



An Improved Innovation Adaptive Kalman Filter for Integrated INS/GPS Navigation


Abstract
:1. Introduction
2. Kalman Filter and Its Parameter Analysis
3. Methodology of Proposed Improved Innovation Adaptive Kalman Filter
3.1. Constructing a Chi-Squared Test Using the Innovation Series
3.2. Improved Innovation-Based Measurement Noise Update Method
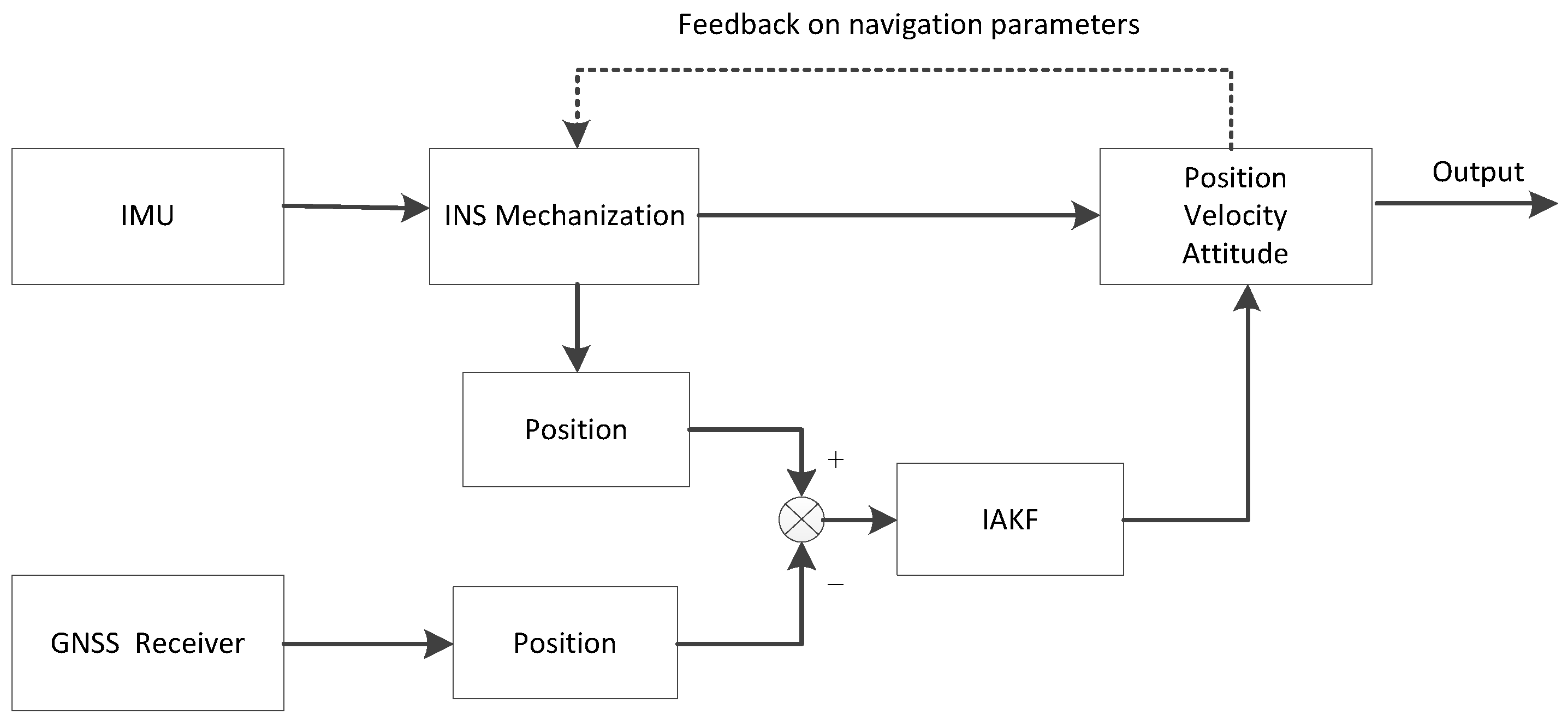
3.3. Mathematical Model of INS/GNSS Integrated Navigation
4. Experiment
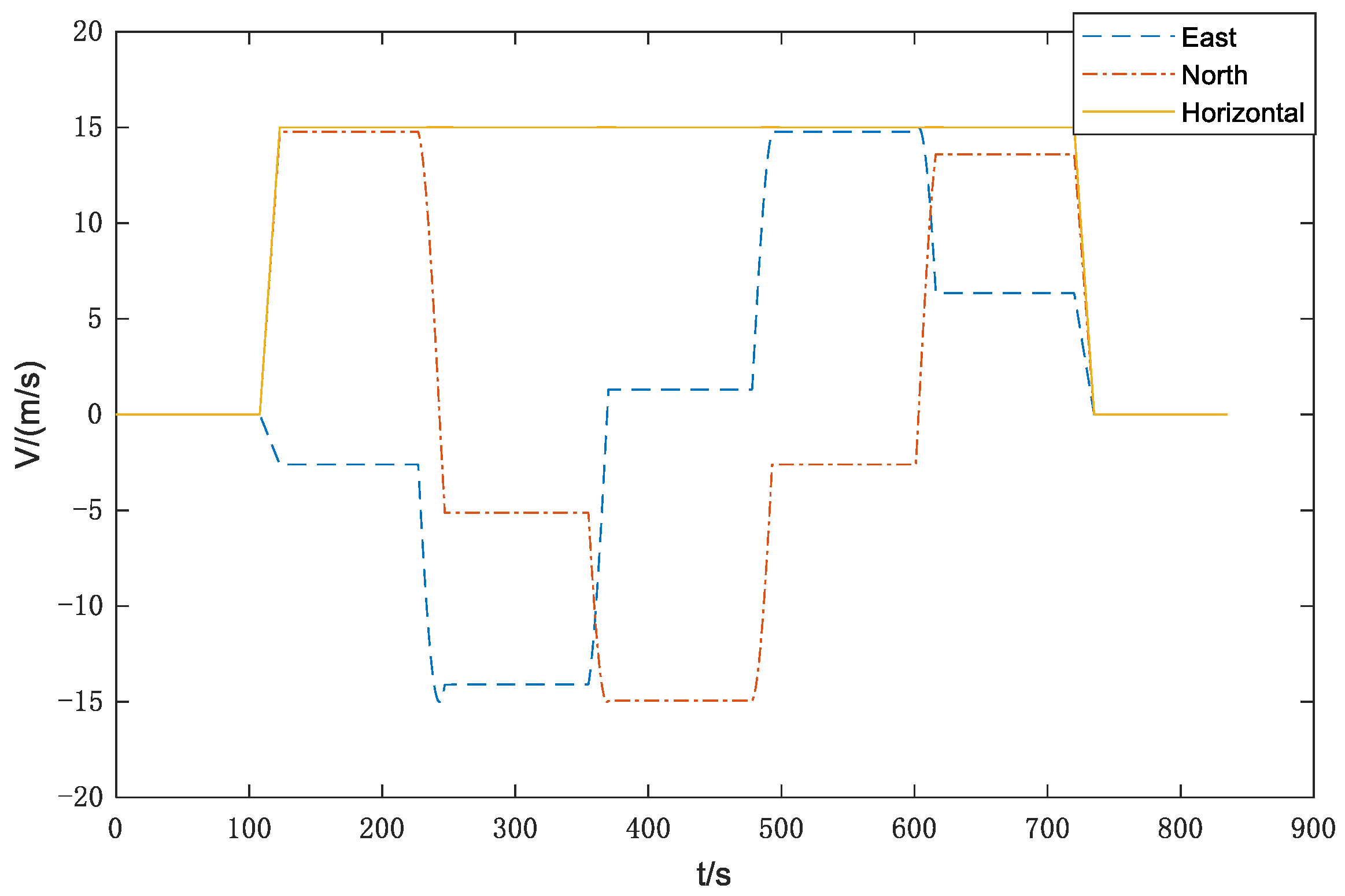
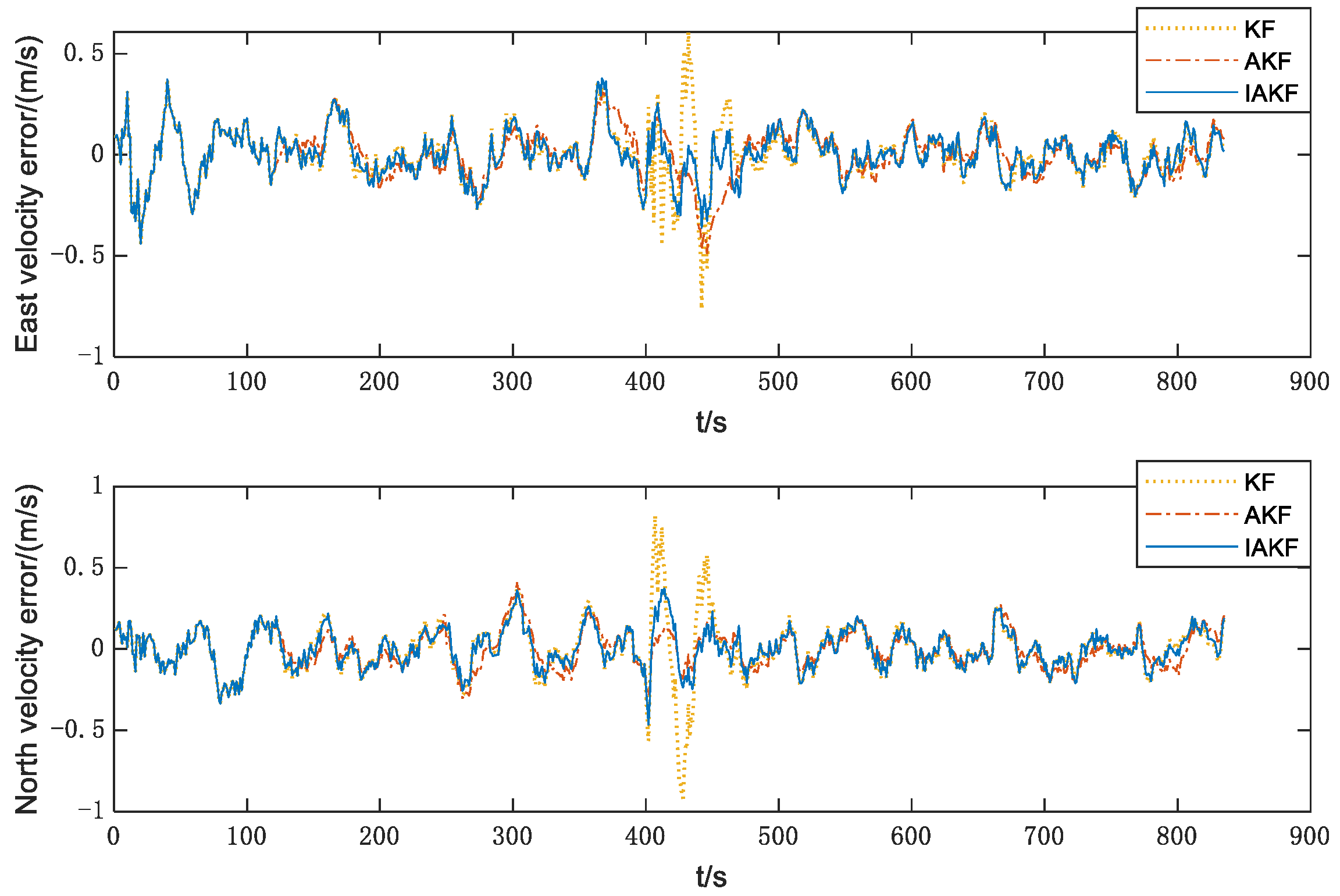
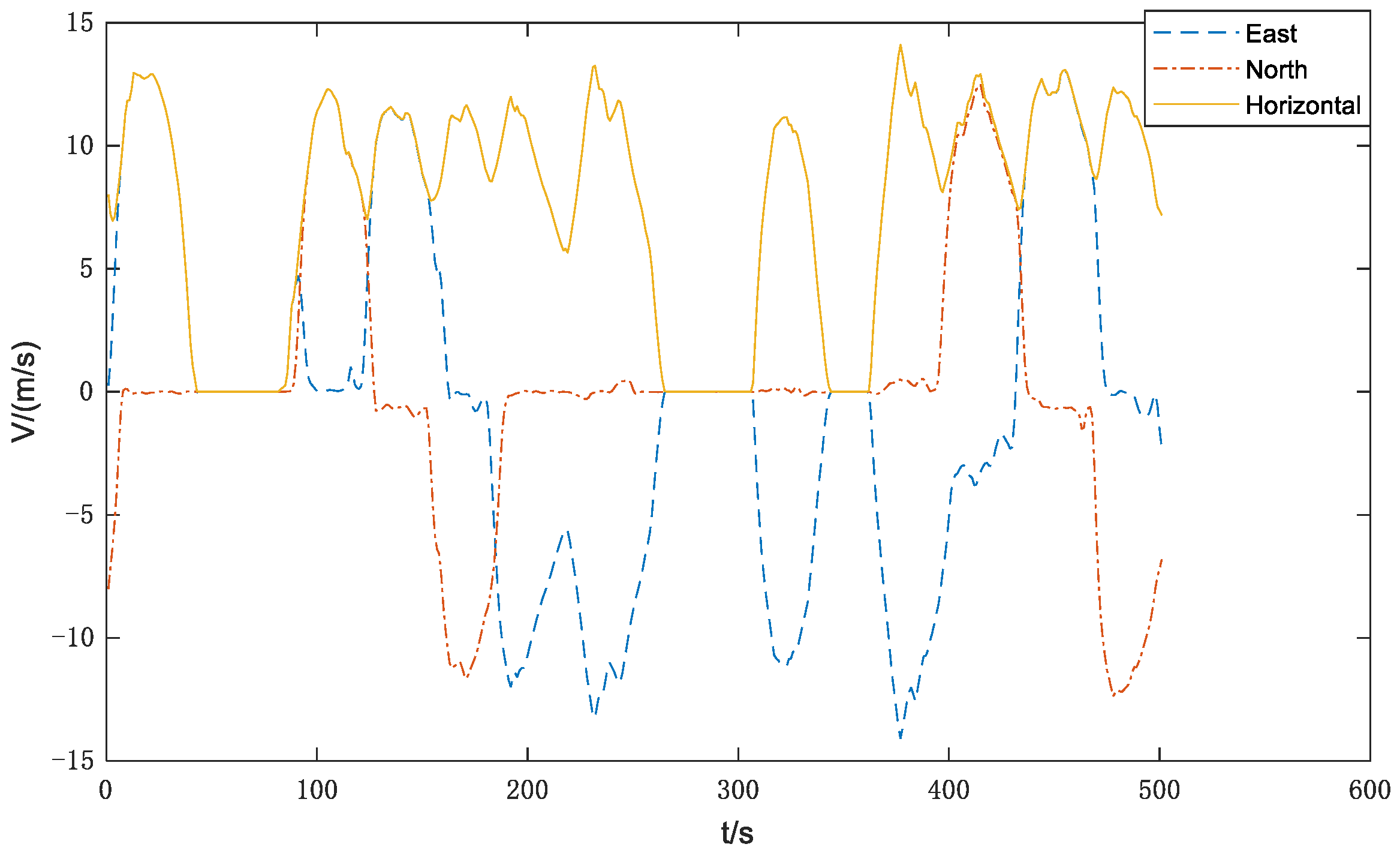
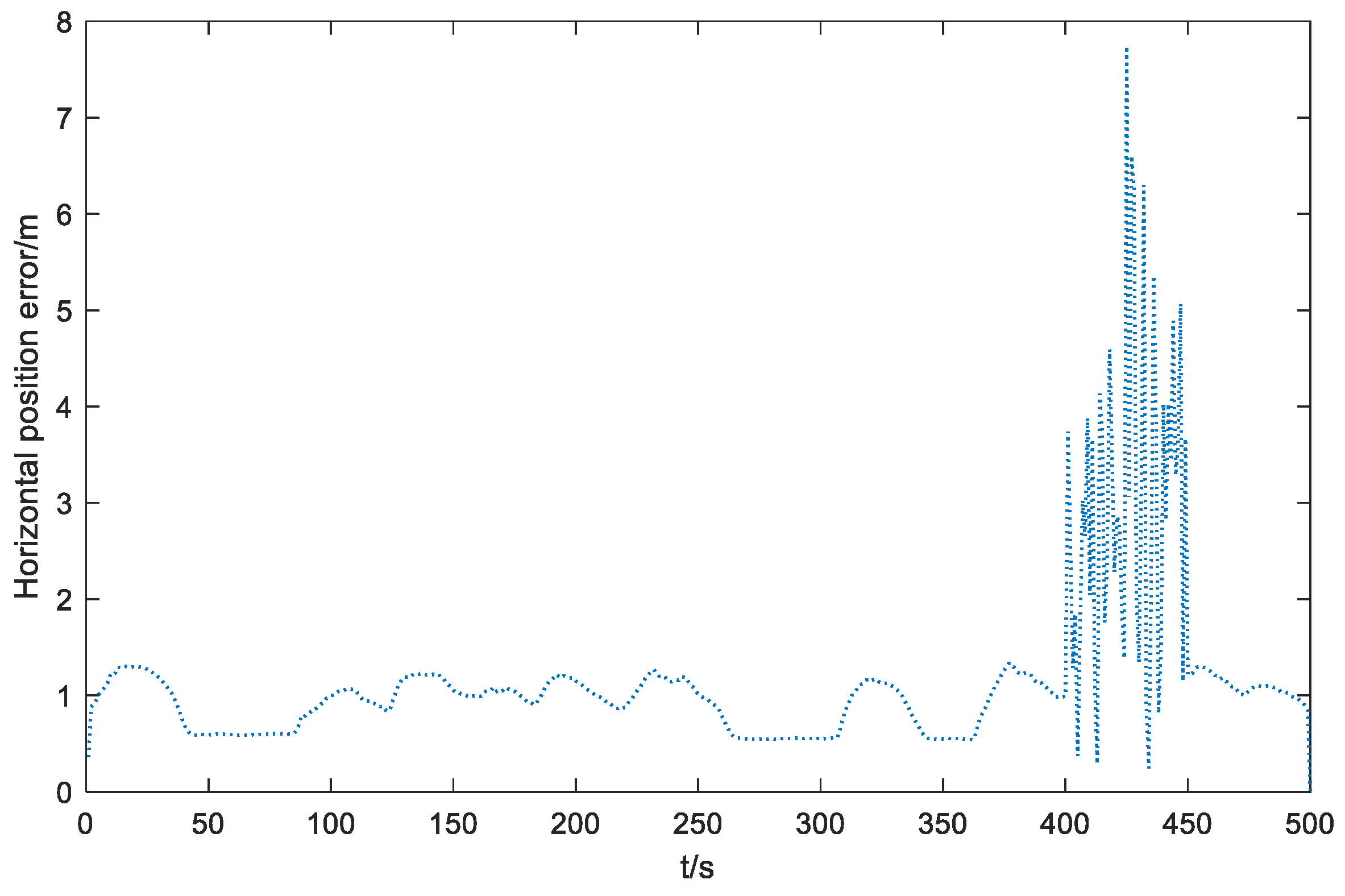
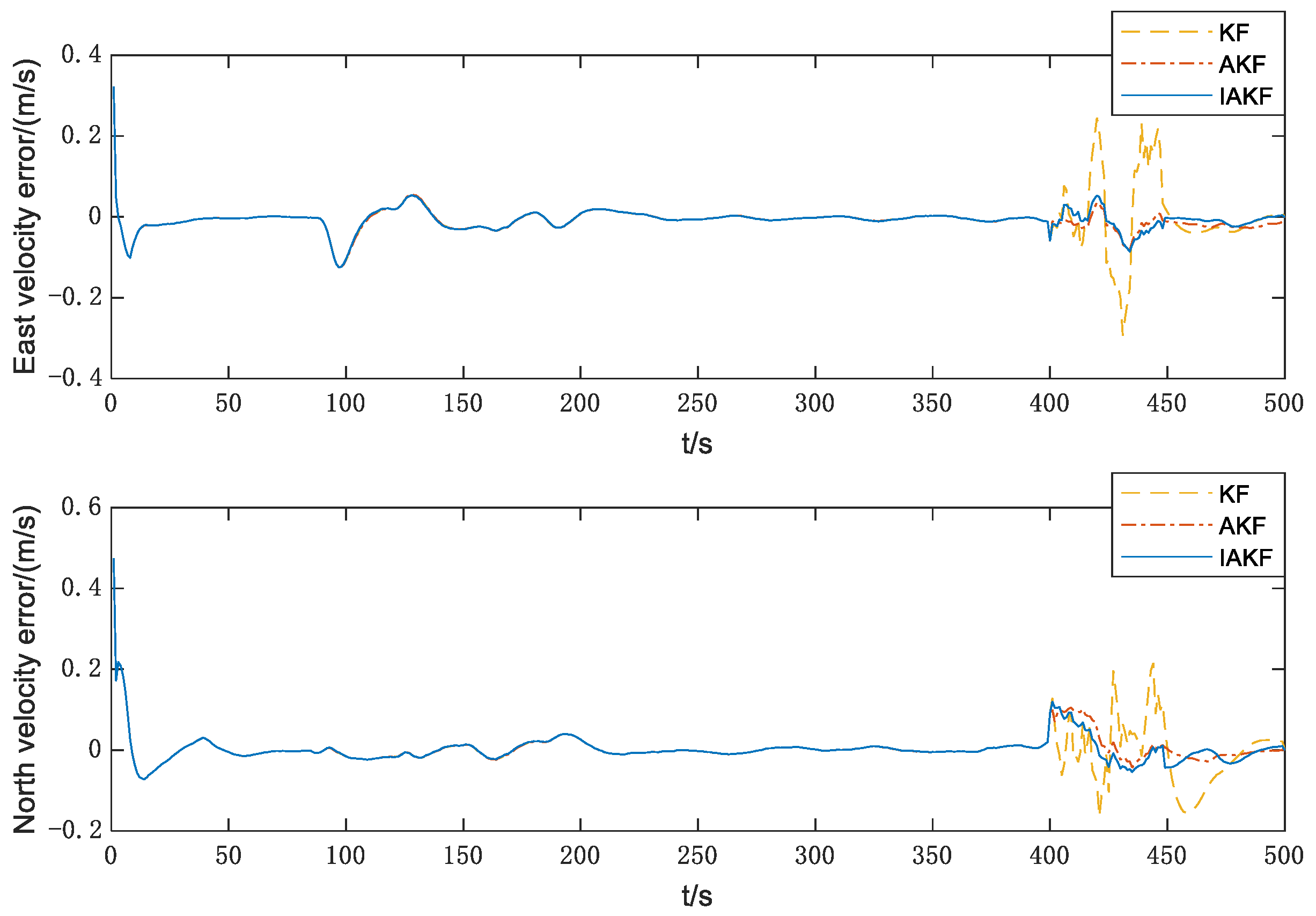
4.1. Simulation Experiment
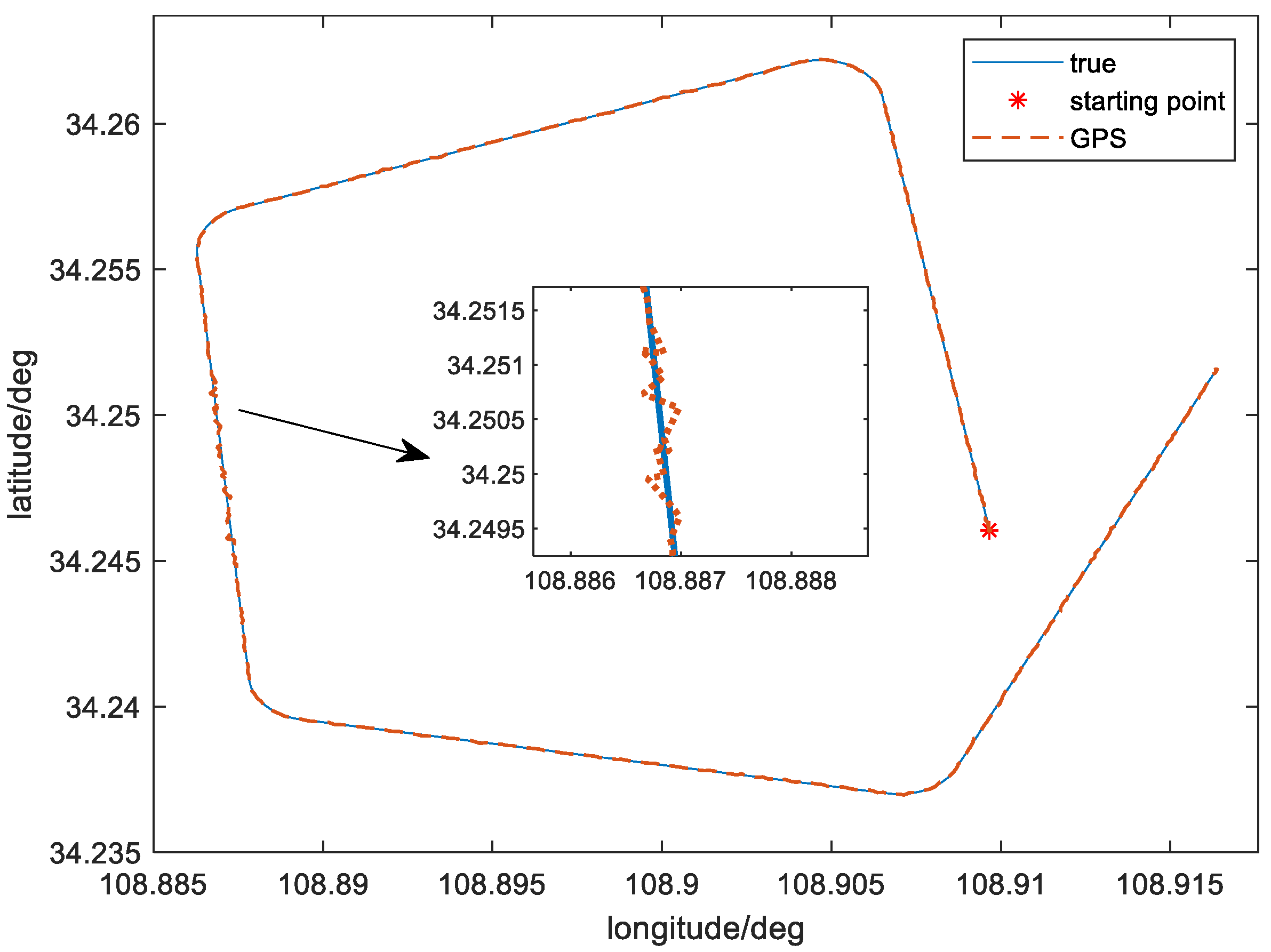
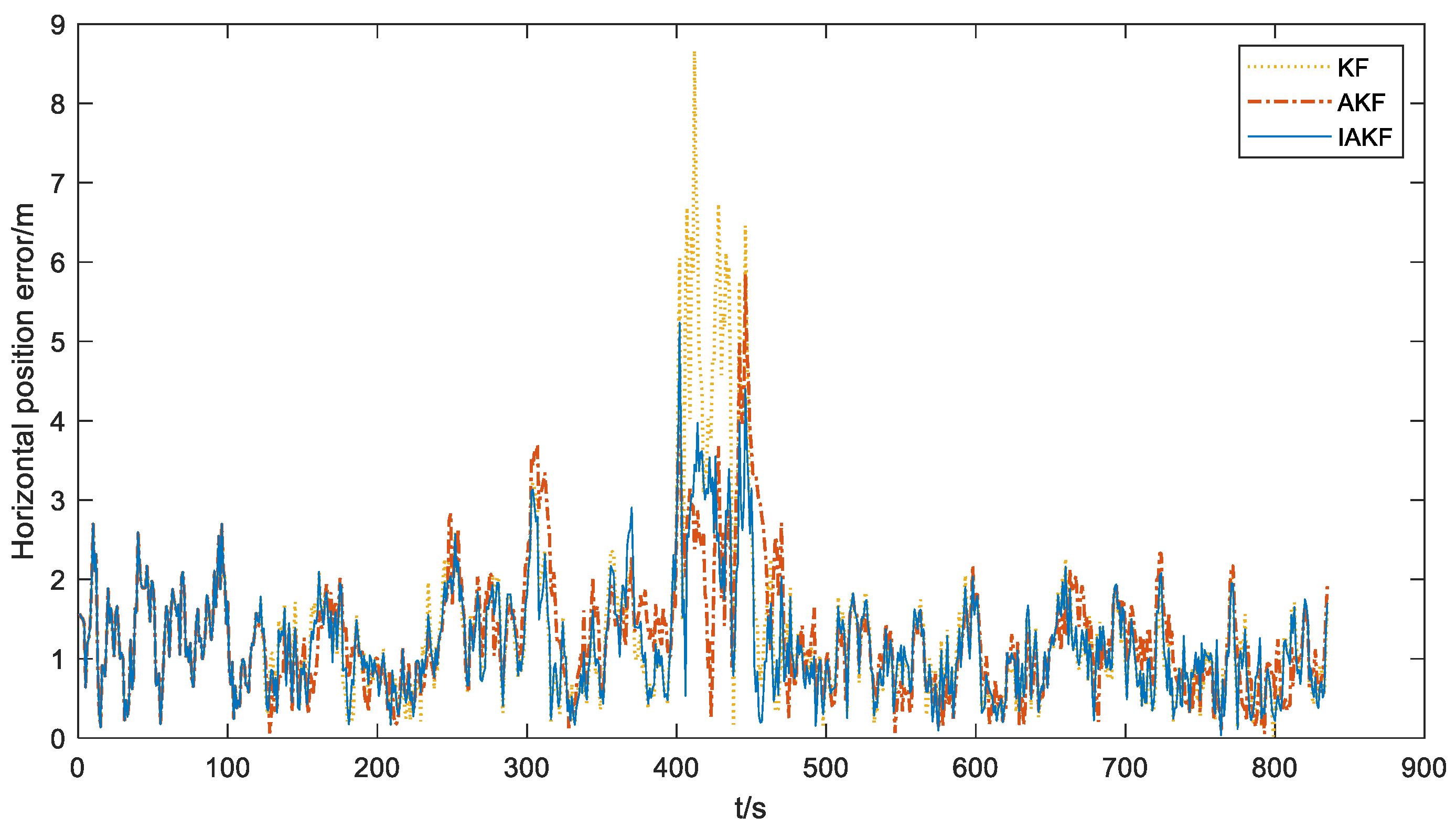
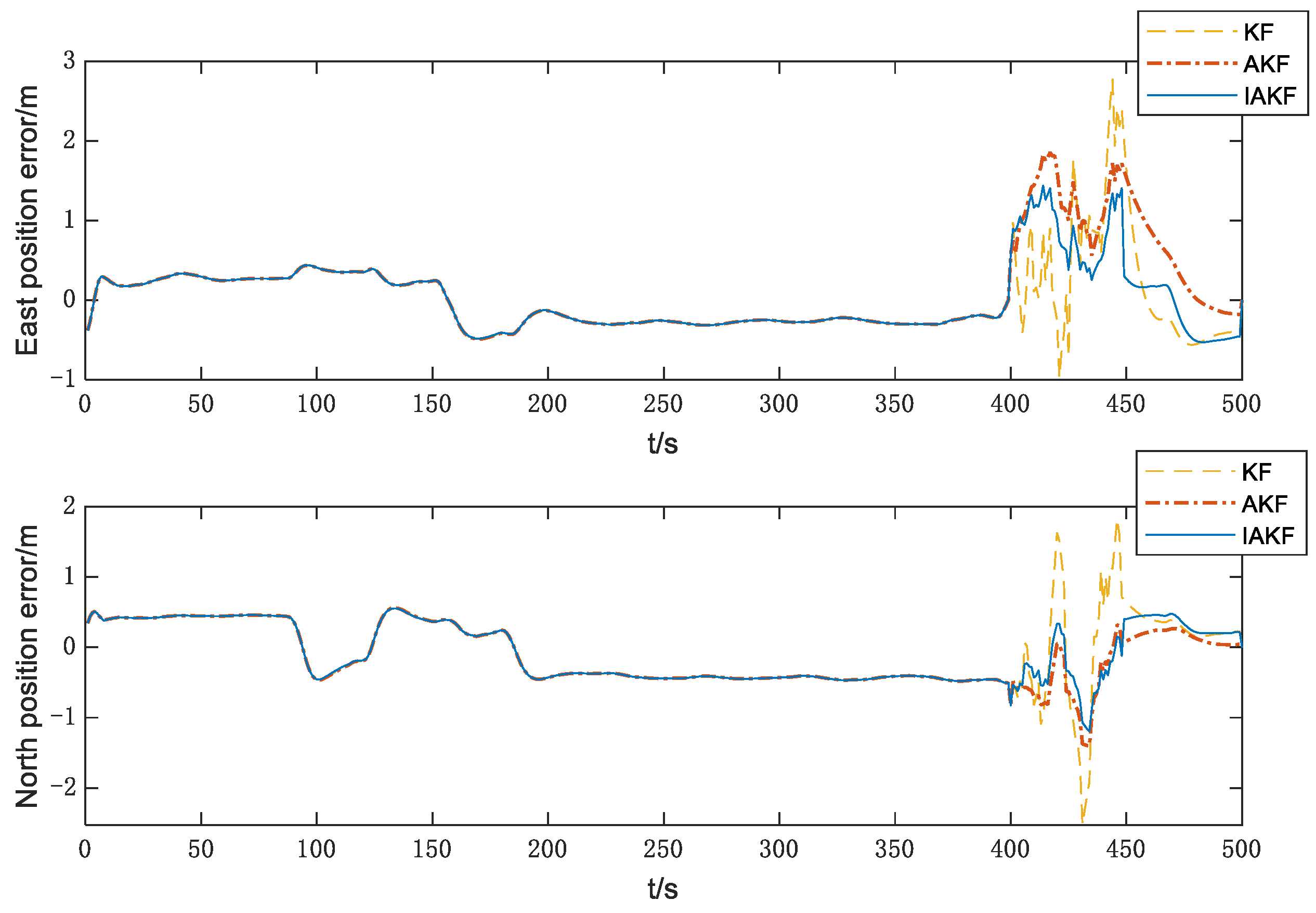
4.2. Real Vehicle Experiment
5. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gong, Y.; Feng, H.; Zhang, C. Research on the Development Strategy of the Internet of Vehicles. J. Phys. Conf. Ser. 2021, 1907, 012063. [Google Scholar] [CrossRef]
- Ma, C.; Dai, G.; Zhou, J. Short-term traffic flow prediction for urban road sections based on time series analysis and LSTM_BILSTM method. IEEE Trans. Intell. Transp. Syst. 2022, 23, 5615–5624. [Google Scholar] [CrossRef]
- Tian, D.; Wu, G.; Kanok, B. Performance Measurement Evaluation Framework and Co-Benefit\/Tradeoff Analysis for Connected and Automated Vehicles (CAV) Applications: A Survey. IEEE Intell. Transp. Syst. Mag. 2018, 10, 110–122. [Google Scholar] [CrossRef]
- Min, H.; Song, X.; Cheng, C. Research on Development of Vehicle Collaborative Localization in Internet of Vehicles Environment. Unmanned Syst. Technol. 2021, 4, 8–14. [Google Scholar]
- Liu, J.; Cao, C. Development status and trend of global navigation satellite system. J. Navig. Position 2020, 8, 22. [Google Scholar]
- Ning, X.; Gui, M.; Xu, Y.; Bai, X.; Fang, J. INS/VNS/CNS integrated navigation method for planetary rovers. Aerosp. Sci. Technol. 2016, 48, 102–114. [Google Scholar] [CrossRef]
- Qiao, D.; Zhang, Z.; Liu, F.; Sun, B. Location Optimization Model of a Greenhouse Sensor Based on Multisource Data Fusion. Complexity 2022, 2022, 3258549. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, S.; Zhang, Q. Adaptive Estimation of Multiple Fading Factors for GPS/INS Integrated Navigation Systems. Sensors 2017, 17, 1254. [Google Scholar] [CrossRef]
- Zhao, H.; Xiong, Z.; Shi, L.; Yu, F.; Liu, J. A robust filtering algorithm for integrated navigation system of aerospace vehicle in launch inertial coordinate. Aerosp. Sci. Technol. 2016, 58, 629–640. [Google Scholar] [CrossRef]
- Davari, N.; Gholami, A.; Shabani, M. Performance Enhancement of GPS/INS Integrated Navigation System Using Wavelet Based De-noising method. AUT J. Electr. Eng. 2016, 48, 101–112. [Google Scholar]
- Na, J.; Huang, Y.; Wu, X.; Su, S.; Li, G. Adaptive finite-time fuzzy control of nonlinear active suspension systems with input delay. IEEE Trans. Cybern. 2019, 50, 2639–2650. [Google Scholar] [CrossRef] [PubMed]
- Jin, X.; Gong, W.; Kong, J. A Planar Flow-Based Variational Auto-Encoder Prediction Model for Time Series Data. Mathematics 2022, 10, 610. [Google Scholar] [CrossRef]
- Chen, Q.; Tao, M.; He, X.; Tao, L. Fuzzy adaptive nonsingular fixed-time attitude tracking control of quadrotor UAVs. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2864–2877. [Google Scholar] [CrossRef]
- Yan, G.; Deng, Y. Review on Practical Kalman Filtering Techniques in Traditional Integrated Navigation System. Navig. Position Timing 2020, 7, 50–64. [Google Scholar]
- Jiang, C.; Zhang, S.; Zhang, Q. A novel robust interval Kalman filter algorithm for GPS/INS integrated navigation. J. Sens. 2016, 2016, 3727241. [Google Scholar] [CrossRef]
- Lin, X.; Liu, S.; Shi, Z. Multi-Sensor Signal Denoising Based on Adaptive Kalman Filter. Comput. Simul. 2022, 39, 507–511. [Google Scholar]
- Pan, C.; Gao, J.; Li, Z.; Qian, N.; Li, F. Multiple fading factors-based strong tracking variational Bayesian adaptive Kalman filter. Measurement 2021, 176, 109139. [Google Scholar] [CrossRef]
- Sun, L.; Hou, Y. Application of Sage-Husa adaptive filtering in trajectory prediction of moving obstacles. Manuf. Autom. 2022, 44, 73–75. [Google Scholar]
- Li, W.; Chen, M.; Zhang, L.; Chen, R. Adaptive Kalman Filter Based on Innovation Sequence for SINS/DVL Integrated Navigation. J. Ordnance Equip. Eng. 2020, 41, 225–229. [Google Scholar]
- Liu, Y.; Fan, X.; Lv, C.; Wu, J.; Li, L.; Ding, D. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles. Mech. Syst. Signal Process. 2018, 100, 605–616. [Google Scholar] [CrossRef]
- Guo, S.; Wu, M.; Xu, J.; Li, J. Adaptive Fading Kalman Filter and Its Application in SINS Initial Alignment. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 1667–1672. [Google Scholar]
- Wang, J.; Chen, X.; Yang, P. Adaptive H-infinite kalman filter based on multiple fading factors and its application in unmanned underwater vehicle. Isa Trans. 2021, 108, 295–304. [Google Scholar] [CrossRef] [PubMed]
- Sun, B.; Zhang, Z.; Liu, S.; Yan, X.; Yang, C. Integrated Navigation Algorithm Based on Multiple Fading Factors Kalman Filter. Sensors 2022, 22, 5081. [Google Scholar] [CrossRef]
- Yu, T.; Xu, A.; Fu, X.; Xie, Y.; Sun, W. An integrated navigation and positioning method of adaptive Kalman filtering. J. Navig. Position 2017, 5, 101–104. [Google Scholar]
- Ru, G.; Feng, P.; Deng, Y. Adaptive filtering algorithm with switching state for GPS/INS. Eng. J. Wuhan Univ. 2015, 48, 574–579. [Google Scholar]
- Gao, X.; Luo, H.; Ning, B.; Zhao, F.; Bao, L.; Gong, Y.; Xiao, Y.; Jiang, J. RL-AKF: An Adaptive Kalman Filter Navigation Algorithm Based on Reinforcement Learning for Ground Vehicles. Remote Sens. 2020, 12, 1704. [Google Scholar] [CrossRef]
- Yan, P.; Jiang, J.; Zhang, F.; Xie, D.; Wu, J.; Zhang, C.; Tang, Y.; Liu, J. An Improved Adaptive Kalman Filter for a Single Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation Module. Remote Sens. 2021, 13, 4317. [Google Scholar] [CrossRef]
- Yang, Y.; Li, F.; Gao, Y.; Mao, Y. Multi-Sensor Combined Measurement While Drilling Based on the Improved Adaptive Fading Square Root Unscented Kalman Filter. Sensors 2020, 20, 1897. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z.; Mu, D.; Gao, S.; Zhong, Y.; Gu, C. Adaptive unscented Kalman filter based on maximum posterior and random weighting. Aerosp. Sci. Technol. 2017, 71, 12–24. [Google Scholar] [CrossRef]
- Yang, C.; Guo, J.; Zhang, L.; Chen, Q. Fuzzy adaptive unscented Kalman filter integrated navigation algorithm using chi-square test. Control. Decis. 2018, 33, 81–87. [Google Scholar]
- Qin, F.; Song, Z.; Wu, Z. Adaptive Robust Filter for INS/CNS/GNSS Integrated Navigation of the LEO Spacecraft. Aerosp. Control. Appl. 2017, 43, 55–59. [Google Scholar]
- Zhou, X.; Zhang, H.; He, T.; Li, X. Research on adaptive Kalman filter algorithm for GPS/INS loosely coupled integrated navigation. J. Time Freq. 2020, 43, 222–230. [Google Scholar]
- Xu, D.; He, R.; Shen, F.; Gai, M. Adaptive fading Kalman filter based on innovation covariance. Syst. Eng. Electron. 2011, 33, 2696–2699. [Google Scholar]
- Xue, W.; Zhang, B.; Li, S. Application of New Information Adaptive Kalman Filter in Integrated Navigation. GNSS World China 2014, 39, 8–11. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMU Parameter | Value |
|---|---|
| INS out frequency | 100 Hz |
| Gyro bias | 5°/h |
| Gyro angle random walk | 0.5°/sqrt(h) |
| Accelerometer bias | 400 ug |
| Position Error (m) | |||
|---|---|---|---|
| North | East | Horizontal | |
| Mean | 1.843 | 1.567 | 2.945 |
| Max | 16.75 | 16.942 | 24.382 |
| Error Mean (m) | Error Max (m) | |||||
|---|---|---|---|---|---|---|
| East | North | Horizontal | East | North | Horizontal | |
| GPS | 1.843 | 1.567 | 2.945 | 16.75 | 16.942 | 24.382 |
| KF | 0.950 | 0.717 | 1.316 | 7.839 | 5.692 | 8.668 |
| AKF | 0.836 | 0.765 | 1.279 | 3.707 | 5.463 | 5.845 |
| IAKF | 0.825 | 0.685 | 1.198 | 5.023 | 3.983 | 5.234 |
| IMU Parameter | Value |
|---|---|
| INS out frequency | 100 Hz |
| Gyro bias | 0.5°/h |
| Gyro angle random walk | 0.12°/sqrt(h) |
| Accelerometer bias | 50 ug |
| Error Mean (m) | Error Max (m) | |||||
|---|---|---|---|---|---|---|
| East | North | Horizontal | East | North | Horizontal | |
| GPS | 0.5468 | 0.862 | 1.133 | 6.295 | 7.308 | 7.742 |
| KF | 0.355 | 0.444 | 0.595 | 2.776 | 2.524 | 3.026 |
| AKF | 0.394 | 0.391 | 0.593 | 1.855 | 1.400 | 2.002 |
| IAKF | 0.340 | 0.397 | 0.553 | 1.438 | 1.193 | 1.538 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Zhang, Z.; Qiao, D.; Mu, X.; Hu, X. An Improved Innovation Adaptive Kalman Filter for Integrated INS/GPS Navigation. Sustainability 2022, 14, 11230. https://doi.org/10.3390/su141811230
Sun B, Zhang Z, Qiao D, Mu X, Hu X. An Improved Innovation Adaptive Kalman Filter for Integrated INS/GPS Navigation. Sustainability. 2022; 14(18):11230. https://doi.org/10.3390/su141811230
Chicago/Turabian StyleSun, Bo, Zhenwei Zhang, Dianju Qiao, Xiaotong Mu, and Xiaochen Hu. 2022. "An Improved Innovation Adaptive Kalman Filter for Integrated INS/GPS Navigation" Sustainability 14, no. 18: 11230. https://doi.org/10.3390/su141811230
APA StyleSun, B., Zhang, Z., Qiao, D., Mu, X., & Hu, X. (2022). An Improved Innovation Adaptive Kalman Filter for Integrated INS/GPS Navigation. Sustainability, 14(18), 11230. https://doi.org/10.3390/su141811230