
Autonomous Vehicle Overtaking: Modeling and an Optimal Trajectory Generation Scheme

 ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Literature Review
3. Autonomous Overtaking Scheme
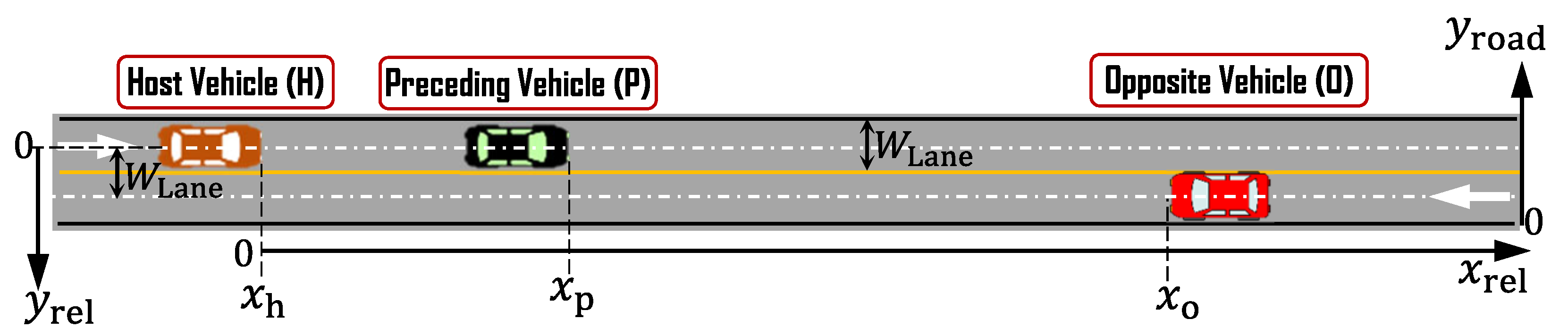
3.1. Overtaking Scenario
3.2. Modeling of Vehicle Control for Overtaking
3.3. Overtaking Feasibility Design
3.4. Optimal Overtaking Problem Formulation
4. Numerical Simulation
4.1. Simulation Settings
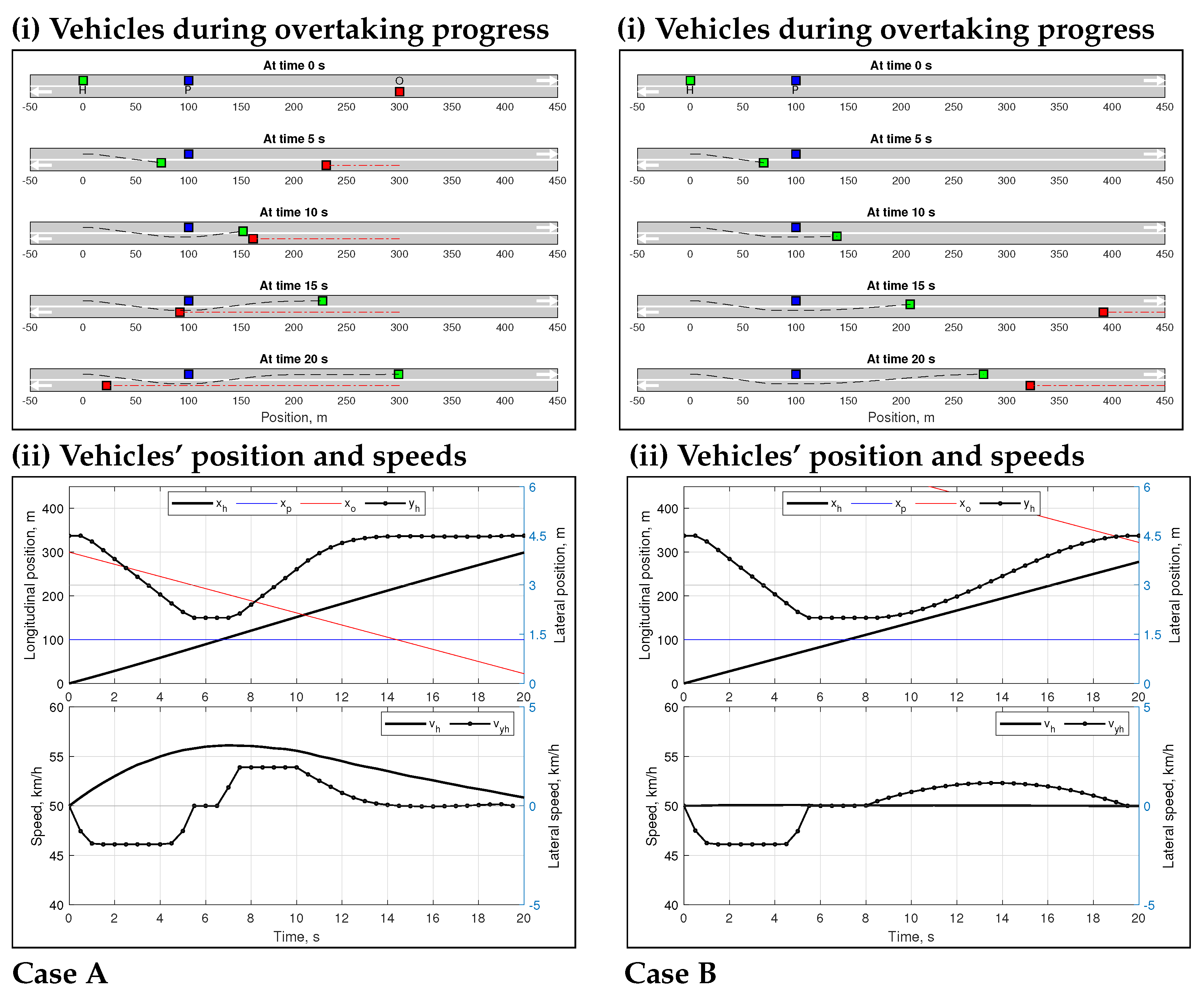
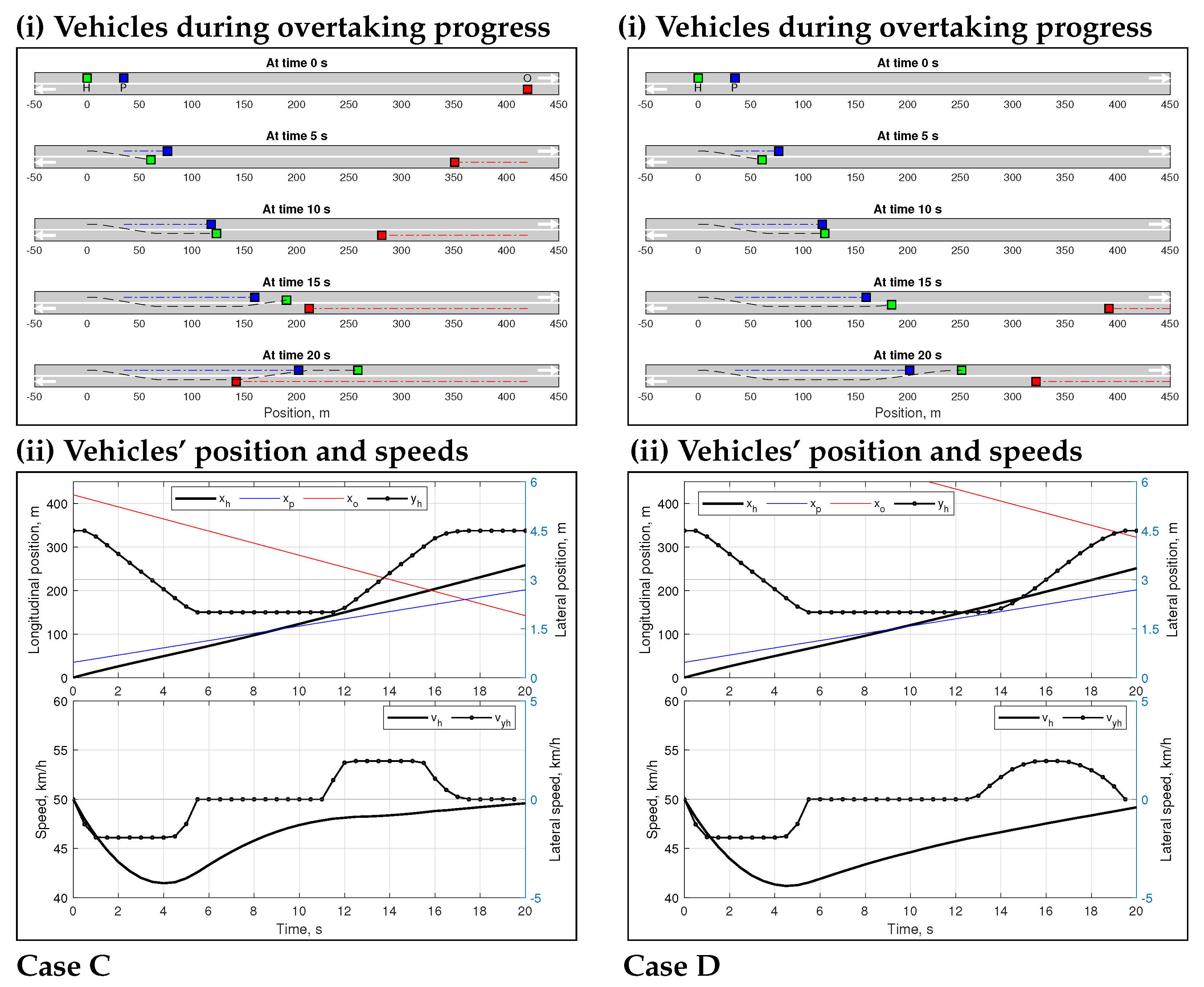
4.2. Optimal Overtaking Trajectories
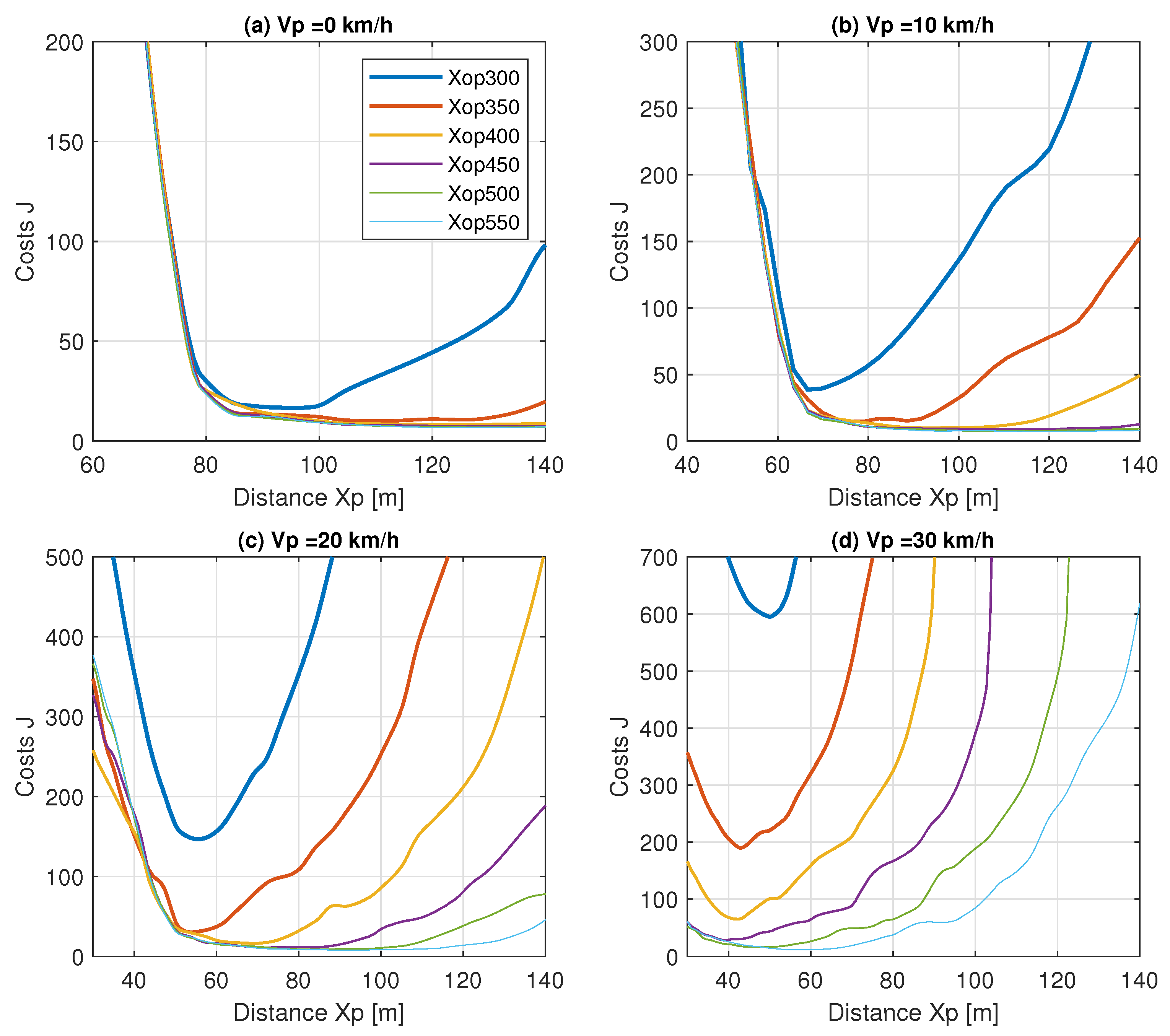
4.3. Optimal Overtaking Costs
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- National Highway Traffic Safety Administration (NHTSA). Traffic Safety Facts: Summary of Motor Vehicle Crashes; DOT HS 813 209; US Department of Transportation: Washington, DC, USA, 2019.
- World Health Organization (WHO). Road Traffic Injuries; WHO: Geneva, Switzerland, 2021; Available online: https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries (accessed on 12 December 2021).
- National Highway Traffic Safety Administration (NHTSA). Traffic Safety Facts: Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; DOT HS 812 115; US Department of Transportation: Washington, DC, USA, 2015.
- Hegeman, G.; van der Horst, R.; Brookhuis, K.; Hoogendoorn, S. Functioning and acceptance of overtaking assistant design tested in driving simulator experiment. Transp. Res. Rec. 2007, 2018, 45–52. [Google Scholar] [CrossRef]
- Dimitrakopoulos, G.; Demestichas, P. Intelligent transportation systems. IEEE Veh. Technol. Mag. 2010, 5, 77–84. [Google Scholar] [CrossRef]
- Wei, S.; Zou, Y.; Zhang, X.; Zhang, T.; Li, X. An integrated longitudinal and lateral vehicle following control system with radar and vehicle-to-vehicle communication. IEEE Trans. Veh. Technol. 2019, 68, 1116–1127. [Google Scholar] [CrossRef]
- Ulbrich, S.; Maurer, M. Probabilistic online POMDP decision making for lane changes in fully automated driving. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems (ITSC), Hague, The Netherlands, 6–9 October 2013; pp. 2063–2070. [Google Scholar]
- You, F.; Zhang, R.; Lie, G.; Wang, H.; Wen, H.; Xu, J. Trajectory planning and tracking control for autonomous lane change maneuver based on the cooperative vehicle infrastructure system. Expert Syst. Appl. 2015, 42, 5932–5946. [Google Scholar] [CrossRef]
- Bakibillah, A.S.M.; Kamal, M.A.S.; Tan, C.P.; Susilawati, S.; Hayakawa, T.; Imura, J.I. Bi-Level coordinated merging of connected and automated vehicles at roundabouts. Sensors 2021, 21, 6533. [Google Scholar] [CrossRef]
- Andersen, H.; Schwarting, W.; Naser, F.; Eng, Y.H.; Ang, M.H.; Rus, D.; Alonso-Mora, J. Trajectory optimization for autonomous overtaking with visibility maximization. In Proceedings of the IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–8. [Google Scholar]
- Naranjo, J.E.; Sotelo, M.A.; Gonzalez, C.; Garcia, R.; De Pedro, T. Using fuzzy logic in automated vehicle control. IEEE Intell. Syst. 2007, 22, 36–45. [Google Scholar] [CrossRef]
- Vlahogianni, E.I. Modeling duration of overtaking in two lane highways. Transp. Res. Part F Traffic Psychol. Behav. 2013, 20, 135–146. [Google Scholar] [CrossRef]
- Hegeman, G.; Brookhuis, K.; Hoogendoorn, S. Opportunities of advanced driver assistance systems towards overtaking. Eur. J. Transp. Infrastruct. Res. 2005, 5, 1–16. [Google Scholar]
- Vanholme, B.; Gruyer, D.; Lusetti, B.; Glaser, S.; Mammar, S. Highly automated driving on highways based on legal safety. IEEE Trans. Intell. Transp. Syst. 2012, 14, 333–347. [Google Scholar] [CrossRef]
- Petrov, P.; Nashashibi, F. Modeling and nonlinear adaptive control for autonomous vehicle overtaking. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1643–1656. [Google Scholar] [CrossRef] [Green Version]
- Dixit, S.; Montanaro, U.; Dianati, M.; Oxtoby, D.; Mizutani, T.; Mouzakitis, A.; Fallah, S. Trajectory planning for autonomous high-speed overtaking in structured environments using robust MPC. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2310–2323. [Google Scholar] [CrossRef]
- Shamir, T. How should an autonomous vehicle overtake a slower moving vehicle: Design and analysis of an optimal trajectory. IEEE Trans. Autom. Control 2004, 49, 607–610. [Google Scholar] [CrossRef]
- Baber, J.; Kolodko, J.; Noel, T.; Parent, M.; Vlacic, L. Cooperative autonomous driving: Intelligent vehicles sharing city roads. IEEE Robot. Autom. Mag. 2005, 12, 44–49. [Google Scholar] [CrossRef] [Green Version]
- Usman, G.; Kunwar, F. Autonomous vehicle overtaking-an online solution. In Proceedings of the IEEE International Conference on Automation and Logistics, Shenyang, China, 5–7 August 2009; pp. 596–601. [Google Scholar]
- Naranjo, J.E.; Gonzalez, C.; Garcia, R.; De Pedro, T. Lane-change fuzzy control in autonomous vehicles for the overtaking maneuver. IEEE Trans. Intell. Transp. Syst. 2008, 9, 438–450. [Google Scholar] [CrossRef] [Green Version]
- Milanés, V.; Llorca, D.F.; Villagrá, J.; Pérez, J.; Fernández, C.; Parra, I.; González, C.; Sotelo, M.A. Intelligent automatic overtaking system using vision for vehicle detection. Expert Syst. Appl. 2012, 39, 3362–3373. [Google Scholar] [CrossRef] [Green Version]
- Ngai, D.C.K.; Yung, N.H.C. A multiple-goal reinforcement learning method for complex vehicle overtaking maneuvers. IEEE Trans. Intell. Transp. Syst. 2011, 12, 509–522. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Yang, M.; Yang, R. Conflict-probability-estimation-based overtaking for intelligent vehicles. IEEE Trans. Intell. Transp. Syst. 2009, 10, 366–370. [Google Scholar] [CrossRef] [Green Version]
- Lattarulo, R.; Pérez Rastelli, J. A hybrid planning approach based on MPC and parametric curves for overtaking maneuvers. Sensors 2021, 21, 595. [Google Scholar] [CrossRef]
- Shackel, S.C.; Parkin, J. Influence of road markings, lane widths and driver behaviour on proximity and speed of vehicles overtaking cyclists. Accid. Anal. Prev. 2014, 73, 100–108. [Google Scholar] [CrossRef]
- Bentaleb, K.; Lakouari, N.; Marzoug, R.; Ez-Zahraouy, H.; Benyoussef, A. Simulation study of traffic car accidents in single-lane highway. Phys. A Stat. Mech. Appl. 2014, 413, 473–480. [Google Scholar] [CrossRef]
- Tan, H.S.; Guldner, J.; Patwardhan, S.; Chen, C.; Bougler, B. Development of an automated steering vehicle based on roadway magnets-a case study of mechatronic system design. IEEE/ASME Trans. Mechatron. 1999, 4, 258–272. [Google Scholar]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2010, 368, 4585–4605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Shun-Ichi, A.; Imura, J.I. Control of Vehicular Traffic at an Intersection Using a Cyber-Physical Multiagent Framework. IEEE Trans. Ind. Inform. 2021, 17, 6230–6240. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamada, Y.; Bakibillah, A.S.M.; Hashikura, K.; Kamal, M.A.S.; Yamada, K. Autonomous Vehicle Overtaking: Modeling and an Optimal Trajectory Generation Scheme. Sustainability 2022, 14, 1807. https://doi.org/10.3390/su14031807
Yamada Y, Bakibillah ASM, Hashikura K, Kamal MAS, Yamada K. Autonomous Vehicle Overtaking: Modeling and an Optimal Trajectory Generation Scheme. Sustainability. 2022; 14(3):1807. https://doi.org/10.3390/su14031807
Chicago/Turabian StyleYamada, Yu, Abu Saleh Md Bakibillah, Kotaro Hashikura, Md Abdus Samad Kamal, and Kou Yamada. 2022. "Autonomous Vehicle Overtaking: Modeling and an Optimal Trajectory Generation Scheme" Sustainability 14, no. 3: 1807. https://doi.org/10.3390/su14031807
APA StyleYamada, Y., Bakibillah, A. S. M., Hashikura, K., Kamal, M. A. S., & Yamada, K. (2022). Autonomous Vehicle Overtaking: Modeling and an Optimal Trajectory Generation Scheme. Sustainability, 14(3), 1807. https://doi.org/10.3390/su14031807