
Behavior of Horizontal-Directional Drilling for Multi-Pilot Heading Pretreating Blind Spots in Pipe Jacking Construction
Abstract
:1. Introduction
2. Engineering Background
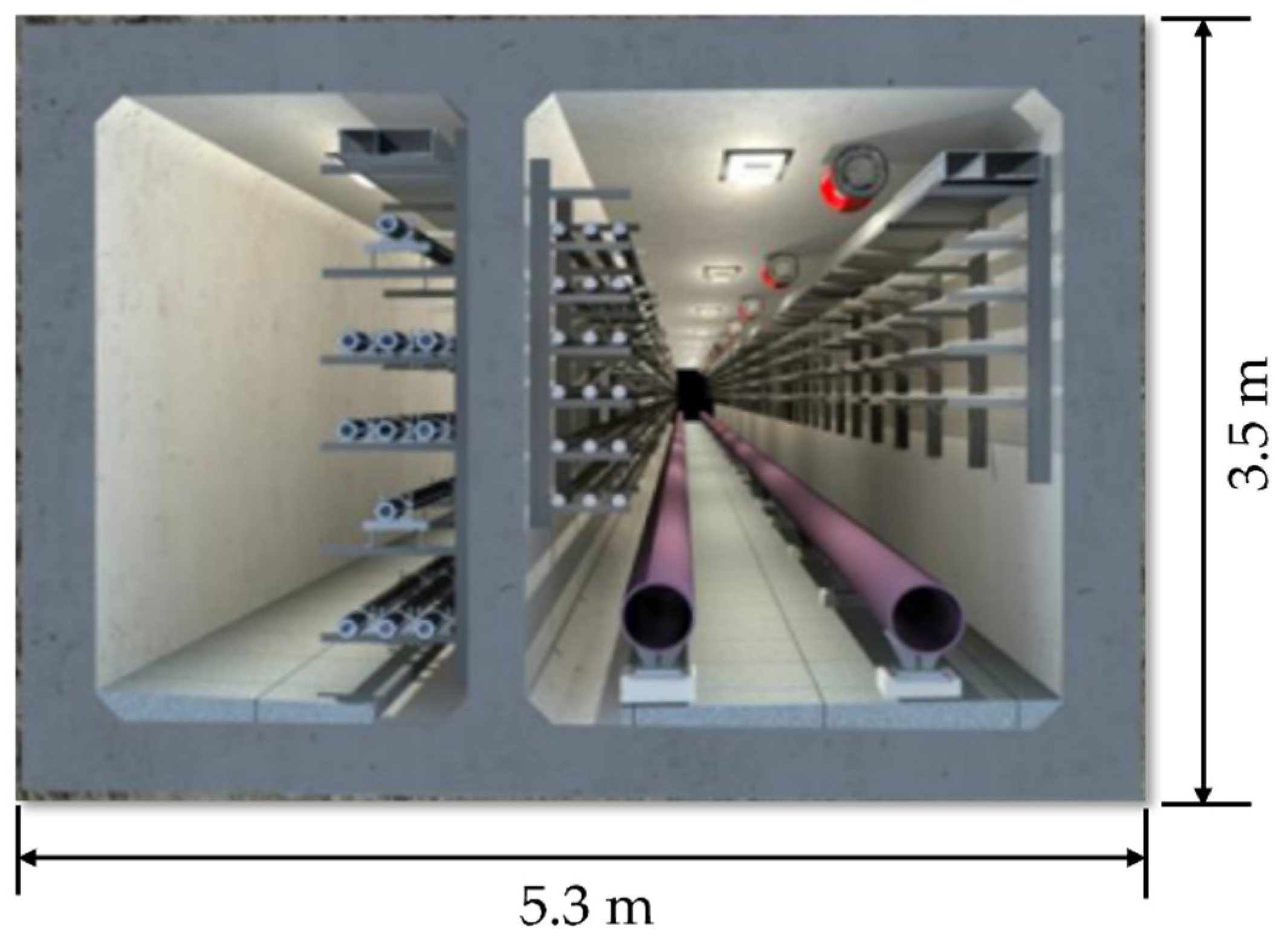
2.1. Engineering Profile
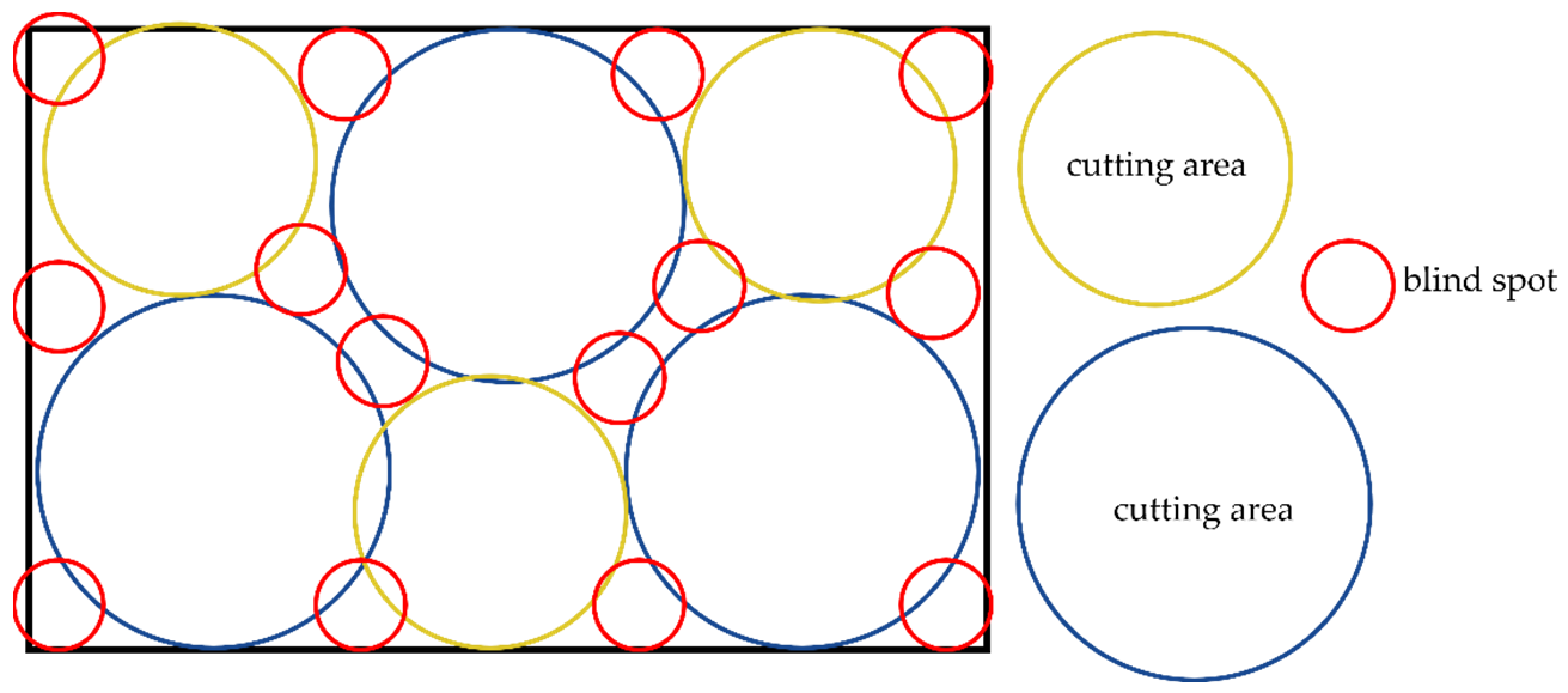
2.2. Multi-Pilot Heading Pretreatment
3. Proposal of the Numerical Model for the Pilot Heading Pretreatment Using Horizontal-Directional Drilling
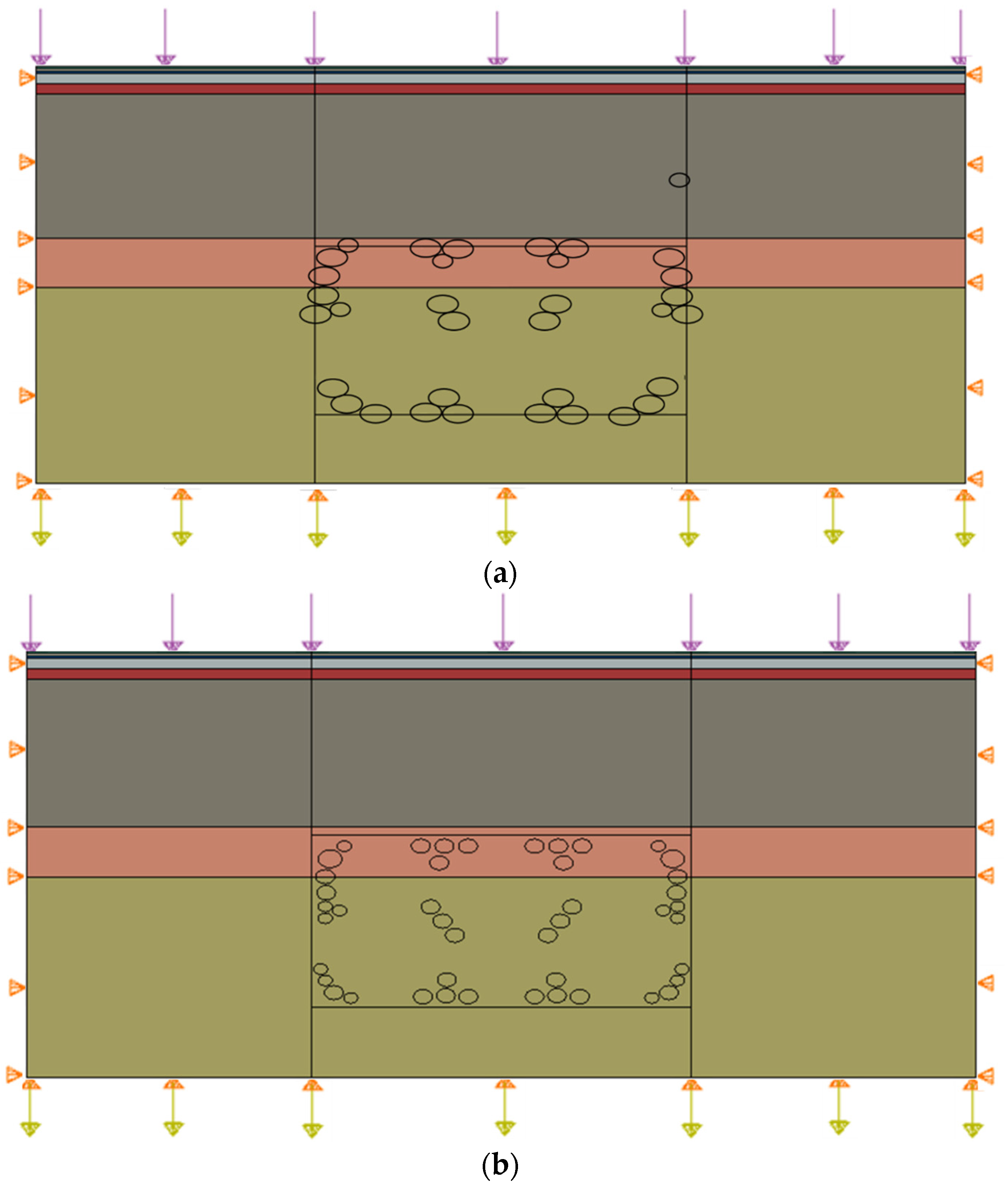
3.1. Numerical Model
3.2. Material Properties
3.3. Model Mesh
3.4. State of the Initial Stress and Displacement Fields
4. Numerical Investigation into the Behavior of Surrounding Rocks with Varied Distribution Positions and Sizes of Drilling Holes in Horizontal-Directional Drilling
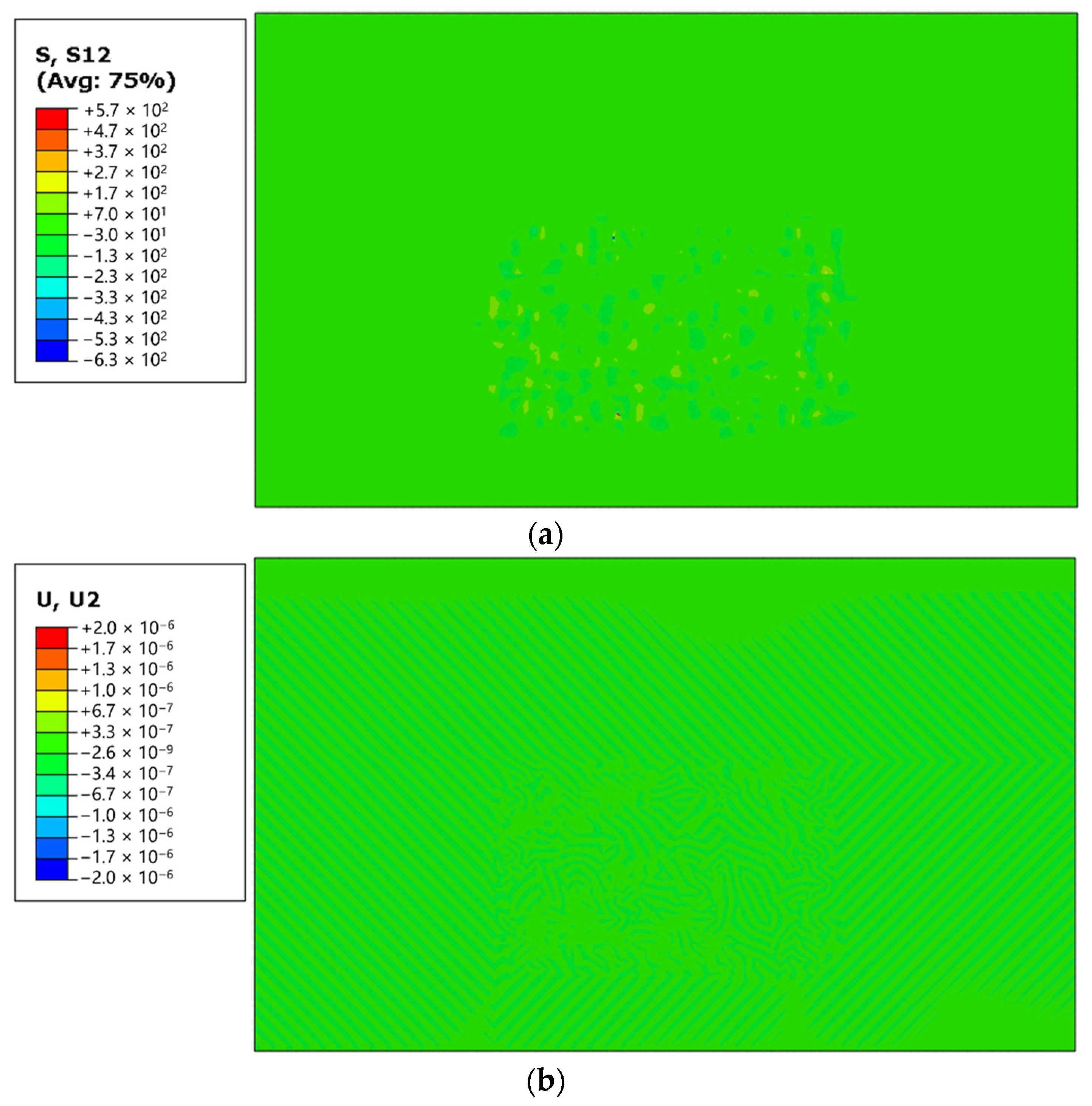
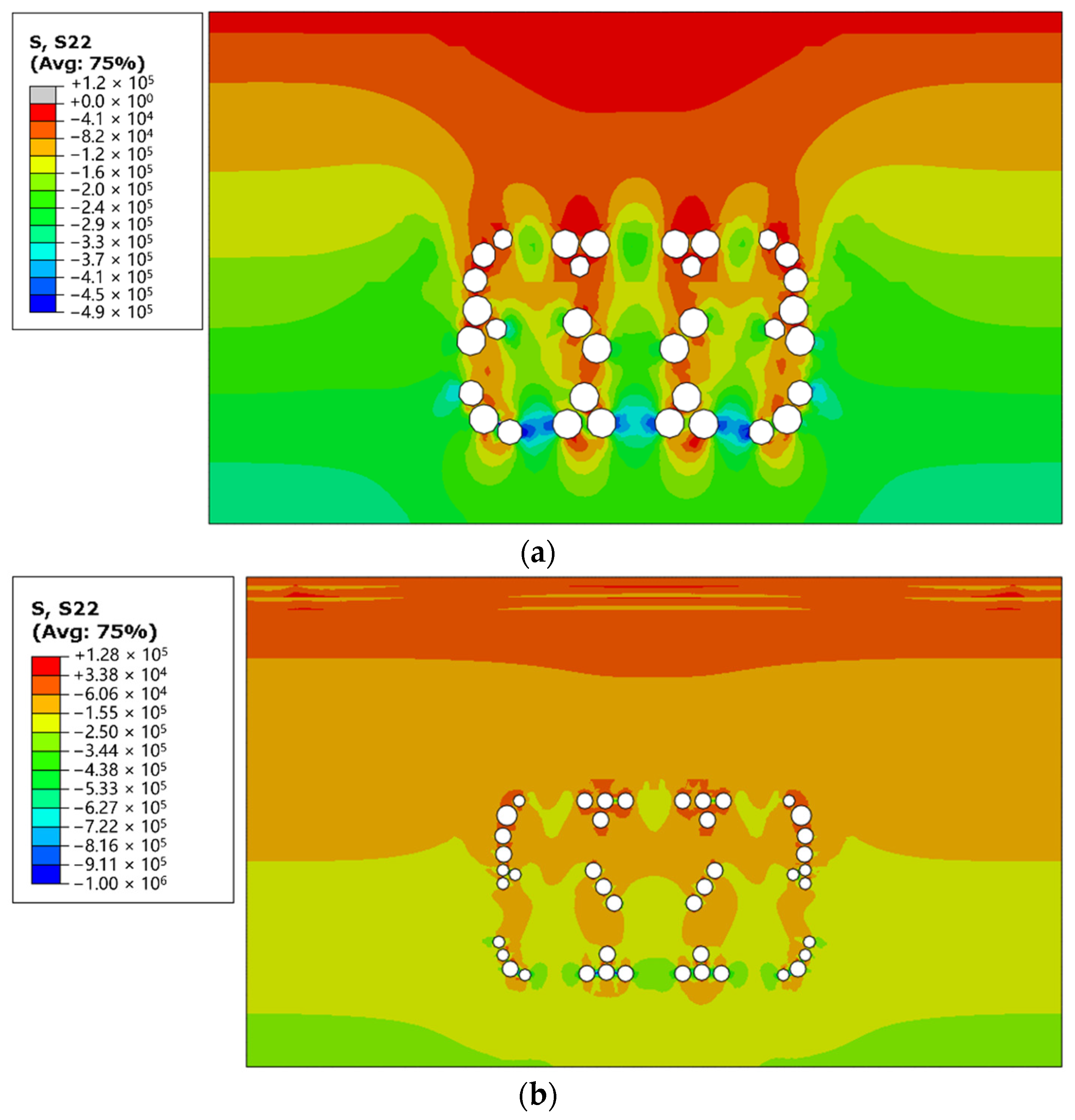
4.1. Stress Redistribution of Surrounding Rocks
4.2. Vertical Displacement of Surrounding Rocks
5. Verification by Practical Implementation
5.1. Numerical Model Validation
5.2. Implementation of Horizontal-Directional Drilling
6. Conclusions
- (1)
- The horizontal-directional drilling employed for the multi-pilot heading pretreatment could effectively break the blind spots on the working face of the pipe jacking machine with a rectangular cross-section, which was implemented prior to operating the pipe jacking machine with a rectangular cross-section in the shallow buried rock strata. Moreover, the implementation of the horizontal-directional drilling could also significantly release the stresses of the surrounding rocks from the initial ones in advance.
- (2)
- The distribution positions and sizes of the drilling holes when implementing the horizontal-directional drilling had a significant influence on the safety of the adjacent infrastructure and stability of the surrounding rocks. Therefore, the aforementioned distribution positions and sizes of the drilling holes should be appropriately optimized and designed for the multi-pilot heading pretreatment in pipe jacking construction when using a pipe jacking machine with a rectangular cross-section whilst working in shallow buried rock strata.
- (3)
- The numerical analysis could be employed to determine the distribution positions and sizes of the drilling holes when implementing horizontal-directional drilling applied for a multi-pilot heading pretreatment in pipe jacking construction using a pipe jacking machine with a rectangular cross-section whilst working in shallow buried rock strata, the effectiveness of which was confirmed in this case study.
- (4)
- The horizontal-directional drilling employed for the multi-pilot heading pretreatment in this case study can provide useful references for safely constructing rectangular comprehensive pipe galleries adjacent to existing infrastructure in shallow buried rock strata, in which a pipe jacking machine with a rectangular cross-section can be adopted for constructing the rectangular comprehensive pipe gallery, and the aforementioned multi-pilot heading pretreatment using horizontal-directional drilling can be implemented prior to operating the pipe jacking machine with a rectangular cross-section in shallow buried rock strata.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Deng, R.F.; Ding, X.; Wang, J.L. Landscape ecological risk assessment and spatial pattern evolution analysis of the Central Yunnan Urban Agglomeration from 1995 to 2020 based on land use/cover change. Sustainability 2023, 15, 16641. [Google Scholar] [CrossRef]
- Zhang, W.H.; Song, Y.J.; Zhou, G.; Song, Z.W.; Xi, C. Multiobjective-based decision-making for the optimization of an urban passenger traffic system structure. Sustainability 2023, 15, 13644. [Google Scholar] [CrossRef]
- Zhang, P.; Feng, X.; Zeng, C.; Ariaratnam, S.T. Field performance of steel pipes during curve jacking in Gongbei tunnel. Tunn. Undergr. Space Technol. 2022, 128, 104585. [Google Scholar] [CrossRef]
- Chang, C.T.; Wang, M.J. Repair of displaced shield tunnel of the Taipei rapid transit system. Tunneling Undergr. Space Technol. 2001, 16, 163–173. [Google Scholar] [CrossRef]
- Tao, L.J.; Zhang, Y.; Zhao, X.; Bian, J.; Chen, X.H.; An, S.; Han, X.C. Group effect of pipe jacking in silty sand. J. Geotech. Geoenviron. Eng. 2021, 147, 05021012. [Google Scholar] [CrossRef]
- Wang, J.; Wang, P.C.; Wang, W.D.; Zhou, S.Q.; Fang, X. Optimization analysis of deformation of underlying tunnel in dewatering and excavation of phreatic aquifer. Adv. Mater. Sci. Eng. 2019, 2019, 2461817. [Google Scholar] [CrossRef]
- Singh, T.N.; Sazid, M. Simulation of old surface and underground working for assessment of slope stability. In Proceedings of the International Geomechanics Symposium, Al Khobar, Saudi Arabia, 30 October–2 November 2023. [Google Scholar]
- Ma, M.L.; Han, L.; Wu, Y.H.; Li, Q.Y.; Zhang, Y.X. Behavior investigation of three parallel large-size reinforced concrete circular pipes with the construction of pipe jacking. Appl. Sci. 2023, 13, 8901. [Google Scholar] [CrossRef]
- Ye, Y.C.; Peng, L.M.; Zhou, Y. Prediction of friction resistance for slurry pipe jacking. Appl. Sci. 2020, 10, 207. [Google Scholar] [CrossRef]
- Wen, K.; Shimada, H.; Zeng, W.; Sasaoka, T.; Qian, D.Y. Frictional analysis of pipe-slurry-soil interaction and jacking force prediction of pipe jacking. Eur. J. Environ. Civ. Eng. 2020, 24, 814–832. [Google Scholar] [CrossRef]
- Lueke, J.S.; Ariaratnam, S.T. Surface heave mechanisms in horizontal directional drilling. J. Constr. Eng. Manag. 2005, 131, 540–547. [Google Scholar] [CrossRef]
- Shu, B.; Ma, B.S. The return of drilling fluid large diameter horizontal directional drilling boreholes. Tunn. Undergr. Space Technol. 2016, 52, 1–11. [Google Scholar] [CrossRef]
- Yan, X.F.; Ariaratnam, S.T.; Dong, S.; Zeng, C. Horizontal directional drilling: State-of-the-art review of theory and applications. Tunn. Undergr. Space Technol. 2018, 72, 162–173. [Google Scholar] [CrossRef]
- Ariaratnam, S.T.; Harbin, B.C.; Stauber, R.L. Modeling of annular fluid pressures in horizontal boring. Tunn. Undergr. Space Technol. 2007, 22, 610–619. [Google Scholar] [CrossRef]
- Zhang, X.M.; Ou, X.F.; Yang, J.S.; Fu, J.Y. Deformation response of an existing tunnel to upper excavation of foundation pit and associated dewatering. Int. J. Geomech. 2017, 17, 04016112. [Google Scholar] [CrossRef]
- Sun, H.S.; Chen, Y.D.; Zhang, J.H.; Kuang, T.S. Analytical investigation of tunnel deformation caused by circular foundation pit excavation. Comput. Geotech. 2019, 106, 193–198. [Google Scholar] [CrossRef]
- Li, D. Superior research for selection of bracing structure of deep pit foundation based on fussy theory. Adv. Mater. Res. 2013, 838, 214–218. [Google Scholar] [CrossRef]
- Wang, J.X.; Feng, B.; Yu, H.P.; Guo, T.P.; Yang, G.Y.; Tang, J.W. Numerical study of dewatering in a large deep foundation pit. Environ. Earth Sci. 2013, 69, 863–872. [Google Scholar] [CrossRef]
- Ye, S.H.; Zhao, Z.F.; Wang, D.Q. Deformation analysis and safety assessment of existing metro tunnels affected by excavation of a foundation pit. Undergr. Space 2021, 6, 421–431. [Google Scholar] [CrossRef]
- Li, J.J.; Chen, Q.; Huang, X.; Zou, G.; Deng, J. Pretreatment for tunnel karst cave during excavation: A case study of Guangxi, China. Adv. Civ. Eng. 2021, 2021, 9013815. [Google Scholar] [CrossRef]
- Li, P.; Liu, C.; Zhang, Y.X.; Zhang, J.; Yang, J.S.; Feng, T.G. Construction practice of landslide during tunneling in hilly topography. Eng. Fail. Anal. 2019, 104, 1234–1241. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stratum | Unit Weight | Elastic Modulus | Poisson’s Ratio | Cohesive Force | Friction Angle | Layer Depth |
|---|---|---|---|---|---|---|
| kg/m³ | MPa | kPa | ° | m | ||
| Plain soil | 1870 | 9.9 | 0.3 | 8 | 6 | 0.2 |
| Clay 3-2 | 1900 | 7.4 | 0.3 | 30 | 14 | 0.3 |
| Clay 4-1 | 1920 | 11.4 | 0.3 | 52 | 16 | 0.3 |
| Moderately weathered mudstone and sandstone | 2470 | 46 | 0.48 | 100 | 29 | 3.1 |
| Strongly weathered mudstone | 2200 | 43 | 0.3 | 34 | 14 | 1.2 |
| Moderately weathered mudstone | 2490 | 46 | 0.48 | 95 | 28 | 4.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Yang, R.; Dai, H.; Dong, Z.; Zhang, Y. Behavior of Horizontal-Directional Drilling for Multi-Pilot Heading Pretreating Blind Spots in Pipe Jacking Construction. Sustainability 2024, 16, 314. https://doi.org/10.3390/su16010314
Xu B, Yang R, Dai H, Dong Z, Zhang Y. Behavior of Horizontal-Directional Drilling for Multi-Pilot Heading Pretreating Blind Spots in Pipe Jacking Construction. Sustainability. 2024; 16(1):314. https://doi.org/10.3390/su16010314
Chicago/Turabian StyleXu, Binbin, Runlai Yang, Hao Dai, Zhichao Dong, and Yongxing Zhang. 2024. "Behavior of Horizontal-Directional Drilling for Multi-Pilot Heading Pretreating Blind Spots in Pipe Jacking Construction" Sustainability 16, no. 1: 314. https://doi.org/10.3390/su16010314