
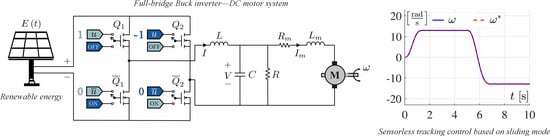
Sensorless Tracking Control Based on Sliding Mode for the “Full-Bridge Buck Inverter–DC Motor” System Fed by PV Panel

 , , , ,
, , , ,  , , and
, , and
Abstract
1. Introduction
1.1. Unidirectional Systems
1.1.1. DC/DC Buck Converter Driven DC Motor
1.1.2. Other DC/DC Converter Topologies for Driving a DC Motor
1.2. Bidirectional Systems
1.2.1. Bidirectional DC/DC Buck Converter Driven DC Motor
1.2.2. Other Bidirectional DC/DC Converter Topologies for Driving a DC Motor
1.3. Discussion of Related Works
1.4. Contribution
- i.
- For the first time in the literature, a sensorless tracking SMC is proposed for the full-bridge Buck inverter–DC motor system, which considers the dynamics of the power supply in the control design. The performance of the SMC is verified in Section 4 for two reference trajectories, when the feeding voltage is time-varying and when it is generated through a PV panel considering three different solar irradiance shapes.
- ii.
- The power supply operating range is determined in Section 5.1. This allows one to determine the minimum voltage magnitude that the power supply must provide in order to achieve the control task. Results of the system in closed-loop with different PV panels that satisfy the power supply operating range are presented for this purpose.
- iii.
- A performance comparison between the proposed SMC and an ETEDPOF control is conducted in Section 5.2. This demonstrates the superiority of the proposed SMC in terms of trajectory tracking performance.
- iv.
- A study related to current ripple and trajectory tracking assessment is presented in Section 5.3. This establishes the dependency between the SMC implementation frequency and the current ripple. Additionally, it is inferred that as the current ripple decreases, the performance of the control task improves.
1.5. Work Organization
2. Full-Bridge Buck Inverter–DC Motor System
3. Sensorless Tracking Control Based on Sliding Mode Design
3.1. Direct Control
3.2. Indirect Control
4. Simulation Results 1: Closed-Loop System Performance
- A time-varying supply voltage from a PV panel.
- Three different forms of solar irradiation (constant, sinusoidal, and stochastic).
- Two different reference trajectories (one of Bézier type and the other of sinusoidal type).
- Sliding mode control. The SMC scheme is implemented in this block in Simulink. The reference trajectory is defined by the block labeled desired velocity. This desired trajectory is used to calculate the reference variables , , and using Equation (5). On the other hand, the control block requires the measurement of the current I and the reference variable , with which the control signal u is determined in accordance with Equation (21). Finally, through the control implementation block, the control signal is established for the transistors , and , based on the duty cycles shown in Figure 1.
- Full-bridge Buck inverter–DC motor circuit. This block corresponds to the Matlab-Simulink development of the full-bridge Buck inverter–DC motor system shown in Figure 1. The power source is a Topsun TS-S410 PV panel that is subjected to time-varying solar irradiation , which produces a time-varying power supply voltage . In this electromechanical circuit, the variables I, V, , and are measured. While the parameter values associated with the Buck converter and DC motor used to simulate the closed-loop system are presented in (8) and (9), respectively.
4.1. Simulation Test 1
4.2. Simulation Test 2
4.3. Simulation Test 3
4.4. Simulation Test 4
4.5. Simulation Test 5
4.6. Simulation Test 6
4.7. Comments of the Simulation Results
5. Simulation Results 2: System Performance with Different PV Panels, Comparison of the Proposed Control versus an ETEDPOF Control, and Considerations on the SMC Switching Frequency
5.1. Power Supply Operating Range Analysis
5.2. Comparison of the SMC versus a Sensorless ETEDPOF Control
5.3. Dependency of f in the SMC: Evaluation of Current Ripple and Trajectory Tracking Performance
5.4. Comments on the Simulation Results
- Power supply operating range analysis. After analyzing the simulation results obtained in Section 5.1 and presented in Figure 10, Figure 11, Figure 12, Figure 13, Figure 14 and Figure 15, it is demonstrated that the system exhibits good performance even when using PV panels with different technical characteristics. This is due to the fact that the panels used in these simulations consistently satisfy condition (28). It is worth noting that despite the sudden variations in the incident solar irradiation on the panel, the good performance of the control remains.
- Comparison of the SMC versus a sensorless ETEDPOF control. In Figure 16, Figure 17 and Figure 18 presented in Section 5.2, the superiority of the proposed SMC is evident. This is because the tracking errors associated with the variables I (see Figure 16c, Figure 17c, and Figure 18c) and (see Figure 16d, Figure 17d, and Figure 18d) are smaller in magnitude compared to the errors obtained via the ETEDPOF control.
- Dependency of f in the SMC: Current Ripple and Trajectory Tracking Task Assessment. In Section 5.3, after visually evaluating the results presented in Figure 19, it can be concluded that the performance of the SMC is directly dependent on its switching frequency. This is evident as a higher frequency leads to a decrease in the current ripple present in I and an improvement in the tracking performance of , i.e., if ideally , then .
6. Conclusions
- The restriction relating the desired angular velocity to the minimum required magnitude of to successfully perform the control task was found.
- It was demonstrated that the performance of the proposed SMC is better than a control based on the ETEDPOF methodology.
- It was shown that as the current ripple in I decreases, the trajectory tracking task is improved. This is achieved by increasing the frequency in the SMC implementation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DC | Direct current |
| PV | Photovoltaic Panel |
| PI | Proportional-integral |
| LQR | Linear quadratic regulator |
| SMC | Sliding mode control |
| PID | Proportional-integral-derivative |
| dPSO | Dynamic particle swarm optimization |
| ETEDPOF | Exact tracking error dynamics passive output feedback |
| PWM | Pulse width modulation |
| MIMO | Multiple-input multiple-output |
Notation
| Power supply | |
| , | Transistors |
| , | Complementary transistors |
| Low pass filter composed by L and C | |
| V | Capacitor voltage |
| C | Capacitor |
| R | Resistor |
| I | Converter inductor current |
| L | Converter inductor |
| Armature current | |
| Armature resistor | |
| Armature inductor | |
| J | Moment of inertia |
| b | Viscous friction coefficient |
| Torque constant | |
| back-electromotive force constant | |
| Angular velocity | |
| u | Transistor’s position |
| Complementary transistor’s position | |
| Average duty cycle | |
| x | State vector |
| , , , , | System reference trajectories and reference input |
| Sliding surface | |
| Equivalent control | |
| Tracking errors | |
| Candidate Lyapunov function | |
| f | Transistor switching frequency |
| Maximum power | |
| Voltage at maximum power | |
| Current at maximum power | |
| Open circuit voltage | |
| Short circuit current | |
| Irradiation | |
| , , , | Constant angular velocities for interpolating the Bézier polynomials |
| , , , | Initial and final times for interpolating the Bézier polynomials |
| Bézier polynomials | |
| Auxiliary variables for the definition of the Bézier polynomials | |
| ETEDPOF control gain | |
| ETEDPOF control converter inductor current | |
| SMC tracking error associated with converter inductor current | |
| SMC tracking error associated with angular velocity | |
| ETEDPOF tracking error associated with converter inductor current | |
| ETEDPOF tracking error associated with angular velocity | |
| Converter inductor current when a 50 kHz simulation frecuency is considered | |
| Angular velocity when a 50 kHz simulation frecuency is considered | |
| Angular velocity when a 250 kHz simulation frecuency is considered | |
| Angular velocity when a 250 kHz simulation frecuency is considered | |
| Converter inductor current when a 500 kHz simulation frecuency is considered | |
| Angular velocity when a 500 kHz simulation frecuency is considered |
References
- Obaideen, K.; Olabi, A.G.; Al Swailmeen, Y.; Shehata, N.; Abdelkareem, M.A.; Alami, A.H.; Rodriguez, C.; Sayed, E.T. Solar energy: Applications, trends analysis, bibliometric analysis and research contribution to sustainable development goals (SDGs). Sustainability 2023, 15, 1418. [Google Scholar] [CrossRef]
- Elkholy, M.H.; Senjyu, T.; Lotfy, M.E.; Elgarhy, A.; Ali, N.S.; Gaafar, T.S. Design and implementation of a real-time smart home management system considering energy saving. Sustainability 2022, 14, 13840. [Google Scholar] [CrossRef]
- Zainol Abidin, M.A.; Mahyuddin, M.N.; Mohd Zainuri, M.A.A. Solar photovoltaic architecture and agronomic management in agrivoltaic system: A review. Sustainability 2021, 13, 7846. [Google Scholar] [CrossRef]
- Lyshevski, S.E. Electromechanical Systems, Electric Machines and Applied Mechatronics; CRC Press: Boca Raton, FL, USA, 2000; ISBN 0-8493-2275-8. [Google Scholar]
- Ahmad, M.A.; Ismail, R.M.T.R.; Ramli, M.S. Control strategy of Buck converter driven DC motor: A comparative assessment. Austral. J. Basic Appl. Sci. 2010, 4, 4893–4903. [Google Scholar]
- Rigatos, G.; Siano, P.; Wira, P.; Sayed-Mouchaweh, M. Control of DC–DC converter and DC motor dynamics using differential flatness theory. Intell. Ind. Syst. 2016, 2, 371–380. [Google Scholar] [CrossRef]
- Rigatos, G.; Siano, P.; Ademi, S.; Wira, P. Flatness-based control of DC-DC converters implemented in successive loops. Electr. Power Compon. Syst. 2018, 46, 673–687. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Roldán-Caballero, A.; Hernández-Márquez, E.; García-Sánchez, J.R.; Marciano-Melchor, M.; Hernández-Guzmán, V.M.; Silva-Ortigoza, G. Robust flatness tracking control for the “DC/DC Buck converter–DC motor” system: Renewable energy-based power supply. Complexity 2021, 2021, 2158782. [Google Scholar] [CrossRef]
- Bingöl, O.; Paçaci, S. A virtual laboratory for neural network controlled DC motors based on a DC-DC Buck converter. Int. J. Eng. Educ. 2012, 28, 713–723. [Google Scholar]
- Sira-Ramírez, H.; Oliver-Salazar, M.A. On the robust control of Buck-converter DC-motor combinations. IEEE Trans. Power Electron. 2013, 28, 3912–3922. [Google Scholar] [CrossRef]
- Hoyos, F.E.; Rincón, A.; Taborda, J.A.; Toro, N.; Angulo, F. Adaptive quasi-sliding mode control for permanent magnet DC motor. Math. Probl. Eng. 2013, 2013, 693685. [Google Scholar] [CrossRef]
- Hoyos Velasco, F.E.; Candelo-Becerra, J.E.; Rincón Santamaria, A. Dynamic analysis of a permanent magnet DC motor using a Buck converter controlled by ZAD-FPIC. Energies 2018, 11, 3388. [Google Scholar] [CrossRef]
- Hoyos, F.E.; Candelo-Becerra, J.E.; Hoyos Velasco, C.I. Application of zero average dynamics and fixed point induction control techniques to control the speed of a DC motor with a Buck converter. Appl. Sci. 2020, 10, 1807. [Google Scholar] [CrossRef]
- Hoyos, F.E.; Candelo-Becerra, J.E.; Rincón, A. Zero average dynamic controller for speed control of DC motor. Appl. Sci. 2021, 11, 5608. [Google Scholar] [CrossRef]
- Yang, J.; Wu, H.; Hu, L.; Li, S. Robust predictive speed regulation of converter-driven DC motors via a discrete-time reduced-order GPIO. IEEE Trans. Ind. Electron. 2019, 66, 7893–7903. [Google Scholar] [CrossRef]
- Stanković, M.R.; Madonski, R.; Shao, S.; Mikluc, D. On dealing with harmonic uncertainties in the class of active disturbance rejection controllers. Int. J. Control 2021, 94, 2795–2810. [Google Scholar] [CrossRef]
- Madonski, R.; Łakomy, K.; Stankovic, M.; Shao, S.; Yang, J.; Li, S. Robust converter-fed motor control based on active rejection of multiple disturbances. Control Eng. Pract. 2021, 107, 104696. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, J.; Li, S. A model-based unmatched disturbance rejection control approach for speed regulation of a converter-driven DC motor using output-feedback. IEEE-CAA J. Autom. Sin. 2022, 9, 365–376. [Google Scholar] [CrossRef]
- Guerrero-Ramírez, E.; Martínez-Barbosa, A.; Guzmán-Ramírez, E.; Barahona-Ávalos, J.L. Design methodology for digital active disturbance rejection control of the DC motor drive. E-Prime-Adv. Electr. Eng. Electron. Energy 2022, 2, 100050. [Google Scholar]
- Guerrero-Ramírez, E.; Martínez-Barbosa, A.; Contreras-Ordaz, M.A.; Guerrero-Ramírez, G.; Guzman-Ramirez, E.; Barahona-Ávalos, J.L.; Adam-Medina, M. DC motor drive powered by solar photovoltaic energy: An FPGA-based active disturbance rejection control approach. Energies 2022, 15, 6595. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Hernández-Guzmán, V.M.; Antonio-Cruz, M.; Muñoz-Carrillo, D. DC/DC Buck power converter as a smooth starter for a DC motor based on a hierarchical control. IEEE Trans. Power Electron. 2015, 30, 1076–1084. [Google Scholar] [CrossRef]
- Wei, F.; Yang, P.; Li, W. Robust adaptive control of DC motor system fed by Buck converter. Int. J. Control Autom. 2014, 7, 179–190. [Google Scholar] [CrossRef]
- Xiao, X.; Lv, J.; Chang, Y.; Chen, J.; He, H. Adaptive sliding mode control integrating with RBFNN for proton exchange membrane fuel cell power conditioning. Appl. Sci. 2022, 12, 3132. [Google Scholar] [CrossRef]
- Rauf, A.; Li, S.; Madonski, R.; Yang, J. Continuous dynamic sliding mode control of converter-fed DC motor system with high order mismatched disturbance compensation. Trans. Inst. Meas. Control 2020, 42, 2812–2821. [Google Scholar] [CrossRef]
- Rauf, A.; Zafran, M.; Khan, A.; Tariq, A.R. Finite-time nonsingular terminal sliding mode control of converter-driven DC motor system subject to unmatched disturbances. Int. Trans. Elect. Energy Syst. 2021, 31, e13070. [Google Scholar] [CrossRef]
- Ravikumar, D.; Srinivasan, G.K. Implementation of higher order sliding mode control of DC–DC Buck converter fed permanent magnet DC motor with improved performance. Automatika 2022, 64, 162–177. [Google Scholar] [CrossRef]
- Khubalkar, S.; Chopade, A.; Junghare, A.; Aware, M.; Das, S. Design and realization of stand-alone digital fractional order PID controller for Buck converter fed DC motor. Circuits Syst. Signal Process. 2016, 35, 2189–2211. [Google Scholar] [CrossRef]
- Khubalkar, S.W.; Junghare, A.S.; Aware, M.V.; Chopade, A.S.; Das, S. Demonstrative fractional order – PID controller based DC motor drive on digital platform. ISA Trans. 2018, 82, 79–93. [Google Scholar] [CrossRef]
- Patil, M.D.; Vadirajacharya, K.; Khubalkar, S.W. Design and tuning of digital fractional-order PID controller for permanent magnet DC motor. IETE J. Res. 2021, 1–11. [Google Scholar] [CrossRef]
- Hanif, M.I.F.M.; Suid, M.H.; Ahmad, M.A. A piecewise affine PI controller for Buck converter generated DC motor. Int. J. Power Electron. Drive Syst. 2019, 10, 1419–1426. [Google Scholar] [CrossRef]
- Nizami, T.K.; Chakravarty, A.; Mahanta, C. Design and implementation of a neuro-adaptive backstepping controller for Buck converter fed PMDC-motor. Control Eng. Pract. 2017, 58, 78–87. [Google Scholar] [CrossRef]
- Nizami, T.K.; Chakravarty, A.; Mahanta, C.; Iqbal, A.; Hosseinpour, A. Enhanced dynamic performance in DC–DC converter-PMDC motor combination through an intelligent non-linear adaptive control scheme. IET Power Electron. 2022, 15, 1607–1616. [Google Scholar] [CrossRef]
- Nizami, T.K.; Gangula, S.D.; Reddy, R.; Dhiman, H.S. Legendre neural network based intelligent control of DC-DC step down converter-PMDC motor combination. IFAC 2022, 55, 162–167. [Google Scholar] [CrossRef]
- Rigatos, G.; Siano, P.; Sayed-Mouchaweh, M. Adaptive neurofuzzy H-infinity control of DC-DC voltage converters. Neural Comput. Appl. 2020, 33, 2507–2520. [Google Scholar] [CrossRef]
- Kazemi, M.G.; Montazeri, M. Fault detection of continuous time linear switched systems using combination of bond graph method and switching observer. ISA Trans. 2019, 94, 338–351. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S.G.; Thilagar, S.H. Sensorless load torque estimation and passivity based control of Buck converter fed DC motor. Sci. World J. 2015, 2015, 132843. [Google Scholar] [CrossRef]
- Srinivasan, G.K.; Srinivasan, H.T.; Rivera, M. Sensitivity analysis of exact tracking error dynamics passive output control for a flat/partially flat converter Systems. Electronics 2020, 9, 1942. [Google Scholar] [CrossRef]
- Shneen, S.W.; Shuraiji, A.L.; Hameed, K.R. Simulation model of proportional integral controller-PWM DC-DC power converter for DC motor using matlab. Indones. J. Electr. Eng. Comput. Sci. 2023, 29, 725–734. [Google Scholar] [CrossRef]
- Chouya, A. Adaptive sliding mode control with chattering elimination for Buck converter driven DC motor. WSEAS Trans. Syst. Control 2023, 22, 19–28. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Reger, J.; Sira-Ramírez, H. Load torque estimation and passivity-based control of a Boost-converter/DC-motor combination. IEEE Trans. Control Syst. Technol. 2010, 18, 1398–1405. [Google Scholar] [CrossRef]
- Alexandridis, A.T.; Konstantopoulos, G.C. Modified PI speed controllers for series-excited DC motors fed by DC/DC Boost converters. Control Eng. Pract. 2014, 23, 14–21. [Google Scholar] [CrossRef]
- Konstantopoulos, G.C.; Alexandridis, A.T. Enhanced control design of simple DC-DC Boost converter-driven DC motors: Analysis and implementation. Electr. Power Compon. Syst. 2015, 43, 1946–1957. [Google Scholar] [CrossRef]
- Malek, S. A new nonlinear controller for DC-DC Boost converter fed DC motor. Int. J. Power Electron. 2015, 7, 54–71. [Google Scholar] [CrossRef]
- Mishra, P.; Banerjee, A.; Ghosh, M.; Baladhandautham, C.B. Digital pulse width modulation sampling effect embodied steady-state time-domain modeling of a Boost converter driven permanent magnet DC brushed motor. Int. Trans. Elect. Energy Syst. 2021, 31, e12970. [Google Scholar] [CrossRef]
- Govindharaj, A.; Mariappan, A. Design and analysis of novel Chebyshev neural adaptive backstepping controller for Boost converter fed PMDC motor. Int. J. Autom. Control 2020, 14, 694–712. [Google Scholar] [CrossRef]
- Alajmi, B.; Ahmed, N.A.; Al-Othman, A.K. Small-signal analysis and hardware implementation of Boost converter fed PMDC motor for electric vehicle applications. J. Eng. Res. 2021, 9, 189–208. [Google Scholar] [CrossRef]
- Manikandan, C.T.; Sundarrajan, G.T.; Krishnan, V.G.; Ofori, I. Performance analysis of two-loop interleaved Boost converter fed PMDC-motor system using FLC. Math. Probl. Eng. 2022, 2022, 1639262. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Roldán-Caballero, A.; Hernández-Márquez, E.; García-Chávez, R.E.; Marciano-Melchor, M.; García-Sánchez, J.R.; Silva-Ortigoza, G. Hierarchical flatness-based control for velocity trajectory tracking of the DC/DC Boost converter–DC motor system powered by renewable energy. IEEE Access 2023, 11, 32464–32475. [Google Scholar] [CrossRef]
- Sönmez, Y.; Dursun, M.; Güvenç, U.; Yilmaz, C. Start up current control of Buck–Boost convertor-fed serial DC motor. Pamukkale Univ. J. Eng. Sci. 2009, 15, 278–283. [Google Scholar]
- Linares-Flores, J.; Barahona-Avalos, J.L.; Sira-Ramírez, H.; Contreras-Ordaz, M.A. Robust passivity-based control of a Buck–Boost-converter/DC-motor system: An active disturbance rejection approach. IEEE Trans. Ind. Appl. 2012, 48, 2362–2371. [Google Scholar] [CrossRef]
- Gurumoorthy, K.; Balaraman, S. Controlling the speed of renewable-sourced DC drives with a series compensated DC to DC converter and sliding mode controller. Automatika 2023, 64, 114–126. [Google Scholar] [CrossRef]
- Srinivasan, G.K.; Srinivasan, H.T.; Rivera, M. Low-cost implementation of passivity-based control and estimation of load torque for a Luo converter with dynamic load. Electronics 2020, 9, 1914. [Google Scholar] [CrossRef]
- Arshad, M.H.; Abido, M.A. Hierarchical control of DC motor coupled with Cuk converter combining differential flatness and sliding mode control. Arab. J. Sci. Eng. 2021, 46, 9413–9422. [Google Scholar] [CrossRef]
- Ismail, A.A.A.; Elnady, A. Advanced drive system for DC motor using multilevel DC/DC Buck converter circuit. IEEE Access 2019, 7, 54167–54178. [Google Scholar] [CrossRef]
- Guerrero, E.; Guzmán, E.; Linares, J.; Martínez, A.; Guerrero, G. FPGA-based active disturbance rejection velocity control for a parallel DC/DC Buck converter–DC motor system. IET Power Electron. 2020, 13, 356–367. [Google Scholar] [CrossRef]
- Hernández-Márquez, E.; Avila-Rea, C.A.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Marciano-Melchor, M.; Marcelino-Aranda, M.; Roldán-Caballero, A.; Márquez-Sánchez, C. New “full-bridge Buck inverter–DC motor” system: Steady-state and dynamic analysis and experimental validation. Electronics 2019, 8, 1216. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Hernandez-Marquez, E.; Roldan-Caballero, A.; Tavera-Mosqueda, S.; Marciano-Melchor, M.; Garcia-Sanchez, J.R.; Hernandez-Guzman, V.M.; Silva-Ortigoza, G. Sensorless tracking control for a “full-bridge Buck inverter–DC motor” system: Passivity and flatness-based design. IEEE Access 2021, 9, 132191–132204. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Marciano-Melchor, M.; García-Chávez, R.E.; Roldán-Caballero, A.; Hernández-Guzmán, V.M.; Hernández-Márquez, E.; García-Sánchez, J.R.; García-Cortés, R.; Silva-Ortigoza, G. Robust flatness-based tracking control for a “full-bridge Buck inverter–DC Motor” system. Mathematics 2022, 10, 4110. [Google Scholar] [CrossRef]
- Hernández-Márquez, E.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Antonio-Cruz, M.; Hernández-Guzmán, V.M.; Taud, H.; Marcelino-Aranda, M. Bidirectional tracking robust controls for a DC/DC Buck converter–DC motor system. Complexity 2018, 2018, 1260743. [Google Scholar] [CrossRef]
- Chi, X.; Quan, S.; Chen, J.; Wang, Y.-X.; He, H. Proton exchange membrane fuel cell-powered bidirectional DC motor control based on adaptive sliding-mode technique with neural network estimation. Int. J. Hydrog. Energy 2020, 45, 20282–20292. [Google Scholar] [CrossRef]
- Zhao, Z.; Yang, J.; Li, S.; Yu, X.; Wang, Z. Continuous output feedback TSM control for uncertain systems with a DC–AC inverter example. IEEE Trans. Circuit Syst. II Express Briefs 2018, 65, 71–75. [Google Scholar] [CrossRef]
- Chang, E.-C.; Cheng, C.-A.; Wu, R.-C. Robust optimal tracking control of a full-bridge DC-AC converter. Appl. Sci. 2021, 11, 1211. [Google Scholar] [CrossRef]
- Velasco-Muñoz, H.; Candelo-Becerra, J.E.; Hoyos, F.E.; Rincón, A. Speed regulation of a permanent magnet DC motor with sliding mode control based on washout filter. Symmetry 2022, 14, 728. [Google Scholar] [CrossRef]
- García-Rodríguez, V.H.; Pérez-Cruz, J.H.; Ambrosio-Lázaro, R.C.; Tavera-Mosqueda, S. Analysis of DC/DC Boost converter–full-bridge Buck inverter system for AC generation. Energies 2023, 16, 2509. [Google Scholar] [CrossRef]
- García-Sánchez, J.R.; Hernández-Márquez, E.; Ramírez-Morales, J.; Marciano-Melchor, M.; Marcelino-Aranda, M.; Taud, H.; Silva-Ortigoza, R. A robust differential flatness-based tracking control for the “MIMO DC/DC Boost converter–Inverter–DC motor” system: Experimental results. IEEE Access 2019, 7, 84497–84505. [Google Scholar] [CrossRef]
- Egidio, L.N.; Deacto, G.S.; Jungers, R.M. Stabilization of rank-deficient continuous-time switched affine systems. Automatica 2022, 143, 110426. [Google Scholar] [CrossRef]
- Hernández-Márquez, E.; Avila-Rea, C.A.; García-Sánchez, J.R.; Silva-Ortigoza, R.; Silva-Ortigoza, G.; Taud, H.; Marcelino-Aranda, M. Robust tracking controller for a DC/DC Buck–Boost converter–inverter–DC motor system. Energies 2018, 11, 2500. [Google Scholar] [CrossRef]
- Ghazali, M.R.; Ahmad, M.A.; Raja Ismail, R.M.T. Adaptive safe experimentation dynamics for data-driven Neuroendocrine-PID control of MIMO systems. IETE J. Res. 2022, 68, 1611–1624. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Sira-Ramírez, H.; Cuevas-López, E.F.; Contreras-Ordaz, M.A. Sensorless passivity based control of a DC motor via a solar powered Sepic converter-full bridge combination. J. Power Electron. 2011, 11, 743–750. [Google Scholar] [CrossRef]
- Erenturk, K. Hybrid control of a mechatronic system: Fuzzy logic and grey system modeling approach. IEEE/ASME Trans. Mechatron. 2007, 12, 703–710. [Google Scholar] [CrossRef]
- García-Sánchez, J.R.; Tavera-Mosqueda, S.; Silva-Ortigoza, R.; Hernández-Guzmán, V.M.; Sandoval-Gutiérrez, J.; Marcelino-Aranda, M.; Taud, H.; Marciano-Melchor, M. Robust switched tracking control for wheeled mobile robots considering the actuators and drivers. Sensors 2018, 18, 4316. [Google Scholar] [CrossRef]
- Esram, T.; Chapman, P.L. Comparison of photovoltaic array maximum power point tracking techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Ali, M.N.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. An efficient fuzzy-logic based variable-step incremental conductance MPPT method for grid-connected PV systems. IEEE Access 2021, 9, 26420–26430. [Google Scholar] [CrossRef]
- Devarakonda, A.K.; Karuppiah, N.; Selvaraj, T.; Balachandran, P.K.; Shanmugasundaram, R.; Senjyu, T. A Comparative analysis of maximum power point techniques for solar photovoltaic systems. Energies 2022, 15, 8776. [Google Scholar] [CrossRef]
- Ganesan, S.; David, P.W.; Balachandran, P.K.; Samithas, D. Intelligent starting current-based fault identification of an induction motor operating under various power quality issues. Energies 2021, 14, 304. [Google Scholar] [CrossRef]
- Elnaghi, B.E.; Abelwhab, M.N.; Ismaiel, A.M.; Mohammed, R.H. Solar hydrogen variable speed control of induction motor based on chaotic billiards optimization technique. Energies 2023, 16, 1110. [Google Scholar] [CrossRef]
- Poompavai, T.; Kowsalya, M. Control and energy management strategies applied for solar photovoltaic and wind energy fed water pumping system: A review. Renew. Sustain. Energy Rev. 2019, 107, 108–122. [Google Scholar] [CrossRef]
- Jouili, K.; Madani, A. Nonlinear Lyapunov control of a photovoltaic water pumping system. Energies 2023, 16, 2241. [Google Scholar] [CrossRef]
- Hazil, O.; Allouani, F.; Bououden, S.; Chadli, M.; Chemachema, M.; Boulkaibet, I.; Neji, B. A robust model predictive control for a photovoltaic pumping system subject to actuator saturation Nonlinearity. Sustainability 2023, 15, 4493. [Google Scholar] [CrossRef]
- Niestrój, R.; Rogala, T.; Skarka, W. An energy consumption model for designing an AGV energy storage system with a PEMFC STACK. Energies 2020, 13, 3435. [Google Scholar] [CrossRef]
- Radhakrishnan, R.K.G.; Marimuthu, U.; Balachandran, P.K.; Shukry, A.M.M.; Senjyu, T. An intensified marine predator algorithm (MPA) for designing a solar-powered BLDC motor used in EV systems. Sustainability 2022, 14, 14120. [Google Scholar] [CrossRef]
- Demir, M.H.; Demirok, M. Designs of particle-swarm-optimization-based intelligent PID controllers and DC/DC Buck converters for PEM fuel-cell-powered four-wheeled automated guided vehicle. Appl. Sci. 2023, 13, 2919. [Google Scholar] [CrossRef]
- Sira-Ramírez, H. Sliding Mode Control: The Delta-Sigma Modulation Approach; Birkhäuser: Basel, Switzerland, 2015. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Magnitude |
|---|---|
| Maximum power () | 410.108 W |
| Voltage at maximum power () | 50.32 V |
| Current at maximum power () | 8.15 A |
| Open circuit voltage () | 61.06 V |
| Short circuit current () | 8.77 A |
| Characteristics | Magnitude |
|---|---|
| Maximum power () | 310.66 W |
| Voltage at maximum power () | 31.7 V |
| Current at maximum power () | 9.8 A |
| Open circuit voltage () | 39.7 V |
| Short circuit current () | 10.12 A |
| Characteristics | Magnitude |
|---|---|
| Maximum power () | W |
| Voltage at maximum power () | V |
| Current at maximum power () | A |
| Open circuit voltage () | V |
| Short circuit current () | A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orta-Quintana, Á.A.; García-Chávez, R.E.; Silva-Ortigoza, R.; Marciano-Melchor, M.; Villarreal-Cervantes, M.G.; García-Sánchez, J.R.; García-Cortés, R.; Silva-Ortigoza, G. Sensorless Tracking Control Based on Sliding Mode for the “Full-Bridge Buck Inverter–DC Motor” System Fed by PV Panel. Sustainability 2023, 15, 9858. https://doi.org/10.3390/su15139858
Orta-Quintana ÁA, García-Chávez RE, Silva-Ortigoza R, Marciano-Melchor M, Villarreal-Cervantes MG, García-Sánchez JR, García-Cortés R, Silva-Ortigoza G. Sensorless Tracking Control Based on Sliding Mode for the “Full-Bridge Buck Inverter–DC Motor” System Fed by PV Panel. Sustainability. 2023; 15(13):9858. https://doi.org/10.3390/su15139858
Chicago/Turabian StyleOrta-Quintana, Ángel Adrián, Rogelio Ernesto García-Chávez, Ramón Silva-Ortigoza, Magdalena Marciano-Melchor, Miguel Gabriel Villarreal-Cervantes, José Rafael García-Sánchez, Rocío García-Cortés, and Gilberto Silva-Ortigoza. 2023. "Sensorless Tracking Control Based on Sliding Mode for the “Full-Bridge Buck Inverter–DC Motor” System Fed by PV Panel" Sustainability 15, no. 13: 9858. https://doi.org/10.3390/su15139858
APA StyleOrta-Quintana, Á. A., García-Chávez, R. E., Silva-Ortigoza, R., Marciano-Melchor, M., Villarreal-Cervantes, M. G., García-Sánchez, J. R., García-Cortés, R., & Silva-Ortigoza, G. (2023). Sensorless Tracking Control Based on Sliding Mode for the “Full-Bridge Buck Inverter–DC Motor” System Fed by PV Panel. Sustainability, 15(13), 9858. https://doi.org/10.3390/su15139858