
Numerical Optimization of the Dendritic Arm of a Radial Gate Based on Stability and Light Weight


Abstract
:1. Introduction
2. Stability Analysis Method of Dendritic Arm Structure with Two Branches
3. Optimization Analysis of Dendritic Arm Structure with Two Branches
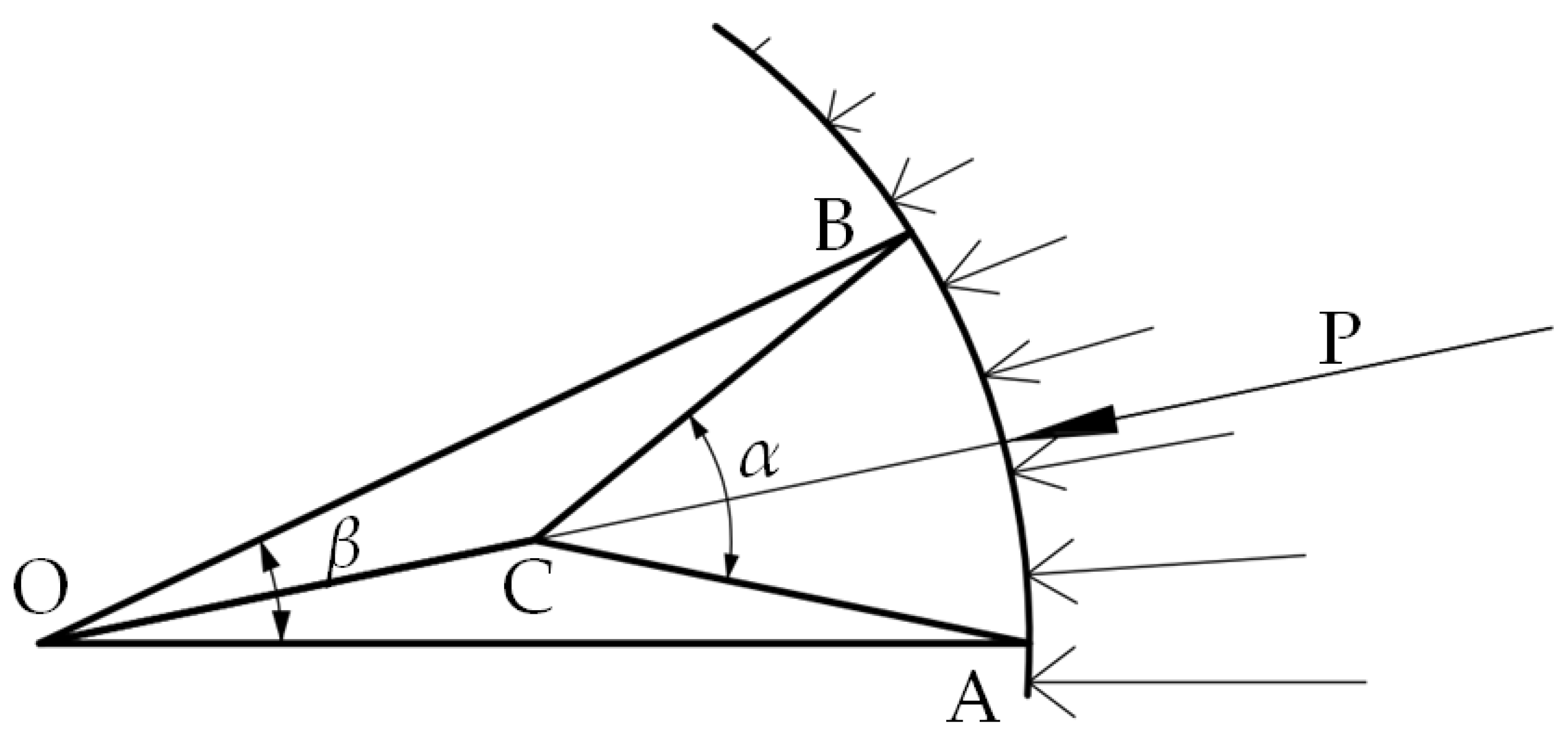
3.1. Geometric Model
3.2. Computational Model
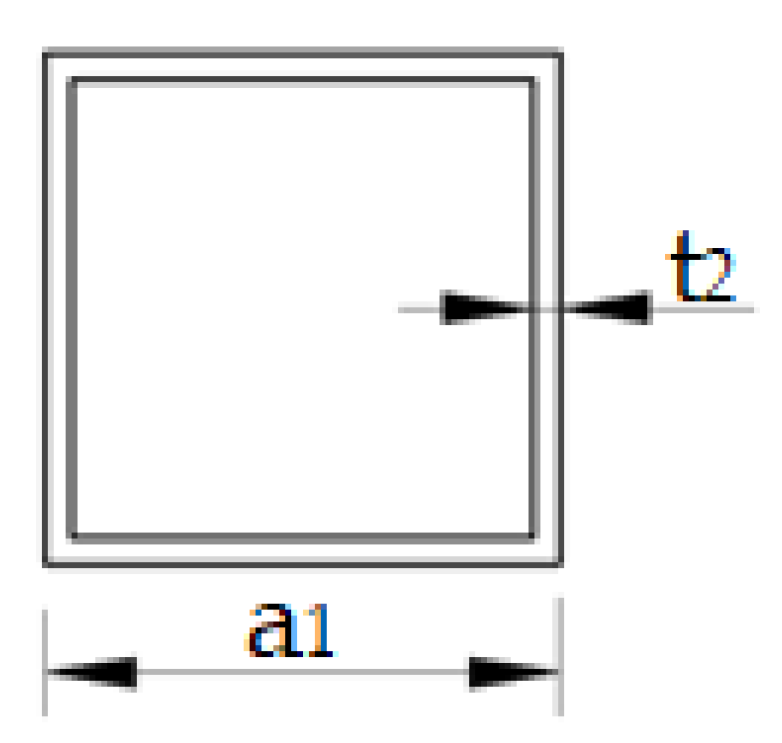
3.2.1. Parameter Selection
3.2.2. Constraint Conditions
- Strength: σi ≤ [σ], i = 1,2,3, where σi is the critical stress of the trunk and two branches, respectively, where [σ] = 345 MPa;
- Stiffness: λmax ≤ [λ], where the maximum flexibility of a strut must be less than the permissible value λmax in the specification and satisfy the flexibility range of a medium flexibility strut. In the specifications of radial gates, the allowable value [λ] of the arm is 120;
- Overall stability: a double nonlinear buckling analysis of a dendritic arm with a two-branched structure was implemented using the structural finite element method to ensure the overall stability of the structure;
- Local stability: the ratio of the width and thickness of a flange must meet Formula (7), that is:
3.2.3. Objective Function
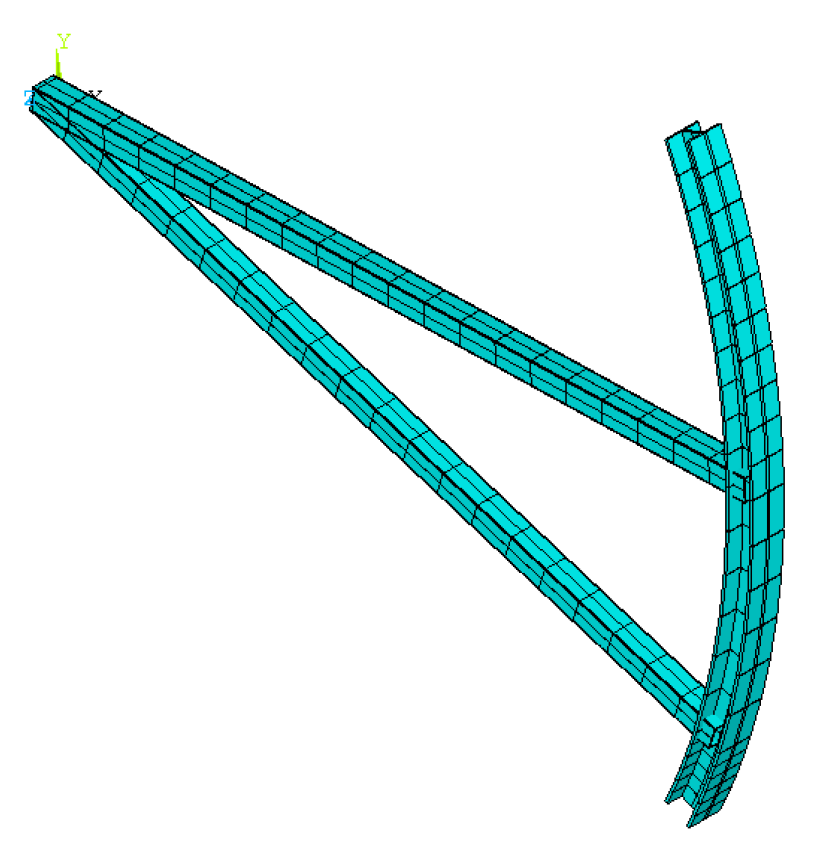
3.3. Solution of Numerical Optimization
- According to the geometric model, the crotch points were determined; then, the appropriate unit model, Beam188, was chosen. The unit has two nodes and two beam elements and is based on Timoshenko’s beam element theory. The large deformation, large angle, and large strain effect of the beam element were considered in the nonlinear analysis;
- Material properties were determined: the yield strength of Q345 B steel is 345 MPa, and the elastic modulus and Poisson’s ratio are 2.06 × 105 MPa and 0.3, respectively, which is considered as an ideal elastic–plastic material. The bilinear isotropic hardening model (BISO) was used to simulate its constitutive relations in ANSYS software;
- Constraints were imposed: according to the design specifications of a steel gate, the line stiffness ratio of main longitudinal beam and branch is controlled within the range of 4~11. The branch and girder are a rigid connection, while the hinge is hinged at the trunk;
- Initial imperfections were applied: according to the specifications of a steel gate, the initial imperfection of the dendritic arm with a two-branched structure was applied; its standard was 0.1% of the first-order buckling deflection, which was obtained by eigenvalue buckling analysis [18];
- The NR method was used to solve the problem, and the Von-Mises yield criterion was adopted. Finally, the results of extraction and analysis were carried out.
4. Calculation Analysis
4.1. Comparison of Two Kinds of Arm Structures
4.2. Optimization Results of the Dendritic Arm with Two-Branched Structure
5. Influence of Radial Gate Radius on the Optimal Tree Type of Dendritic Arm with Two Branches
- where is the length ratio of the branch and trunk, is the height ratio of the cross-section of the trunk and branch, and is the thickness ratio of the cross-section of the trunk and branch. From Table 2, , and were almost constant with the increase in the radius, while the change in and were very small. From Figure 10 and Table 2, the radial gate radius had little effect on the optimal tree type and mechanical properties of the dendritic arm with two branches.
6. Conclusions
- A new type of Y-armed structure obtained the respective advantages of high stability with fewer arms and large stiffness with more arms, overcoming the corresponding disadvantages, and the twin objectives of high stability and light weight when the tree type was reasonable could be embodied. Therefore, the new type of Y-armed structure of a radial gate was better than that of the traditional V-type arm structure.
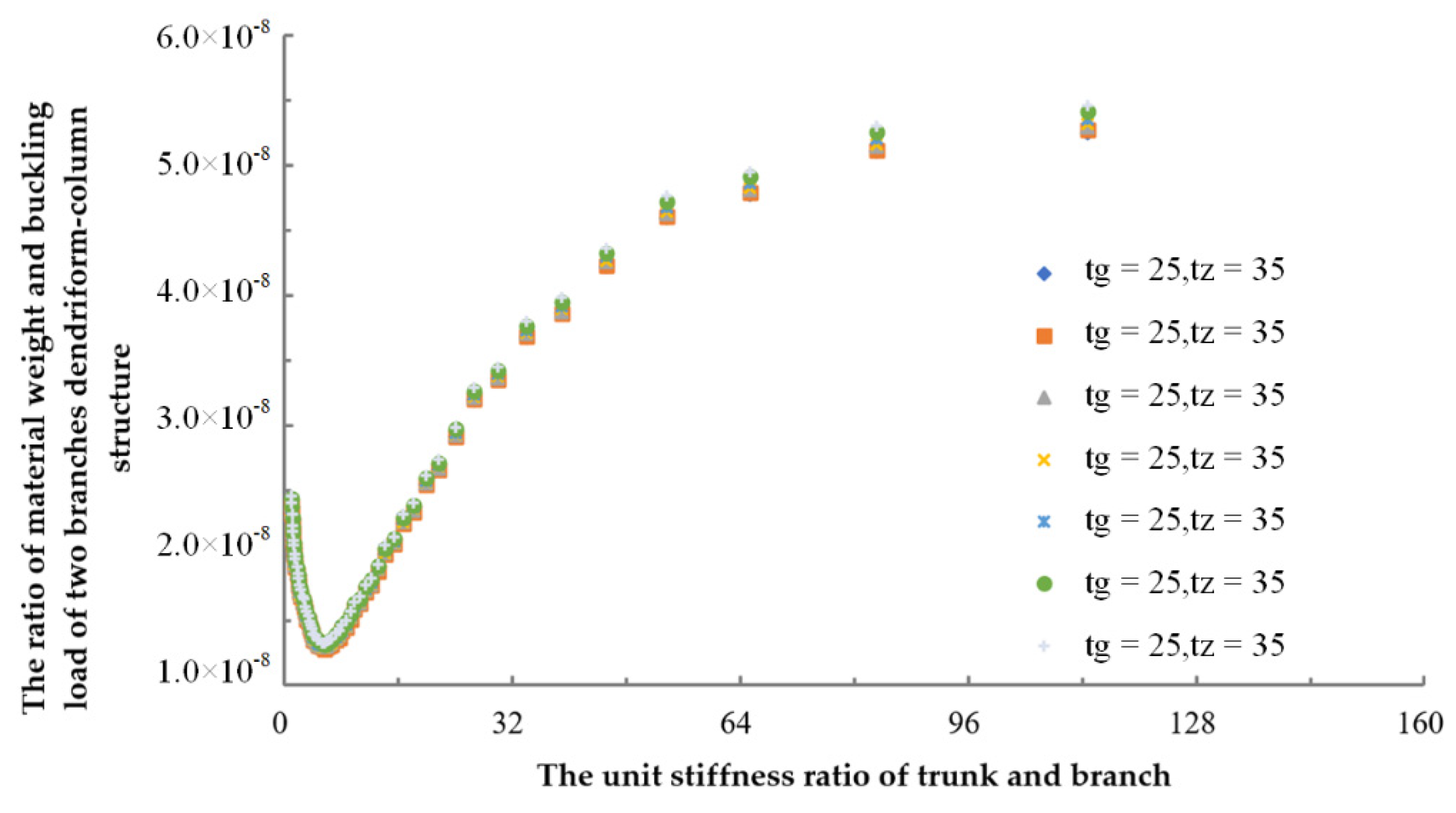
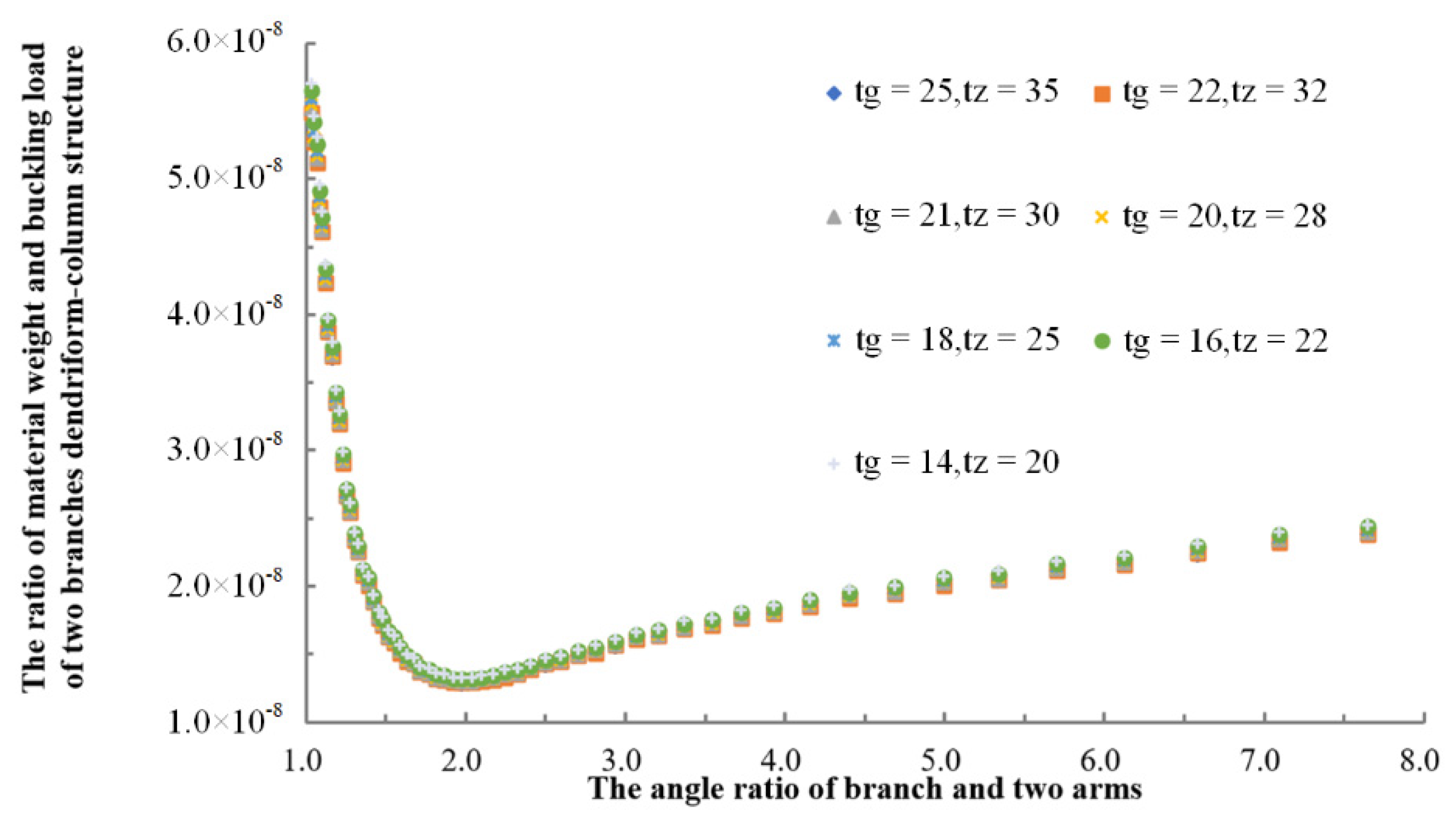
- The parameter settings of the optimal tree type were as follows: the angle ratio between the branches and two arms was [1.92, 2.04], the unit rigidity ratio between the tree trunk and branch was [5.33, 6.02], the length ratio between the corresponding branch and trunk was [0.96, 1.09], the height ratio of the section between trunk and branch was 1.805, and the flange thickness ratio was 1.405. Then, the trunk and branches were unstable simultaneously, the utilization rate of the material reached the maximum, the structure was the lightest, and the overall structural stability was the highest.
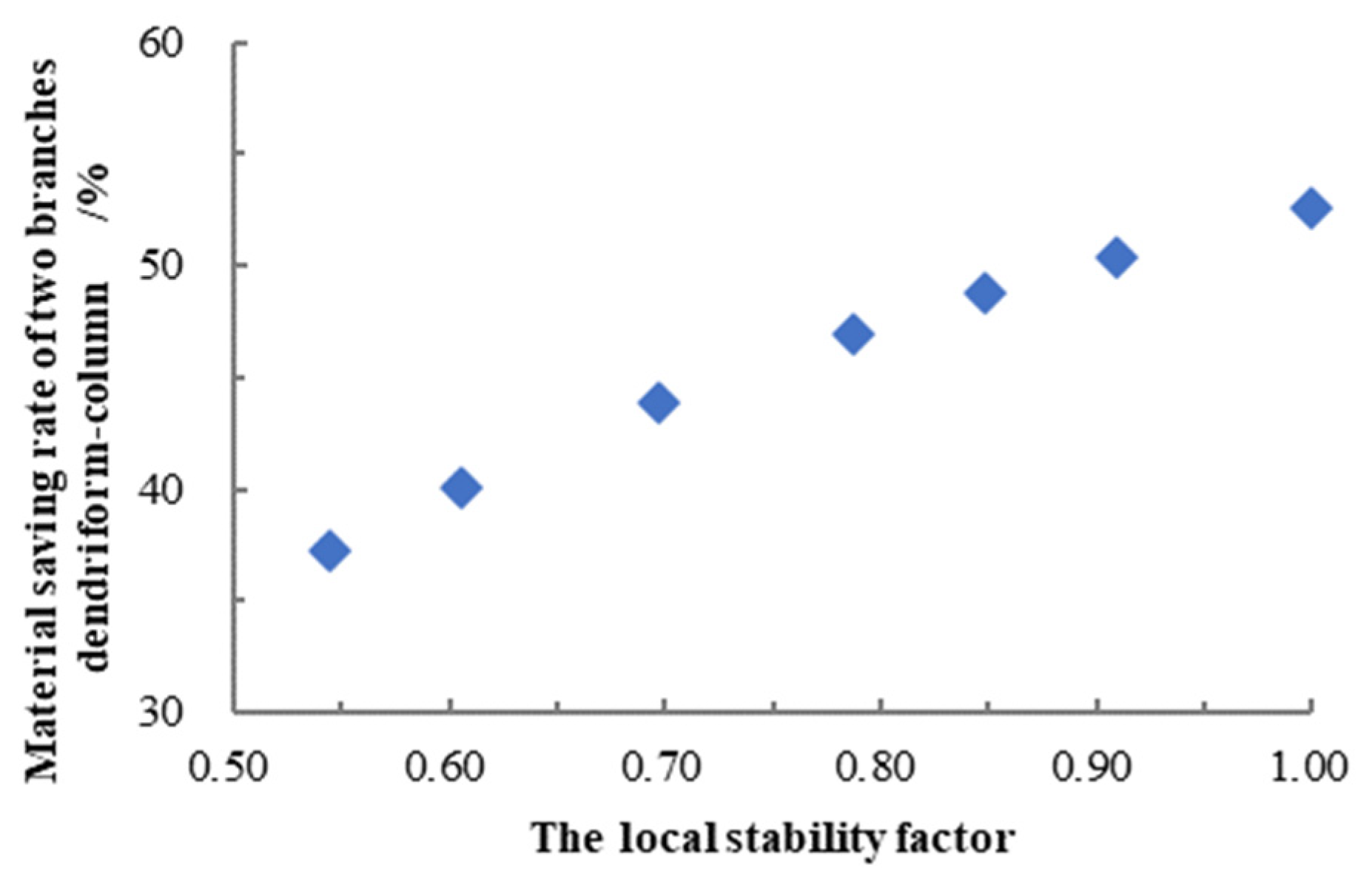
- Compared with two arms when the tree type was optimal, the overall stability of the Y-type structure was higher under the same material, and its overall buckling load was 2.50~4.34 times that of V-type structure; otherwise, the weight of the Y type structure was light under the same critical load, and its material saving rate was 37.19~52.54%. The specific range depended on the local stability coefficient, and when the local stability coefficient was 1, the material saving rate achieved the maximum value.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, J.; Liu, G. Accident analysis and research on light radial steel gate. J. Hydroelectr. Power Gener. 1992, 11, 49–57. (In Chinese) [Google Scholar]
- Iasef, M.; Mario, S. Tree-inspired dendriforms and fractal-like branching structures in architecture: A brief historical overview. Front. Archit. Res. 2014, 3, 298–323. [Google Scholar]
- Zhang, J. Morphological Analysis and Engineering Applications of Branching Structures. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2011. [Google Scholar]
- Von Buelow, P. A Geometric Comparison of Branching Structures in Tension and Compression versus Minimal Paths. In Proceedings of the IASS 2007 Symposium, Venice, Italy, 3–6 December 2007. [Google Scholar]
- Falk, A.; Von Buelow, P. Evolution and Trends in Design, Analysis and Construction of Shell and Spatial Structures. In Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2009, Valencia, Spain, 28 September–2 October 2009. [Google Scholar]
- Allen, E.; Zalewski, W. Formand Forces: Designing Efficient, Expressive Structures; John Wiley & Sons: New York, NY, USA, 2009. [Google Scholar]
- Hunt, J.; Haase, W.; Sobek, W. A Design Tool for Spatialtree Structures. J. Int. Assoc. Shell Spat. Struct. 2009, 50, 3–10. [Google Scholar]
- Kurz, E.; Rau, L.; Frühauf, N.; Haase, W.; Prskalo, M.; Sobek, W. Cost-Efficient manufacturing process of switchable glazing based on twisted nematic LC cells. Proc. SPIE-Int. Soc. Opt. Eng. 2011, 8114, 892753. [Google Scholar]
- Luo, Y. Finite element analysis of dendriform-column. Steel Constr. 2005, 20, 46–49. (In Chinese) [Google Scholar]
- Ma, H.; Shen, L.; Gao, B. Stability design on the dendritic structure with steel tubes. Build. Struct. 2009, 39, 97–99. (In Chinese) [Google Scholar]
- Zhang, J.; Chen, S.; Lin, J. Morphological analysis of steel pipe dendritic supporting structure. Eng. J. Wuhan Univ. 2009, 42, 240–243. (In Chinese) [Google Scholar]
- Wang, Z.; Chen, J.; Zhang, Q. Research on design of dendritic columns in Bionic Steel Structures. Struct. Eng. 2010, 26, 21–25. (In Chinese) [Google Scholar]
- Wu, Y.; Zhang, J.; Cao, Z. Form-finding analysis and engineering application of branching structures. J. Archit. Struct. 2011, 32, 162–168. (In Chinese) [Google Scholar]
- Ministry of Water Resources of the People’s Republic of China. Specification for Design of Steel Gate in Hydraulic and Hydroelectric Engineering (SL74-2013); Water & Power Press: Beijing, China, 2013.
- Zhu, J.; Wang, Z.; Fang, H. Application of topology optimization in optimal layout of large radial steel gate. Yellow River 2007, 29, 63–64. (In Chinese) [Google Scholar]
- Memon, B.; Su, X.Z. Arc-length technique for nonlinear finite element analysis. J. Zhejiang Univ. Sci. 2004, 48, 121–131. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Dong, M. Structural Optimization Design; Higher Education Press: Beijing, China, 1987. (In Chinese) [Google Scholar]
- Shi, G.; Lin, C.; Zhou, W.; Wang, Y. Finite element analysis and design method study on the local buckling of 460 mpa hss box section axial compressed columns. Eng. Mech. 2014, 31, 128–136. (In Chinese) [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trunk Length/m | Branch Length/m | Length Ratio of Branch and Trunk | Unit Stiffness Ratio of Trunk and Branch | Angle Ratio between Two Branches and Two Arms |
|---|---|---|---|---|
| 1.00 | 31.01 | 31.01 | 171.88 | 1.03 |
| 1.50 | 30.52 | 20.35 | 112.76 | 1.05 |
| 29.00 | 5.48 | 0.19 | 1.05 | 7.09 |
| 29.50 | 5.26 | 0.18 | 0.99 | 7.65 |
| R(m) | 28 | 32 | 36 |
|---|---|---|---|
| [5.33, 6,11] | [5.33, 6.02] | [5.34, 5.95] | |
| [1.91, 2.04] | [1.92, 2.04] | [1.93, 2.04] | |
| [0.96, 1.10] | [0.96, 1.09] | [0.96, 1.07] | |
| 1.805 | 1.805 | 1.805 | |
| 1.405 | 1.405 | 1.405 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Y.; Zhang, X.; Cai, K.; Chai, X.; Li, J.; Wang, Z. Numerical Optimization of the Dendritic Arm of a Radial Gate Based on Stability and Light Weight. Sustainability 2022, 14, 16507. https://doi.org/10.3390/su142416507
Han Y, Zhang X, Cai K, Chai X, Li J, Wang Z. Numerical Optimization of the Dendritic Arm of a Radial Gate Based on Stability and Light Weight. Sustainability. 2022; 14(24):16507. https://doi.org/10.3390/su142416507
Chicago/Turabian StyleHan, Yifeng, Xuecai Zhang, Kun Cai, Xu Chai, Jinyu Li, and Zhengzhong Wang. 2022. "Numerical Optimization of the Dendritic Arm of a Radial Gate Based on Stability and Light Weight" Sustainability 14, no. 24: 16507. https://doi.org/10.3390/su142416507
APA StyleHan, Y., Zhang, X., Cai, K., Chai, X., Li, J., & Wang, Z. (2022). Numerical Optimization of the Dendritic Arm of a Radial Gate Based on Stability and Light Weight. Sustainability, 14(24), 16507. https://doi.org/10.3390/su142416507