
Design and Control of Two-Stage DC-AC Solid-State Transformer for Remote Area and Microgrid Applications
 ,
,  and
and 
Abstract
:1. Introduction
- Management of bi-directional power flow.
- Mitigate harmonics and transients.
- Good voltage-regulating capabilities.
- Facilitate direct integration of distributed renewable energy resources and distributed energy storage devices.
- Power quality control.
- A detailed performance of double-stage DC-DC and DC/three-phase AC converters is provided.
- Circuit analysis and operation of the converters, optimization of a medium-frequency transformer, passive component design, and controller modeling of converters for each stage are considered.
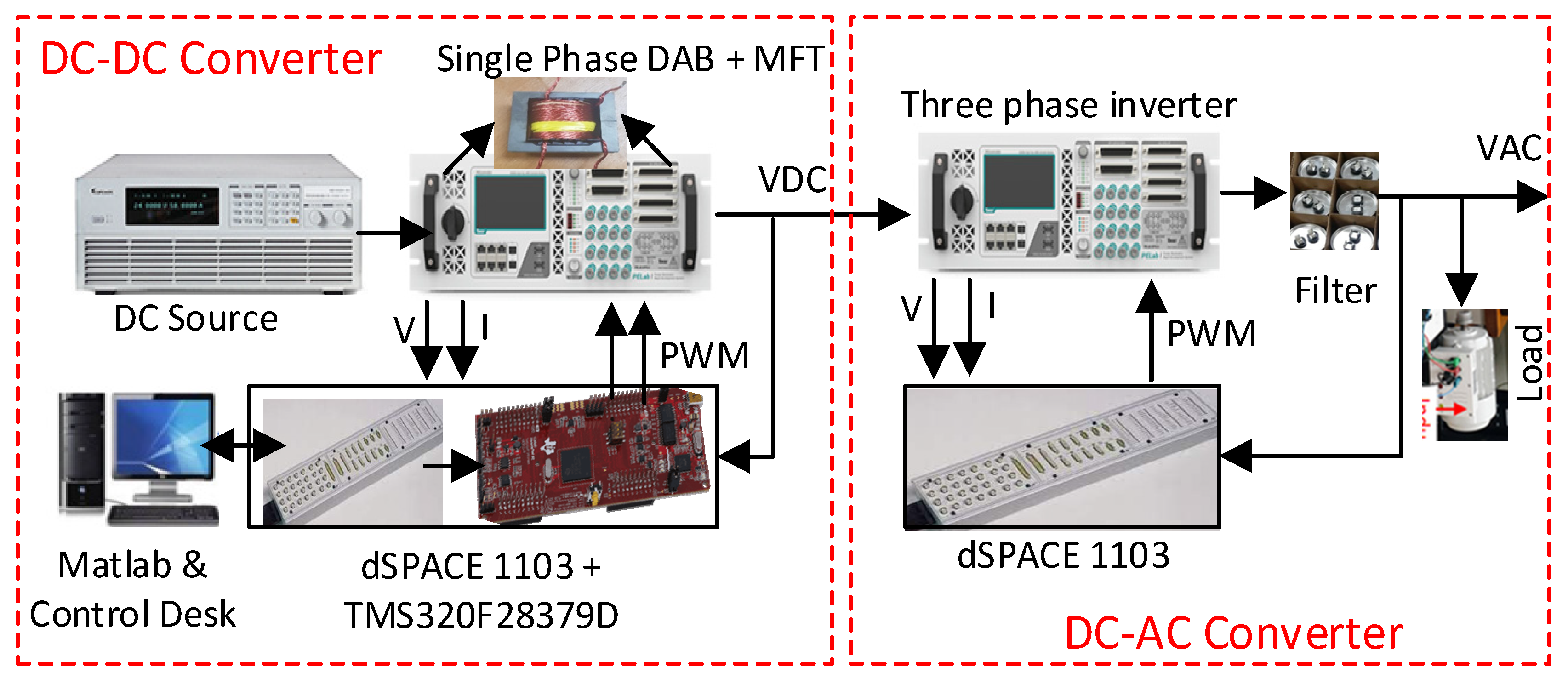
- Experimental setup (medium-voltage prototype) of the proposed two-stage SST was developed for testing and validation of the simulated control techniques.
- Performance under load variation, input voltage variation, and reference voltage tracking is evaluated.
- Detailed and multidimensional design of an SST considering the high-frequency transformer optimization, power converter design, and developing a controller for different SST stages.
- Comprehensive presentation of high-power and high-voltage double-stage converter with experimental results, which is not widely addressed in literature.
- Both simulation and experimental performance are provided.
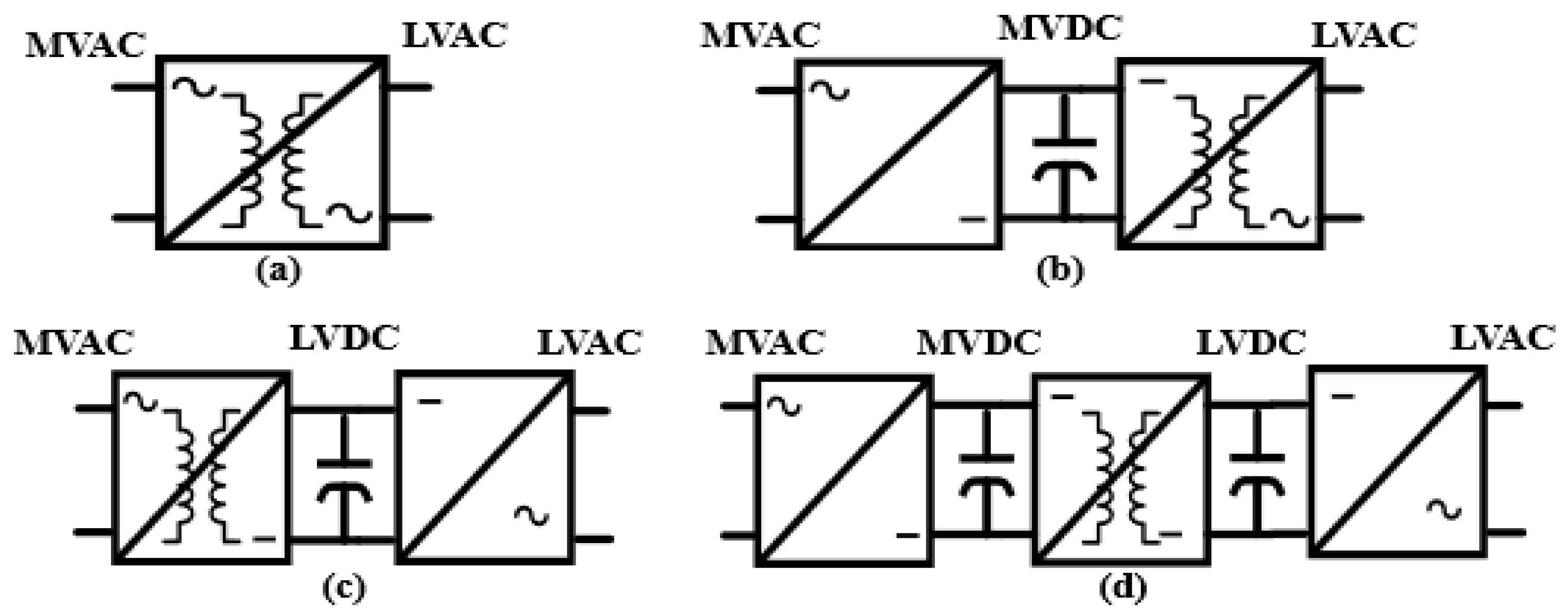
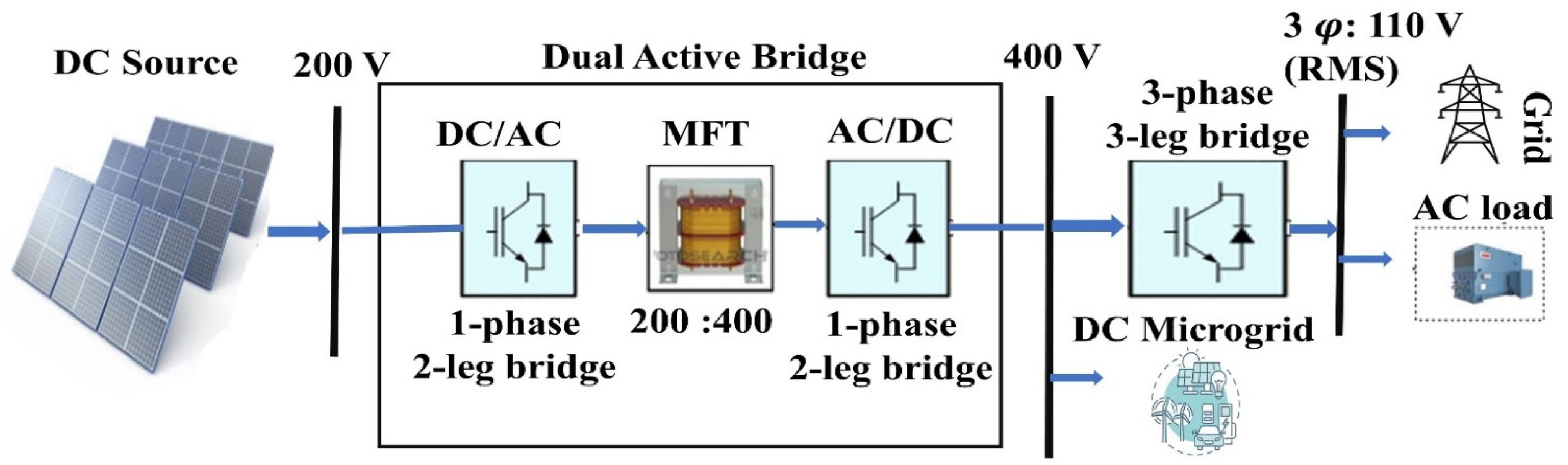
2. Proposed Two-Stage DC-AC SST
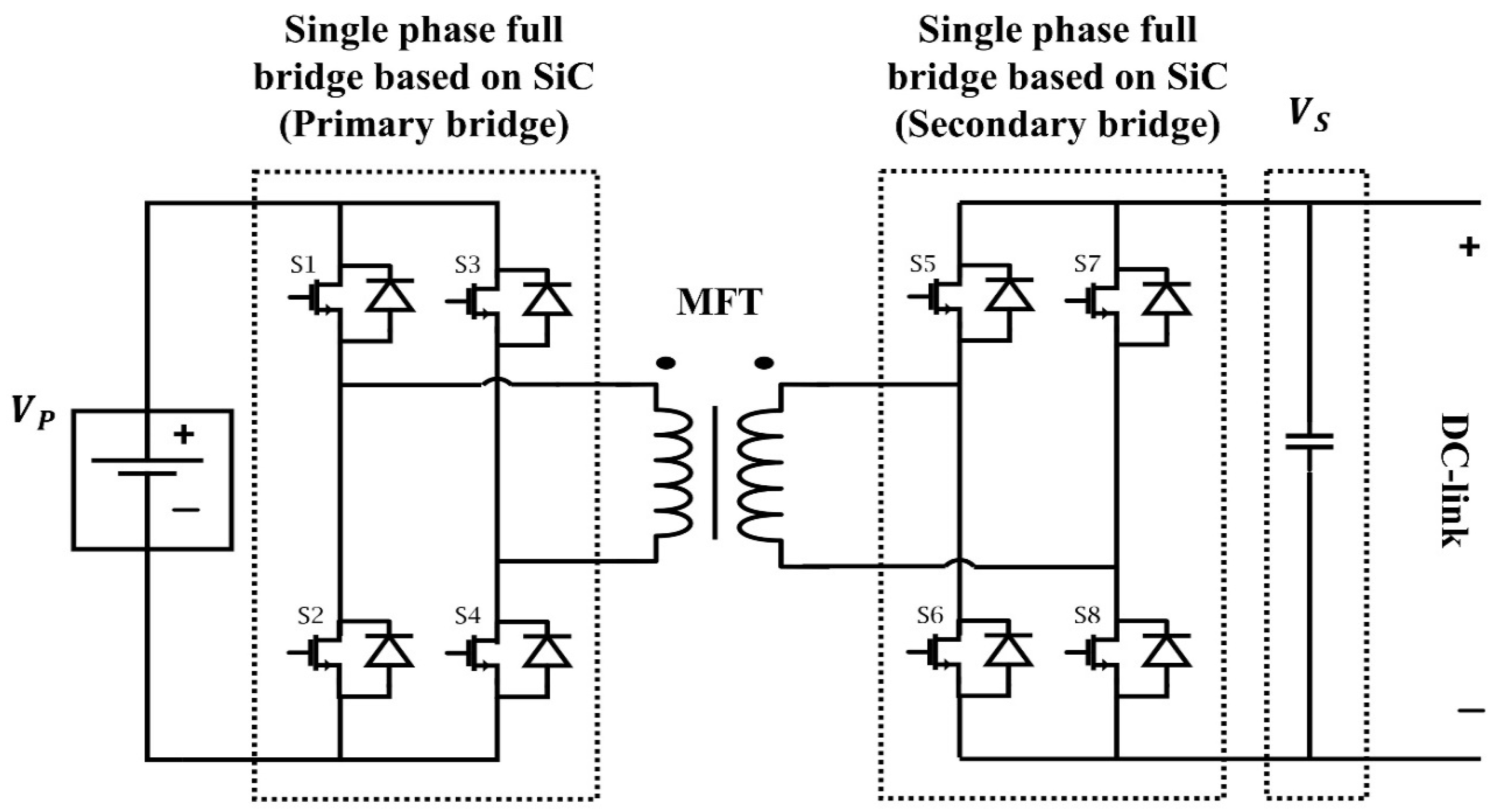
2.1. Dual Active Bridge DC-DC Stage Design
2.1.1. Operation of DAB
2.1.2. Transformer Turns Ratio
2.1.3. DC Link Capacitor Design
2.1.4. Controller Design
2.2. MFT Design
2.3. Three-Phase Inverter DC-AC Stage Design
2.3.1. LC Filter Design
2.3.2. Controller Design
3. Simulation Results
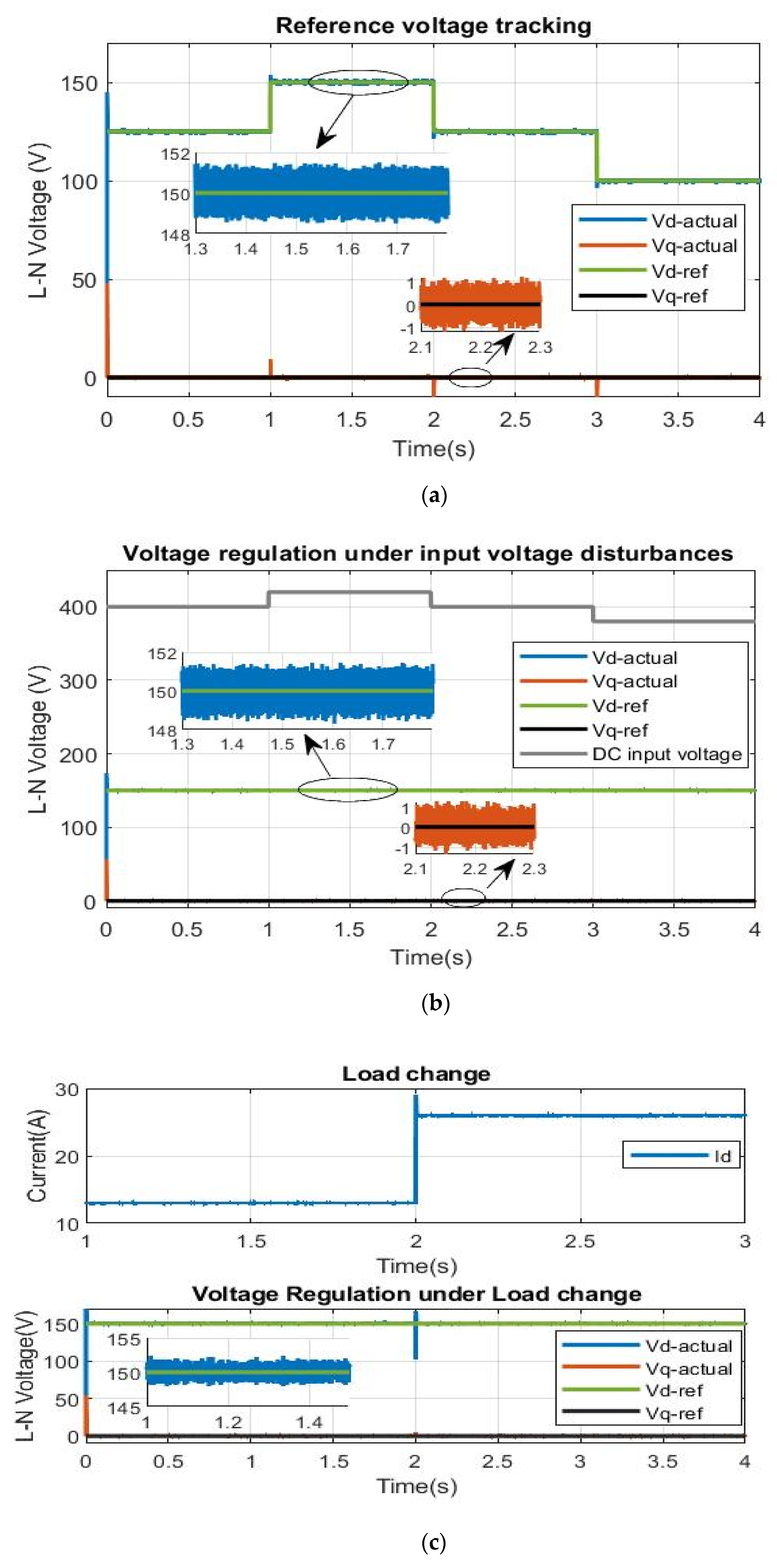
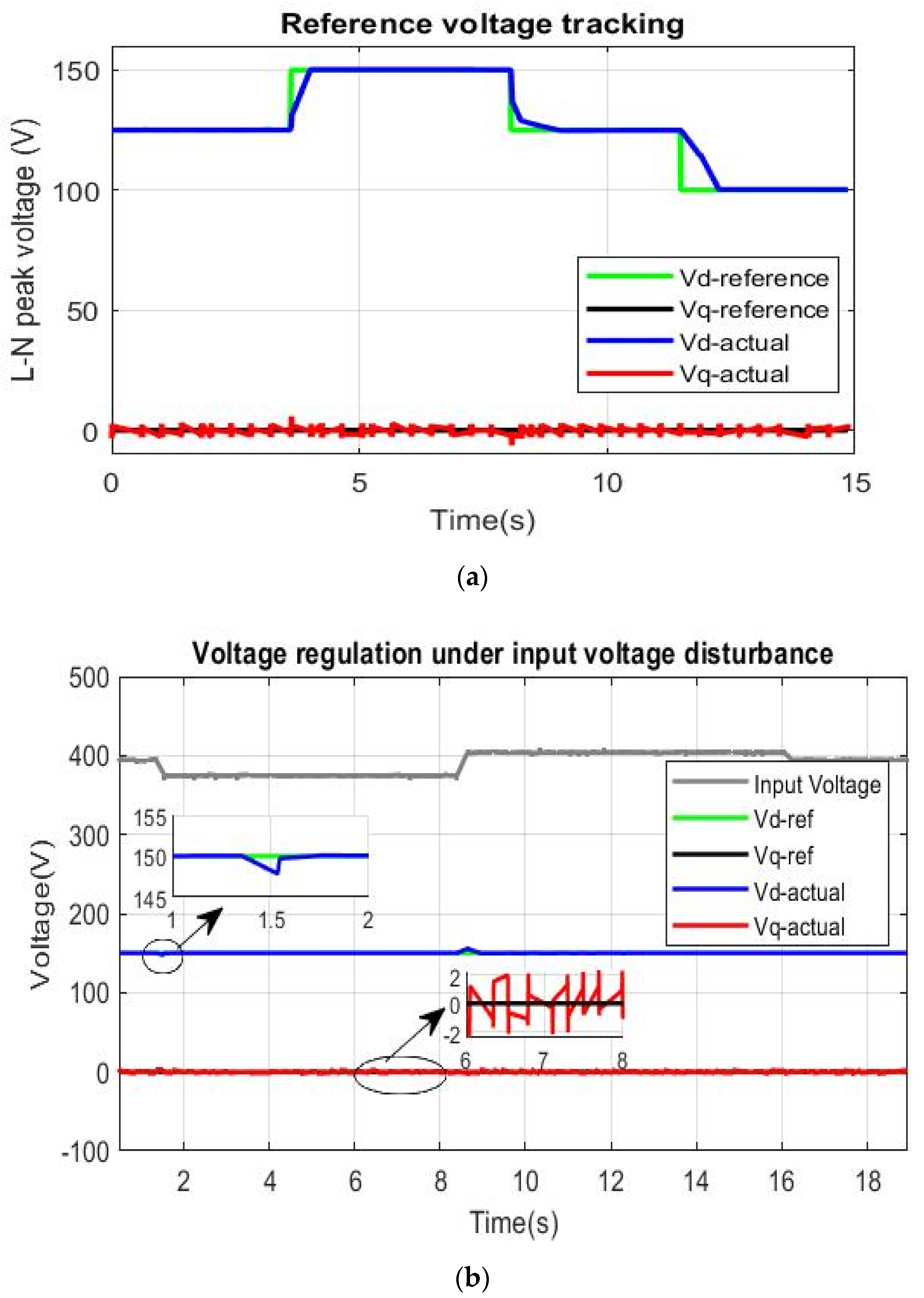
- Voltage reference tracking.
- Voltage regulation under input voltage disturbances.
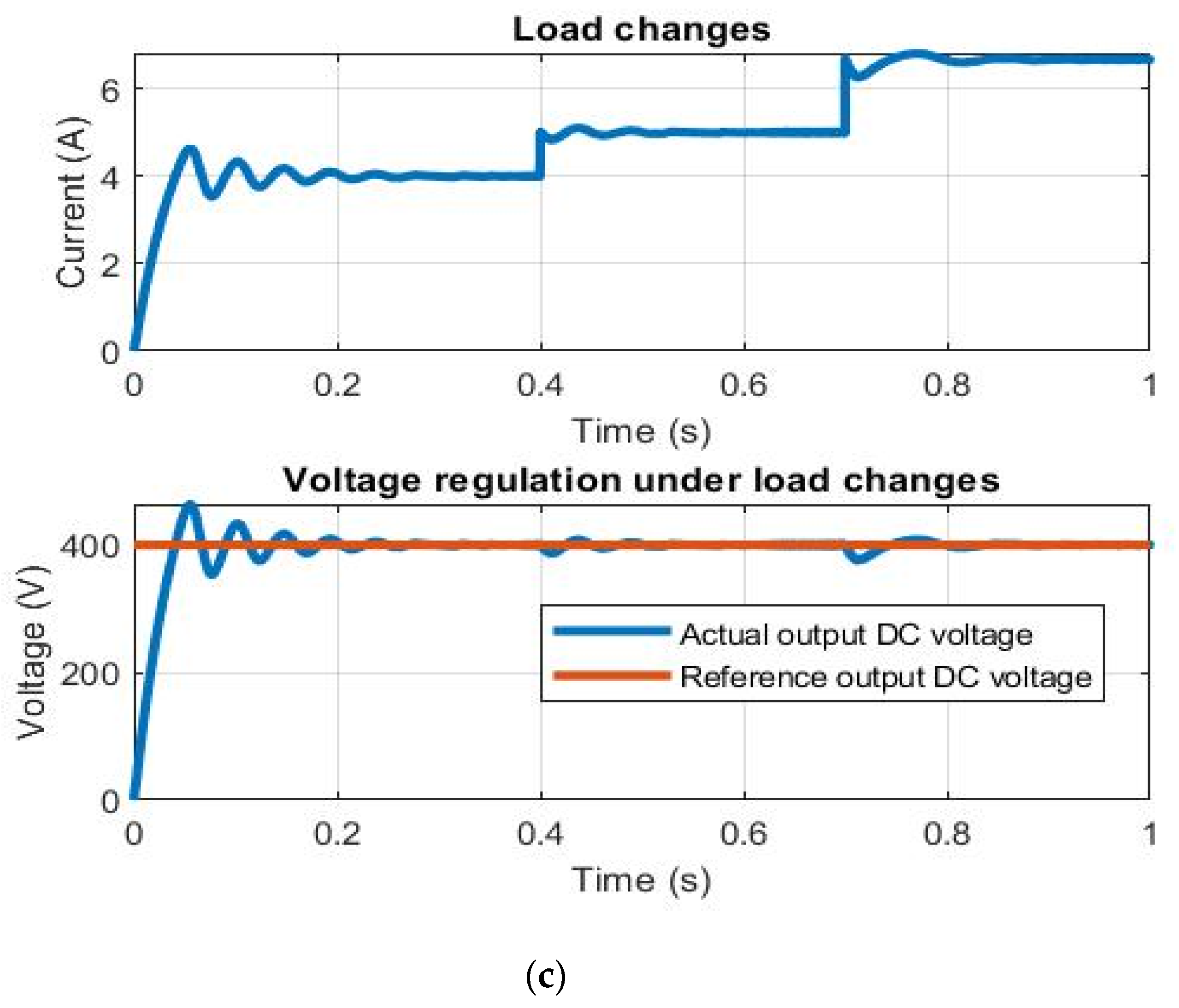
- Voltage regulation under load changes.
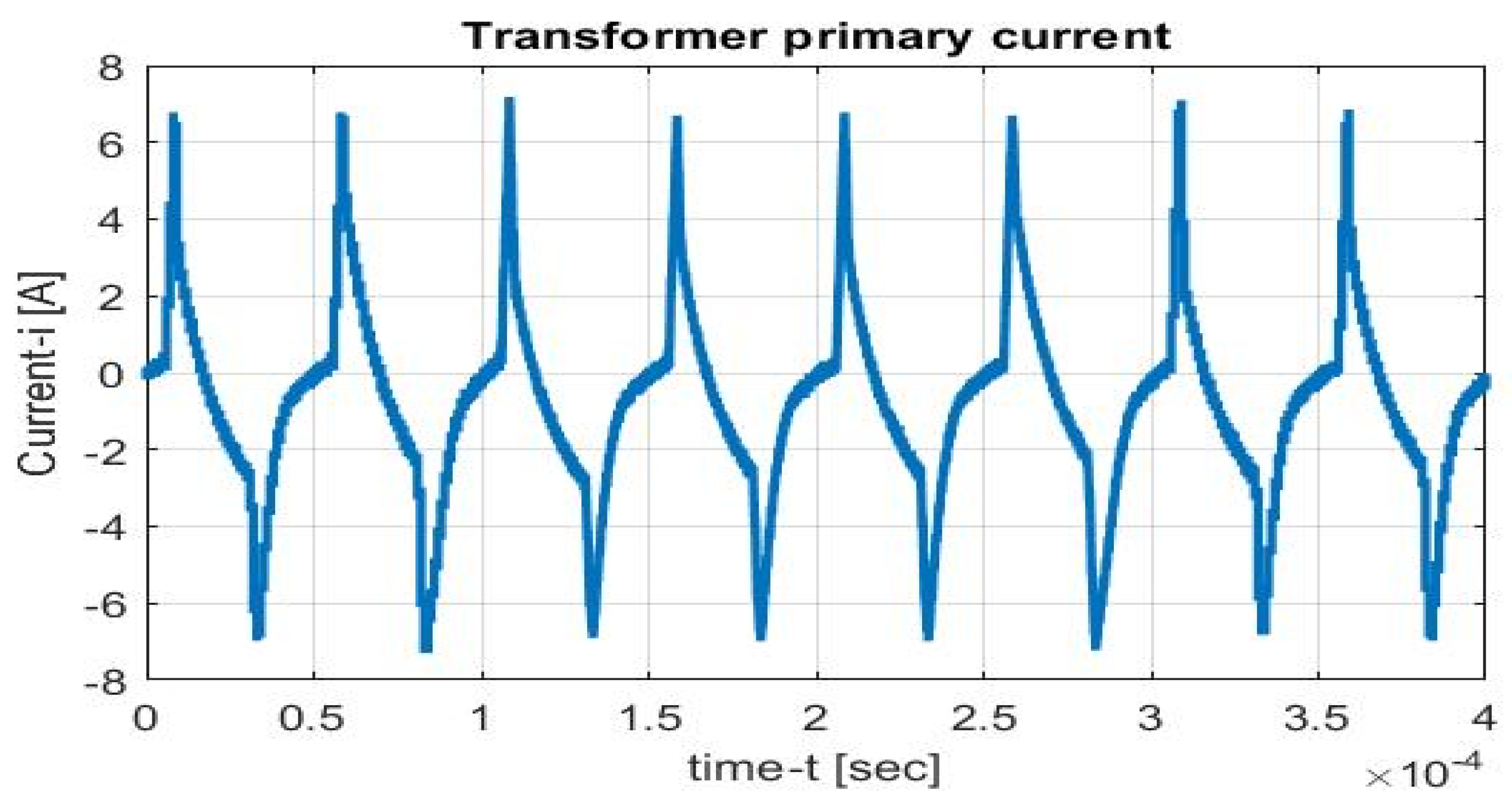
3.1. Dual Active Bridge DC-DC Stage Results
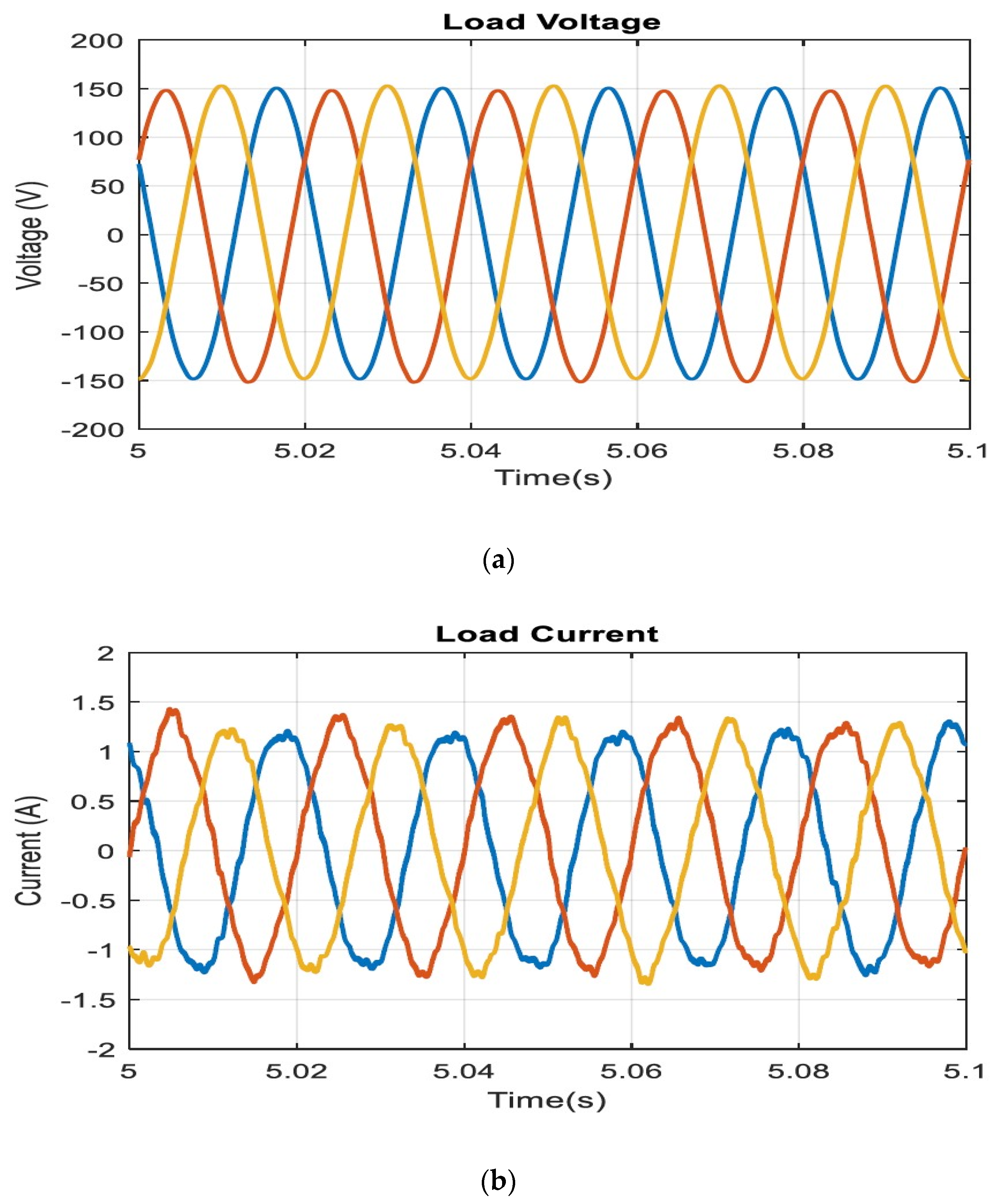
3.2. Three-Phase Inverter DC-AC Stage Results
4. Experimental Results
4.1. Converters
4.2. Load
4.3. Dual Active Bridge DC-DC Stage Results
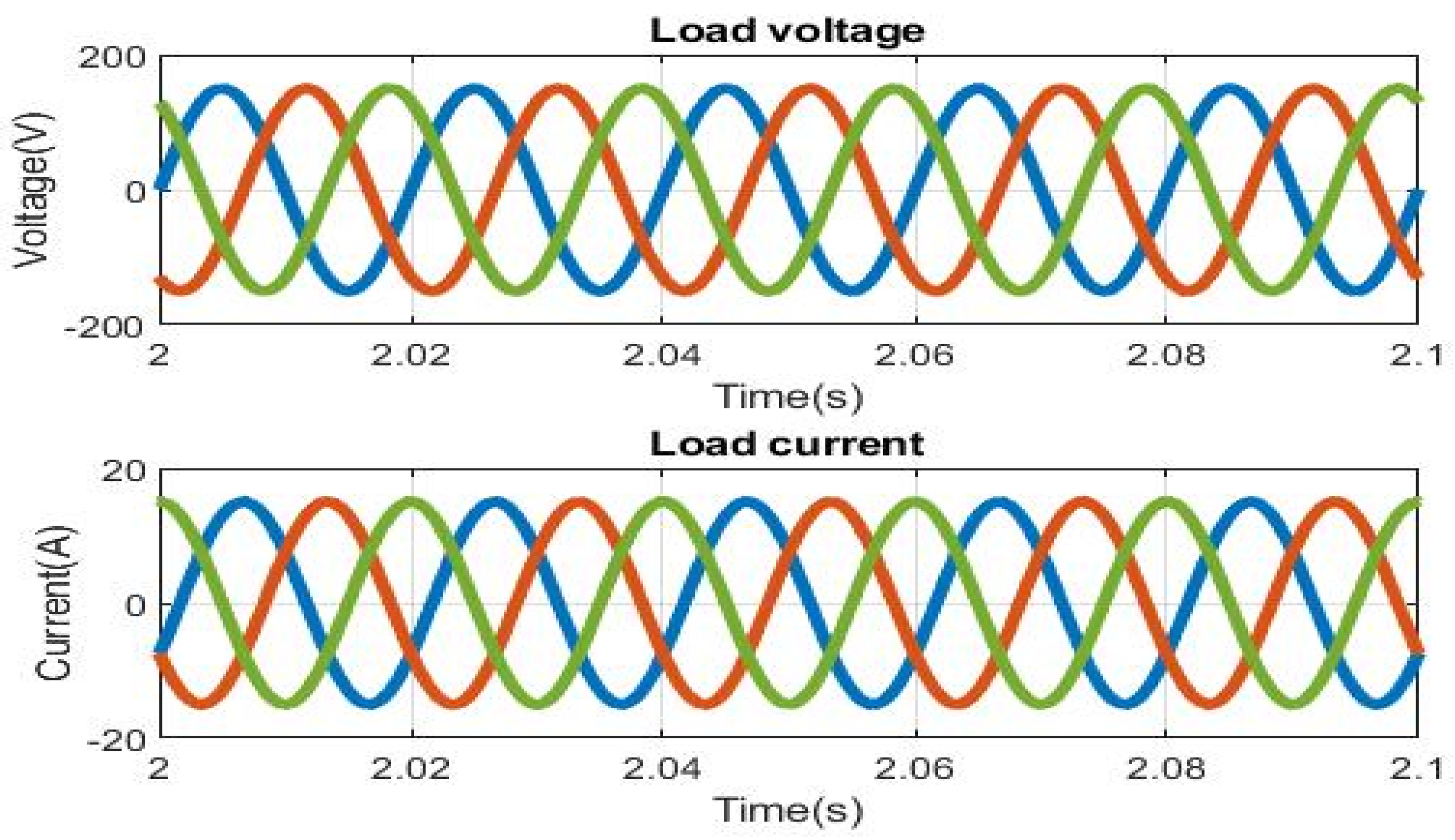
4.4. Three-Phase Inverter DC-AC Stage Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| SST based DC-DC converter: | |
| The primary inductance of the transformer | |
| The secondary inductance of the transformer | |
| The transformer turns ratio | |
| Secondary voltage referred to primary | |
| Phase shift between the primary and secondary voltage | |
| DC link capacitance | |
| Switching frequency of DC-DC converter | |
| Ripple current | |
| Ripple voltage | |
| The minimum of the primary input voltage range | |
| The desired secondary output voltage | |
| The maximum operating phase shift | |
| The maximum transferred power | |
| Switching frequency of DC-DC converter | |
| Three-phase DC-AC inverter: | |
| Line to neutral RMS voltage | |
| DC link voltage | |
| Modulation index | |
| The output of PI controller of current controller | |
| Converter output voltage in dq frame | |
| R, L | Arm reactor resistance and inductance |
| Converter angular frequency | |
| d-q axis voltage | |
| d-q axis inductor current | |
| d-q axis loads current | |
| C | AC side filter capacitance |
| d-q axis voltage | |
| The output of PI controller of voltage controller | |
| Line frequency | |
| Switching frequency of three-phase inverter | |
| Inductor ripple current. | |
References
- Hossain, M.I.; Shafiullah, M.; Abido, M.A. Battery Power Control Strategy for Intermittent Renewable Energy Integrated Modular Multilevel Converter-Based High-Voltage Direct Current Network. Sustainability 2023, 15, 2626. [Google Scholar] [CrossRef]
- Liserre, M.; Buticchi, G.; Andresen, M.; De Carne, G.; Costa, L.F.; Zou, Z.X. The Smart Transformer: Impact on the Electric Grid and Technology Challenges. IEEE Ind. Electron. Mag. 2016, 10, 46–58. [Google Scholar] [CrossRef]
- Khan, S.; Rahman, K.; Tariq, M.; Hameed, S.; Alamri, B.; Babu, T.S. Solid-State Transformers: Fundamentals, Topologies, Applications, and Future Challenges. Sustainability 2021, 14, 319. [Google Scholar] [CrossRef]
- She, X.; Huang, A.Q.; Burgos, R. Review of solid-state transformer technologies and their application in power distribution systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 186–198. [Google Scholar] [CrossRef]
- Hannan, M.A.; Ker, P.J.; Lipu, M.S.H.; Choi, Z.H.; Rahman, M.S.A.; Muttaqi, K.M.; Blaabjerg, F. State of the art of solid-state transformers: Aadvanced topologies, implementation issues, recent progress and improvements. IEEE Access 2020, 8, 19113–19132. [Google Scholar] [CrossRef]
- Shamshuddin, M.A.; Rojas, F.; Cardenas, R.; Pereda, J.; Diaz, M.; Kennel, R. Solid state transformers: Concepts, classification, and control. Energies 2020, 13, 2319. [Google Scholar] [CrossRef]
- Adabi, M.E.; de Catalunya, B.U.P.; Martinez-Velasco, J.A. Solid state transformer technologies and applications: A bibliographical survey. AIMS Energy 2018, 6, 291–338. [Google Scholar] [CrossRef]
- She, X.; Burgos, R.; Wang, G.; Wang, F.; Huang, A.Q. Review of solid state transformer in the distribution system: From components to field application. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 4077–4084. [Google Scholar] [CrossRef]
- De Silva, H.H.H.; Jayamaha, D.K.J.S.; Lidula, N.W.A. Review on design and control of solid state transformer based microgrids. AIMS Energy 2019, 7, 901–923. [Google Scholar] [CrossRef]
- Hossain, I.; Abido, M.A. Active Power Control of PV-Battery Connected MMC-HVDC System for FRT Support. Appl. Sci. 2020, 10, 7186. [Google Scholar] [CrossRef]
- Hossain, I.; Abido, M.A. Positive-Negative Sequence Current Controller for LVRT Improvement of Wind Farms Integrated MMC-HVDC Network. IEEE Access 2020, 8, 193314–193339. [Google Scholar] [CrossRef]
- Falcones, S.; Mao, X.; Ayyanar, R. Topology comparison for Solid State Transformer implementation. In Proceedings of the IEEE PES General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–8. [Google Scholar]
- Sabahi, M.; Hosseini, S.H.; Sharifian, M.B.; Goharrizi, A.Y.; Gharehpetian, G.B. Bi-directional power electronic transformer with maximum power-point tracking capability for induction heating applications. IET Power Electron. 2010, 3, 724–731. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Y.; Abu-Rub, H.; Ge, B. Model predictive control of matrix converter based solid state transformer. Proc. IEEE Int. Conf. Ind. Technol. 2016, 2016, 1248–1253. [Google Scholar]
- Bhaskar, R.; Agarwal, V. Dual pid loop controller for HF link inverter in two-stage SST. In Proceedings of the 2016 IEEE 7th Power India International Conference (PIICON), Bikaner, India, 25–27 November 2016; pp. 54–57. [Google Scholar]
- Besselmann, T.; Mester, A.; Dujic, D. Power Electronic Traction Transformer: Efficiency Improvements Under Light-Load Conditions. IEEE Trans. Power Electron. 2013, 29, 3971–3981. [Google Scholar] [CrossRef]
- Lai, J.-S.; Maitra, A.; Goodman, F. Performance of a Distribution Intelligent Universal Transformer under Source and Load Disturbances. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006; pp. 719–725. [Google Scholar]
- Ruiz, F.; Perez, M.A.; Espinosa, J.R.; Gajowik, T.; Stynski, S.; Malinowski, M. Surveying solid-state transformer structures and controls: Providing highly efficient and controllable power flow in distribution grids. IEEE Ind. Electron. Mag. 2020, 14, 56–70. [Google Scholar] [CrossRef]
- Bifaretti, S.; Zanchetta, P.; Watson, A.; Tarisciotti, L.; Clare, J.C. Advanced Power Electronic Conversion and Control System for Universal and Flexible Power Management. IEEE Trans. Smart Grid 2011, 2, 231–243. [Google Scholar] [CrossRef]
- Acikgoz, H.; Kececioglu, O.F.; Karadol, I.; Gani, A.; Sekkeli, M. Adaptive Control of Solid State Transformer Using Type-2 Fuzzy Neural System. Stud. Informatics Control 2017, 26, 171–181. [Google Scholar] [CrossRef]
- Acikgoz, H.; Kececioglu, O.F.; Yildiz, C.; Gani, A.; Sekkeli, M. Performance analysis of electronic power transformer based on neuro-fuzzy controller. SpringerPlus 2016, 5, 1350. [Google Scholar] [CrossRef] [PubMed]
- Hooshmand, R.A.; Ataei, M.; Rezaei, M.H. Improving the dynamic performance of distribution electronic power transformers using sliding mode control. J. Power Electron. 2012, 12, 145–156. [Google Scholar] [CrossRef]
- Sahoo, B.; Routray, S.K.; Rout, P.K. Artificial Neural Network-Based PI-Controlled Reduced Switch Cascaded Multilevel Inverter Operation in Wind Energy Conversion System with Solid-State Transformer. Iran. J. Sci. Technol. Trans. Electr. Eng. 2019, 43, 1053–1073. [Google Scholar] [CrossRef]
- Segaran, D.S. Dynamic Modelling and Control of Dual Active Bridge Bi-Directional DC-DC Converters for Smart Grid Applications. Ph.D. Thesis, Monash University, Melbourne, Australia, 2006. [Google Scholar]
- Wang, J.; Huang, A.Q.; Sung, W.; Liu, Y.; Baliga, J. Development of 15-kV SiC IGBTs and Their Impact on Utility Applications. IEEE Ind. Mag. 2009, 3, 16–23. [Google Scholar] [CrossRef]
- Huber, J.E.; Kolar, J.W. Solid-State Transformers: On the Origins and Evolution of Key Concepts. IEEE Ind. Electron. Mag. 2016, 10, 19–28. [Google Scholar] [CrossRef]
- Seyezhai, R. Performance Evaluation of Modulation strategies for Dual Active Bridge Multiport DC-DC Converter. IOSR J. Eng. 2011, 1, 77–83. [Google Scholar] [CrossRef]
- Guo, Z. Modulation Scheme of Dual Active Bridge Converter for Seamless Transitions in Multiworking Modes Compromising ZVS and Conduction Loss. IEEE Trans. Ind. Electron. 2020, 67, 7399–7409. [Google Scholar] [CrossRef]
- Fan, H.; Li, H. High-Frequency Transformer Isolated Bidirectional DC–DC Converter Modules with High Efficiency Over Wide Load Range for 20 kVA Solid-State Transformer. IEEE Trans. Power Electron. 2011, 26, 3599–3608. [Google Scholar] [CrossRef]
- Qin, H.; Kimball, J.W. Closed-loop control of DC-DC dual active bridge converters driving single-phase inverters. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 173–179. [Google Scholar]
- Hurley, W.G.; Wölfle, W.H. Transformers and Inductors for Power Electronics: Theory, Design and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- McLyman, C.W.T. Transformer and Inductor Design Handbook, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W.; Sun, Y. Overview of Dual-Active-Bridge Isolated Bidirectional DC–DC Converter for High-Frequency-Link Power-Conversion System. IEEE Trans. Power Electron. 2013, 29, 4091–4106. [Google Scholar] [CrossRef]
- Shri, A. A Solid-State Transformer for Interconnection between the Medium- and the Low-Voltage Grid Design, Control and Behavior Analysis Challenge the Future. Master’s Thesis, DELFT University, Delft, The Netherlands, 2013. [Google Scholar]
- Hossain, M.I.; Abido, M.A.; Pathan, M.I. PMSG Based Wind Energy Integration into MMC Based HVDC Transmission Network in RTDS. In Proceedings of the 2020 IEEE Electric Power and Energy Conference, EPEC, Edmonton, AB, Canada, 9–10 November 2020. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J.; Zhao, Y. A Unified Control Strategy for Three-Phase Inverter in Distributed Generation. IEEE Trans. Power Electron. 2013, 29, 1176–1191. [Google Scholar]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power systems: Modeling, Control, and Applications; IEEE Press: Piscataway, NJ, USA; John Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Hossain, I.; Shafiullah; Abido, M. VSC Controllers for Multiterminal HVDC Transmission System: A Comparative Study. Arab. J. Sci. Eng. 2020, 45, 6411–6422. [Google Scholar] [CrossRef]
- Hossain, I.; Shafiullah; Al-Sulaiman, F.A.; Abido, M.A. Comprehensive Analysis of PV and Wind Energy Integration into MMC-HVDC Transmission Network. Sustainability 2022, 15, 253. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Power rating | 2 kW | |
| DC-DC stage (using dual active bridge topology) | ||
| Input voltage (primary input side) | 200 V | |
| Output voltage (secondary output side) | 400 V | |
| DC-AC stage (using 3-leg converter topology) | ||
| Input voltage | 400 V | |
| Output line voltage | 110 V RMS | |
| Parameter | Symbol | Value |
|---|---|---|
| Sampling time | 1 sec | |
| Proportional gain | 0.306 | |
| Integral gain | 90 | |
| Maximum phase shift |
| Parameter | Symbol | Value |
|---|---|---|
| Switching frequency | 20 kHz | |
| Apparent power | 2585 VA | |
| Output power | 2 kW | |
| Primary DC link voltage | 175–200 V | |
| Secondary DC link voltage | 400 V | |
| Transformer primary RMS rated current | 13.9 A | |
| Transformer secondary RMS rated current | 5.64 A | |
| Desired leakage inductance | 78.8 μH |
| Parameter | Choice |
|---|---|
| Core material | Ferrite |
| Material series | N87 |
| Core structure | Shell-type |
| Core data | EE 70/33/32 |
| Core cross sectional area () | 6.83 cm2 |
| Window area ( | 5.69 cm2 |
| Core mean length ( | 149 mm |
| Wire type | Round litz wire |
| Wire designation | 3/54/38 |
| Winding data | Split geometry |
| Parameter | Symbol | Value |
|---|---|---|
| Primary wire resistance | 0.023 Ω | |
| Secondary wire resistance | 0.023 Ω | |
| Leakage inductance referred to primary | 75.16 μH | |
| Magnetizing inductance referred to primary | 113.3 μH |
| Parameter | Symbol | Value |
|---|---|---|
| Switching frequency | 10 kHz | |
| Maximum output power | 2 kW | |
| Input voltage | 400 V | |
| Output filter inductor | 2.5 mH | |
| Output filter capacitor | 8 μF | |
| Output line voltage | 190 V RMS |
| Parameter | Symbol | Value |
|---|---|---|
| Sampling time | 20 sec | |
| Voltage control loop, PI1 | ||
| Proportional gain | 0.1 | |
| Integral gain | 100 | |
| Current control loop, PI2 | ||
| Proportional gain | 30 | |
| Integral gain | 200 | |
| Case Studies | Test Parameters | ||
|---|---|---|---|
| Input Voltage | Load Resistance | Output Reference Voltage | |
| Case 1: Voltage reference tracking | 200 V | 80 Ω | 350 V, 370 V, 380 V, and 400 V |
| Case 2: Voltage regulation under input voltage disturbances | 150 V, 170 V, 180 V, and 200 V | 80 Ω | 400 V |
| Case 3: Voltage regulation under load changes | 200 V | 100 Ω, 80 Ω, and 60 Ω | 400 V |
| Case Studies | Test Parameters | ||
|---|---|---|---|
| Input Voltage | Load Resistance | Output Reference Phase Voltage | |
| Case 1: Voltage reference tracking | 400 V | 15 Ω | 125 V, 150 V, 125 V, and 100 V |
| Case 2: Voltage regulation under input voltage disturbances | 375 V, 400 V, and 425 V | 15 Ω | 150 V |
| Case 3: Voltage regulation under load changes | 400 V | 10 Ω, 5 Ω, | 150 V |
| Case Studies | Test Parameters | ||
|---|---|---|---|
| Input Voltage | Load Resistance | Output Reference Voltage | |
| Case 1: Voltage reference tracking | 120 V | 200 Ω | 250 V, 260 V, 270 V, 280 V, 290 V, and 300V |
| Case 2: Voltage regulation under input voltage disturbances | 85–125 V | 200 Ω | 300 V |
| Case 3: Voltage regulation under load changes | 120 V | Gradually decrease 3000–300 Ω | 300 V |
| Case Studies | Test Parameters | ||
|---|---|---|---|
| Input Voltage | Loading | Output Reference Phase Voltage | |
| Case 1: Voltage reference tracking | 400 V | 50 Ω | 125 V, 150 V, 125 V, and 100 V |
| Case 2: Voltage regulation under input voltage disturbances | 375 V, 400 V, and 420 V | 50 Ω | 150 V |
| Case 3: Voltage regulation under load changes | 400 V | 0.75 kW, 220 V, and 60 Hz Induction motor | 150 V |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bineshaq, A.; Hossain, M.I.; Binqadhi, H.; Salem, A.; Abido, M.A. Design and Control of Two-Stage DC-AC Solid-State Transformer for Remote Area and Microgrid Applications. Sustainability 2023, 15, 7345. https://doi.org/10.3390/su15097345
Bineshaq A, Hossain MI, Binqadhi H, Salem A, Abido MA. Design and Control of Two-Stage DC-AC Solid-State Transformer for Remote Area and Microgrid Applications. Sustainability. 2023; 15(9):7345. https://doi.org/10.3390/su15097345
Chicago/Turabian StyleBineshaq, Amer, Md Ismail Hossain, Hamed Binqadhi, Aboubakr Salem, and Mohammad A. Abido. 2023. "Design and Control of Two-Stage DC-AC Solid-State Transformer for Remote Area and Microgrid Applications" Sustainability 15, no. 9: 7345. https://doi.org/10.3390/su15097345
APA StyleBineshaq, A., Hossain, M. I., Binqadhi, H., Salem, A., & Abido, M. A. (2023). Design and Control of Two-Stage DC-AC Solid-State Transformer for Remote Area and Microgrid Applications. Sustainability, 15(9), 7345. https://doi.org/10.3390/su15097345