
An Interactive Multi-Criteria Decision-Making Approach for Autonomous Vehicles and Distributed Resources Based on Logistic Systems: Challenges for a Sustainable Future

 ,
, 
 , and
, and 
Abstract
:1. Introduction
1.1. Contributions of the Paper
- ➢
- Selecting the optimal AV for optimized industrial logistics to enhance transportation and delivery;
- ➢
- Introducing a comprehensive approach by considering the criteria holistically (i.e., price, environmental friendliness, battery capacity of the autonomous vehicle, lane management, velocity of the autonomous vehicle, the park and ride system, the vehicular communication systems, and the capacity of the autonomous vehicle). The suggested approach also addresses various sources of uncertainty to accommodate the opinions of the most realistic decision-makers;
- ➢
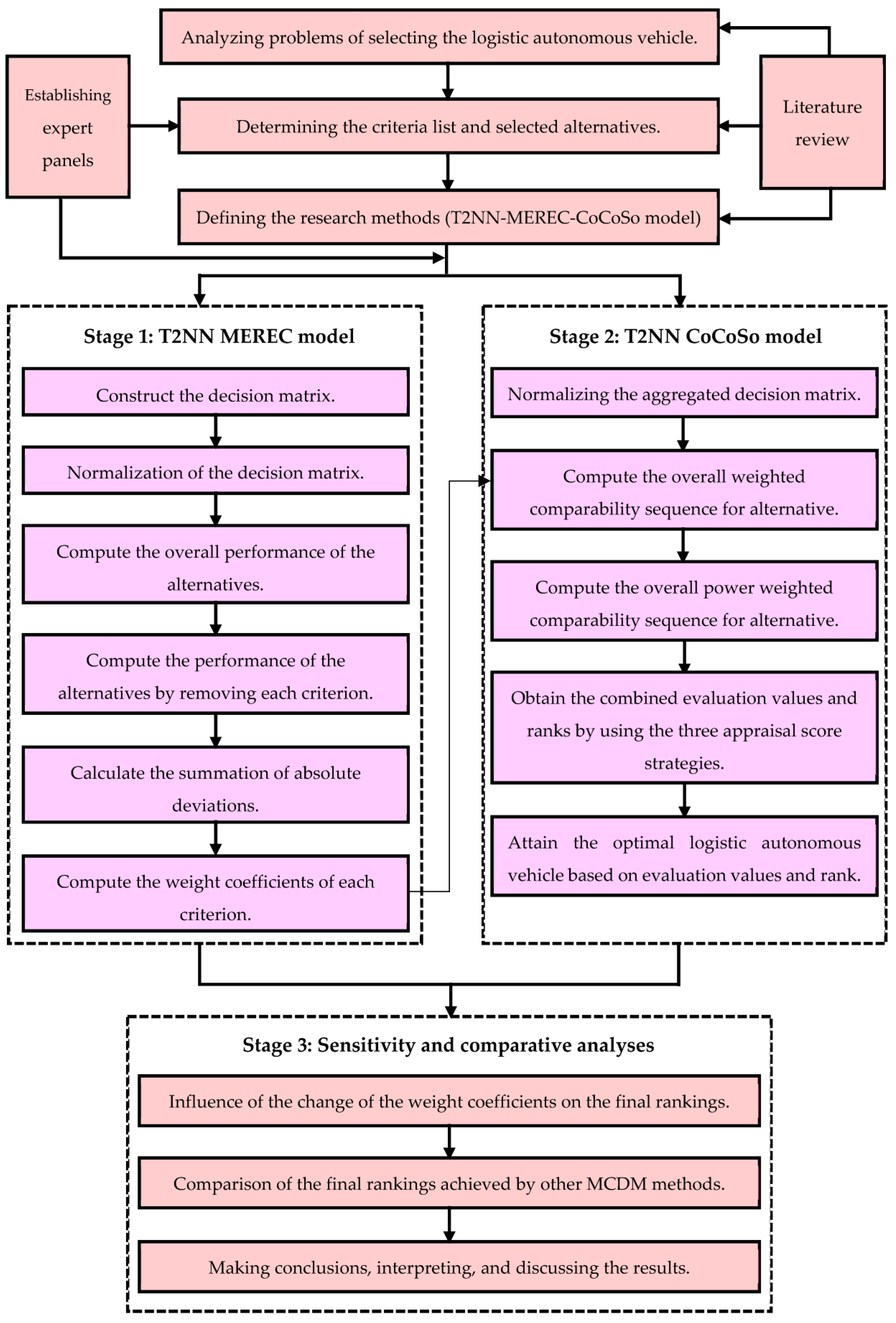
- Developing a reliable and resilient MCDM approach combining the MEREC method and the CoCoSo method based on the T2NN for the assessment of logistic AVs;
- ➢
- The suggested T2NN–MEREC–CoCoSo approach improves performance and decreases the cost function and calculation time, according to the numerical findings;
- ➢
- Providing a decision-making approach that is more robust and stable, with the ability to express separate membership functions in a neutrosophic environment, as well as assigning more degrees of freedom to experts and achieving more accurate outcomes;
- ➢
- Finally, this research presents a sensitivity analysis and a comparative analysis to prove the strength, robustness, and stability of the proposed approach and to clarify different opportunities with the empirical results drawn from the research.
1.2. Originality of the Paper
1.3. Organization of the Paper
2. Literature Review
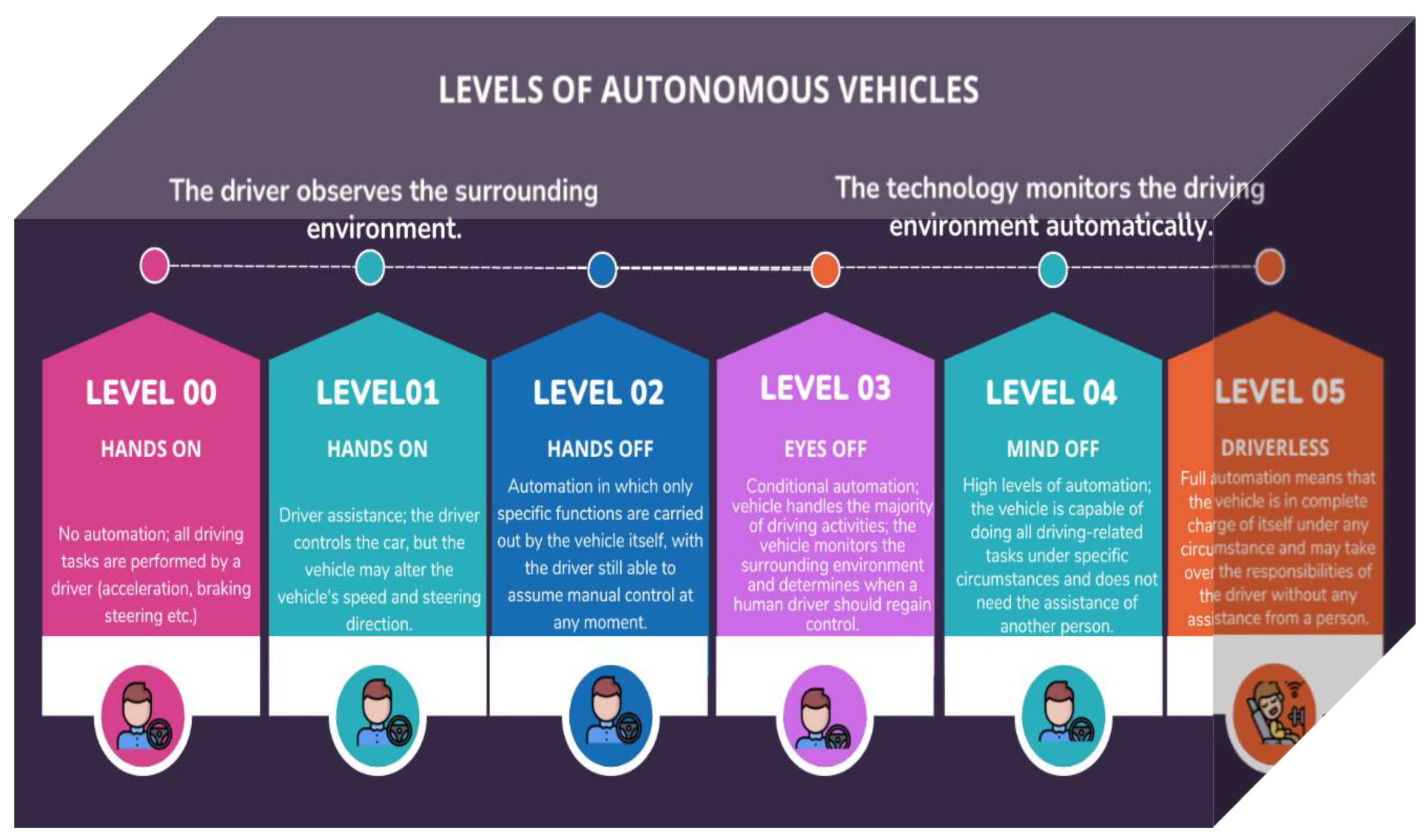
2.1. Autonomous Vehicles
2.2. T2NN Environment
2.3. MEREC and CoCoSo Methods
3. Materials and Methods
3.1. Preliminaries
- a.
- Addition “”
- b.
- Multiplication “”
- c.
- Scalar Multiplication
- d.
- Power
3.2. The Proposed MCDM Methodology
4. Problem Definition
4.1. Illustration of Problem
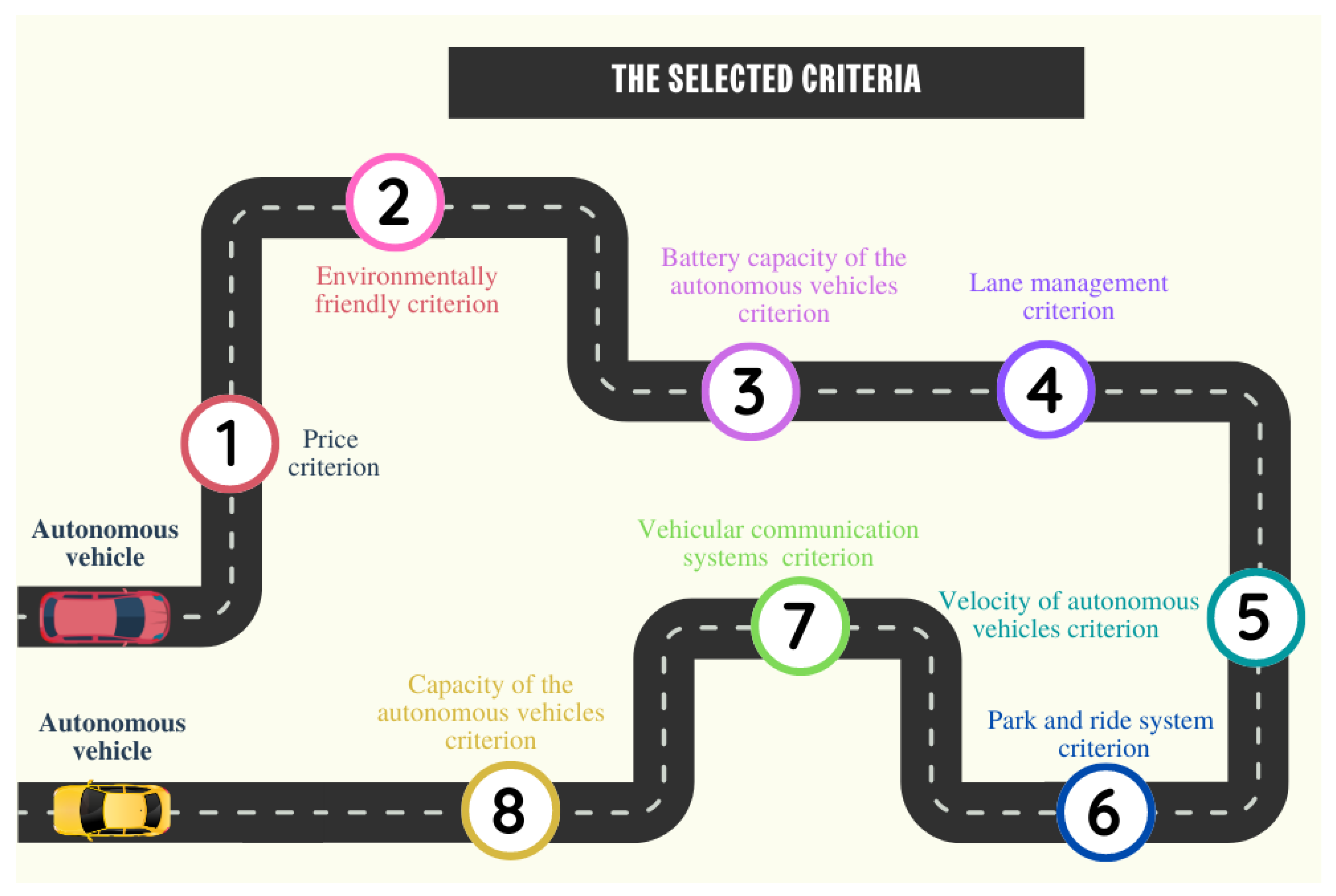
4.2. Description of the Decision-Making Criteria
- ➢
- Price ()
- ➢
- Environmentally friendly ()
- ➢
- Battery capacity of the autonomous vehicles ()
- ➢
- Lane management ()
- ➢
- Velocity of autonomous vehicles ()
- ➢
- Park and ride system ()
- ➢
- Vehicular communication systems ()
- ➢
- Capacity of the autonomous vehicles ()
5. Experimental Results
5.1. Application of the Suggested T2NN–MEREC–CoCoSo Approach
5.2. Results Analysis and Discussion
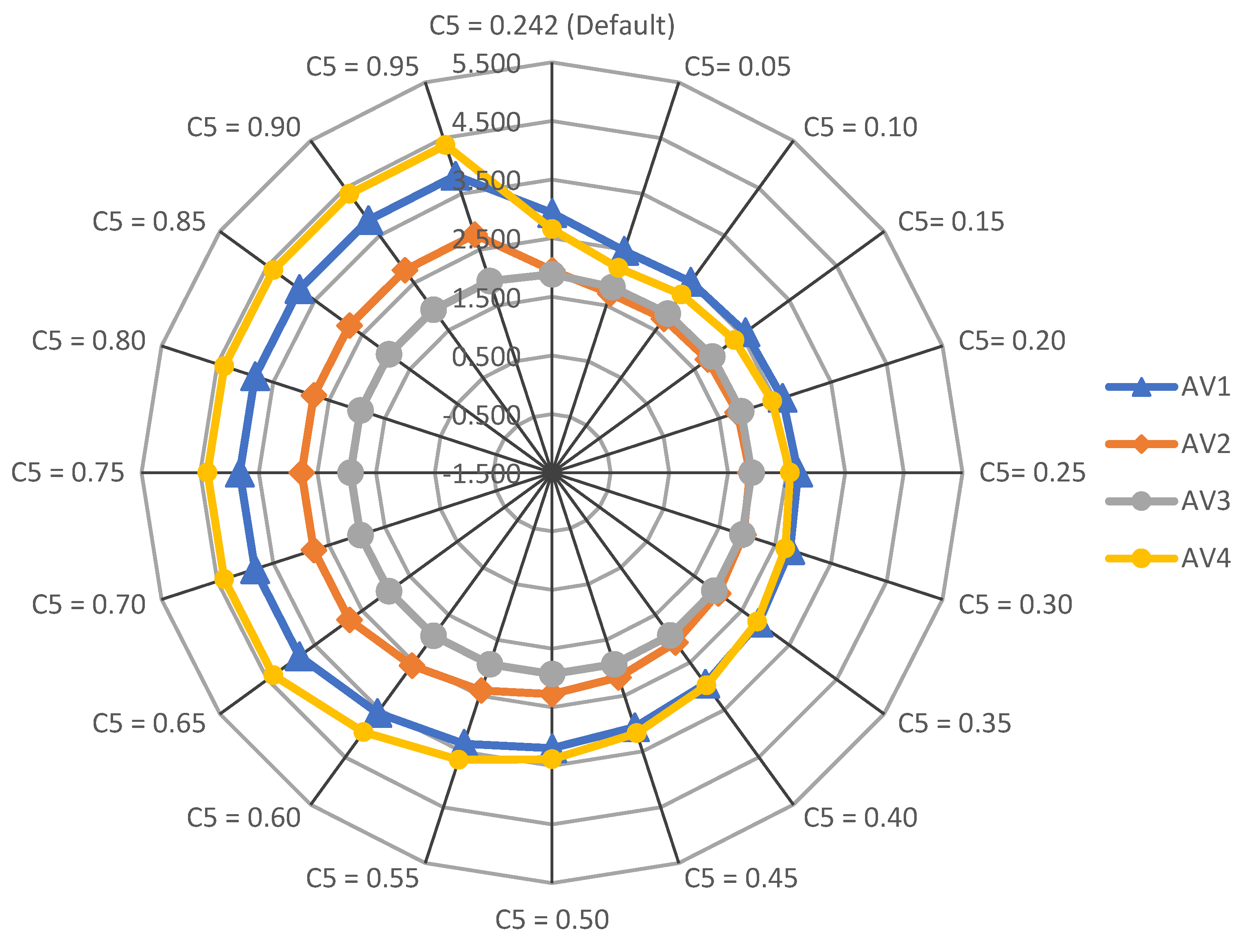
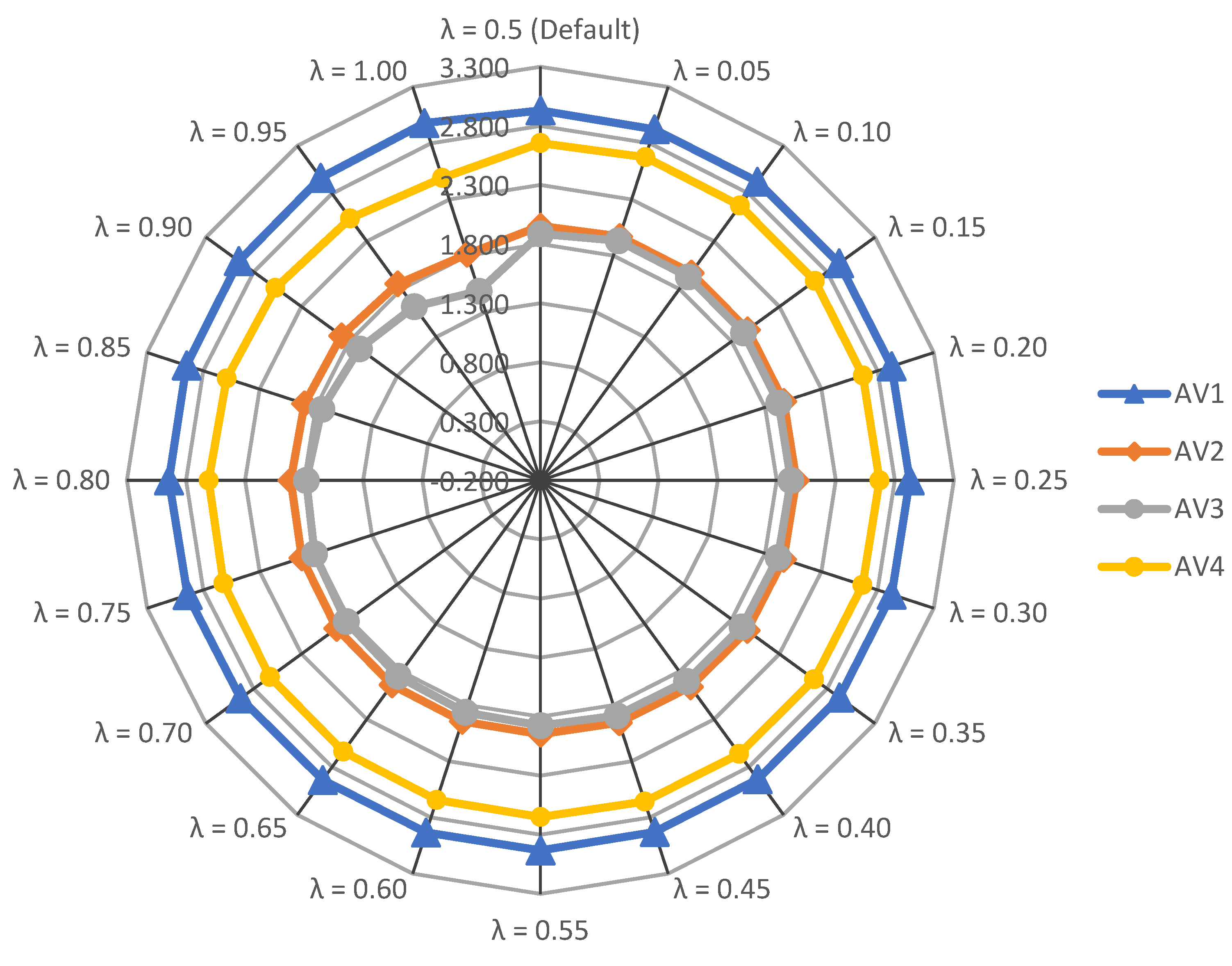
5.3. Sensitivity Analysis
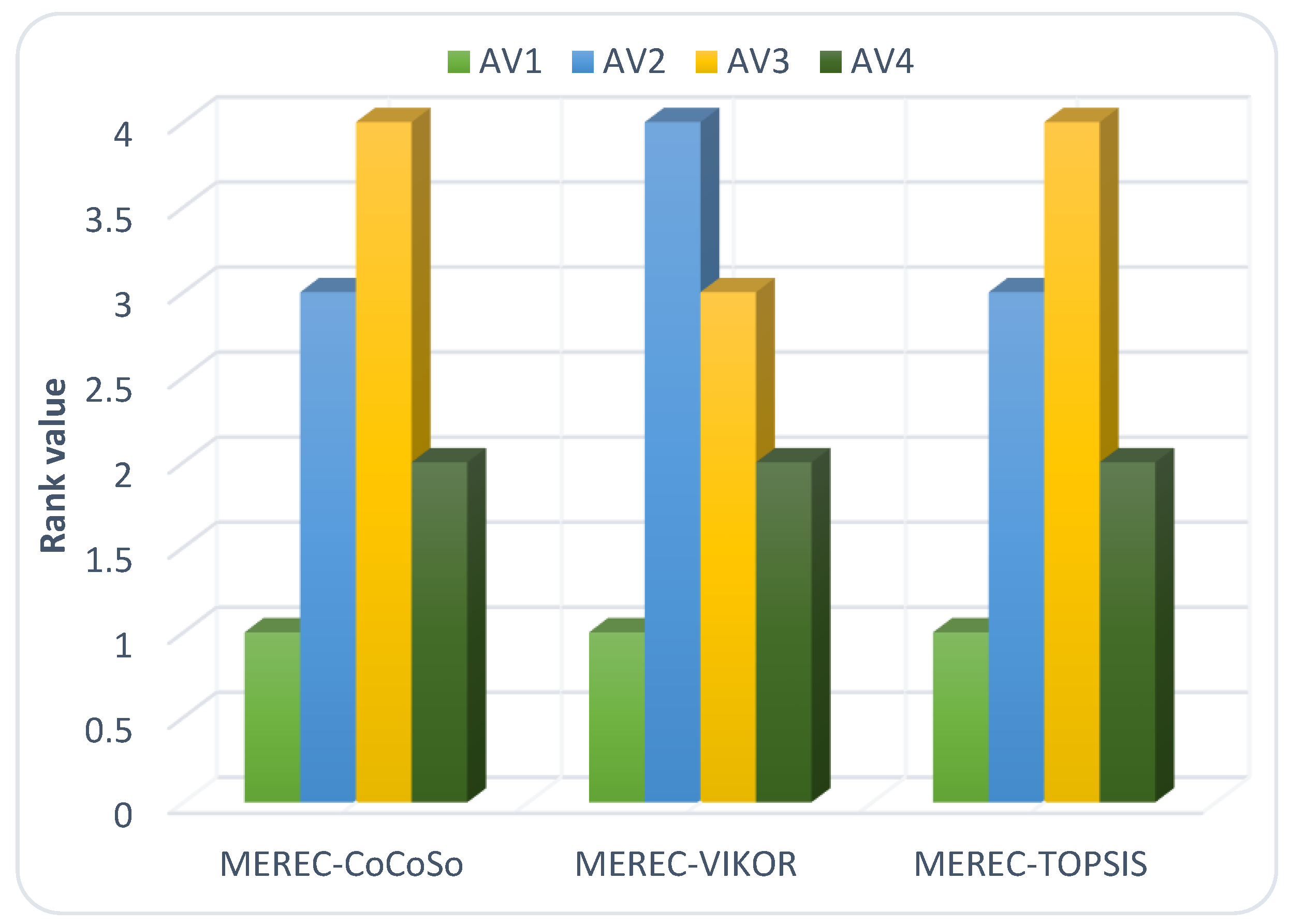
5.4. Comparative Analysis
6. Concluding Remarks
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Alternatives | DMs | Criteria | |
|---|---|---|---|
| Alternatives | DMs | Criteria | |
| Alternatives | DMs | Criteria | |
| Alternatives | DMs | Criteria | |
| Alternatives | Criteria | |
|---|---|---|
| Alternatives | Criteria | |
| Alternatives | Criteria | |
| Alternatives | Criteria | |
| Alternatives | Criteria | |||||||
|---|---|---|---|---|---|---|---|---|
| 0.875 | 0.797 | 1.000 | 0.708 | 0.520 | 0.502 | 0.511 | 0.380 | |
| 1.000 | 1.000 | 1.000 | 1.000 | 0.585 | 1.000 | 0.720 | 0.756 | |
| 1.000 | 0.647 | 0.875 | 0.414 | 1.000 | 0.889 | 0.904 | 0.672 | |
| 1.000 | 0.832 | 0.875 | 0.797 | 0.414 | 0.575 | 1.000 | 1.000 | |
| Alternatives | Criteria | Overall Performance | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 0.875 | 0.797 | 1.000 | 0.708 | 0.520 | 0.502 | 0.511 | 0.380 | 0.379 | |
| 1.000 | 1.000 | 1.000 | 1.000 | 0.585 | 1.000 | 0.720 | 0.756 | 0.134 | |
| 1.000 | 0.647 | 0.875 | 0.414 | 1.000 | 0.889 | 0.904 | 0.672 | 0.230 | |
| 1.000 | 0.832 | 0.875 | 0.797 | 0.414 | 0.575 | 1.000 | 1.000 | 0.221 | |
| Alternatives | Criteria | |||||||
|---|---|---|---|---|---|---|---|---|
| 0.875 | 0.797 | 1.000 | 0.708 | 0.520 | 0.502 | 0.511 | 0.380 | |
| 1.000 | 1.000 | 1.000 | 1.000 | 0.585 | 1.000 | 0.720 | 0.756 | |
| 1.000 | 0.647 | 0.875 | 0.414 | 1.000 | 0.889 | 0.904 | 0.672 | |
| 1.000 | 0.832 | 0.875 | 0.797 | 0.414 | 0.575 | 1.000 | 1.000 | |
| Alternatives | Criteria | |||||||
|---|---|---|---|---|---|---|---|---|
| 0.000 | 0.044 | 0.000 | 0.083 | 0.158 | 0.149 | 0.122 | 0.181 | |
| 0.014 | 0.000 | 0.000 | 0.166 | 0.121 | 0.000 | 0.049 | 0.036 | |
| 0.014 | 0.095 | 0.031 | 0.000 | 0.000 | 0.019 | 0.013 | 0.054 | |
| 0.014 | 0.035 | 0.031 | 0.108 | 0.242 | 0.111 | 0.000 | 0.000 | |
| Alternatives | Criteria | |||||||
|---|---|---|---|---|---|---|---|---|
| 0.000 | 0.744 | 0.000 | 0.662 | 0.640 | 0.753 | 0.774 | 0.734 | |
| 0.943 | 0.000 | 0.000 | 0.742 | 0.601 | 0.000 | 0.693 | 0.547 | |
| 0.943 | 0.800 | 0.897 | 0.000 | 0.000 | 0.553 | 0.592 | 0.589 | |
| 0.943 | 0.728 | 0.897 | 0.691 | 0.709 | 0.721 | 0.000 | 0.000 | |
| Cases | Criteria | |||||||
|---|---|---|---|---|---|---|---|---|
| Main case | 0.014 | 0.095 | 0.031 | 0.166 | 0.242 | 0.149 | 0.122 | 0.181 |
| Case 0.05 | 0.046 | 0.123 | 0.063 | 0.191 | 0.050 | 0.154 | 0.149 | 0.205 |
| Case 0.10 | 0.044 | 0.116 | 0.059 | 0.181 | 0.100 | 0.146 | 0.141 | 0.194 |
| Case 0.15 | 0.041 | 0.110 | 0.056 | 0.171 | 0.150 | 0.138 | 0.133 | 0.184 |
| Case 0.20 | 0.039 | 0.104 | 0.053 | 0.161 | 0.200 | 0.130 | 0.125 | 0.173 |
| Case 0.25 | 0.036 | 0.097 | 0.049 | 0.151 | 0.250 | 0.122 | 0.117 | 0.162 |
| Case 0.30 | 0.034 | 0.091 | 0.046 | 0.141 | 0.300 | 0.114 | 0.109 | 0.151 |
| Case 0.35 | 0.031 | 0.084 | 0.043 | 0.130 | 0.350 | 0.106 | 0.102 | 0.140 |
| Case 0.40 | 0.029 | 0.078 | 0.040 | 0.120 | 0.400 | 0.098 | 0.094 | 0.130 |
| Case 0.45 | 0.027 | 0.071 | 0.036 | 0.110 | 0.450 | 0.089 | 0.086 | 0.119 |
| Case 0.50 | 0.024 | 0.065 | 0.033 | 0.100 | 0.500 | 0.081 | 0.078 | 0.108 |
| Case 0.55 | 0.022 | 0.058 | 0.030 | 0.090 | 0.550 | 0.073 | 0.070 | 0.097 |
| Case 0.60 | 0.019 | 0.052 | 0.026 | 0.080 | 0.600 | 0.065 | 0.063 | 0.086 |
| Case 0.65 | 0.017 | 0.045 | 0.023 | 0.070 | 0.650 | 0.057 | 0.055 | 0.076 |
| Case 0.70 | 0.015 | 0.039 | 0.020 | 0.060 | 0.700 | 0.049 | 0.047 | 0.065 |
| Case 0.75 | 0.012 | 0.032 | 0.016 | 0.050 | 0.750 | 0.041 | 0.039 | 0.054 |
| Case 0.80 | 0.010 | 0.026 | 0.013 | 0.040 | 0.800 | 0.033 | 0.031 | 0.043 |
| Case 0.85 | 0.007 | 0.019 | 0.010 | 0.030 | 0.850 | 0.024 | 0.023 | 0.032 |
| Case 0.90 | 0.005 | 0.013 | 0.007 | 0.020 | 0.900 | 0.016 | 0.016 | 0.022 |
| Case 0.95 | 0.002 | 0.006 | 0.003 | 0.010 | 0.950 | 0.008 | 0.008 | 0.011 |
| = 0.05 | 2.924 | 1.971 | 1.933 | 2.676 | = 0.55 | 2.932 | 1.949 | 1.876 | 2.650 |
| = 0.10 | 2.924 | 1.969 | 1.929 | 2.674 | = 0.60 | 2.934 | 1.944 | 1.864 | 2.644 |
| = 0.15 | 2.925 | 1.968 | 1.925 | 2.672 | = 0.65 | 2.936 | 1.939 | 1.849 | 2.638 |
| = 0.20 | 2.925 | 1.966 | 1.920 | 2.670 | = 0.70 | 2.938 | 1.932 | 1.832 | 2.630 |
| = 0.25 | 2.925 | 1.966 | 1.920 | 2.670 | = 0.75 | 2.941 | 1.924 | 1.810 | 2.621 |
| = 0.30 | 2.926 | 1.964 | 1.915 | 2.667 | = 0.80 | 2.945 | 1.914 | 1.783 | 2.609 |
| = 0.35 | 2.927 | 1.962 | 1.909 | 2.665 | = 0.85 | 2.950 | 1.900 | 1.746 | 2.593 |
| = 0.40 | 2.928 | 1.959 | 1.902 | 2.662 | = 0.90 | 2.956 | 1.882 | 1.694 | 2.571 |
| = 0.45 | 2.929 | 1.956 | 1.895 | 2.658 | = 0.95 | 2.965 | 1.855 | 1.617 | 2.540 |
| = 0.50 | 2.930 | 1.953 | 1.886 | 2.654 | = 1.00 | 2.980 | 1.813 | 1.483 | 2.491 |
References
- Rahnamay Bonab, S.; Jafarzadeh Ghoushchi, S.; Deveci, M.; Haseli, G. Logistic autonomous vehicles assessment using decision support model under spherical fuzzy set integrated Choquet Integral approach. Expert Syst. Appl. 2023, 214, 119205. [Google Scholar] [CrossRef]
- Farahani, M.; Zegordi, S.H.; Kashan, A.H. A Tailored Meta-Heuristic for the Autonomous Electric Vehicle Routing Problem Considering the Mixed Fleet. IEEE Access 2023, 11, 8207–8222. [Google Scholar] [CrossRef]
- Hossain, N.U.I.; Sakib, N.; Govindan, K. Assessing the performance of unmanned aerial vehicle for logistics and transportation leveraging the Bayesian network approach. Expert Syst. Appl. 2022, 209, 118301. [Google Scholar] [CrossRef]
- Abosuliman, S.S.; Almagrabi, A.O. Routing and scheduling of intelligent autonomous vehicles in industrial logistics systems. Soft Comput. 2021, 25, 11975–11988. [Google Scholar] [CrossRef]
- Rehman, S.U.; Elrehail, H.; Poulin, M.; Shamout, M.D.; Alzoubi, H.M. Green managerial practices and green performance: A serial mediation model. Int. J. Innov. Stud. 2023, 7, 196–207. [Google Scholar] [CrossRef]
- Krstić, M.; Agnusdei, G.P.; Miglietta, P.P.; Tadić, S.; Roso, V. Applicability of Industry 4.0 Technologies in the Reverse Logistics: A Circular Economy Approach Based on COmprehensive Distance Based RAnking (COBRA) Method. Sustainability 2022, 14, 5632. [Google Scholar] [CrossRef]
- Aal, S.I.A. Neutrosophic Framework for Assessment Challenges in Smart Sustainable Cities based on IoT to Better Manage Energy Resources and Decrease the Urban Environment’s Ecological Impact. Neutrosophic Syst. Appl. 2023, 6, 9–16. [Google Scholar]
- Chejarla, K.C.; Vaidya, O.S.; Kumar, S. MCDM applications in logistics performance evaluation: A literature review. J. Multi-Criteria Decis. Anal. 2022, 29, 274–297. [Google Scholar] [CrossRef]
- Vilas-Boas, J.L.; Rodrigues, J.J.P.C.; Alberti, A.M. Convergence of Distributed Ledger Technologies with Digital Twins, IoT, and AI for fresh food logistics: Challenges and opportunities. J. Ind. Inf. Integr. 2023, 31, 100393. [Google Scholar] [CrossRef]
- Molano, J.I.R.; Lovelle, J.M.C.; Montenegro, C.E.; Granados, J.J.R.; Crespo, R.G. Metamodel for integration of Internet of Things, Social Networks, the Cloud and Industry 4.0. J. Ambient. Intell. Humaniz. Comput. 2018, 9, 709–723. [Google Scholar] [CrossRef]
- Xin, Q.; Alazab, M.; González Crespo, R.; Enrique Montenegro-Marin, C. AI-based quality of service optimization for multimedia transmission on Internet of Vehicles (IoV) systems. Sustain. Energy Technol. Assess. 2022, 52, 102055. [Google Scholar] [CrossRef]
- Onar, S.Ç.; Kahraman, C.; Öztayşi, B. A new hesitant fuzzy KEMIRA approach: An application to adoption of autonomous vehicles. J. Intell. Fuzzy Syst. 2022, 42, 109–120. [Google Scholar] [CrossRef]
- Chen, Y.; Shiwakoti, N.; Stasinopoulos, P.; Khan, S.K. State-of-the-Art of Factors Affecting the Adoption of Automated Vehicles. Sustainability 2022, 14, 6697. [Google Scholar] [CrossRef]
- Kumar, G.; James, A.T.; Choudhary, K.; Sahai, R.; Song, W.K. Investigation and analysis of implementation challenges for autonomous vehicles in developing countries using hybrid structural modeling. Technol. Forecast. Soc. Chang. 2022, 185, 122080. [Google Scholar] [CrossRef]
- Mohamed, S.S.; Abdel-Monem, A.; Tantawy, A.A. Tantawy Neutrosophic MCDM Methodology for Risk Assessment of Autonomous Underwater Vehicles. Neutrosophic Syst. Appl. 2023, 5, 44–52. [Google Scholar]
- Li, J.; Rombaut, E.; Vanhaverbeke, L. A systematic review of agent-based models for autonomous vehicles in urban mobility and logistics: Possibilities for integrated simulation models. Comput. Environ. Urban Syst. 2021, 89, 101686. [Google Scholar] [CrossRef]
- Abdelhafeez, A.; Mohamed, H.K.; Khalil, N.A. Rank and Analysis Several Solutions of Healthcare Waste to Achieve Cost Effectiveness and Sustainability Using Neutrosophic MCDM Model. Neutrosophic Syst. Appl. 2023, 2, 25–37. [Google Scholar]
- Abbas, F.; Ali, J.; Mashwani, W.K.; Syam, M.I. q-rung orthopair fuzzy 2-tuple linguistic clustering algorithm and its applications to clustering analysis. Sci. Rep. 2023, 13, 2789. [Google Scholar] [CrossRef]
- Ali, J.; Naeem, M. r, s, t-Spherical Fuzzy VIKOR Method and Its Application in Multiple Criteria Group Decision Making. IEEE Access 2023, 11, 46454–46475. [Google Scholar] [CrossRef]
- Ali, J. Norm-based distance measure of q-rung orthopair fuzzy sets and its application in decision-making. Comput. Appl. Math. 2023, 42, 184. [Google Scholar] [CrossRef]
- AbdelMouty, A.M.; Abdel-Monem, A. Neutrosophic MCDM Methodology for Assessment Risks of Cyber Security in Power Management. Neutrosophic Syst. Appl. 2023, 3, 53–61. [Google Scholar]
- Keshavarz-Ghorabaee, M.; Amiri, M.; Zavadskas, E.K.; Turskis, Z.; Antucheviciene, J. Determination of Objective Weights Using a New Method Based on the Removal Effects of Criteria (MEREC). Symmetry 2021, 13, 525. [Google Scholar] [CrossRef]
- Yazdani, M.; Zarate, P.; Kazimieras Zavadskas, E.; Turskis, Z. A combined compromise solution (CoCoSo) method for multi-criteria decision-making problems. Manag. Decis. 2019, 57, 2501–2519. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Saleh, M.; Gamal, A.; Smarandache, F. An approach of TOPSIS technique for developing supplier selection with group decision making under type-2 neutrosophic number. Appl. Soft Comput. 2019, 77, 438–452. [Google Scholar] [CrossRef]
- Xu, J.; Zhong, L.; Yao, L.; Wu, Z. An interval type-2 fuzzy analysis towards electric vehicle charging station allocation from a sustainable perspective. Sustain. Cities Soc. 2018, 40, 335–351. [Google Scholar] [CrossRef]
- Raj, A.; Kumar, J.A.; Bansal, P. A multicriteria decision making approach to study barriers to the adoption of autonomous vehicles. Transp. Res. Part A Policy Pract. 2020, 133, 122–137. [Google Scholar] [CrossRef]
- Gokasar, I.; Pamucar, D.; Deveci, M.; Ding, W. A novel rough numbers based extended MACBETH method for the prioritization of the connected autonomous vehicles in real-time traffic management. Expert Syst. Appl. 2023, 211, 118445. [Google Scholar] [CrossRef]
- Simić, V.; Milovanović, B.; Pantelić, S.; Pamučar, D.; Tirkolaee, E.B. Sustainable route selection of petroleum transportation using a type-2 neutrosophic number based ITARA-EDAS model. Inf. Sci. 2023, 622, 732–754. [Google Scholar] [CrossRef]
- Görçün, Ö.F.; Pamucar, D.; Krishankumar, R.; Küçükönder, H. The selection of appropriate Ro-Ro Vessel in the second-hand market using the WASPAS’ Bonferroni approach in type 2 neutrosophic fuzzy environment. Eng. Appl. Artif. Intell. 2023, 117, 105531. [Google Scholar] [CrossRef]
- Zolfani, S.H.; Faruk Görçün, Ö.; Çanakçıoğlu, M.; Tirkolaee, E.B. Efficiency analysis technique with input and output satisficing approach based on Type-2 Neutrosophic Fuzzy Sets: A case study of container shipping companies. Expert Syst. Appl. 2023, 218, 119596. [Google Scholar] [CrossRef]
- Hezam, I.M.; Mishra, A.R.; Rani, P.; Cavallaro, F.; Saha, A.; Ali, J.; Strielkowski, W.; Štreimikienė, D. A hybrid intuitionistic fuzzy-MEREC-RS-DNMA method for assessing the alternative fuel vehicles with sustainability perspectives. Sustainability 2022, 14, 5463. [Google Scholar] [CrossRef]
- Ahamed, A.; Yin, K.; Ng, B.J.; Ren, F.; Chang, V.C.; Wang, J.Y. Life cycle assessment of the present and proposed food waste management technologies from environmental and economic impact perspectives. J. Clean. Prod. 2016, 131, 607–614. [Google Scholar] [CrossRef]
- Su, D.; Zhang, L.; Peng, H.; Saeidi, P.; Tirkolaee, E.B. Technical challenges of blockchain technology for sustainable manufacturing paradigm in Industry 4.0 era using a fuzzy decision support system. Technol. Forecast. Soc. Chang. 2023, 188, 122275. [Google Scholar] [CrossRef]
- Chen, Q.-Y.; Liu, H.-C.; Wang, J.-H.; Shi, H. New model for occupational health and safety risk assessment based on Fermatean fuzzy linguistic sets and CoCoSo approach. Appl. Soft Comput. 2022, 126, 109262. [Google Scholar] [CrossRef]
- Chehri, A.; Mouftah, H.T. Autonomous vehicles in the sustainable cities, the beginning of a green adventure. Sustain. Cities Soc. 2019, 51, 101751. [Google Scholar] [CrossRef]
- Alsalman, A.; Assi, L.N.; Ghotbi, S.; Ghahari, S.; Shubbar, A. Users, planners, and governments perspectives: A public survey on autonomous vehicles future advancements. Transp. Eng. 2021, 3, 100044. [Google Scholar] [CrossRef]
- Deveci, M.; Pamucar, D.; Gokasar, I. Fuzzy Power Heronian function based CoCoSo method for the advantage prioritization of autonomous vehicles in real-time traffic management. Sustain. Cities Soc. 2021, 69, 102846. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, X.; Guo, Q.; Tarko, A. Towards human-like speed control in autonomous vehicles: A mountainous freeway case. Accid. Anal. Prev. 2022, 166, 106566. [Google Scholar] [CrossRef]
- Faddel, S.; Mohamed, A.A.S.; Mohammed, O.A. Fuzzy logic-based autonomous controller for electric vehicles charging under different conditions in residential distribution systems. Electr. Power Syst. Res. 2017, 148, 48–58. [Google Scholar] [CrossRef]
| Expert | Experience (Years) | Occupation | Profession | Academic Degree | Estimated Weight |
|---|---|---|---|---|---|
| 15 | Industry | Senior-Manager | M.Sc. | 0.25 | |
| 20 | Academia | Research Professor | Ph.D. | 0.30 | |
| 10 | Industry | Transport planner | M.Sc. | 0.15 | |
| 20 | Academia | Research Professor | Ph.D. | 0.30 |
| Semantic Terms | Abbreviations | Type-2 Neutrosophic Number |
|---|---|---|
| Extremely not predilection | ENP | |
| Strongly not predilection | SNP | |
| Moderately not predilection | MNP | |
| Evenly predilection | EDP | |
| Moderately predilection | MOP | |
| Strongly predilection | SLP | |
| Extremely predilection | EXP |
| Alternatives | Decision-Makers | Criteria | |||||||
|---|---|---|---|---|---|---|---|---|---|
| EXP | EDP | SLP | SNP | MNP | EDP | EDP | EDP | ||
| EXP | EDP | SLP | MNP | MNP | MOP | MOP | MOP | ||
| EXP | EDP | SLP | SNP | MNP | SLP | SLP | SLP | ||
| EXP | EDP | SLP | MNP | MNP | EXP | EXP | EXP | ||
| SLP | MNP | SLP | EDP | SNP | SNP | EDP | SNP | ||
| SLP | MNP | SLP | EDP | MNP | MNP | EDP | MNP | ||
| SLP | MNP | SLP | EDP | SNP | SNP | EDP | SNP | ||
| SLP | MNP | SLP | EDP | MNP | MNP | EDP | MNP | ||
| SLP | MNP | EXP | ENP | ENP | MNP | MNP | MNP | ||
| SLP | EDP | EXP | ENP | ENP | MNP | MNP | MNP | ||
| SLP | MOP | EXP | ENP | ENP | MNP | MNP | MNP | ||
| SLP | SLP | EXP | ENP | ENP | MNP | MNP | MNP | ||
| SLP | SNP | EXP | MNP | EDP | MOP | ENP | SNP | ||
| SLP | MNP | EXP | MNP | EDP | MOP | SNP | SNP | ||
| SLP | EDP | EXP | MNP | EDP | MOP | MNP | SNP | ||
| SLP | MOP | EXP | MNP | EDP | MOP | EDP | SNP | ||
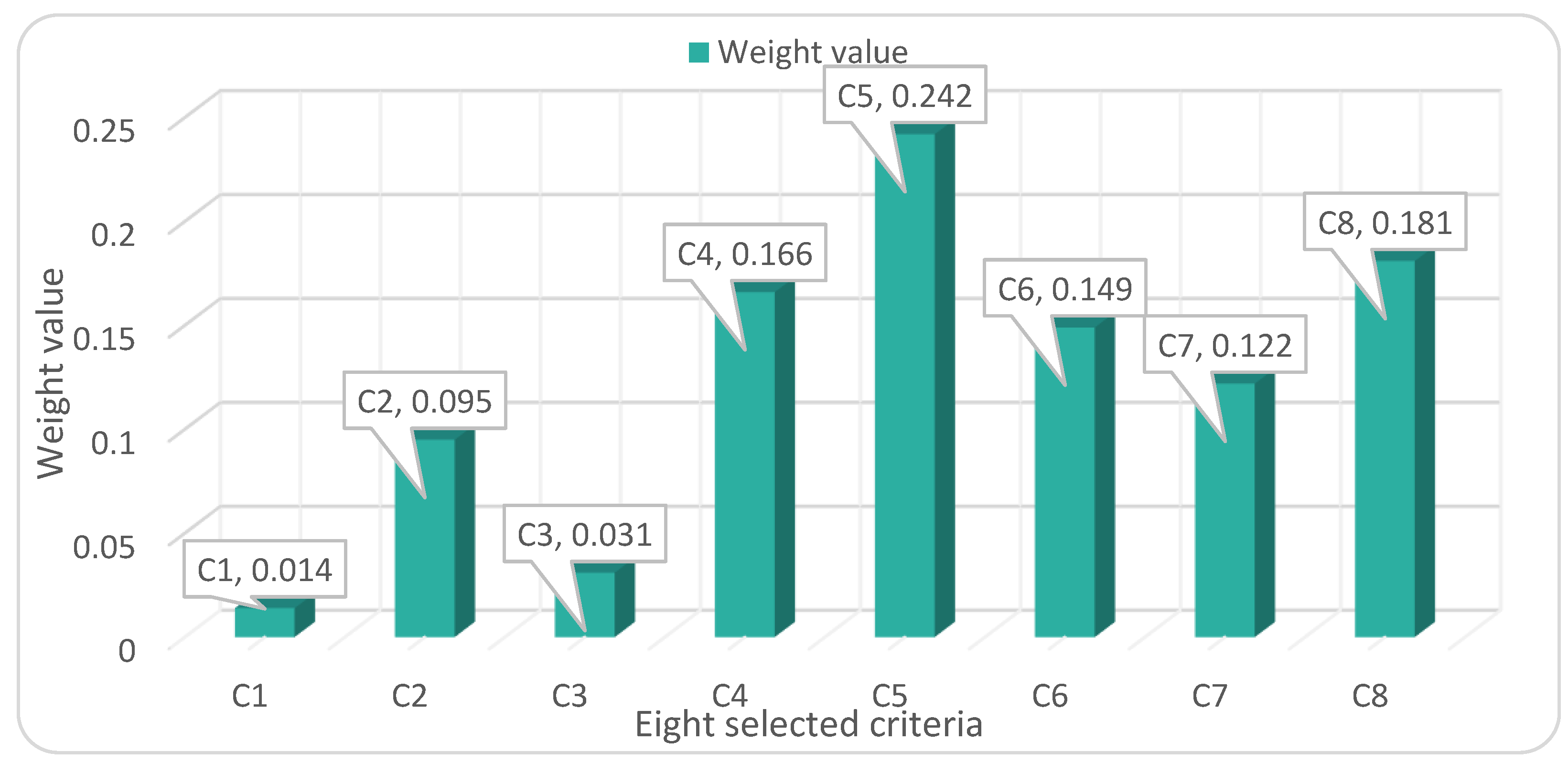
| Criterion | Partial Performance | Removal Effect | Weights | Rank | |||
|---|---|---|---|---|---|---|---|
| Price | 0.368 | 0.134 | 0.230 | 0.221 | 0.012 | 0.014 | 8 |
| 0.360 | 0.134 | 0.185 | 0.203 | 0.083 | 0.095 | 6 | |
| 0.379 | 0.134 | 0.216 | 0.208 | 0.027 | 0.031 | 7 | |
| 0.349 | 0.134 | 0.138 | 0.198 | 0.145 | 0.166 | 3 | |
| 0.322 | 0.073 | 0.230 | 0.129 | 0.211 | 0.242 | 1 | |
| 0.318 | 0.134 | 0.218 | 0.164 | 0.130 | 0.149 | 4 | |
| 0.320 | 0.097 | 0.220 | 0.221 | 0.106 | 0.122 | 5 | |
| 0.293 | 0.103 | 0.189 | 0.221 | 0.158 | 0.181 | 2 | |
| Alternatives | |||||
|---|---|---|---|---|---|
| 0.269 | 4.480 | 0.930 | 2.930 | 1 | |
| 0.208 | 2.707 | 0.721 | 1.953 | 3 | |
| 0.245 | 2.241 | 0.848 | 1.886 | 4 | |
| 0.278 | 3.722 | 0.964 | 2.654 | 2 |
| AVs | Models | ||
|---|---|---|---|
| T2NN–MEREC–CoCoSo | T2NN–MEREC–Fuzzy VIKOR | T2NN–MEREC–Fuzzy TOPSIS | |
| 1 | 1 | 1 | |
| 3 | 4 | 3 | |
| 4 | 3 | 4 | |
| 2 | 2 | 2 | |
| Models | T2NN–MEREC–CoCoSo | T2NN–MEREC–Fuzzy VIKOR | T2NN–MEREC–Fuzzy TOPSIS |
|---|---|---|---|
| T2NN–MEREC–CoCoSo | 1.000 | 0.800 | 1.000 |
| T2NN–MEREC–fuzzy VIKOR | 1.000 | 0.800 | |
| T2NN–MEREC–fuzzy TOPSIS | 1.000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gamal, A.; Abdel-Basset, M.; Hezam, I.M.; Sallam, K.M.; Hameed, I.A. An Interactive Multi-Criteria Decision-Making Approach for Autonomous Vehicles and Distributed Resources Based on Logistic Systems: Challenges for a Sustainable Future. Sustainability 2023, 15, 12844. https://doi.org/10.3390/su151712844
Gamal A, Abdel-Basset M, Hezam IM, Sallam KM, Hameed IA. An Interactive Multi-Criteria Decision-Making Approach for Autonomous Vehicles and Distributed Resources Based on Logistic Systems: Challenges for a Sustainable Future. Sustainability. 2023; 15(17):12844. https://doi.org/10.3390/su151712844
Chicago/Turabian StyleGamal, Abduallah, Mohamed Abdel-Basset, Ibrahim M. Hezam, Karam M. Sallam, and Ibrahim A. Hameed. 2023. "An Interactive Multi-Criteria Decision-Making Approach for Autonomous Vehicles and Distributed Resources Based on Logistic Systems: Challenges for a Sustainable Future" Sustainability 15, no. 17: 12844. https://doi.org/10.3390/su151712844