
A Dynamic Scheduling Model for Underground Metal Mines under Equipment Failure Conditions


Abstract
:1. Introduction
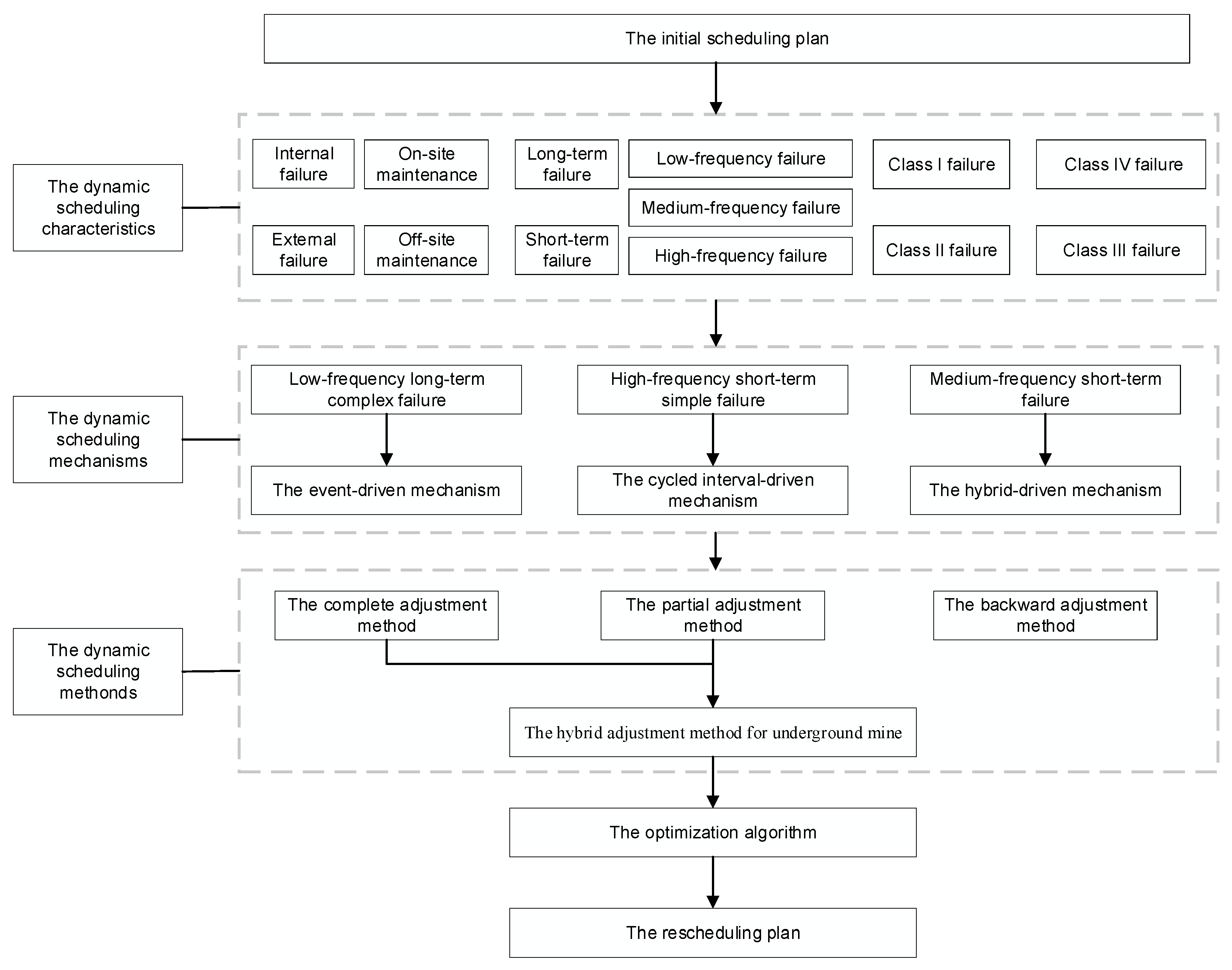
2. Dynamic Scheduling Process
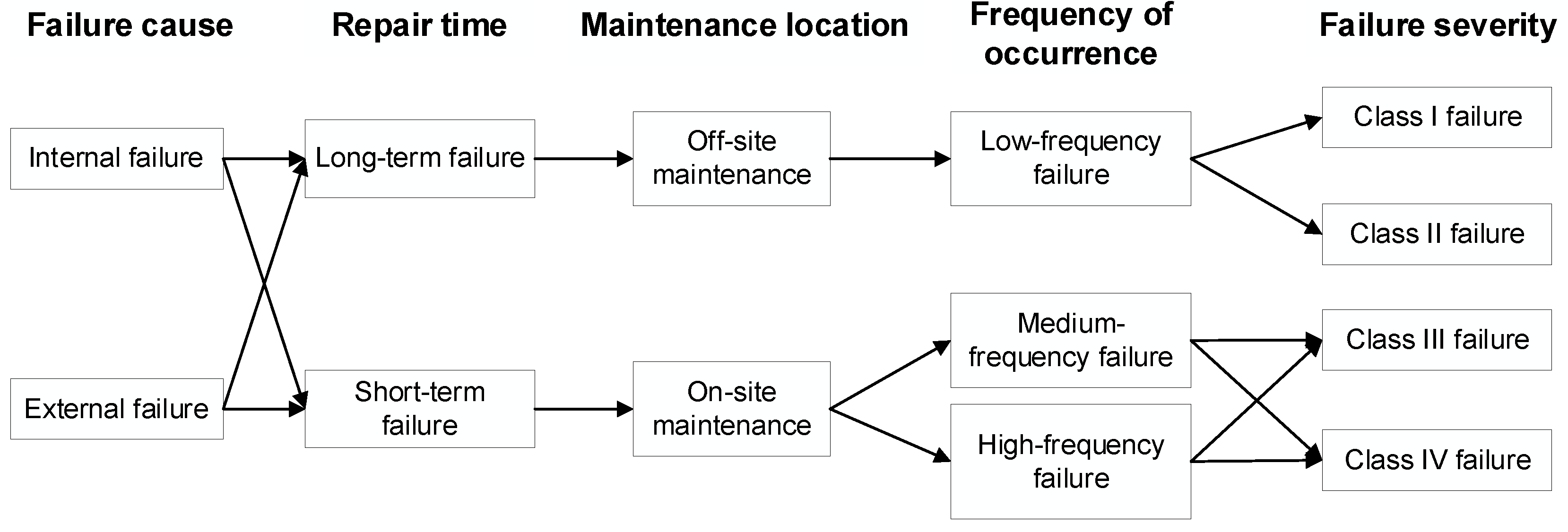
2.1. Dynamic Scheduling Characteristics
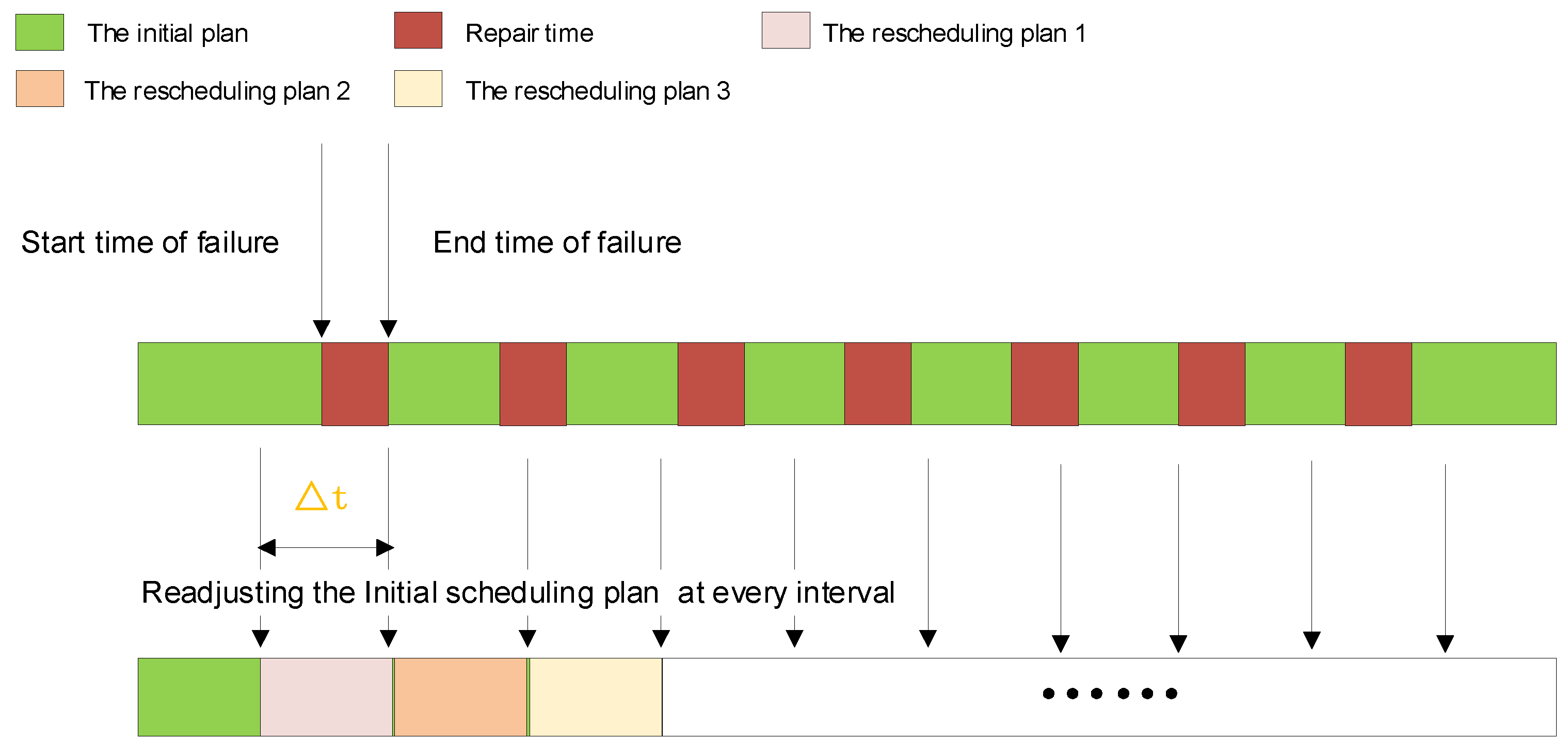
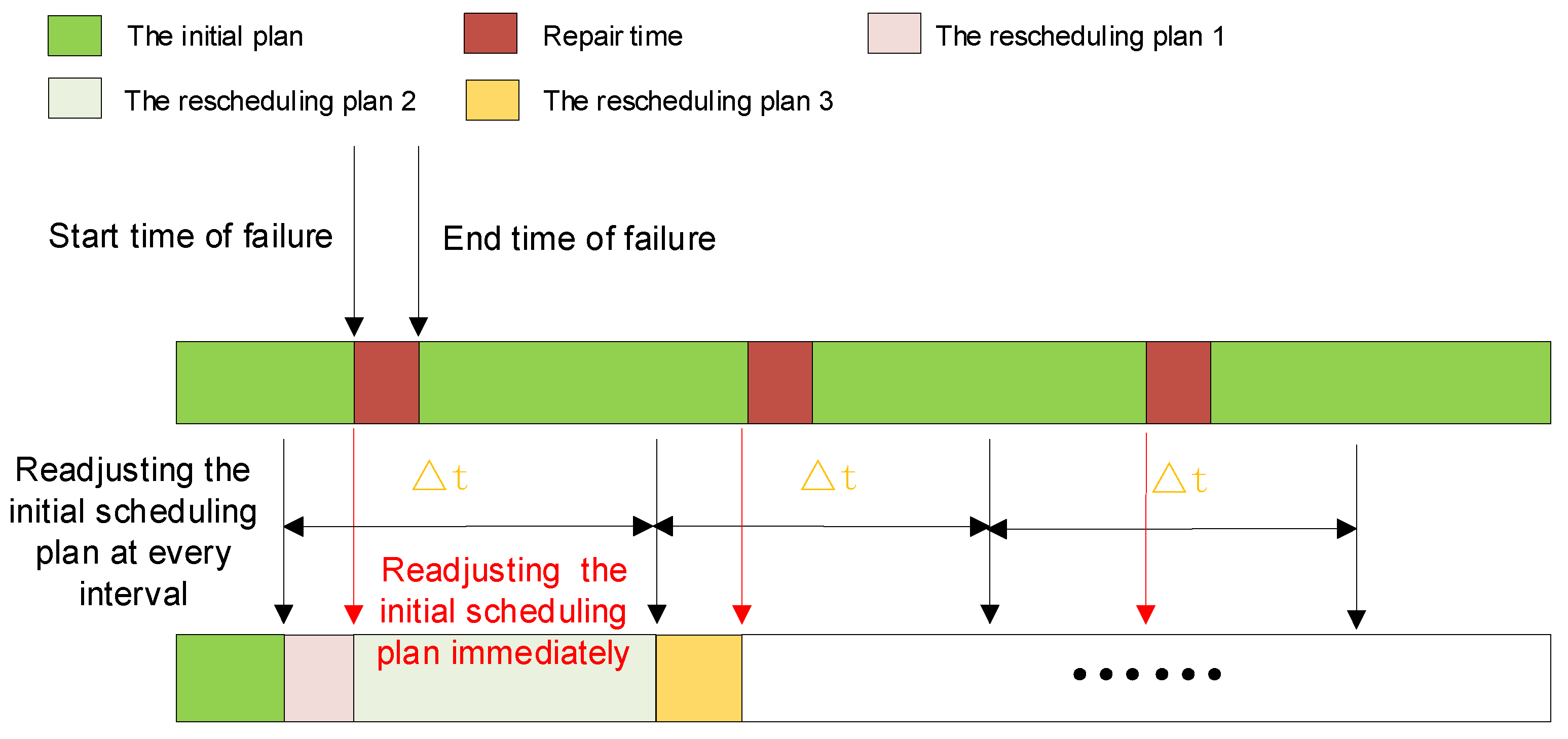
2.2. Dynamic Scheduling Mechanisms
2.3. Dynamic Scheduling Methods
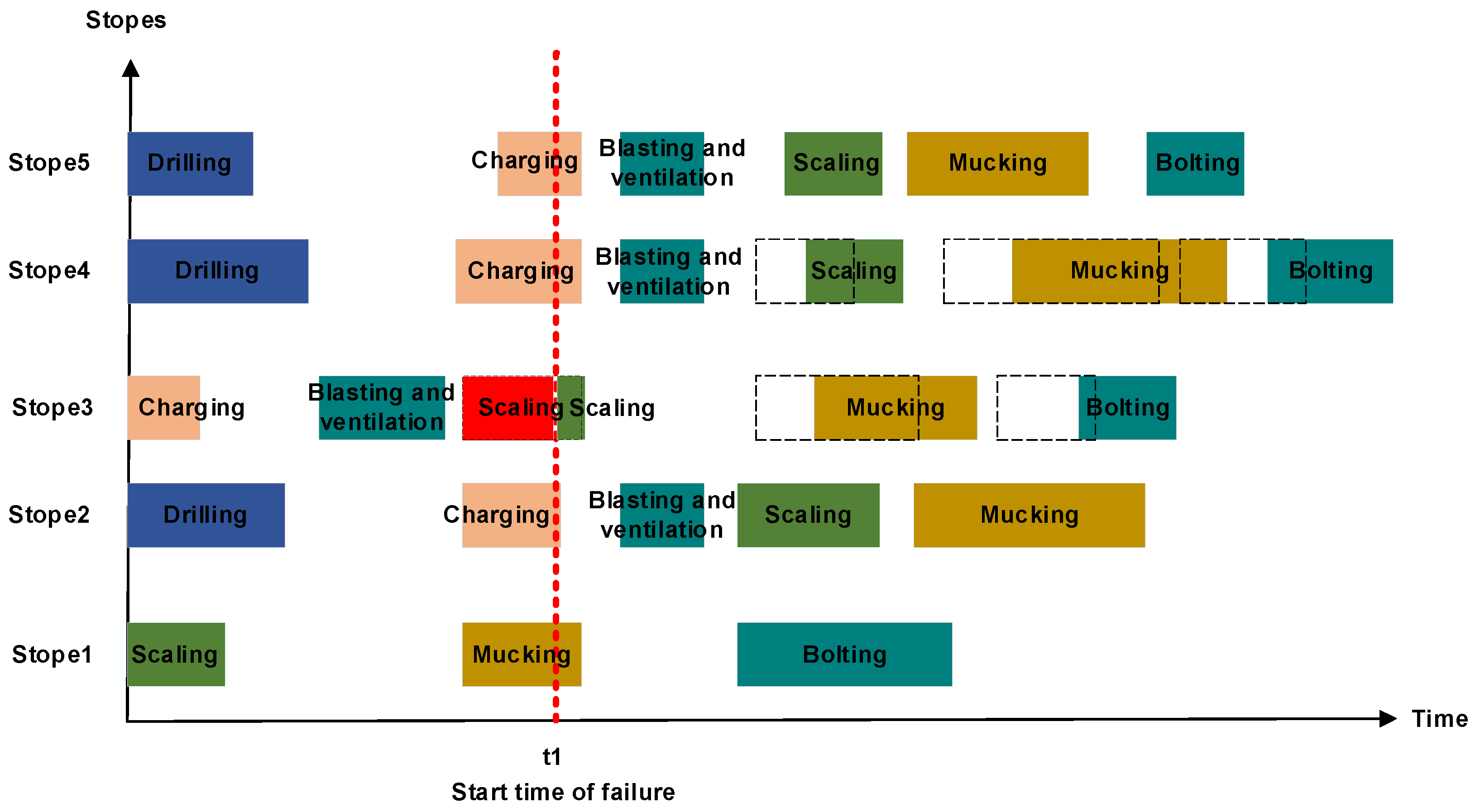
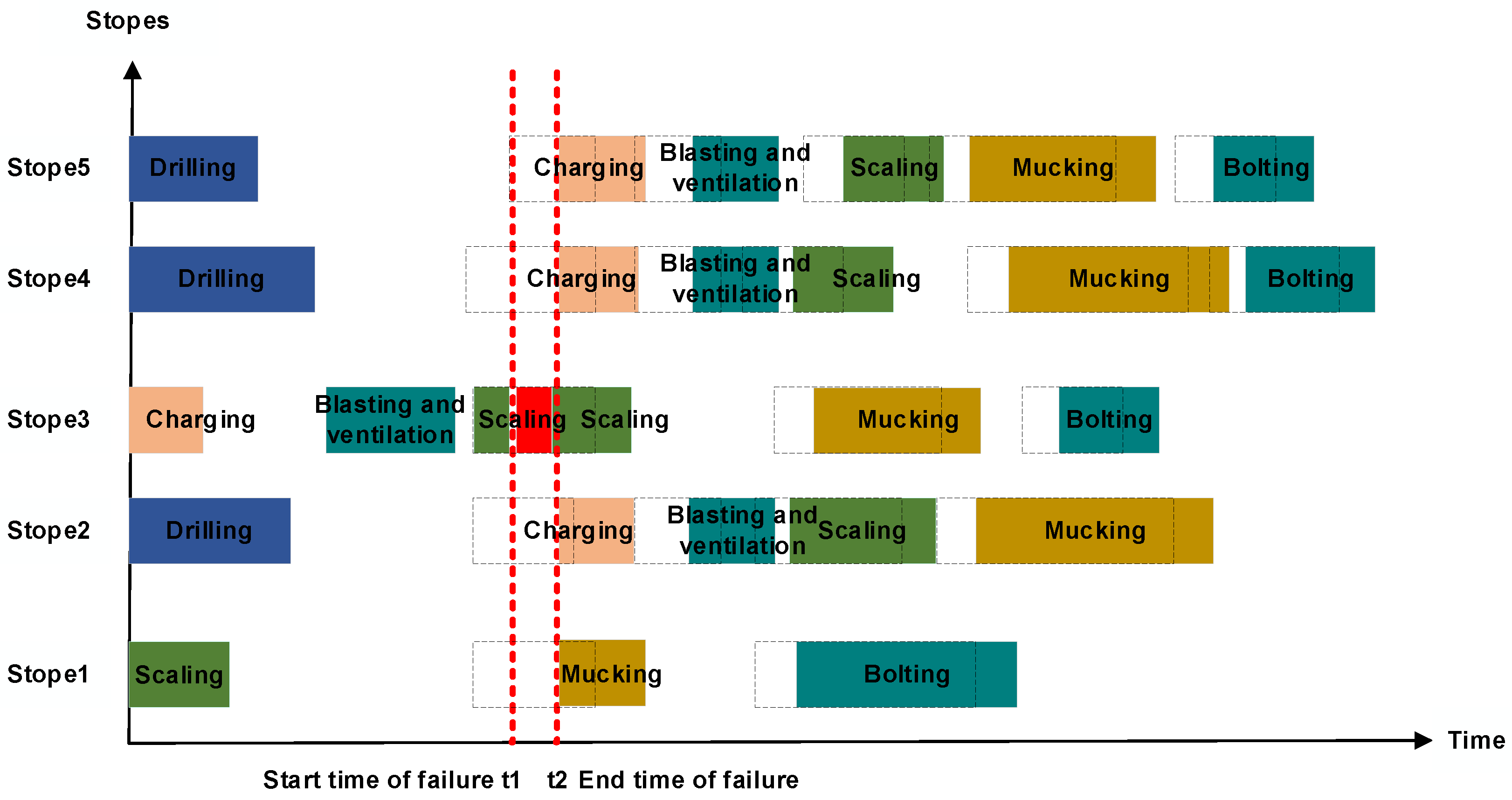
2.4. Process Reconfiguration
3. Dynamic Scheduling Modeling
3.1. Description of the Problem
3.2. Mathematical Model
3.2.1. Symbol Definition
3.2.2. Objective Function
3.2.3. Equivalence Relations
3.2.4. Constraints
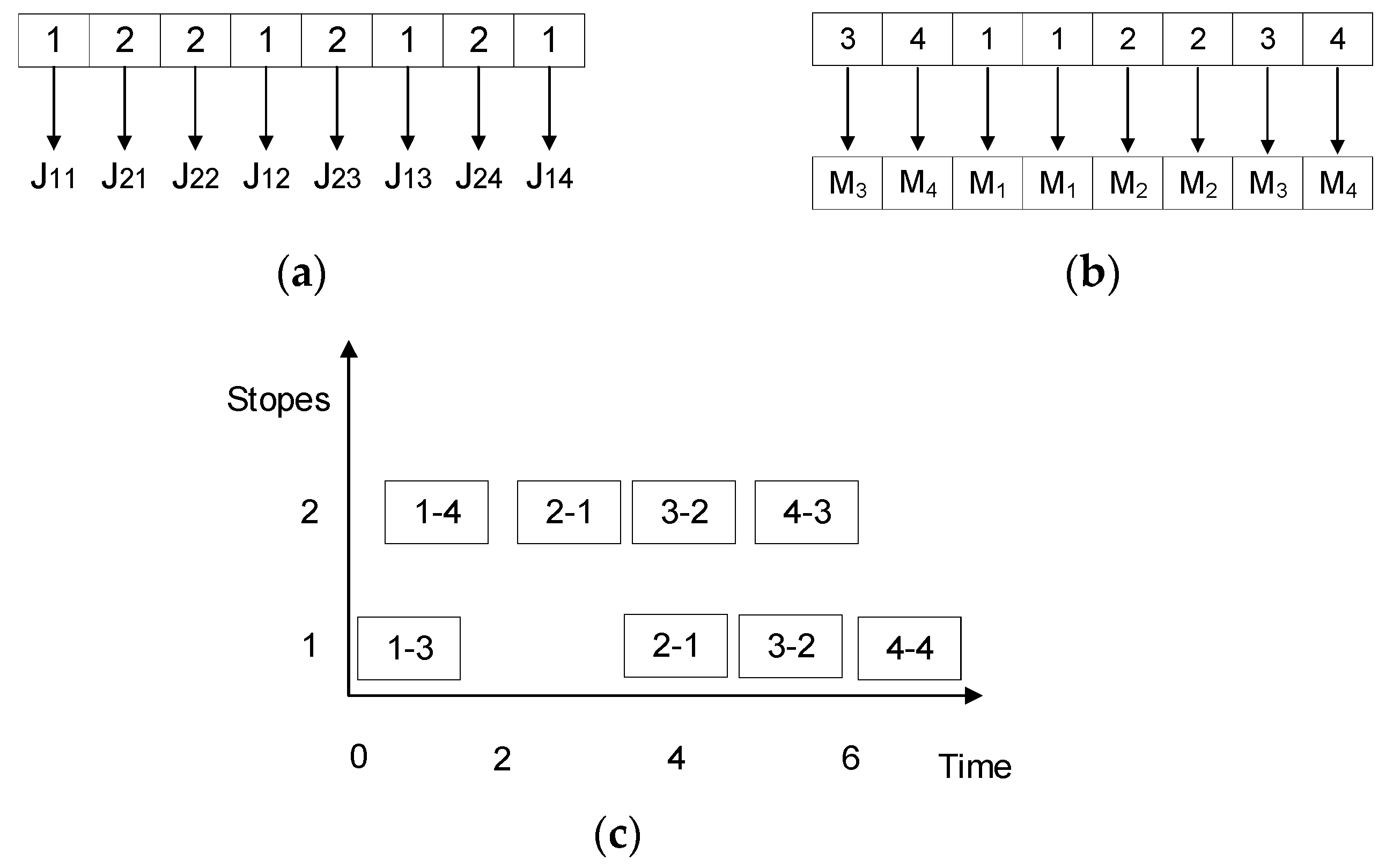
3.3. Model Solving
4. Case Study
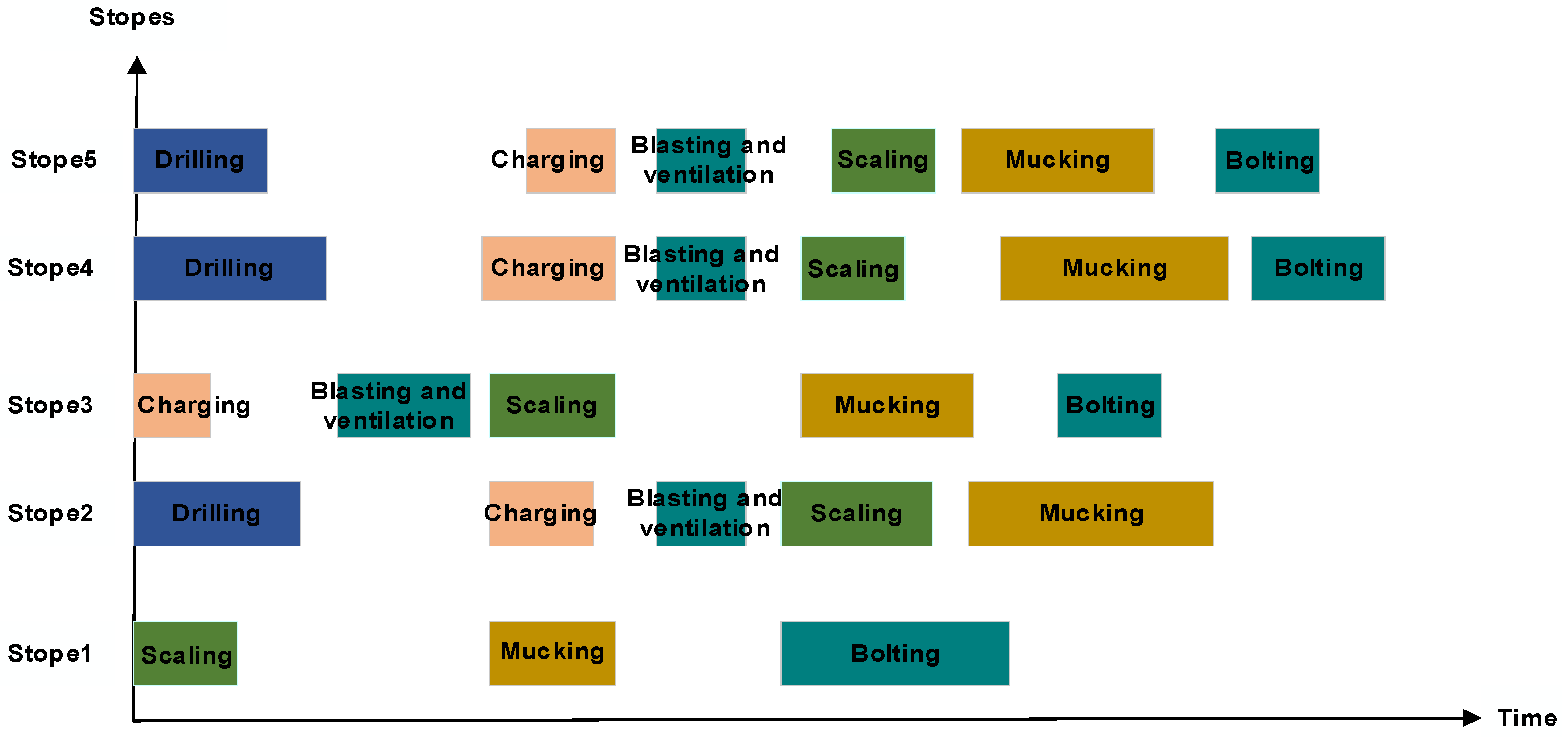
4.1. Initial Plan and Basic Data
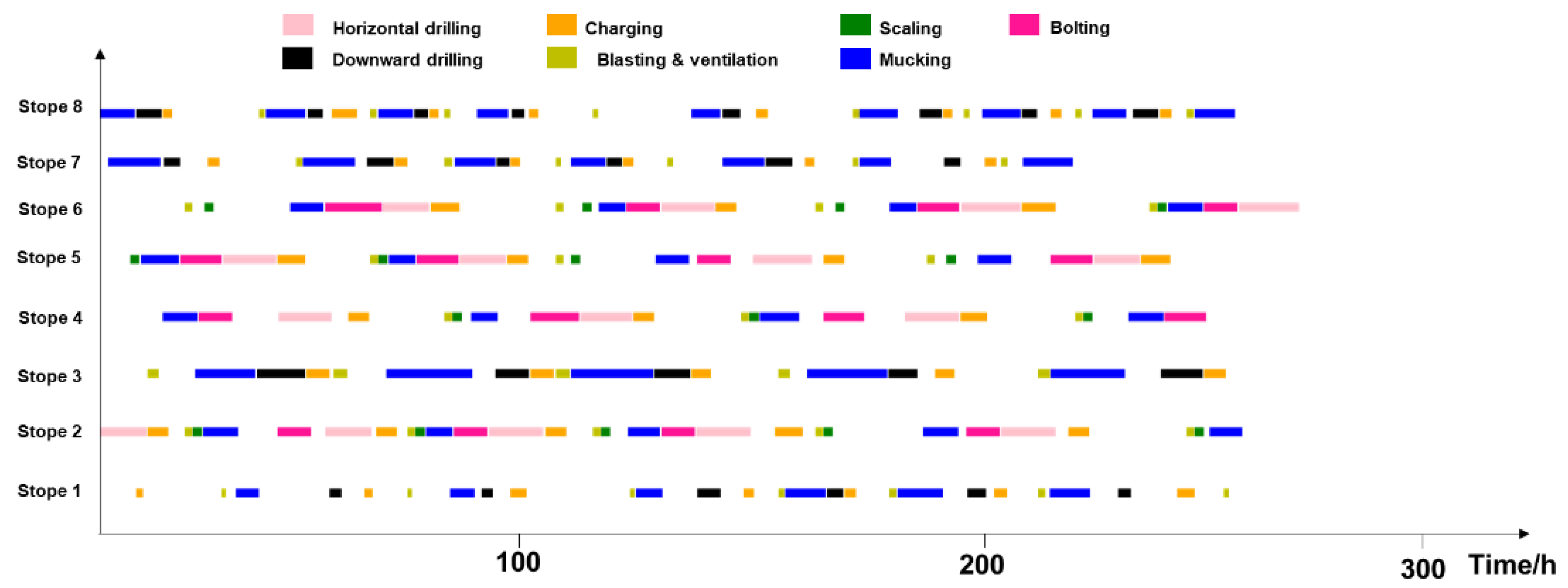
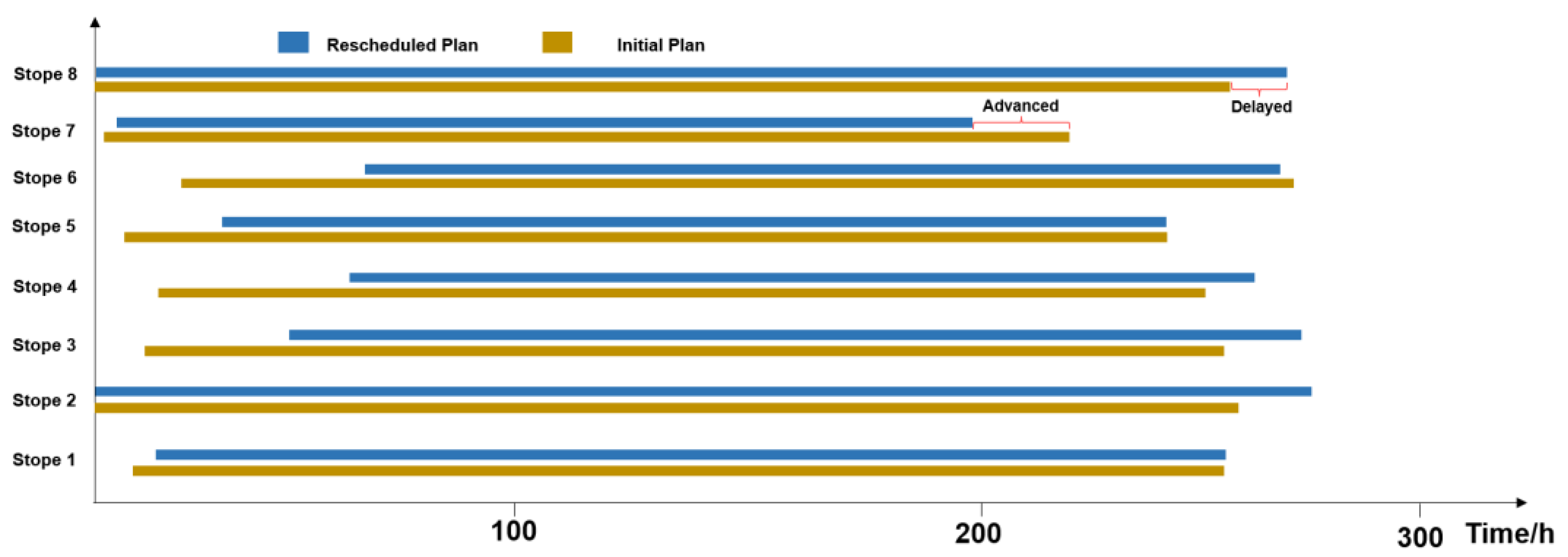
4.2. The Rescheduled Plan
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chimunhu, P.; Topal, E.; Ajak, A.D.; Asad, W. A Review of Machine Learning Applications for Underground Mine Planning and Scheduling. Resour. Policy 2022, 77, 102693. [Google Scholar] [CrossRef]
- Liu, S.Q.; Kozan, E.; Masoud, M.; Li, D.; Luo, K. Multi-Stage Mine Production Timetabling with Optimising the Sizes of Mining Operations: An Application of Parallel-Machine Flow Shop Scheduling with Lot Streaming. Ann. Oper. Res. 2022. [Google Scholar] [CrossRef]
- Bao, Y.; Wang, Y.; Zhao, L.; Zhang, A. Optimization Production Scheduling of Underground Backfilling Mining Based on NSGA-II. Min. Metall. Explor. 2022, 39, 1521–1536. [Google Scholar] [CrossRef]
- Seifi, C.; Schulze, M.; Zimmermann, J. A Two-Stage Solution Approach for a Shift Scheduling Problem with a Simultaneous Assignment of Machines and Workers. In Mining Goes Digital; CRC Press: London, UK, 2019; pp. 377–385. [Google Scholar]
- Campeau, L.-P.; Gamache, M.; Martinelli, R. Integrated Optimisation of Short- and Medium-Term Planning in Underground Mines. Int. J. Min. Reclam. Environ. 2022, 36, 235–253. [Google Scholar] [CrossRef]
- Schulze, M.; Rieck, J.; Seifi, C.; Zimmermann, J. Machine Scheduling in Underground Mining: An Application in the Potash Industry. OR Spectr. 2016, 38, 365–403. [Google Scholar] [CrossRef]
- Wang, H.; Tenorio, V.; Li, G.; Hou, J.; Hu, N. Optimization of Trackless Equipment Scheduling in Underground Mines Using Genetic Algorithms. Min. Metall. Explor. 2020, 37, 1531–1544. [Google Scholar] [CrossRef]
- Lindh, E.; Olsson, K. Scheduling of an Underground Mine by Combining Logic-Based Benders Decomposition and a Constructive Heuristic; Department of Mathematics, Linköping University: Linköping, Sweden, 2021. [Google Scholar]
- Galvin, J. Critical Role of Risk Management in Ground Engineering and Opportunities for Improvement. Int. J. Min. Sci. Technol. 2017, 27, 725–731. [Google Scholar] [CrossRef]
- Gul, M.; Ak, M.F.; Guneri, A.F. Pythagorean Fuzzy VIKOR-Based Approach for Safety Risk Assessment in Mine Industry. J. Saf. Res. 2019, 69, 135–153. [Google Scholar] [CrossRef]
- Jakkula, B.; Mandela, G.R.; Murthy, C.S.N. Reliability Block Diagram (RBD) and Fault Tree Analysis (FTA) Approaches for Estimation of System Reliability and Availability—A Case Study. Int. J. Qual. Reliab. Manag. 2020, 38, 682–703. [Google Scholar] [CrossRef]
- Odeyar, P.; Apel, D.B.; Hall, R.; Zon, B.; Skrzypkowski, K. A Review of Reliability and Fault Analysis Methods for Heavy Equipment and Their Components Used in Mining. Energies 2022, 15, 6263. [Google Scholar] [CrossRef]
- Framinan, J.M.; Fernandez-Viagas, V.; Perez-Gonzalez, P. Using Real-Time Information to Reschedule Jobs in a Flowshop with Variable Processing Times. Comput. Ind. Eng. 2019, 129, 113–125. [Google Scholar] [CrossRef]
- Song, Z.; Schunnesson, H.; Rinne, M.; Sturgul, J. Intelligent Scheduling for Underground Mobile Mining Equipment. PLoS ONE 2015, 10, e0131003. [Google Scholar] [CrossRef] [PubMed]
- Hou, J.; Li, G.; Wang, H.; Hu, N. Genetic Algorithm to Simultaneously Optimise Stope Sequencing and Equipment Dispatching in Underground Short-Term Mine Planning under Time Uncertainty. Int. J. Min. Reclam. Environ. 2020, 34, 307–325. [Google Scholar] [CrossRef]
- Hammami, N.E.H.; Jaoua, A.; Layeb, S.B. Equipment Dispatching Problem for Underground Mine Under Stochastic Working Times. In Computational Logistics; Mes, M., Lalla-Ruiz, E., Voß, S., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2021; Volume 13004, pp. 429–441. [Google Scholar]
- Åstrand, M.; Johansson, M.; Zanarini, A. Fleet Scheduling in Underground Mines Using Constraint Programming. In Integration of Constraint Programming, Artificial Intelligence, and Operations Research; van Hoeve, W.-J., Ed.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2018; Volume 10848, pp. 605–613. [Google Scholar]
- Åstrand, M.; Johansson, M.; Zanarini, A. Underground Mine Scheduling of Mobile Machines Using Constraint Programming and Large Neighborhood Search. Comput. Oper. Res. 2020, 123, 105036. [Google Scholar] [CrossRef]
- Åstrand, M.; Johansson, M.; Feyzmahdavian, H.R. Short-Term Scheduling of Production Fleets in Underground Mines Using CP-Based LNS. In Integration of Constraint Programming, Artificial Intelligence, and Operations Research; Stuckey, P.J., Ed.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2021; Volume 12735, pp. 365–382. [Google Scholar]
- Li, N.; Feng, S.; Lei, T.; Ye, H.; Wang, Q.; Wang, L.; Jia, M. Rescheduling Plan Optimization of Underground Mine Haulage Equipment Based on Random Breakdown Simulation. Sustainability 2022, 14, 3448. [Google Scholar] [CrossRef]
- Li, J.; Pan, Q.; Mao, K. A Discrete Teaching-Learning-Based Optimisation Algorithm for Realistic Flowshop Rescheduling Problems. Eng. Appl. Artif. Intell. 2015, 37, 279–292. [Google Scholar] [CrossRef]
- Peng, K.; Pan, Q.-K.; Gao, L.; Li, X.; Das, S.; Zhang, B. A Multi-Start Variable Neighbourhood Descent Algorithm for Hybrid Flowshop Rescheduling. Swarm Evol. Comput. 2019, 45, 92–112. [Google Scholar] [CrossRef]
- Ma, Z.; Yang, Z.; Liu, S.; Wu, S. Optimized Rescheduling of Multiple Production Lines for Flowshop Production of Reinforced Precast Concrete Components. Autom. Constr. 2018, 95, 86–97. [Google Scholar] [CrossRef]
- Tu, S.; Jia, M.; Wang, L.; Feng, S.; Huang, S. A Multi-Equipment Task Assignment Model for the Horizontal Stripe Pre-Cut Mining Method. Sustainability 2022, 14, 16379. [Google Scholar] [CrossRef]
- Zhang, B.; Pan, Q.; Meng, L.; Zhang, X.; Jiang, X. A Decomposition-Based Multi-Objective Evolutionary Algorithm for Hybrid Flowshop Rescheduling Problem with Consistent Sublots. Int. J. Prod. Res. 2023, 61, 1013–1038. [Google Scholar] [CrossRef]
- Chen, C.; Li, Y.; Cao, G.; Zhang, J. Research on Dynamic Scheduling Model of Plant Protection UAV Based on Levy Simulated Annealing Algorithm. Sustainability 2023, 15, 1772. [Google Scholar] [CrossRef]
- An, Y.; Chen, X.; Gao, K.; Zhang, L.; Li, Y.; Zhao, Z. A Hybrid Multi-Objective Evolutionary Algorithm for Solving an Adaptive Flexible Job-Shop Rescheduling Problem with Real-Time Order Acceptance and Condition-Based Preventive Maintenance. Expert Syst. Appl. 2023, 212, 118711. [Google Scholar] [CrossRef]
- Wen, X.; Lian, X.; Qian, Y.; Zhang, Y.; Wang, H.; Li, H. Dynamic Scheduling Method for Integrated Process Planning and Scheduling Problem with Machine Fault. Robot. Comput.-Integr. Manuf. 2022, 77, 102334. [Google Scholar] [CrossRef]
- Gu, Z.-M.; Wang, G.-G. Improving NSGA-III Algorithms with Information Feedback Models for Large-Scale Many-Objective Optimization. Future Gener. Comput. Syst. 2020, 107, 49–69. [Google Scholar] [CrossRef]
- Li, S.; Zhang, M.; Wang, N.; Cao, R.; Zhang, Z.; Ji, Y.; Li, H.; Wang, H. Intelligent Scheduling Method for Multi-Machine Cooperative Operation Based on NSGA-III and Improved Ant Colony Algorithm. Comput. Electron. Agric. 2023, 204, 107532. [Google Scholar] [CrossRef]
- Hou, Y.; Wu, N.; Li, Z.; Zhang, Y.; Qu, T.; Zhu, Q. Many-Objective Optimization for Scheduling of Crude Oil Operations Based on NSGA-III with Consideration of Energy Efficiency. Swarm Evol. Comput. 2020, 57, 100714. [Google Scholar] [CrossRef]
- Liu, Y.; You, K.; Jiang, Y.; Wu, Z.; Liu, Z.; Peng, G.; Zhou, C. Multi-Objective Optimal Scheduling of Automated Construction Equipment Using Non-Dominated Sorting Genetic Algorithm (NSGA-III). Autom. Constr. 2022, 143, 104587. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | Failure Reason | Failure Type |
|---|---|---|
| Drilling rig | The components of the drilling rig have not been maintained or replaced for a long time. | Internal failure |
| Drill pipe damage caused by drilling hard rock or the abnormal operation of a drilling rig caused by a high-temperature and high-humidity environment. | External failure | |
| Charging rig | The charging quality of the charging rig is not up to the standard due to an unstable and insufficient charging quantity that cannot meet the requirements of subsequent blasting operations. | Internal failure |
| The charging rig cannot work normally due to the deformation of the borehole, or the charging operation is abnormal due to the high-temperature and high-humidity environment. | External failure | |
| Scaling rig | The components of the scaling rig have not been maintained or replaced for a long time. | Internal failure |
| The falling pumice caused damage to the mechanical arm of the scaling rig. | External failure | |
| LHD | The components of the LHD have not been maintained or replaced for a long time. | Internal failure |
| The high-temperature and high-humidity environment led to the abnormal loading operation of the LHD. | External failure | |
| Bolter | The components have not been maintained or replaced for a long time, the anchor rod is broken, the air leg is jammed, and the positioning is inaccurate, resulting in abnormal support operation. | Internal failure |
| The high-temperature and high-humidity environment led to abnormal support operation. | External failure |
| Dynamic Scheduling Mechanism | Advantages | Disadvantages |
|---|---|---|
| Event-driven | Responds to events quickly; High real-time performance. | Poor in scheduling stability. |
| Cycled, interval-driven | High stability. | Poor in real-time scheduling. |
| Hybrid-driven | Responds to events quickly; High stability. | Complex in management |
| Dynamic Scheduling Methods | Advantages | Disadvantages |
|---|---|---|
| Complete adjustment | High robustness; High flexibility; High completion time stability. | High equipment change cost. |
| Partial adjustment | Low equipment change cost; High equipment stability. | Low robustness. |
| Backward adjustment | High equipment stability. | Low robustness; Low flexibility; Low time stability. |
| Name | Meaning |
|---|---|
| A | Set of areas, A = {A1, A2…, Ai}, |
| Bi | Set of stripes, Bi = {Bi1, Bi2, …, Bik}, |
| Cik | Set of all blocks, Cik = {Cik1, Cik2, …, Cikn}, |
| M | Set of equipment, M = {M1, M2, …, Mh}, , |
| J | Set of processes, J = {J1, J2, …, Jm}, , J1 = 1 (Drilling), J2 = 2 (Charging), J3 = 3 (Blasting and ventilation), J4 = 4 (Scaling), J5 = 5 (Mucking), J6 = 6 (Bolting) |
| Name | Meaning |
|---|---|
| TFiknmh | In the initial plan, the starting time of Mh failure of Jm in Cikn, h, |
| TEiknmh | In the initial plan, the ending time of Mh of Jm in Cikn, h, |
| TEifxmu | In the initial plan, the ending time of Mu of Jm in Cifx, h, |
| TSiknmu | In the rescheduled plan, the starting time of Mu of Jm in Cikn, h, |
| TWiknmu | In the rescheduled plan, the operation time of Mu of Jm in Cikn, h, |
| TEiknmu | In the rescheduled plan, the ending time of Mu of Jm in Cikn, h, |
| If the equipment selection of Jm in Cikn changes, the value is 1; otherwise, it is 0, | |
| Blasting and ventilation time in Cikn | |
| Time of movement between Cifx and Cikn with Mu, h | |
| Number of blasting and ventilation process for Jm in Cikn, |
| Equipment | Task | Operational Efficiency | Number |
|---|---|---|---|
| Horizontal drilling rig | Drilling horizontal holes | 40 m/h | 4 |
| Downward drilling rig | Drilling vertical holes | 30 m/h | 2 |
| Charging rig | Drilling holes for charging with explosives | 90 m/h | 3 |
| Scaling rig | Exposed roof area scaling for removing loosely attached rock | 10 m2/h | 1 |
| LHD | Ore mucking | 1500 t·m/h | 4 |
| Bolter | Anchor support for reinforcing surrounding rock mass | 10 anchors/h | 3 |
| Name | The Initial Plan | The Execution Result of the Initial Plan | The Execution Result of the Rescheduled Plan | Improvement (%) |
|---|---|---|---|---|
| Completion time (h) | 255 | 312 | 284 | 8.97 |
| The total time deviation (h) | 0 | 183 | 79 | 56.83 |
| The frequency of equipment changes | 0 | 0 | 11 | — — |
| Total block interval (h) | 337 | 647 | 420 | 35.09 |
| Total process interval (h) | 638 | 943 | 691 | 26.72 |
| Ore grade fluctuation | 0.04 | 0.83 | 0.42 | 49.40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, S.; Jia, M.; Wang, L.; Feng, S.; Huang, S. A Dynamic Scheduling Model for Underground Metal Mines under Equipment Failure Conditions. Sustainability 2023, 15, 7306. https://doi.org/10.3390/su15097306
Tu S, Jia M, Wang L, Feng S, Huang S. A Dynamic Scheduling Model for Underground Metal Mines under Equipment Failure Conditions. Sustainability. 2023; 15(9):7306. https://doi.org/10.3390/su15097306
Chicago/Turabian StyleTu, Siyu, Mingtao Jia, Liguan Wang, Shuzhao Feng, and Shuang Huang. 2023. "A Dynamic Scheduling Model for Underground Metal Mines under Equipment Failure Conditions" Sustainability 15, no. 9: 7306. https://doi.org/10.3390/su15097306