
Attention Pedestrians Ahead: Evaluating User Acceptance and Perceptions of a Cooperative Intelligent Transportation System-Warning System for Pedestrians

 , , , ,
, , , ,
Abstract
:1. Introduction
1.1. Measuring Driver Acceptance
1.2. Statement of the Problem
1.3. Purpose of the Research
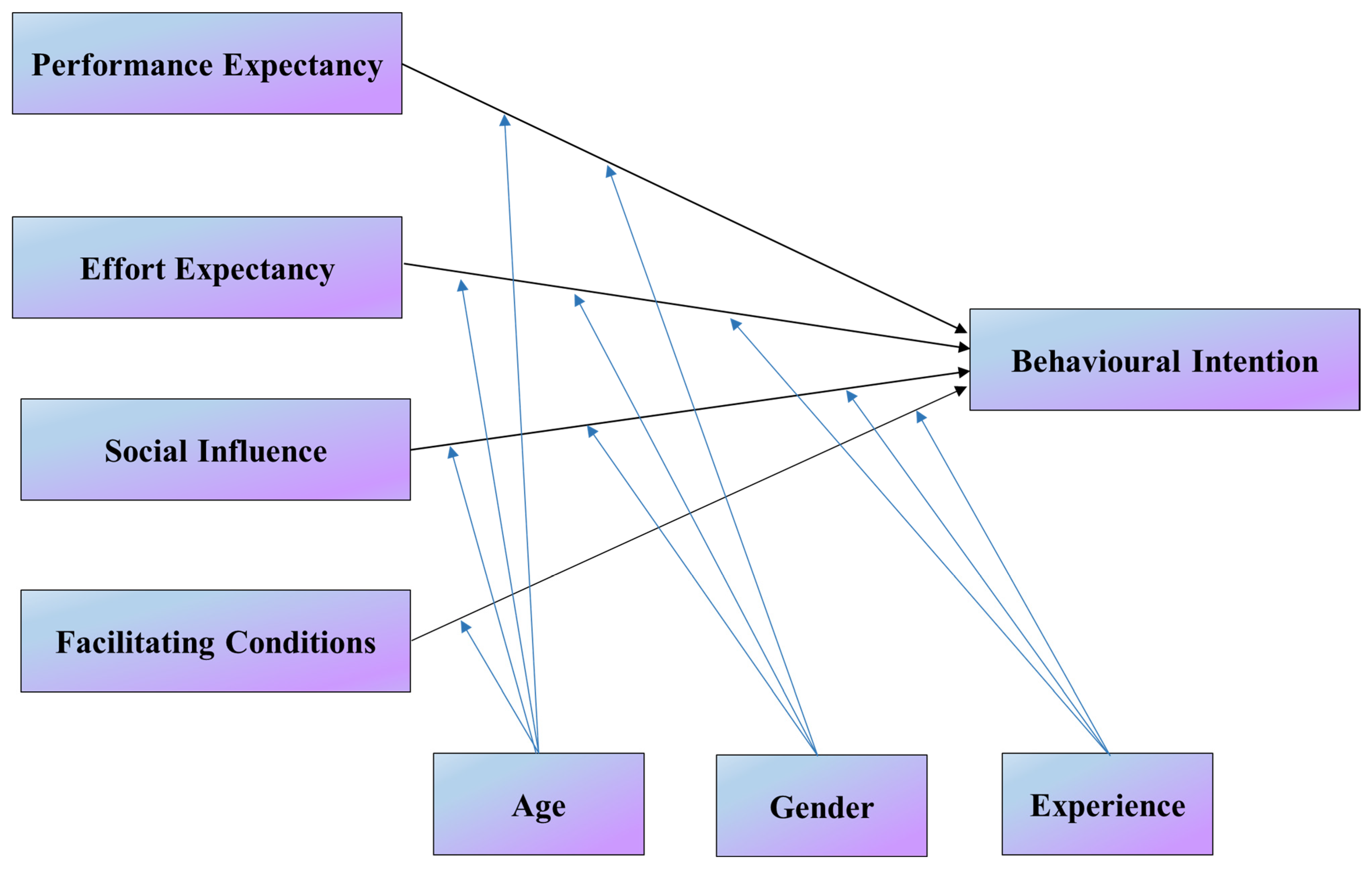
- To examine the effect of UTAUT constructs of performance expectancy, effort expectancy, social influence, and facilitating conditions on users’ behavioural intention to use WSP;
- To examine user attitudes towards the different types of WSP-HMIs.
2. Materials and Methods
2.1. Design of WSP-HMIs
2.2. Measurements
2.3. Participants and Research Procedure
2.4. Data processing and Analysis
3. Results
3.1. Behavioural Intentions towards WSP-HMIs
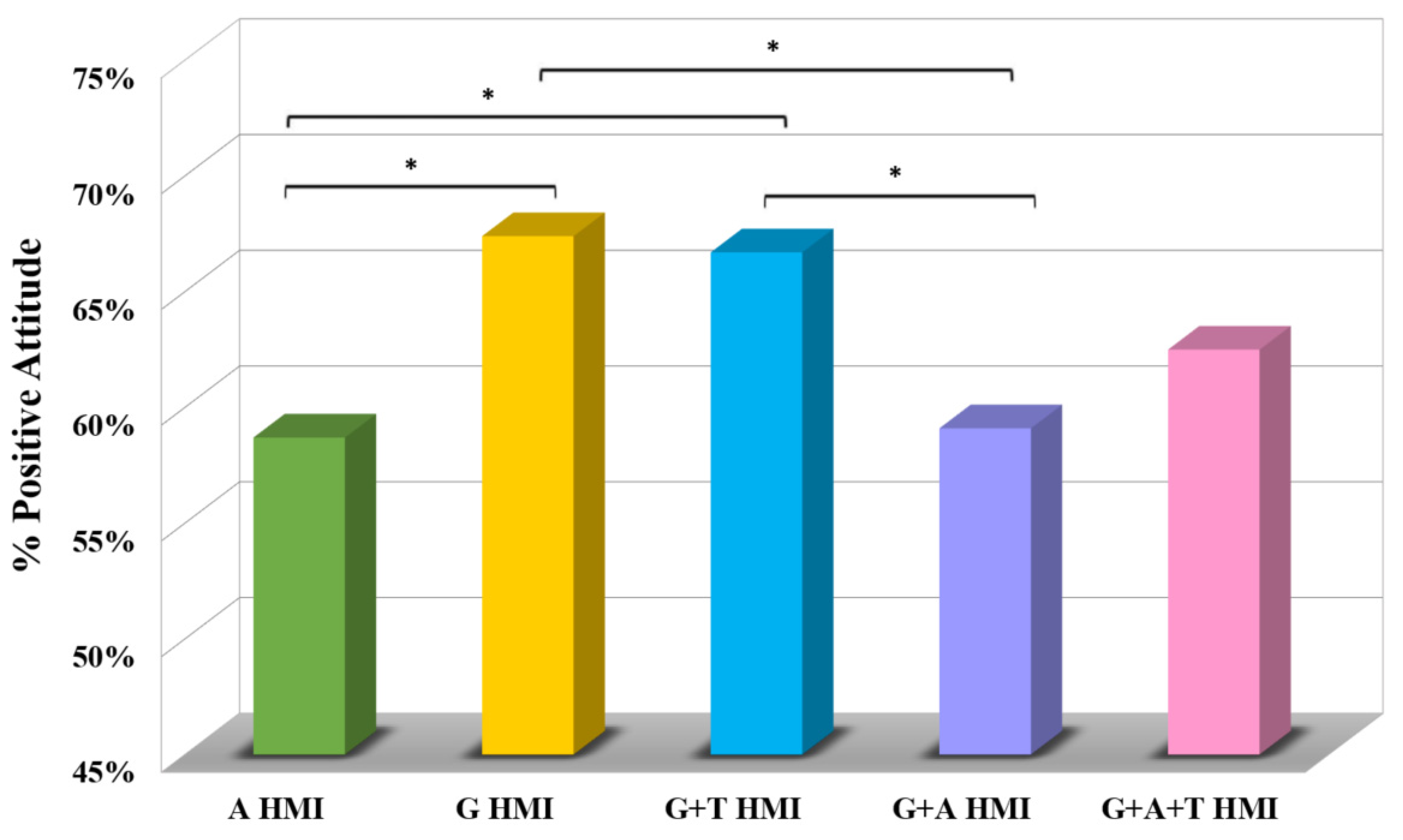
3.2. Attitudes towards Different Types of WSP-HMIs
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sjoberg, K.; Andres, P.; Buburuzan, T.; Brakemeier, A. Cooperative intelligent transport systems in europe: Current deployment status and outlook. IEEE Veh. Technol. Mag. 2017, 12, 89–97. [Google Scholar] [CrossRef]
- Edwards, S.; Hill, G.; Goodman, P.; Blythe, P.; Mitchell, P.; Huebner, Y. Quantifying the impact of a real world cooperative-ITS deployment across multiple cities. Transp. Res. Part A Policy Pract. 2018, 115, 102–113. [Google Scholar] [CrossRef] [Green Version]
- Beckwith, D.M.; Hunter-Zaworski, K.M. Passive pedestrian detection at unsignalized crossings. Transp. Res. Rec. 1998, 1636, 96–103. [Google Scholar] [CrossRef]
- Hakkert, A.S.; Gitelman, V.; Ben-Shabat, E. An evaluation of crosswalk warning systems: Effects on pedestrian and vehicle behaviour. Transp. Res. Part F Traffic Psychol. Behav. 2002, 5, 275–292. [Google Scholar] [CrossRef]
- Høye, A.; Laureshyn, A. SeeMe at the crosswalk: Before-after study of a pedestrian crosswalk warning system. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 723–733. [Google Scholar] [CrossRef]
- Liu, Y.-C.; Jhuang, J.-W. Effects of in-vehicle warning information displays with or without spatial compatibility on driving behaviors and response performance. Appl Ergon. 2012, 43, 679–686. [Google Scholar] [CrossRef]
- Harvey, C.; Stanton, N.A.; Pickering, C.A.; McDonald, M.; Zheng, P. In-vehicle information systems to meet the needs of drivers. Intl. J. Hum. Comput. Interact. 2011, 27, 505–522. [Google Scholar] [CrossRef]
- Chen, W.-H.; Lin, C.-Y.; Doong, J.-L. Effects of interface workload of in-vehicle information systems on driving safety. Transp. Res. Rec. 2005, 1937, 73–78. [Google Scholar] [CrossRef]
- Payre, W.; Diels, C. Designing in-vehicle signs for connected vehicle features: Does appropriateness guarantee comprehension? Appl Ergon. 2019, 80, 102–110. [Google Scholar] [CrossRef]
- Klauer, S.G.; Dingus, T.A.; Neale, V.L.; Sudweeks, J.D.; Ramsey, D.J. The Impact of Driver Inattention on Near-Crash/Crash Risk: An Analysis Using the 100-Car Naturalistic Driving Study Data; National Highway Traffic Safety Administration: Washington, DC, USA, 2006; Report No. DOT HS 810 594. [Google Scholar]
- Li, S.; Blythe, P.; Guo, W.; Namdeo, A.; Edwards, S.; Goodman, P.; Hill, G. Evaluation of the effects of age-friendly human-machine interfaces on the driver’s takeover performance in highly automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2019, 67, 78–100. [Google Scholar] [CrossRef]
- Emmerson, C.; Guo, W.; Blythe, P.; Namdeo, A.; Edwards, S. Fork in the road: In-vehicle navigation systems and older drivers. Transp. Res. Part F Traffic Psychol. Behav. 2013, 21, 173–180. [Google Scholar] [CrossRef] [Green Version]
- Vaezipour, A.; Rakotonirainy, A.; Haworth, N.; Delhomme, P. Enhancing eco-safe driving behaviour through the use of in-vehicle human-machine interface: A qualitative study. Transp. Res. Part A Policy Pract. 2017, 100, 247–263. [Google Scholar] [CrossRef]
- Li, S.; Blythe, P.; Guo, W.; Namdeo, A. Investigation of older drivers’ requirements of the human-machine interaction in highly automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 546–563. [Google Scholar] [CrossRef]
- François, M.; Osiurak, F.; Fort, A.; Crave, P.; Navarro, J. Automotive HMI design and participatory user involvement: Review and perspectives. Ergonomics 2017, 60, 541–552. [Google Scholar] [CrossRef] [PubMed]
- Adell, E. Acceptance of driver support systems. In Proceedings of the European conference on human centred design for intelligent transport systems, Humanist VCE, Berlin, Germany, 29–30 April 2010. [Google Scholar]
- Rahman, M.M.; Lesch, M.F.; Horrey, W.J.; Strawderman, L. Assessing the utility of TAM, TPB, and UTAUT for advanced driver assistance systems. Accid Anal. Prev. 2017, 108, 361–373. [Google Scholar] [CrossRef] [PubMed]
- Davis, F.D. Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef] [Green Version]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User acceptance of information technology: Toward a unified view. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef] [Green Version]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention, and Behavior: An Introduction to Theory and Research. Reading; Addison-Wesley: Boston, MA, USA, 1975. [Google Scholar]
- Cimperman, M.; Brenčič, M.M.; Trkman, P. Analyzing older users’ home telehealth services acceptance behavior—Applying an Extended UTAUT model. Int. J. Med. Inf. 2016, 90, 22–31. [Google Scholar] [CrossRef] [Green Version]
- Šumak, B.; Šorgo, A. The acceptance and use of interactive whiteboards among teachers: Differences in UTAUT determinants between pre-and post-adopters. Comput Human Behav. 2016, 64, 602–620. [Google Scholar] [CrossRef]
- Zhou, T.; Lu, Y.; Wang, B. Integrating TTF and UTAUT to explain mobile banking user adoption. Comput. Hum. Behav. 2010, 26, 760–767. [Google Scholar] [CrossRef]
- Alawadhi, S.; Morris, A. (Eds.) The Use of the UTAUT Model in the Adoption of E-government Services in Kuwait. In Proceedings of the 41st Annual Hawaii International Conference on System Sciences (HICSS 2008), Waikoloa, HI, USA, 7–10 January 2008. [Google Scholar]
- Henzler, M.; Boller, A.; Buchholz, M.; Dietmeyer, K. Are truck drivers ready to save fuel? The objective and subjective effectiveness of an ecological driver assistance system. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015. [Google Scholar]
- Huang, H.; Ronald, H.; Charles, Z.; Marsha, N. An Evaluation of the Lightguard Pedestrian Crosswalk Warning System; Florida Department of Transportation Safety Office: Tallahassee, FL, USA, 1999.
- Ka, D.; Lee, D.; Kim, S.; Yeo, H. Study on the framework of intersection pedestrian collision warning system considering pedestrian characteristics. Transp. Res. Rec. 2019, 2673, 747–758. [Google Scholar] [CrossRef]
- Vladyko, A.; Elagin, V.; Rogozinsky, G. Method of early pedestrian warning in developing intelligent transportation system infrastructure. Transp. Res. Procedia 2020, 50, 708–715. [Google Scholar] [CrossRef]
- Gavrila, D.M.; Giebel, J.; Munder, S. Vision-based pedestrian detection: The protector system. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004. [Google Scholar] [CrossRef]
- Gavrila, D.M. Sensor-based pedestrian protection. IEEE Intell Syst. 2001, 16, 77–81. [Google Scholar] [CrossRef]
- Liu, Y.-C. Comparative study of the effects of auditory, visual and multimodality displays on drivers’ performance in advanced traveller information systems. Ergonomics 2001, 44, 425–442. [Google Scholar] [CrossRef] [PubMed]
- Sodnik, J.; Dicke, C.; Tomažič, S.; Billinghurst, M. A user study of auditory versus visual interfaces for use while driving. Int. J. Hum. Comput. Stud. 2008, 66, 318–332. [Google Scholar] [CrossRef]
- Weinberg, G.; Harsham, B.; Medenica, Z. Evaluating the usability of a head-up display for selection from choice lists in cars. In Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Salzburg, Austria, 30 November–2 December 2011. [Google Scholar]
- Jakus, G.; Dicke, C.; Sodnik, J. A user study of auditory, head-up and multi-modal displays in vehicles. Appl. Ergon. 2015, 46, 184–192. [Google Scholar] [CrossRef]
- Edwards, S.; Emmerson, C.; Namdeo, A.; Blythe, P.; Guo, W. Optimising landmark-based route guidance for older drivers. Transp. Res. Part F Traffic Psychol. Behav. 2016, 43, 225–237. [Google Scholar] [CrossRef] [Green Version]
- Madigan, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 55–64. [Google Scholar] [CrossRef]
- Nunnally, J.C. Psychometric Theory; McGraw-Hill: New York, NY, USA, 1978. [Google Scholar]
- Aiken, L.S.; West, S.G.; Reno, R.R. Multiple Regression: Testing and Interpreting Interactions; Sage: London, UK; Newbury Park, CA, USA, 1991. [Google Scholar]
- Field, A. Discovering Statistics Using IBM SPSS Statistics; Sage: London, UK, 2013. [Google Scholar]
- Osswald, S.; Wurhofer, D.; Trösterer, S.; Beck, E.; Tscheligi, M. Predicting information technology usage in the car: Towards a car technology acceptance model. In Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Portsmouth, New Hampshire, 17–19 October 2012. [Google Scholar]
- Mollenhauer, M.A.; Lee, J.; Cho, K.; Hulse, M.C.; Dingus, T.A. The effects of sensory modality and information priority on in-vehicle signing and information systems. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Los Angeles, CA, USA, 1 October 1994; SAGE Publications Sage: Los Angeles, CA, USA, 1994. [Google Scholar]
- Politis, I.; Brewster, S.; Pollick, F. Evaluating multimodal driver displays of varying urgency. In Proceedings of the 5th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Eindhoven, The Netherlands, 28–30 October 2013; ACM Press: New York, NY, USA, 2013. [Google Scholar]
- Li, S.; Blythe, P.; Zhang, Y.; Edwards, S.; Xing, J.; Guo, W.; Ji, Y.; Goodman, P.; Namdeo, A. Should older people be considered a homogeneous group when interacting with level 3 automated vehicles? Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 446–465. [Google Scholar] [CrossRef]
- Li, S.; Blythe, P.; Guo, W.; Namdeo, A. Investigation of older driver’s takeover performance in highly automated vehicles in adverse weather conditions. IET. Intell. Transp. Syst. 2018, 12, 1157–1165. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Blythe, P.; Guo, W.; Namdeo, A. Investigating the effects of age and disengagement in driving on driver’s takeover control performance in highly automated vehicles. Transp. Plan. Technol. 2019, 42, 470–497. [Google Scholar] [CrossRef]
- Li, S.; Blythe, P.; Edwards, S.; Goodman, P.; Hill, G. Investigation of the influence of multitasking on drivers’ takeover performance in highly automated vehicles. In Proceedings of the 26th Intelligent Transport Systems World Congress, Singapore, 21–25 October 2019. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| HMI Modality | Type of HMI | Visual Element | Auditory Element | Description |
|---|---|---|---|---|
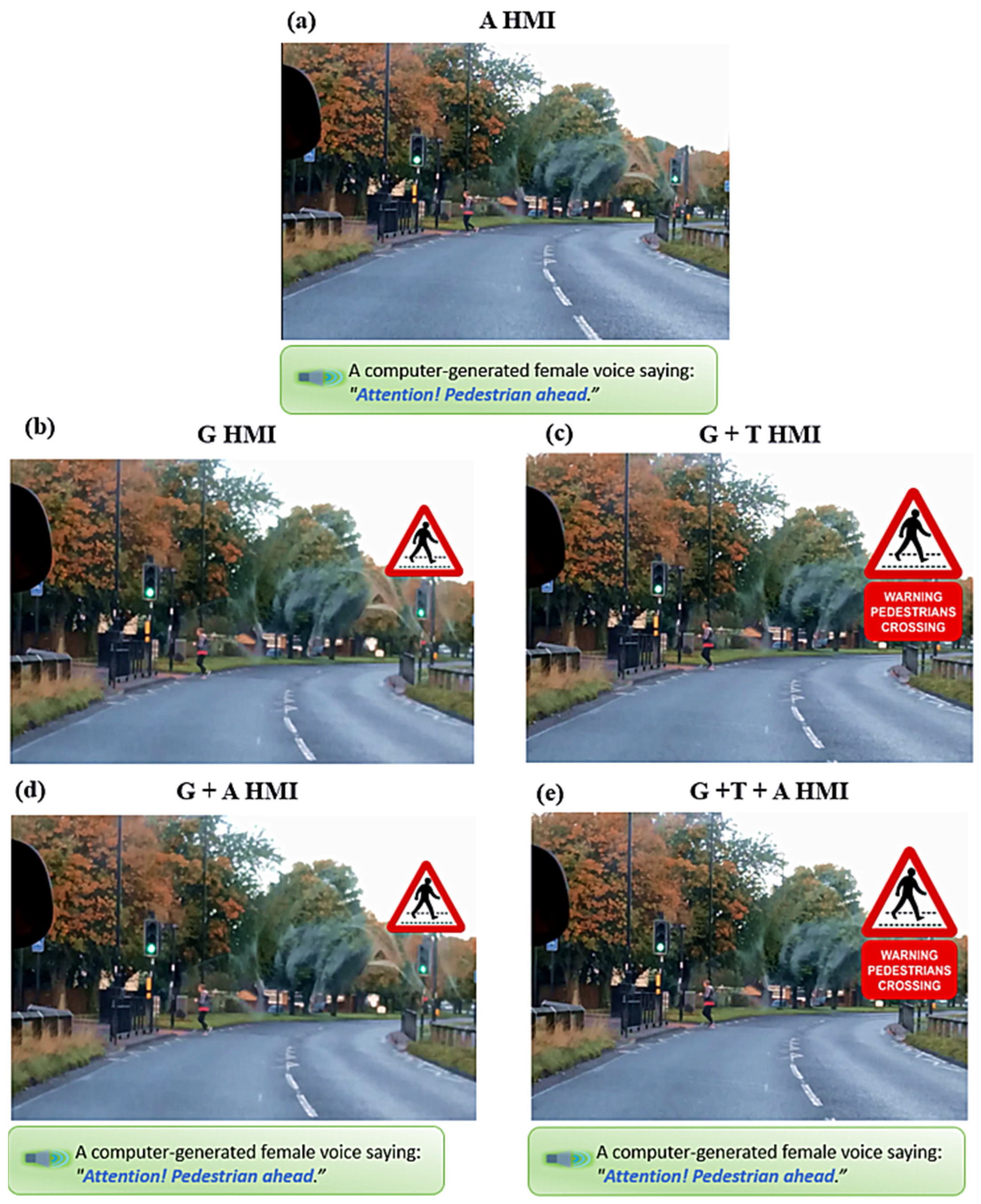
| Auditory HMI (A HMI) | Single-modal | N/A | Computer Generated Voice Message (2000 Hz, 75 dB) | First-view driving footage integrated with a warning sound. |
| Graphical Sign HMI (G HMI) | Single-modal | Red Graphical Sign | N/A | First-view driving footage integrated with a pedestrian crossing warning sign. |
| Graphical Sign + Textual HMI (G + T HMI) | Single-modal | Red Graphical Sign + Text | N/A | First-view driving footage integrated with a pedestrian crossing warning sign and a warning legend below the sign. |
| Graphical Sign + Auditory HMI (G + A HMI) | Multi-modal | Red Graphic Sign | Computer Generated Voice Message (2000 Hz, 75 dB) | First-view driving footage integrated with a pedestrian crossing warning sign and a warning sound. |
| Graphical Sign+ Textual + Auditory HMI (G + T + A HMI) | Multi-modal | Red Graphic Sign + Text | Computer Generated Voice Message (2000 Hz, 75 dB) | First-view driving footage integrated with a pedestrian crossing warning sign, a warning legend below the sign, and a warning sound. |
| Construct a | Adopted Item b |
|---|---|
| Performance expectancy (PE): the degree to which individuals believe that using WSP will help them increase their driving performance | |
| PE1 | I would find the system useful in my driving. |
| PE2 | Using the system would enable me to react to unsafe driving conditions more quickly. |
| PE3 | Using the system would improve my driving performance. |
| PE4 | Using the system, my risk of being involved in an accident would decrease. |
| Effort expectancy (EE): the degree of ease associated with the use of a WSP | |
| EE1 | I found the system to be clear and understandable. |
| EE2 | I would quickly get used to operating the system. |
| EE3 | I would find the system difficult to use. |
| EE4 | I would find the system a distraction whilst driving. |
| Social influence (SI): the degree to which individuals perceive that important others (e.g., family, friends, and colleagues) believe that they should use WSP | |
| SI1 | I would use the system if it was recommended by a trusted friend or family member. |
| SI2 | I would use the system if it was recommended by a trusted agency (e.g., police or motoring authority such as the AA). |
| SI3 | I would use the system if it was recommended by an authority (e.g., by your insurance company). |
| SI4 | In general, the authority would support the use of the system. |
| Facilitating conditions (FCs): technical support for using a WSP system | |
| FC1 | I feel I have the understanding necessary to use the system. |
| FC2 | I believe guidance will be available to me when deciding whether to use the system. |
| FC3 | I believe specific persons (or a group) will be available for assistance with system difficulties. |
| Behavioural intentions (BIs) | |
| BI1 | If my car is equipped with a similar system, I predict that I would use the system when driving. |
| BI2 | Assuming that the system is available, I intend to use the system regularly when I am driving. |
| BI3 | Assuming that I had access to the system, I predict that I would use it in the future. |
| Construct | Item | Factor Loading | Cronbach’s Alpha α |
|---|---|---|---|
| Performance expectancy (PE) | PE1 | 0.817 | 0.933 |
| PE2 | 0.644 | ||
| PE3 | 0.921 | ||
| PE4 | 0.943 | ||
| Effort expectancy (EE) | EE1 | 0.789 | 0.708 |
| EE2 | 0.669 | ||
| EE3 | 0.978 | ||
| EE4 | 0.723 | ||
| Social influence (SI) | SI1 | 0.464 | 0.896 |
| SI2 | 0.615 | ||
| SI3 | 0.605 | ||
| SI4 | 0.681 | ||
| Facilitating conditions (FCs) | FC1 | 0.878 | 0.889 |
| FC2 | 0.859 | ||
| FC3 | 0.836 | ||
| Behavioural intentions (BIs) | BI1 | 0.822 | 0.944 |
| BI2 | 0.926 | ||
| BI3 | 0.818 |
| Factors | PE | EE | SI | FC | BI |
|---|---|---|---|---|---|
| PE | 1 | 0.657 *** | 0.777 *** | 0.621 *** | 0.866 *** |
| EE | 0.657 *** | 1 | 0.702 *** | 0.594 *** | 0.695 *** |
| SI | 0.777 *** | 0.702 *** | 1 | 0.700 *** | 0.767 *** |
| FC | 0.621 *** | 0.594 *** | 0.700 *** | 1 | 0.632 *** |
| BI | 0.866 *** | 0.695 *** | 0.767 *** | 0.632 *** | 1 |
| Step | Independent Variable | Step1 β | Step2 β | ||
|---|---|---|---|---|---|
| 1 | Performance expectancy | 0.626 *** | 0.648 *** | 0.788 | 0.788 |
| Effort expectancy | 0.158 * | 0.141 * | |||
| Social influence | 0.128 | 0.107 | |||
| Facilitating conditions | 0.060 | 0.071 | |||
| 2 | Age | −0.020 | 0.777 | 0.001 | |
| Gender | 0.010 | ||||
| Experience | −0.040 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Li, S.; Blythe, P.; Edwards, S.; Guo, W.; Ji, Y.; Xing, J.; Goodman, P.; Hill, G. Attention Pedestrians Ahead: Evaluating User Acceptance and Perceptions of a Cooperative Intelligent Transportation System-Warning System for Pedestrians. Sustainability 2022, 14, 2787. https://doi.org/10.3390/su14052787
Zhang Y, Li S, Blythe P, Edwards S, Guo W, Ji Y, Xing J, Goodman P, Hill G. Attention Pedestrians Ahead: Evaluating User Acceptance and Perceptions of a Cooperative Intelligent Transportation System-Warning System for Pedestrians. Sustainability. 2022; 14(5):2787. https://doi.org/10.3390/su14052787
Chicago/Turabian StyleZhang, Yanghanzi, Shuo Li, Philip Blythe, Simon Edwards, Weihong Guo, Yanjie Ji, Jin Xing, Paul Goodman, and Graeme Hill. 2022. "Attention Pedestrians Ahead: Evaluating User Acceptance and Perceptions of a Cooperative Intelligent Transportation System-Warning System for Pedestrians" Sustainability 14, no. 5: 2787. https://doi.org/10.3390/su14052787