
Application and Evaluation of a Non-Accident-Based Approach to Road Safety Analysis Based on Infrastructure-Related Human Factors



Abstract
:1. Introduction
2. Materials and Methods
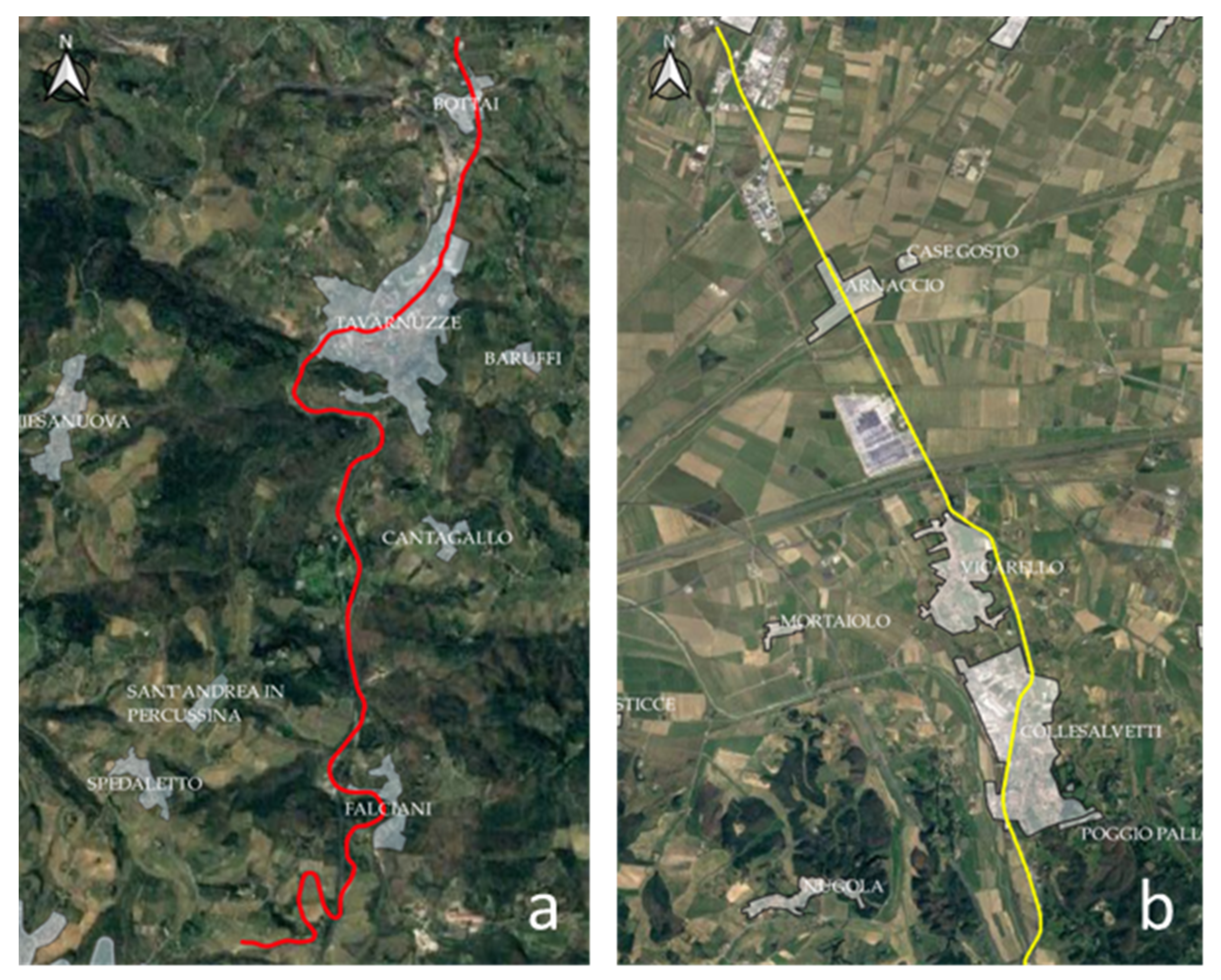
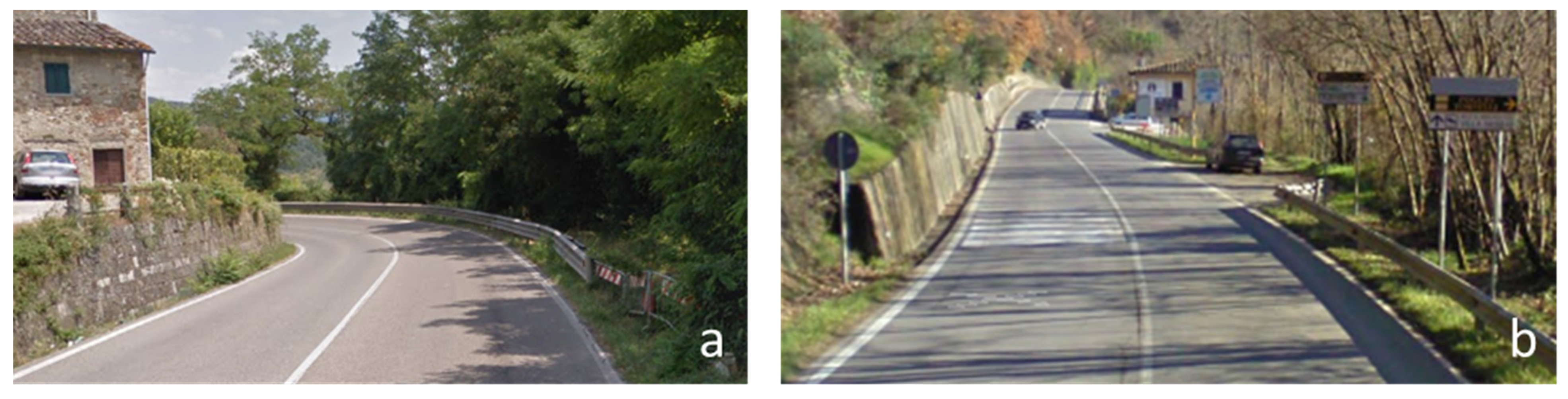
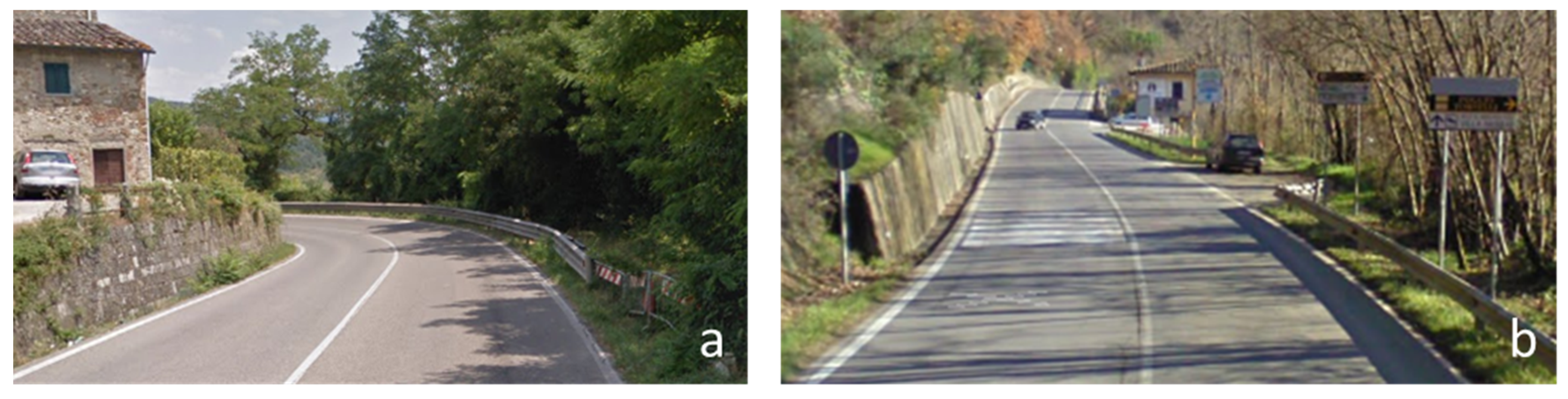
2.1. Test Roads
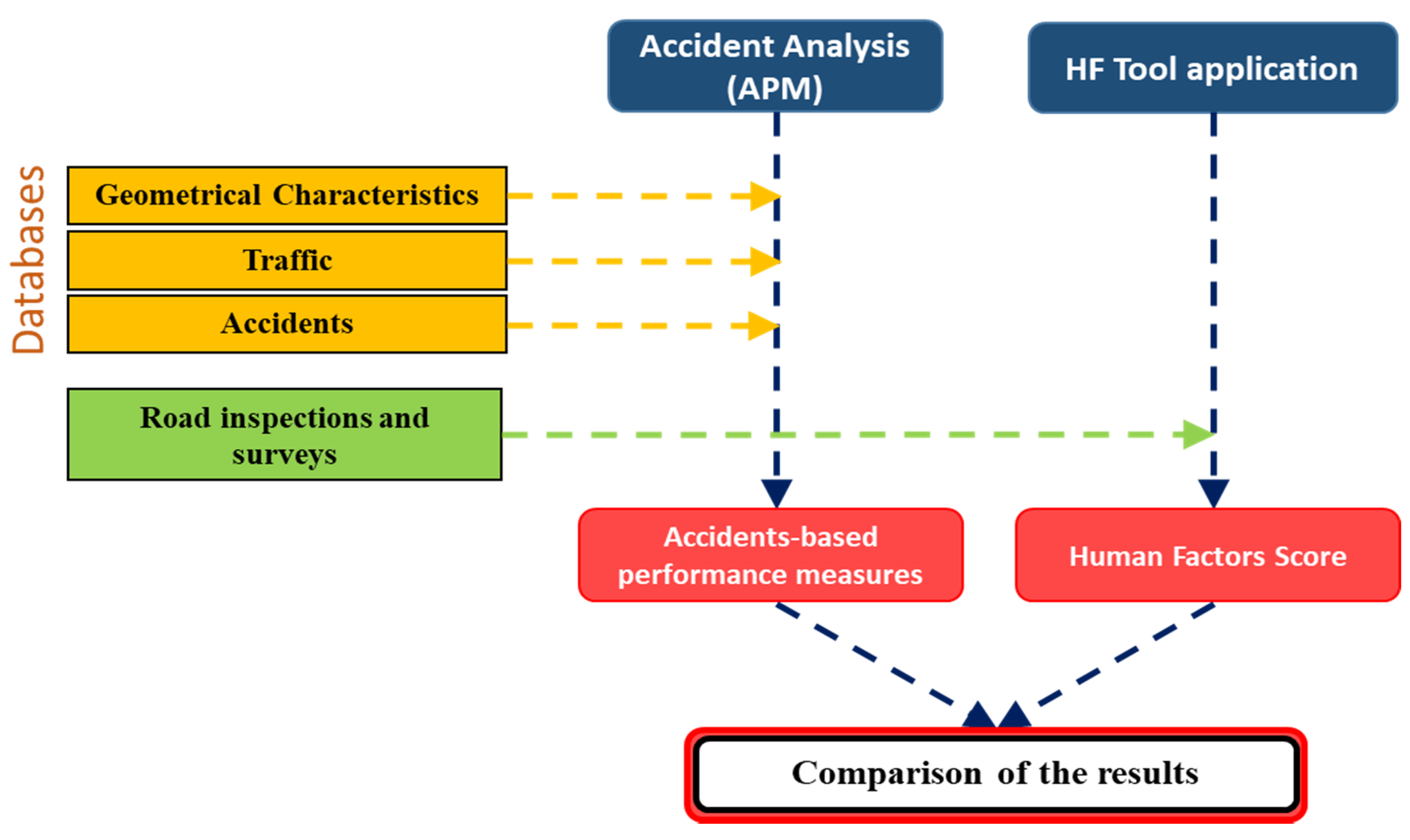
2.2. Procedure
2.3. Data Overview
2.4. Test Roads Segmentation
- accident triggering factors: these are located far away from the crash location reported in the crash reports, depending on speed and accident dynamics. Too-short road segments could be burdened by accidents that were caused by road deficiencies of a preceding road segment;
- NSS management procedure: too-short road segments require high efforts in data collection and management. This has also been stated in the HSM [17], where the suggested minimum length is 0.1 mi (about 160 m);
- critical segments identification: too-long segmentation will not help the identification of critical locations.
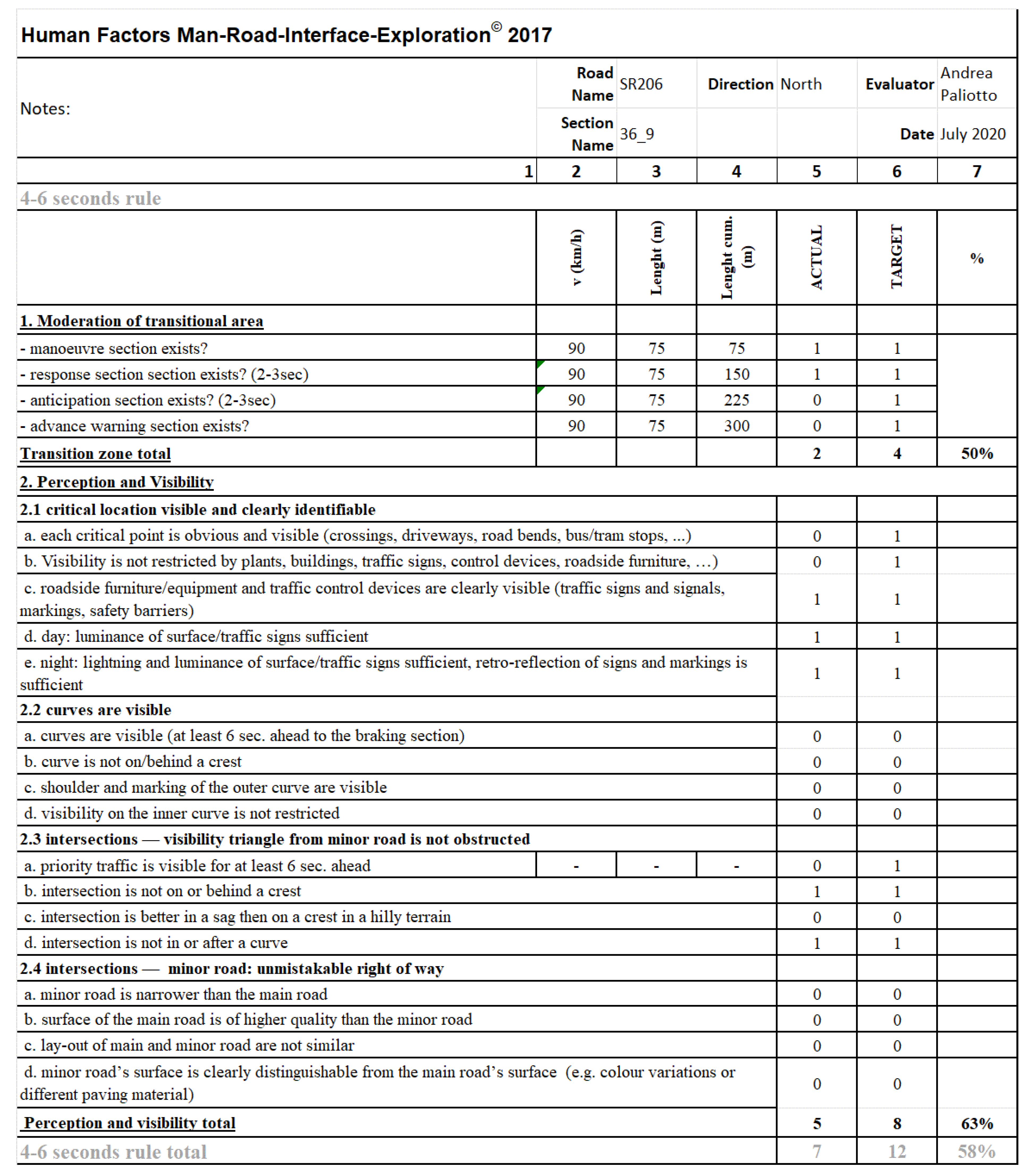
2.5. The Human Factors Evaluation Tool
- i = number of the considered condition
- n = total number of conditions
- ACTUAL = score in the “ACTUAL” column
- TARGET = score in the “TARGET” column
- Low risk: HFS > 60%
- Medium risk: HFS > 40% but <60%
- High risk: HFS < 40%
- each homogeneous segment was analyzed in both directions; then, a merge of the results was made considering the worst results for each HF demand;
- in processing the checklist of the first HF rule (4–6 s rule), the subsection 1 (“Moderation of transitional area” in Figure 6) was fulfilled for each identified critical point present in each HS, and the worst result was retained in the HFS calculation;
- if one type of critical point was present several times along one segment (for instance, multiple curves), the worst result was taken.
2.6. The HSM Procedure and Accident-Based Performance Measures
- a calibration factor was not available for the Urban arterial model; thus, the calibration factor was considered as 1;
- the calibration factor for the rural two-way two-lane model was derived from the one by Martinelli et al. [59], and it was equal to 0.292;
- the available road characteristics that were included in the calculation are shown in Table 4 (Rural: rural undivided two-lane highway; Urban: urban undivided two-lane arterial).
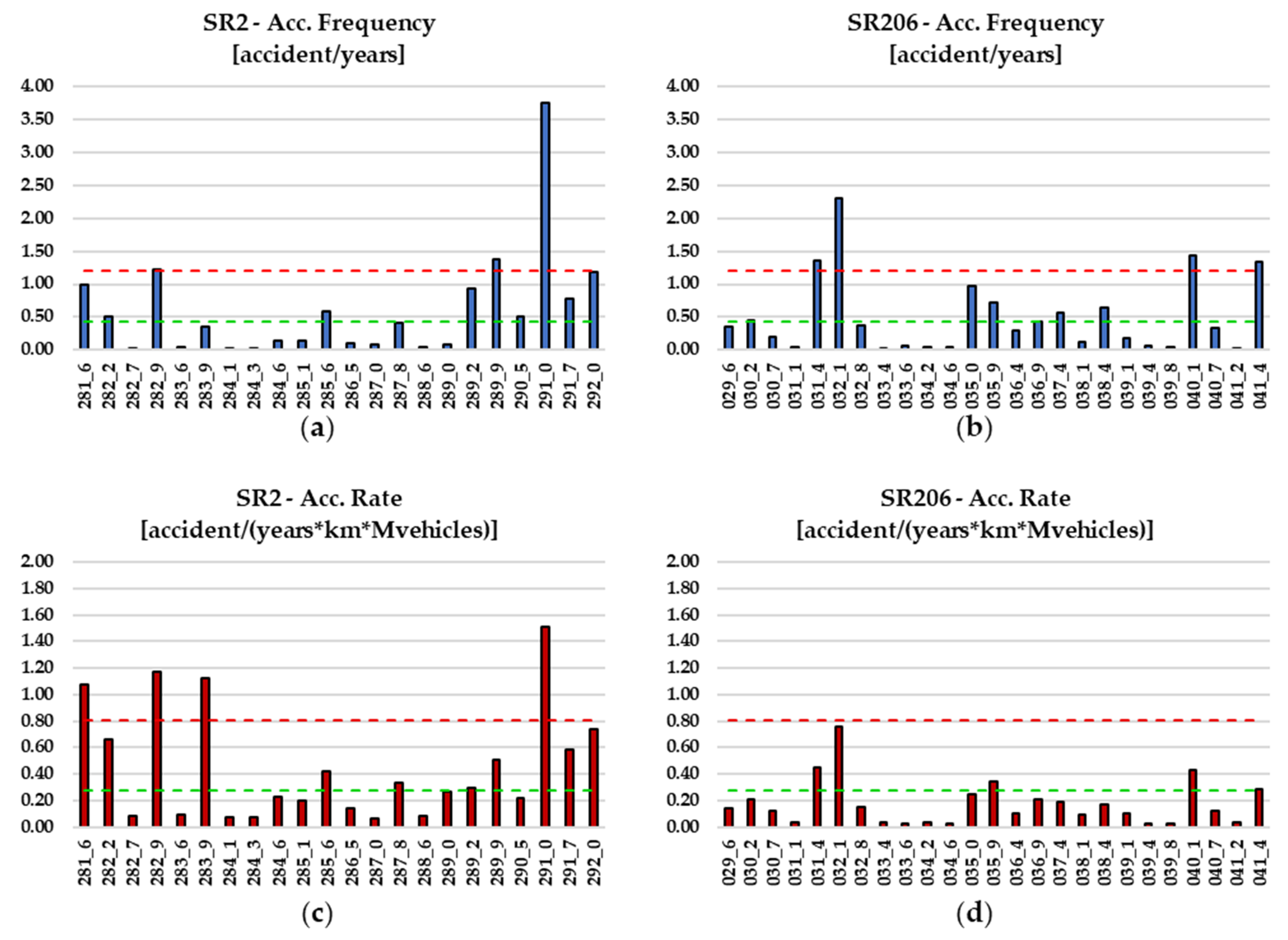
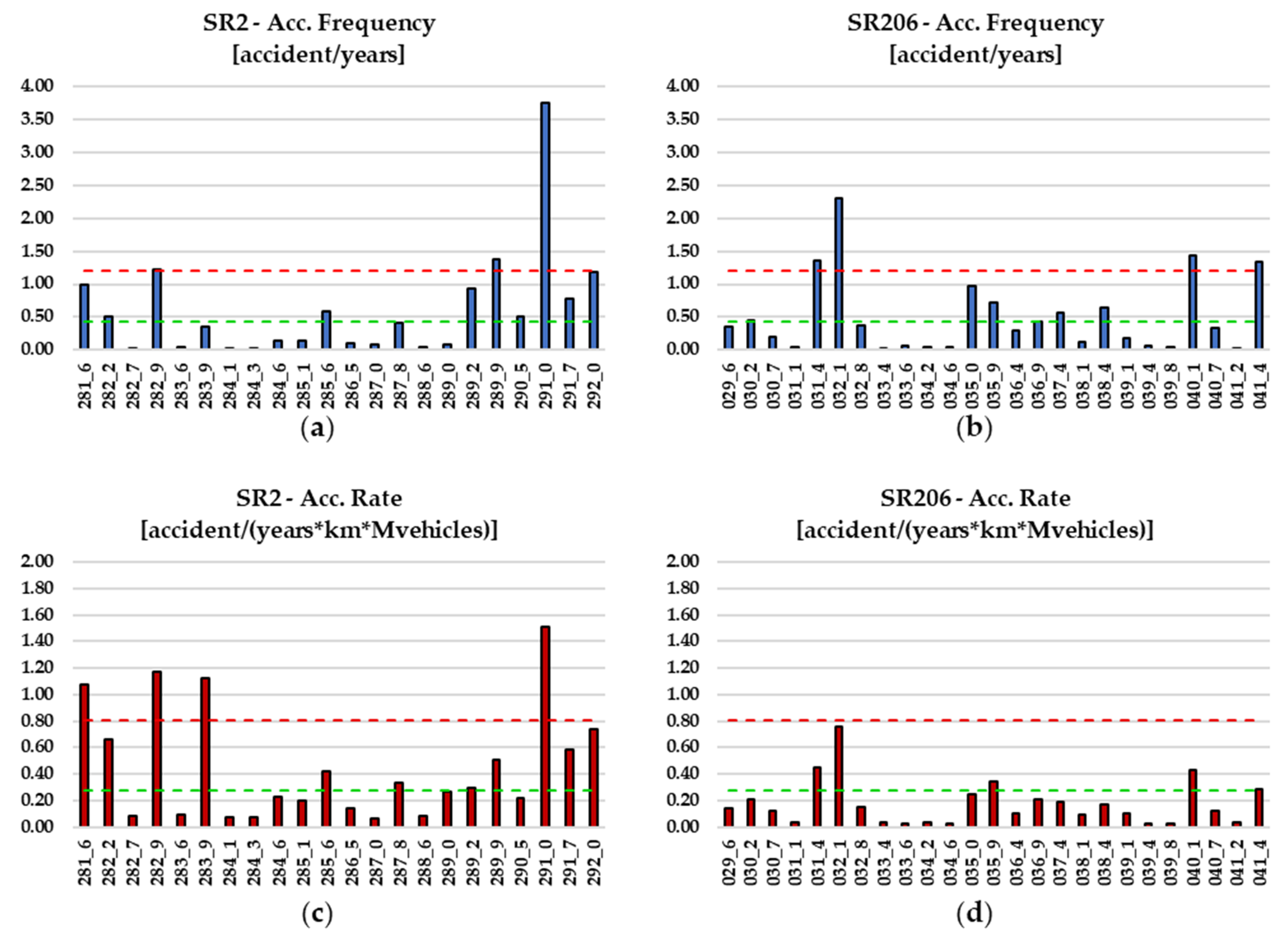
- Accident frequency (accidents/year): the frequency corresponds to the number of accidents per year in each HS, which is the expected number of accidents derived from the application of the HSM model.
- Accident rate (accidents/(years*km*Mvehicles)): this corresponds to the accident density value divided by the value of the average annual traffic that affected the segment during the analysis period. Millions of vehicles (106 vehicles) are considered as traffic units. Equation (2) shows how the accident rate was calculated.
- T = accident rate (accidents/(years*km*Mvehicles));
- n = yearly average number of accidents (accidents/year);
- L = segment length (km);
- AADTm = average between the average annual daily traffic value (AADT) of each year of the analysis period (vehicles/day).
- Tmean, which is the average of the values of an accident-based performance measure;
- T80, which is the 80th percentile of the values of an accident-based performance measure; and
- T90, which is the 90th percentile of the values of an accident-based performance measure.
- Low risk: performance measure < Tmean;
- Medium risk: performance measure > Tmean and < T90;
- High risk: performance measure > T90
2.7. Comparison
3. Results
3.1. Human Factors Score
- Most of the HSs of both the roads have a low score concerning the first rule, which means that the roads do not give enough time to detect, recognize, and correctly react to critical locations.
- SR2 is characterized by the lowest HFS values, which means that there are more deficiencies concerning the HF demand. It includes two segments (282_9 and 291_0) ranked as highly risky. The most frequent deficiencies concern the first HF rule (40%).
- SR206 has a higher score, confirming that its risk level is lower than SR2. The first HF rule is also the lowest in this case. No HS is of high risk.
- The urban segments have the lowest mean score in all rules, which means they are the most dangerous ones from the HFS point of view.
- Roadway segments present fewer safety problems than the intersection and the urban segment.
- The third rule results are generally higher than or equal to the other results, except for Urban segments, where they are low. This complies with the more complex situation of the urban environment.
3.2. Accident-Based Performance Measures
- The two considered performance measures lead to different classifications. The exposure value (traffic and segment length) considerably changes the risk ranking. For instance, the segment SR2_283_9 was the third-most critical segment concerning the accident rate, but it was the 24th when considering the accident frequency. Similarly, SR206_032_1 was the second segment with the higher accident frequency value, but it was the fifth segment considering accident rate, passing from high risk to medium risk level.
- The most critical road was SR2. It had four segments above the T90 threshold for accident rate: 281_6, 282_9, 283_9, and 291_0. The first three were in the hilly terrain and included two narrow bends (first two) and a short segment with many driveways on a bend (SR2_283_9). The fourth was in the final part of the analyzed stretch. In this section, the AADT value was higher, and there was a mixture of urban and rural environments.
- The SR206 has four segments (31_4, 32_1, 40_1, and 41_4) at high risk considering the accident frequency, while SR2 had only three segments over the T90 thresholds, which were 282_9, 289_9, and 291_0. The segments of SR206 generally “downgraded” to a lower risk if the accident rate was considered due to the higher traffic volume flowing through them.
- An almost stable ranking was recorded for segments with a low risk of accidents; 26 segments were still low-risk segments for both the performance measures out of a total of 47 segments; six segments were still of medium risk level, and only two segments were still at a high-risk level. The low-risk level group of segments mostly included SR206 segments (16 for SR206 and 10 for SR2).
3.3. Analysis and Comparison of the Results
3.3.1. Risk Level
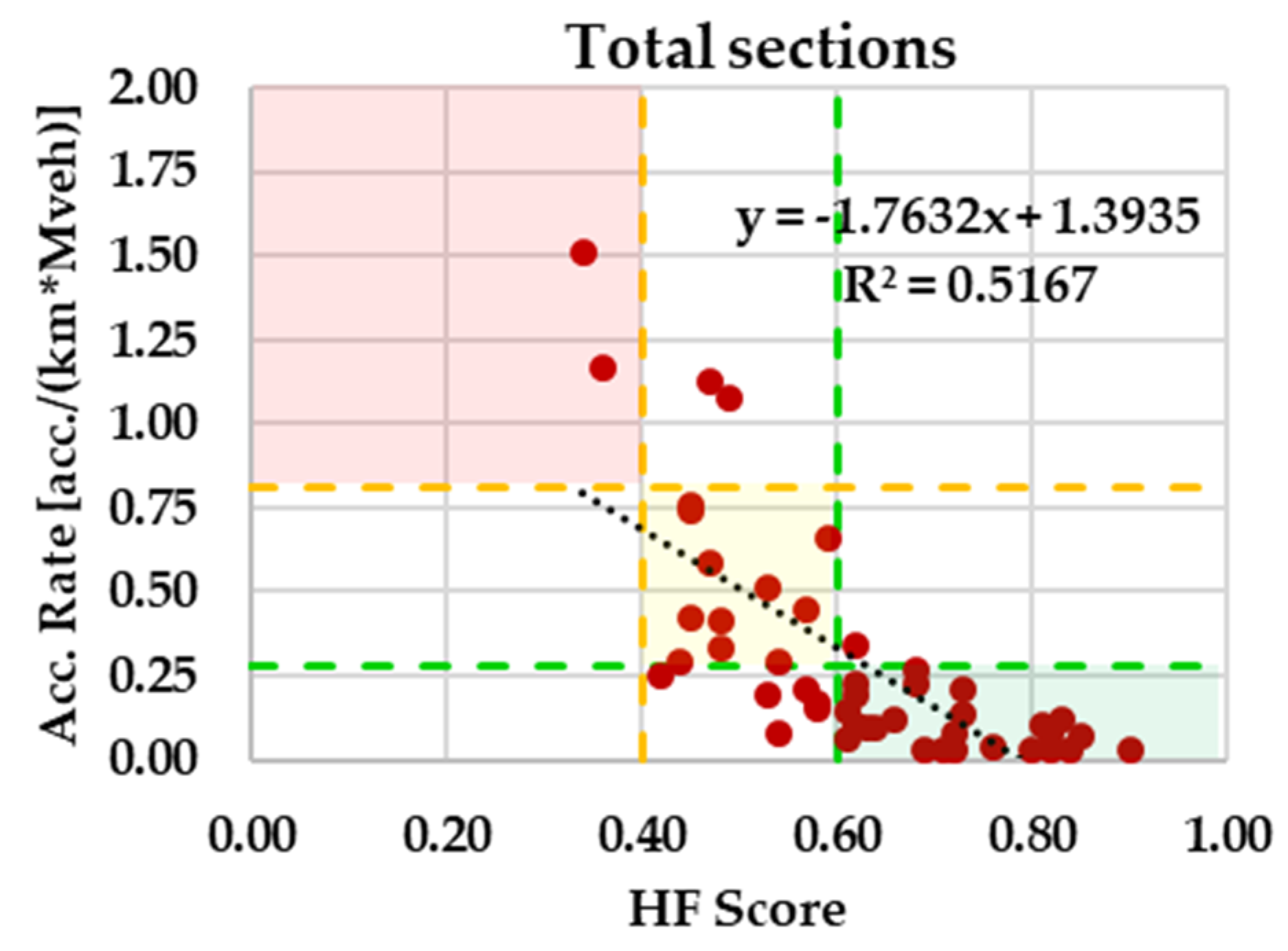
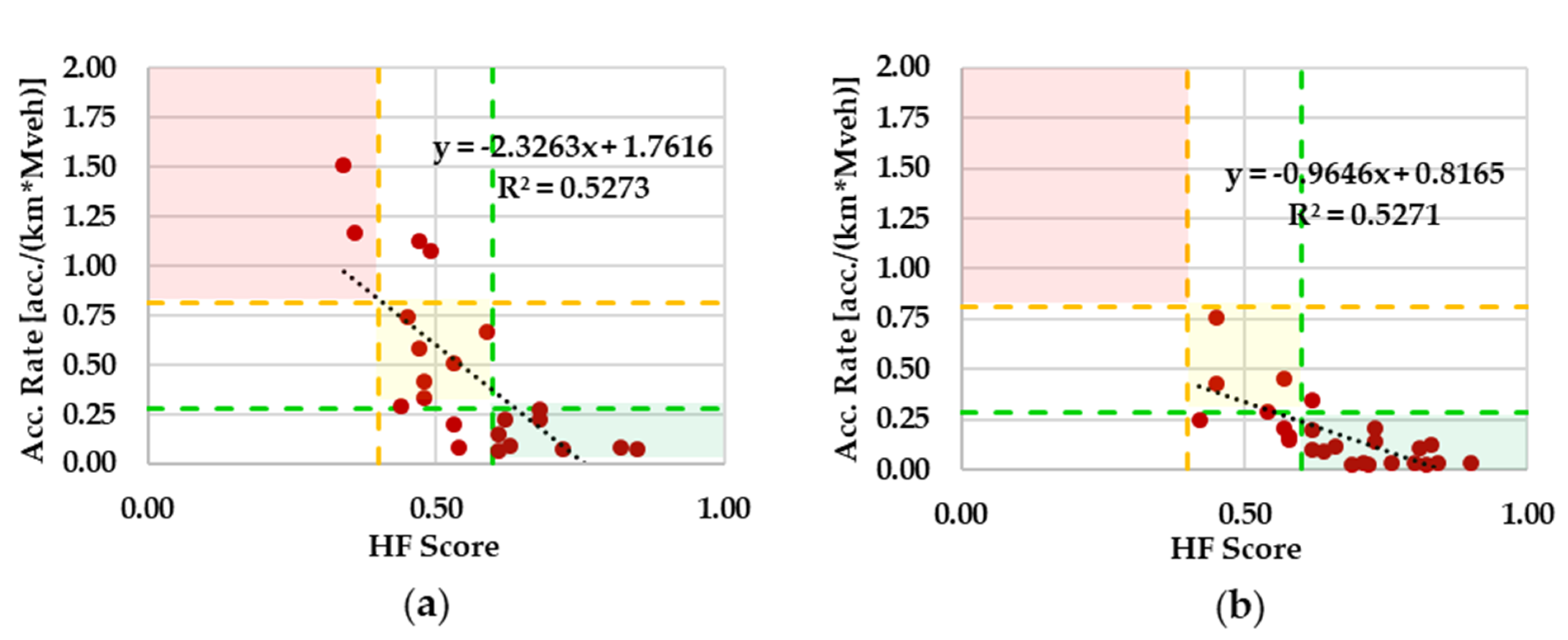
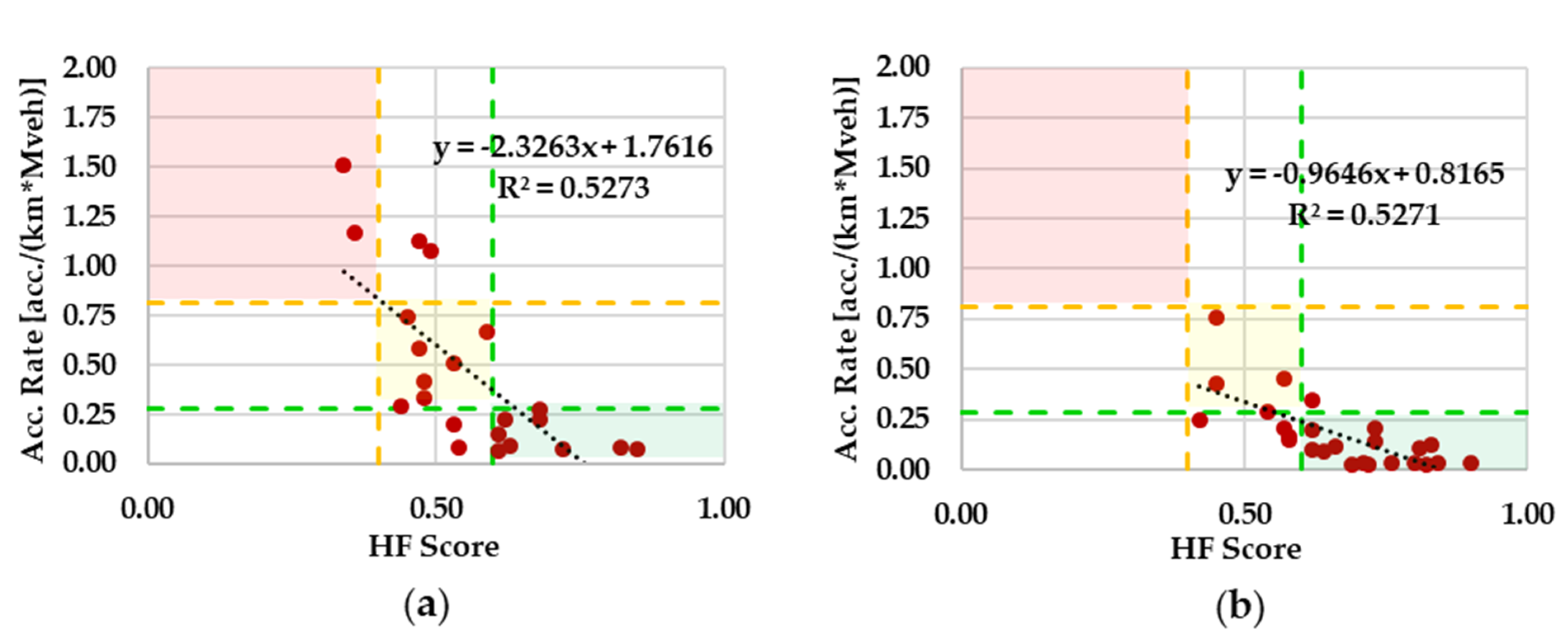
3.3.2. Quantitative Relationship between HFS and Accident Rate
4. Conclusions
- it is a proactive procedure;
- it allows for implementing of NSS, even if reliable accident databases are not available, as mainly occurs in low- and medium-income countries.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- WHO. Global Status Report on Road Safety 2018; WHO: Geneva, Switzerland, 2019. [Google Scholar]
- European Transport Safety Council. BRIEFING—EU Strategic Action Plan on Road Safety; European Transport Safety Council: Brussels, Belgium, 2019. [Google Scholar]
- European Parliament. Directive 2008/96/EC of the European Parliament and of the Council of 19 November 2008 on Road Infrastructure Safety Management. Off. J. Eur. Union 2008, 50, 59–67.
- UNECE. Road Safety Audit and Road Safety Inspection on the TEM Network; United Nations Economic Commission for Europe: Geneva, Switzerland, 2018. [Google Scholar]
- PIARC. Road Safety Manual. 20 October 2019. Available online: https://roadsafety.piarc.org/en (accessed on 5 August 2021).
- ITF. Zero Road Deaths and Serious Injuries: Leading a Paradigm Shift to a Safe System; OECD Publishing: Paris, France, 2016. [Google Scholar]
- Srinivasan, R.; Gross, F.; Lan, B.; Bahar, G. Reliability of Safety Management Methods: Network Screening; U.S. Department of Transportation—Federal Highway Administration: Washington, DC, USA, 2016.
- Ghadi, M.; Török, Á. Comparison different black spot identification methods. Transp. Res. Procedia 2017, 27, 1105–1112. [Google Scholar] [CrossRef]
- Heydari, S.; Hickford, A.; McIlory, R.; Turner, J.; Bachani, A.M. Road safety in low-income countries: State of the knowledge and future directions. Sustainability 2019, 11, 6249. [Google Scholar] [CrossRef] [Green Version]
- Yannis, G.; Dragomanovits, A.; Laiou, A.; Ritcher, T.; Ruhl, S.; Torre, F.L.; Domenichini, L.; Graham, D.; Karathodorou, N.; Li, H. Use of accident prediction models in road safety management—An international inquiry. In Proceedings of the 6th Transport Research Arena (TRA 2016), Warsaw, Poland, 18–21 April 2016. [Google Scholar]
- Greibe, P. Accidents prediction model for urban roads. Accid. Anal. Prev. 2003, 35, 273–285. [Google Scholar] [CrossRef]
- Cafiso, S.; Di Graziano, A.; Di Silvestro, G.; La Cava, G. Development of comprehensive accident models for two-lane rural highways using exposure, geometry, consistency and context variables. Accid. Anal. Prev. 2010, 42, 1072–1079. [Google Scholar] [CrossRef] [PubMed]
- Moraldi, F.; La Torre, F.; Ruhl, S. Transfer of the highway safety manual predictive method to German rural two-lane, two-way roads. J. Transp. Saf. Secur. 2020, 12, 977–996. [Google Scholar] [CrossRef]
- La Torre, F.; Meocci, M.; Nocentini, A. Safety effects of automated section speed control on the Italian motorway network. J. Saf. Res. 2019, 69, 115–123. [Google Scholar] [CrossRef]
- Montella, A.; Mauriello, F. Procedure for ranking unsignalized intersections for safety improvement. Transp. Res. Board 2012, 2318, 75–82. [Google Scholar] [CrossRef]
- Šenk, P.; Ambros, J.; Pokorný, P.; Striegler, R. Use of accident prediction models in identifying hazardous road locations. Trans. Transp. Sci. 2012, 5, 223–232. [Google Scholar] [CrossRef] [Green Version]
- American Association of State and Highways Transportation Official. HSM—Highway Safety Manual, 1st ed.; American Association of State and Highways Transportation Official: Washington, DC, USA, 2010. [Google Scholar]
- American Association of State and Highways Transportation Official. Highway Safety Manual 2014 Supplement; American Association of State and Highways Transportation Official: Washington, DC, USA, 2014. [Google Scholar]
- La Torre, F.; Domenichini, L.; Meocci, M.; Graham, D.; Karathodorou, N.; Richter, T.; Ruhl, S.; Yannis, G.; Dragomanovits, A.; Laiou, A. Development of a transnational accident prediction model. In Proceedings of the 6th Transport Research Arena (TRA 2016), Warsaw, Poland, 18–21 April 2016. [Google Scholar]
- La Torre, F.; Meocci, M.; Domenichini, L.; Branzi, V.; Tanzi, N.; Paliotto, A. Development of an accident prediction model for Italian freeways. Accid. Anal. Prev. 2019, 124, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Wan, Y.; He, W.; Zhou, J. Urban road accident black spot identification and classification approach: A novel grey verhuls–Empirical bayesian combination method. Sustainability 2021, 13, 11198. [Google Scholar] [CrossRef]
- Yuan, Q.; Xu, X.; Xu, M.; Zhao, J.; Li, Y. The role of striking and struck vehicles in side crashes between vehicles: Bayesian bivariate probit analysis in China. Accid. Anal. Prev. 2020, 134, 105324. [Google Scholar] [CrossRef] [PubMed]
- PIARC. Accidents Investigations Guidelines for Road Engineers; PIARC: Paris, France, 2013; ISBN 978-2-84060-321-4. [Google Scholar]
- Treat, J.R.; Tumbas, N.S.; McDonald, S.T.; Shinar, D.; Hume, R.D.; Mayer, R.E.; Stansifer, R.L.; Castellan, N.J. Tri-Level Study of the Causes of Traffic Crashes: Final Report—Executive Summary; Report No. DOT-HS-034-3-535-79-TAC(S); Institute for Research in Public Safety: Bloomington, IN, USA, 1979. [Google Scholar]
- National Cooperative Highway Research Program (NCHRP). Human Factors Guidelines, 2nd ed.; Transport Research Board—Report 600; National Cooperative Highway Research Program (NCHRP): Washington, DC, USA, 2012; ISBN 978-0-309-25816-6. [Google Scholar]
- Shinar, D.; Rockwell, T.; Malecki, J. The effects of changes in driver perception on rural curve negotiation. Ergonomics 1980, 23, 263–275. [Google Scholar] [CrossRef]
- Perco, P. Desirable length of spiral curves for two-lane rural roads. J. Transp. Res. Board 2006, 1961, 1–8. [Google Scholar] [CrossRef]
- McGee, H.; Moore, W.; Knapp, B.; Sanders, J. Decision Sight Distance for Highway Design and Traffic Control Requirements; (FHWA-RD-78-78); Department of Transportation: Washington, DC, USA, 1978.
- Intini, P.; Berloco, N.; Colonna, P.; Ranieri, V.; Ryeng, E. Exploring the relationships between drivers’ familiarity and two-lane rural road accidents—A multi-level study. Accid. Anal. Prev. 2018, 111, 280–296. [Google Scholar] [CrossRef]
- Yanko, M.R.; Spalek, T.N. Route familiarity breeds inattention: A driving simulator study. Accid. Anal. Prev. 2013, 57, 80–86. [Google Scholar] [CrossRef]
- Domenichini, L.; La Torre, F.; Branzi, V.; Nocentini, A. Speed behaviour in work zone crossovers—A driving simulator study. Accid. Anal. Prev. 2017, 98, 10–24. [Google Scholar] [CrossRef]
- Ben-Bassat, T.; Shinarb, D. Effect of shoulder width, guardrail and roadway geometry on driver perception and behaviour. Accid. Anal. Prev. 2011, 43, 2142–2152. [Google Scholar] [CrossRef]
- Montella, A.; Aria, M.; D’Ambrosio, A.; Galante, F.; Mauriello, F.; Pernetti, M. Simulator evaluation of drivers’ speed, deceleration and lateral position at rural intersections in relation to different perceptual cues. Accid. Anal. Prev. 2011, 43, 2072–2084. [Google Scholar] [CrossRef]
- Domenichini, L.; Branzi, V.; Meocci, M. Virtual testing of speed reduction schemes on urban collector roads. Accid. Anal. Prev. 2018, 110, 38–51. [Google Scholar] [CrossRef]
- Branzi, V.; Meocci, M.; Domenichini, L.; La Torre, F. Drivers’ performance in response to engineering treatments at pedestrian crossings. Adv. Transp. Stud. 2018, 1, 55–70. [Google Scholar] [CrossRef]
- Bassani, M.; Sacchi, E. Calibration to local conditions of geometry-based operating speed models for urban arterials and collectors. Procedia Soc. Behav. Sci. 2012, 53, 822–833. [Google Scholar] [CrossRef] [Green Version]
- Recarte, M.A.; Nunes, L.M. Mental workload while driving: Effects on visual search, discrimination, and decision making. J. Exp. Psychol. Appl. 2003, 9, 119–137. [Google Scholar] [CrossRef]
- Jovanović, D.; Šraml, M.; Matović, B.; Mićić, S. An examination of the construct and predictive validity of the self-reported speeding behavior model. Accid. Anal. Prev. 2017, 99, 66–76. [Google Scholar] [CrossRef] [PubMed]
- PIARC. Human Factors Guidelines for a Safer Man-Road Interface; PIARC Publications: Paris, France, 2016. [Google Scholar]
- RoSPA. Social Factors in Road Safety—Policy Paper; The Royal Society for the Prevention of Accidents (RoSPA): Birmingham, UK, 2012. [Google Scholar]
- González-Sánchez, G.; Olmo-Sánchez, M.I.; Maeso-González, E.; Gutiérrez-Bedmar, M.; García-Rodríguez, A. Traffic injury risk based on mobility patterns by gender, age. Sustainability 2021, 13, 10112. [Google Scholar] [CrossRef]
- Wu, Y.; Boyle, L.; McGehee, D.; Roe, C.A.; Kazutoshi, E.; James, F. Modeling types of pedal applications using a driving simulator. J. Hum. Factors Ergonom. Soc. 2015, 57, 1276–1288. [Google Scholar] [CrossRef]
- Theeuwes, J. Sampling information from the road environment. In Human Factors for Highway Engineers; Pergamon: New York, NY, USA, 2002; pp. 131–146. [Google Scholar]
- Theeuwes, J. Self-explaining roads and traffic system. In Designing Safe Road Systems: A Human Factors Perspective; CRC Press: New York, NY, USA, 2012; pp. 11–26. [Google Scholar]
- Theeuwes, J.; Godthelp, H. Self-explaining roads. Saf. Sci. 1995, 19, 217–225. [Google Scholar] [CrossRef]
- Godthelp, J. Traffic safety in emerging countries: Making roads self-explaining through intelligent support systems. In Proceedings of the 26th World Road Congress, Abu Dhabi, United Arab Emirates, 6–10 October 2019. [Google Scholar]
- Theeuwes, J. Self-explaining roads: What does visual cognition tell us about designing safer roads? Cogn. Res. Princ. Implic. 2021, 6, 15. [Google Scholar] [CrossRef]
- Qin, Y.; Chen, Y.; Lin, K. Quantifying the effects of visual road information on drivers’ speed choices to promote self-explaining roads. Int. J. Environ. Res. Public Health 2020, 17, 2437. [Google Scholar] [CrossRef] [Green Version]
- Köhler, W. Evoluzione e Compiti della Psicologia della Forma; Armando Editore: Rome, Italy, 2008; p. 25. ISBN 978-88-6081-356-5. [Google Scholar]
- Birth, S. Human factors design features supporting space perception. In Proceedings of the 4th International Conference on Safer Road Infrastructure, Prague, Czech Republic, 14–17 April 2009. [Google Scholar]
- Birth, S.; Demgensky, B.; Aubin, D. Space Perception and Road Design for Vulnerable Road User; PIARC: Paris, France, 2009. [Google Scholar]
- Birth, S.; Staadt, H.; Sporbeck, O. Guideline for Optical Orientation by Planting, (HVO); Ministry of Infrastructure and Regional Development: Postdam, Germany, 2002.
- Čičković, M. Influence of human behaviour on geometric road design. In Proceedings of the 6th Transport Research Arena (TRA 2016), Warsaw, Poland, 18–21 April 2016; pp. 4364–4373. [Google Scholar]
- Birth, S.; Demgensky, B.; Sieber, G. Relationship between Human Factors and the Likelihood of Single-Vehicle Crashes on Dutch Motorways; Report for Rijkswaterstaat Dienst Verkeer en Scheepvaart; PIARC: Delft, The Netherlands, 2015. [Google Scholar]
- Birth, S.; Demgensky, B. Investigation of Human Factors Accident Triggers on Rural Roads in Brandeburg, Germany; Ministry of Infrastructure and Regional Development: Postdam, Germany, 2017.
- PIARC. Road Safety Evaluation Based on Human Factors Method; World Road Association; PIARC: Paris, France, 2018. [Google Scholar]
- Birth, S.; Pflaumbaum, M. Human factors in road design: A way to self-explaining roads; Validation of the IST-Checklist 2005, Project Report of Work Package 3: Expert assistance for safety review of rural and urban roads (single carriageway roads). In Ranking for European Road Safety (RANKERS) Research Project Funded under the 6th Framework Program of the European Community; European Commission: Brussels, Belgium, 2006. [Google Scholar]
- Birth, S.; Demgensky, B.; Sieber, G. Human Factors Evaluation Tool; Intelligenz System Transfer GmbH: Postdam, Germany, 2017. [Google Scholar]
- Martinelli, F.; La Torre, F.; Vadi, P. Calibration of the Highway Safety Manual’s Accident Prediction Model for Italian Secondary Road Network. J. Transp. Res. Board 2009, 2103, 1–9. [Google Scholar] [CrossRef]
- Regione Toscana. Analisi di Incidentalità delle Strade Regionali; Centro di Monitoraggio Regionale—Direzione Politiche Mobilità, Infrastrutture e TPL—Settore Programmazione Viabilità: Florence, Italy, 2019. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road | Analyzed Segment Length [km] | Mean Average AADT 1 [Veh/Days] | Max Average AADT 1 [Veh/Days] | Min Average AADT 1 [Veh/Days] | Total Accidents | Fatal Accidents | Injury Accidents |
|---|---|---|---|---|---|---|---|
| SR2 | 10.41 | 6469 | 12,395 | 4247 | 83 | 1 | 82 |
| SR206 | 12.75 | 12,931 | 15,335 | 11,799 | 78 | 1 | 77 |
| Type | Maximum Length [m] | Minimum Length [m] | Average Length [m] |
|---|---|---|---|
| Roadway Segments (rural) | 908 | 200 | 490 |
| Intersections (rural) | 903 | 190 | 498 |
| Urban Segments | 707 | 296 | 599 |
| SR2 | ||
|---|---|---|
| Section ID | Length [km] | Section Type |
| 281_6 | 0.60 | Roadway Segment |
| 282_2 | 0.50 | Intersections |
| 282_7 | 0.20 | Roadway Segment |
| 282_9 | 0.68 | Intersections |
| 283_6 | 0.29 | Roadway Segment |
| 283_9 | 0.20 | Intersections |
| 284_1 | 0.22 | Roadway Segment |
| 284_3 | 0.22 | Intersections |
| 284_6 | 0.43 | Roadway Segment |
| 285_1 | 0.50 | Intersections |
| 285_6 | 0.91 | Roadway Segment |
| 286_5 | 0.51 | Intersections |
| 287_0 | 0.81 | Roadway Segment |
| 287_8 | 0.80 | Intersections |
| 288_6 | 0.40 | Roadway Segment |
| 289_0 | 0.20 | Intersections |
| 289_2 | 0.70 | Urban Segment |
| 289_9 | 0.60 | Urban Segment |
| 290_5 | 0.50 | Urban Segment |
| 291_0 | 0.55 | Intersections |
| 291_7 | 0.30 | Urban Segment |
| 292_0 | 0.35 | Intersections |
| SR206 | ||
| Section ID | Length [km] | Section Type |
| 029_6 | 0.60 | Intersections |
| 030_2 | 0.50 | Roadway Segment |
| 030_7 | 0.40 | Intersections |
| 031_1 | 0.30 | Roadway Segment |
| 031_4 | 0.70 | Urban Segment |
| 032_1 | 0.71 | Urban Segment |
| 032_8 | 0.58 | Urban Segment |
| 033_4 | 0.19 | Intersections |
| 033_6 | 0.58 | Roadway Segment |
| 034_2 | 0.39 | Intersections |
| 034_6 | 0.39 | Roadway Segment |
| 035_0 | 0.90 | Intersections |
| 035_9 | 0.49 | Roadway Segment |
| 036_4 | 0.69 | Intersections |
| 036_9 | 0.49 | Intersections |
| 037_4 | 0.69 | Roadway Segment |
| 038_1 | 0.30 | Intersections |
| 038_4 | 0.70 | Urban Segment |
| 039_1 | 0.30 | Roadway Segment |
| 039_4 | 0.40 | Intersections |
| 039_8 | 0.30 | Roadway Segment |
| 040_1 | 0.60 | Intersections |
| 040_7 | 0.50 | Intersections |
| 041_2 | 0.20 | Roadway Segment |
| 041_4 | 0.82 | Intersections |
| Characteristics | Rural | Urban |
|---|---|---|
| Horizontal element start location | X | X |
| Horizontal element end location | X | X |
| Curve radius | X | X |
| Curve direction | X | X |
| Curve side of the road | X | X |
| Vertical element start location | X | X |
| Vertical element end location | X | X |
| Grade | X | X |
| Lane width | X | X |
| Overtaking maneuver allowed | X | X |
| Shoulder width | X | X |
| Shoulder type | X | X |
| Design speed | X | |
| Driveway density | X | |
| Roadside hazard rating | X | |
| Lighting | X | X |
| Automated speed enforcement | X | X |
| Presence of centerline rumble strip | X | |
| Presence of median | X | |
| Presence of median barrier | X | |
| Posted speed | X | |
| Speed category | X | |
| Number of driveways | X | |
| Type of driveway | X | |
| Presence of rail highway crossing | X | |
| On-street parking | X |
| Acc. Frequency [Acc./Years] | Acc. Rate [Acc./(Years*km*Mvehicles)] | |||||
|---|---|---|---|---|---|---|
| Segment Type | Tmean | T80 | T90 | Tmean | T80 | T90 |
| Roadway | 0.16 | 0.20 | 0.40 | 0.16 | 0.28 | 0.46 |
| Intersections | 0.30 | 0.40 | 0.80 | 0.30 | 0.53 | 0.88 |
| Urban | 1.25 | 2.20 | 3.20 | 0.50 | 0.82 | 1.09 |
| Total | 0.44 | 0.60 | 1.20 | 0.28 | 0.48 | 0.81 |
| Testing Groups | Samples | |||||
|---|---|---|---|---|---|---|
| Total (n) | Road | Homogeneous Segment Type | ||||
| SR2 | SR206 | Roadway | Intersections | Urban | ||
| TG1 | 47 | 22 | 25 | 17 | 22 | 8 |
| TG2 | 22 | 22 | - | 8 | 10 | 4 |
| 25 | - | 25 | 9 | 12 | 4 | |
| TG3 | 17 | 8 | 9 | 17 | - | - |
| 22 | 10 | 12 | - | 22 | - | |
| 8 | 4 | 4 | - | - | 8 | |
| SR 2 | SR206 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 |
| H.S. Name | HFS I Rule | HFS II Rule | HFS III Rule | HFS Total | H.S. Name | HFS I Rule | HFS II Rule | HFS III Rule | HFS Total |
| 281_6 | 30% | 41% | 71% | 48% | 029_6 | 64% | 76% | 76% | 73% |
| 282_2 | 38% | 68% | 65% | 59% | 030_2 | 57% | 81% | 77% | 73% |
| 282_7 | 80% | 79% | 90% | 82% | 030_7 | 75% | 82% | 87% | 83% |
| 282_9 | 15% | 39% | 44% | 36% | 031_1 | 50% | 82% | 73% | 71% |
| 283_6 | 30% | 71% | 72% | 67% | 031_4 | 50% | 67% | 52% | 57% |
| 283_9 | 25% | 55% | 47% | 47% | 032_1 | 40% | 56% | 41% | 45% |
| 284_1 | 80% | 84% | 89% | 85% | 032_8 | 44% | 65% | 65% | 58% |
| 284_3 | 56% | 71% | 81% | 72% | 033_4 | 58% | 90% | 72% | 76% |
| 284_6 | 50% | 67% | 79% | 68% | 033_6 | 40% | 87% | 79% | 72% |
| 285_1 | 54% | 41% | 72% | 53% | 034_2 | 77% | 88% | 75% | 80% |
| 285_6 | 31% | 54% | 52% | 48% | 034_6 | 100% | 89% | 78% | 90% |
| 286_5 | 54% | 58% | 68% | 61% | 035_0 | 24% | 52% | 44% | 42% |
| 287_0 | 44% | 60% | 74% | 61% | 035_9 | 40% | 68% | 75% | 62% |
| 287_8 | 15% | 67% | 50% | 48% | 036_4 | 50% | 69% | 63% | 62% |
| 288_6 | 15% | 71% | 61% | 54% | 036_9 | 40% | 72% | 50% | 57% |
| 289_0 | 40% | 83% | 65% | 68% | 037_4 | 40% | 63% | 75% | 62% |
| 289_2 | 31% | 58% | 38% | 44% | 038_1 | 40% | 65% | 80% | 64% |
| 289_9 | 33% | 63% | 59% | 53% | 038_4 | 33% | 72% | 57% | 58% |
| 290_5 | 38% | 79% | 61% | 62% | 039_1 | 100% | 73% | 90% | 81% |
| 291_0 | 19% | 42% | 39% | 34% | 039_4 | 60% | 63% | 81% | 69% |
| 291_7 | 38% | 47% | 52% | 47% | 039_8 | 100% | 73% | 90% | 82% |
| 292_0 | 15% | 50% | 57% | 45% | 040_1 | 40% | 50% | 43% | 45% |
| 040_7 | 44% | 64% | 80% | 66% | |||||
| 041_2 | 90% | 80% | 87% | 84% | |||||
| 041_4 | 38% | 64% | 55% | 54% | |||||
| First HF Rule | Second HF Rule | Third HF Rule | All HF Rules | |
|---|---|---|---|---|
| Total HSs | 48% | 67% | 67% | 62% |
| SR2 | 40% | 62% | 64% | 58% |
| SR206 | 56% | 72% | 70% | 67% |
| Roadway | 58% | 72% | 78% | 70% |
| Intersection | 44% | 65% | 65% | 60% |
| Urban | 39% | 63% | 53% | 53% |
| Road | HS Name | Acc. Frequency [Acc./y] | Acc. Rate [Acc./(km*Mveh)] | # Acc. Frequency | # Acc. Rate |
|---|---|---|---|---|---|
| SR2 | 291_0 | 3.75 | 1.51 | 1 | 1 |
| SR2 | 282_9 | 1.23 | 1.17 | 7 | 2 |
| SR2 | 283_9 | 0.35 | 1.13 | 24 | 3 |
| SR2 | 281_6 | 1.00 | 1.08 | 9 | 4 |
| SR206 | 032_1 | 2.30 | 0.76 | 2 | 5 |
| SR2 | 292_0 | 1.19 | 0.74 | 8 | 6 |
| SR2 | 282_2 | 0.52 | 0.66 | 17 | 7 |
| SR2 | 291_7 | 0.79 | 0.59 | 12 | 8 |
| SR2 | 289_9 | 1.39 | 0.51 | 4 | 9 |
| SR206 | 031_4 | 1.35 | 0.45 | 5 | 10 |
| SR206 | 040_1 | 1.43 | 0.43 | 3 | 11 |
| SR2 | 285_6 | 0.59 | 0.42 | 15 | 12 |
| SR206 | 035_9 | 0.73 | 0.34 | 13 | 13 |
| SR2 | 287_8 | 0.41 | 0.33 | 21 | 14 |
| SR2 | 289_2 | 0.93 | 0.29 | 11 | 15 |
| SR206 | 041_4 | 1.34 | 0.29 | 6 | 16 |
| SR2 | 289_0 | 0.08 | 0.27 | 33 | 17 |
| SR206 | 035_0 | 0.97 | 0.25 | 10 | 18 |
| SR2 | 284_6 | 0.15 | 0.22 | 30 | 19 |
| SR2 | 290_5 | 0.50 | 0.22 | 18 | 20 |
| SR206 | 030_2 | 0.45 | 0.21 | 19 | 21 |
| SR206 | 036_9 | 0.44 | 0.21 | 20 | 22 |
| SR2 | 285_1 | 0.15 | 0.19 | 29 | 23 |
| SR206 | 037_4 | 0.57 | 0.19 | 16 | 24 |
| SR206 | 038_4 | 0.65 | 0.17 | 14 | 25 |
| SR206 | 032_8 | 0.37 | 0.15 | 22 | 26 |
| SR2 | 286_5 | 0.11 | 0.14 | 32 | 27 |
| SR206 | 029_6 | 0.36 | 0.14 | 23 | 28 |
| SR206 | 030_7 | 0.21 | 0.12 | 27 | 29 |
| SR206 | 040_7 | 0.33 | 0.12 | 25 | 30 |
| SR206 | 039_1 | 0.18 | 0.10 | 28 | 31 |
| SR206 | 036_4 | 0.30 | 0.10 | 26 | 32 |
| SR2 | 283_6 | 0.04 | 0.09 | 41 | 33 |
| SR206 | 038_1 | 0.12 | 0.09 | 31 | 34 |
| SR2 | 288_6 | 0.05 | 0.08 | 39 | 35 |
| SR2 | 282_7 | 0.02 | 0.08 | 47 | 36 |
| SR2 | 284_3 | 0.03 | 0.07 | 45 | 37 |
| SR2 | 284_1 | 0.02 | 0.07 | 46 | 38 |
| SR2 | 287_0 | 0.08 | 0.06 | 34 | 39 |
| SR206 | 033_4 | 0.03 | 0.04 | 44 | 40 |
| SR206 | 041_2 | 0.04 | 0.03 | 43 | 41 |
| SR206 | 031_1 | 0.04 | 0.03 | 42 | 42 |
| SR206 | 034_2 | 0.05 | 0.03 | 37 | 43 |
| SR206 | 034_6 | 0.05 | 0.03 | 38 | 44 |
| SR206 | 033_6 | 0.07 | 0.03 | 35 | 45 |
| SR206 | 039_8 | 0.04 | 0.03 | 40 | 46 |
| SR206 | 039_4 | 0.06 | 0.03 | 36 | 47 |
| SR2 | SR206 | ||||
|---|---|---|---|---|---|
| HS ID | Acc. Rate | HFS | HS ID | Acc. Rate | HFS |
| 291_0 | 1 | 1 | 035_0 | 18 | 3 |
| 282_9 | 2 | 2 | 032_1 | 5 | 6 |
| 289_2 | 15 | 4 | 040_1 | 11 | 7 |
| 292_0 | 6 | 5 | 041_4 | 16 | 15 |
| 283_9 | 3 | 8 | 031_4 | 10 | 18 |
| 291_7 | 8 | 9 | 036_9 | 22 | 17 |
| 285_6 | 12 | 10 | 038_4 | 25 | 19 |
| 287_8 | 14 | 11 | 032_8 | 26 | 20 |
| 281_6 | 4 | 12 | 035_9 | 13 | 24 |
| 289_9 | 9 | 13 | 037_4 | 24 | 25 |
| 285_1 | 23 | 14 | 036_4 | 32 | 27 |
| 288_6 | 35 | 16 | 038_1 | 34 | 29 |
| 282_2 | 7 | 21 | 040_7 | 30 | 30 |
| 286_5 | 27 | 22 | 039_4 | 47 | 33 |
| 287_0 | 39 | 23 | 031_1 | 42 | 34 |
| 290_5 | 20 | 26 | 033_6 | 45 | 36 |
| 283_6 | 33 | 28 | 030_2 | 21 | 37 |
| 289_0 | 17 | 31 | 029_6 | 28 | 38 |
| 284_6 | 19 | 32 | 033_4 | 40 | 39 |
| 284_3 | 37 | 35 | 034_2 | 43 | 40 |
| 282_7 | 36 | 42 | 039_1 | 31 | 41 |
| 284_1 | 38 | 46 | 039_8 | 46 | 43 |
| 030_7 | 29 | 44 | |||
| 041_2 | 41 | 45 | |||
| 034_6 | 44 | 47 | |||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|
| Testing Groups | Statistic Results | |||||
| Correlation Coefficients | α | F-Test Parameters | ||||
| r | R2 | F1, n−2, α/2 | F | |||
| TG1 | Total | −0.719 | 0.517 | 5% | 2.69 | 6.94 |
| TG2 | SR2 | −0.726 | 0.527 | 5% | 2.09 | 4.72 |
| SR206 | −0.726 | 0.527 | 5% | 0.53 | 5.06 | |
| TG3 | Roadway Segments | −0.622 | 0.387 | 5% | 2.13 | 3.08 |
| Intersections | −0.756 | 0.571 | 5% | 2.05 | 5.16 | |
| Urban Segments | −0.651 | 0.424 | 5% | 2.45 | 2.10 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Domenichini, L.; Paliotto, A.; Meocci, M.; Branzi, V. Application and Evaluation of a Non-Accident-Based Approach to Road Safety Analysis Based on Infrastructure-Related Human Factors. Sustainability 2022, 14, 662. https://doi.org/10.3390/su14020662
Domenichini L, Paliotto A, Meocci M, Branzi V. Application and Evaluation of a Non-Accident-Based Approach to Road Safety Analysis Based on Infrastructure-Related Human Factors. Sustainability. 2022; 14(2):662. https://doi.org/10.3390/su14020662
Chicago/Turabian StyleDomenichini, Lorenzo, Andrea Paliotto, Monica Meocci, and Valentina Branzi. 2022. "Application and Evaluation of a Non-Accident-Based Approach to Road Safety Analysis Based on Infrastructure-Related Human Factors" Sustainability 14, no. 2: 662. https://doi.org/10.3390/su14020662
APA StyleDomenichini, L., Paliotto, A., Meocci, M., & Branzi, V. (2022). Application and Evaluation of a Non-Accident-Based Approach to Road Safety Analysis Based on Infrastructure-Related Human Factors. Sustainability, 14(2), 662. https://doi.org/10.3390/su14020662