

Evaluating an Innovative ICT System for Monitoring Small-Scale Forest Operations: Preliminary Tests in Mediterranean Oak Coppices

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
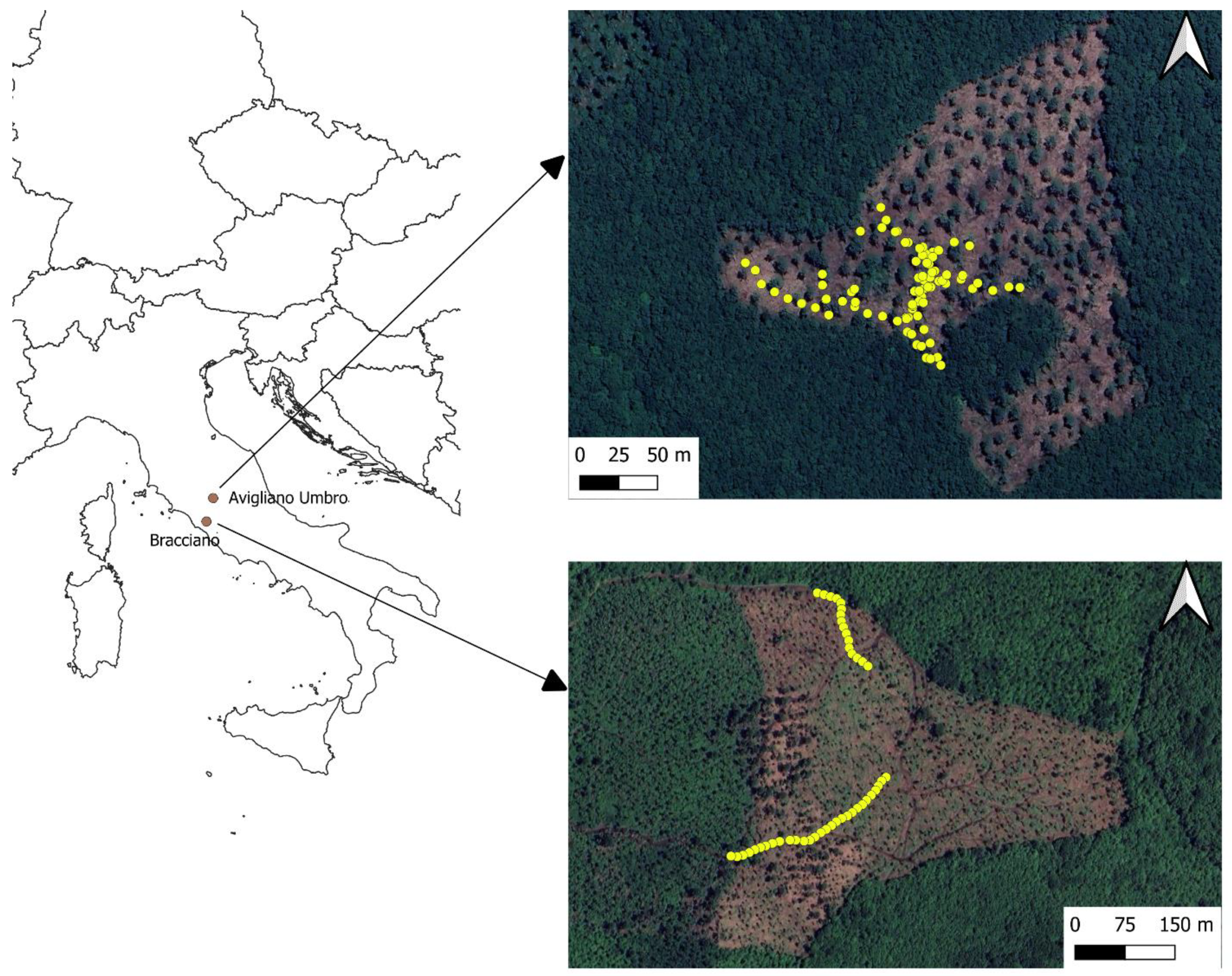
2.1. Study Areas
2.2. Field Surveys
2.3. Investigated Terrain Features and Statistical Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Latterini, F.; Dyderski, M.K.; Horodecki, P.; Picchio, R.; Venanzi, R.; Lapin, K.; Jagodziński, A.M. The Effects of Forest Operations and Silvicultural Treatments on Litter Decomposition Rate: A Meta-Analysis. Curr. For. Rep. 2023, 9, 276–290. [Google Scholar] [CrossRef]
- Marchi, E.; Chung, W.; Visser, R.; Abbas, D.; Nordfjell, T.; Mederski, P.S.; McEwan, A.; Brink, M.; Laschi, A. Sustainable Forest Operations (SFO): A New Paradigm in a Changing World and Climate. Sci. Total Environ. 2018, 634, 1385–1397. [Google Scholar] [CrossRef] [PubMed]
- Latterini, F.; Mederski, P.S.; Jaeger, D.; Venanzi, R.; Tavankar, F.; Picchio, R. The Influence of Various Silvicultural Treatments and Forest Operations on Tree Species Biodiversity. Curr. For. Rep. 2023, 9, 59–71. [Google Scholar] [CrossRef]
- Labelle, E.R.; Hansson, L.; Högbom, L.; Jourgholami, M.; Laschi, A. Strategies to Mitigate the Effects of Soil Physical Disturbances Caused by Forest Machinery: A Comprehensive Review. Curr. For. Rep. 2022, 8, 20–37. [Google Scholar] [CrossRef]
- Vančura, K.; Šimková, M.; Vacek, Z.; Vacek, S.; Gallo, J.; Šimůnek, V.; Podrázský, V.; Štefančík, I.; Hájek, V.; Prokůpková, A.; et al. Effects of Environmental Factors and Management on Dynamics of Mixed Calcareous Forests under Climate Change in Central European Lowlands. Dendrobiology 2022, 87, 79–100. [Google Scholar] [CrossRef]
- European Union. New European Forest Strategy for 2030. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A52021DC0572 (accessed on 15 August 2021).
- Britto, P.C.; Jaeger, D.; Hoffmann, S.; Robert, R.C.G.; Vibrans, A.C.; Fantini, A.C. Impact Assessment of Timber Harvesting Operations for Enhancing Sustainable Management in a Secondary Atlantic Forest. Sustainability 2019, 11, 6272. [Google Scholar] [CrossRef]
- Santopuoli, G.; Temperli, C.; Alberdi, I.; Barbeito, I.; Bosela, M.; Bottero, A.; Klopčič, M.; Lesinski, J.; Panzacchi, P.; Tognetti, R. Pan-European Sustainable Forest Management Indicators for Assessing Climate-Smart Forestry in Europe. Can. J. For. Res. 2021, 51, 1741–1750. [Google Scholar] [CrossRef]
- Oliver, C.D.; Nassar, N.T.; Lippke, B.R.; McCarter, J.B. Carbon, Fossil Fuel, and Biodiversity Mitigation with Wood and Forests. J. Sustain. For. 2014, 33, 248–275. [Google Scholar] [CrossRef]
- Schaaf, A.A.; García, C.G.; Ruggera, R.A.; Tallei, E.; Vivanco, C.G.; Rivera, L.; Politi, N. Influence of Logging on Nest Density and Nesting Microsites of Cavity-Nesting Birds in the Subtropical Forests of the Andes. For. Int. J. For. Res. 2022, 95, 73–82. [Google Scholar] [CrossRef]
- Hoffmann, S.; Schönauer, M.; Heppelmann, J.; Asikainen, A.; Cacot, E.; Eberhard, B.; Hasenauer, H.; Ivanovs, J.; Jaeger, D.; Lazdins, A.; et al. Trafficability Prediction Using Depth-to-Water Maps: The Status of Application in Northern and Central European Forestry. Curr. For. Rep. 2022, 8, 55–71. [Google Scholar] [CrossRef]
- Keefe, R.F.; Zimbelman, E.G.; Picchi, G. Use of Individual Tree and Product Level Data to Improve Operational Forestry. Curr. For. Rep. 2022, 8, 148–165. [Google Scholar] [CrossRef]
- Kovácsová, P.; Antalová, M. Precision Forestry-Definition and Technologies. Sumar List 2010, 134, 603–611. [Google Scholar]
- Holopainen, M.; Vastaranta, M.; Hyyppä, J. Outlook for the Next Generation’s Precision Forestry in Finland. Forests 2014, 5, 1682–1694. [Google Scholar] [CrossRef]
- Venanzi, R.; Latterini, F.; Civitarese, V.; Picchio, R. Recent Applications of Smart Technologies for Monitoring the Sustainability of Forest Operations. Forests 2023, 14, 1503. [Google Scholar] [CrossRef]
- Tsioras, P.A.; Żak, J.; Karaszewski, Z. RFID Implementations in the Wood Supply Chains: State of the Art and the Way to the Future. Drewno Pr. Nauk. Doniesienia Komun. Wood Res. Pap. Rep. Announc. 2022, 65, 209. [Google Scholar] [CrossRef]
- Putzenlechner, B.; Koal, P.; Kappas, M.; Löw, M.; Mundhenk, P.; Tischer, A.; Wernicke, J.; Koukal, T. Towards Precision Forestry: Drought Response from Remote Sensing-Based Disturbance Monitoring and Fine-Scale Soil Information in Central Europe. Sci. Total Environ. 2023, 880, 163114. [Google Scholar] [CrossRef] [PubMed]
- Ziesak, M. Precision Forestry-An Overview on the Current Status of Precision Forestry. A Literature Review. In Proceedings of the Precision Forestry in Plantations, Semi-Natural and Natural Forests, IUFRO Precision Forestry Conference Technical University, Munich, Germany, 5–10 March 2006; pp. 5–10. [Google Scholar]
- David, R.M.; Rosser, N.J.; Donoghue, D.N.M. Improving above Ground Biomass Estimates of Southern Africa Dryland Forests by Combining Sentinel-1 SAR and Sentinel-2 Multispectral Imagery. Remote Sens. Environ. 2022, 282, 113232. [Google Scholar] [CrossRef]
- Tian, Y.; Huang, H.; Zhou, G.; Zhang, Q.; Tao, J.; Zhang, Y.; Lin, J. Aboveground Mangrove Biomass Estimation in Beibu Gulf Using Machine Learning and UAV Remote Sensing. Sci. Total Environ. 2021, 781, 146816. [Google Scholar] [CrossRef]
- Xu, D.; Wang, H.; Xu, W.; Luan, Z.; Xu, X. LiDAR Applications to Estimate Forest Biomass at Individual Tree Scale: Opportunities, Challenges and Future Perspectives. Forests 2021, 12, 550. [Google Scholar] [CrossRef]
- Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.-J.; Tiede, D.; Seifert, T. UAV-Based Forest Health Monitoring: A Systematic Review. Remote Sens. 2022, 14, 3205. [Google Scholar] [CrossRef]
- Haghighian, F.; Yousefi, S.; Keesstra, S. Identifying Tree Health Using Sentinel-2 Images: A Case Study on Tortrix Viridana L. Infected Oak Trees in Western Iran. Geocarto Int. 2022, 37, 304–314. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, D.; Cao, Y.; Zhang, L.; Peng, H.; Wang, K.; Xie, H.; Wang, C. An Integrated Remote Sensing and Model Approach for Assessing Forest Carbon Fluxes in China. Sci. Total Environ. 2022, 811, 152480. [Google Scholar] [CrossRef] [PubMed]
- Latterini, F.; Stefanoni, W.; Venanzi, R.; Tocci, D.; Picchio, R. GIS-AHP Approach in Forest Logging Planning to Apply Sustainable Forest Operations. Forests 2022, 13, 484. [Google Scholar] [CrossRef]
- Marčeta, D.; Petković, V.; Ljubojević, D.; Potočnik, I. Harvesting System Suitability as Decision Support in Selection Cutting Forest Management in Northwest Bosnia and Herzegovina. Croat. J. For. Eng. 2020, 41, 251–265. [Google Scholar] [CrossRef]
- Sterenczak, K.; Moskalik, T. Use of LIDAR-Based Digital Terrain Model and Single Tree Segmentation Data for Optimal Forest Skid Trail Network. IForest 2015, 8, 661–667. [Google Scholar] [CrossRef]
- Picchio, R.; Latterini, F.; Mederski, P.S.; Tocci, D.; Venanzi, R.; Stefanoni, W.; Pari, L. Applications of GIS-Based Software to Improve the Sustainability of a Forwarding Operation in Central Italy. Sustainability 2020, 12, 5716. [Google Scholar] [CrossRef]
- Görgens, E.B.; Mund, J.-P.; Cremer, T.; de Conto, T.; Krause, S.; Valbuena, R.; Rodriguez, L.C.E. Automated Operational Logging Plan Considering Multi-Criteria Optimization. Comput. Electron. Agric. 2020, 170, 105253. [Google Scholar] [CrossRef]
- Latterini, F.; Venanzi, R.; Tocci, D.; Picchio, R. Depth-to-Water Maps to Identify Soil Areas That Are Potentially Sensitive to Logging Disturbance: Initial Evaluations in the Mediterranean Forest Context. Land 2022, 11, 709. [Google Scholar] [CrossRef]
- Schönauer, M.; Hoffmann, S.; Maack, J.; Jansen, M.; Jaeger, D. Comparison of Selected Terramechanical Test Procedures and Cartographic Indices to Predict Rutting Caused by Machine Traffic during a Cut-to-Length Thinning Operation. Forests 2021, 12, 113. [Google Scholar] [CrossRef]
- Schönauer, M.; Prinz, R.; Väätäinen, K.; Astrup, R.; Pszenny, D.; Lindeman, H.; Jaeger, D. Spatio-Temporal Prediction of Soil Moisture Using Soil Maps, Topographic Indices and SMAP Retrievals. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 102730. [Google Scholar] [CrossRef]
- Schönauer, M.; Väätäinen, K.; Prinz, R.; Lindeman, H.; Pszenny, D.; Jansen, M.; Maack, J.; Talbot, B.; Astrup, R.; Jaeger, D. Spatio-Temporal Prediction of Soil Moisture and Soil Strength by Depth-to-Water Maps. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102614. [Google Scholar] [CrossRef]
- Suvinen, A.; Saarilahti, M. Measuring the Mobility Parameters of Forwarders Using GPS and CAN Bus Techniques. J. Terramech. 2006, 43, 237–252. [Google Scholar] [CrossRef]
- Bacescu, N.M.; Cadei, A.; Moskalik, T.; Wiśniewski, M.; Talbot, B.; Grigolato, S. Efficiency Assessment of Fully Mechanized Harvesting System through the Use of Fleet Management System. Sustainability 2022, 14, 16751. [Google Scholar] [CrossRef]
- Olivera, A.; Visser, R. Development of Forest-Yield Maps Generated from Global Navigation Satellite System (GNSS)-Enabled Harvester StanForD Files: Preliminary Concepts. N. Z. J. For. Sci. 2016, 46, 1–10. [Google Scholar] [CrossRef]
- Abbas, D.; Di Fulvio, F.; Marchi, E.; Spinelli, R.; Schmidt, M.; Bilek, T.; Han, H.S. A Proposal for an Integrated Methodological and Scientific Approach to Cost Used Forestry Machines. Croat. J. For. Eng. 2021, 42, 63–75. [Google Scholar] [CrossRef]
- Civitarese, V.; Figorilli, S.; Acampora, A.; Sperandio, G.; Assirelli, A.; Scarfone, A.; Bascietto, M. Innovative System for Monitoring and Mapping Loads in Logs Forwarding. In Proceedings of the European Biomass Conference and Exhibition Proceedings, Online, 26–29 April 2021; pp. 265–267. [Google Scholar]
- Feng, T.; Chen, S.; Feng, Z.; Shen, C.; Tian, Y. Effects of Canopy and Multi-Epoch Observations on Single-Point Positioning Errors of a GNSS in Coniferous and Broadleaved Forests. Remote Sens. 2021, 13, 2325. [Google Scholar] [CrossRef]
- Balestra, M.; Tonelli, E.; Vitali, A.; Urbinati, C.; Frontoni, E.; Pierdicca, R. Geomatic Data Fusion for 3D Tree Modeling: The Case Study of Monumental Chestnut Trees. Remote Sens. 2023, 15, 2197. [Google Scholar] [CrossRef]
- Wempe, A.M.; Keefe, R.F. Characterizing Rigging Crew Proximity to Hazards on Cable Logging Operations Using GNSS-RF: Effect of GNSS Positioning Error on Worker Safety Status. Forests 2017, 8, 357. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.F. Real-Time Positioning in Logging: Effects of Forest Stand Characteristics, Topography, and Line-of-Sight Obstructions on GNSS-RF Transponder Accuracy and Radio Signal Propagation. PLoS ONE 2018, 13, e0191017. [Google Scholar] [CrossRef]
- D’EON, R.G.; DELPARTE, D. Effects of Radio-Collar Position and Orientation on GPS Radio-Collar Performance, and the Implications of PDOP in Data Screening. J. Appl. Ecol. 2005, 42, 383–388. [Google Scholar] [CrossRef]
- Bastos, A.S.; Hasegawa, H. Behavior of GPS Signal Interruption Probability under Tree Canopies in Different Forest Conditions. Eur. J. Remote Sens. 2013, 46, 613–622. [Google Scholar] [CrossRef]
- Tarquini, S.; Vinci, S.; Favalli, M.; Doumaz, F.; Fornaciai, A.; Nannipieri, L. Release of a 10-m-Resolution DEM for the Italian Territory: Comparison with Global-Coverage DEMs and Anaglyph-Mode Exploration via the Web. Comput. Geosci. 2012, 38, 168–170. [Google Scholar] [CrossRef]
- Tarquini, S.; Isola, I.; Favalli, M.; Mazzarini, F.; Bisson, M.; Pareschi, M.T.; Boschi, E. TINITALY/01: A New Triangular Irregular Network of Italy. Ann. Geophys. 2007, 50, 407–425. [Google Scholar] [CrossRef]
- Wilson, J.P.; Gallant, J.C. Secondary Topographic Attributes. In Terrain Analysis: Principles and Applications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2000; pp. 87–131. [Google Scholar]
- De Reu, J.; Bourgeois, J.; Bats, M.; Zwertvaegher, A.; Gelorini, V.; De Smedt, P.; Chu, W.; Antrop, M.; De Maeyer, P.; Finke, P.; et al. Application of the Topographic Position Index to Heterogeneous Landscapes. Geomorphology 2013, 186, 39–49. [Google Scholar] [CrossRef]
- QGIS Development Team. Quantum GIS Version 3.28.9 Firenze. Available online: https://qgis.org/pl/site/forusers/download.html (accessed on 20 February 2024).
- R Development Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna Austria. Available online: https://www.r-project.org/ (accessed on 6 October 2023).
- Bates, D.; Mächler, M.; Bolker, B.; Walker, S. Fitting Linear Mixed-Effects Models Using Lme4. J. Stat. Softw. 2015, 67, 48. [Google Scholar] [CrossRef]
- Fox, J.; Weisberg, S. An R Companion to Applied Regression; Sage Publications: Thousand Oaks, CA, USA, 2018; ISBN 1544336489. [Google Scholar]
- Bartoń, K. MuMIn: Multi-Model Inference; R Package Version 1.47.5; Springer-Verlag: New York, NY, USA, 2023. [Google Scholar]
- Nakagawa, S.; Schielzeth, H. A General and Simple Method for Obtaining R 2 from Generalized Linear Mixed-effects Models. Methods Ecol. Evol. 2013, 4, 133–142. [Google Scholar] [CrossRef]
- Lüdecke, D. Ggeffects: Tidy Data Frames of Marginal Effects from Regression Models. J. Open Source Softw. 2018, 3, 772. [Google Scholar] [CrossRef]
- Becker, R.M.; Keefe, R.F. Development of Activity Recognition Models for Mechanical Fuel Treatments Using Consumer-Grade GNSS-RF Devices and Lidar. Forestry 2022, 95, 437–449. [Google Scholar] [CrossRef]
- Becker, R.; Keefe, R.; Anderson, N. Use of Real-Time GNSS-RF Data to Characterize the Swing Movements of Forestry Equipment. Forests 2017, 8, 44. [Google Scholar] [CrossRef]
- Lopatin, E.; Väätäinen, K.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Holmström, E.; Sikanen, L.; Nuutinen, Y.; Routa, J. Unlocking Digitalization in Forest Operations with Viewshed Analysis to Improve GNSS Positioning Accuracy. Forests 2023, 14, 689. [Google Scholar] [CrossRef]
- Tomaštík, J.; Saloň, Š.; Piroh, R. Horizontal Accuracy and Applicability of Smartphone GNSS Positioning in Forests. Forestry 2017, 90, 187–198. [Google Scholar] [CrossRef]
- Lindroos, O.; La Hera, P.; Häggström, C. Drivers of Advances in Mechanized Timber Harvesting—A Selective Review of Technological Innovation. Croat. J. For. Eng. 2017, 38, 243–258. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
| Avigliano | Bracciano | ||
|---|---|---|---|
| Elevation (m) | Average | 390 | 407 |
| Max | 397 | 425 | |
| Min | 382 | 399 | |
| Slope (%) | Average | 14.55 | 10.99 |
| Max | 25.19 | 16.6 | |
| Min | 0.76 | 5.68 | |
| Topographic position index | Average | 0.15 | 0.04 |
| Max | 1.41 | 0.50 | |
| Min | −0.35 | −0.47 | |
| Positioning error (m) | Average | 1.71 | 2.30 |
| Max | 4.80 | 5.20 | |
| Min | 0.01 | 0.01 |
| Linear Mixed Model | |||
|---|---|---|---|
| Random effects | |||
| Groups | Name | Variance | Std.Dev |
| Area | (Intercept) | 1.464 | 1.21 |
| Residual | 1.311 | 1.145 | |
| Number of observations | 130, groups | area, 2 | |
| Fixed effects | |||
| Estimate | Std.Error | t value | |
| (Intercept) | 26.693 | 7.017 | 3.804 |
| Elevation | −0.062 | 0.017 | −3.551 |
| TPI | 0.369 | 0.272 | 1.357 |
| R2m | R2c | ||
| 0.1363706 | 0.5920209 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Picchio, R.; Venanzi, R.; Bonaudo, A.; Travisani, L.; Civitarese, V.; Latterini, F. Evaluating an Innovative ICT System for Monitoring Small-Scale Forest Operations: Preliminary Tests in Mediterranean Oak Coppices. Sustainability 2024, 16, 4629. https://doi.org/10.3390/su16114629
Picchio R, Venanzi R, Bonaudo A, Travisani L, Civitarese V, Latterini F. Evaluating an Innovative ICT System for Monitoring Small-Scale Forest Operations: Preliminary Tests in Mediterranean Oak Coppices. Sustainability. 2024; 16(11):4629. https://doi.org/10.3390/su16114629
Chicago/Turabian StylePicchio, Rodolfo, Rachele Venanzi, Aurora Bonaudo, Lorenzo Travisani, Vincenzo Civitarese, and Francesco Latterini. 2024. "Evaluating an Innovative ICT System for Monitoring Small-Scale Forest Operations: Preliminary Tests in Mediterranean Oak Coppices" Sustainability 16, no. 11: 4629. https://doi.org/10.3390/su16114629