Grid 2017, 8, 139–148. [Google Scholar] [CrossRef]
- Chen, H.; Chen, J.; Zhang, Z.; Wang, C.; Wang, J.; Han, H.; Lv, J. Low-carbon economic dispatching of power system considering capture energy consumption of carbon capture power plants with flexible operation mode. Electr. Power Autom. Equip. 2021, 9, 133–139. [Google Scholar]
- Huang, B.; Li, Y.; Zhang, H.; Sun, Q. Distributed optimal co-multi-microgrids energy management for energy internet. IEEE/CAA JAS 2016, 3, 357–364. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).