
Enhancing the Dynamic Stability of Integrated Offshore Wind Farms and Photovoltaic Farms Using STATCOM with Intelligent Damping Controllers
Abstract
:1. Introduction
- (1)
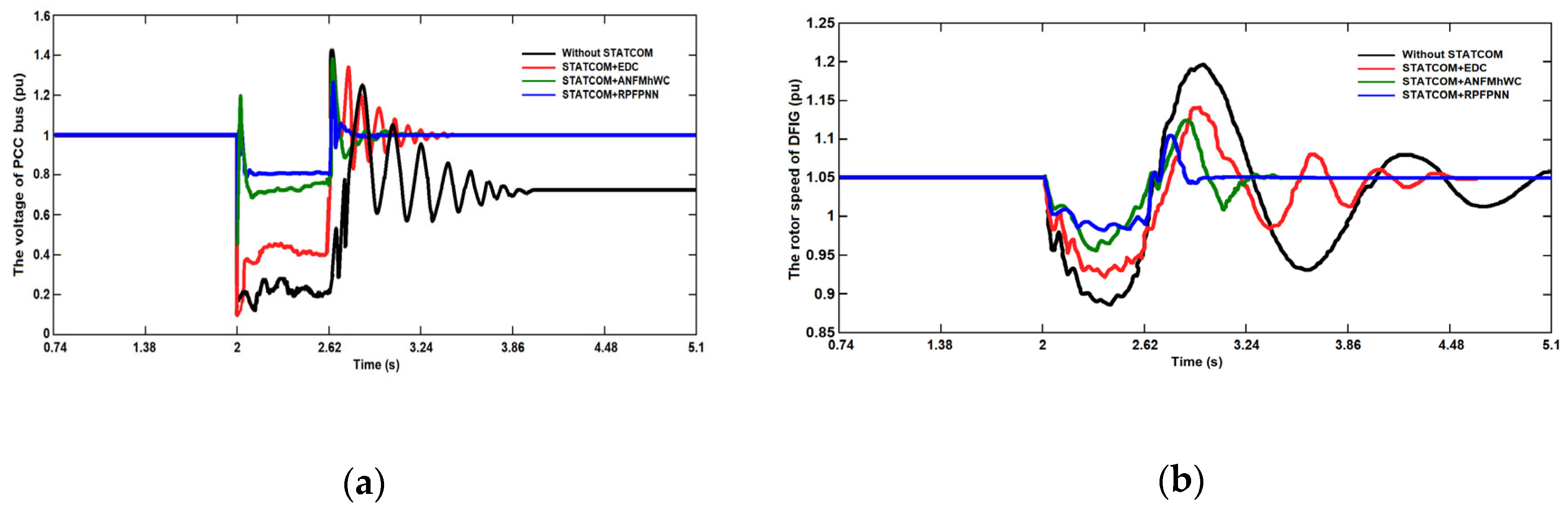
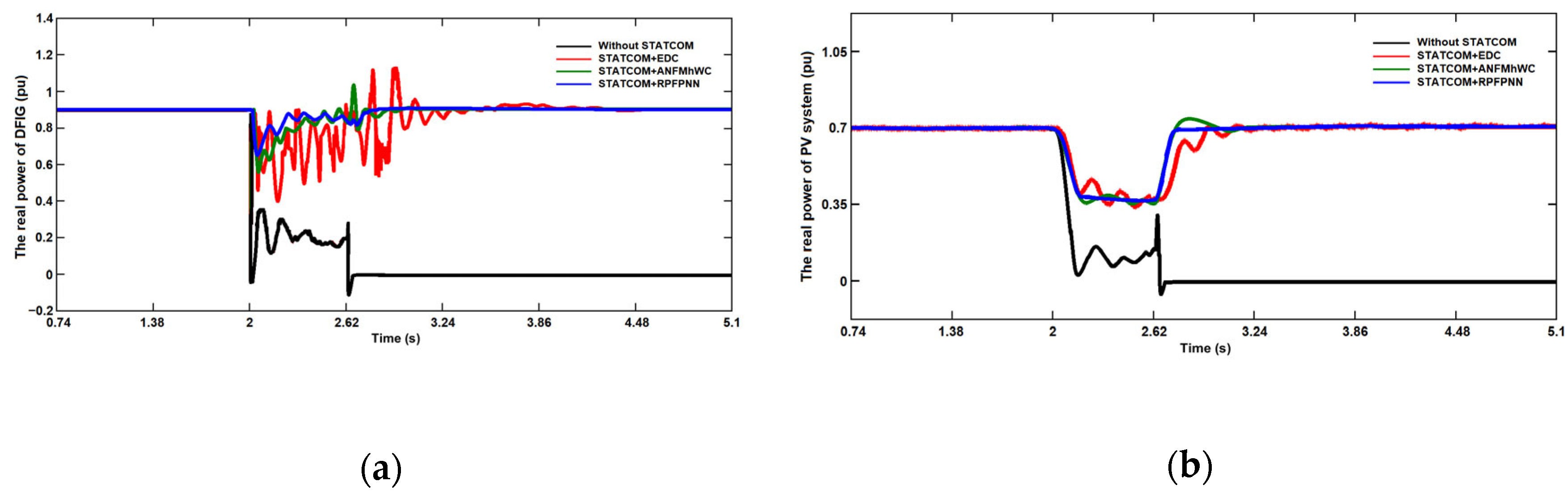
- Using a STATCOM, the power system can be controlled more effectively and transients can be handled better. When the power grid fails, the RPFPNN’s STATCOM can support the grid voltage and improve the abnormal voltage ride-through capability by injecting system reactive power.
- (2)
- The RPFPNN has the sensitivity of the Petri layer to system transient performance. It also has the ability of the probability layer to transform problem features into numerical calculations. This is coupled with the powerful inference process of fuzzy layers, granting the network a stronger control effect and learning ability for complex power system transient performance.
- (3)
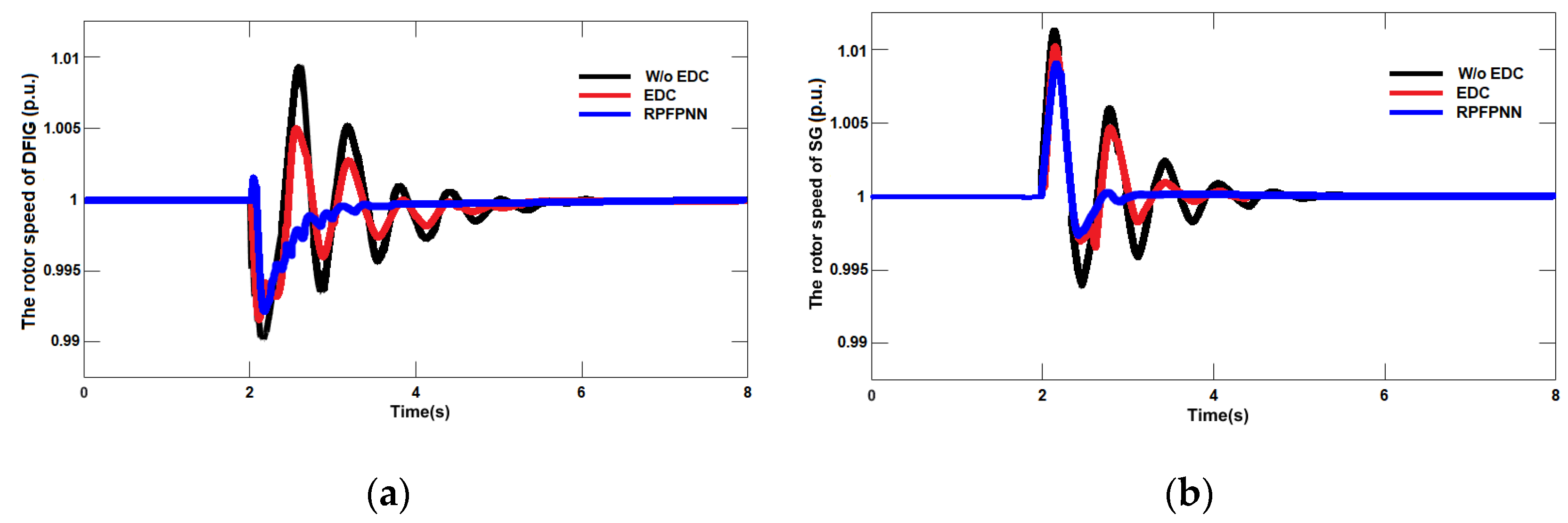
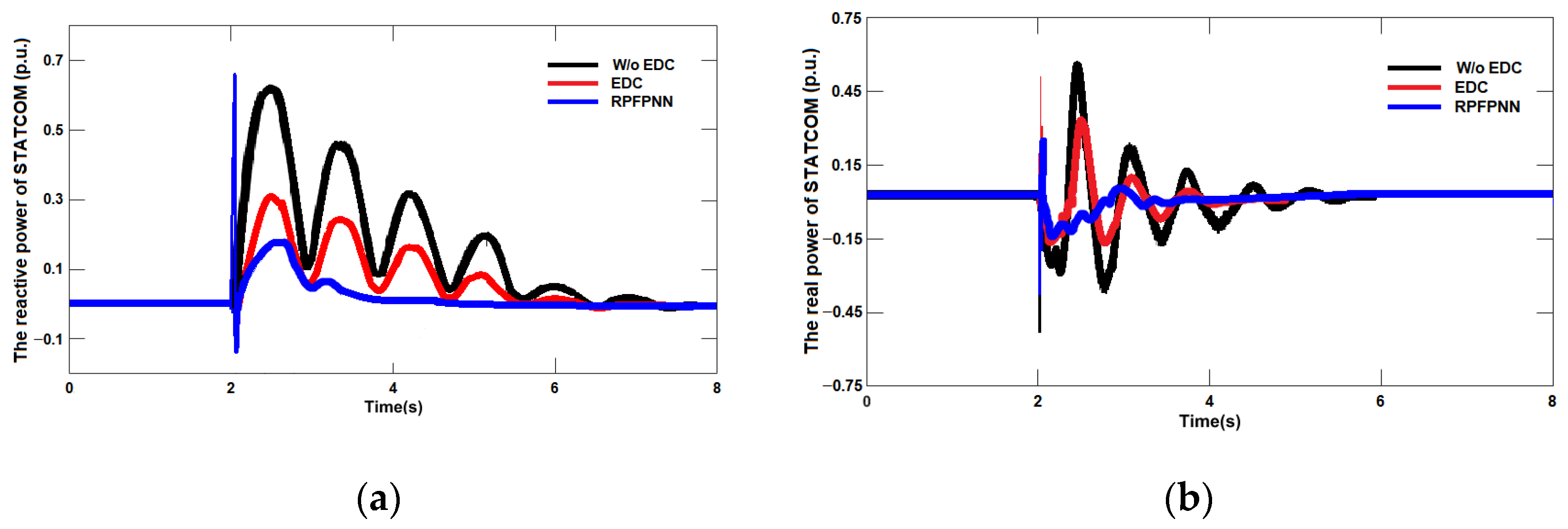
- Under severe three-phase short-circuit faults, the proposed RPFPNN combined with a STATCOM as a system damping controller can exhibit the best damping characteristics and can effectively suppress the transient oscillation phenomenon when large-scale renewable energy is connected to the grid.
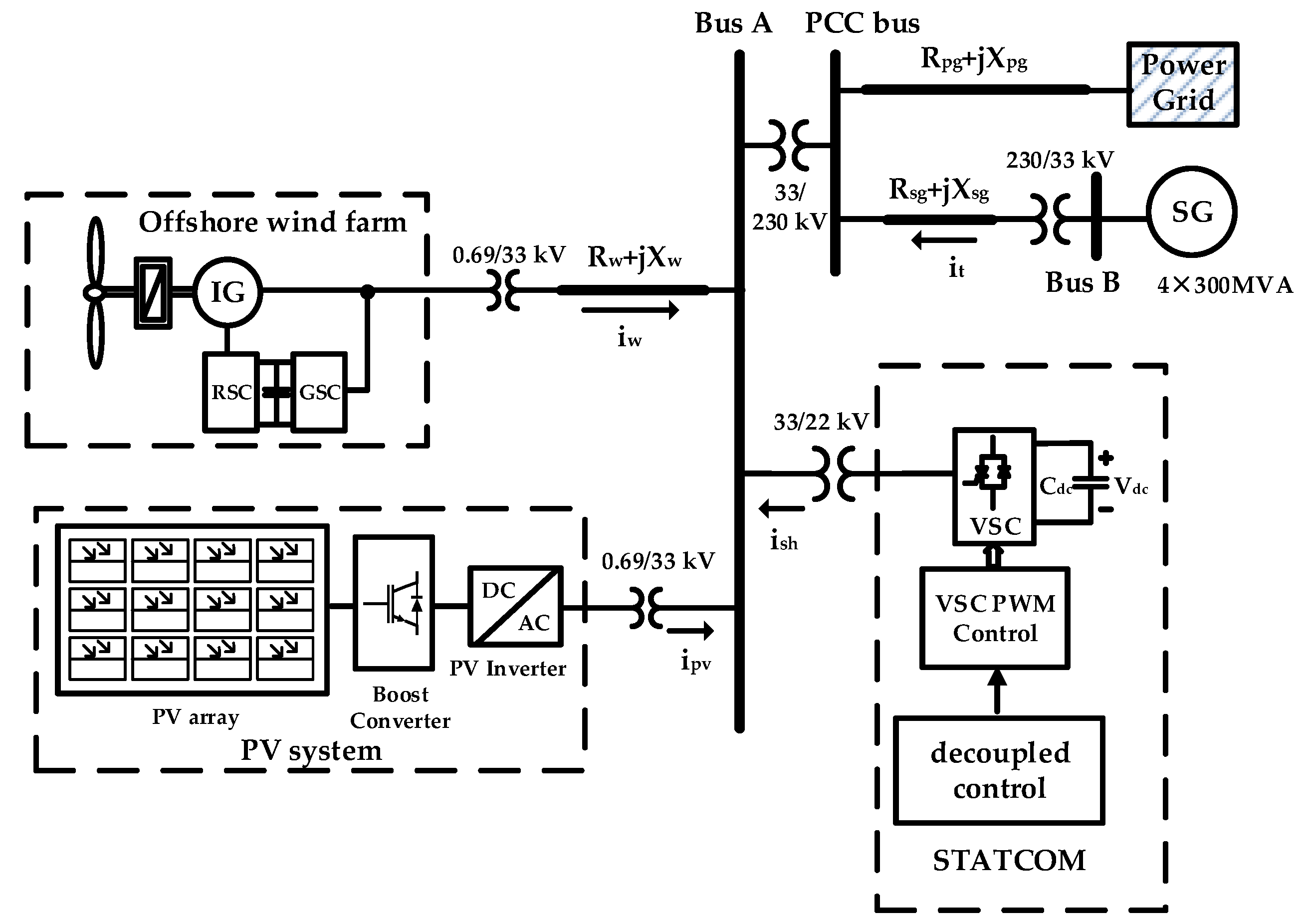
2. Analysis of the Studied System Models
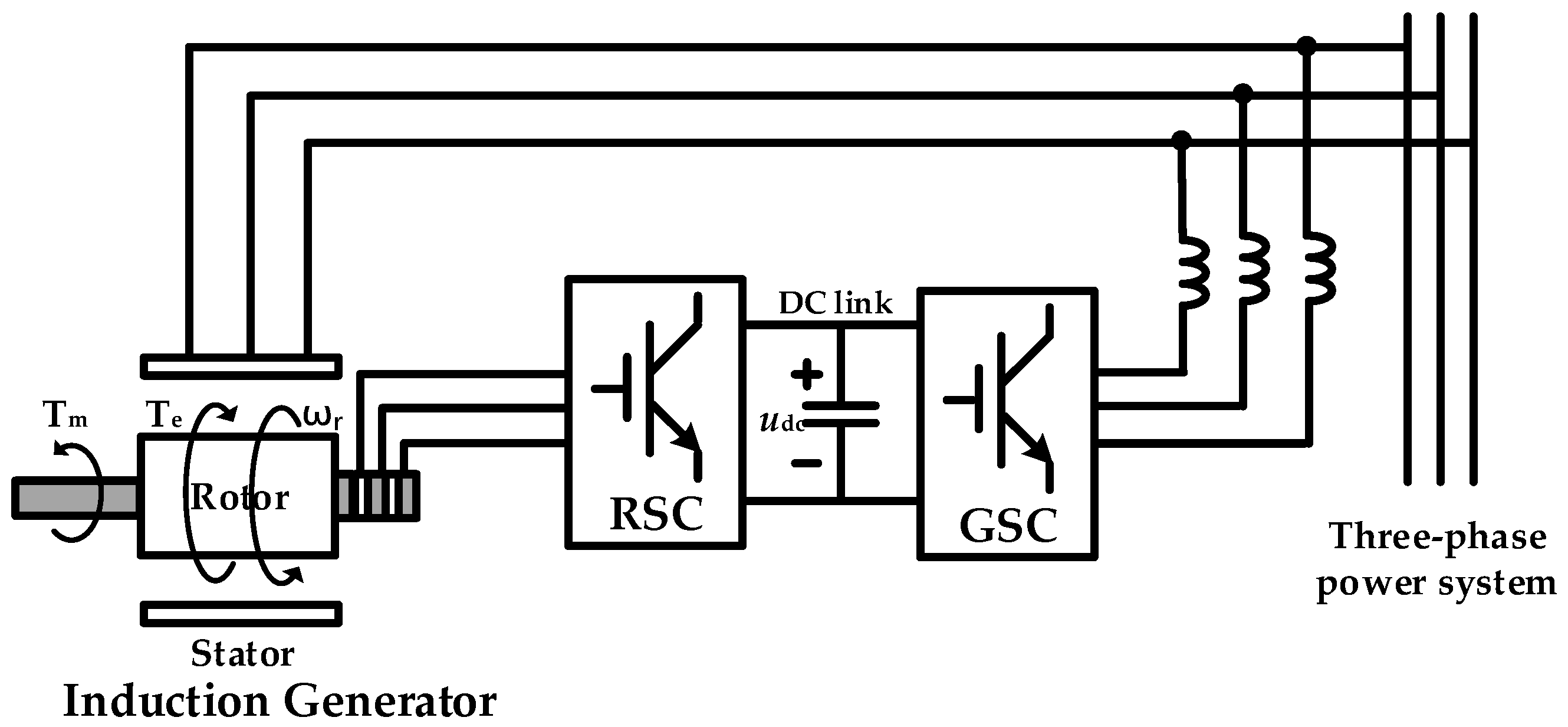
2.1. DFIG Mathematical Model
2.2. Mathematical Model of PV System
2.3. STATCOM Mathematical Model
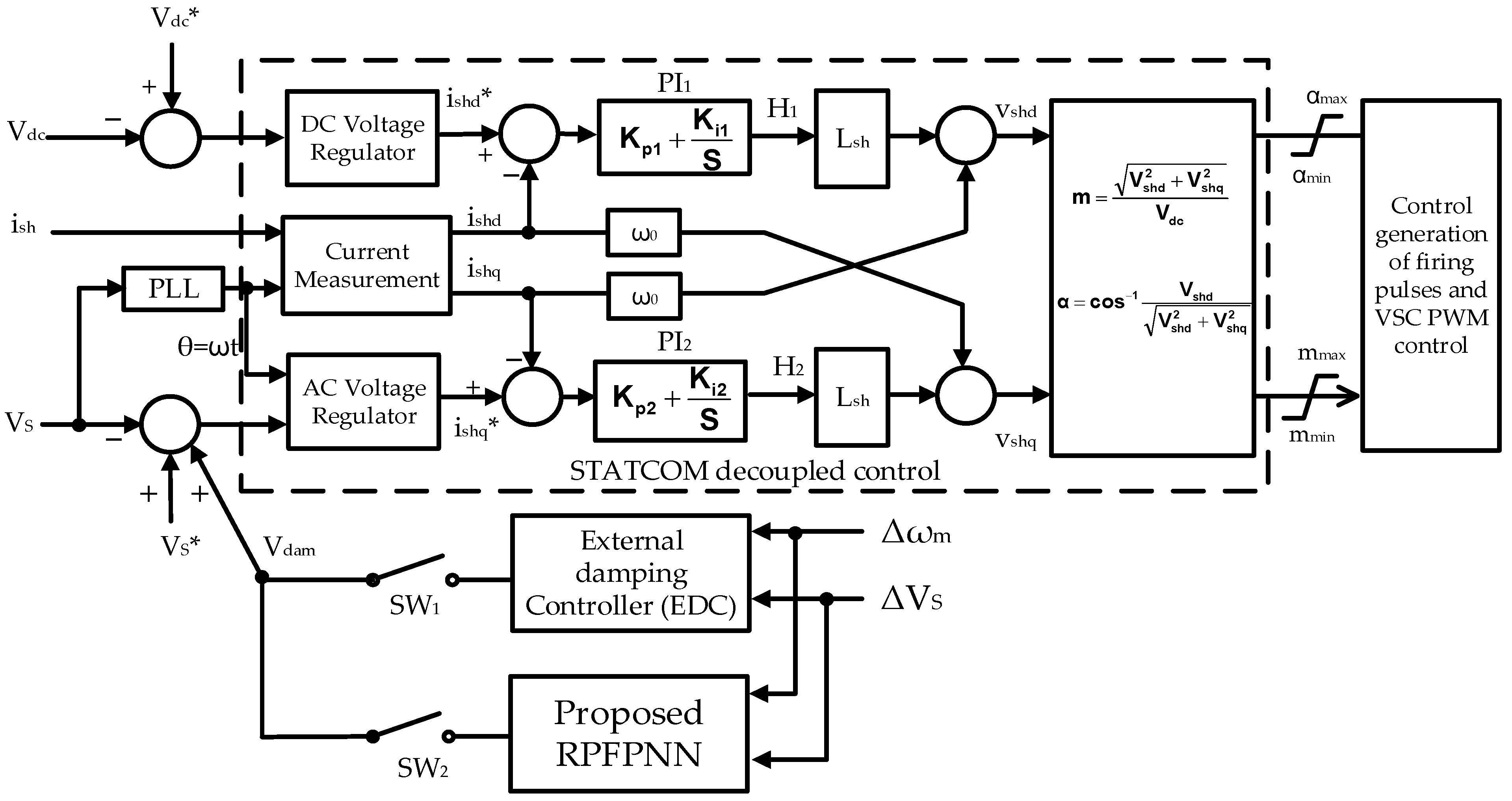
3. Design of the STATCOM Damping Controller
3.1. STATCOM Decoupled Control
3.2. The External Damping Controller of STATCOM
4. Recurrent Petri Fuzzy Probabilistic Neural Network
4.1. Feedforward Process
4.2. Feedback Process
5. Time-Domain Simulations and Discussion
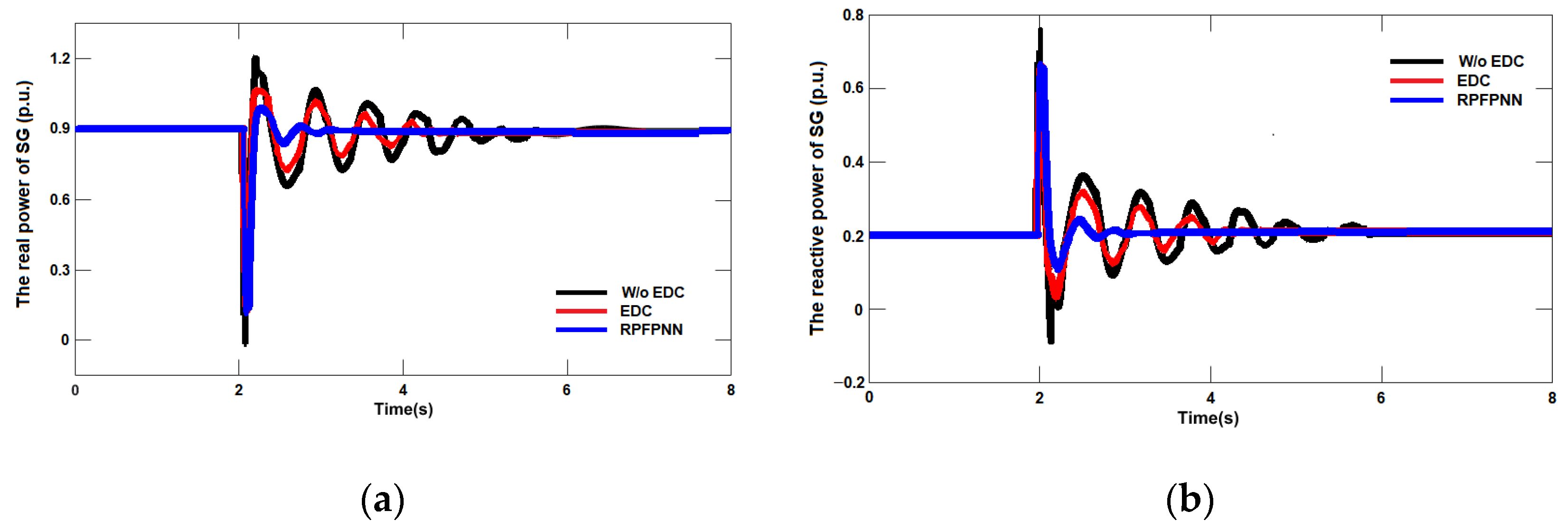
5.1. Case 1: The Transient Response to a Three-Phase Short Circuit Fault
5.2. Case 2: The Fault Ride-Through Performance
6. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| electromagnetic torque | |
| stator/rotor voltage of the d-q coordinate axis | |
| stator/rotor current of the d-q coordinate axis | |
| DFIG synchronous rotation angular frequency | |
| stator/rotor resistors | |
| stator/rotor fluxes of the d-q coordinate axis. | |
| self inductance of stator and rotor winding | |
| mutual inductance between stators/rotors | |
| pole pairs | |
| solar cell internal equivalent current source | |
| reverse saturation current of solar cells without sunlight | |
| , | STATCOM’s output voltage of the d-q coordinate axis |
| bus voltage of the d-q coordinate axis | |
| STATCOM compensating currents of the d-q coordinate axis | |
| n | ideality factor of solar materials = 2.29785 |
| K | Boltzmann’s constant = 1.38 × 10−23 J/k |
| Npll | number of parallel diodes |
| Nse | number of series diodes |
| Kp1, Kp2 | proportional gain of PI1 and PI2 |
| Ki1, Ki2 | integral gain of PI1 and PI2 |
| DFIG electrical angular frequency in the d-q coordinate system | |
| synchronous rotation angular frequency in the d-q coordinate system | |
| ΔωSG | synchronous generator speed variation |
| ΔVS | bus voltage variation |
| K1, K2 | lead-lag controller compensation gains |
| Tm | lead-lag controller sampling period |
| Td1, Td2 | time constant of the washout filter |
| Rw, Xw | transmission line equivalent resistance/inductance from the LSOWF to bus A |
| Rpg, Xpg | transmission line equivalent resistance/inductance from the PCC bus to power grid |
| layer 1 input/output of the RPFPNN | |
| layer 2 output of the RPFPNN | |
| , | layer 3 input/output of the RPFPNN |
| layer 4 output of the RPFPNN | |
| layer 5 output of the RPFPNN | |
| layer 6 output of the RPFPNN | |
| aU, bU | layer 2 weights of the RPFPNN |
| feedback layer weights of the RPFPNN | |
| layer 6 weights of the RPFPNN | |
| , , | adjusting value of, , , and |
| , , , | learning rate of the , , , and |
| Rsg, Xsg | transmission line equivalent resistance/inductance from the PCC bus to the SG |
| error term of the output layer | |
| λ1–λ12 | complex eigenvalues |
| error term of the rule layer | |
| error term of the Gaussian function layer | |
| LM | magnetizing inductance |
| Ron | fault resistance |
| Rg | ground resistance |
| Vgrid | power grid side voltage |
| Z% | transformer impedance percentage |
| RT, XT | transformer resistance/inductance |
| ST | transformer rated apparent power |
| VTH | phase-to-phase nominal voltage for high voltage winding |
| VTL | phase-to-phase nominal voltage for low voltage winding |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| STATCOM |
|---|
| Vdc = 800 V; Cdc = 2200 μF; Lsh = 3 mH; resistance: Rs_snubber = 0.01 Ω; Cs_snubbe = inf; Ron = 1 mΩ; Kp_regulator = 180, Ki_regulator = 320, Kd_regulator = 1; PI1: Kp1 = 50, Ki1 = 50; PI2: Kp2 = 1.5, Ki2 = 80 |
| PV system |
| Nse = 10; Npll = 90; Voc = 85.2 V; Isc = 6.1 A; K_Voc = −0.209%/°C; K_Isc = 0.031606%/°C; Iph = 6.0978 A; Rsh = 418.6813 Ω; Rs = 0.5421 Ω; ID = 3 × 10−10 A |
| DFIG |
| PF = 0.98, f = 60 Hz, Udc = 1200 V; Rs = 0.0071 pu; Ls = 0.172 pu; Rr = 0.0045 pu; Lr = 0.151 pu; Lms = 0.14 pu; Lmr = 0.145 pu; np = 3; LM = 2.9 pu; βmax= 45°; βmax_change = 2°; Ffriction = 0.01 pu; Kp,Grid_voltage = 1.25, Ki,Grid_voltage = 300; Xs_droop = 0.02 pu; Kp_GSC = 1, Ki_GSC = 100; Kp_RSC = 0.3, Ki_RSC = 8 |
References
- Shamshirband, S.; Rabczuk, T.; Chau, K.W. A Survey of Deep Learning Techniques: Application in Wind and Solar Energy Resources. IEEE Access 2019, 7, 164650–164666. [Google Scholar] [CrossRef]
- Lu, K.H.; Chen, H.C.; Su, Y.; Xu, Q. Design of an Intelligent Damping Controller of STATCOM with HVDC for Large Offshore Wind Farm. J. Mar. Sci. Technol. 2018, 26, 228–239. [Google Scholar]
- Lu, K.-H.; Hong, C.-M.; Han, Z.; Yu, L. New Intelligent Control Strategy Hybrid Grey-RCMAC Algorithm for Ocean Wave Power Generation Systems. Energies 2020, 13, 241. [Google Scholar] [CrossRef]
- Qi, Y.; Peng, H.; Yang, L.; Yang, G. Simultaneous Optimisation of Cable Connection Schemes and Capacity for Offshore Wind Farms via a Modified Bat Algorithm. Appl. Sci. 2019, 9, 265. [Google Scholar] [CrossRef]
- Konde, A.L.; Kusaf, M.; Dagbasi, M. An effective design method for grid-connected solar PV power plants for power supply reliability. Energy Sustain. Dev. 2022, 70, 301–313. [Google Scholar] [CrossRef]
- Medina, Q.Á.; Gil, G.W.; Montoya, O.D.; Molina, C.A.; Hernández, J.C. Control of Photovoltaic Plants Interconnected via VSC to Improve Power Oscillations in a Power System. Electronics 2022, 11, 1744. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Le, H.D.; Takano, H.; Nguyen, D.T. Cooperative LVRT control for protecting PMSG-based WTGs using battery energy storage system. Energy Rep. 2023, 9, 590–598. [Google Scholar] [CrossRef]
- Zhou, N.; Ma, H.; Chen, J.C.; Fang, Q.; Jiang, Z.; Li, C. Equivalent Modeling of LVRT Characteristics for Centralized DFIG Wind Farms Based on PSO and DBSCAN. Energies 2023, 16, 2551. [Google Scholar] [CrossRef]
- Ahmet, S.P.; Beste, B.; Kemalettin, E. Genetically Optimized Pitch Angle Controller of a Wind Turbine with Fuzzy Logic Design Approach. Energies 2022, 15, 6705. [Google Scholar]
- Wu, X.; Jiang, S.; Lai, C.S.; Zhao, Z.; Lai, L.L. Short-Term Wind Power Prediction Based on Data Decomposition and Combined Deep Neural Network. Energies 2022, 15, 6734. [Google Scholar] [CrossRef]
- California Rule 21; California Public Utilities Commission (CPUC): San Francisco, CA, USA, 2016.
- VDE. VDE-AR-N 4105:2011-08 Power Generation Systems Connected to the Low-Voltage Distribution Network; VDE Verband der Elektrotechnik: Offenbach am Main, Germany, 2011. [Google Scholar]
- Sudip, B.; Bhim, S. Wind-Driven DFIG–Battery–PV-Based System with Advance DSOSF-FLL Control. IEEE Trans. Ind. Appl. 2022, 58, 4370–4380. [Google Scholar]
- Li, W.; Lin, C.Y.; Wu, H.Y. Stability Analysis of a Microgrid System with a Hybrid Offshore Wind and Ocean Energy Farm Fed to a Power Grid Through an HVDC Link. IEEE Trans. Ind. Appl. 2018, 54, 2012–2022. [Google Scholar]
- Amr, M.I.; Sanaa, A.G.; Noha, H.E.-A.; Soliman, M.S. STATCOM Controller Design and Experimental Investigation for Wind Generation System. IEEE Access 2019, 7, 150453–150461. [Google Scholar]
- Li, G.; Chen, Y.; Luo, A.; Liu, X. Wideband Harmonic Voltage Feedforward Control Strategy of STATCOM for Mitigating Subsynchronous Resonance in Wind Farm Connected to Weak Grid and LCC HVDC. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 4546–4557. [Google Scholar] [CrossRef]
- Boghdady, T.A.; Mohamed, Y.A. Reactive power compensation using STATCOM in a PV grid connected system with a modified MPPT method. Ain Shams Eng. J. 2023, 14, 102060. [Google Scholar] [CrossRef]
- Lu, K.H.; Hong, C.M.; Cheng, F.S. Enhanced Dynamic Performance in Hybrid Power System Using a Designed ALTS-PFPNN Controller. Energies 2022, 15, 8263. [Google Scholar] [CrossRef]
- Toqeer, A.; Asad, W.; Rajvikram, M.E.; Junaid, I.; Manoharan, P.; Umashankar, S. Analysis of Fractional Order Sliding Mode Control in a D-STATCOM Integrated Power Distribution System. IEEE Access 2021, 9, 70337–70352. [Google Scholar]
- Moursi, M.E.; Goweily, K.; Kirtley, J.; Abdel-Rahman, M. Application of series voltage boosting schemes for enhanced fault ride through performance of fixed speed wind turbines. IEEE Trans. Power Del. 2014, 29, 61–71. [Google Scholar] [CrossRef]
- Saeed, R.M.; Jalalat, S.M.; Tousi, B.; Galvani, S.; Talavat, V. A probabilistic approach for optimal operation of wind-integrated power systems including UPFC. IET Renew. Power Gener. 2022, 17, 706–724. [Google Scholar]
- Joshi, M.; Sharma, G.; Bokoro, P.N.; Krishnan, N. A Fuzzy-PSO-PID with UPFC-RFB Solution for an LFC of an Interlinked Hydro Power System. Energies 2022, 15, 4847. [Google Scholar] [CrossRef]
- Ikeli, N.H.; Ashigwuike, C.E.; Alabi, I.I. Investigation of the impact of PSO, ABC, BFO and Cuckoo search optimization techniques on UPFC device for sustainable voltage stability margin improvement. J. Electr. Syst. Inf. Technol. 2023, 10, 217. [Google Scholar] [CrossRef]
- Saxena, N.K.; Gupta, A.R.; Mekhilef, S.; Gao, W.D.; Kumar, A.; Gupta, V.; Netto, R.S.; Kanungo, A. Firefly Algorithm based LCL filtered grid-tied STATCOM design for reactive power compensation in SCIG based Micro-grid. Energy Rep. 2022, 8, 723–740. [Google Scholar] [CrossRef]
- Saad, D.; Naeem, A.; Haroon, F.; Ali, R.K.; Awais, A.M. NeuroFuzzy Wavelet Based Auxiliary Damping Controls for STATCOM. IEEE Access 2020, 8, 200367–200382. [Google Scholar]
- Tan, K.H. Squirrel-cage induction generator system using wavelet Petri fuzzy neural network control for wind power applications. IEEE Trans. Power Electron. 2016, 31, 5242–5254. [Google Scholar] [CrossRef]
- Kaur, K.; Rana, R.; Kumar, N.; Singh, M.; Mishra, S. A colored petri net based frequency support scheme using fleet of electric vehicles in smart grid environment. IEEE Trans. Power Syst. 2016, 31, 4638–4649. [Google Scholar] [CrossRef]
- Wang, P.L.; Ma, L.; Goverde, R.M.P.; Wang, Q.Y. Rescheduling trains using petri nets and heuristic search. IEEE Trans. Intell. Transp. Syst. 2016, 17, 726–735. [Google Scholar] [CrossRef]
- Espi, J.M.; Castello, J. New Fast MPPT Method Based on a Power Slope Detector for Single Phase PV Inverters. Energies 2019, 12, 4379. [Google Scholar] [CrossRef]
- Sangwongwanich, A.; Blaabjerg, F. Mitigation of Interharmonics in PV Systems with Maximum Power Point Tracking Modification. IEEE Trans. Power Electron. 2019, 34, 8279–8282. [Google Scholar] [CrossRef]
- Wang, L.; Truong, D.N. Dynamic Stability Improvement of Four Parallel-Operated PMSG-Based Offshore Wind Turbine Generators Fed to a Power System Using a STATCOM. IEEE Trans. Power Del. 2013, 28, 111–119. [Google Scholar] [CrossRef]
- Uddin, W.; Zeb, N.; Zeb, K.; Ishfaq, M.; Khan, I.; Ul Islam, S.; Tanoli, A.; Haider, A.; Kim, H.-J.; Park, G.-S. A Neural Network-Based Model Reference Control Architecture for Oscillation Damping in Interconnected Power System. Energies 2019, 12, 3653. [Google Scholar] [CrossRef]
- Chen, S.G.; Lin, F.J.; Liang, C.H.; Liao, C.H. Intelligent Maximum Power Factor Searching Control Using Recurrent Chebyshev Fuzzy Neural Network Current Angle Controller for SynRM Drive System. IEEE Trans. Power Electron. 2021, 36, 3496–3511. [Google Scholar] [CrossRef]
- Taiwan Power Company. Available online: https://www.taipower.com.tw/tc/index.aspx (accessed on 1 September 2023).






| Eigenvalues | STATCOM without EDC | STATCOM with EDC |
|---|---|---|
| λ1 | −43.27 ± j4393.62 | −43.27 ± j4393.62 |
| λ2 | −106.73 ± j414.67 | −106.70 ± j414.67 |
| λ3 | −76.36 ± j92.83 | −70.63 ± j136.09 |
| λ4 | −53.34 ± j2.17 | −53.54 ± j2.40 |
| λ5 | −0.14, −40.60 | −0.209, −40.64 |
| λ6 | −9.96 ± j28.42 | −9.92 ± j28.35 |
| λ7 | −0.286 ± j10.22 [0.37] | −1.88 ± j12.32 [0.51] |
| λ8 | −10.89 ± j2.68 | −10.83 ± j2.71 |
| λ9 | −6.17, −3.20 | −6.08, −2.44 |
| λ10 | −0.78 ± j1.63 [0.51] | −0.82 ± j1.43 [0.88] |
| λ11 | −1.01, −0.09 | −1.01, −0.09 |
| λ12 | −100.12 | −100.12 |
| System |
|---|
| Vbase = 230 kV; Sbsae = 10 MVA; ST = 8 MVA; VTH = 230 KV; VTL = 33 KV; Vgrid = 1 pu; Z% = 2.5; RT= 0.00083 pu; XT = 0.025 pu; Rpg = 0.042 pu; Xpg = 0.85 pu; Rsg = 0.021 pu; Xsg = 0.425 pu; Rw = 0.0072 pu; Xw = 0.172 pu; Ron = 1 mΩ; Rg = 1 mΩ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, K.-H.; Rao, Q. Enhancing the Dynamic Stability of Integrated Offshore Wind Farms and Photovoltaic Farms Using STATCOM with Intelligent Damping Controllers. Sustainability 2023, 15, 13962. https://doi.org/10.3390/su151813962
Lu K-H, Rao Q. Enhancing the Dynamic Stability of Integrated Offshore Wind Farms and Photovoltaic Farms Using STATCOM with Intelligent Damping Controllers. Sustainability. 2023; 15(18):13962. https://doi.org/10.3390/su151813962
Chicago/Turabian StyleLu, Kai-Hung, and Qianlin Rao. 2023. "Enhancing the Dynamic Stability of Integrated Offshore Wind Farms and Photovoltaic Farms Using STATCOM with Intelligent Damping Controllers" Sustainability 15, no. 18: 13962. https://doi.org/10.3390/su151813962