
Damping of Frequency and Power System Oscillations with DFIG Wind Turbine and DE Optimization
 , , , ,
, , , ,  and
and
Abstract
:1. Introduction
1.1. Motivation and Incitement
1.2. Literature Review
1.3. Contributions and Paper Organization
- It comprehensively discusses the significance of utilizing DFIG wind turbines in damping power system oscillation and in stabilizing system frequency.
- With increased wind penetration from 8% to 10%, improved power system stability is achieved.
- The effectiveness of the proposed control scheme in damping power system oscillation and in balancing grid system frequency is proven experimentally by comparing with and without controller cases.
1.4. Research Gaps
- The widespread use or penetration of renewable energy and distributed generation.
- Considering the fluctuations of some important parameters in modern power systems, such as total inertia, damping coefficient, and stability indices.
- Online stability and reliability problems in the power system.
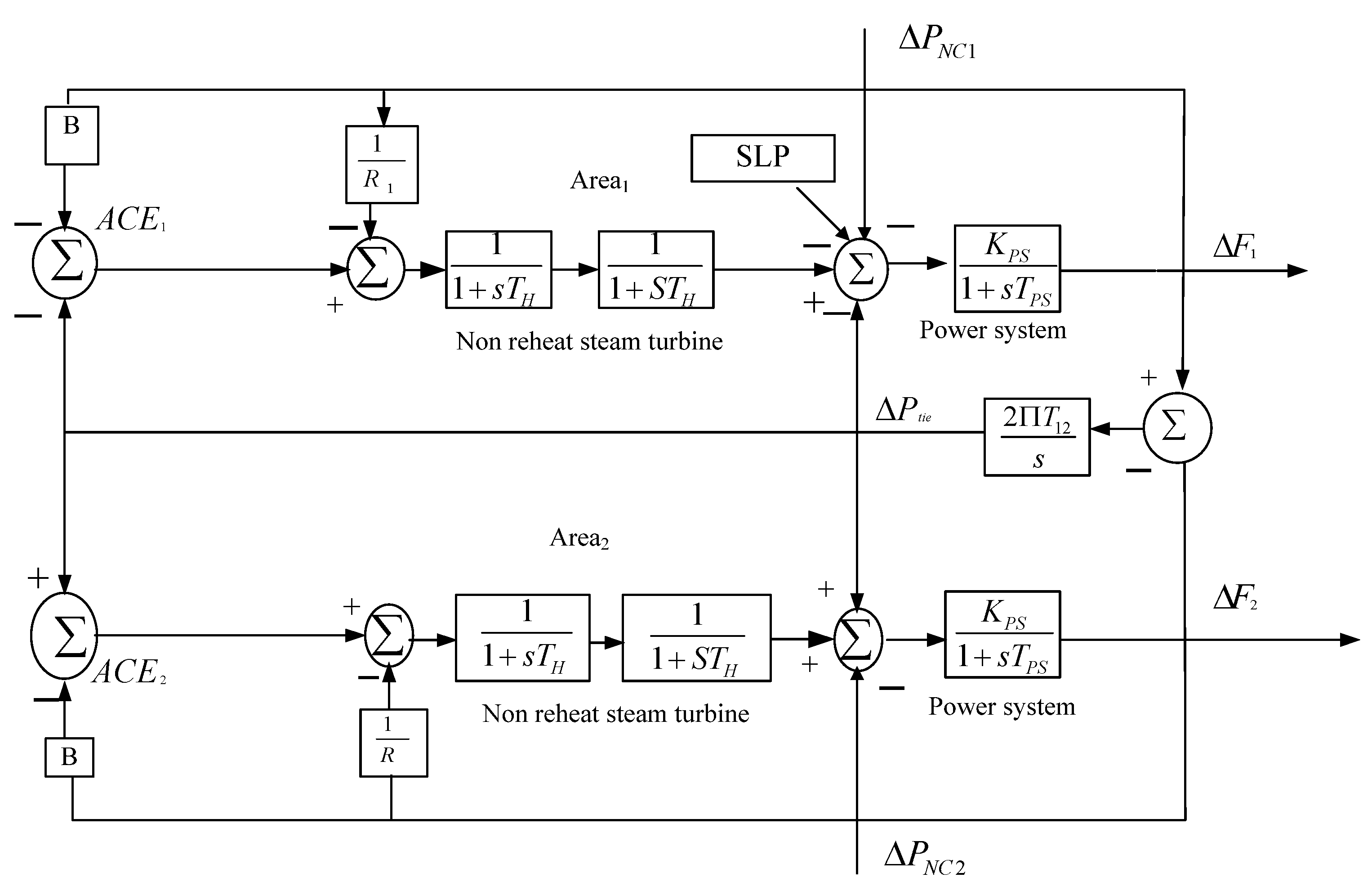
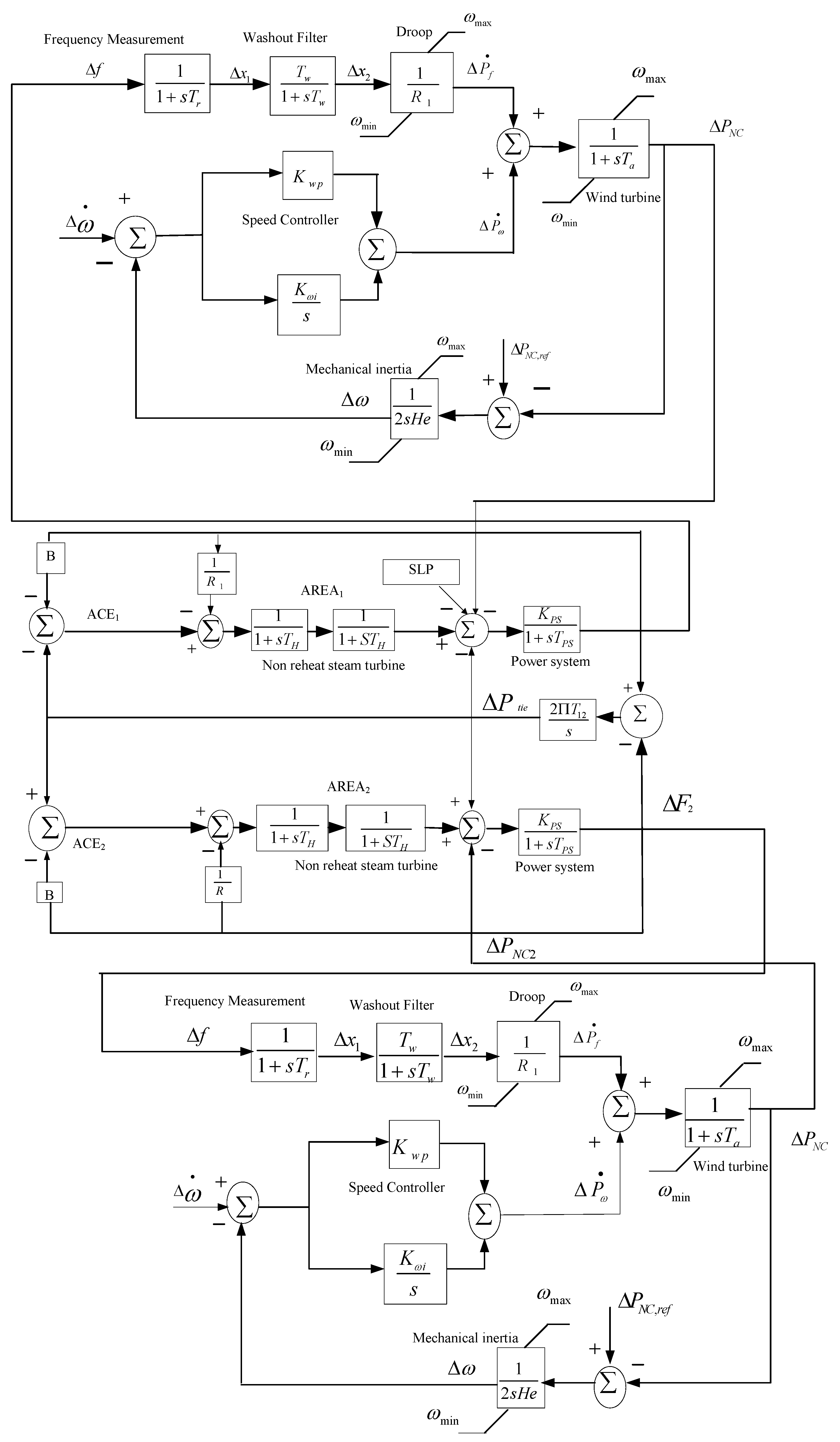
2. System Modeling and Wind Power Equation
2.1. Wind Power Equation
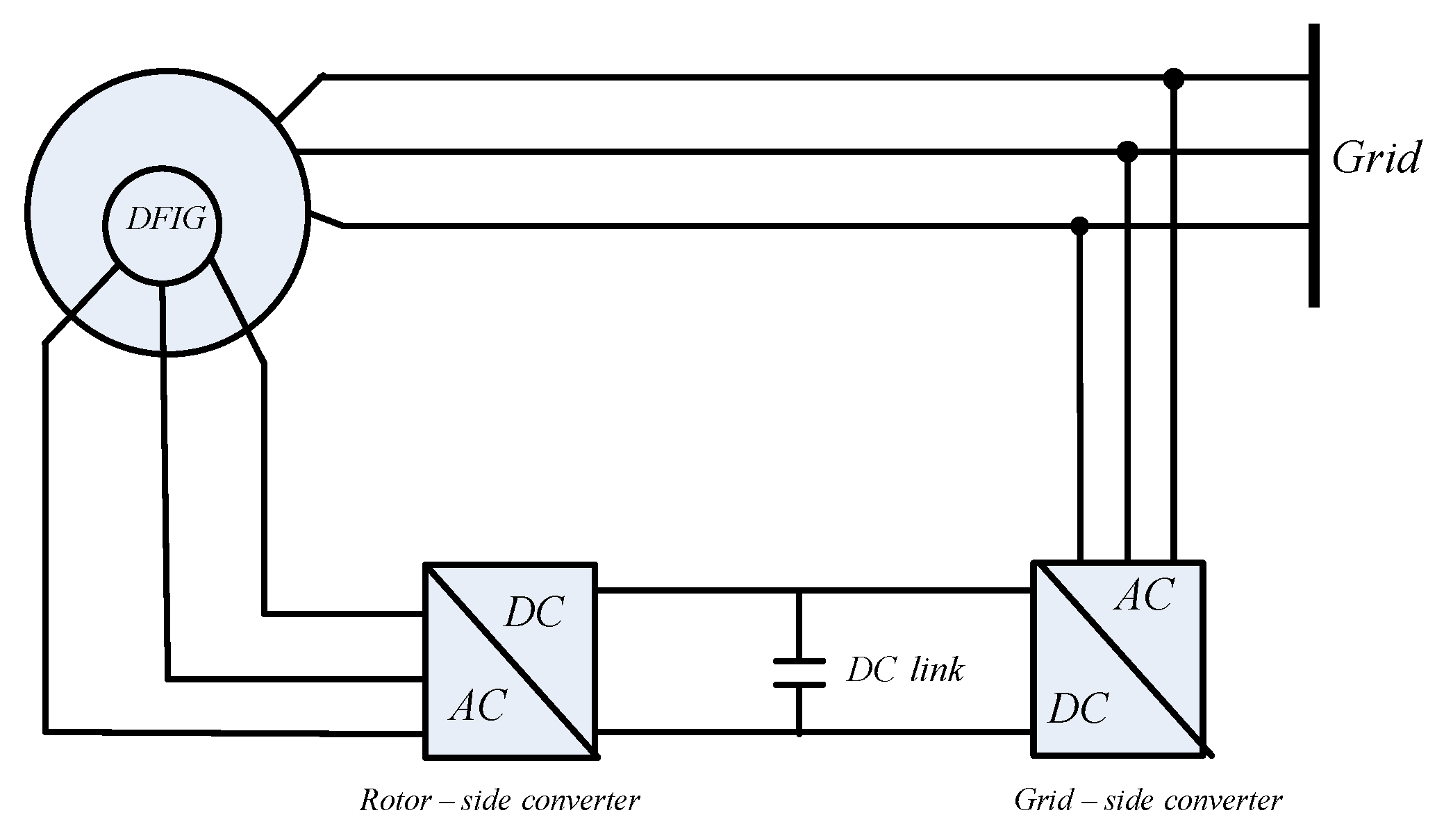
2.2. DFIG Wind Turbine
2.3. Control System of DFIG
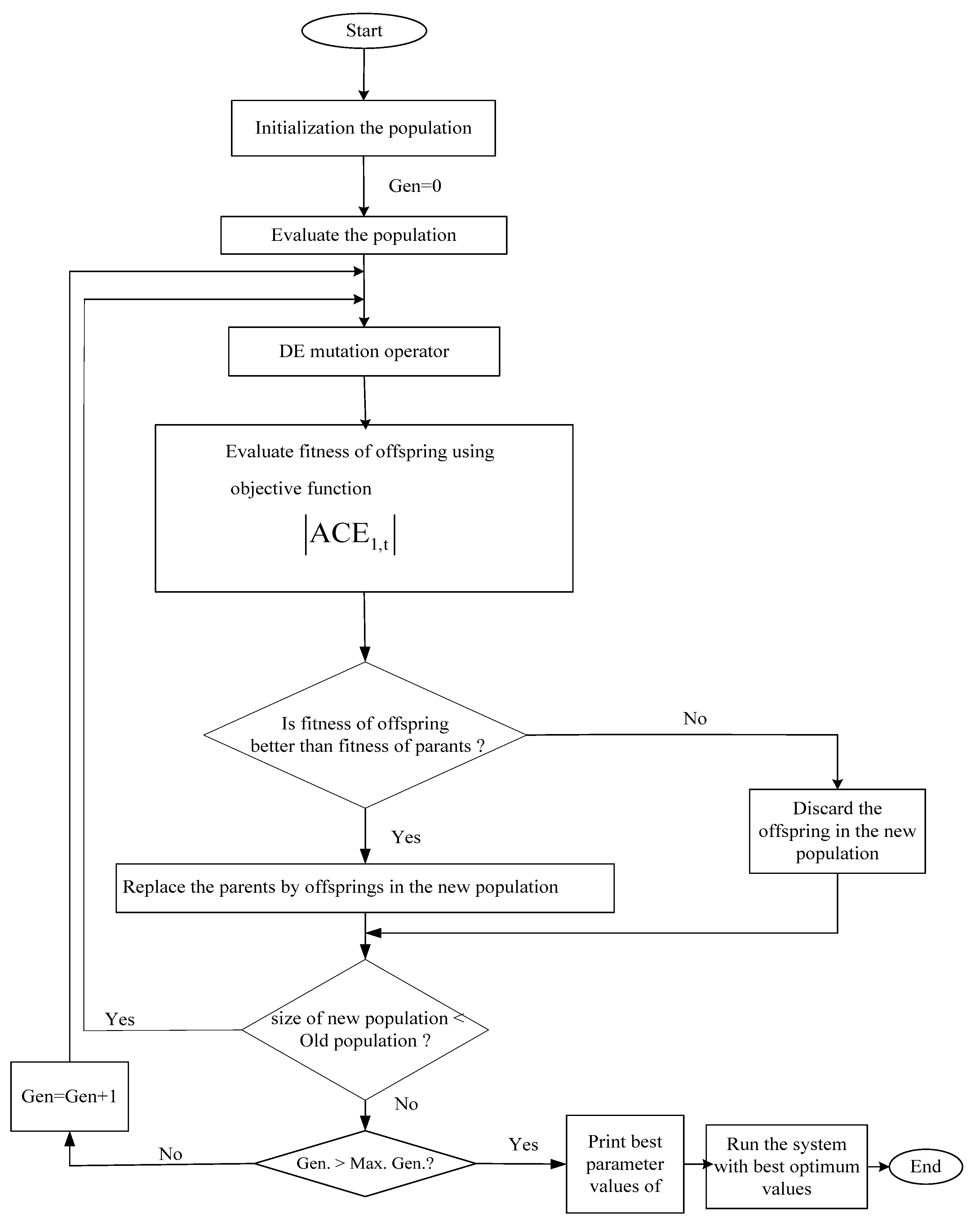
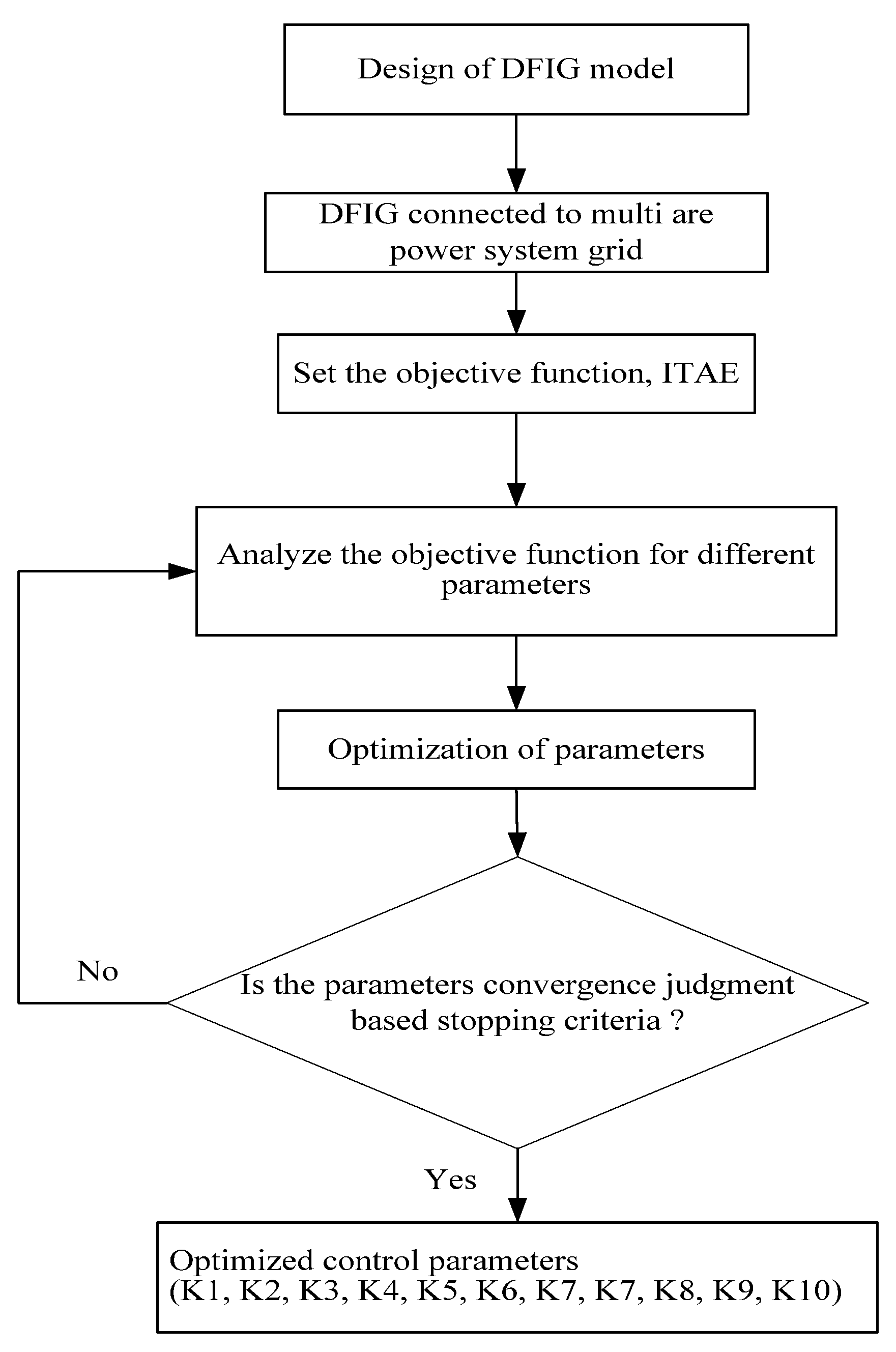
3. Methodology
3.1. Optimization Problem
3.2. Overview of the Methodology
4. Results and Discussions
4.1. Case Study 1: Without Controller and without DFIG
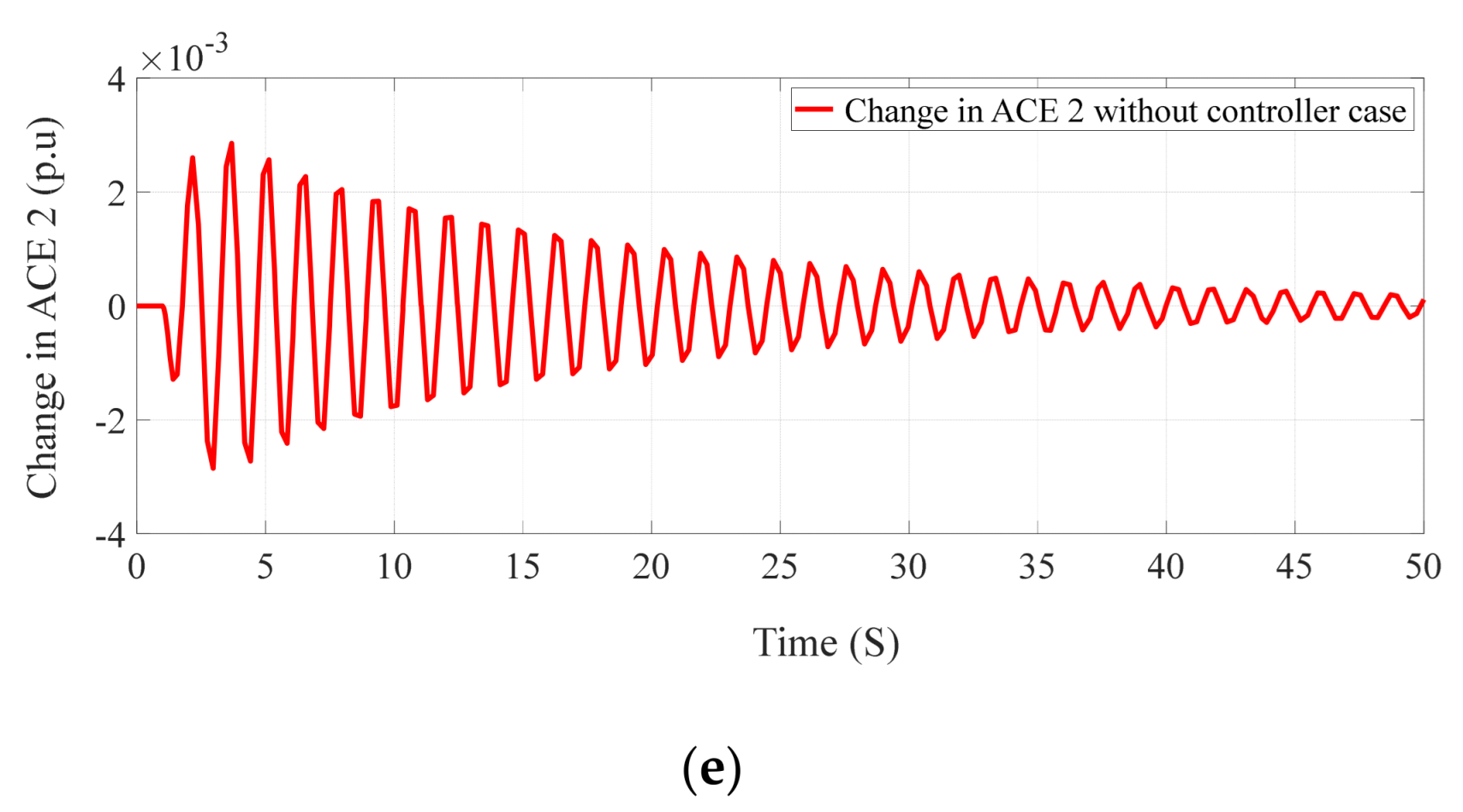
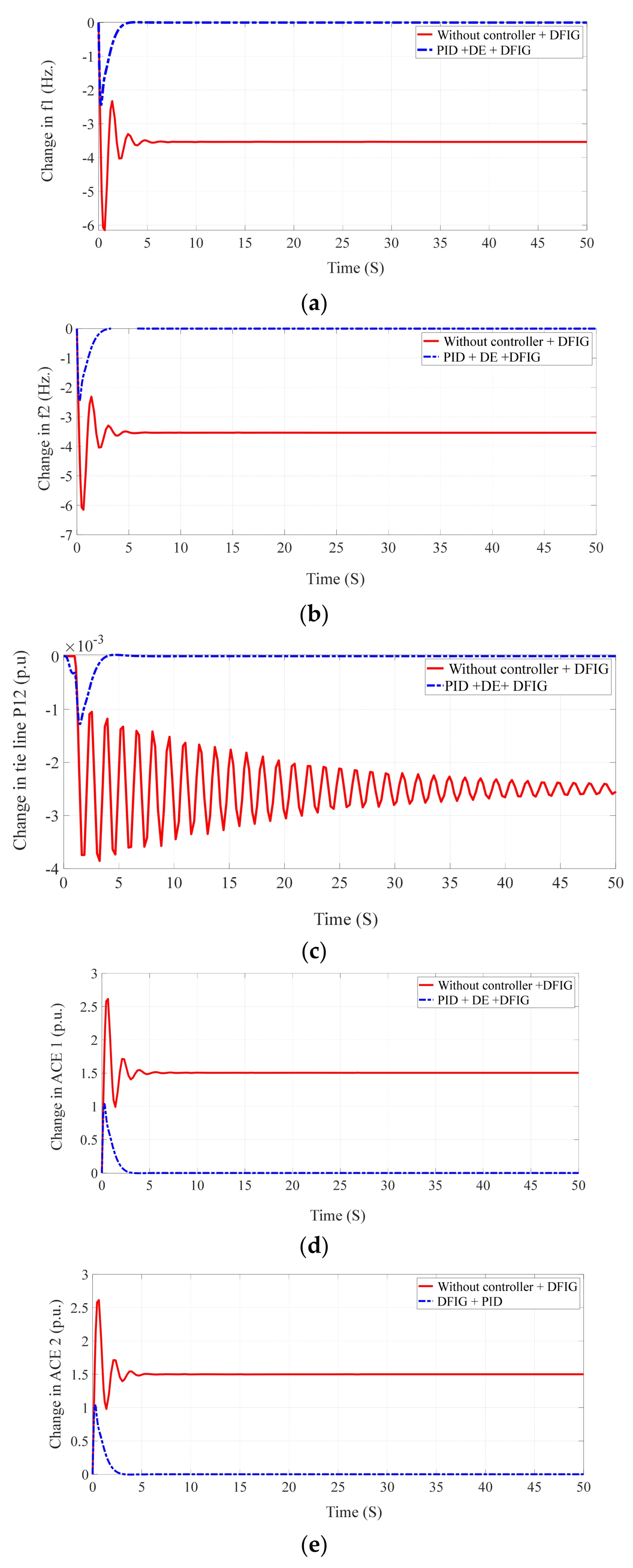
4.2. Case Study 2: Without Controller and with DFIG
4.3. Case Study 3: DFIG + PID
4.4. Discussions
5. Conclusions
6. Current Limitations and Future Scope
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DFIG | Double fed induction generator |
| RESs | Renewable energy resources |
| ITAE | Integral time multiplied absolute error |
| ISE | Integral square error |
| ITSE | Integral time multiplied square error |
| IAE | Integral absolute error |
| DE | Differential evolution |
| SLP | Step load perturbation |
| ACE | Area control error |
| ST | Settling time |
| IPFC | Interline power flow controller |
| ST | Settling time |
| AGC | Automatic generation control |
| PMSG | Permanent magnet synchronous generator |
| DFIG | Doubly fed induction generator |
| FSWT | Fixed speed wind turbine |
| IG | Induction generator |
| VSWTs | Variable speed wind turbines |
| PSS | Power system stabilizer |
| SMC | Sliding mode control |
| POD | Power oscillations damper |
| MPC RSC GSC | Model predictive control Rotor side converter Grid side converter |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.No | Area1 | Area 2 | Description | Value |
|---|---|---|---|---|
| 1 | Regulation droop | 2.4 Hz (p.u.MW) | ||
| 2 | Biasing coefficient | 0.425p.u.MW/Hz | ||
| 3 | Wind turbine inertia | 3.5 p.u.MW.sec | ||
| 4 | DFIG turbine | 0.2 s | ||
| 5 | Washout filter time constant | 6 s | ||
| 6 | Transducer time constant | 15 s | ||
| 7 | Power system gain | 120 Hz (p.u.MW) | ||
| 8 | Governor time constant | 0.08 s | ||
| 9 | Turbine time constant | 0.3 s | ||
| 10 | Power system time constant | 20 s | ||
| 11 | DFIG proportional controller gain | 1 | ||
| 12 | DFIG integral controller gain | 0.1 | ||
| 13 | Area size ratio coefficient | −1 | ||
| 14. | Tie-line synchronizing coefficient | 0.0866 p.u.MW/Hz | ||
| 15 | rho | |||
| 16 | velocity cube | m/s | ||
| 17 | A | area | ||
| 18 | Cp | power coefficient |
References
- Manzoor, S.; Bakhsh, F.I.; Mufti, M.U.D. Coordinated control of VFT and fuzzy based FESS for frequency stabilization of wind penetrated multi-area power system. Wind. Eng. 2022, 46, 413–428. [Google Scholar] [CrossRef]
- Tiwari, R.; Babu, N.R. Recent developments of control strategies for wind energy conversion system. Renew. Sustain. Energy Rev. 2016, 66, 268–285. [Google Scholar] [CrossRef]
- Doan, T.T.; Van Tran, Q. Offshore wind power-the new trend for economic development and security of island sovereignty. J. Min. Earth Sci. 2022, 63, 74–81. [Google Scholar] [CrossRef]
- Zare, S.G.; Alipour, M.; Hafezi, M.; Stewart, R.A.; Rahman, A. Examining wind energy deployment pathways in complex macro-economic and political settings using a fuzzy cognitive map-based method. Energy 2022, 238, 121673. [Google Scholar] [CrossRef]
- Jung, C.; Schindler, D. On the influence of wind speed model resolution on the global technical wind energy potential. Renew. Sustain. Energy Rev. 2022, 156, 112001. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Control; Springer: New York, NY, USA, 2014. [Google Scholar]
- Chowdhury, B.H.; Chellapilla, S. Double-fed induction generator control for variable speed wind power generation. Electr. Power Syst. Res. 2006, 76, 786–800. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z. Overview of different wind generator systems and their comparisons. IET Renew. Power Gener. 2009, 2, 123–138. [Google Scholar] [CrossRef]
- Hughes, F.M.; Anaya-Lara, O.; Jenkins, N.; Strbac, G. Control of DFIG based wind generation for power network support. IEEE Trans. Power Syst. 2005, 20, 1958–1966. [Google Scholar] [CrossRef]
- Shankar, R.; Pradhan, S.R.; Chatterjee, K.; Mandal, R. A comprehensive state of the artliterature survey on LFC mechanism for power systems. Renew. Sustain. Energy Rev. 2017, 76, 185–207. [Google Scholar] [CrossRef]
- Yousef, H.A.; Al-Kharusi, K.; Albadi, M.H.; Hosseinzadeh, N. Load frequency control of a multi-area power system: An adaptive fuzzy logic approach. IEEE Trans. Power Syst. 2014, 29, 1822–1830. [Google Scholar] [CrossRef]
- Liu, J.; Yao, Q.; Hu, Y. Model predictive control for load frequency of hybrid power system with wind power and thermal power. Energy 2019, 172, 555–565. [Google Scholar] [CrossRef]
- Xu, D.; Liu, J.; Yan, X.G.; Yan, W. A novel adaptive neural network constrained control for a multi-area interconnected power system with hybrid energy storage. IEEE Trans. Ind. Electron. 2018, 65, 6625–6634. [Google Scholar] [CrossRef]
- Kushwaha, V.; Pandey, K.; Sehrawat, S.; Sharma, D. Adaptive neuro-fuzzy based load frequency controller for three area inter-connected hydrothermal power system. In Proceedings of the 2nd International Innovative Applications of Computational Intelligence on Power, Energy and Controls with their Impact on Humanity (CIPECH), Ghaziabad, India, 18–19 November 2016; pp. 34–38. [Google Scholar] [CrossRef]
- Li, H.; Wang, X.; Xiao, J. Adaptive event-triggered load frequency control for interconnected microgrids by observer-based sliding mode control. IEEE Access 2019, 7, 68271–68280. [Google Scholar] [CrossRef]
- Lu, K.; Zhou, W.; Zeng, G.; Zheng, Y. Constrained population extremal optimization-based robust load frequency control of multi-area interconnected power system. Int. J. Electr. Power Energy Syst. 2019, 105, 249–271. [Google Scholar] [CrossRef]
- Feleke, S.; Satish, R.; Tatek, W.; Abdelaziz, A.Y.; El-Shahat, A. DE-Algorithm-Optimized Fuzzy-PID Controller for AGC of Integrated Multi Area Power System with HVDC Link. Energies 2022, 15, 6174. [Google Scholar] [CrossRef]
- Raju, M.; Saikia, L.C.; Sinha, N. Load frequency control of a multi-area system incorporating distributed generation resources, gate controlled series capacitor along with high-voltage direct current link using hybrid ALO-pattern search optimised fractional order controller. IET Renew. Power Gener. 2019, 13, 330–341. [Google Scholar] [CrossRef]
- Panwar, A.; Sharma, G.; Nasiruddin, I.; Bansal, C.R. Frequency stabilization of hydro–hydro power system using hybrid bacteria foraging PSO with UPFC and HAE. Electr. Power Syst. Res. 2018, 161, 74–85. [Google Scholar] [CrossRef]
- Tan, A.; Lin, X.; Sun, J.; Lyu, R.; Li, Z.; Peng, L.; Khalid, M.S. A novel DFIG damping control for power system with high wind power penetration. Energies 2016, 9, 521. [Google Scholar] [CrossRef]
- Zuo, J.; Li, Y.; Shi, D.; Duan, X. Simultaneous robust coordinated damping control of power system stabilizers (PSSs), static var compensator (SVC) and doubly-fed induction generator power oscillation dampers (DFIG PODs) in multimachine power systems. Energies 2017, 10, 565. [Google Scholar] [CrossRef]
- Du, W.; Chen, X.; Wang, H. DFIG oscillation modes causing strong dynamic interactions to degrade the damping of power system low-frequency electromechanical oscillations. Electr. Power Compon. Syst. 2019, 47, 288–300. [Google Scholar] [CrossRef]
- He, P.; Arefifar, S.A.; Li, C.; Wen, F.; Ji, Y.; Tao, Y. Enhancing oscillation damping in an interconnected power system with integrated wind farms using unified power flow controller. Energies 2019, 12, 322. [Google Scholar] [CrossRef]
- Zarifakis, M.; Coffey, W.T.; Kalmykov, Y.P.; Titov, S.V.; Byrne, D.J.; Carrig, S.J. Active damping of power oscillations following frequency changes in low inertia power systems. IEEE Trans. Power Syst. 2019, 34, 4984–4992. [Google Scholar] [CrossRef]
- Odoh, T.E.; Sabo, A.; Wahab, N.I.A. Mitigation of Power System Oscillation in a DFIG-Wind Integrated Grid: A Review. Appl. Model. Simul. 2022, 6, 134–149. [Google Scholar]
- Debouza, M.; Al-Durra, A. Grid ancillary services from doubly fed induction generator-based wind energy conversion system: A review. IEEE Access 2018, 7, 7067–7081. [Google Scholar] [CrossRef]
- Kamel, O.M.; Abdelaziz, A.Y.; Zaki Diab, A.A. Damping Oscillation techniques for wind farm DFIG integrated into inter-connected power system. Electr. Power Compon. Syst. 2020, 48, 1551–1570. [Google Scholar] [CrossRef]
- Carreras, B.; Reynolds Barredo, J.M.; Dobson, I.; Newman, D.E. Validating the OPA cascading blackout model on a 19402 bus transmission network with both mesh and tree structures. Hawaii Int. Conf. Syst. Sci. 2019. [Google Scholar] [CrossRef]
- Faza, A. A probabilistic model for estimating the effects of photovoltaic sources on the power systems reliability. Reliab. Eng. Syst. Saf. 2018, 171, 67–77. [Google Scholar] [CrossRef]
- Civelek, Z.; Çam, E.; Lüy, M.; Mamur, H. Proportional–integral–derivative Parameter Optimisation of Blade Pitch Controller in Wind Turbines by a New Intelligent Genetic Algorithm. IET Renew. Power Gener. 2016, 10, 1220–1228. [Google Scholar] [CrossRef]
- Macedo, A.V.A.; Mota, S.W. Wind turbine pitch angle control using fuzzy logic. In Proceedings of the 2012 Sixth IEEE/PES Transmission and Distribution: Latin America Conference and Exposition (T&D-LA), Montevideo, Uruguay, 3–5 September 2012. [Google Scholar] [CrossRef]
- Imtiyaz, T.; Bakhsh, F.; Jain, A. Intelligent Modelling and Analysis of Direct Torque Control-Space Vector Modulation of Doubly Fed Induction Generator (DFIG). Intell. Data Anal. Power Energy Syst. 2022, 802, 45–59. [Google Scholar] [CrossRef]
- Abo-Khalil, A.G.; Alghamdi, A.S.; Eltamaly, A.M.; Al-Saud, M.S.; RP, P.; Sayed, K.; Bindu, G.R.; Tlili, I. Design of state feedback current controller for fast synchronization of DFIG in wind power generation systems. Energies 2019, 12, 2427. [Google Scholar] [CrossRef]
- Tang, Y.; He, H.; Ni, Z.; Wen, J.; Sui, X. Reactive power control of grid-connected wind farm based on adaptive dynamic programming. Neurocomputing 2014, 125, 125–133. [Google Scholar] [CrossRef]
- Gomez, L.A.; Lourenço, L.F.; Grilo, A.P.; Salles, M.B.; Meegahapola, L.; Sguarezi Filho, A.J. Primary frequency response of microgrid using doubly fed induction generator with finite control set model predictive control plus droop control and storage system. IEEE Access 2020, 8, 189298–189312. [Google Scholar] [CrossRef]
- Knuppel, T.; Nielsen, J.N.; Jensen, K.H.; Dixon, A.; Ostergaard, J. Power oscillation damping controller for wind power plant utilizing wind turbine inertia as energy storage. In Proceedings of the IEEE Power & Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011. [Google Scholar]
- Rahimi, M. Coordinated control of rotor and grid sides converters in DFIG based wind turbines for providing optimal reactive power support and voltage regulation. Sustain. Energy Technol. Assess. 2017, 20, 47–57. [Google Scholar] [CrossRef]
- Ibraheem, N.R.K.; Sharma, G. Study on participation dynamic of wind turbines in automatic generation control of power systems. Electr. Power Compon. Syst. 2015, 43, 44–55. [Google Scholar] [CrossRef]
- Malik, H.; Iqbal, A.; Joshi, P.; Agrawal, S.; Bakhsh, F.I. Metaheuristic and Evolutionary Computation: Algorithms and Applications; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar] [CrossRef]
- Centeno-Telleria, M.; Zulueta, E.; Fernandez-Gamiz, U.; Teso-Fz-Betoño, D.; Teso-Fz-Betoño, A. Differential evolution optimal parameters tuning with artificial neural network. Mathematics 2021, 9, 427. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]





| Objective Function | Optimum Controller Gains | |||
|---|---|---|---|---|
| ITAE | K7 | K8 | K9 | K10 |
| 2.9999 | 1.8306 | 2.9735 | 0.9999 | |
| Measured Parameters | Rise Time | ST | US | OS |
|---|---|---|---|---|
| Change in f1 | 0.1649 | 4.1152 | −6.1514 | −2.3269 |
| Change in f2 | 0.1649 | 4.0752 | −6.1514 | −2.3117 |
| Change in p1 | 0.3036 | 49.3891 | −0.0039 | 0.0010 |
| Change in ACE1 | 0.1652 | 4.1076 | 0.9911 | 2.6143 |
| Change in ACE2 | 0.1646 | 4.0830 | 0.9804 | 2.6143 |
| Objective Function | Optimum Controller Gains | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ITAE | K1 | K2 | K3 | K4 | K5 | K6 | K7 | K8 | K9 | K10 |
| 2.3961 | 2.9999 | 0.9999 | 2.4005 | 2.9999 | 0.9999 | 2.6784 | 2.9999 | 2.8451 | 1.0257 | |
| Measured Parameters | Rise Time | ST | US | OS |
|---|---|---|---|---|
| Change in f1 | 1.9405 × 10-4 | 2.6540 | −2.4514 | 0.0084 |
| Change in f2 | 1.9405 × 10-4 | 2.6616 | −2.4510 | 0.0082 |
| Change in p1 | 0.0142 | 4.8464 | −0.0013 | 0.0000 |
| Change in ACE1 | 2.0097 × 10-4 | 2.6602 | −0.0036 | 1.0419 |
| Change in ACE2 | 1.9082 × 10-4 | 2.6554 | −0.0036 | 1.00416 |
| Objective Function | Optimum Controller Gains | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ITAE | K1 | K2 | K3 | K4 | K5 | K6 | K7 | K8 | K9 | K10 |
| 2.3961 | 2.9999 | 0.9999 | 2.4005 | 2.9999 | 0.9999 | 2.8927 | 2.9999 | 3.0727 | 1.0257 | |
| Objective Function | Optimum Controller Gains | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ITAE | K1 | K2 | K3 | K4 | K5 | K6 | K7 | K8 | K9 | K10 |
| 2.3961 | 2.9999 | 0.9999 | 2.4005 | 2.9999 | 0.9999 | 2.9462 | 2.9999 | 3.1296 | 1.0257 | |
| Measured Parameters | ST | US | OS |
|---|---|---|---|
| Change in f1 | 2.6539 | −2.4513 | 0.0084 |
| Change in f2 | 2.6616 | −2.4509 | 0.0082 |
| Change in p1 | 4.8413 | −0.0013 | 0.0000 |
| Change in ACE1 | 2.6601 | −0.0036 | 1.0418 |
| Change in ACE2 | 2.6554 | −0.0035 | 1.0416 |
| Measured Parameters | ST | US | OS |
|---|---|---|---|
| Change in f1 | 2.6538 | −2.4512 | 0.0084 |
| Change in f2 | 2.6614 | −2.4508 | 0.0082 |
| Change in p1 | 4.8411 | −0.0013 | 0.0000 |
| Change in ACE1 | 2.6600 | −0.0036 | 1.0418 |
| Change in ACE2 | 2.6553 | −0.0035 | 1.0416 |
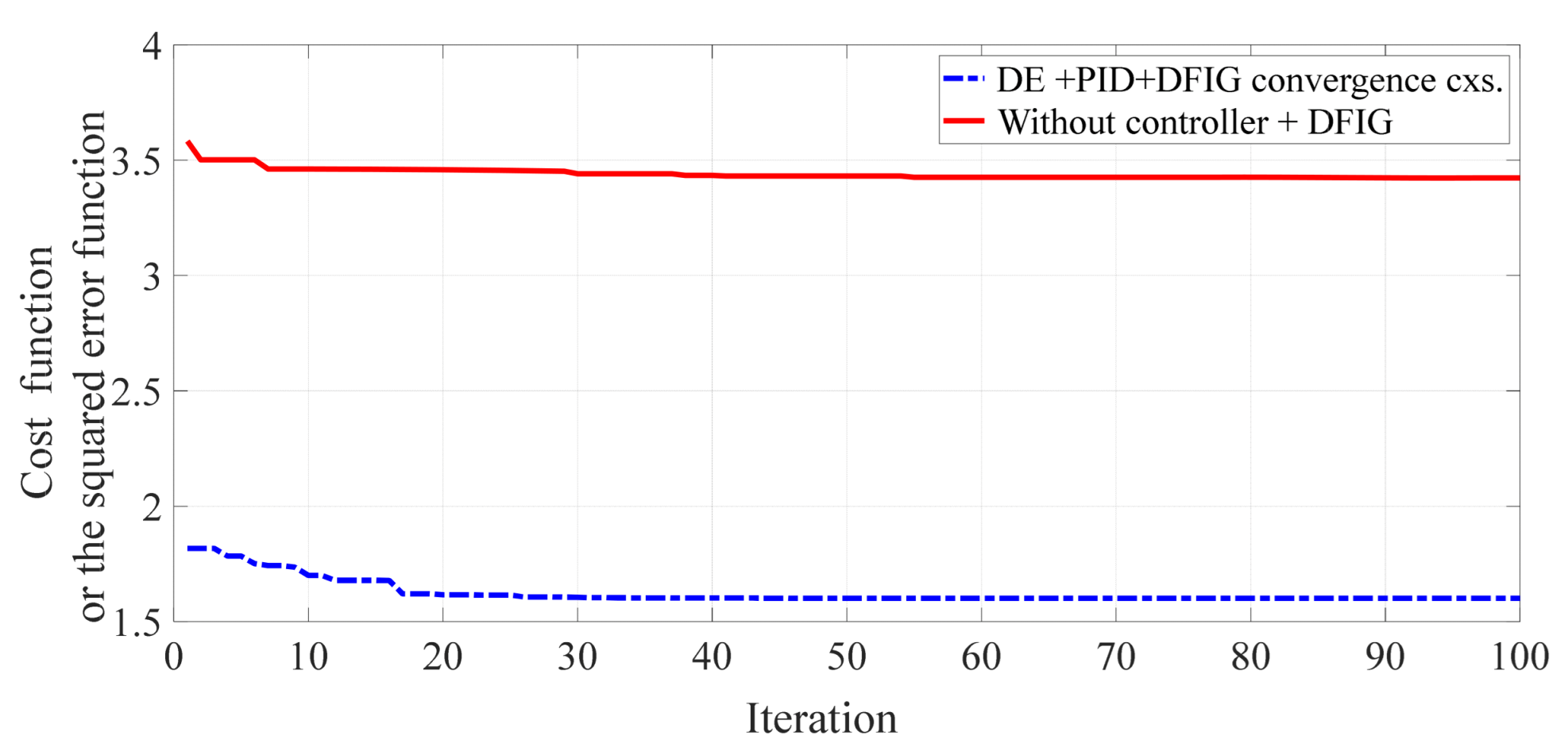
| Analyzed Methods | ITAE Objective Function Values |
|---|---|
| PID+DFIG-optimized DE | 1.6008 |
| Without controller | 6.7865 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feleke, S.; Satish, R.; Pydi, B.; Anteneh, D.; Abdelaziz, A.Y.; El-Shahat, A. Damping of Frequency and Power System Oscillations with DFIG Wind Turbine and DE Optimization. Sustainability 2023, 15, 4751. https://doi.org/10.3390/su15064751
Feleke S, Satish R, Pydi B, Anteneh D, Abdelaziz AY, El-Shahat A. Damping of Frequency and Power System Oscillations with DFIG Wind Turbine and DE Optimization. Sustainability. 2023; 15(6):4751. https://doi.org/10.3390/su15064751
Chicago/Turabian StyleFeleke, Solomon, Raavi Satish, Balamurali Pydi, Degarege Anteneh, Almoataz Y. Abdelaziz, and Adel El-Shahat. 2023. "Damping of Frequency and Power System Oscillations with DFIG Wind Turbine and DE Optimization" Sustainability 15, no. 6: 4751. https://doi.org/10.3390/su15064751