
Citizen Science for Traffic Monitoring: Investigating the Potentials for Complementing Traffic Counters with Crowdsourced Data



Abstract
:1. Introduction
2. Background
3. Methods
3.1. Data Collection
3.2. Data Preprocessing
3.3. Matching the Counters
3.4. Additional Features
3.5. Regression of Inductive Loop Counter Data
4. Results
4.1. Telraam Counters Positively Correlate with Inductive Loop Counters
4.2. Prediction Accuracy Increases with the Number of Features
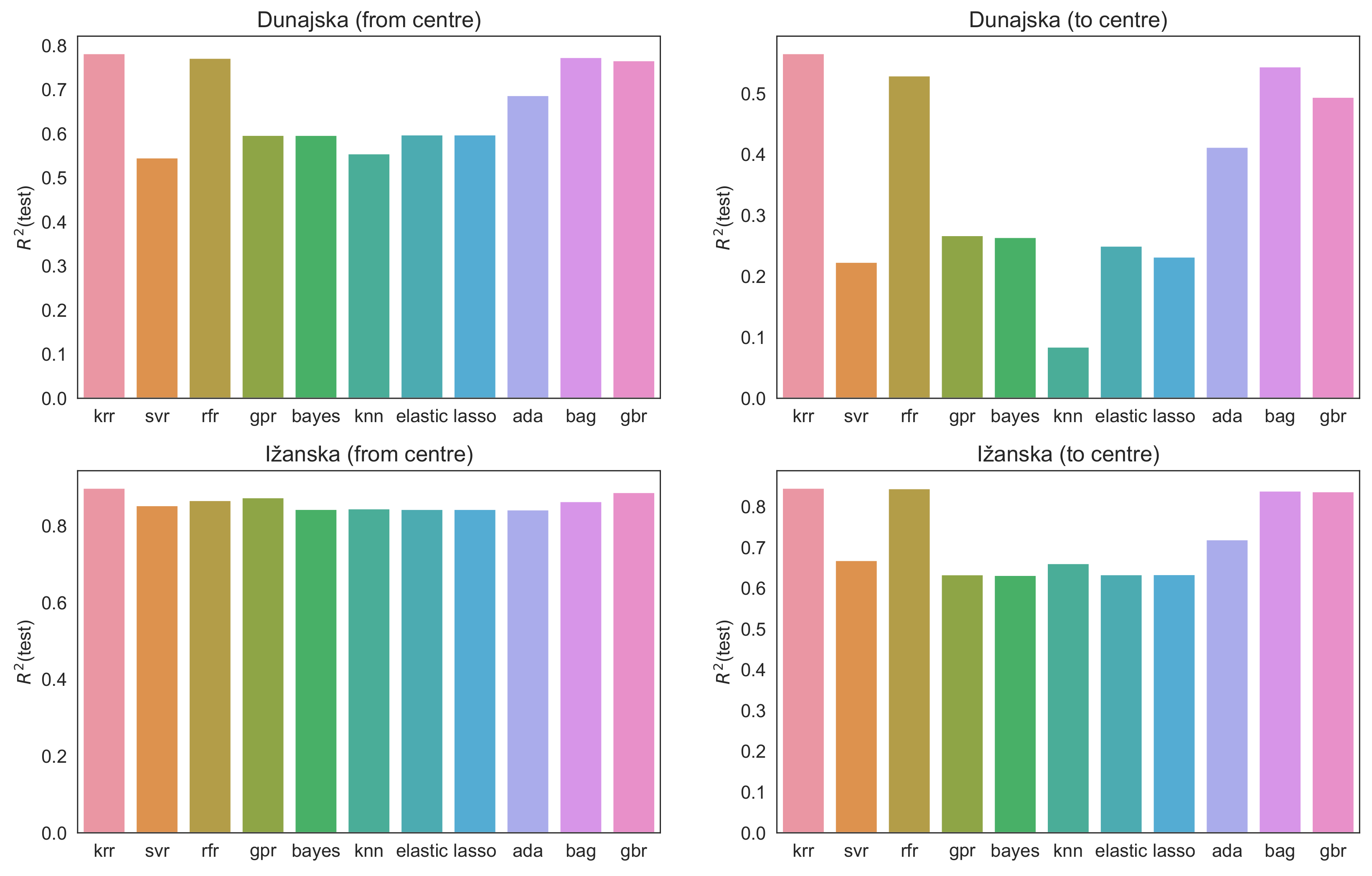
4.3. Optimal Regression Models Are Consistent through Different Segments
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADA | AdaBoost |
| API | application programming interface |
| Bbox | bounding box |
| GBR | gradient boosting regression |
| GPR | Gaussian process regression |
| GPS | global positioning system |
| ILC | inductive loop counter |
| KNN | K-nearest neighbours |
| KRR | kernel ridge regression |
| LASSO | least absolute shrinkage and selection operator |
| LiDAR | light detection and ranging |
| MOL | Municipality of Ljubljana |
| RFR | random forest regression |
| SVR | support vector regression |
| YOLO | you only look once |
References
- Zhao, P.; Hu, H. Geographical patterns of traffic congestion in growing megacities: Big data analytics from Beijing. Cities 2019, 92, 164–174. [Google Scholar] [CrossRef]
- Buzási, A.; Csete, M. Sustainability indicators in assessing urban transport systems. Period. Polytech. Transp. Eng. 2015, 43, 138–145. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.; Benneker, K. Assessing collaborative planning and the added value of planning support apps in The Netherlands. Environ. Plan. B Urban Anal. City Sci. 2021. [Google Scholar] [CrossRef]
- Offenhuber, D.; Ratti, C. Decoding the City; Birkhäuser: Basel, Switzerland, 2014. [Google Scholar]
- Becken, S.; Connolly, R.M.; Chen, J.; Stantic, B. A hybrid is born: Integrating collective sensing, citizen science and professional monitoring of the environment. Ecol. Inform. 2019, 52, 35–45. [Google Scholar] [CrossRef]
- Welvaert, M.; Caley, P. Citizen surveillance for environmental monitoring: Combining the efforts of citizen science and crowdsourcing in a quantitative data framework. SpringerPlus 2016, 5, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Coulson, S.; Woods, M. Citizen Sensing: An action-orientated framework for citizen science. Front. Commun. 2021, 6, 629700. [Google Scholar] [CrossRef]
- Eitzel, M.V.; Cappadonna, J.L.; Santos-Lang, C.; Duerr, R.E.; Virapongse, A.; West, S.E.; Kyba, C.; Bowser, A.; Cooper, C.B.; Sforzi, A.; et al. Citizen science terminology matters: Exploring key terms. Citiz. Sci. Theory Pract. 2017, 2, 1. [Google Scholar] [CrossRef] [Green Version]
- Riesch, H.; Potter, C. Citizen science as seen by scientists: Methodological, epistemological and ethical dimensions. Public Underst. Sci. 2014, 23, 107–120. [Google Scholar] [CrossRef]
- Boulos, M.N.K.; Resch, B.; Crowley, D.N.; Breslin, J.G.; Sohn, G.; Burtner, R.; Pike, W.A.; Jezierski, E.; Chuang, K.Y.S. Crowdsourcing, citizen sensing and sensor web technologies for public and environmental health surveillance and crisis management: Trends, OGC standards and application examples. Int. J. Health Geogr. 2011, 10, 1–29. [Google Scholar]
- Kosmala, M.; Wiggins, A.; Swanson, A.; Simmons, B. Assessing data quality in citizen science. Front. Ecol. Environ. 2016, 14, 551–560. [Google Scholar] [CrossRef] [Green Version]
- Uhlmann, E.L.; Ebersole, C.R.; Chartier, C.R.; Errington, T.M.; Kidwell, M.C.; Lai, C.K.; McCarthy, R.J.; Riegelman, A.; Silberzahn, R.; Nosek, B.A. Scientific utopia III: Crowdsourcing science. Perspect. Psychol. Sci. 2019, 14, 711–733. [Google Scholar] [CrossRef] [Green Version]
- Lodi, L.; Tardin, R. Citizen science contributes to the understanding of the occurrence and distribution of cetaceans in southeastern Brazil—A case study. Ocean Coast. Manag. 2018, 158, 45–55. [Google Scholar] [CrossRef]
- Ekman, K.; Weilenmann, A. Behind the scenes of planning for public participation: Planning for air-quality monitoring with low-cost sensors. J. Environ. Plan. Manag. 2021, 64, 865–882. [Google Scholar] [CrossRef]
- Telraam. Available online: https://telraam.net/ (accessed on 25 November 2021).
- Elfar, A.; Talebpour, A.; Mahmassani, H.S. Machine learning approach to short-term traffic congestion prediction in a connected environment. Transp. Res. Rec. 2018, 2672, 185–195. [Google Scholar] [CrossRef]
- Büchel, B.; Corman, F. Review on Statistical Modeling of Travel Time Variability for Road-Based Public Transport. Front. Built Environ. 2020, 6, 70. [Google Scholar] [CrossRef]
- Altintasi, O.; Tuydes-Yaman, H.; Tuncay, K. Detection of urban traffic patterns from Floating Car Data (FCD). Transp. Res. Procedia 2017, 22, 382–391. [Google Scholar] [CrossRef]
- Tasgaonkar, P.P.; Garg, R.D.; Garg, P.K. Vehicle detection and traffic estimation with sensors technologies for intelligent transportation systems. Sens. Imaging 2020, 21, 1–28. [Google Scholar] [CrossRef]
- Jain, N.K.; Saini, R.; Mittal, P. A review on traffic monitoring system techniques. In Soft Computing: Theories and Applications; Springer: Singapore, 2019; pp. 569–577. [Google Scholar]
- Middleton, D.R.; Parker, R.; Longmire, R. Investigation of Vehicle Detector Performance and ATMS Interface; Technical Report; Texas Transportation Institute, Texas A & M University System: College Station, TX, USA, 2007. [Google Scholar]
- Bellucci, P.; Cipriani, E. Data accuracy on automatic traffic counting: The SMART project results. Eur. Transp. Res. Rev. 2010, 2, 175–187. [Google Scholar] [CrossRef] [Green Version]
- Federal Highway Administration. Traffic Monitoring Guide; Technical Report; U.S. Department of Transportation: Washington, DC, USA, 2016. [Google Scholar]
- Klein, L.A.; Mills, M.K.; Gibson, D.R. Traffic Detector Handbook: Volume I; Technical Report; Turner-Fairbank Highway Research Center: McLean, VA, USA, 2006. [Google Scholar]
- Holmgren, J.; Fredriksson, H.; Dahl, M. Traffic data collection using active mobile and stationary devices. Procedia Comput. Sci. 2020, 177, 49–56. [Google Scholar] [CrossRef]
- Ahmadi, S.A.; Ghorbanian, A.; Mohammadzadeh, A. Moving vehicle detection, tracking and traffic parameter estimation from a satellite video: A perspective on a smarter city. Int. J. Remote Sens. 2019, 40, 8379–8394. [Google Scholar] [CrossRef]
- Lesani, A.; Nateghinia, E.; Miranda-Moreno, L.F. Development and evaluation of a real-time pedestrian counting system for high-volume conditions based on 2D LiDAR. Transp. Res. Part C Emerg. Technol. 2020, 114, 20–35. [Google Scholar] [CrossRef]
- Astarita, V.; Giofrè, V.P.; Guido, G.; Vitale, A. A review of traffic signal control methods and experiments based on Floating Car Data (FCD). Procedia Comput. Sci. 2020, 175, 745–751. [Google Scholar] [CrossRef]
- Ghahramani, M.; Zhou, M.; Wang, G. Urban sensing based on mobile phone data: Approaches, applications, and challenges. IEEE/CAA J. Autom. Sin. 2020, 7, 627–637. [Google Scholar] [CrossRef]
- Alkouz, B.; Al Aghbari, Z. SNSJam: Road traffic analysis and prediction by fusing data from multiple social networks. Inf. Process. Manag. 2020, 57, 102139. [Google Scholar] [CrossRef]
- Nikolaidou, A.; Papaioannou, P. Utilizing social media in transport planning and public transit quality: Survey of literature. J. Transp. Eng. Part A Syst. 2018, 144, 04018007. [Google Scholar] [CrossRef]
- Trivedi, J.D.; Mandalapu, S.D.; Dave, D.H. Vision-based Real-time Vehicle Detection and Vehicle Speed Measurement using morphology and binary logical operation. J. Ind. Inf. Integr. 2021, 100280. [Google Scholar] [CrossRef]
- Datondji, S.R.E.; Dupuis, Y.; Subirats, P.; Vasseur, P. A survey of vision-based traffic monitoring of road intersections. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2681–2698. [Google Scholar] [CrossRef]
- Unzueta, L.; Nieto, M.; Cortés, A.; Barandiaran, J.; Otaegui, O.; Sánchez, P. Adaptive multicue background subtraction for robust vehicle counting and classification. IEEE Trans. Intell. Transp. Syst. 2011, 13, 527–540. [Google Scholar] [CrossRef]
- Badino, H.; Franke, U.; Mester, R. Free Space Computation Using Stochastic Occupancy Grids and Dynamic Programming. In Proceedings of the Workshop on Dynamical Vision, ICCV, Rio de Janeiro, Brazil, 14–21 October 2007; Volume 20. [Google Scholar]
- Zhu, Y.; Comaniciu, D.; Pellkofer, M.; Koehler, T. Reliable detection of overtaking vehicles using robust information fusion. IEEE Trans. Intell. Transp. Syst. 2006, 7, 401–414. [Google Scholar] [CrossRef]
- Zhou, J.; Gao, D.; Zhang, D. Moving vehicle detection for automatic traffic monitoring. IEEE Trans. Veh. Technol. 2007, 56, 51–59. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.Q.; Zheng, P.; Xu, S.t.; Wu, X. Object detection with deep learning: A review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, H.; Yu, Y.; Cai, Y.; Chen, X.; Chen, L.; Liu, Q. A comparative study of state-of-the-art deep learning algorithms for vehicle detection. IEEE Intell. Transp. Syst. Mag. 2019, 11, 82–95. [Google Scholar] [CrossRef]
- Song, H.; Liang, H.; Li, H.; Dai, Z.; Yun, X. Vision-based vehicle detection and counting system using deep learning in highway scenes. Eur. Transp. Res. Rev. 2019, 11, 1–16. [Google Scholar] [CrossRef] [Green Version]
- O’Mahony, N.; Campbell, S.; Carvalho, A.; Harapanahalli, S.; Hernandez, G.V.; Krpalkova, L.; Riordan, D.; Walsh, J. Deep learning vs. traditional computer vision. In Science and Information Conference; Springer: Cham, Switzerland, 2019; pp. 128–144. [Google Scholar]
- Yang, H.; Zhang, Y.; Zhang, Y.; Meng, H.; Li, S.; Dai, X. A Fast Vehicle Counting and Traffic Volume Estimation Method Based on Convolutional Neural Network. IEEE Access 2021, 9, 150522–150531. [Google Scholar] [CrossRef]
- Wang, Y.; Ban, X.; Wang, H.; Wu, D.; Wang, H.; Yang, S.; Liu, S.; Lai, J. Detection and classification of moving vehicle from video using multiple spatio-temporal features. IEEE Access 2019, 7, 80287–80299. [Google Scholar] [CrossRef]
- Zhang, X.; Gao, H.; Xue, C.; Zhao, J.; Liu, Y. Real-time vehicle detection and tracking using improved histogram of gradient features and Kalman filters. Int. J. Adv. Robot. Syst. 2018, 15, 1729881417749949. [Google Scholar] [CrossRef]
- Azimjonov, J.; Özmen, A. A real-time vehicle detection and a novel vehicle tracking systems for estimating and monitoring traffic flow on highways. Adv. Eng. Inform. 2021, 50, 101393. [Google Scholar] [CrossRef]
- Meng, F.; Wong, S.C.; Wong, W.; Li, Y. Estimation of scaling factors for traffic counts based on stationary and mobile sources of data. Int. J. Intell. Transp. Syst. Res. 2017, 15, 180–191. [Google Scholar] [CrossRef] [Green Version]
- Tavasszy, L.; De Jong, G. Modelling Freight Transport; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Den Broeder, L.; Lemmens, L.; Uysal, S.; Kauw, K.; Weekenborg, J.; Schönenberger, M.; Klooster-Kwakkelstein, S.; Schoenmakers, M.; Scharwächter, W.; Van de Weerd, A.; et al. Public health citizen science; perceived impacts on citizen scientists: A case study in a low-income neighbourhood in the Netherlands. Citiz. Sci. Theory Pract. 2017, 2, 7. [Google Scholar] [CrossRef] [Green Version]
- Aoki, P.; Woodruff, A.; Yellapragada, B.; Willett, W. Environmental protection and agency: Motivations, capacity, and goals in participatory sensing. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 3138–3150. [Google Scholar]
- Bria, F.; Gascó, M.; Kresin, F. Growing a Digital Social Innovation Ecosystem for Europe; Technical Report; European Commission: Brussels, Belgium, 2015. [Google Scholar]
- Visual Crossing Weather History API. Available online: https://www.visualcrossing.com/weather-api (accessed on 15 November 2021).
- Vovk, V. Kernel ridge regression. In Empirical Inference; Springer: Berlin/Heidelberg, Germany, 2013; pp. 105–116. [Google Scholar]
- Awad, M.; Khanna, R. Support vector regression. In Efficient Learning Machines; Springer: Berlin/Heidelberg, Germany, 2015; pp. 67–80. [Google Scholar]
- Segal, M. Machine Learning Benchmarks and Random Forest Regression; Technical Report; Center for Bioinformatics & Molecular Biostatistics, University of California: San Francisco, CA, USA, 2003. [Google Scholar]
- Schulz, E.; Speekenbrink, M.; Krause, A. A tutorial on Gaussian process regression: Modelling, exploring, and exploiting functions. J. Math. Psychol. 2018, 85, 1–16. [Google Scholar] [CrossRef]
- Shi, Q.; Abdel-Aty, M.; Lee, J. A Bayesian ridge regression analysis of congestion’s impact on urban expressway safety. Accid. Anal. Prev. 2016, 88, 124–137. [Google Scholar] [CrossRef] [PubMed]
- Maltamo, M.; Kangas, A. Methods based on k-nearest neighbor regression in the prediction of basal area diameter distribution. Can. J. For. Res. 1998, 28, 1107–1115. [Google Scholar] [CrossRef]
- Zou, H.; Hastie, T. Regularization and variable selection via the elastic net. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 2005, 67, 301–320. [Google Scholar] [CrossRef] [Green Version]
- Ranstam, J.; Cook, J. LASSO regression. J. Br. Surg. 2018, 105, 1348. [Google Scholar] [CrossRef]
- Schapire, R.E. Explaining adaboost. In Empirical Inference; Springer: Berlin/Heidelberg, Germany, 2013; pp. 37–52. [Google Scholar]
- Quinlan, J.R. Bagging, boosting, and C4. 5. In Proceedings of the Thirteenth National Conference on Artificial Intelligence (AAAI-96), Portland, OR, USA, 4–8 August 1996; pp. 725–730. [Google Scholar]
- Zhang, Y.; Haghani, A. A gradient boosting method to improve travel time prediction. Transp. Res. Part C Emerg. Technol. 2015, 58, 308–324. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Balázs, B.; Mooney, P.; Nováková, E.; Bastin, L.; Arsanjani, J.J. Data quality in citizen science. In The Science of Citizen Science; Springer: Cham, Switzerland, 2021; p. 139. [Google Scholar]
- Jafari, M. Optimal redundant sensor configuration for accuracy increasing in space inertial navigation system. Aerosp. Sci. Technol. 2015, 47, 467–472. [Google Scholar] [CrossRef] [Green Version]
- Weiss, M.; Allan, D.; Davis, D.; Levine, J. Smart clock: A new time. IEEE Trans. Instrum. Meas. 1992, 41, 915–918. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Segment | ILC | Telraam Counters |
|---|---|---|
| Dunajska (from centre) | 1003-116-1 | 0656-1, 0655-2 |
| Dunajska (to centre) | 1004-136-1 | 0656-2, 0655-1 |
| Ižanska (from centre) | 1040-236-1 | 0820-1, 1506-1 |
| Ižanska (to centre) | 1040-236-2 | 0820-2, 1506-2 |
| Slovenska (from centre) | 1026-136-1 | 0619-1 |
| Slovenska (to centre) | 1025-116-1 | 0619-2 |
| Škofije (towards Koper) | 686-1 | 1092-1 |
| Škofije (towards Trieste) | 686-2 | 1092-2 |
| Segment | Features | Best Model | (Train) | (Test) |
|---|---|---|---|---|
| Dunajska (from centre) | basic, 0656-1, 0655-2 | krr | 0.803 | 0.782 |
| Dunajska (to centre) | basic, 0656-2, 0655-1 | krr | 0.774 | 0.566 |
| Ižanska (from centre) | basic, 0820-1, 1506-1 | krr | 0.947 | 0.899 |
| Ižanska (to centre) | basic, 0820-2, 1506-2 | krr | 0.894 | 0.846 |
| Slovenska (from centre) | basic, 0619-1 | krr | 0.898 | 0.892 |
| Slovenska (to centre) | basic, 0619-2 | krr | 0.785 | 0.706 |
| Škofije (towards Koper) | basic, 1092-1 | gbr | 0.895 | 0.867 |
| Škofije (towards Trieste) | basic, 1092-2 | krr | 0.885 | 0.892 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Janež, M.; Verovšek, Š.; Zupančič, T.; Moškon, M. Citizen Science for Traffic Monitoring: Investigating the Potentials for Complementing Traffic Counters with Crowdsourced Data. Sustainability 2022, 14, 622. https://doi.org/10.3390/su14020622
Janež M, Verovšek Š, Zupančič T, Moškon M. Citizen Science for Traffic Monitoring: Investigating the Potentials for Complementing Traffic Counters with Crowdsourced Data. Sustainability. 2022; 14(2):622. https://doi.org/10.3390/su14020622
Chicago/Turabian StyleJanež, Miha, Špela Verovšek, Tadeja Zupančič, and Miha Moškon. 2022. "Citizen Science for Traffic Monitoring: Investigating the Potentials for Complementing Traffic Counters with Crowdsourced Data" Sustainability 14, no. 2: 622. https://doi.org/10.3390/su14020622
APA StyleJanež, M., Verovšek, Š., Zupančič, T., & Moškon, M. (2022). Citizen Science for Traffic Monitoring: Investigating the Potentials for Complementing Traffic Counters with Crowdsourced Data. Sustainability, 14(2), 622. https://doi.org/10.3390/su14020622