
Connected Intelligent Transportation System Model to Minimize Societal Cost of Travel in Urban Networks


Abstract
:1. Introduction
2. Methodology and Modelling Approach
2.1. Modelling the Societal Cost of Travel
2.1.1. Cost of Fuel Consumption
2.1.2. Cost of Pollutant Emissions
2.1.3. Cost of Traffic Accidents
2.1.4. Cost of Travel Time
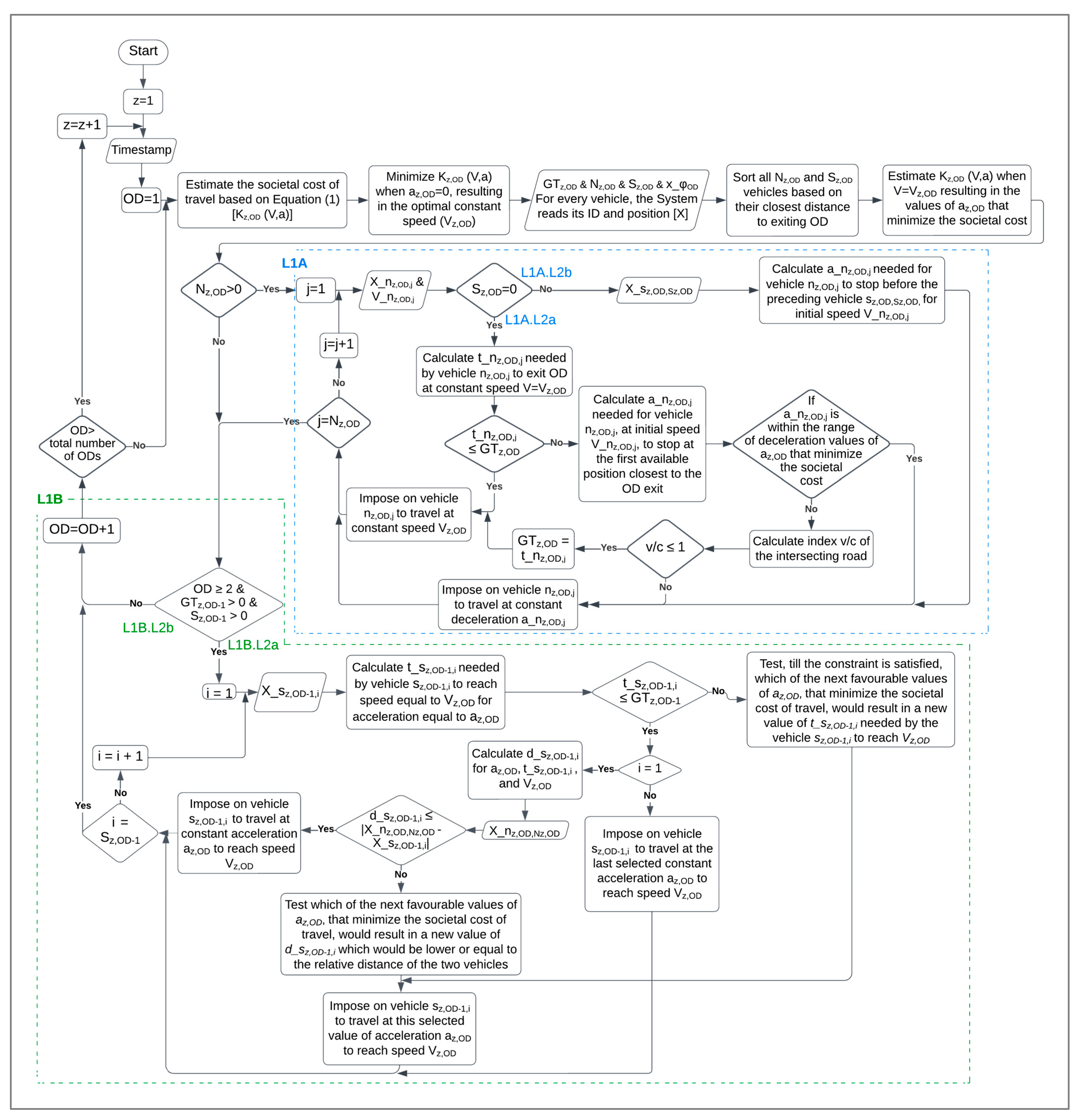
2.2. Innovative Urban Connected Intelligent Transport System
- The first level of Case Classification (L1) refers to the existence of vehicles moving on the OD, Nz,OD.
- -
- L1A: If vehicles Nz,OD are moving on the OD
- The second level of Case Classification (L2) of L1A refers to the existence of vehicles idling at the end of the OD owing to red traffic light, Sz,OD.
- —
- L1A.L2a: If there are no vehicles Sz,OD idling at the end of the OD
- —
- L1A.L2b: If there are vehicles Sz,OD idling at the end of the OD
- -
- L1B: If there are no vehicles Nz,OD moving on the OD or if all nz,OD,j vehicles have been processed in the previous iterative loop
- The second level of Case Classification (L2) of L1B refers to the existence of remaining green time (GTz,OD-1) of the traffic light at the end of OD-1.
- —
- L1B.L2a: If there is remaining green time GTz,OD-1 of the traffic light at the end of OD-1
- —
- L1B.L2b: If there is no remaining green time GTz,OD-1 of the traffic light at the end of OD-1
3. Study Area and Data
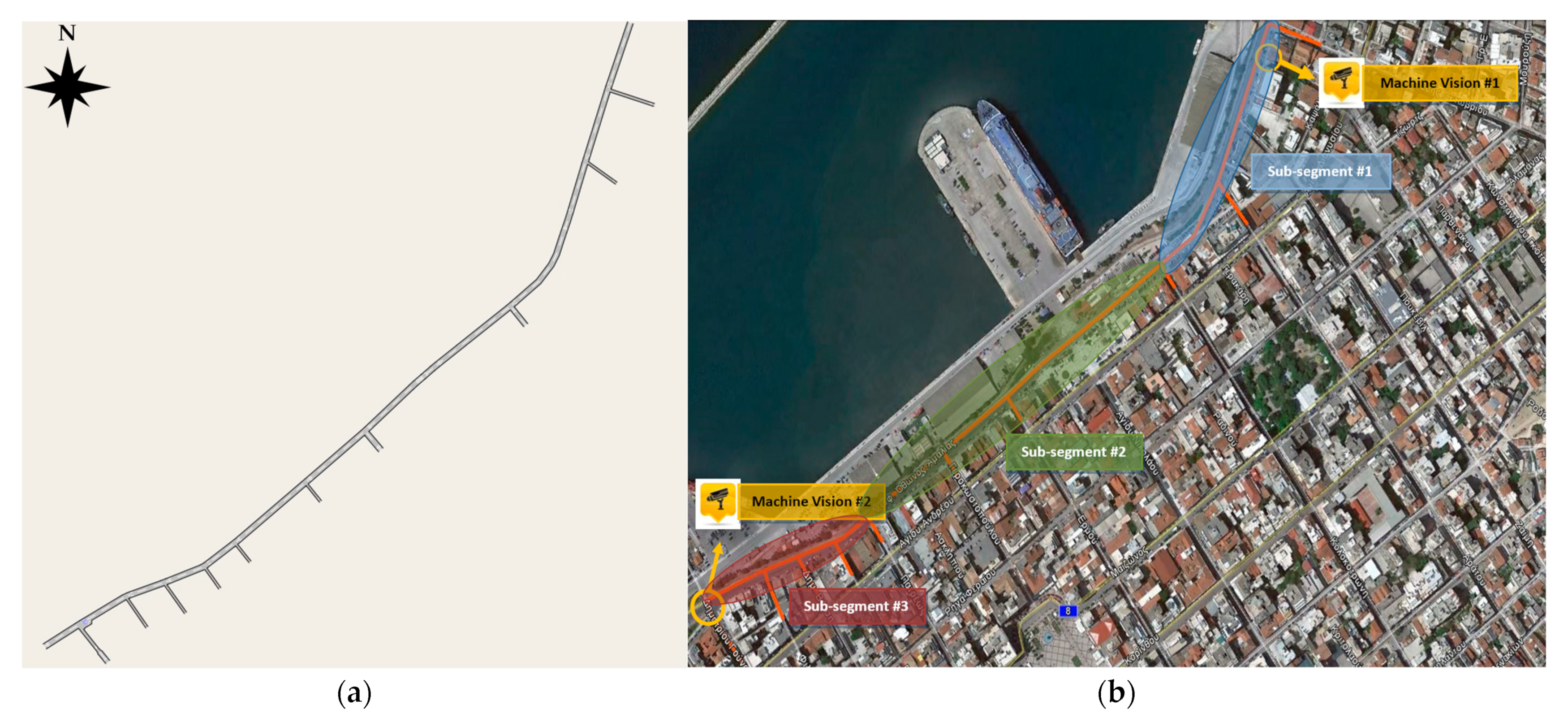
3.1. Study Area
3.2. Data
- Field data manually recorded: For developing a representative traffic simulation model, traffic flow and turning percentages data from the study area had to be collected. In particular, we measured the traffic flow entering the under study section of Othonos-Amalias avenue, the traffic flow entering Othonos-Amalias avenue from the intersecting roads and the turning flow exiting Othonos-Amalias avenue towards the intersecting roads. These data were recorded separately for the category of passenger vehicles and heavy vehicles, trucks and buses. The data were processed to obtain the exiting turning percentages. These data are shown in Tables S1 and S2 of Supplementary Materials.
- Traffic data from Machine Vision systems: Traffic volume, traffic flow and turning percentages were also collected by the two Machine Vision systems which monitor the entry and exit of the study area. The Machine Vision systems are parameterized to record traffic data per pre-defined vehicle classes by vehicle length. To adapt the recorded data into the vehicle categories of this study (i.e., passenger vehicles and heavy vehicles, trucks and buses) and insert them in the traffic simulation model, the data were processed as shown in Tables S3–S7 of Supplementary Materials.
- Data related to traffic lights at the intersections: It was necessary to record the cycle of each traffic light at the signalized intersections, including the duration of the individual traffic light phases. This information is needed for the development of the traffic simulation model. Location and operation data of each traffic light are shown in Table S8 of Supplementary Materials.
- Data related to public transport: For the traffic simulation of the study area, it was needed to record information on the routes of the city buses, and data on the average duration of the bus stops. The frequency of the routes (Table S9 of Supplementary Materials) was obtained from the official website of the urban transport authority of the city of Patras. The average stop duration was defined as 18 s based on field measurements of 45 buses that stopped at the bus stop located in the road segment under study.
- Traffic accidents: On the number of traffic accidents per category studied (all injury accidents (aia) including any injury regardless of severity and property-only damage accidents (pdo)), documentation from Patras Traffic Police was used to collect accident records as shown in Table S10 of Supplementary Materials.
- Open Street Maps were used to insert the study area in the traffic simulation software.
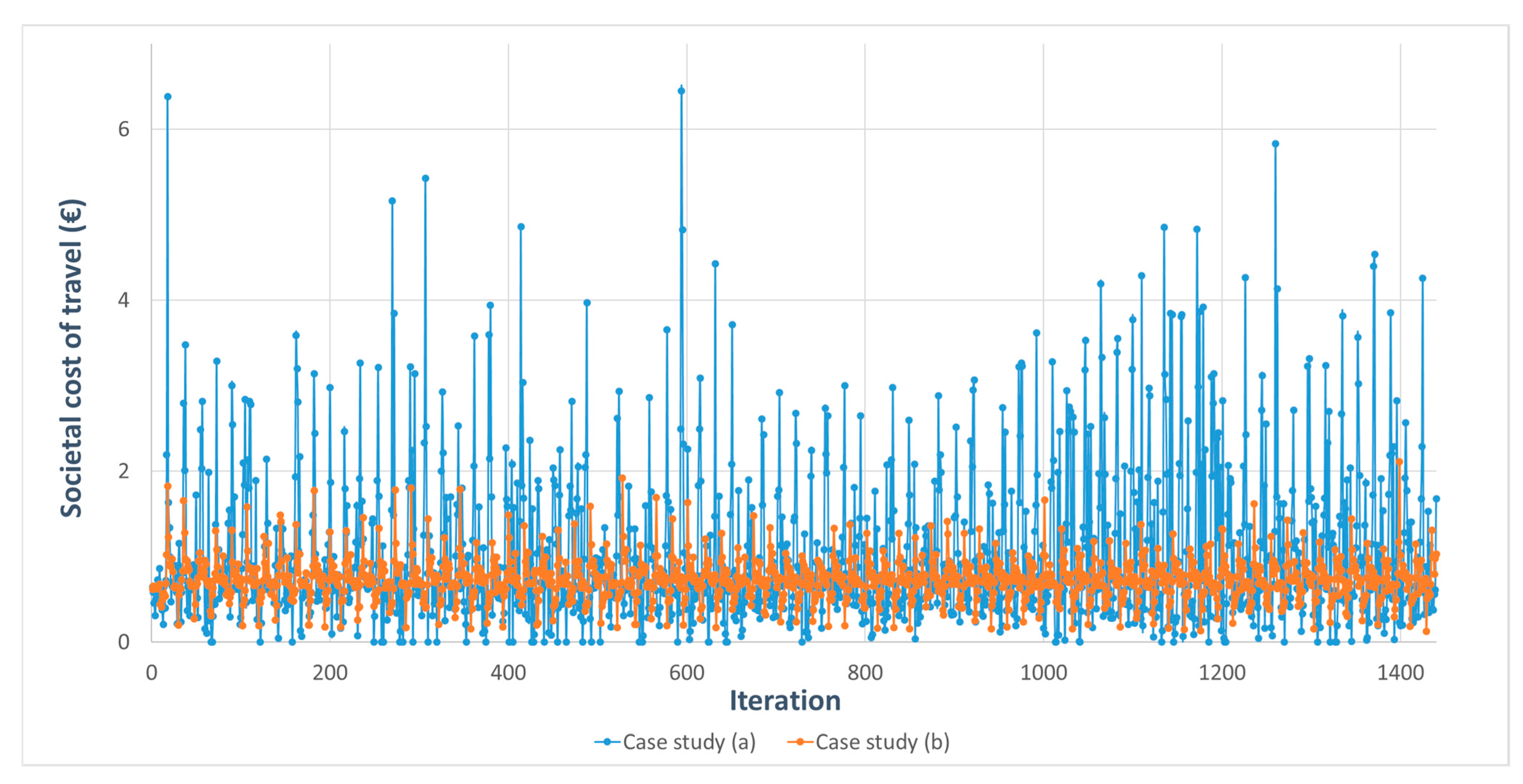
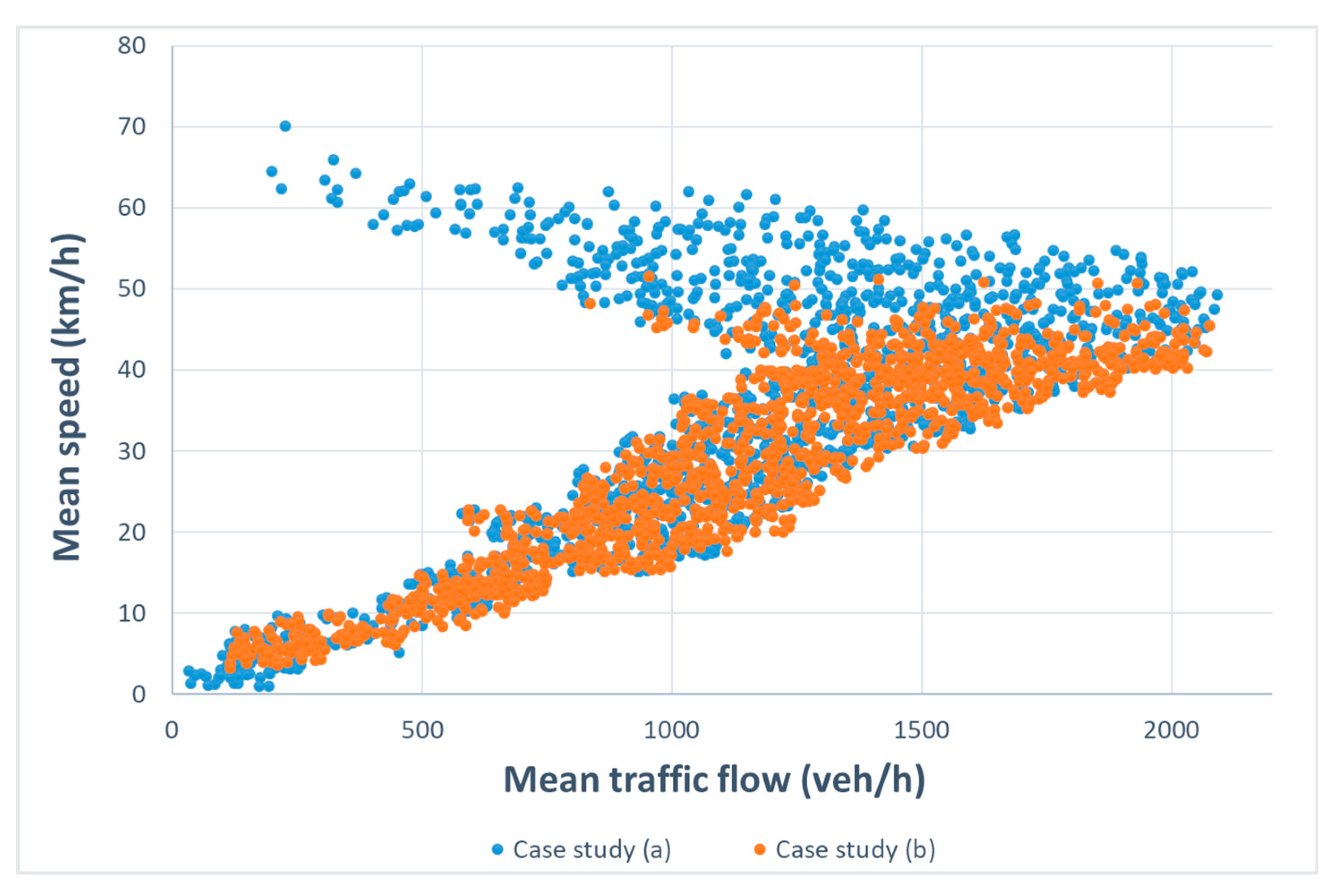
4. Results
5. Discussion
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Peñabaena-Niebles, R.; Cantillo, V.; Moura, J.L. The positive impacts of designing transition between traffic signal plans considering social cost. Transp. Policy 2019, 87, 67–76. [Google Scholar] [CrossRef]
- Mavrin, V.; Magdin, K.; Shepelev, V.; Danilov, I. Reduction of environmental impact from road transport using analysis and simulation methods. Transp. Res. Procedia 2020, 50, 451–457. [Google Scholar] [CrossRef]
- Bento, L.C.; Parafita, R.; Rakha, H.A.; Nunes, U.J. A study of the environmental impacts of intelligent automated vehicle control at intersections via V2V and V2I communications. J. Intell. Transp. Syst. 2018, 23, 41–59. [Google Scholar] [CrossRef]
- Milakis, D.; van Arem, B.; van Wee, B. Policy and society related implications of automated driving: A review of literature and directions for future research. J. Intell. Transp. Syst. 2017, 21, 324–348. [Google Scholar] [CrossRef]
- Elvik, R. Optimal Speed Limits: Limits of Optimality Models. Transp. Res. Rec. J. Transp. Res. Board 2002, 1818, 32–38. [Google Scholar] [CrossRef]
- Van Benthem, A. What is the optimal speed limit on freeways? J. Public Econ. 2015, 124, 44–62. [Google Scholar] [CrossRef]
- Marousi, K.P.; Koukounaris, A.I.; Stephanedes, Y.J. Methodology for societal travel cost estimation in urban road networks. Transp. Res. Procedia 2019, 41, 405–409. [Google Scholar] [CrossRef]
- Bai, X.; Chen, H.; Oliver, B.G. The health effects of traffic-related air pollution: A review focused the health effects of going green. Chemosphere 2021, 289, 133082. [Google Scholar] [CrossRef]
- Yannis, G. Road Safety in Greece—A decade of improvements. In Proceedings of the 2nd Meeting of Western Balkans Road Safety Observatory—Role of the Traffic Safety Agency and Importance of Reliable Data in Policy Making, Skopje, Republic of Macedonia, 6 December 2021. [Google Scholar]
- Elvik, R.; Nævestad, T.-O. Does empirical evidence support the effectiveness of the Safe System approach to road safety management? Accid. Anal. Prev. 2023, 191, 107227. [Google Scholar] [CrossRef]
- Fuel Prices in Greece. Available online: www.fuelprices.gr/deltia_d.view (accessed on 2 November 2022).
- Akcelik, R. On the elemental model of fuel consumption—Prediction of changes in fuel consumption two examples. In Proceedings of the Australian Road Research Board—Seminar on Fuel Consumption Modelling for Urban Traffic Management, Melbourne, Australia, 9 October 1981. [Google Scholar]
- Akcelik, R.; Richardson, A.J.; Watson, H.C. Relation between two fuel consumption models. In Proceedings of the 2nd Joint SAE/ARRB Conference on Traffic, Energy and Emissions, Melbourne, Australia, 19–21 May 1982. [Google Scholar]
- Akcelik, R.; Besley, M. Operating cost, fuel consumption, and emission models in aaSIDRA and aaMOTION. In Proceedings of the 25th Conference of Australian Institute of Transport research, Adelaide, Australia, 3–5 December 2003. [Google Scholar]
- Pal, M.; Sarkar, D. Delay, fuel loss and noise pollution during idling of vehicles Nat signalized intersection in Agartala city, India. Civ. Environ. Res. 2012, 2, 8–14. [Google Scholar]
- Stoica, R.-M.; Rădulescu, M.-E.; Dinu, I.; Ene, G.; Neagu, D.; Copae, I. The Comparative Study of Engine Vehicles Functioning With Petrol and Liquefied Petroleum Gas. In Proceedings of the European Automotive Congress EAEC-ESFA 2015, 1st ed.; Andreescu, C., Clenci, A., Eds.; Springer: Cham, Switzerland, 2016; Volume 1, pp. 285–295. [Google Scholar] [CrossRef]
- Rahman, S.A.; Masjuki, H.; Kalam, M.; Abedin, M.; Sanjid, A.; Sajjad, H. Impact of idling on fuel consumption and exhaust emissions and available idle-reduction technologies for diesel vehicles—A review. Energy Convers. Manag. 2013, 74, 171–182. [Google Scholar] [CrossRef]
- Brodrick, C.-J.; Dwyer, H.A.; Farshchi, M.; Harris, D.B.; King, F.G., Jr. Effects of Engine Speed and Accessory Load on Idling Emissions from Heavy-Duty Diesel Truck Engines. J. Air Waste Manag. Assoc. 2002, 52, 1026–1031. [Google Scholar] [CrossRef] [PubMed]
- Frey, H.C.; Kuo, P.-Y. Real-World Energy Use and Emission Rates for Idling Long-Haul Trucks and Selected Idle Reduction Technologies. J. Air Waste Manag. Assoc. 2009, 59, 857–864. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.S.; Clark, N.N.; Gautam, M.; Wayne, W.S.; Thompson, G.J.; Lyons, D.W. Idle Emissions from Medium Heavy-Duty Diesel and Gasoline Trucks. J. Air Waste Manag. Assoc. 2009, 59, 354–359. [Google Scholar] [CrossRef] [PubMed]
- Victoria Transportation Policy Institute Transportation Cost and Benefit Analysis II–Air Pollution Costs 2020. Available online: https://www.vtpi.org/tca/tca0510.pdf (accessed on 11 August 2023).
- Panis, L.I.; Broekx, S.; Liu, R. Modelling instantaneous traffic emission and the influence of traffic speed limits. Sci. Total. Environ. 2006, 371, 270–285. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, G. Traffic Safety Dimensions and the Power Model to Describe the Effect of Speed on Safety. Ph.D. Thesis, Lund Institute of Technology and Society, Lund, Sweden, 2004. [Google Scholar]
- Elvik, R.; Ulstein, H.; Wifstad, K.; Syrstad, R.S.; Seeberg, A.R.; Gulbrandsen, M.U.; Welde, M. An Empirical Bayes before-after evaluation of road safety effects of a new motorway in Norway. Accid. Anal. Prev. 2017, 108, 285–296. [Google Scholar] [CrossRef] [PubMed]
- Elvik, R. A re-parameterisation of the Power Model of the relationship between the speed of traffic and the number of accidents and accident victims. Accid. Anal. Prev. 2013, 50, 854–860. [Google Scholar] [CrossRef] [PubMed]
- Panagopoulou, M.; Chassiakos, A. An Optimization Model for Pavement Maintenance Planning and Resource Allocation. In Proceedings of the AASHTO-TRB Maintenance Management, Seatle, WA, USA; 2012. [Google Scholar]
- Gounaris, A. Urban mobility in Athens. In Proceedings of the Future of Transport in Greece and across the World, Thessaloniki, Greece, 3–4 May 2018. [Google Scholar]
- Hosseinlou, M.H.; Kheyrabadi, S.A.; Zolfaghari, A. Determining optimal speed limits in traffic networks. IATSS Res. 2015, 39, 36–41. [Google Scholar] [CrossRef]
- European Environmental Agency. Available online: https://www.eea.europa.eu/publications/co2-emissions-of-new-heavy (accessed on 6 September 2023).
- Frey, H.C.; Rouphail, N.M.; Unal, A.; Colyar, J.D. Emissions Reduction through Better Traffic Management: An Empirical Evaluation Based upon On-Road Measurements, 1st ed.; Joint Environmental Research Program; North Carolina State University: Raleigh, NC, USA, 2001; pp. 1–370. [Google Scholar]
- Tong, H.; Hung, W.; Cheung, C. On-Road Motor Vehicle Emissions and Fuel Consumption in Urban Driving Conditions. J. Air Waste Manag. Assoc. 2000, 50, 543–554. [Google Scholar] [CrossRef]
- Hung, W.-T.; Tong, H.-Y.; Cheung, C.-S. A Modal Approach to Vehicular Emissions and Fuel Consumption Model Development. J. Air Waste Manag. Assoc. 2005, 55, 1431–1440. [Google Scholar] [CrossRef]
- Islam, T.; Tiwana, J.; Bhowmick, A.; Qiu, T.Z. Design of LRT Signal Priority to Improve Arterial Traffic Mobility. J. Transp. Eng. 2016, 142, 04016034. [Google Scholar] [CrossRef]
- National Road Safety Strategic Plan 2021–2030. Available online: https://www.nrso.ntua.gr/nrss2030/wp-content/uploads/2022/06/NationalRoadSafetyStrategicPlan-eng.pdf (accessed on 10 September 2023).
- Iora, P.; Tribioli, L. Effect of Ambient Temperature on Electric Vehicles’ Energy Consumption and Range: Model Definition and Sensitivity Analysis Based on Nissan Leaf Data. World Electr. Veh. J. 2019, 10, 2. [Google Scholar] [CrossRef]
- QUARTET. Assessment of Current Tools for Environment Assessment in QUARTET; DRIVE II Project V2018; QUARTET: Toronto, ON, Canada, 1992. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fuel/Vehicle Type | F1 [L/100 km] | F2 [L/100 km] | Vm [km/h] | Fi [mL/s] | c1 [mL/s] | c1 [mL-s2/m2] | Fd [mL/s] |
|---|---|---|---|---|---|---|---|
| petrol cars | 7.5 | 8.8 | 50 | 0.33 | 0.42 | 0.26 | 0.53 |
| diesel cars | 5.1 | 5.7 | 50 | 0.20 | 0.31 | 0.16 | 0.42 |
| LPG cars | 9.0 | 12.0 | 50 | 0.25 | 0.78 | 0.46 | 0.95 |
| diesel trucks/buses | 27.0 | 42.4 | 40 | 0.60 | 0.74 | 0.49 | 0.90 |
| Fuel/Vehicle Type | E0 | f1 | f2 | f3 | f4 | f5 | f6 |
|---|---|---|---|---|---|---|---|
| petrol car | 0 | 0.553 | 0.161 | −0.00289 | 0.266 | 0.511 | 0.183 |
| diesel car | 0 | 0.324 | 0.086 | 0.00496 | −0.059 | 0.448 | 0.230 |
| LPG car | 0 | 0.600 | 0.219 | −0.00774 | 0.357 | 0.514 | 0.170 |
| diesel truck/bus | 0 | 1.520 | 1.880 | −0.0695 | 4.710 | 5.880 | 2.090 |
| Fuel/Vehicle Type | Acceleration [m/s2] | E0 | f1 | f2 | f3 | f4 | f5 | f6 |
|---|---|---|---|---|---|---|---|---|
| petrol car | α ≥ −0.5 | 0 | 6.19 × 10−4 | 8.00 × 10−5 | −4.03 × 10−6 | −4.13 × 10−4 | 3.80 × 10−4 | 1.77 × 10−4 |
| α < −0.5 | 0 | 2.17 × 10−4 | 0 | 0 | 0 | 0 | 0 | |
| diesel car | α ≥ −0.5 | 0 | 2.41 × 10−3 | −4.11 × 10−4 | 6.73 × 10−5 | −3.07 × 10−3 | 2.14 × 10−3 | 1.50 × 10−3 |
| α < −0.5 | 0 | 1.68 × 10−3 | −6.62 × 10−5 | 9.00 × 10−6 | 2.50 × 10−4 | 2.91 × 10−4 | 1.20 × 10−4 | |
| LPG car | α ≥ −0.5 | 0 | 8.92 × 10−4 | 1.61 × 10−5 | −8.06 × 10−7 | −8.23 × 10−5 | 7.60 × 10−5 | 3.54 × 10−5 |
| α < −0.5 | 0 | 3.43 × 10−4 | 0 | 0 | 0 | 0 | 0 | |
| diesel truck/bus | 0 | 0.0356 | 9.71 × 10−3 | −2.40 × 10−4 | 0.0326 | 0.0133 | 0.0115 | |
| Fuel/Vehicle Type | Acceleration [m/s2] | E0 | f1 | f2 | f3 | f4 | f5 | f6 |
|---|---|---|---|---|---|---|---|---|
| petrol car | α ≥ −0.5 | 0 | 4.47 × 10−3 | 7.32 × 10−7 | −2.87 × 10−8 | −3.41 × 10−6 | 4.94 × 10−6 | 1.66 × 10−6 |
| α < −0.5 | 0 | 2.63 × 10−3 | 0 | 0 | 0 | 0 | 0 | |
| diesel car | α ≥ −0.5 | 0 | 9.22 × 10−5 | 9.09 × 10−6 | −2.29 × 10−7 | −2.20 × 10−5 | 1.69 × 10−5 | 3.75 × 10−6 |
| α < −0.5 | 0 | 5.25 × 10−5 | 7.22 × 10−6 | −1.87 × 10−7 | 0 | −1.02 × 10−5 | −4.22 × 10−6 | |
| LPG car | α ≥ −0.5 | 0 | 0.0144 | 1.74 × 10−7 | −6.82 × 10−9 | −8.11 × 10−7 | 1.18 × 10−6 | 3.96 × 10−7 |
| α < −0.5 | 0 | 8.42 × 10−3 | 0 | 0 | 0 | 0 | 0 | |
| diesel truck/bus | 0 | 1.04 × 10−3 | 4.87 × 10−4 | −1.49 × 10−5 | 1.27 × 10−3 | 2.10 × 10−4 | 1.00 × 10−4 | |
| Fuel/Vehicle Type | E0 | f1 | f2 | f3 | f4 | f5 | f6 |
|---|---|---|---|---|---|---|---|
| petrol car | 0 | 0 | 1.57 × 10−5 | −9.21 × 10−7 | 0 | 3.75 × 10−5 | 1.89 × 10−5 |
| diesel car | 0 | 0 | 3.13 × 10−4 | −1.84 × 10−5 | 0 | 7.50 × 10−4 | 3.78 × 10−4 |
| LPG car | 0 | 0 | 1.57 × 10−5 | −9.21 × 10−7 | 0 | 3.75 × 10−5 | 1.89 × 10−5 |
| diesel truck/bus | 0 | 2.14 × 10−4 | 3.35 × 10−4 | −2.22 × 10−5 | 0.00207 | 0.0018 | 2.27 × 10−4 |
| Type of Accident | Exponent—Exp | Unit Cost—W [EUR/Accident] |
|---|---|---|
| fatal | 2.6 | 43,596 |
| serious injury | 1.5 | 28,616 |
| slightly injury | 1.0 | 18,060 |
| property-only damage | 0.8 | 1937 |
| all injury | 1.2 | 23,338 |
| Time Slots | Travel for Work | Travel for Pleasure |
|---|---|---|
| 7.00–11.00 | 80% | 20% |
| 11.00–17.00 | 20% | 80% |
| 17.00–20.00 | 50% | 50% |
| 20.00–24.00 | 5% | 95% |
| 24.00–7.00 | 30% | 70% |
| Evaluation Indicators | Case Study (a) | Case Study (b) | Percentage Change |
|---|---|---|---|
| Total societal cost of travel | EUR 1472.54 | EUR 1053.39 | (−) 28.46% |
| Total vehicles CO2 emissions | 836,589 g | 603,289 g | (−) 27.89% |
| Total vehicles NOx emissions | 2638.6 g | 2117.8 g | (−) 19.74% |
| Total vehicles VOC emissions | 923.2 g | 636.9 g | (−) 31.01% |
| Total vehicles PM emissions | 215.8 g | 147.3 g | (−) 31.74% |
| Average vehicle fuel consumption | 0.149 L/veh | 0.117 L/veh | (−) 21.48% |
| Average vehicle travel time | 291 s | 267 s | (−) 8.25% |
| Mean traffic flow | 1124 veh/h | 1137 veh/h | (+) 1.16% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koukounaris, A.I.; Stephanedes, Y.J. Connected Intelligent Transportation System Model to Minimize Societal Cost of Travel in Urban Networks. Sustainability 2023, 15, 15383. https://doi.org/10.3390/su152115383
Koukounaris AI, Stephanedes YJ. Connected Intelligent Transportation System Model to Minimize Societal Cost of Travel in Urban Networks. Sustainability. 2023; 15(21):15383. https://doi.org/10.3390/su152115383
Chicago/Turabian StyleKoukounaris, Athanasios I., and Yorgos J. Stephanedes. 2023. "Connected Intelligent Transportation System Model to Minimize Societal Cost of Travel in Urban Networks" Sustainability 15, no. 21: 15383. https://doi.org/10.3390/su152115383
APA StyleKoukounaris, A. I., & Stephanedes, Y. J. (2023). Connected Intelligent Transportation System Model to Minimize Societal Cost of Travel in Urban Networks. Sustainability, 15(21), 15383. https://doi.org/10.3390/su152115383