
Power System Stability Improvement of FACTS Controller and PSS Design: A Time-Delay Approach



Abstract
:1. Introduction
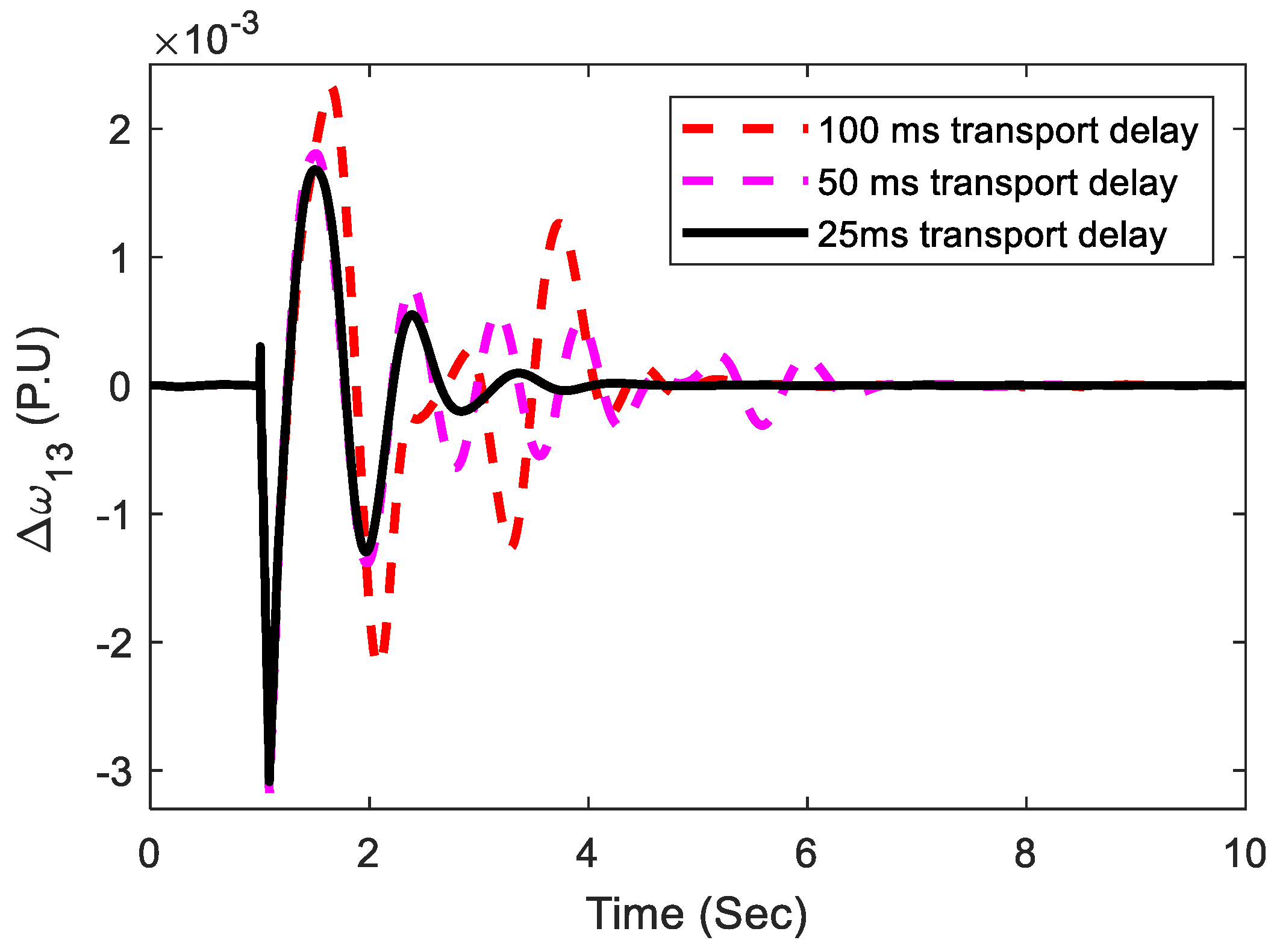
- This paper investigates the simultaneous tuning of the PSS and FACTS controller considering the potential time delays. Its goal is to improve power system stability in the presence of potential time delay.
- GOA is utilized to fine-tune control parameters for the proposed fuzzy lead-lag controller design. To illustrate the robustness of the proposed design methodology, simulation results for both single-machine infinite-bus and multi-machine power systems are presented under different disturbances and faults.
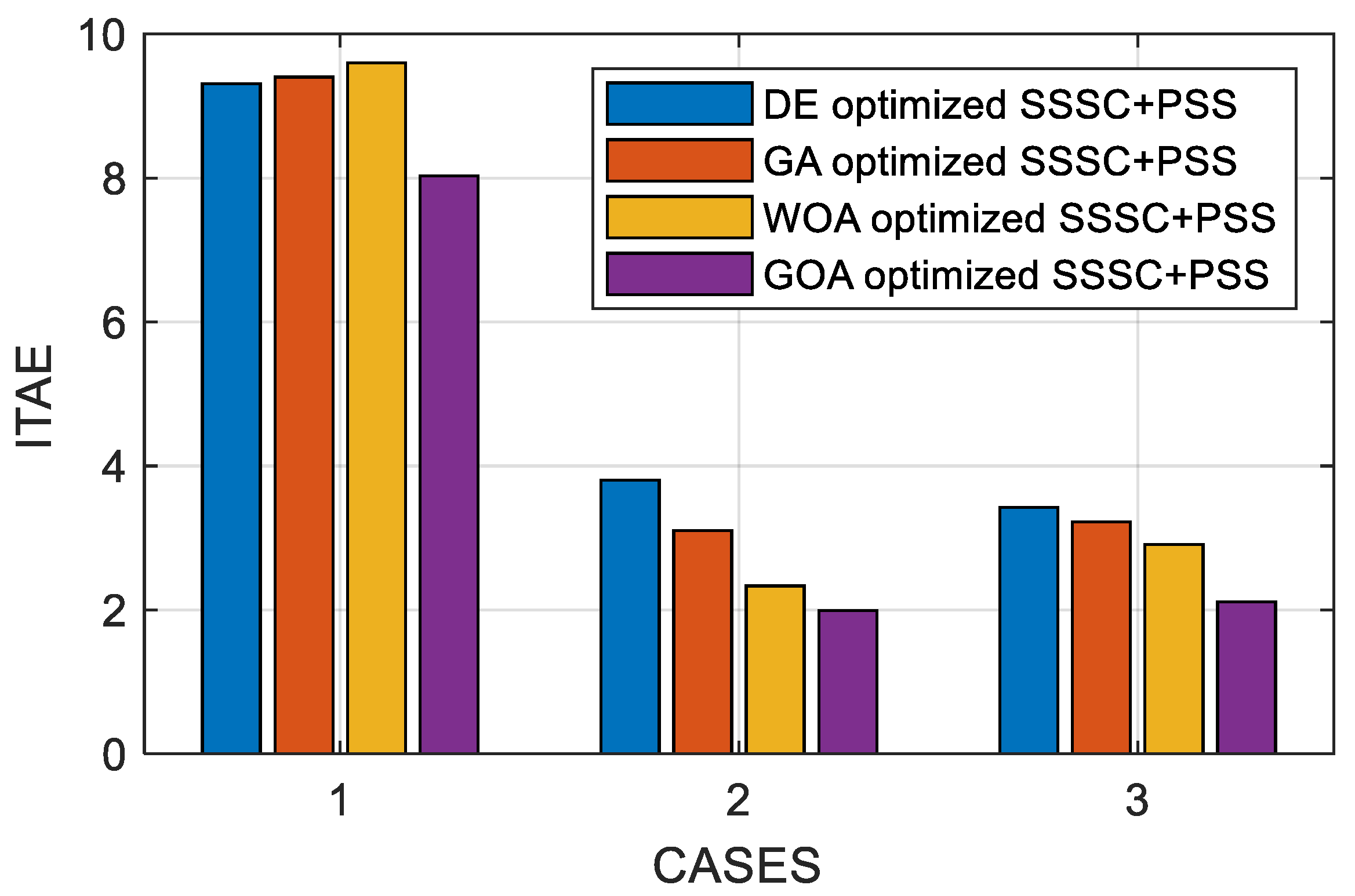
- The percentage decrease in J value with the GOA technique compared with the recently published WOA, well-established GA, and DE are 16.32%, 14.56%, and 13.72%, respectively, in the SMIB system. The percentage decrease in J value with the proposed GOA technique compared with the recently published WOA, well-established GA, and DE are 1.41%, 9.98%, and 13.31%, respectively, for a multi-machine system.
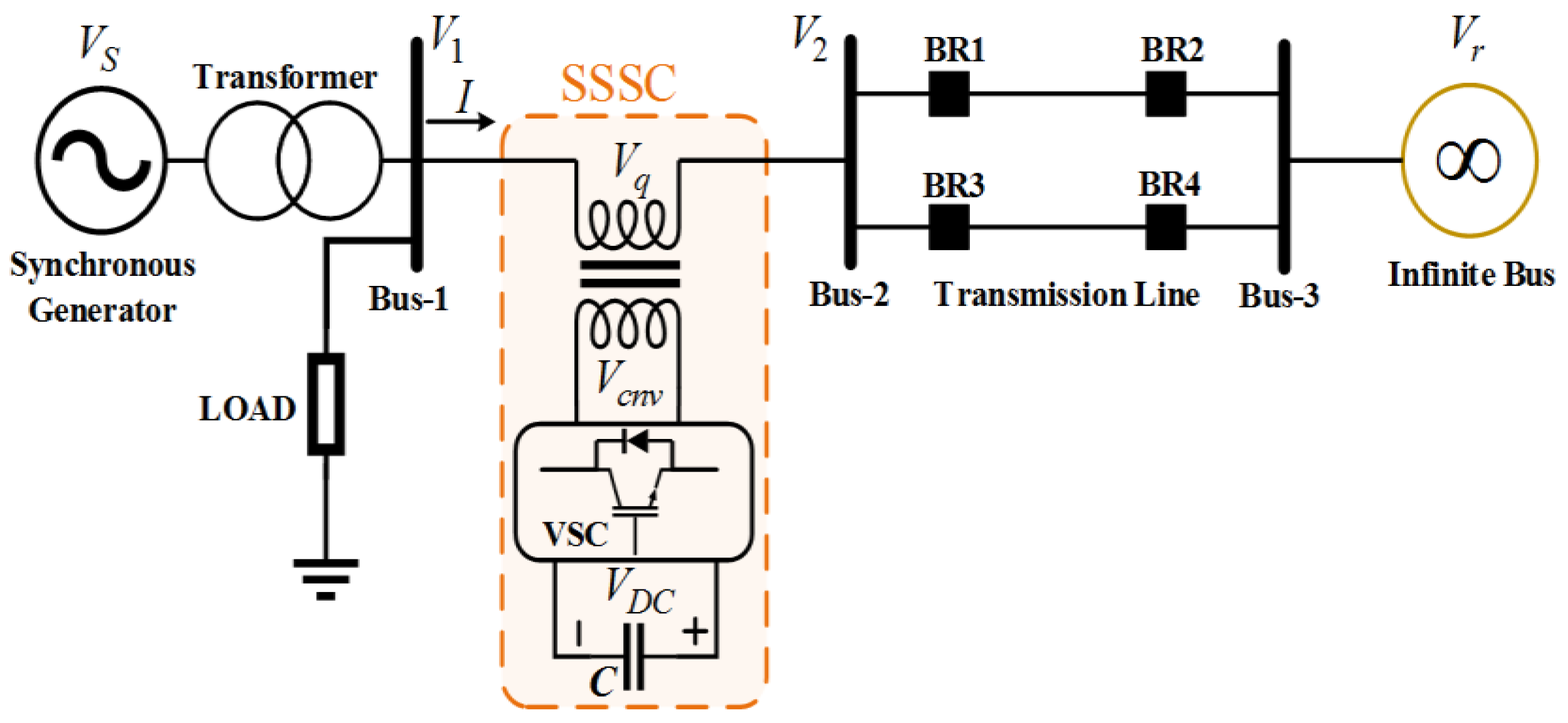
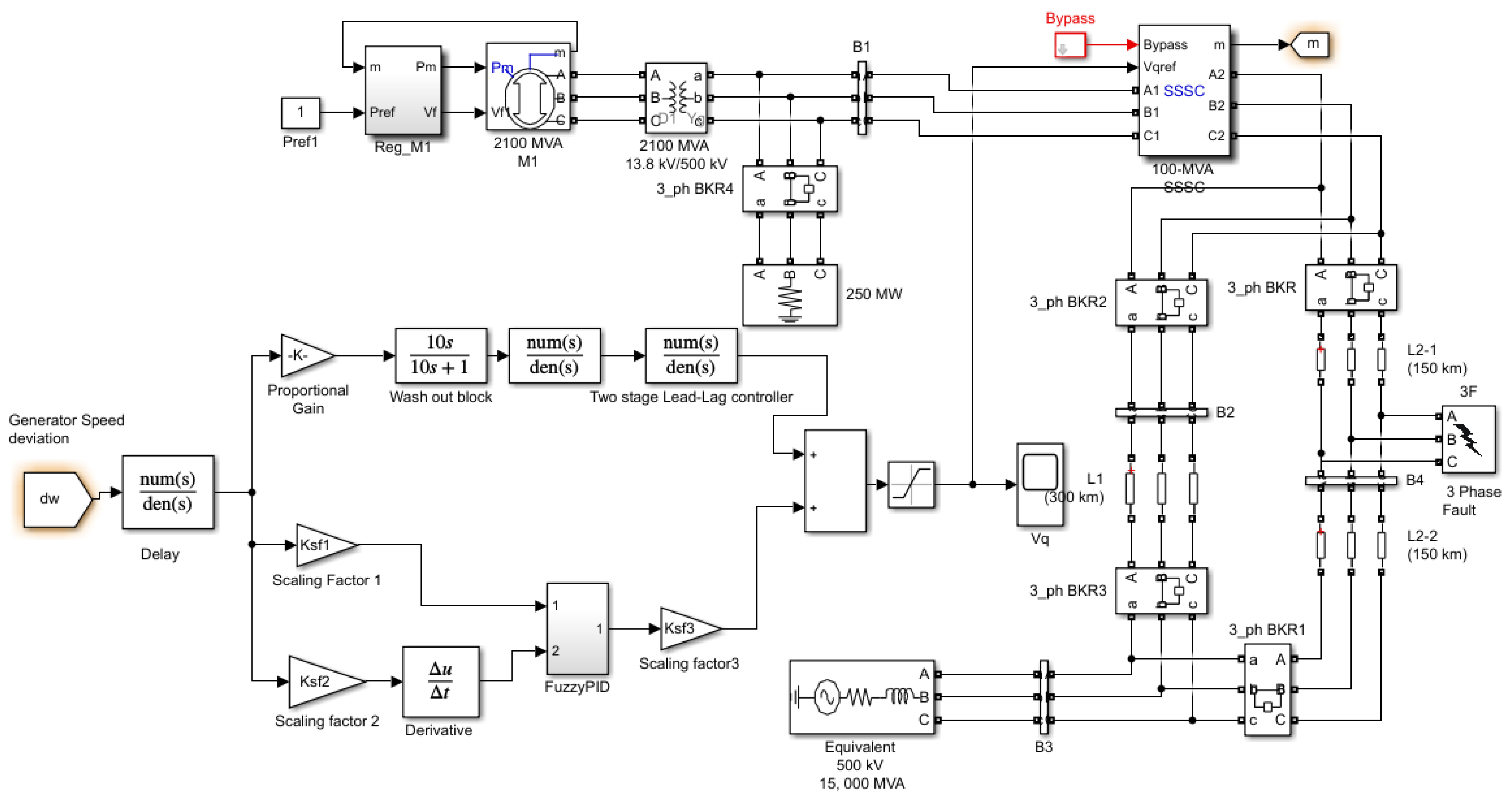
2. System Modeling
Model of SSSC
3. The Proposed Approach
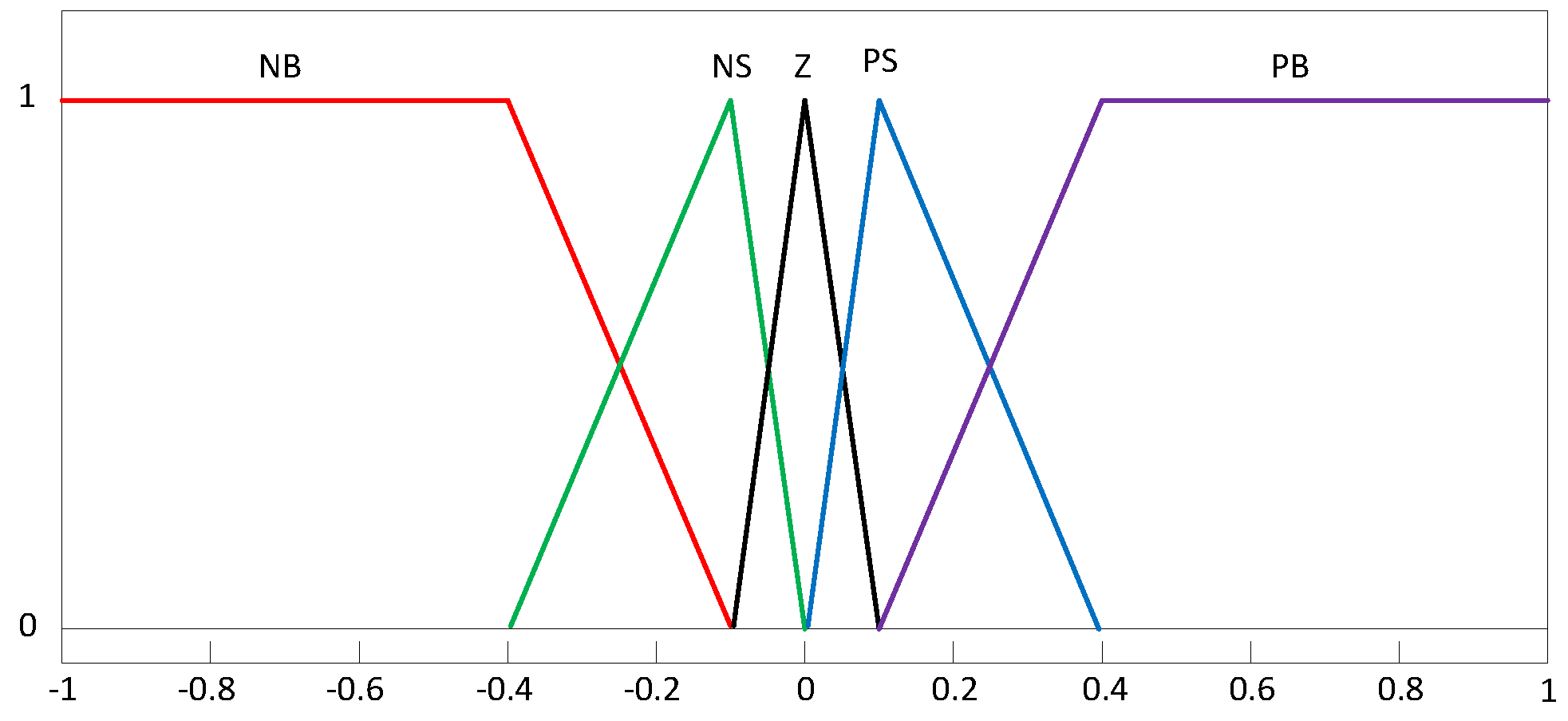
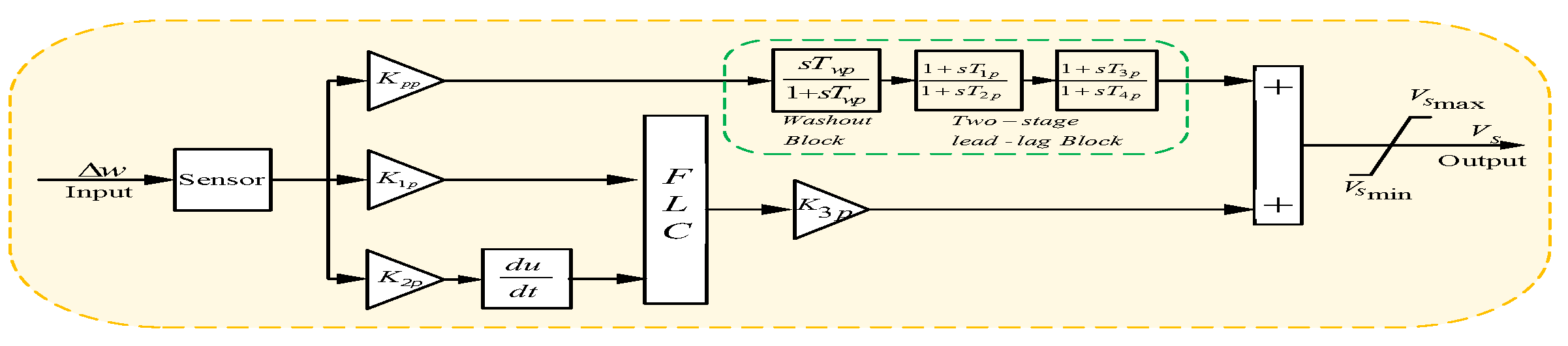
3.1. Proposed Fuzzy Structured FACTS Controller Structure with PSS
3.2. Optimization Problem
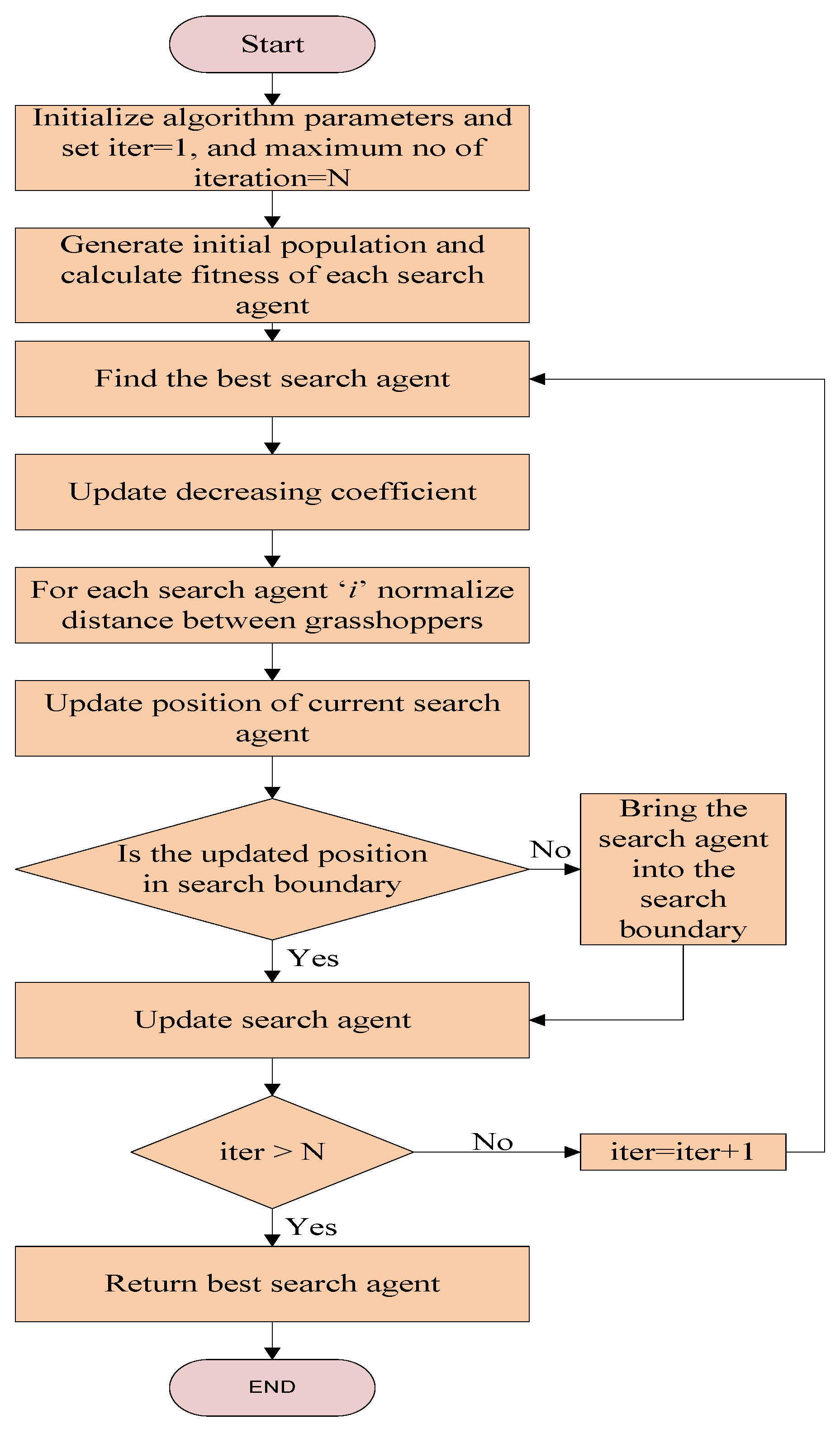
4. GOA Method
Overview of GOA
5. Results and Discussion
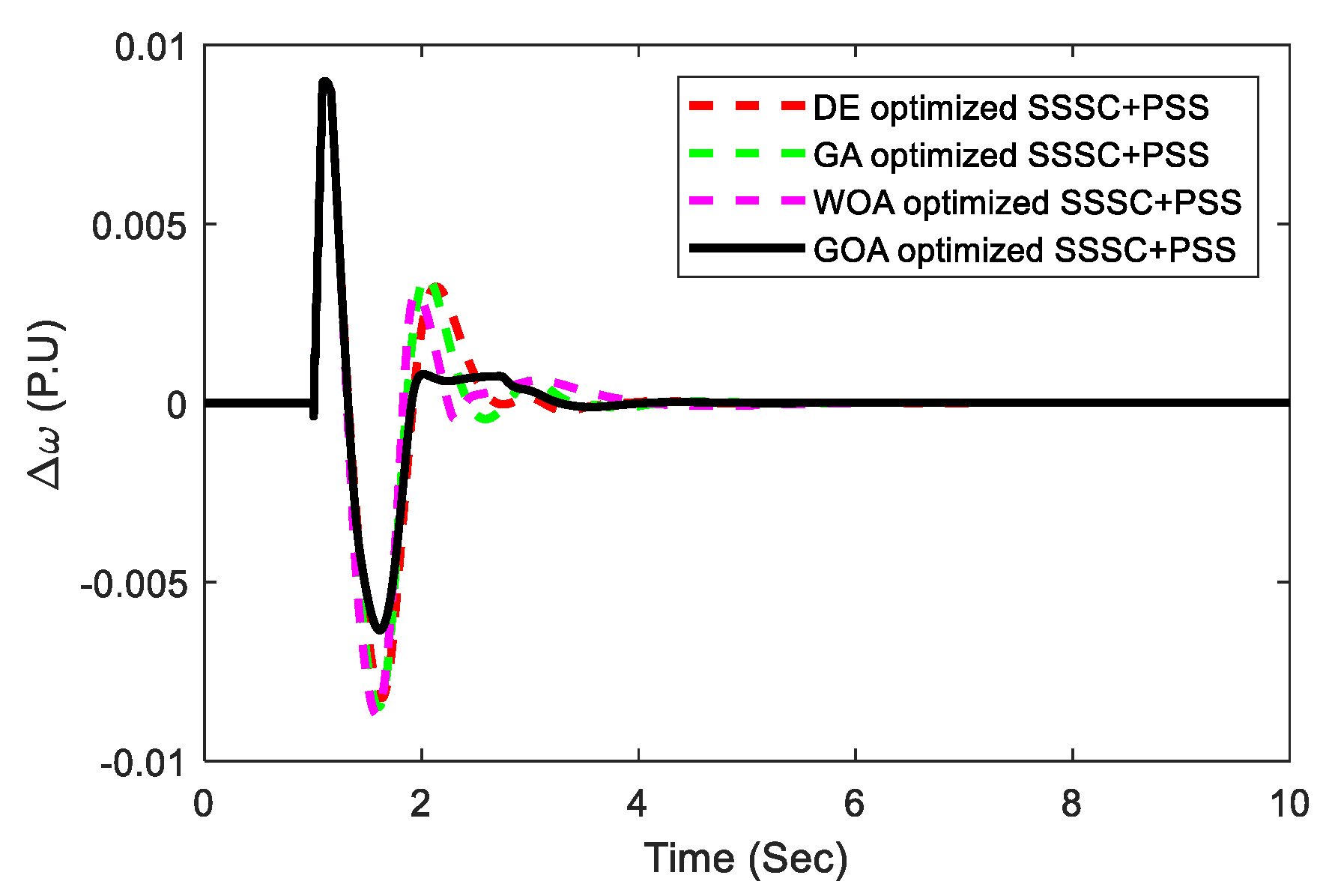
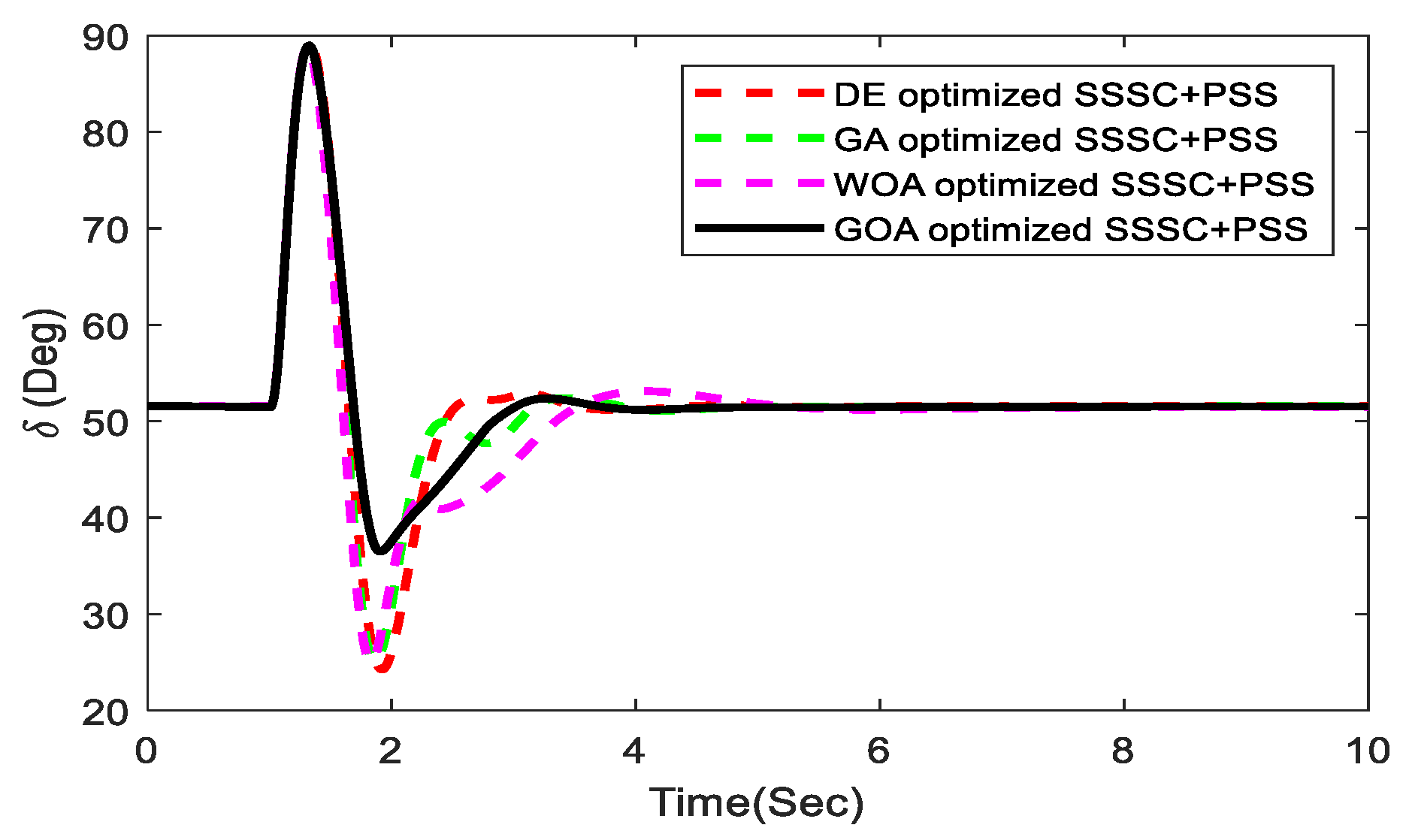
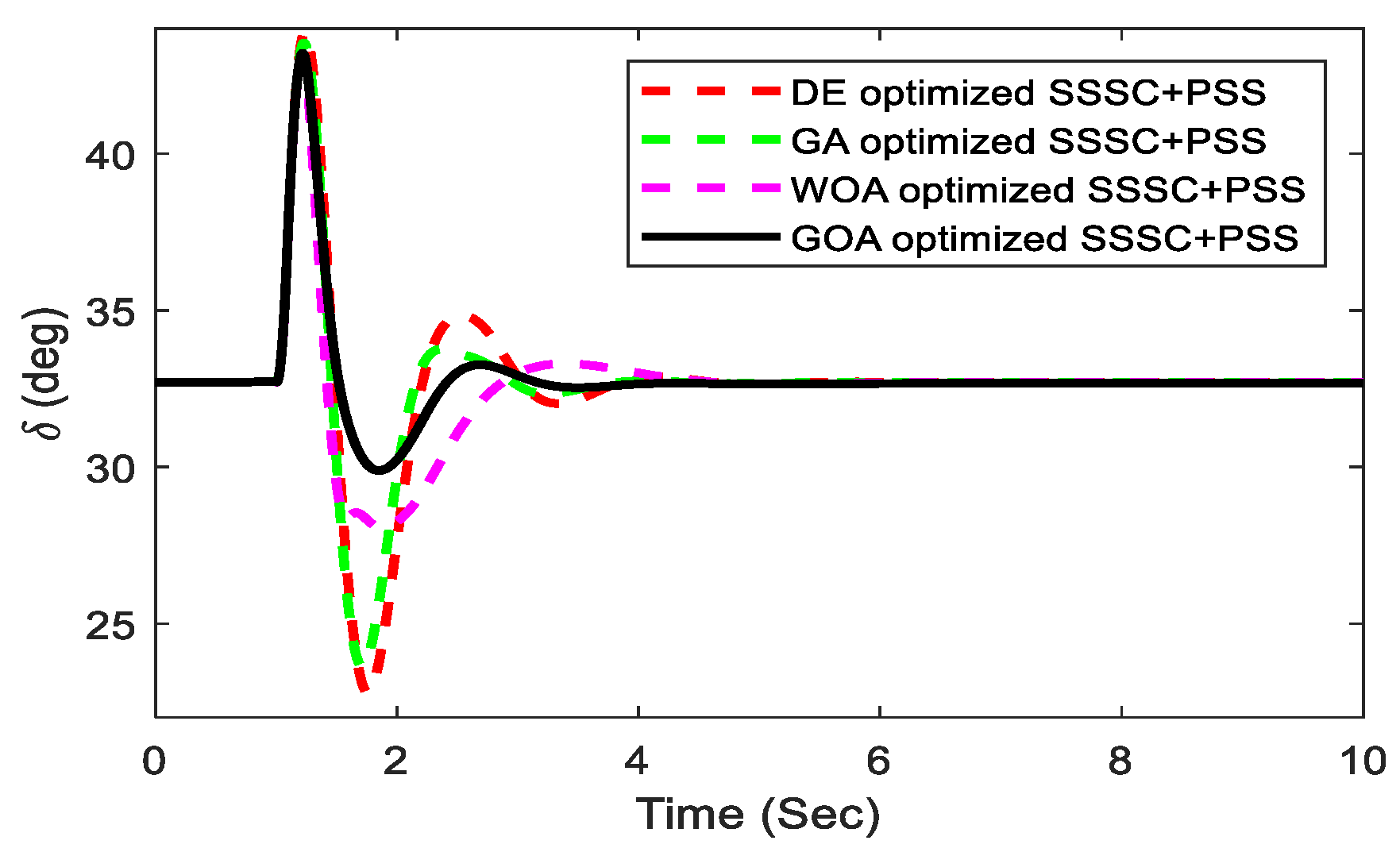
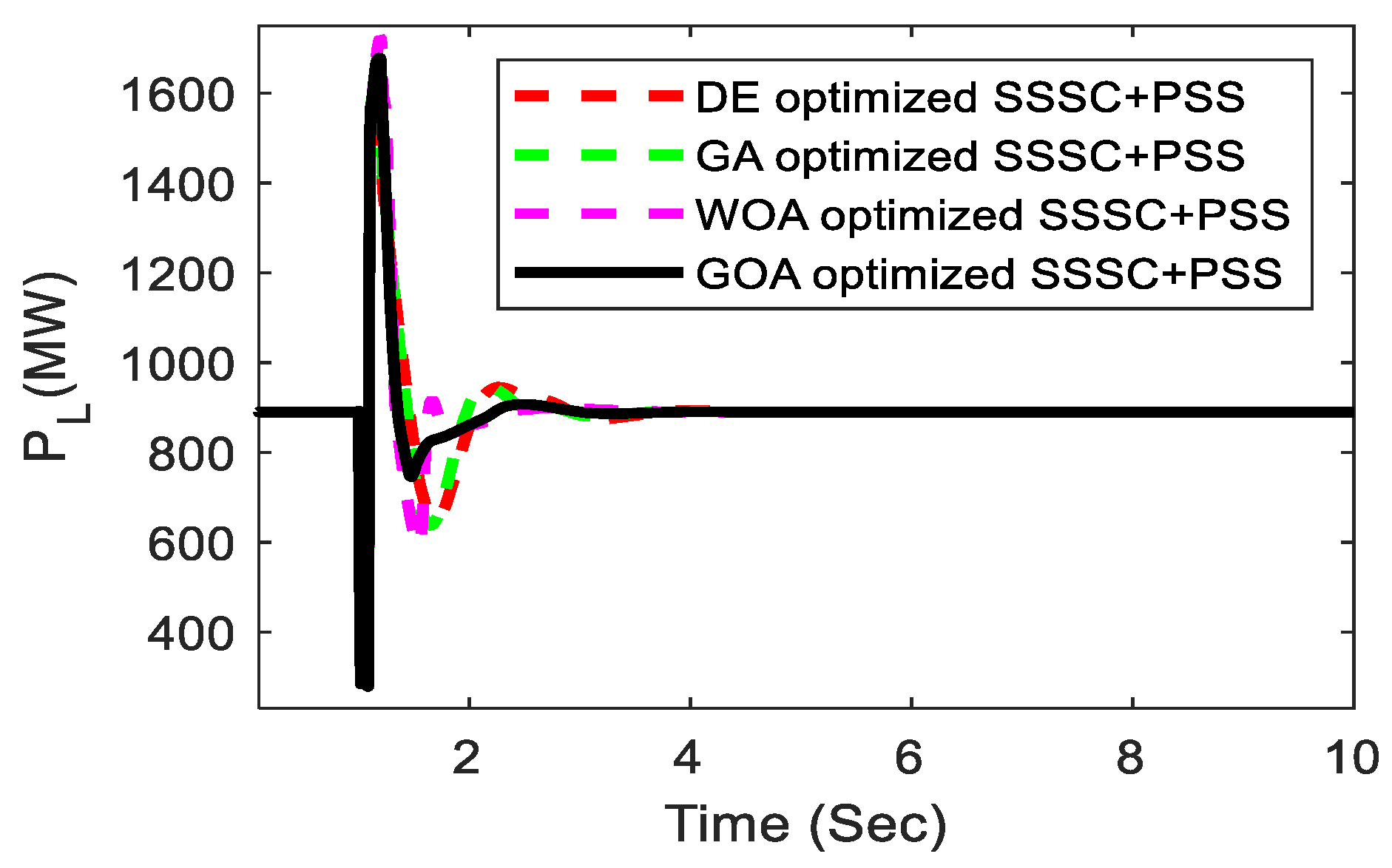
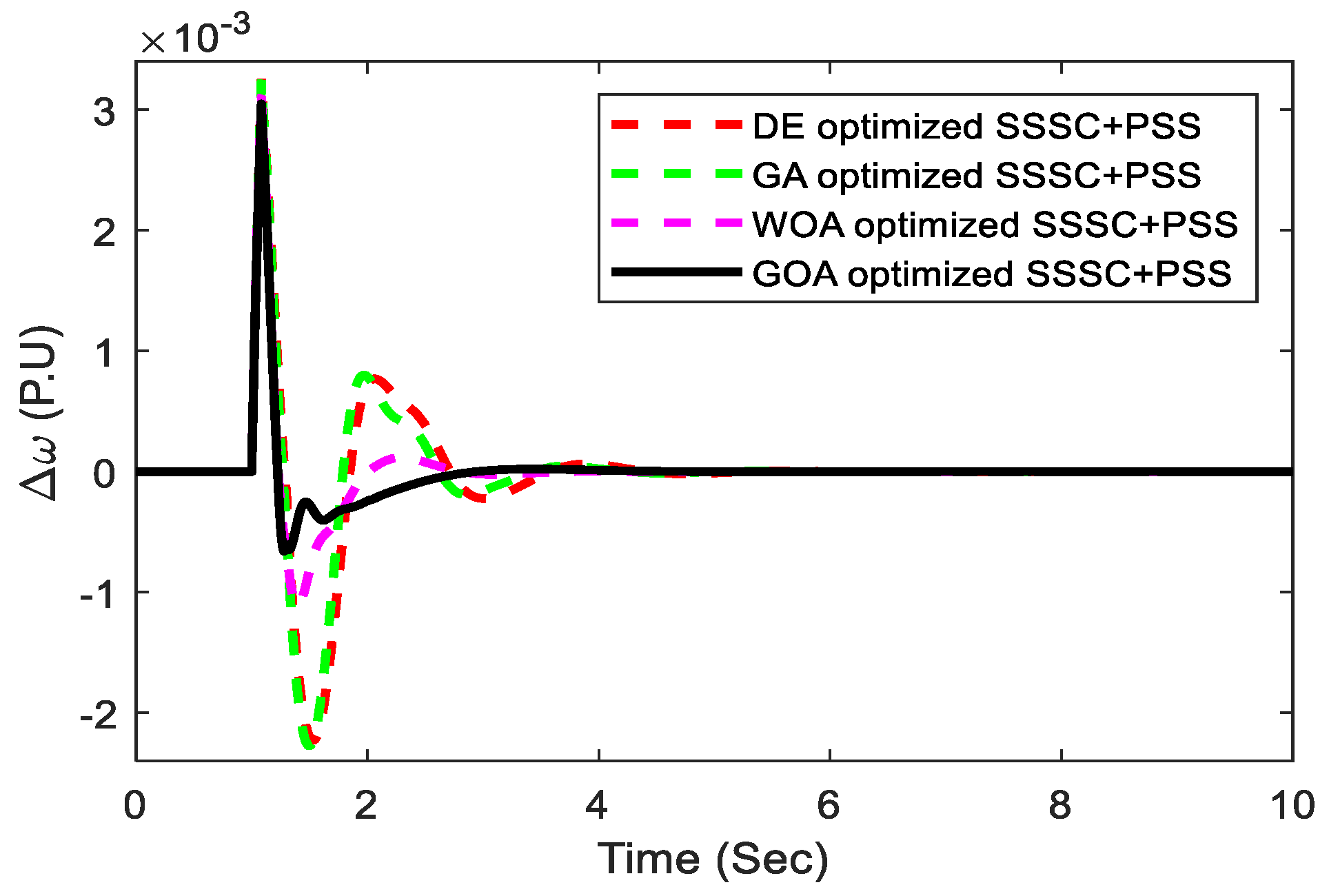
5.1. SMIB Power System
5.1.1. Case A: Nominal Loading Condition
5.1.2. Case B: Light Loading Condition
5.1.3. Case C: Heavy Loading Condition
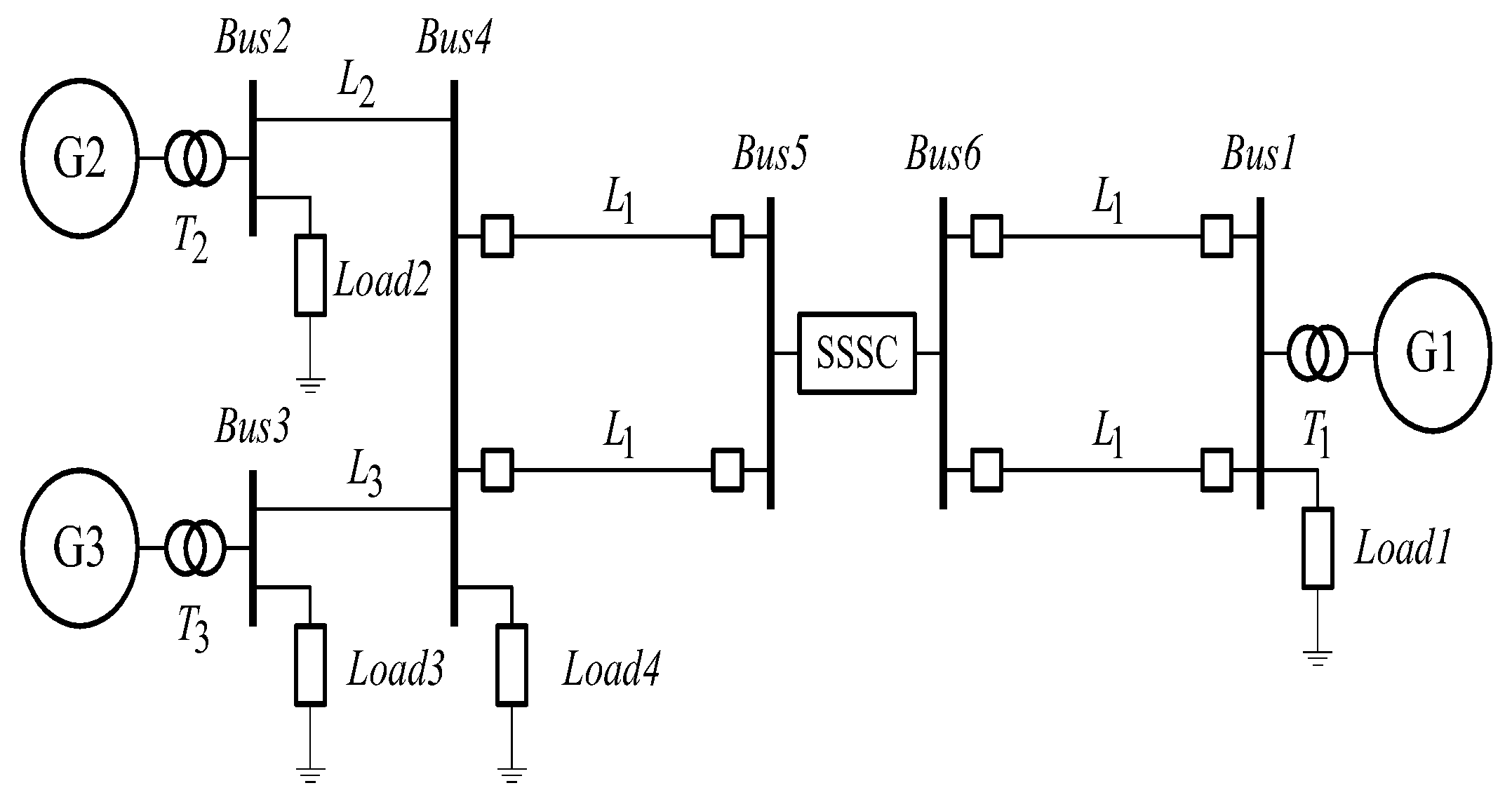
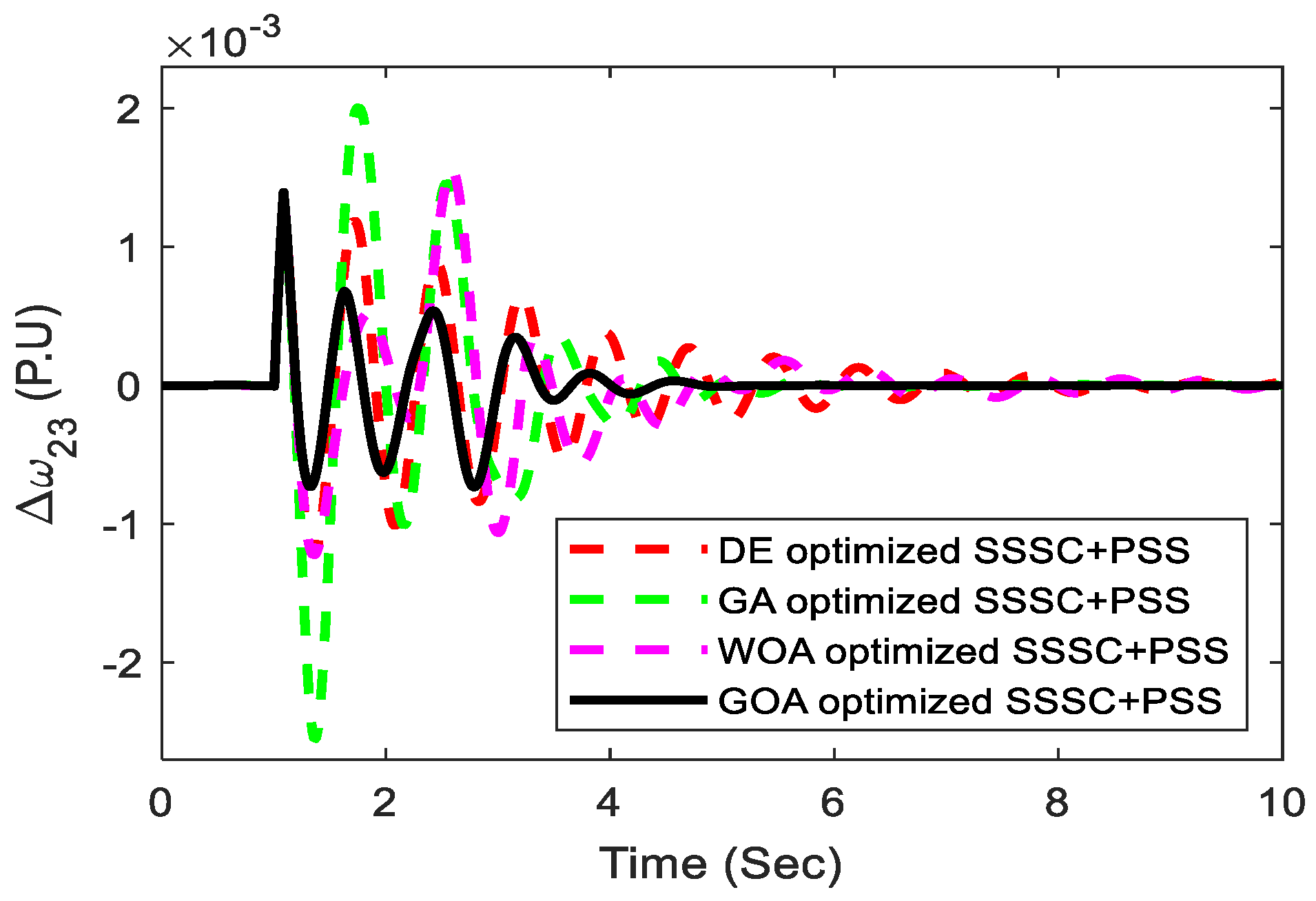
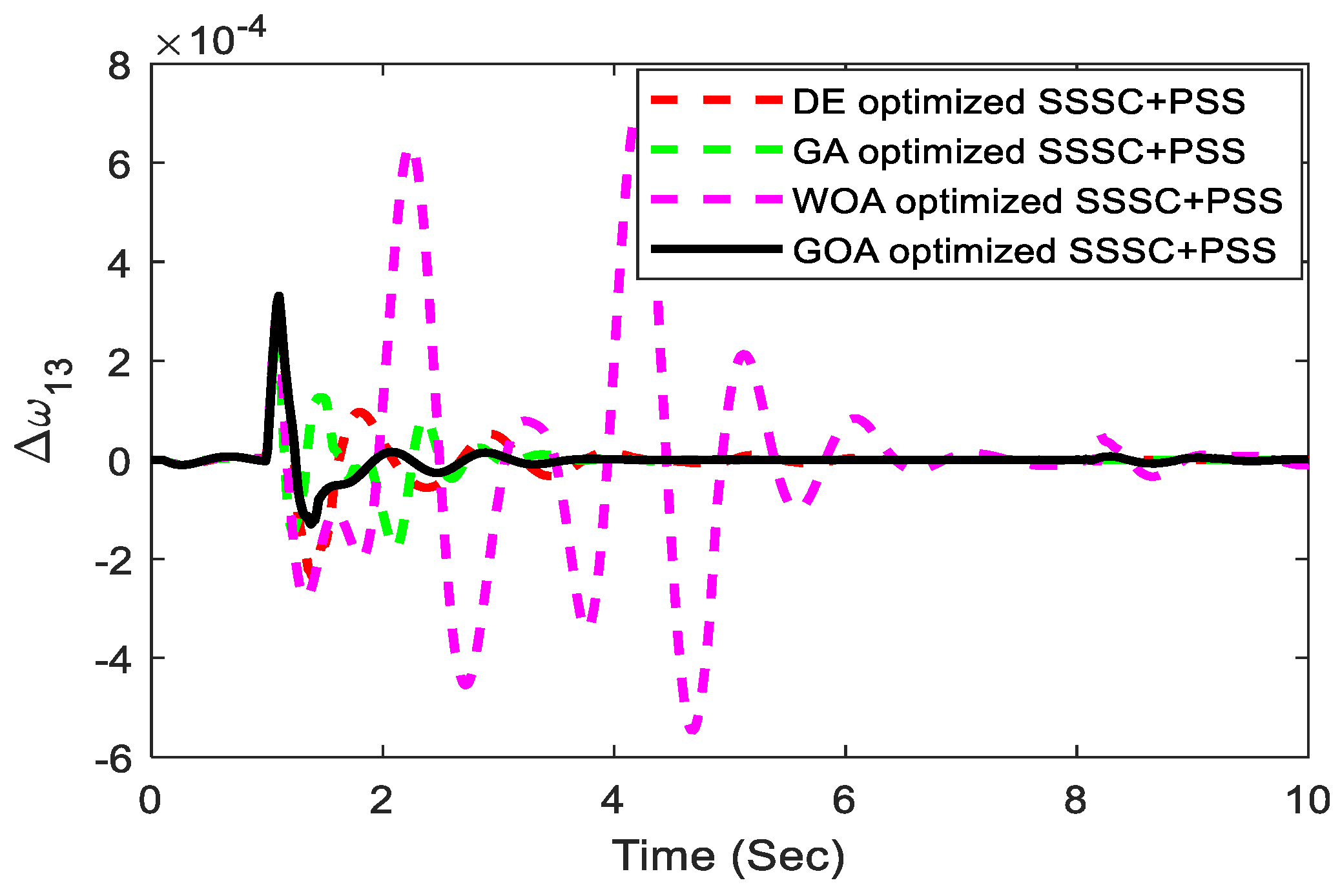
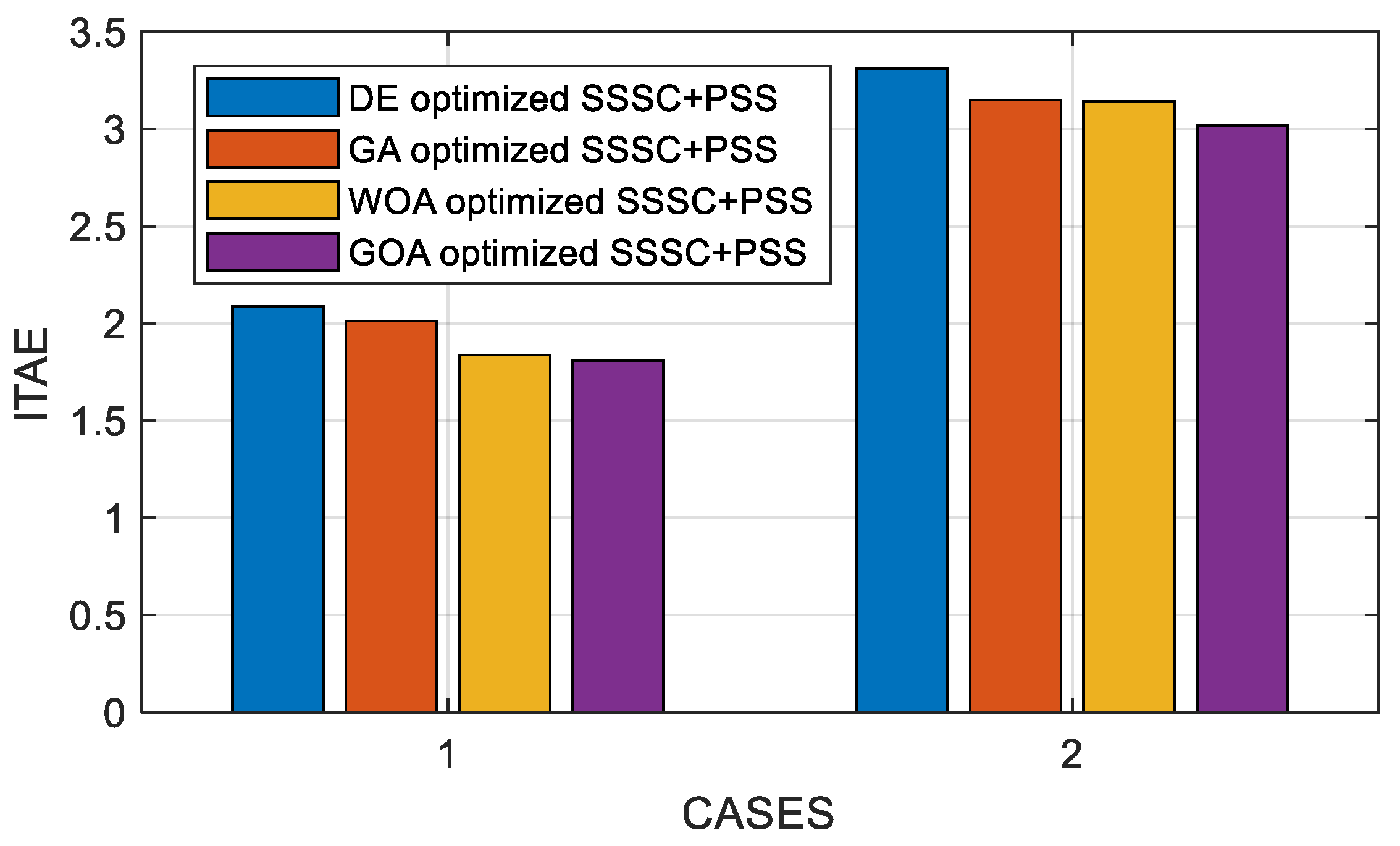
5.2. Extension to Multi-Machine Power System
5.2.1. Scenario 1: Three-Phase Fault Disturbance
5.2.2. Scenario 2: Small Disturbance
- Initially, a SMIB system with a fuzzy lead-lag structured controller is considered, and the dominance of GOA as related to WOA, DE, and GA is demonstrated.
- The percentage decrease in J value with the GOA technique compared with recently published WOA, well-established GA, and DE are 16.32%, 14.56%, and 13.72%, respectively, in the SMIB system. The percentage decrease in J value with the proposed GOA technique compared with recently published WOA, well-established GA, and DE are 1.41%, 9.98%, and 13.31%, respectively, for the multi-machine system.
- The effectiveness of the GOA is validated with various load conditions and results confirmed that GOA performed better compared with the recently published WOA, and well-established GA and DE optimization algorithms.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
References
- Ustun, T.S.; Hashimoto, J.; Otani, K. Impact of Smart Inverters on Feeder Hosting Capacity of Distribution Networks. IEEE Access 2019, 7, 163526–163536. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Double stage controller optimization for load frequency stabilization in hybrid wind-ocean wave energy based maritime microgrid system. Appl. Energy 2021, 282, 116–171. [Google Scholar] [CrossRef]
- Latif, A.; Paul, M.; Das, D.C.; Hussain, S.M.S.; Ustun, T.S. Price Based Demand Response for Optimal Frequency Stabilization in ORC Solar Thermal Based Isolated Hybrid Microgrid under Salp Swarm Technique. Electronics 2020, 9, 2209. [Google Scholar] [CrossRef]
- Hussain, I.; Das, D.C.; Sinha, N.; Latif, A.; Hussain, S.M.S.; Ustun, T.S. Performance Assessment of an Islanded Hybrid Power System with Different Storage Combinations Using an FPA-Tuned Two-Degree-of-Freedom (2DOF) Controller. Energies 2020, 13, 5610. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Optimization of Two-Stage IPD-(1+I) Controllers for Frequency Regulation of Sustainable Energy Based Hybrid Microgrid Network. Electronics 2021, 10, 919. [Google Scholar] [CrossRef]
- Chauhan, A.; Upadhyay, S.; Khan, M.T.; Hussain, S.M.S.; Ustun, T.S. Performance Investigation of a Solar Photovoltaic/Diesel Generator Based Hybrid System with Cycle Charging Strategy Using BBO Algorithm. Sustainability 2021, 13, 8048. [Google Scholar] [CrossRef]
- Das, A.; Dawn, S.; Gope, S.; Ustun, T.S. A Strategy for System Risk Mitigation Using FACTS Devices in a Wind Incorporated Competitive Power System. Sustainability 2022, 14, 8069. [Google Scholar] [CrossRef]
- Ranjan, S.; Das, D.C.; Sinha, N.; Latif, A.; Hussain, S.M.S.; Ustun, T.S. Voltage stability assessment of isolated hybrid dish-stirling solar-thermal-diesel microgrid with STATCOM using mine blast algorithm. Electr. Power Syst. Res. 2021, 196, 107239. [Google Scholar] [CrossRef]
- Singh, N.K.; Koley, C.; Gope, S.; Dawn, S.; Ustun, T.S. An Economic Risk Analysis in Wind and Pumped Hydro Energy Storage Integrated Power System Using Meta-Heuristic Algorithm. Sustainability 2021, 13, 13542. [Google Scholar] [CrossRef]
- Das, A.; Dawn, S.; Gope, S.; Ustun, T.S. A Risk Curtailment Strategy for Solar PV-Battery Integrated Competitive Power System. Electronics 2022, 11, 1251. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Optimum Synthesis of a BOA Optimized Novel Dual-Stage PI − (1 + ID) Controller for Frequency Response of a Microgrid. Energies 2020, 13, 3446. [Google Scholar] [CrossRef]
- Dey, P.P.; Das, D.C.; Latif, A.; Hussain, S.M.S.; Ustun, T.S. Active Power Management of Virtual Power Plant under Penetration of Central Receiver Solar Thermal-Wind Using Butterfly Optimization Technique. Sustainability 2020, 12, 6979. [Google Scholar] [CrossRef]
- Abdolrasol, M.G.M.; Hannan, M.A.; Hussain, S.M.S.; Ustun, T.S.; Sarker, M.R.; Ker, P.J. Energy Management Scheduling for Microgrids in the Virtual Power Plant System Using Artificial Neural Networks. Energies 2021, 14, 6507. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Design and Implementation of Maiden Dual-Level Controller for Ameliorating Frequency Control in a Hybrid Microgrid. Energies 2021, 14, 2418. [Google Scholar] [CrossRef]
- Dawn, S.; Gope, S.; Das, S.S.; Ustun, T.S. Social Welfare Maximization of Competitive Congested Power Market Considering Wind Farm and Pumped Hydroelectric Storage System. Electronics 2021, 10, 2611. [Google Scholar] [CrossRef]
- Kumar, K.K.P.; Soren, N.; Latif, A.; Das, D.C.; Hussain, S.M.S.; Al-Durra, A.; Ustun, T.S. Day-Ahead DSM-Integrated Hybrid-Power-Management-Incorporated CEED of Solar Thermal/Wind/Wave/BESS System Using HFPSO. Sustainability 2022, 14, 1169. [Google Scholar] [CrossRef]
- Farooq, Z.; Rahman, A.; Hussain, S.M.S.; Ustun, T.S. Power Generation Control of Renewable Energy Based Hybrid Deregulated Power System. Energies 2022, 15, 517. [Google Scholar] [CrossRef]
- Gholipour, E.; Isazadeh, G.H. Design of a new adaptive optimal wide area IPFC damping controller in Iran transmission network. Int. J. Electr. Power Energy Syst. 2013, 53, 529–539. [Google Scholar] [CrossRef]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994; Volume 7. [Google Scholar]
- Ali, E.S.; Abd-Elazim, S.M. Coordinated design of PSSs and TCSC via bacterial swarm optimization algorithm in a multimachine power system. Int. J. Electr. Power Energy Syst. 2012, 36, 84–92. [Google Scholar] [CrossRef]
- Cai, L.J.; Erlich, I. Simultaneous coordinated tuning of PSS and FACTS damping controllers in large power systems. IEEE Trans. Power Syst. 2005, 20, 294–300. [Google Scholar] [CrossRef]
- Padiyar, K.R.; Prabhu, N. Design and performance evaluation of sub-synchronous damping controller with STATCOM. IEEE Trans. Power Deliv. 2006, 21, 1398–1405. [Google Scholar] [CrossRef]
- Abd-Elazim, S.M.; Ali, E.S. Coordinated design of PSSs and SVC via bacterial foraging optimization algorithm in a multi-machine power system. Int. J. Electr. Power Energy Syst. 2012, 41, 44–53. [Google Scholar] [CrossRef]
- Ray, S.; Venayagamoorthy, G.K.; Watanabe, E.H. A computational approach to optimal damping controller design for a GCSC. IEEE Trans. Power Deliv. 2008, 23, 1673–1681. [Google Scholar] [CrossRef]
- Panda, S.; Yegireddy, N.K.; Mohapatra, S.K. Hybrid BFOA–PSO approach for coordinated design of PSS and SSSC-based controller considering time delays. Int. J. Electr. Power Energy Syst. 2013, 49, 221–233. [Google Scholar] [CrossRef]
- Bastos-Filho, C.J.; Chaves, D.A.; Silva, F.S.; Pereira, H.A.; Martins-Filho, J.F. Wavelength assignment for physical-layer-impaired optical networks using evolutionary computation. J. Opt. Commun. Netw. 2011, 3, 178–188. [Google Scholar] [CrossRef]
- Jolfaei, M.G.; Sharaf, A.M.; Shariatmadar, S.M.; Poudeh, M.B. A hybrid PSS–SSSC GA-stabilization scheme for damping power system small signal oscillations. Electr. Power Energy Syst. 2016, 75, 337–344. [Google Scholar] [CrossRef]
- Farah, A.; Belazi, A.; Alqunun, K.; Almalaq, A.; Alshammari, B.M.; Hamida, M.B.B.; Abbassi, R. A new design method for optimal parameters setting of PSSs and SVC damping controllers to alleviate power system stability problem. Energies 2021, 14, 7312. [Google Scholar] [CrossRef]
- Ain, Q.; Jamil, E.; Hameed, S.; Naqvi, K.H. Effects of SSSC and TCSC for enhancement of power system stability under different fault disturbances. Aust. J. Electr. Electron. Eng. 2020, 17, 56–64. [Google Scholar] [CrossRef]
- Khadanga, R.K.; Satapathy, J.K. Time delay approach for PSS and SSSC based coordinated controller design using hybrid PSO–GSA algorithm. Electr. Power Energy Syst. 2015, 71, 262–273. [Google Scholar] [CrossRef]
- Kamarposhti, M.A.; Colak, I.; Iwendi, C.; Band, S.S.; Ibeke, E. Optimal coordination of PSS and SSSC controllers in power system using ant colony optimization algorithm. J. Circuits Syst. Comput. 2022, 31, 2250060. [Google Scholar] [CrossRef]
- Khampariya, P.; Panda, S.; Alharbi, H.; Abdelaziz, A.Y.; Ghoneim, S.S. Coordinated Design of Type-2 Fuzzy Lead–Lag-Structured SSSCs and PSSs for Power System Stability Improvement. Sustainability 2022, 14, 6656. [Google Scholar] [CrossRef]
- Kar, M.K.; Kumar, S.; Singh, A.K.; Panigrahi, S. A modified sine cosine algorithm with ensemble search agent updating schemes for small signal stability analysis. Int. Trans. Electr. Energy Syst. 2021, 31, e13058. [Google Scholar] [CrossRef]
- Rout, B.; Pati, B.B.; Panda, S. Modified SCA algorithm for SSSC damping Controller design in Power System. ECTI Trans. Electr. Eng. Electron. Commun. 2018, 16, 46–63. [Google Scholar] [CrossRef] [Green Version]
- Bindumol, E.K.; Mini, V.; Chandran, N. Coordinated Control of PSS and SSSC using PSO to Improve Power System Stability. In Emerging Technologies for Sustainability; CRC Press: Boca Raton, FL, USA, 2020; pp. 293–302. [Google Scholar]
- Sahu, P.R.; Hota, P.K.; Panda, S. Modified whale optimization algorithm for coordinated design of fuzzy lead-lag structure-based SSSC controller and power system stabilizer. Int. Trans. Electr. Energy Syst. 2019, 29, e2797. [Google Scholar] [CrossRef]
- Ansari, J.; Abbasi, A.R.; Heydari, M.H.; Avazzadeh, Z. Simultaneous design of fuzzy PSS and fuzzy STATCOM controllers for power system stability enhancement. Alex. Eng. J. 2022, 61, 2841–2850. [Google Scholar] [CrossRef]
- Esmaili, M.R.; Hooshmand, R.A.; Parastegari, M.; GhaebiPanah, P.; Azizkhani, S. New coordinated design of SVC and PSS for multi-machine power system using BFPSO algorithm. Procedia Technol. 2013, 11, 65–74. [Google Scholar] [CrossRef] [Green Version]
- Afzalan, E.; Joorabian, M. Analysis of the simultaneous coordinated design of STATCOM-based damping stabilizers and PSS in a multi-machine power system using the seeker optimization algorithm. Int. J. Electr. Power Energy Syst. 2013, 53, 1003–1017. [Google Scholar] [CrossRef]
- Sahu, P.R.; Hota, P.K.; Panda, S.; Lenka, R.K.; Padmanaban, S.; Blaabjerg, F. Coordinated Design of FACTS Controller with PSS for Stability Enhancement Using a Novel Hybrid Whale Optimization Algorithm–Nelder Mead Approach. Electr. Power Compon. Syst. 2022, 1–6. [Google Scholar] [CrossRef]
- Rodrigues, F.; Molina, Y.; Silva, C.; Ñaupari, Z. Simultaneous tuning of the AVR and PSS parameters using particle swarm optimization with oscillating exponential decay. Int. J. Electr. Power Energy Syst. 2021, 133, 107215. [Google Scholar] [CrossRef]
- Fortes, E.V.; Martins, L.F.; Costa, M.V.; Carvalho, L.; Macedo, L.H.; Romero, R. Mayfly Optimization Algorithm Applied to the Design of PSS and SSSC-POD Controllers for Damping Low-Frequency Oscillations in Power Systems. Int. Trans. Electr. Energy Syst. 2022, 2022, 5612334. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper optimization algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef] [Green Version]
- Panda, S. Multi-objective evolutionary algorithm for SSSC-based controller design. Electr. Power Syst. Res. 2009, 79, 937–944. [Google Scholar] [CrossRef]
- Panda, S.; Swain, S.C.; Rautray, P.K.; Malik, R.K.; Panda, G. Design and analysis of SSSC based supplementary damping controller. Simul. Model Pr. Theory 2010, 18, 1199–1213. [Google Scholar] [CrossRef]
- Khuntia, S.R.; Panda, S. ANFIS approach for SSSC controller design for the improvement of transient stability performance. Math. Comput. Model. 2013, 57, 289–300. [Google Scholar] [CrossRef]
- Panda, S. Differential evolution algorithm for SSSC-based damping controller design considering time delay. J. Frankl. Inst. 2011, 348, 1903–1926. [Google Scholar] [CrossRef]
- Mudi, K.R.; Pal, R.N. A self-tuning fuzzy PI controller. Fuzzy Sets Syst. 2000, 115, 327–388. [Google Scholar] [CrossRef]
- Woo, Z.W.; Chung, H.Y.; Lin, J.J. A PID type fuzzy controller with self-tuning scaling factors. Fuzzy Sets Syst. 2000, 115, 321–326. [Google Scholar] [CrossRef]
- Abdolrasol, M.G.; Hannan, M.A.; Hussain, S.S.; Ustun, T.S. Optimal PI controller based PSO optimization for PV inverter using SPWM techniques. Energy Rep. 2022, 8, 1003–1011. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimization Techniques | Elements/Parameters | KPi | T1i | T2i | T3i | T4i | K1i | K2i | K3i |
|---|---|---|---|---|---|---|---|---|---|
| DE | SSSC controller | 22.01 | 0.2923 | 0.3408 | 1.2441 | 1.1502 | 1.7200 | 1.8670 | 1.9664 |
| PSS | 3.075 | 1.8607 | 1.4581 | 1.4764 | 0.1360 | 1.7171 | 1.5712 | 1.0303 | |
| GA | SSSC controller | 89.44 | 0.2669 | 1.7653 | 1.8048 | 0.0857 | 1.0057 | 0.5662 | 0.6161 |
| PSS | 67.48 | 0.4696 | 0.2484 | 1.1000 | 1.8886 | 0.0217 | 0.2992 | 1.3733 | |
| WOA | SSSC controller | 65.36 | 1.5746 | 0.7034 | 0.7493 | 1.3192 | 0.5750 | 1.8149 | 0.0263 |
| PSS | 15.77 | 1.0111 | 0.9367 | 0.4632 | 0.0102 | 0.8806 | 1.8313 | 0.8059 | |
| GOA | SSSC controller | 77.81 | 2.9293 | 1.7299 | 1.9208 | 3.1816 | 3.3687 | 1.4002 | 1.6572 |
| PSS | 19.30 | 0.0636 | 1.3818 | 4.1797 | 1.7307 | 1.3187 | 2.2052 | 3.4003 |
| Techniques/Cases | DE | GA | WOA | GOA |
|---|---|---|---|---|
| Case-a (×10−4) | 9.311 | 9.402 | 9.600 | 8.033 |
| Case-b (×10−4) | 3.802 | 3.101 | 2.333 | 1.989 |
| Case-c (×10−4) | 3.422 | 3.225 | 2.910 | 2.111 |
| Studied Controller/ Algorithms | Speed Deviation for Case-a | Speed Deviation for Case-b | Speed Deviation for Case-c | ||||||
|---|---|---|---|---|---|---|---|---|---|
| US (×10−3) | ST | ITAE (×10−3) | US (×10−3) | ST | ITAE (×10−3) | US (×10−3) | ST | ITAE (×10−3) | |
| DE | −8.5 | 3.46 | 9.31 | −2.98 | 3.72 | 3.80 | −2.24 | 4.05 | 3.422 |
| GA | −8.1 | 3.42 | 9.40 | −3.04 | 3.44 | 3.10 | −2.27 | 3.40 | 3.225 |
| WOA | −8.6 | 3.65 | 9.60 | −2.97 | 3.13 | 2.33 | −1.10 | 3.38 | 2.910 |
| GOA | −6.34 | 3.32 | 8.03 | −2.15 | 2.74 | 1.98 | −0.65 | 2.70 | 2.111 |
| Optimization Techniques | Elements/Parameters | KPi | T1i | T2i | T3i | T4i | K1i | K2i | K3i |
|---|---|---|---|---|---|---|---|---|---|
| DE | SSSC controller | 11.48 | 0.1295 | 0.0161 | 0.1266 | 0.0788 | 0.0289 | 0.1029 | 0.0465 |
| PSS-1 | 1.67 | 0.0490 | 0.0378 | 0.0459 | 0.0181 | 0.1305 | 0.0635 | 0.1122 | |
| PSS-2 | 7.095 | 0.1047 | 0.1117 | 0.0945 | 0.0335 | 0.1030 | 0.1718 | 0.1758 | |
| PSS-3 | 3.065 | 0.0496 | 0.1172 | 0.1315 | 0.0891 | 0.0491 | 0.1899 | 0.0256 | |
| GA | SSSC controller | 148.38 | 1.3759 | 0.5413 | 0.7554 | 1.7241 | 3.2915 | 0.5990 | 0.0121 |
| PSS-1 | 115.14 | 1.7816 | 1.6899 | 0.2470 | 1.0721 | 1.6739 | 3.7255 | 0.7186 | |
| PSS-2 | 5.535 | 1.7971 | 1.6366 | 1.3511 | 0.2691 | 0.3825 | 2.0267 | 1.3590 | |
| PSS-3 | 156.38 | 0.2105 | 1.5969 | 1.4985 | 1.3704 | 0.9235 | 1.6272 | 1.7362 | |
| WOA | SSSC controller | 18.74 | 0.1421 | 0.0737 | 0.3441 | 0.2203 | 0.0950 | 0.3556 | 0.2218 |
| PSS-1 | 18.06 | 0.1225 | 0.3331 | 0.1270 | 0.1575 | 0.3440 | 0.2852 | 0.1094 | |
| PSS-2 | 5.145 | 0.0331 | 0.1805 | 0.2334 | 0.1082 | 0.2473 | 0.3476 | 0.0636 | |
| PSS-3 | 12.125 | 0.0617 | 0.0344 | 0.0244 | 0.2349 | 0.2944 | 0.2090 | 0.2354 | |
| GOA | SSSC controller | 19.475 | 0.2698 | 0.1579 | 0.2650 | 0.3337 | 0.2969 | 0.2245 | 0.0387 |
| PSS-1 | 7.82 | 0.1345 | 0.3030 | 0.1274 | 0.0174 | 0.1902 | 0.3474 | 0.0038 | |
| PSS-2 | 19.315 | 0.2740 | 1.1771 | 0.3191 | 0.0303 | 0.1175 | 0.3699 | 0.0619 | |
| PSS-3 | 8.695 | 0.0508 | 0.1329 | 0.0985 | 0.1961 | 0.2872 | 0.3530 | 0.0338 |
| Techniques/Cases | DE | GA | WOA | GOA |
|---|---|---|---|---|
| Case-a (×10−4) | 2.089 | 2.012 | 1.837 | 1.811 |
| Case-b (× 10−4) | 3.311 | 3.150 | 3.142 | 3.021 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sahu, P.R.; Lenka, R.K.; Khadanga, R.K.; Hota, P.K.; Panda, S.; Ustun, T.S. Power System Stability Improvement of FACTS Controller and PSS Design: A Time-Delay Approach. Sustainability 2022, 14, 14649. https://doi.org/10.3390/su142114649
Sahu PR, Lenka RK, Khadanga RK, Hota PK, Panda S, Ustun TS. Power System Stability Improvement of FACTS Controller and PSS Design: A Time-Delay Approach. Sustainability. 2022; 14(21):14649. https://doi.org/10.3390/su142114649
Chicago/Turabian StyleSahu, Preeti Ranjan, Rajesh Kumar Lenka, Rajendra Kumar Khadanga, Prakash Kumar Hota, Sidhartha Panda, and Taha Selim Ustun. 2022. "Power System Stability Improvement of FACTS Controller and PSS Design: A Time-Delay Approach" Sustainability 14, no. 21: 14649. https://doi.org/10.3390/su142114649
APA StyleSahu, P. R., Lenka, R. K., Khadanga, R. K., Hota, P. K., Panda, S., & Ustun, T. S. (2022). Power System Stability Improvement of FACTS Controller and PSS Design: A Time-Delay Approach. Sustainability, 14(21), 14649. https://doi.org/10.3390/su142114649