1. Introduction
Every year, people worldwide are impacted by disasters such as floods, earthquakes, storms, droughts, wars, and more. These natural disasters seriously harm nations all over the world. Each year, there are over 599 disasters that affect more or less 200 million people and result in the deaths of close to 75,000 individuals. [
1]. Unfortunately, it is predicted that in the coming years, ecological and human-made disasters will increase five times [
2]. Due to the increasing incidence of accidents, many scholars have set their sights on disaster management (DM). Disaster management is the art of efficiently planning for and acting in response to disasters [
3]. Resources must be systematically arranged in order to lessen the harm caused by disasters. The management of the duties associated with disaster prevention, readiness, response, and recovery also entails a systematic approach. DM intends to assist at-risk individuals in mitigating or recovering from disaster consequences [
4]. The four stages of DM are mitigation, preparedness, response, and recovery. Humanitarian logistics is one of the operations responsible for implementing the three stages of disaster management: preparation, response, and recovery. In the context of disaster prevention, humanitarian logistics refers to the process of transporting individuals from crisis-affected areas to secure locations. Emergency response planning has advanced significantly over time to lessen the effects of these catastrophes. Planning for safe shelters should begin before the crisis arises to protect the public from harm [
5,
6].
The Philippines ranks third among countries which are most susceptible to disasters because of its geographical location. The country usually experiences typhoons, earthquakes, floods, volcanic eruptions, landslides, and fires, to name just a few. Between 1900 and 2012, it experienced 531 catastrophes, affecting more than 160 million people and resulting in losses of USD 10.5 billion. In 2013, Typhoon Haiyan (Yolanda), which affected 26 million people and killed at least 8000 people, struck the Philippines and caused the most devastation. Typically, 20 tropical cyclones hit the waters of the Philippines yearly; typhoons are often the most devastating natural catastrophes to hit the nation [
7].
Over the past few years, the Philippines has paid close attention to and made advancements in disaster risk reduction. Numerous organizations and stakeholders have spearheaded projects and activities to strengthen the initiatives. To reduce the socio-economic and ecological effects of disasters, especially those caused by climate change, Republic Act 10121, passed in May 2010, recognizes the need to implement a disaster risk reduction and management approach that is general, inclusive, cohesive, and practical. It also encourages the involvement and participation of all districts and stakeholders concerned at all tiers, particularly the residents [
8]. After the onslaught of Typhoon Haiyan (Yolanda) in the Philippines in 2013, the government and aid organizations have concentrated on disaster risk reduction and preparedness.
With the frequency of typhoons in the country, the use of schools as evacuation shelters is prevalent in the Philippines. However, this is no longer advisable in light of the Department of Interior and Local Government (DILG) Memorandum Circular No. 122 series of 2018 [
9]. It urges each local government unit (LGU) to prioritize the construction of robust, secure, and appropriately designed evacuation facilities. It must meet the nation’s building safety standards and be receptive to potential users’ needs. In response to this DILG Memorandum Circular, each LGU shall assign an evacuation center in each barangay in their municipality. However, most barangays allocated either the barangay hall or covered court as the designated evacuation center, which does not fulfill the national building safety regulations and needs to be more responsive to their potential users’ needs.
Despite the availability of many research studies related to humanitarian supply chains and humanitarian network designs, topics on facility location, network design, and evacuation planning are each dealt with separately, when in fact they should be treated with high degree of inclusivity. Also, the majority of models created to quantify decisions made in relation to evacuation travel take place in developed nations, where decision-making factors such as culture, capacity, and resources are different from those in developing nations [
10]. Furthermore, very limited studies have been conducted in the Philippines on these topics. The majority of the literature on humanitarian logistics in the Philippines is concerned with the sustainability of the humanitarian supply chain, in general, as well as the study of evacuation travel behavior [
10,
11,
12,
13]. Gutierrez and Mutuc [
14] proposed a model for humanitarian supply chain in Marikina City using linear programming, employing the Center of Gravity Method. Though the Center of Gravity Method locates the facilities where it displays similarity between volume and distance of demand throughout a network of consumer locations. Its application is limited to regions with no bodies of water. Further, it only considers the location of distribution hubs, not the location of evacuation centers or temporary shelters. This investigation was conducted under this framework. The number and location of local distribution centers must be decided upon before the start of the disaster. This pre-positioning action is a component of disaster preparedness [
15]. At the same time, evacuation centers (or temporary shelters) and their locations need to be taken into account because they act as places where evacuees can get food, medical attention, and lodging [
16]. These two facilities should be taken into account during the pre-disaster phase. In order to assist in pre-disaster preparation, the study establishes the number of distribution and evacuation centers as well as their locations depending on the context in the Philippine conditions.
This study suggested the utilization of the model in response to the need for practical mathematical modeling and how it might contribute to the sustainability of government initiatives for disaster response in the Philippines. Initially, the number of DCs and ECs to be constructed to reduce the infrastructure cost is determined. Should the government make a significant investment, it is crucial to ascertain how many of these facilities are needed at the location. Furthermore, the facility’s site must be secured and free from hazards. Second, the evacuation route must be planned to place the facilities in areas requiring the fewest response vehicles and have the shortest travel distances. Finally, various scenarios must be taken into account to consider the worst-case and most likely outcomes. The scenarios were developed based on the survey conducted [
12], which showed that risk perception directly impacted preparedness intentions and actions. Similarly, this study considered the scenarios used by [
17] where the scenarios reflect the various levels of disaster intensity. Hence, the scenarios were created based on the time and severity of the typhoon.
The metaheuristics technique is employed to achieve these objectives. The creation of heuristic optimization algorithms can be guided by a set of rules or strategies provided by a metaheuristic, an advanced, algorithmic framework independent of constraints. It applies a heuristic optimization technique to a particular problem in accordance with the rules of a metaheuristic framework [
18]. Numerous other metaheuristics exist, but some noteworthy to mention are ant colony optimization, tabu search, simulated annealing, variable neighborhood search, and genetic/evolutionary algorithms. The most popular metaheuristics, according to Santana Robles [
19], are simulated annealing (SA), particle swarm optimization (PSO), and genetic algorithm (GA). The goal of this study is to determine how well MOPSO handles location-routing problems for planning humanitarian evacuations. Additionally, the performance of the model and the MOPSO heuristic procedure is also evaluated with those of other broadly utilized methods.
This research paper is structured as follows:
Section 2 reviews the studies on multi-objective models and humanitarian evacuation planning. Recent trends and issues on humanitarian supply chains (HSCs) were also discussed to establish the research gap.
Section 3 discusses the development of the mathematical model and the solution method;
Section 4 presents the empirical case, the numerical results and analysis, and some practical implications of the study; and
Section 5 provides the conclusions and future research undertakings from the findings of the study.
2. Literature Review
According to Habib et al. [
5], the three main areas of study in the field of humanitarian supply chain (HSC) are facility location, network design and relief distribution, and mass evacuation.
2.1. Humanitarian Supply Chain Facility Location
A relief distribution channel, consisting of warehouses, regional relief distribution centers, and central distribution hubs, is created with the intention of giving relief to the affected people following a disaster. The difficulty in this procedure is locating these facilities such that the needs of the entire disaster-affected area are met with the least amount of delivery cost and the highest degree of service. Some authors take into account resource allocation from central distribution hubs to depots and local distribution centers in addition to planning the location of the facility. These problems are referred to as location-allocation problems [
5].
In order to maximize the coverage of relief supplies in the disaster target region, Dekle et al. [
20] developed a model to position the disaster recovery facilities in the pre-disaster environment. A model for supply distribution in a municipal inundation disaster scenario was created by Chang et al. [
21] with the goal of minimizing transportation costs, facility setup expenses, and hauling costs of rescue paraphernalia. The authors took into account the position of the depot, arrangement of facility distribution, scarcity, and excess penalties. A facility location problem was proposed by Balcik and Beamon [
15] for the post-disaster situation. The problem is a maximal covering location model variant with economic and facility considerations. To accommodate the demand, they decided on a number of distribution center locations and the amount of relief goods needed at each location. The approach used by Abounacer et al. [
22] was one of exact solutions. The authors created a way to deliver the assistance from and to the demand sites in a location-transportation problem by first determining the location and number of distribution facilities. A location-allocation model with goal programming was proposed by Barzinpour and Esmaeili [
23] with the aims of expanding population collective coverage and reducing overall cost.
2.2. Humanitarian Supply Chain Network Design and Relief Distribution
In the domain of network design and relief distribution for the HSC, numerous mathematical models have been created with slight modifications in objective functions and constraints. In their study on the location-routing problem (LRP), some researchers took the routing problem and the distribution facility’s location into consideration [
5]. LRP is a method that can address the problem of simultaneously resolving the locations of facilities and vehicle paths. LRP prevents the optimization process from becoming stuck in the sub-optimal solution brought on by choosing the locations of facilities and vehicle paths independently. Because LRP can combine facility location problems (FLP) and vehicle routing problems (VRP), it may be of interest to researchers [
24]. A model for multiple-depot location-routing was proposed by Ahmadi et al. [
25]. To get the relief supplies from local depots to the afflicted individuals, they identified the locations of local warehouses and created a routing model. They created a neighborhood search algorithm and added a feature for implications for network failure, such as highway destruction and costs associated with unmet needs. LRP models have been widely implemented in a variety of fields, including parcel delivery by Bruns et al. (2000) and Wasner and Zapfel (2004); telecom network design by Billionnet et al. (2005); medical by Pourreza (2018); and environment by Toro et al. (2017). In general, cost reduction is included as one of the objective functions in most LRP models in addition to the other criteria that must be satisfied.
According to Berger et al. [
26], the LRP form of the problem, in which there are no facility or vehicle limits, is as follows:
Let
J be the set of potential facility locations and
I be the set of customer locations. A graph can be defined as
G = (
N,
V), where
N =
I ∪
J or
J ⊆
I the set of points and
V =
N ×
N is the set of edges. Along with
Pj, which is the set of viable routes for facility
j, we can define
k as a feasible route that departs from facility
j, travels to a subset of nodes, and then returns to facility
j. The IP formulation for the problem is
where
: Fixed cost of facility j
: Cost of transportation in route k associated with facility j
: 1 if facility j is chosen, 0 otherwise
: 1 if route k is connected with facility j is chosen, 0 otherwise
: 1 if route k is connected with facility j visits client i, 0 otherwise.
When each client is supplied by a single facility (constraint 1), the objective function optimizes both the fixed costs and the routing costs, making sure that only routes of selected facilities are chosen (constraint 2).
Metaheuristic methods can be used to address complex problems using large amounts of information. The metaheuristic approach allows for the production of near-optimal solutions, or good enough solutions, even while finding an optimal solution is not guaranteed. However, because computing will be done more quickly when using metaheuristic approaches, time can be saved. As a result, metaheuristic methods are ideal for use in complex situations involving vast volumes of data.
There has been extensive use of metaheuristic techniques using LRP models. This is due to a model that is getting more complicated and has multiple constraints and data applied. Bouhafs et al. [
27] decide the facilities to be opened using hybrid simulated annealing (SA) and ant colony optimization (ACO). They also determine the path to be traveled, which is determined by the ACO. Finally, Prins et al. [
28] employ the randomized extended Clarke and Wright algorithm (RECWA) to build an initial solution. The memetic algorithm with population management (MA|PM) was then employed by the authors to get a conclusion.
One of the extensively used metaheuristic techniques is particle swarm optimization (PSO). According to Hussain et al. [
29], PSO is frequently used since it is simple to apply and productive in both research and business. Marinakis [
30] also used surveys on issues with vehicle routing to illustrate the applicability of PSO. The assessment of 100 publications yielded the conclusion that PSO can offer top-notch solutions for various VRP variants. Multi-objective particle swarm optimization (MOPSO) is one sort of PSO. A variant of the PSO known as MOPSO is used to handle multi-objective optimization problems (MOOP). Liu and Kachitvichyanukul [
31] previously used MOPSO on MLRP cases and a Pareto base. According to the authors, MOPSO has a superior Pareto front quality compared to NSGA II.
2.3. Mass Evacuation
The majority of the mass evacuation area models were created for public transportation evacuation. In their model of an integrated emergency supply network, Sheu and Pan [
32] took into account public evacuation. They took into account psychological cost, operational cost, and trip distance minimization in their approach. To establish a coordinated network for emergency supplies, they combined distribution, evacuation, and medical networks. Governments remove the populace from dangerous locations ahead of time whenever a disaster such as a flood is expected. The lack of an adequate supply of bus drivers is the main issue in such circumstances. In order to calculate how many extra drivers would be necessary during an emergency evacuation operation, Morgul et al. [
33] proposed two stochastic models, with the aim of reducing the costs associated with both the unmet demand and the expenses associated with the hiring of additional board employees. In their bus-based evacuation model, Naghawi and Wolshon [
34] also assessed how a transit bus-based evacuation might affect the functionality of a regional road network.
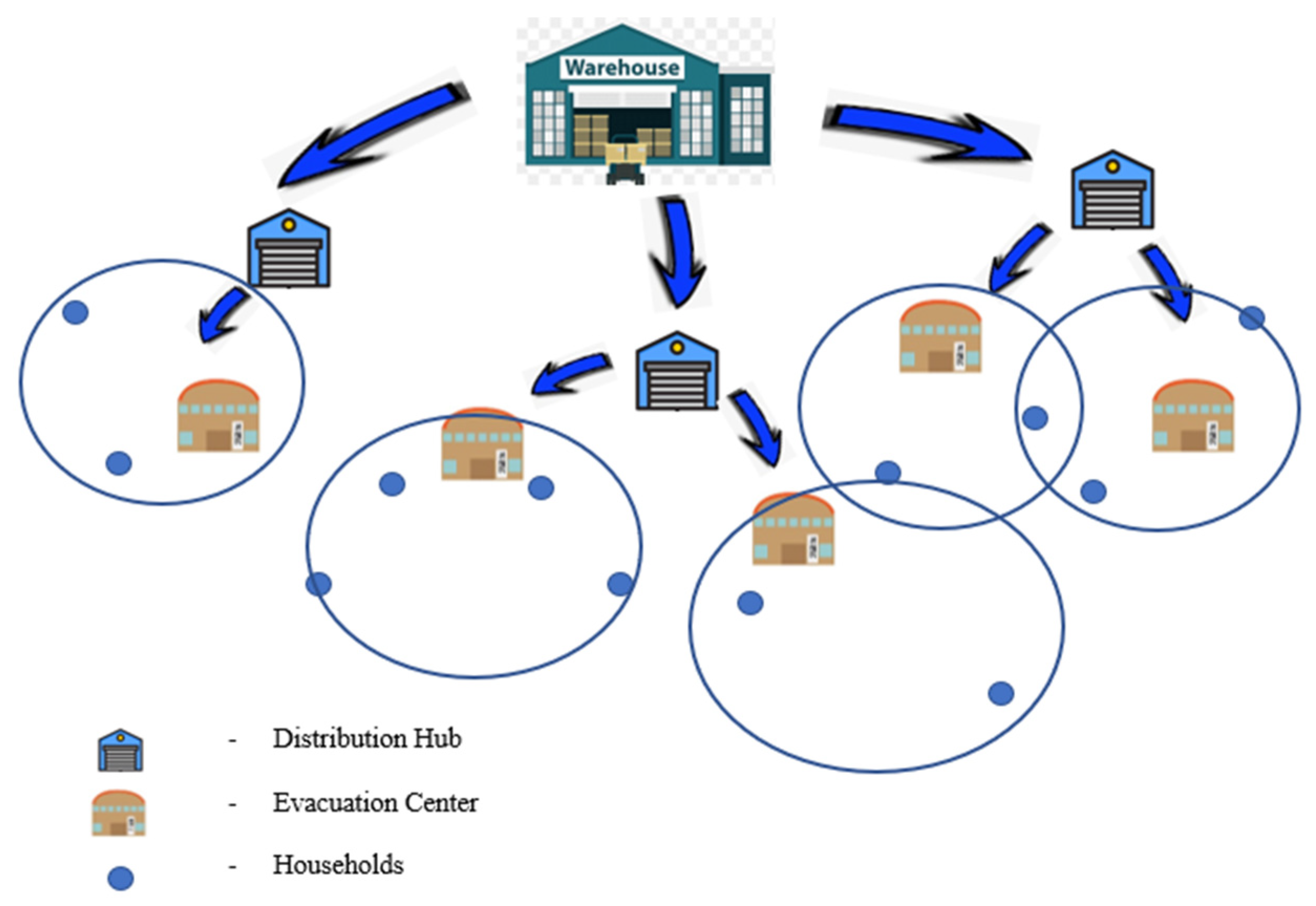
In light of the above literature, this study provided a multi-objective location-routing model to address the pre-disaster phase by optimizing the location of distribution and evacuation centers and managing mass evacuation within the required response time (golden time). It is accomplished through the use of several objective functions. The model’s objectives included minimizing investment costs for distribution hubs and evacuation centers and maximizing the coverage of these shelters to adjacent residential zones. The model ensured that evacuees are evacuated within the required response time during the evacuation process. This work aimed to offer a multi-objective, multi-level facility location-routing model for disaster management (DM) operations in the early aftermath of a disaster. The proposed model was divided into two stages: (1) identifying the ideal location of distribution hubs to allow for the shortest response time possible, followed by (2) determining the optimal allocation of individuals to evacuation centers with the shortest response time possible. In focus, the model’s objectives included minimizing the cost of creating distribution hubs and evacuation centers by selecting an adequate number of facilities. The second phase employed an optimization approach to identify the ideal location-allocation for evacuees in evacuation centers while maintaining the shortest response time possible, considering the evacuation centers’ capacity and the population of each community shown in
Figure 1.
The current study offers four contributions: it offers two different types of facilities, namely distribution hubs and evacuation centers, as its first contribution. Most studies only offer one specific type of facility. Second, the model aimed to create the humanitarian network with the shortest response time, both in terms of evacuation and relief distribution, at the lowest investment cost. Third, it takes both scenario-based and stochastic uncertainty into account at the same time. Finally, it is the only paper, to the best of our knowledge, that utilizes hazard map in modeling humanitarian facilities decisions.
4. Computational Results and Analysis
This section analyzes and evaluates the implementation of the proposed model. The model was executed in a case in Quezon province. The following subsections detail the results of the proposed model.
4.1. Case Developed
Quezon Province is located in the CALABARZON region. With an area of 8706.60 square kilometers, Quezon is the sixth-biggest province in the Philippines and the largest in the region (53.21%). The part comprises 39 municipalities, including Tayabas (a component city) and Lucena (a highly urbanized city). Four (4) congressional districts are further subdivided into 1242 small localities (barangays).
Because of its position and diverse topography, Quezon is vulnerable to geological and hydro-meteorological hazards such as storm surges, flooding, tsunami, volcanic risks, and earthquake- and earthquake-triggered landslides. From 2014 to 2017, the province is expected to have suffered losses and damages of PHP 10.16 billion due to typhoons. Typhoon Glenda in 2014 caused the most damages and losses among the typhoons that impacted the region over the same period, amounting to PHP 8.88 billion. Disasters affected several industries at the micro-level, even if the losses and damages they caused were insufficient to stop the province’s economy from growing. The enormous crop and fishery production losses caused by Typhoon Glenda are evidence of how much it affected the agriculture industry.
Just recently, two super typhoons devastated the province. On 25 September 2022, Super Typhoon Karding (international name: Noru), which caused damage in Quezon province, cost PHP 186.5 million. The wrath of the extreme weather event resulted in the displacement of a total of 50,435 people, or 13,973 families, according to the Provincial Disaster Risk Reduction and Management Office (PDRRMO). The province’s first district, which includes the five island communities of Polillo, Burdeos, Panukulan, Jomalig, and Patnanungan, is home to at least 8619 families, or 31,701 people. After almost a month, on 29 October 2022, Typhoon Paeng cost the province a total of PHP 281,390,091.83 in damages to farming and fishing. It was estimated that about 23,902 families, or 82,385 people, were affected.
4.2. Test Instances
All necessary primary and secondary data were collected, analyzed, and summarized, including information from the interview with the Provincial Disaster Risk Reduction and Management Council’s head, staff, and employees (PDRRMC). Data on municipalities and barangays (small communities) were obtained. Each barangay is considered the network node, and each road connecting these barangays is the link. Since there is a total of 1242 barangays in Quezon Province, the network has 1242 nodes and 11,868 links. The island group (Panukulan, Burdeos, Patnanungan, Polillo, and Jomalig) is considered another network since there is no road connecting any barangay to other barangays in the nearby municipality.
The initial 1242 × 1242 matrix of transit times between all barangays was generated using Google Maps’ API matrix tool. A matrix entry denotes the travel time between the cluster centers of each pair of barangays in minutes.
The scenarios used in this investigation and their likelihood of occurring are displayed in
Table 3. The frequency and intensity of typhoons that have hit Quezon during the past 20 years are used to calculate the probability that each scenario would occur.
Based on the typhoon’s strength and the time it occurred, eight scenarios were considered in this study. Disasters in the evening typically result in more severe states than disasters that occur during the day since it is easier to move during the day than at night. In the Philippines, a typhoon’s intensity is defined by the typhoon signal.
Table 4 describes the meteorological condition and the response of DRRMC in each typhoon classification. As explained in the table, disaster preparedness agencies/organizations alert their communities during typhoon signal no. 2; hence signal no. 1 is not included in the scenarios.
4.3. Selection of Candidate Points
The risk categorization of the barangay serves as the qualifying criterion for selecting the candidate barangay to acquire the facility. It was developed using Project NOAH’s Risk Map (National Operational Assessment of Hazards). The red-colored barangays depict locations considered highly hazardous to landslides, floods, subsurface faults, and storm surges. These locations were assigned
M (a vast number) as the travel time, so these areas will not be selected as candidate locations for the facility. Only barangays classified as green or yellow were considered candidate barangays for a facility (see
Appendix A).
Among the 1242 barangays in Quezon, only 618 barangays became the possible locations for the facilities. The rest were considered highly susceptible to flood, landslide hazards, storm surge advisory level 4, and underground faults.
4.4. Computational Experiments
The MOPSO algorithm is used to determine the Pareto front of the model after its effectiveness has been demonstrated. Both the metaheuristics’ algorithm and the ε-constraint method are coded and implemented using Python 3.11.2. It runs on a desktop computer with CPU: 3.60 GHz, with an AMD Ryzen 5 3600 6-Core processor and 16 GB of installed RAM.
4.4.1. Comparison of MOPSO, MOSA, and ε-Constraint Method
The findings were contrasted with the results obtained using the MOSA and ε-constraint approach in order to confirm the proposed model and the effectiveness of the proposed algorithm. The first objective function is regarded as the major objective function and the second as the secondary objective function in the ε-constraint approach. For each problem, a total of sixteen (16) Pareto points are produced. The problems are resolved independently in order to establish the Pareto points depending on each objective function.
The Pareto boundaries for the MOPSO, MOSA, and ε-constraint methods are contrasted in
Figure 3. The graph clearly shows that the Pareto boundaries generated by the MOPSO algorithm are comparable to those generated by the MOSA and exact ε-constraint approach. Large-scale problems, however, are now inaccessible to the ε-constraint approach. Due to the need to take into account more facilities, Scenarios 5 to 8 no longer generate solutions. The outcome is similar to that of Ghasemi et al. [
17], who remarked that the ε-constraint approach is only capable of handling small-scale and medium-scale problems, whereas metaheuristics algorithms can solve even large-scale problems.
Table 5 presents further comparison and analysis. Columns 2 through 4 compare the Pareto fronts of the overall costs (
f1) for each of the three solution approaches, whereas columns 5 through 7 display the Pareto fronts of the travel times (
f2), and the number of vehicles (
f3) are shown in columns 8 through 10. The relative error is displayed in the subsequent columns after comparing the values of the e-constraint to those of MOPSO and MOSA, respectively.
The relative errors of MOPSO and MOSA for the three objective functions are −0.18824, −0.08363, 0.03555, −0.03831, 0.07123, and 0.14332, respectively. Therefore, MOPSO displays smaller relative error than MOSA for the second and third objective functions. MOPSO only performs not as good as that of MOSA in the first objective function.
Other metrics, such as the mean of ideal distance (MID), spacing metric (SM), diversification metric (DM), and algorithm running time (CPU T), which are presented in
Figure 4, are intended be used to compare the solutions of MOPSO with MOSA and ε-constraint. However, since Scenarios 5 through 8 no longer give solutions using the ε-constraint, only Scenarios 1 through 4 can be compared.
The graphs reflect the same investigation, showing that MOPSO performs satisfactorily across all metrics and is quite near to the exact solution approach. Thus, it is confirmed that MOPSO is a suitable approach for dealing with large-scale problems. It is crucial to take note of how long it takes to solve each complex problem. The epsilon-constraint technique is unable to keep up with the MOPSO as a result of the exact solution method’s drastically increasing time requirement as the problem’s size grows. The problem can be solved significantly faster using the metaheuristic approach. As a result, the MOPSO algorithm has excellent performance and is capable of handling complex problems.
4.4.2. Results of Case Study
Table 6 shows the minimum number of distribution centers, evacuation centers, and service vehicles needed to serve the needs of the homeless people if a disaster strikes in the province. As expected, the number of facilities increases, respectively, as the situation aggravates. Mainly, as the typhoon signal escalates, more people are being affected and need to be evacuated; hence, more facilities must be provided. However, the result shows that there is only a small effect on the number of facilities when a typhoon happens. Regardless of whether the typhoon occurs during the day or night, the facilities needed are almost the same.
It was also determined how many vehicles would be needed to shuttle affected individuals from the disaster zone to the safest evacuation centers. Because the algorithm always allows the vehicle to select the shortest path between the facilities, it has led to faster evacuation times and more trips, reducing the number of vehicles needed.
Table 6 also shows an interesting contrast that can be noted. Consideration is given to Scenario 0, which takes no likelihood into account. If the typhoon’s time and intensity are not considered in the model, the number of facilities will almost be doubled. It is notable that this is caused by evaluating the probability that a typhoon will hit the particular area at a given time in a particular scenario.
Table 7 summarizes the distribution of evacuees in the evacuation centers for each scenario. As discussed previously, as the typhoon intensifies (as defined by the scenarios), more people get affected. They need to be evacuated to be safe. More ECs need to be provided. The number of evacuees in each EC for each scenario must be maximized to 600 persons. Furthermore, ECs nos. 4, 5, 6, and 7 are the most utilized ECs since these areas are usually struck by a typhoon and are more populated than the other areas.
Finally,
Figure 5 illustrates the areas covered by each facility. For illustrative convenience, we only displayed the figure for Scenario 1. Scenario 1 resulted in having a minimum of seven evacuation centers (red square) and three distribution hubs (yellow triangle). As seen in the figure, the model consolidated almost entirely in the demand groups and distributed facilities consistently throughout the study region. The circles in
Figure 5 indicate the covered region of each facility. The yellow circles identifies the covered regions for the distribution centers. It minimizes the time in distributing the relief items to the evacuation centers and affected areas.
Table 8 shows the specific location of each facility.
These regions were also noted as being outside the Quezon hazard map areas designated particularly vulnerable to flooding, landslide risk, storm surge alert level 4, and subterranean faults. As a result, these areas are suitable for constructing DM facilities.
4.4.3. Sensitivity Analysis
A sensitivity analysis is carried out to determine how sensitive the infrastructure cost is to EC capacity. The capacity affects the number of ECs that must be built, as can be drawn from
Table 6. The capacity expansion of one EC prevents the creation of a new EC. Consequently, the construction’s fixed costs will decrease.
Figure 6 illustrates the relationship between the EC’s capacity and its construction cost. Generally, the highest cost appears in Scenario 8. It is more cost-effective to install ECs with higher capacity that will be spread out across the network. The establishment of fewer evacuation centers, however, might lengthen the evacuation process. However, the cost lines of all the scenarios converge somewhere in the middle, suggesting that the infrastructure costs are slightly different between scenarios at a given capacity.
Figure 7 shows the sensitivity analysis of the network’s overall travel time EC capacity. Because there will be fewer ECs dispersed throughout the network, as was already mentioned, the travel time increases as the number of ECs increase.
The number of the vehicle (objective function 3) is not particularly sensitive to EC capacity. As we increase EC capacity, the impact is relatively minimal. The reason for this is that, in other scenarios, idle time might still be employed to move the homeless people from the afflicted locations to the EC. As the EC’s capacity rises, the number of trips each vehicle can make effectively rises.
4.5. Practical Implications
Even though the idea of sustainability is not new, it has only lately been discovered how to apply it to humanitarian supply chains. Generally, the foundation of a sustainable system is a constant understanding that sustainability goals are being achieved. Building long-term capacity from a holistic standpoint is essential to enhancing response and the efficacy of humanitarian interventions. The development of long-term capacity is key to the effectiveness of temporary relief efforts. As a result, long-term capacity building is essential for creating sustainable humanitarian supply chains (HSCs). Sustainability has been a controversial issue and is the most crucial factor in the current situation.
As part of the long-term capacity building in the Philippines, this study helps by determining the number of distribution hubs and evacuation centers and their locations that optimize the total construction cost for the facilities and maximize the coverage of these facilities to adjacent residential zones. The model ensures that evacuees are evacuated within the required response time during the evacuation process.
5. Conclusions and Future Research
This paper proposed a stochastic multi-objective location-routing mathematical model for creating a humanitarian network for disaster response. The proposed model was applied to a case study in Quezon Province, which comprises 1242 barangays and is regularly hit by typhoons. This also considers the strategic and tactical strata of decision-making in crisis response. The selection of the quantity and location of ECs and DCs and the distribution of available capacity are referred to as strategic decisions. Operations considerations include choices regarding the number of vehicles to be used, the route to take, and the transfer of impacted individuals to ECs.
The proposed model had three objectives: minimizing the network’s infrastructure’s total cost, the amount of time spent traveling through it, and the number of vehicles. The Multi-objective Particle Swarm Optimization (MOPSO) technique was used to resolve the model. A sensitivity analysis was used to compare the suggested model’s efficiency to the EC’s capacity. The findings implied that constructing more ECs with less capacity is preferable when a typhoon becomes more severe. The province’s ECs are significantly dispersed throughout the network. On the other hand, less powerful storms call for the construction of fewer ECs with more capacity.
This study will aid policymakers and government officials in strategic and tactical decision-making before and after a disaster. Government decision-makers can address potential shortages and issues during the crisis as the optimum number of DC and EC, their location, and capacity are defined in advance. During typhoons, there is also a chance that roads could be destroyed or blocked. Therefore, it is advised that decision-makers strengthen the primary pathways. The strength of the routes leading to probable locations for ECs and DCs should also be considered, as well as the absence of barriers. It can significantly lower the possibility of a failed evacuation.
The following issues of interest can still be investigated in future work: (1) it is recommended to generate more accurate evacuation plans combined with the congestion of roads, since the road uncertainty covered in this study is only related to roads being blocked or damaged, while road traffic was not considered; (2) the evacuee arrival distribution can be taken into account to make the model more dynamic (i.e., the use of queuing analysis to make the probability distribution more accurate); (3) only one vehicle type was considered in the evacuation; it is a vital topic to extend the model to heterogeneous fleet cases; and lastly, (4) a cooperative game and simulation can be utilized to consider the behavior aspect of evacuees during evacuation.



 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}