
A Comparative Study of Optimal Individual Pitch Control Methods



Abstract
:1. Introduction
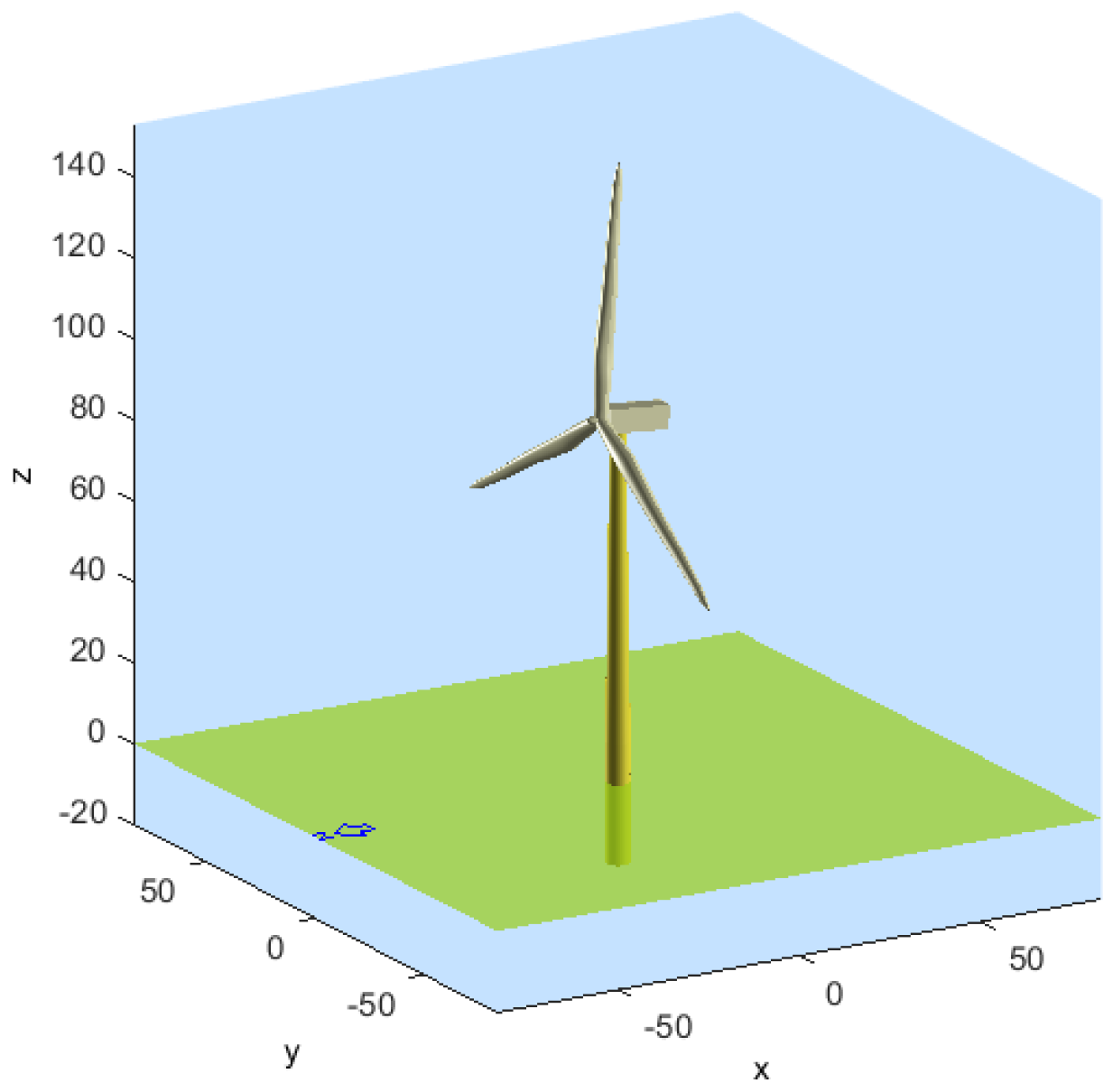
2. Full Nonlinear Wind Turbine Model
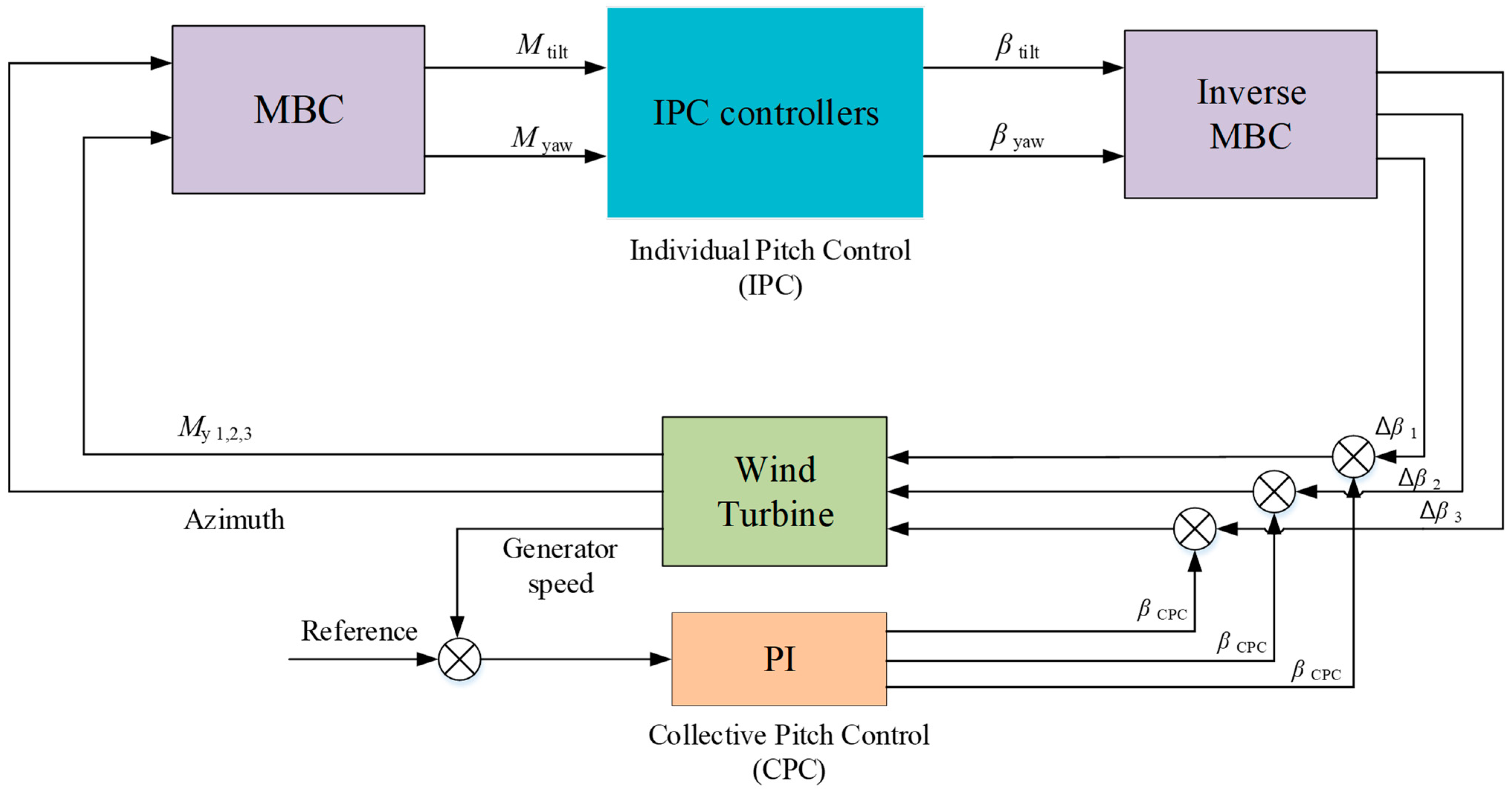
3. Individual Pitch Control
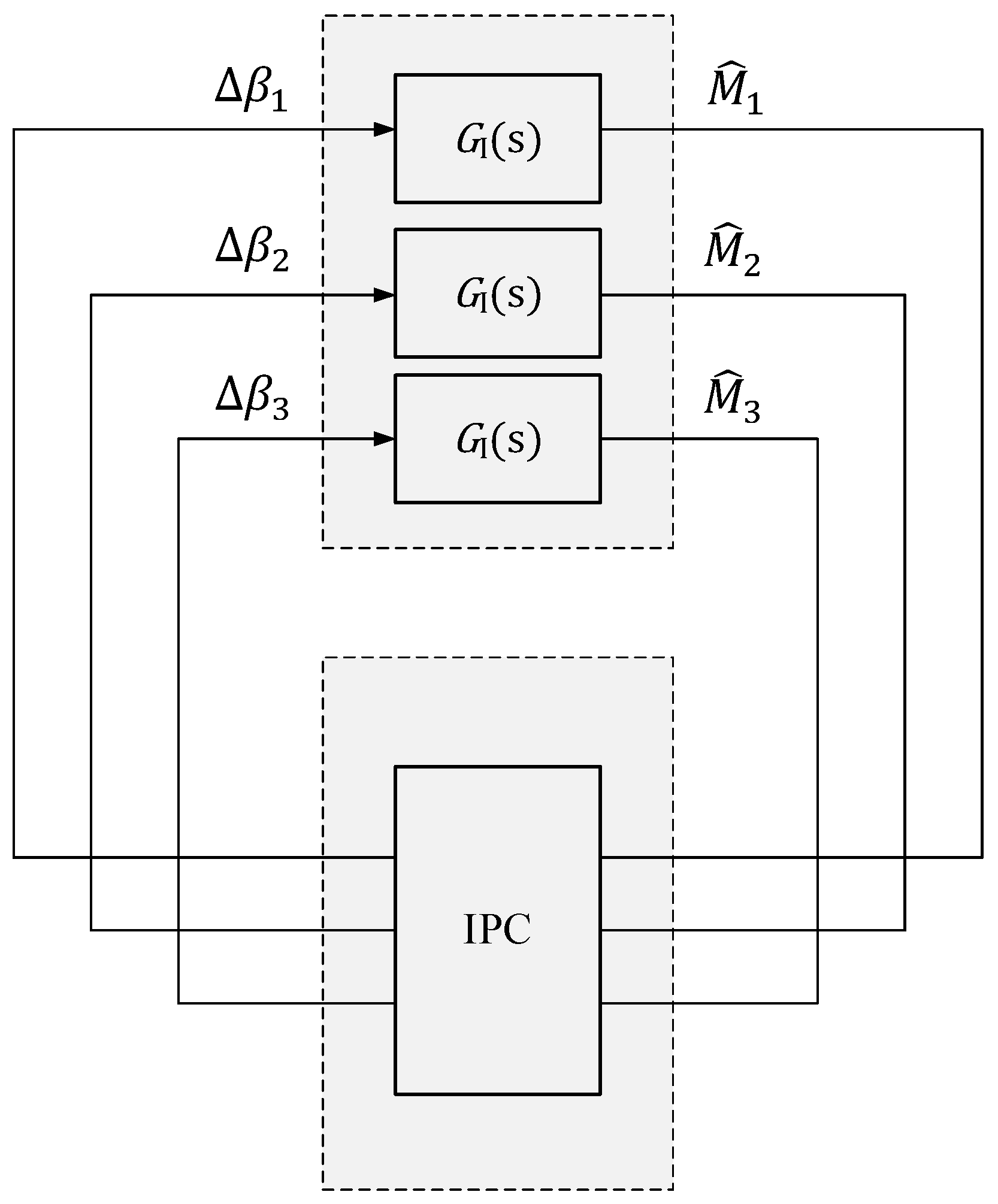
3.1. IPC Control Design Model
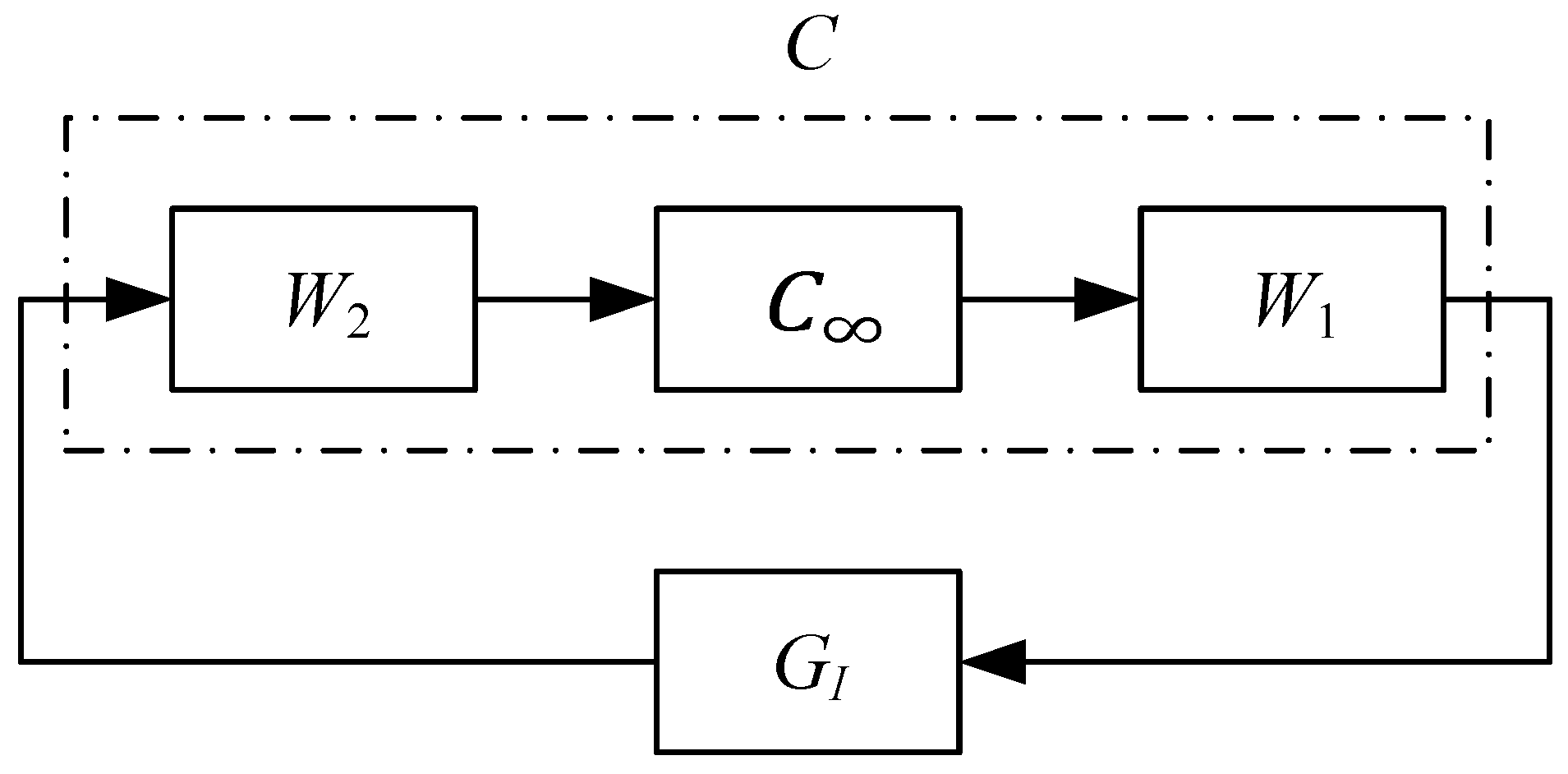
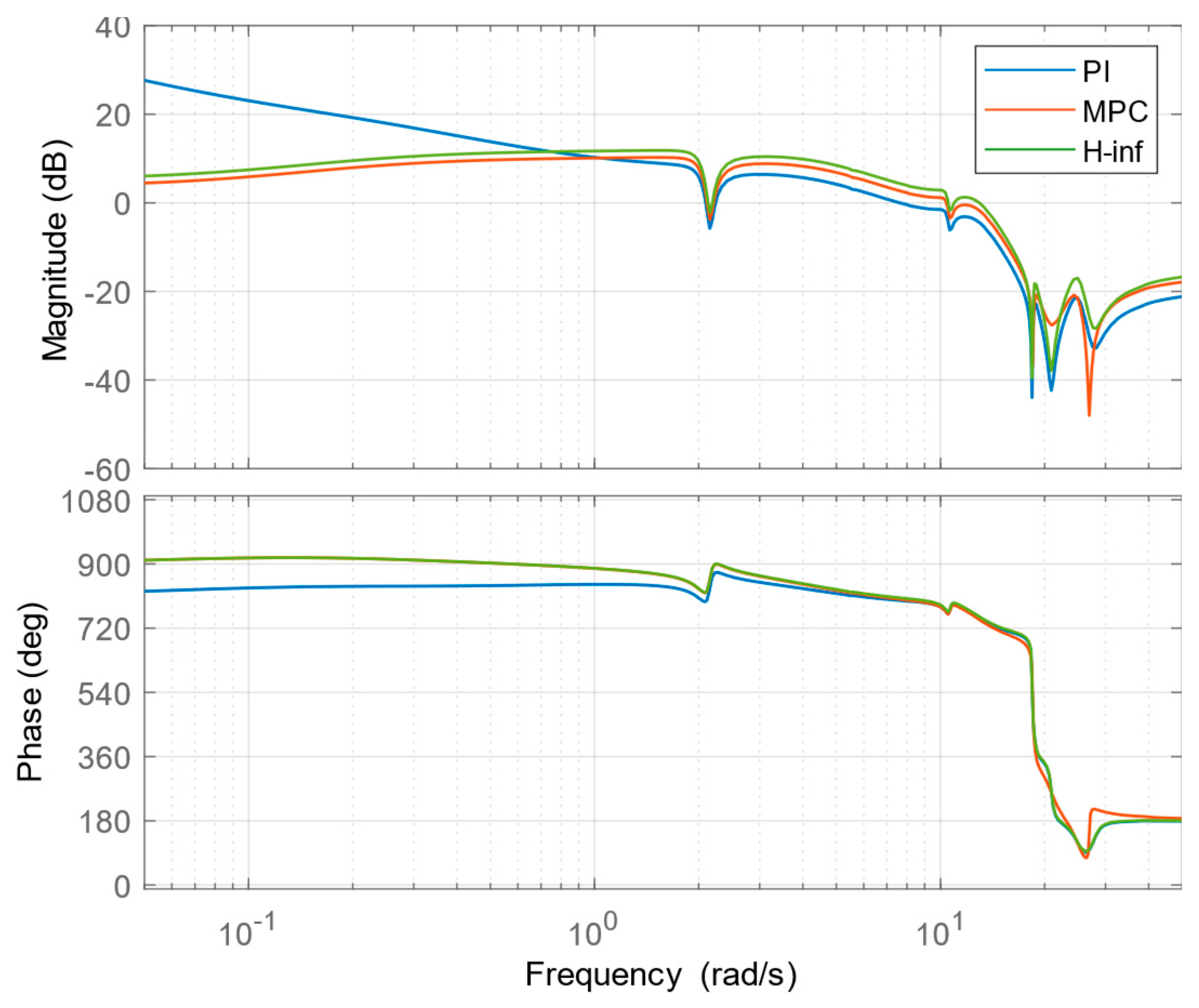
3.2. H∞ Control Design
Stability Analysis Controller
3.3. MPC Controller Design
4. Simulation Studies
4.1. At 16 m/s with Turbulent Intensity B
4.2. At 16 m/s with Turbulent Intensity A
4.3. At 14 m/s with Turbulent Intensity B
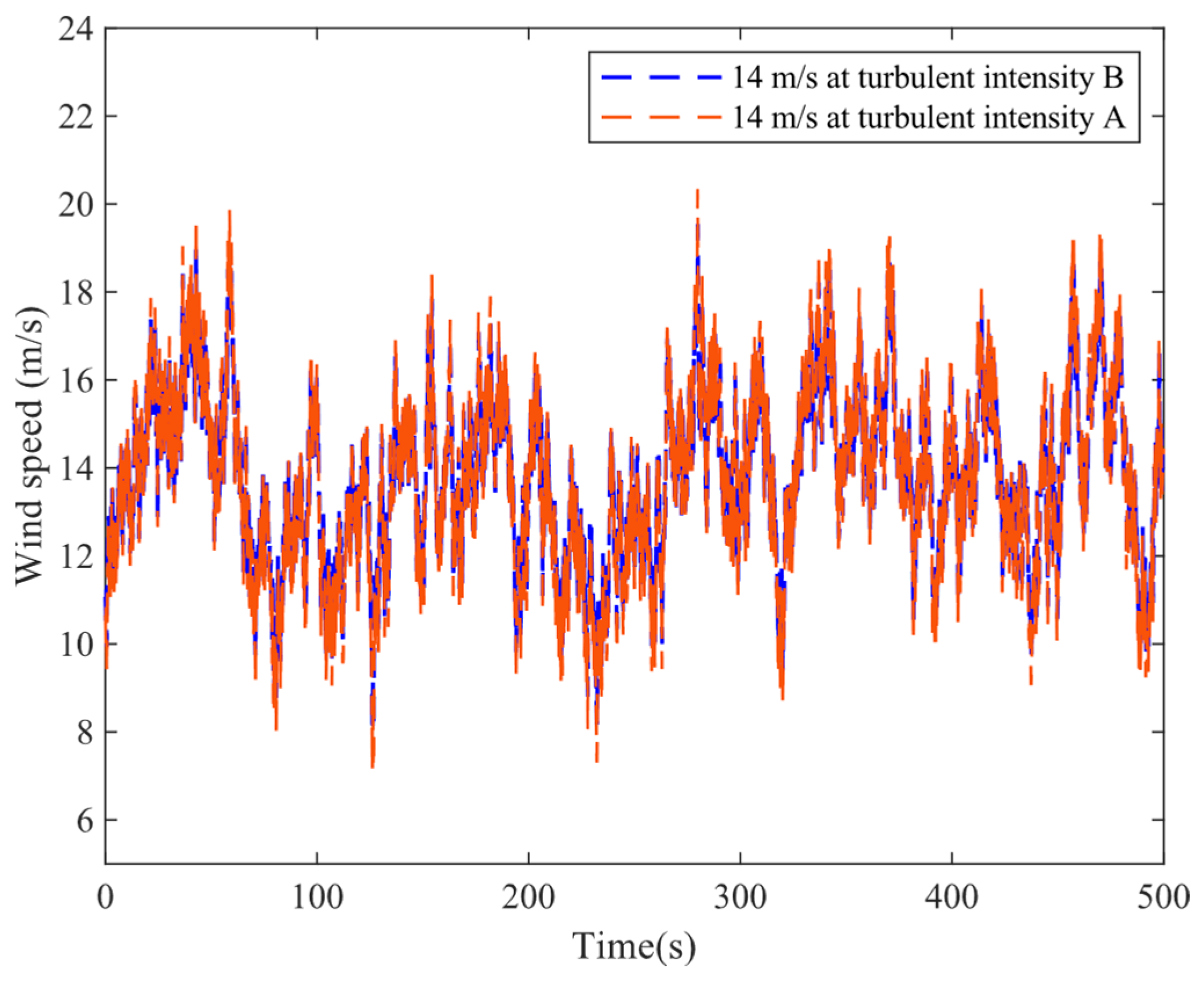
4.4. At 14 m/s with Turbulent Intensity A
4.5. Analysis of Controller Performances
4.6. Analysis of Performances Metrices
DEL Analysis
4.7. Discussions
5. Conclusions and Future Work
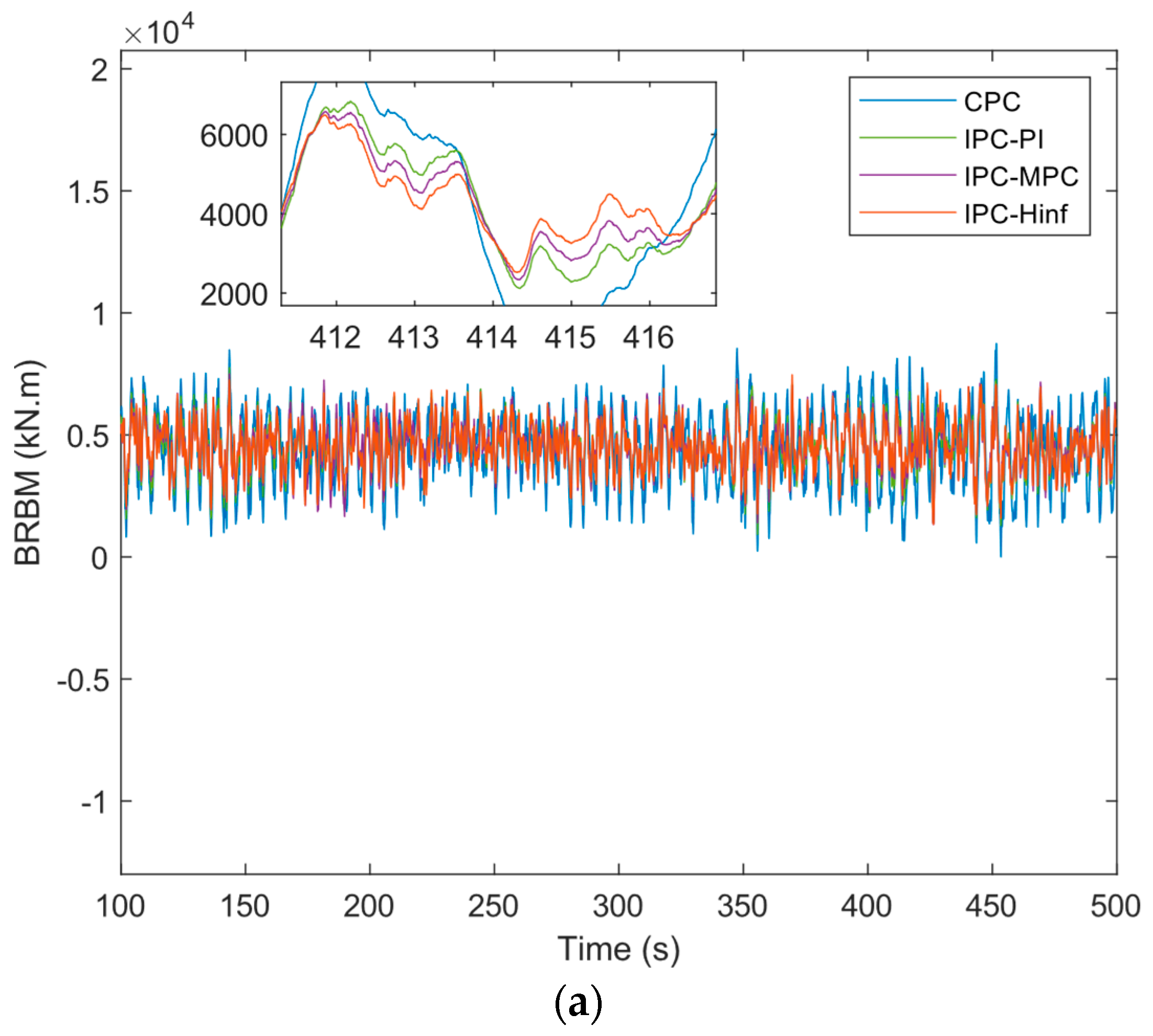
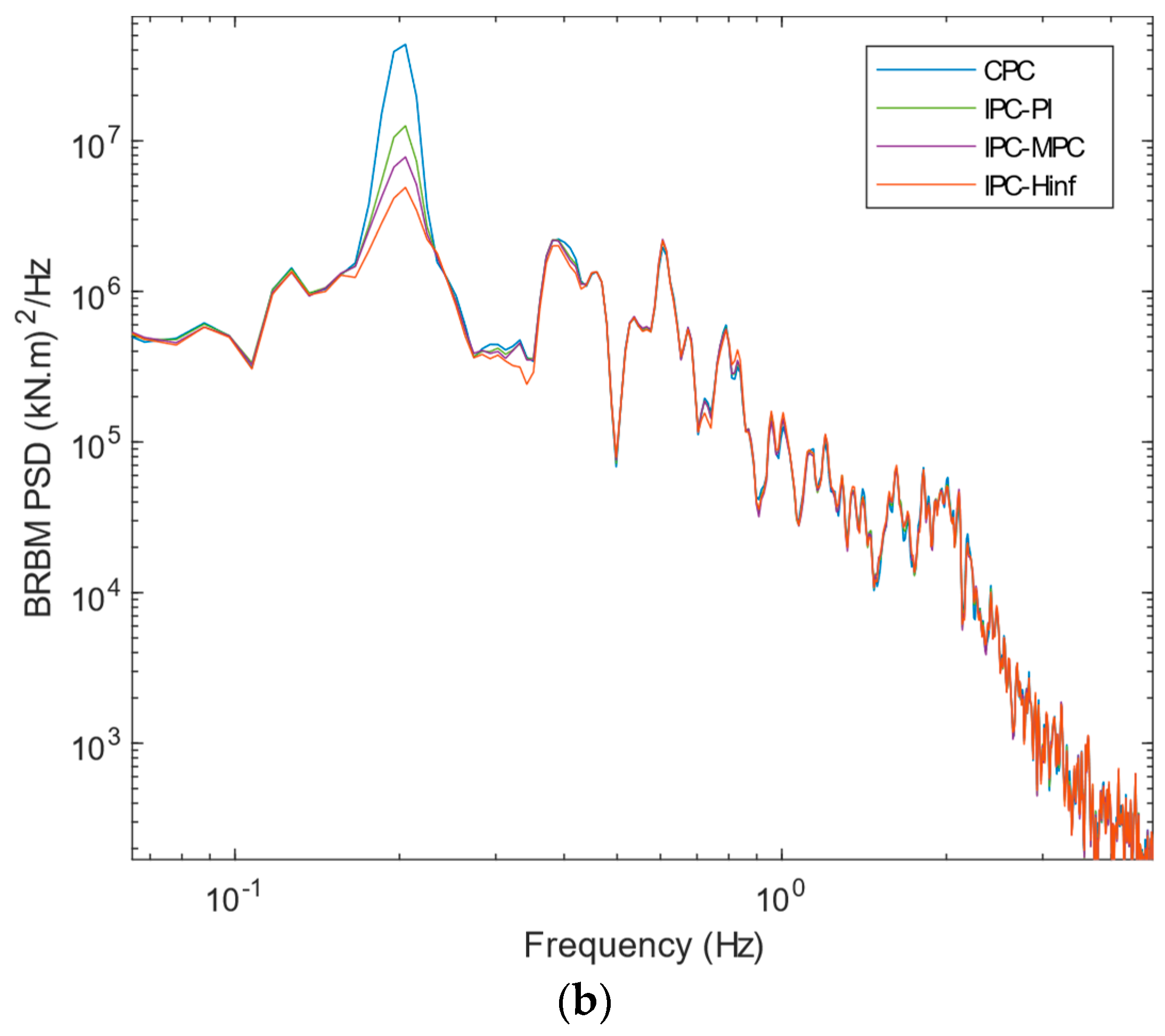
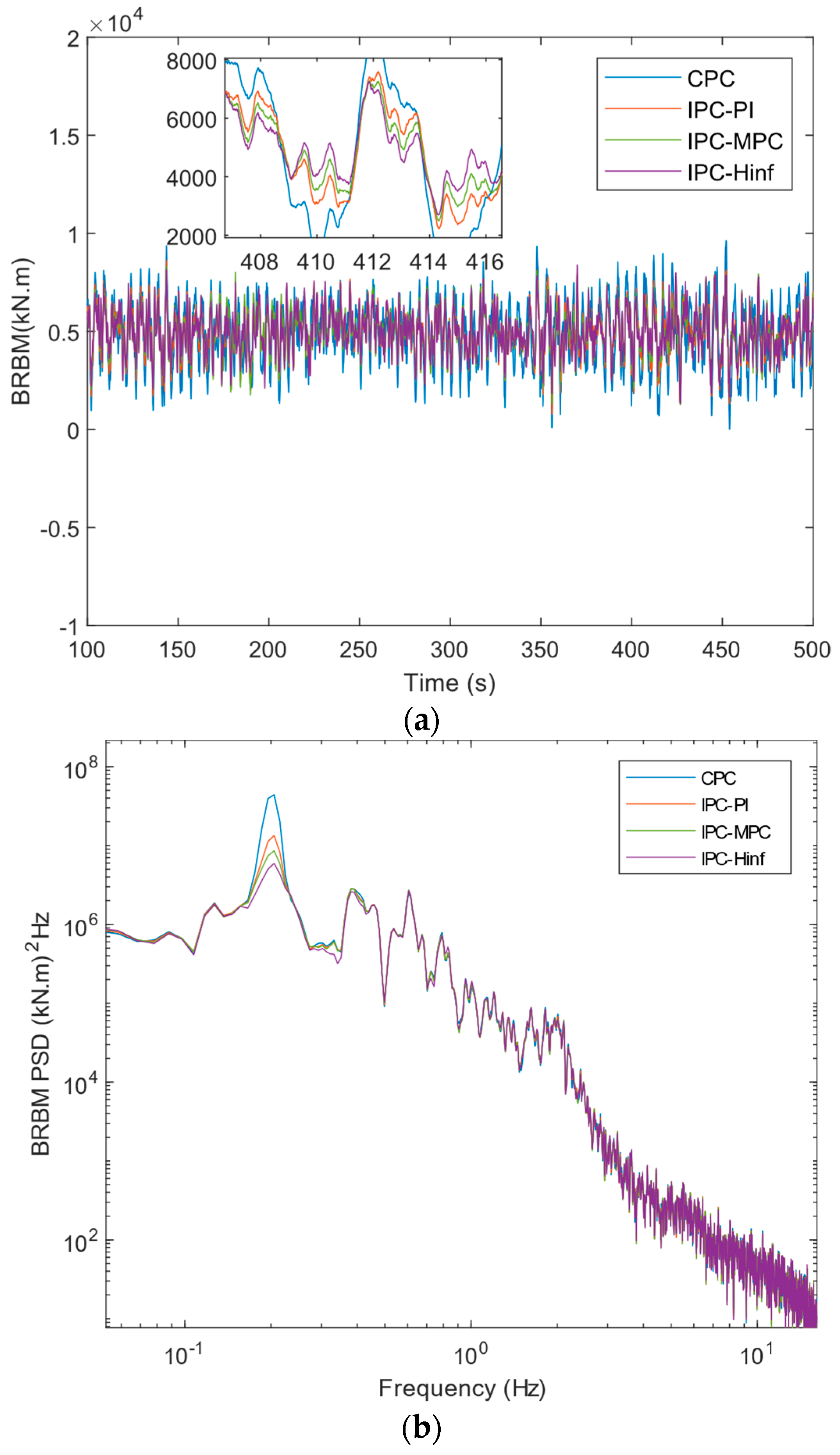
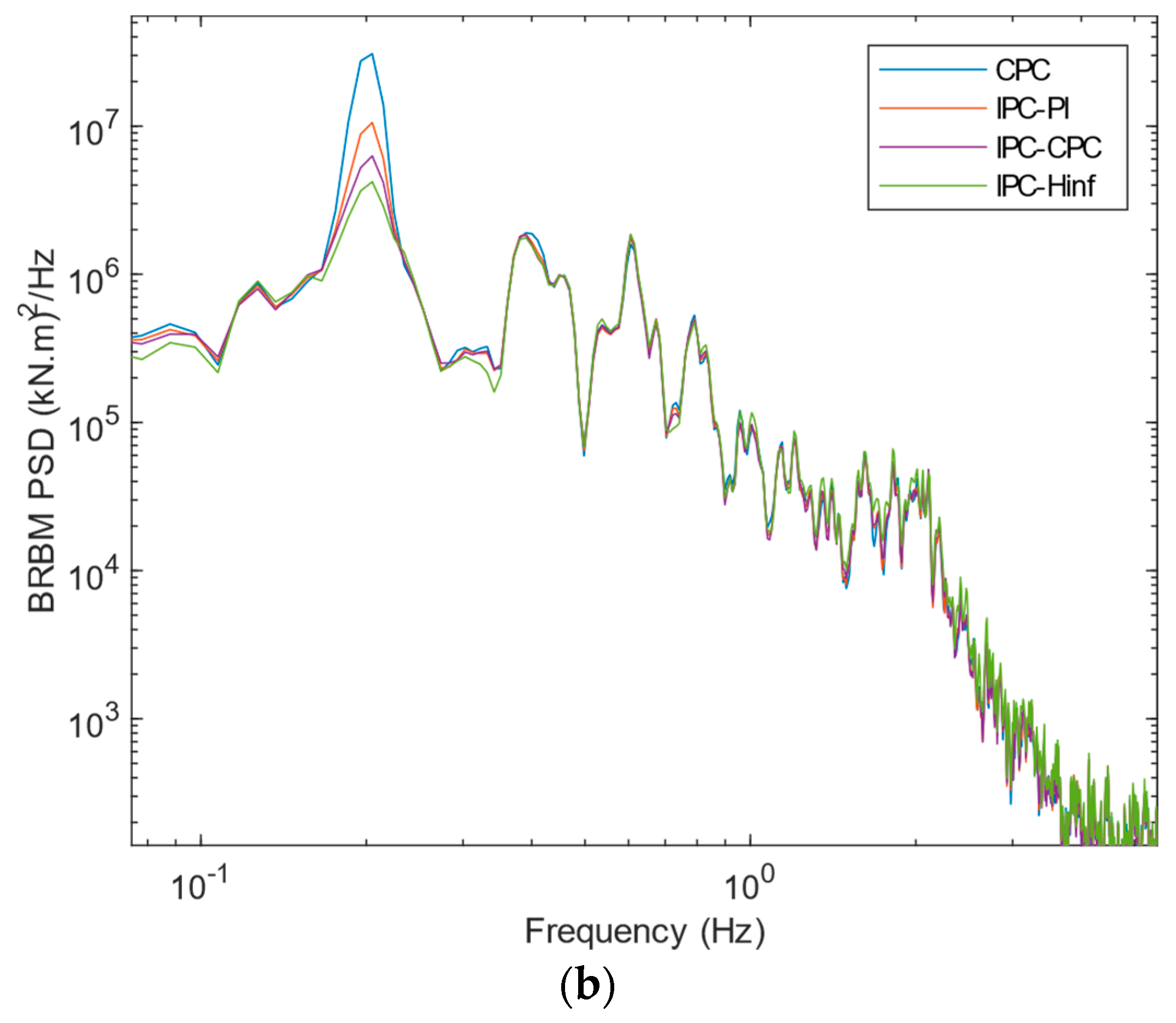
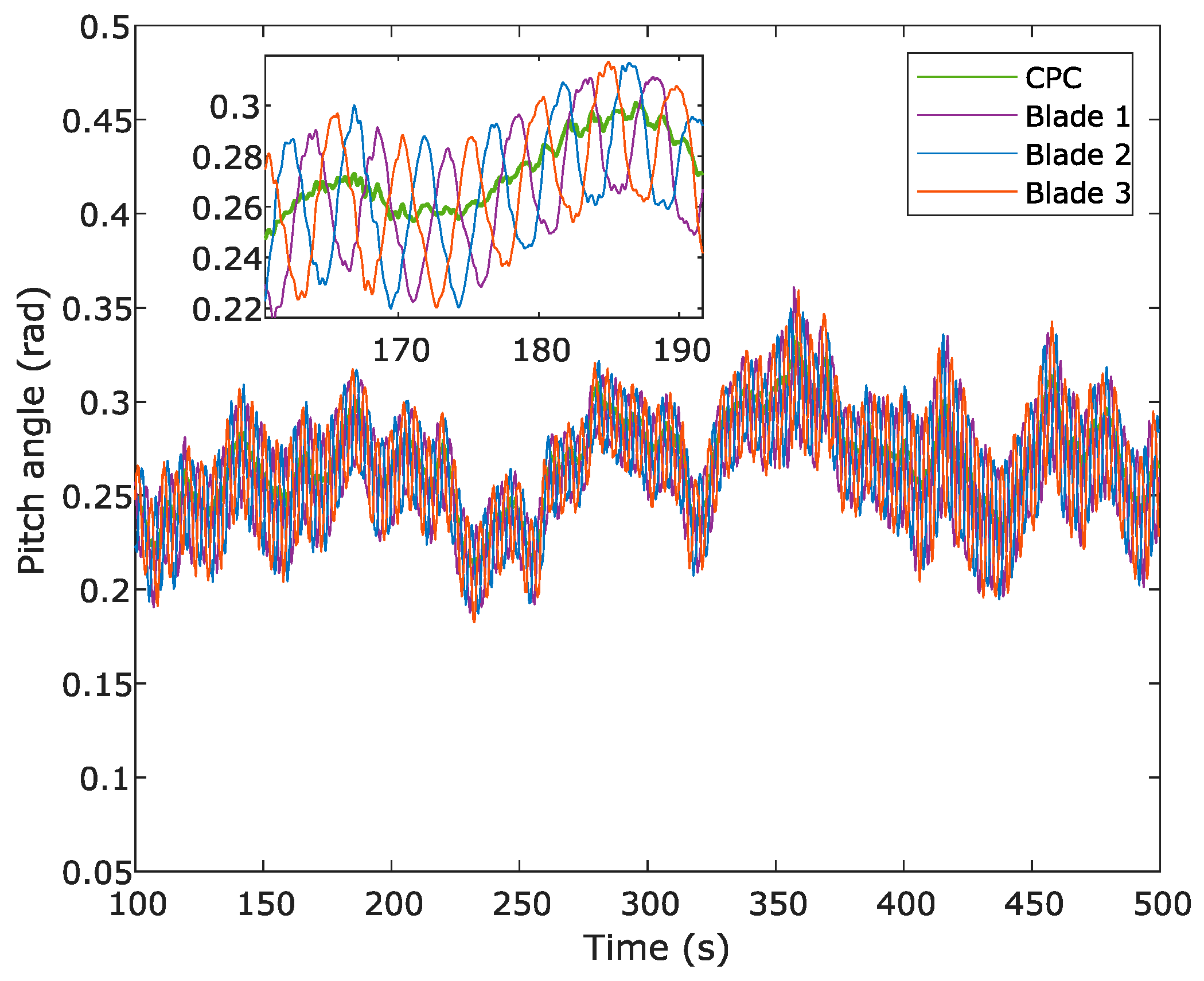
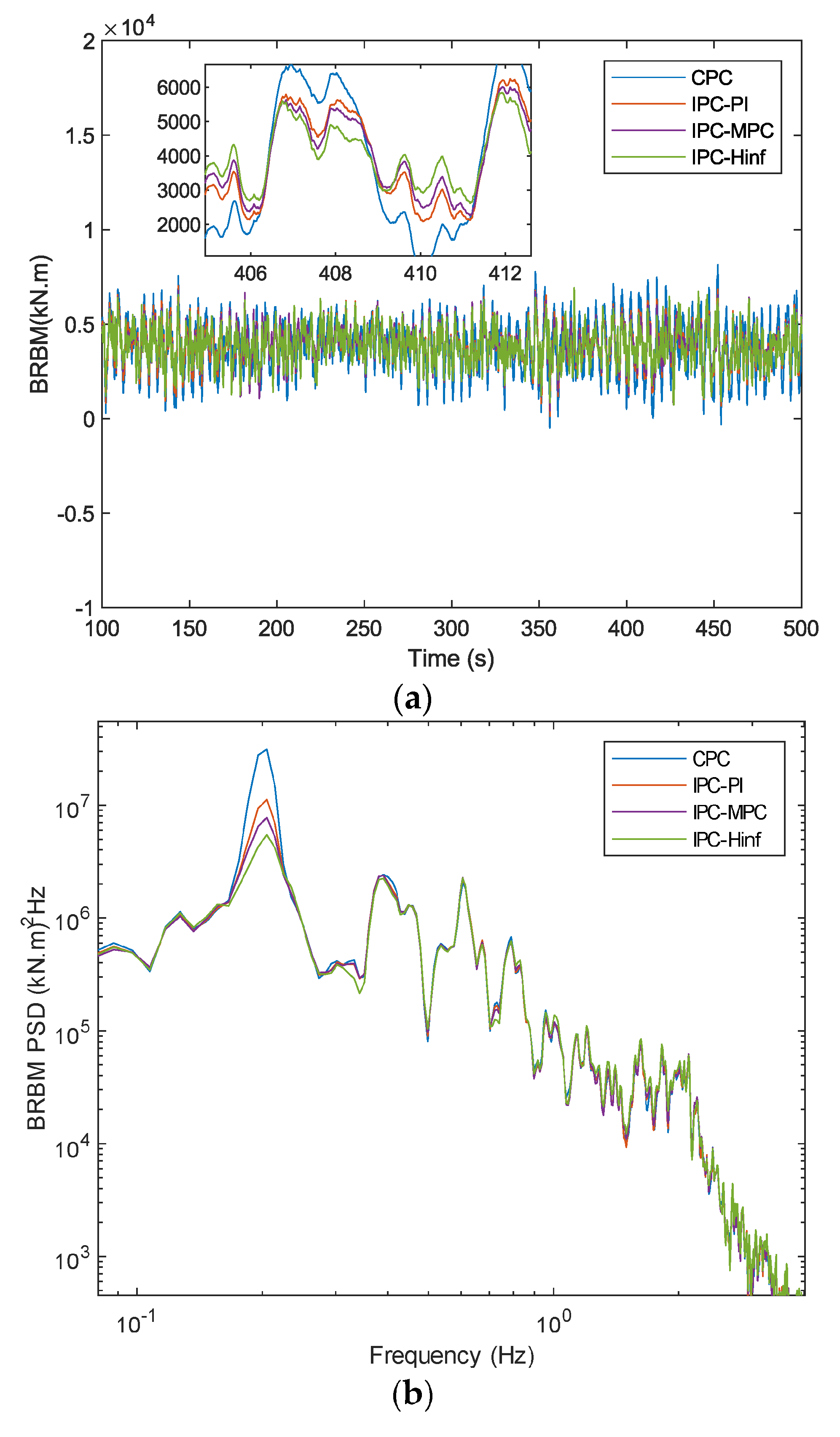
- In this study, first, a CPC is designed and tested against a full nonlinear FAST 5 MW NREL wind turbine in Matlab/ SIMULINK. Subsequently, IPCs have been applied to alleviate the periodic loads at different turbulent wind speeds. This work demonstrates a comparative performance analysis of existing IPC controllers rather than the introduction of new algorithms through comprehensive simulation studies. The aim of this study is to project the load alleviation (BRBMs) performance and DEL studies (lifetime analysis) by using time and frequency domain methods at varying wind speeds with different turbulence intensities and also with EOG conditions. From PSD plots, it can also be noticed that the peak at 1P frequency is reduced significantly without compromising the power generation of the wind turbine. Moreover, IPC- outperforms the other reported controllers in this study.
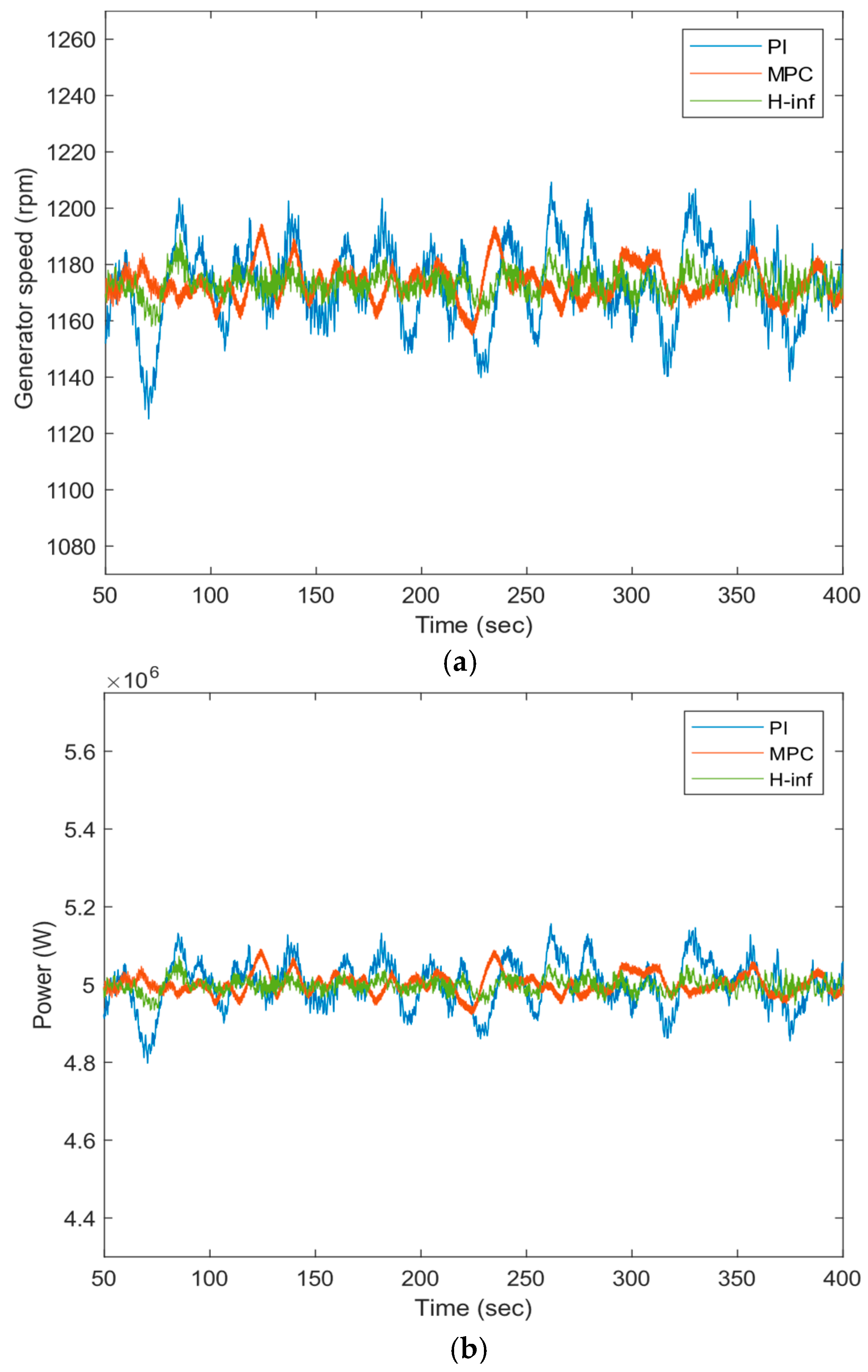
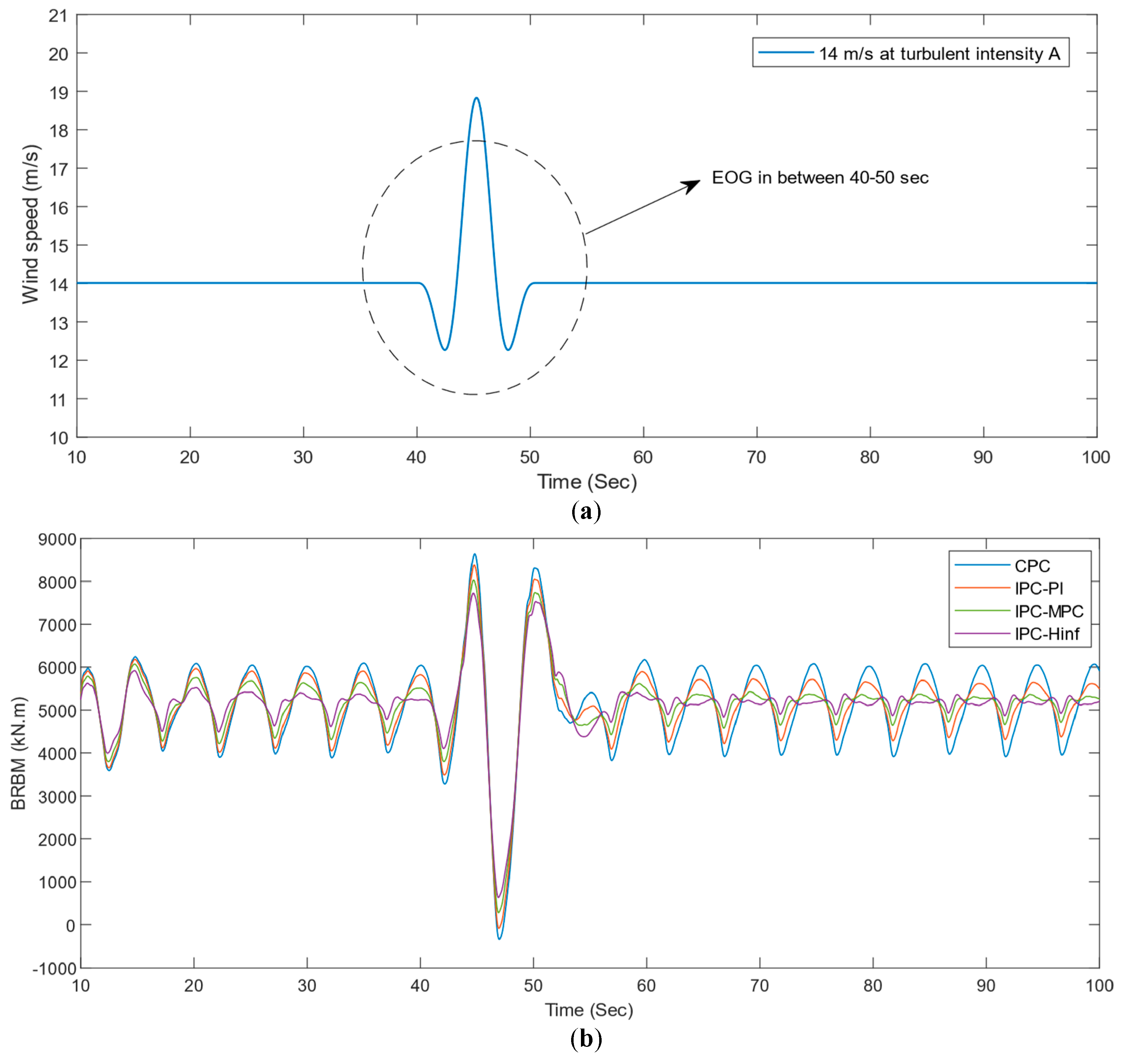
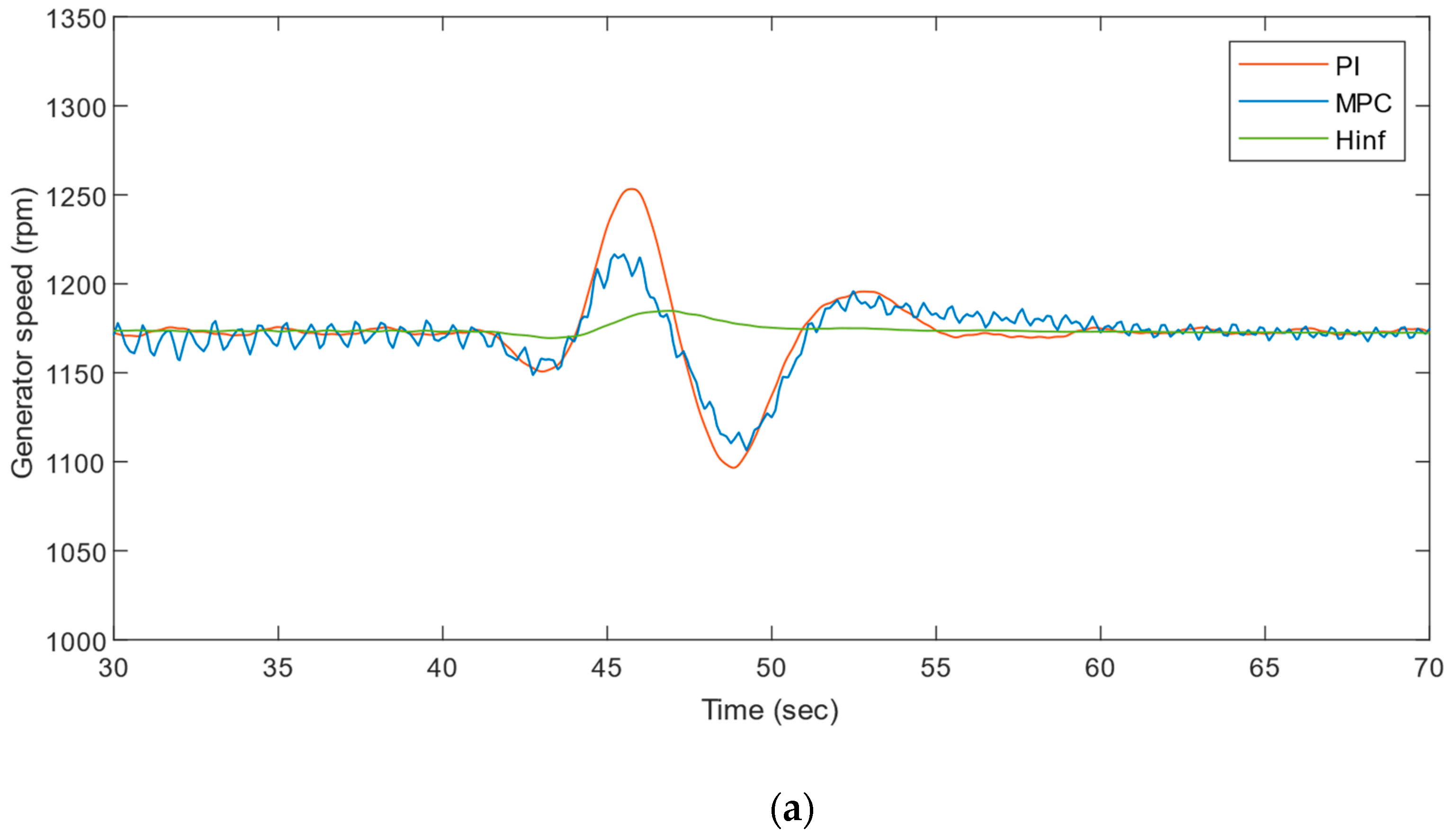
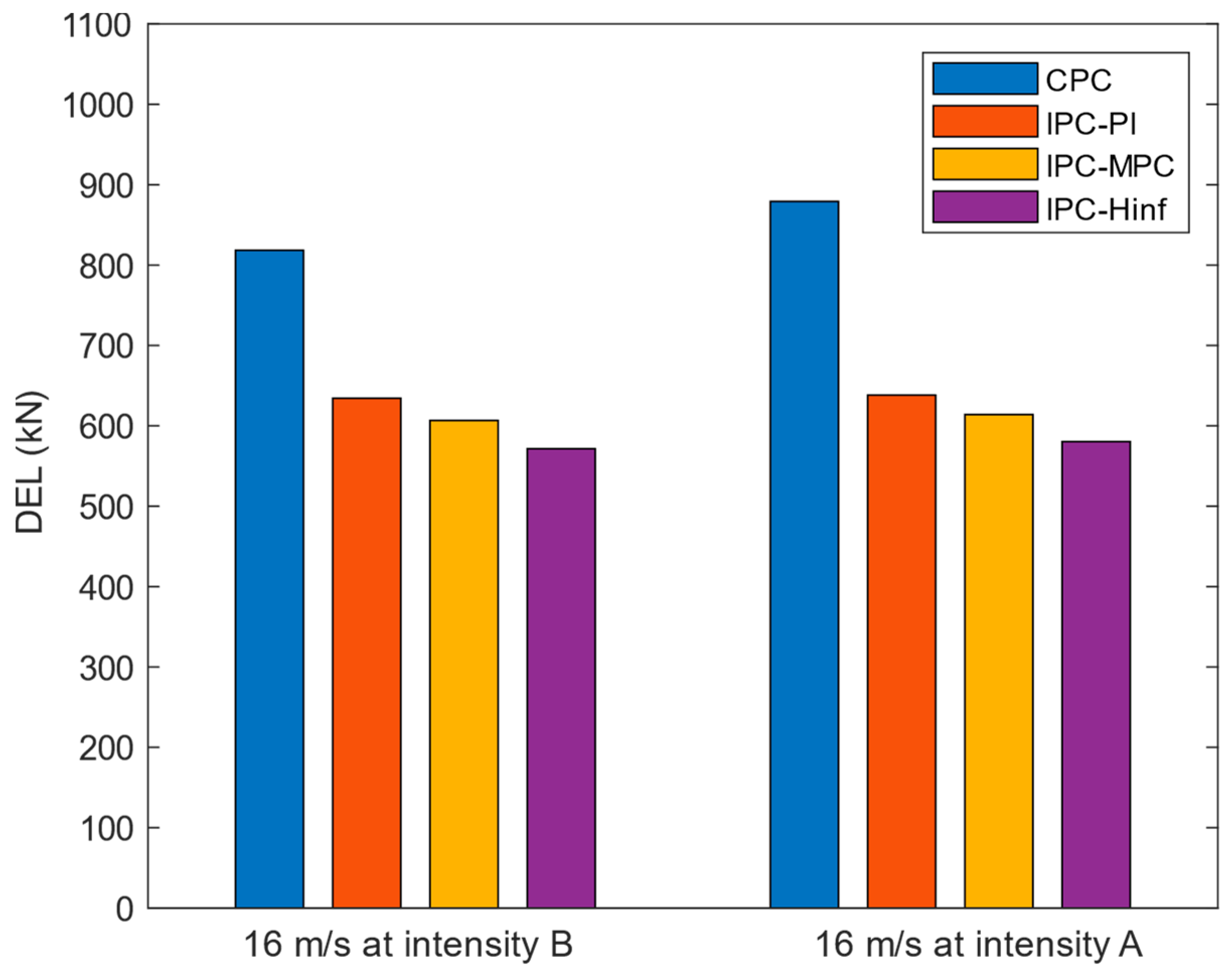
- The generalizability of the reported controllers is projected using the different operating conditions. All reported controllers are applied with wind fields of different average wind speeds and turbulence intensities as recommended by IEC standards. The quantitative results of the comparison of the performance of the reported controllers are carried out. Also, the performance of controllers is tested with EOG-type wind speeds to study the transient responses, signifying the better performance of the controller in terms of the reduced BRBMs and standard deviation of generator speed compared to reported controllers in the EOG conditions. Furthermore, a detailed DEL analysis is carried out at wind speeds of 14 m/s and 16 m/s with two turbulent intensities to prove the effectiveness of the IPCs. Significant improvement in the case of IPCs is observed from DEL plots compared to CPC. Thus, turbines will require less maintenance, have longer lifetimes, and be more reliable. All simulation studies have been carried out using the high-fidelity aeroelastic FAST-based simulation package.
- Future studies will consider developing a controller to exploit blade pitch control for reducing loads in the below-rated wind conditions as long as the power generation remains unaffected and will also investigate the further reduction of higher-order harmonics. Future studies will also focus on implementing an online tuning method for the MPC. IPC can also be made to work in a wide range of operation points using the gain scheduling technique. The application of the reported controllers on different wind turbines (offshore and floating) will be considered in the future study of this work.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Global Wind Energy Council. Gwec/Global Wind Report 2021; Global Wind Energy Council: Brussels, Belgium, 2021. [Google Scholar]
- Barlas, T.; Van, K.G. Review of state of the art in smart rotor control research for wind turbines. Prog. Aerosp. Sci. 2010, 46, 1–27. [Google Scholar] [CrossRef]
- Lu, Q.; Bowyer, R.; Jones, B.L. Analysis and design of Coleman transform-based individual pitch controllers for wind-turbine load reduction. Wind Energy 2015, 18, 1451–1468. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Wright, A.; Johnson, K. Independent Blade Pitch Controller Design for a Three-Bladed Turbine Using Disturbance Accommodating Control. In Proceedings of the American Control Conference, Boston, MA, USA, 6–8 July 2016; pp. 2301–2306. [Google Scholar]
- Pao, L.Y.; Johnson, K.E. A tutorial on the dynamics and control of wind turbines and wind farms. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 2076–2089. [Google Scholar]
- Muljadi, E.; Butterfield, C.P. Pitch-controlled variable-speed wind turbine generation. IEEE Trans. Ind. Appl. 2001, 37, 240–246. [Google Scholar] [CrossRef] [Green Version]
- Vali, M.; Van Wingerden, J.; Kühn, M. Optimal Multivariable Individual Pitch Control for Load Reduction of Large Wind Turbines. In Proceedings of the American Control Conference, Boston, MA, USA, 6–8 July 2016; pp. 3163–3169. [Google Scholar]
- Coleman, R.P.; Feingold, A.M. Theory of Self-Excited Mechanical Oscillations of Helicopter Rotors with Hinged Blades; National Advisory Committee for Aeronautics Report/Patent: (NACA-TR-1351); NASA: Washington, DC, USA, 1958. [Google Scholar]
- Vas, P. Electrical Machines and Drives: A Space-Vector Theory Approach; Oxford University Press: New York, NY, USA, 1993. [Google Scholar]
- Bossanyi, E.A. Individual blade pitch control for load reduction. Wind Energy 2003, 6, 119–128. [Google Scholar] [CrossRef]
- Bossanyi, E.A.; Fleming, P.A.; Wright, A.D. Validation of individual pitch control by field tests on two- and three-bladed wind turbines. IEEE Trans. Control Syst. Technol. 2013, 21, 1067–1078. [Google Scholar] [CrossRef]
- Van Engelen, T.G.; Van Der Hooft, E.L. Individual Pitch Control Inventory; Technical Report ECN-E-03-138; Energy Research Centre of the Netherlands ECN: Petten, The Netherlands, 2005. [Google Scholar]
- Selvam, K.; Kanev, S.; Van Wingerden, J.; Van Engelen, T.; Verhaegen, M. Feedback–feedforward individual pitch control for wind turbine load reduction. Int. J. Robust Nonlinear Control 2009, 19, 72–91. [Google Scholar] [CrossRef] [Green Version]
- Geyler, M.; Caselitz, P. Robust multivariable pitch control design for load reduction on large wind turbines. J. Sol. Energy Eng. 2008, 130, 031014. [Google Scholar] [CrossRef]
- Bossanyi, E.A. Further load reductions with individual pitch control. Wind Energy 2005, 8, 481–485. [Google Scholar] [CrossRef]
- Van Solingen, E.; Navalkar, S.; Van Wingerden, J.W. Experimental wind tunnel testing of linear individual pitch control for two-bladed wind turbines. J. Phys. Conf. Ser. 2014, 524, 012056. [Google Scholar] [CrossRef]
- Stol, K.A.; Moll, H.G.; Bir, G.; Namik, H. A comparison of multi-blade coordinate transformation and direct periodic techniques for wind turbine control design. In Proceedings of the 47th AIAA/ASME, Orlando, FL, USA, 5–8 January 2009. [Google Scholar]
- Nourdine, S.; Camblong, H.; Vechiu, I.; Tapia, G. Comparison of wind turbine LQG controllers using Individual Pitch Control to alleviate fatigue loads. In Proceedings of the 18th Mediterranean Conference on Control and Automation, MED’10, Marrakech, Morocco, 23–25 June 2010; pp. 1591–1596. [Google Scholar]
- Park, S.; Nam, Y. Two LQRI based Blade Pitch Controls for Wind Turbines. Energies 2012, 5, 1998–2016. [Google Scholar] [CrossRef]
- Doyle, J. Guaranteed margins for LQG regulators. IEEE Trans. Autom. Control 1978, 23, 756–757. [Google Scholar] [CrossRef] [Green Version]
- McFarlane, D.; Glover, K. A loop shaping design procedure using H∞ synthesis. IEEE Trans. Autom. Control 1992, 37, 759–769. [Google Scholar] [CrossRef]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Reddy, Y.-S.; Hur, S.-H. Comparison of Optimal Control Designs for a 5 MW Wind Turbine. Appl. Sci. 2021, 11, 8774. [Google Scholar] [CrossRef]
- Song, Y.; Jeon, T.; Paek, I.; Dugarjav, B. Design and Validation of Pitch H-Infinity Controller for a Large Wind Turbine. Energies 2022, 15, 8763. [Google Scholar] [CrossRef]
- Vinnicombe, G. Uncertainty and Feedback, H Loop-Shaping and the V-Gap Metric; Imperial College Press (Verlag): London, UK, 2000. [Google Scholar]
- Hyde, R.A.; Glover, K.; Shanks, G.T. VSTOL first flight of an H-infinity control law. Comput. Control Eng. J. 1995, 6, 11–16. [Google Scholar] [CrossRef]
- Chu, Y.; Glover, K.; Dowling, A.P. Control of combustion oscillations via H∞ loop-shaping, µ-analysis and Integral Quadratic Constraints. Automatica 2003, 39, 219–231. [Google Scholar] [CrossRef]
- Dahan, J.A.; Morgans, A.S.; Lardeau, S. Feedback control for form-drag reduction on a bluff body with a blunt trailing edge. J. Fluid Mech. 2012, 704, 360–387. [Google Scholar] [CrossRef] [Green Version]
- Mirzaei, M.; Soltani, M.; Poulsen, N.; Niemann, H. An MPC approach to individual pitch control of wind turbines using uncertain LIDAR measurements. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 490–495. [Google Scholar]
- Routray, A.; Hur, S.-H. Full Operational Envelope Control of a Wind Turbine Using Model Predictive Control. IEEE Access 2022, 10, 121940–121956. [Google Scholar] [CrossRef]
- Lio, W.H.; Rossiter, J.A.; Jones, B.L. A review on applications of model predictive control to wind turbines. In Proceedings of the UKACC International Conference on Control (CONTROL), Loughborough, UK, 9–11 July 2014; pp. 673–678. [Google Scholar]
- Routray, A.; Reddy, Y.S.; Hur, S.-H. Predictive Control of a Wind Turbine Based on Neural Network-Based Wind Speed Estimation. Sustainability 2023, 15, 9697. [Google Scholar] [CrossRef]
- Ungurán, R.; Petrovic, V.; Pao, L.Y.; Kühn, M. Smart rotor control of wind turbines under actuator limitations. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 3474–3481. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Nat. Renewable Energy Lab. (NREL) Tech. Rep. NREL/TP-500-38060; NREL: Golden, CO, USA, 2009. [Google Scholar]
- Jonkman, J.M.; Buhl, M.L., Jr. Fast User’s Guide; Nat. Renewable Energy Lab. (NREL), Tech. Rep. NREL/EL-500-38230; NREL: Golden, CO, USA, 2005. [Google Scholar]
- McFarlane, D.; Glover, K. Robust Controller Design using Normalized Coprime Factor Plant Descriptions; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 1990; p. 138. [Google Scholar]
- IEC 61400-1; Wind Turbines-Part 1: Design Requirements. 3rd ed. International Electrotechnical Commission: Geneva, Switzerland, 2005.
- Jonkman, B. TurbSim User’s Guide (Technical Report); Nat. Renewable Energy Lab. (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Hayman, G.J.; Buhl, M., Jr. Mlife Users Guide for Version 1.00 (Tech. Rep.); Nat. Renewable Energy Lab. (NREL): Golden, CO, USA, 2012. [Google Scholar]
- Leith, D.J.; Leithead, W.E. Appropriate realization of gain-scheduled controllers with application to wind turbine regulation. Int. J. Control 1996, 65, 223–248. [Google Scholar] [CrossRef]
- Li, J.; Wang, S.; Hou, Z.; Zhao, J. Multivariable Model-Free Adaptive Controller Design with Differential Characteristic for Load Reduction of Wind Turbines. IEEE Trans. Energy Convers. 2022, 37, 1106–1114. [Google Scholar] [CrossRef]
- Wheeler, L. Wind Turbine Collective and Individual Pitch Control Using Quantitative Feedback Theory. Master’s Thesis, Case Western Reserve University, Cleveland, OH, USA, 2017. [Google Scholar]
- Simley, E.; Pao, L.Y. A longitudinal spatial coherence model for wind evolution based on large-eddy simulation. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 3708–3714. [Google Scholar]
- Laks, J.; Simley, E.; Pao, L. A spectral model for evaluating the effect of wind evolution on wind turbine preview control. In Proceedings of the American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 3673–3679. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units |
|---|---|---|
| Turbine power | 5 | MW |
| Diameter of blade | 126 | m |
| Diameter of hub | 3 | m |
| Wind speed (cut in and cut out) | 3, 25 | m/s |
| Height of hub | 90 | m |
| Rotor speed (rated) | 12.1 | rpm |
| Std. Dev. Gen. Speed (rpm) | Mean Wind Speed | |
|---|---|---|
| 14 m/s | 16 m/s | |
| PI | 0.1823 | 0.1841 |
| MPC % Reduction | 0.0794 | 0.0836 |
| 56.44% | 54.59% | |
% Reduction | 0.0210 | 0.0214 |
| 88.48% | 88.37% | |
| Std. Dev. BRBMs (kN.m) | Mean Wind Speed | |
|---|---|---|
| 14 m/s | 16 m/s | |
| CPC | ||
| IPC-PI | ||
| IPC-MPC | 962.7452 | |
| IPC- | 953.0034 | |
| Std. Dev. (kN.m) | At Wind Speed (14 m/s) | |
|---|---|---|
| Mtilt | Myaw | |
| CPC | ||
| IPC-PI | ||
| IPC-MPC | ||
| IPC- | ||
| Std. Dev. (kN.m) | At Wind Speed (16 m/s) | |
|---|---|---|
| Mtilt | Myaw | |
| CPC | ||
| IPC-PI | ||
| IPC-MPC | ||
| IPC- | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Routray, A.; Sivakumar, N.; Hur, S.-h.; Bang, D.-j. A Comparative Study of Optimal Individual Pitch Control Methods. Sustainability 2023, 15, 10933. https://doi.org/10.3390/su151410933
Routray A, Sivakumar N, Hur S-h, Bang D-j. A Comparative Study of Optimal Individual Pitch Control Methods. Sustainability. 2023; 15(14):10933. https://doi.org/10.3390/su151410933
Chicago/Turabian StyleRoutray, Abhinandan, Nitin Sivakumar, Sung-ho Hur, and Deok-je Bang. 2023. "A Comparative Study of Optimal Individual Pitch Control Methods" Sustainability 15, no. 14: 10933. https://doi.org/10.3390/su151410933