
Continuous Power Management of Decentralized DC Microgrid Based on Transitional Operation Modes under System Uncertainty and Sensor Failure

 , , , and
, , , and 
Abstract
1. Introduction
- (i)
- The proposed control strategy based on the decentralized DCMG configuration achieves continuous power management based on the transitional operation modes under system uncertainty and sensor failure, which greatly improves the system reliability. In addition, both voltage regulation and power sharing are accomplished by using only the primary controller to reduce the computational burden.
- (ii)
- Even in the presence of uncertainties such as grid disconnection, electricity price changes, power variation in the distributed generation, and critical battery status, the proposed decentralized DCMG system ensures voltage stabilization and power balance by using the transitional operation modes without DCLs. Once an uncertain condition occurs, the DCV levels are temporarily adjusted to a proper level in transitional operation modes, and then, the power agents determine their operation modes based on the DCV levels.
- (iii)
- The DCV sensor fault detection algorithm continuously monitors the abnormality of the DCV sensor in the proposed scheme to reinforce the DCMG system’s reliability. Under normal conditions without DCV sensor failure, the proposed scheme achieves both voltage regulation and power balance. If DCV sensor failure happens in a power agent, the proposed control mode decision algorithm properly changes the power agent operation into current control mode for seamless power management. In addition, the proposed scheme can stably work even under multiple DCV sensor faults in more than one power agent at the same time if there exists a normal DCV sensor in a DCMG system.
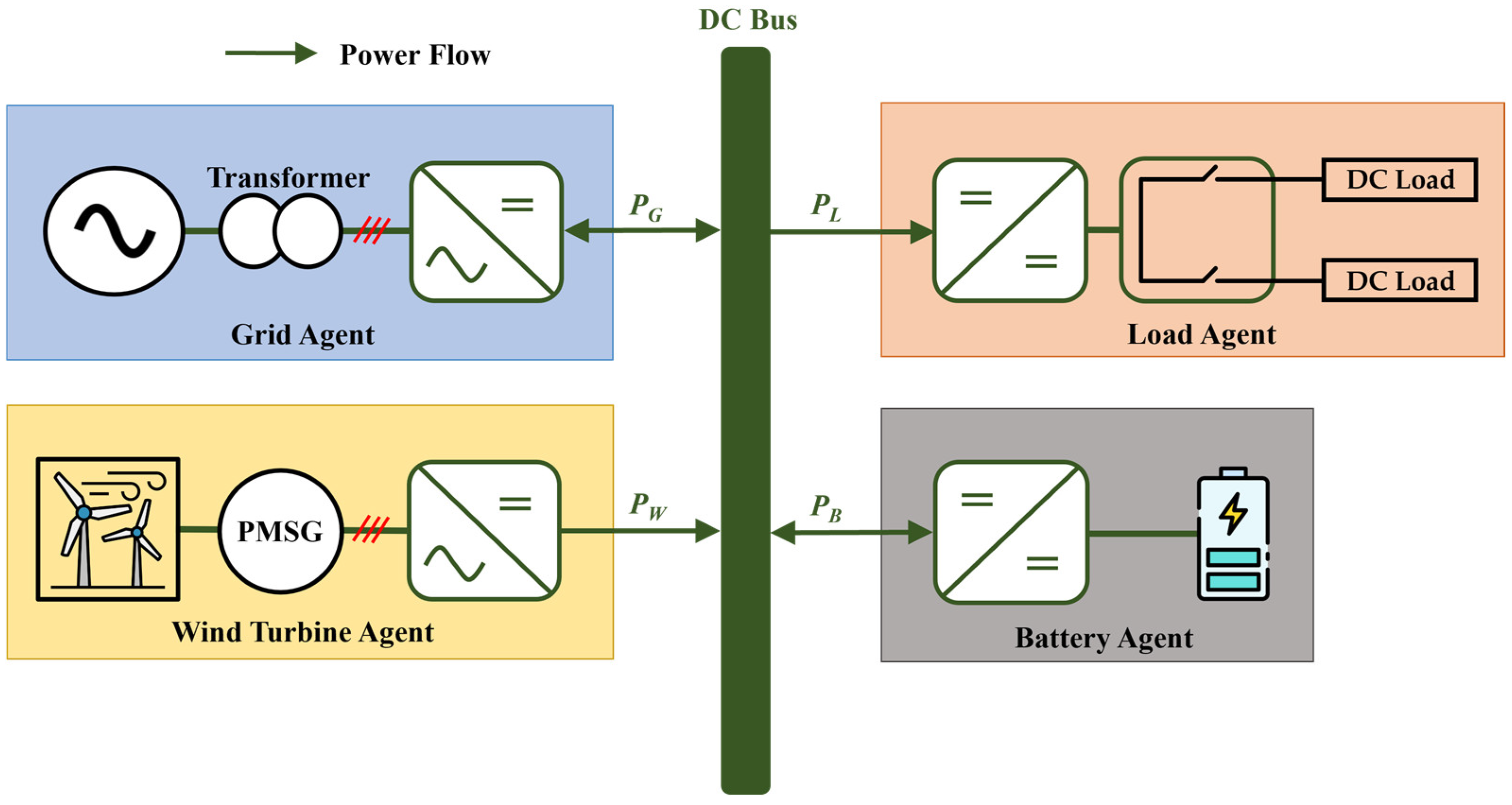
2. System Configuration of a DCMG and Decentralized Control Strategy
3. Control Strategy and Transition Operations of Power Agents under Emergency Conditions
3.1. Control Strategy of Power Agents
3.2. Control Strategy under DCV Sensor Fault
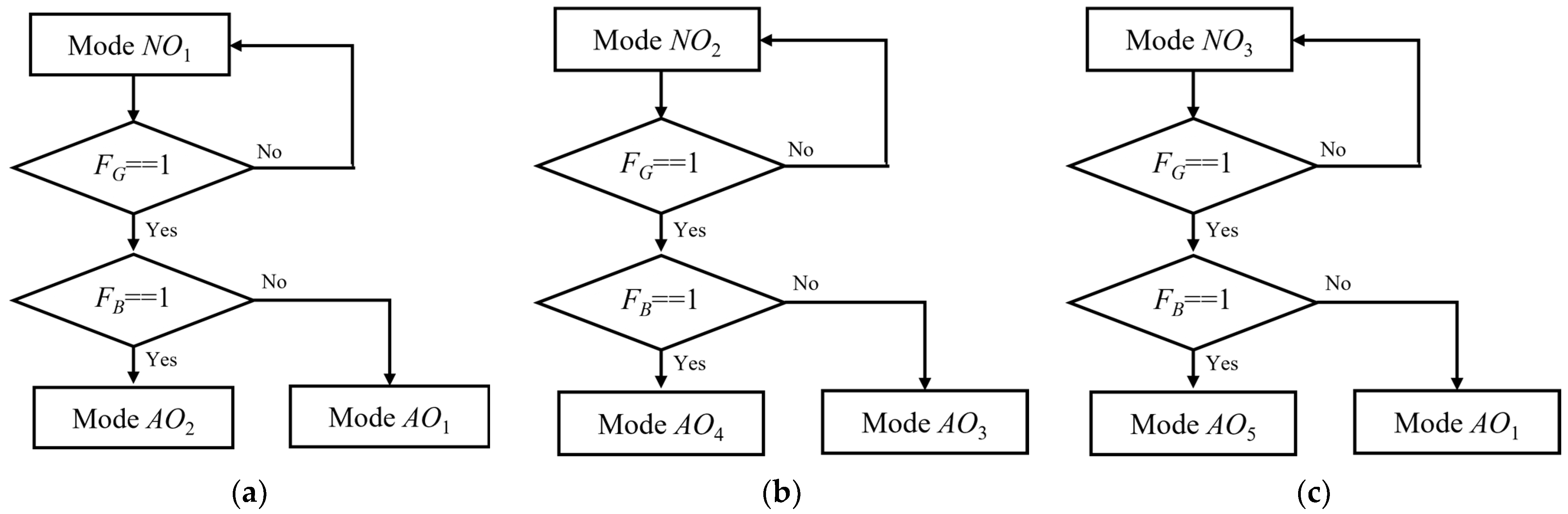
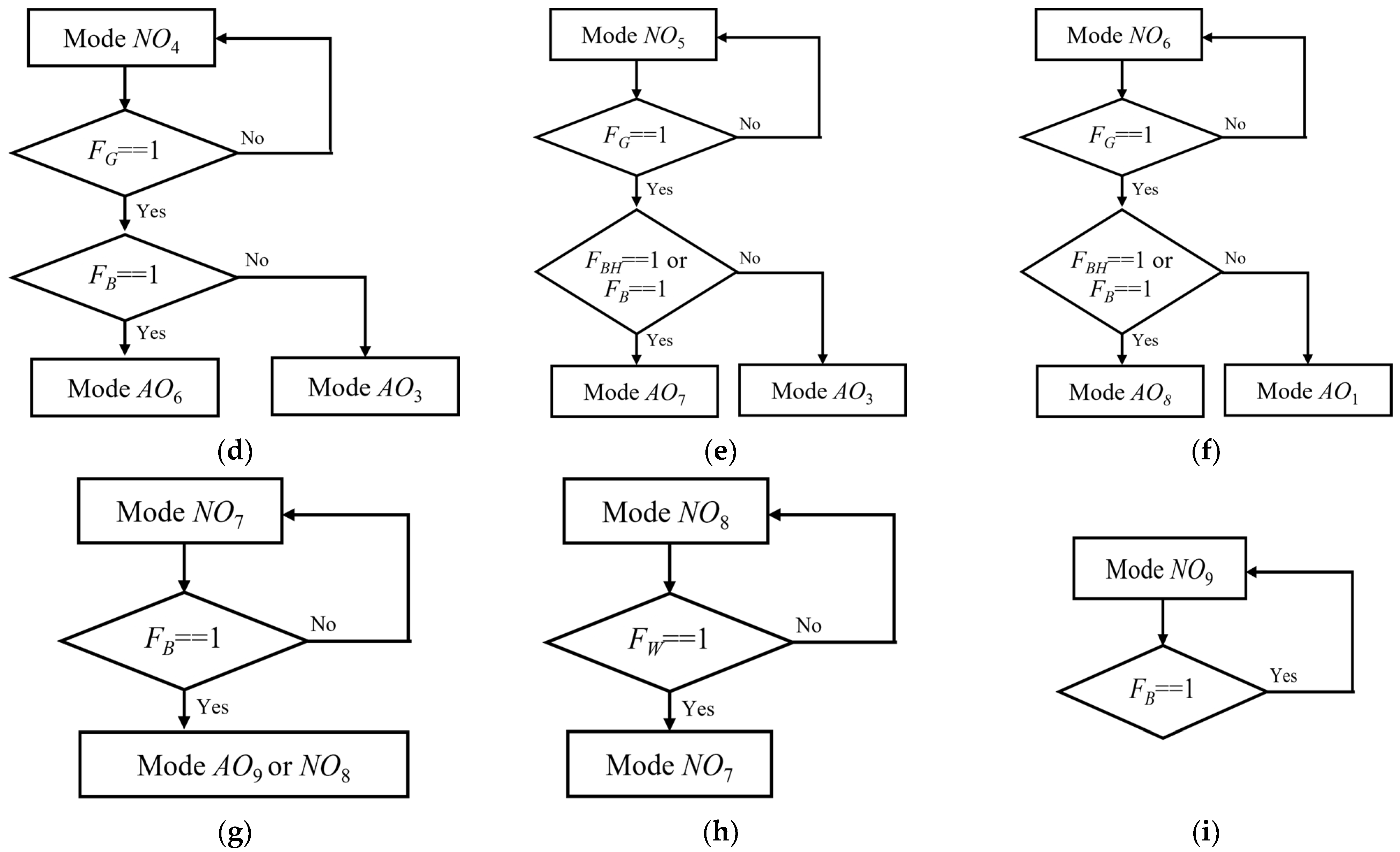
3.3. Transitional Operation Modes in Power Agents
4. Simulation Tests
4.1. Transition from Grid-Connected Mode to IM under DCV Sensor Fault
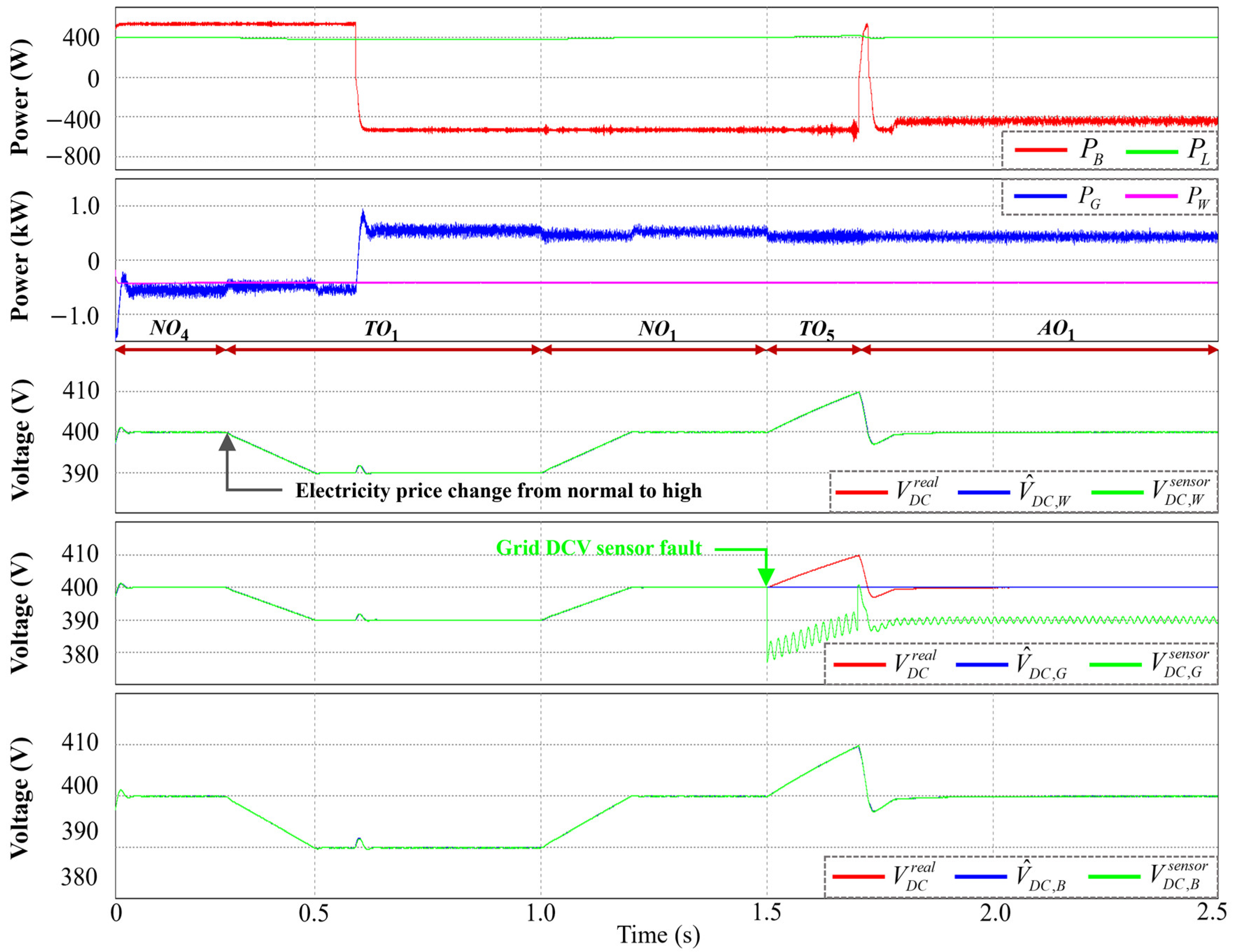
4.2. Transition from Normal to High Electricity Price Conditions under DCV Sensor Fault
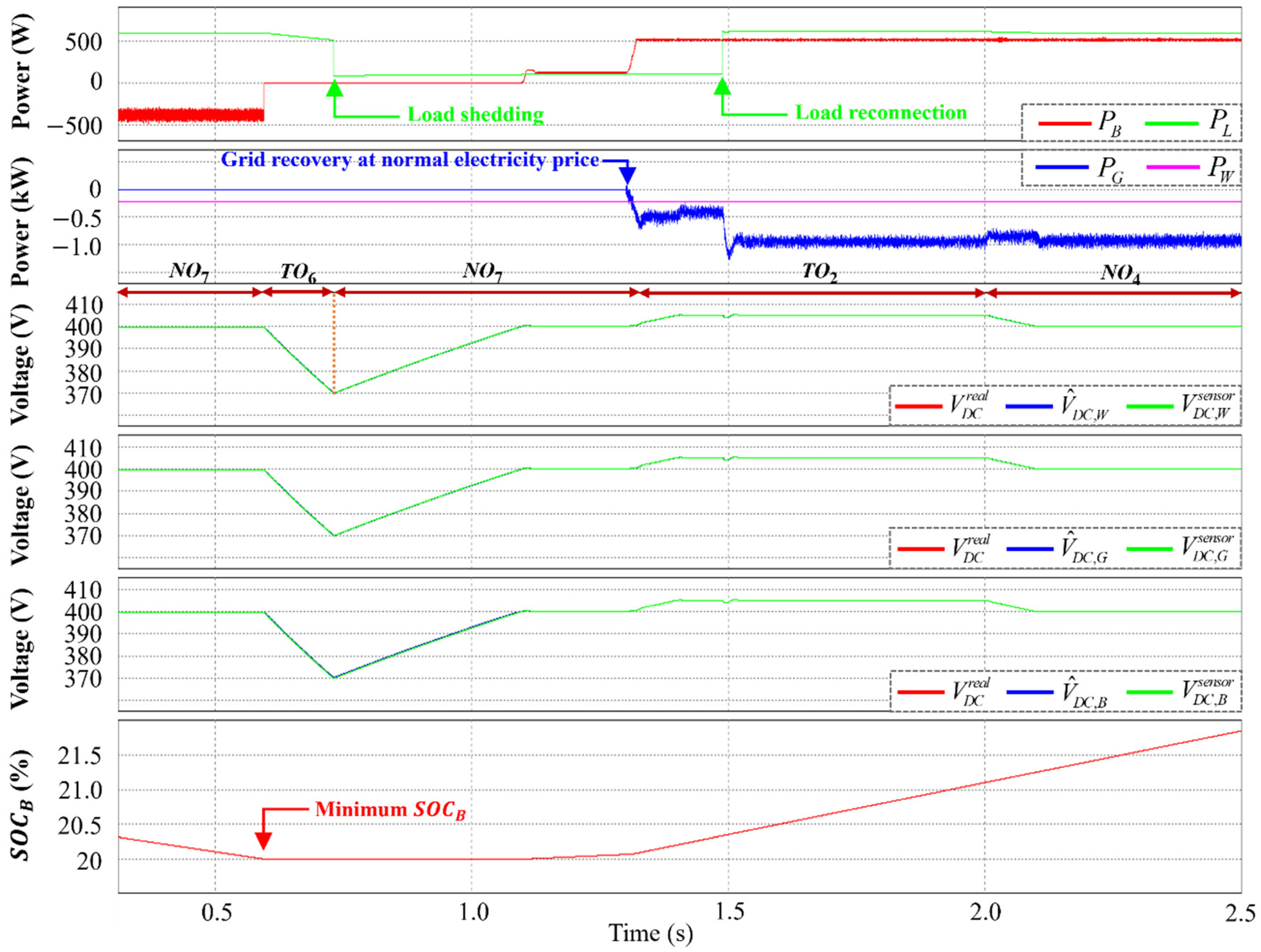
4.3. Grid Recovery with High Electricity Price Condition under DCV Sensor Fault
4.4. Transition of Electricity Price Condition from High to Normal under DCV Sensor Fault
4.5. Case of Minimum Battery SOC Level
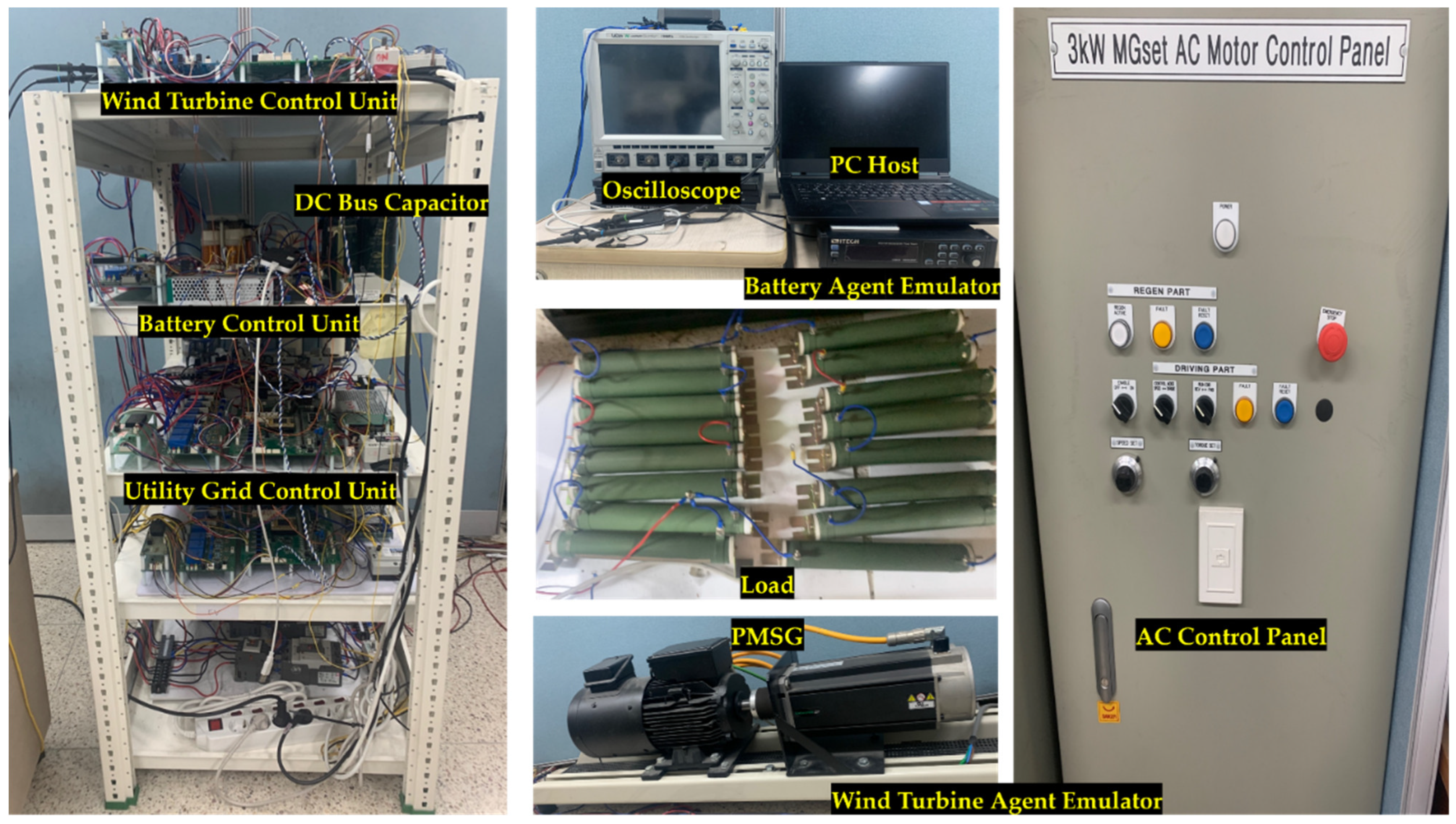
5. Experimental Results
5.1. Transition of Electricity Price from Normal to High in GCM
5.2. GCM under DCV Sensor Fault
5.3. Transition between GCM and IM
5.4. Test with IM under Minimum Battery SOC Level
5.5. Test with IM under DCV Sensor Fault
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ACMG | AC microgrid |
| BCCMchar | Battery current control mode by charging operation |
| BCCMdis | Battery current control mode by discharging operation |
| BVCM | Battery voltage control mode |
| DCMG | DC microgrid |
| DCL | Digital communication line |
| DCV | DC bus voltage |
| ESS | Energy storage system |
| GCCMcon | Grid agent current control mode by converter operation |
| GCCMinv | Grid agent current control mode by inverter operation |
| IM | islanded mode |
| LCL | Inductive–Capacitive–Inductive |
| MPPT | Permanent magnet synchronous generator |
| PI | Proportional–integral |
| PMSG | Permanent magnet synchronous generator |
| PV | Photovoltaic |
| SOC | State of charge |
| VCM | Voltage control mode of wind turbine |
| AOm | Additional steady-state operation mode, m = 1, 2, 3,…,9 |
| c | Counter |
| Ci | Capacitor of agent i |
| cmax | Specified threshold of the counter |
| Small positive value of agent i | |
| Difference between VDC,i and | |
| Specified threshold value | |
| FB | Flag variable to denote the DCV sensor failure in battery agent |
| FW | Flag variable to denote the DCV sensor failure in wind turbine agent |
| FG | Flag variable to denote the DCV sensor failure in grid agent |
| Fmode | Control mode flag |
| Ffault | Fault flag |
| Converter output current of agent i | |
| Reference current of agent i | |
| Previous value of | |
| Li | Inductor of agent i |
| NOm | Normal operation mode, m = 1, 2, 3,…,9 |
| Ni | Observer gain |
| PB | Power flow of the battery agent |
| PG | Power flow of the grid agent |
| PL | Power flow of the load agent |
| PW | Power flow of the wind turbine agent |
| RL | Total equivalent resistance |
| RLi | Virtual resistance of agent i |
| SOCB | State of charge of the battery |
| Maximum SOC level of the battery | |
| Minimum SOC level of the battery | |
| TOm | Transition operation mode, m = 1, 2, 3,…,6 |
| Vdc,i | DCV measured from the sensor of agent i |
| DCV estimated from the observer of agent i | |
| Previous value of | |
| Vnom | Nominal DCV |
| VH1 | First level of high DCV |
| VH2 | Second level of high DCV |
| VH3 | Third level of high DCV |
| VL1 | First level of low DCV |
| VL2 | Second level of low DCV |
| VL3 | Third level of low DCV |
References
- Ogunrinde, O.; Shittu, E.; Dhanda, K.K. Investing in renewable energy: Reconciling regional policy with renewable energy growth. IEEE Eng. Manag. Rev. 2018, 46, 103–111. [Google Scholar] [CrossRef]
- Qazi, A.; Hussain, F.; Rahim, N.A.; Hardaker, G.; Alghazzawi, D.; Shaban, K.; Haruna, K. Towards sustainable energy: A systematic review of renewable energy sources, technologies, and public opinions. IEEE Access 2019, 7, 63837–63851. [Google Scholar] [CrossRef]
- Dugan, R.C. Challenges in considering distributed generation in the analysis and design of distribution system. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburg, PA, USA, 20–24 July 2008. [Google Scholar]
- Huang, S.-J.; Hsieh, C.-W.; Wan, H.-H. Confirming the permissible capacity of distributed generation for grid-connected distribution feeders. IEEE Trans. Power Syst. 2015, 30, 540–541. [Google Scholar] [CrossRef]
- Su, S.-Y.; Lu, C.-N.; Chang, R.-F.; Guillermo, G.-A. Distributed generation interconnection planning: A wind power case study. IEEE Trans. Smart Grid 2011, 2, 181–188. [Google Scholar] [CrossRef]
- Mohanty, S.; Bhanja, A.; Gautam, S.P.; Chittathuru, D.; Dash, S.K.; Mangaraj, M.; Chinthaginjala, R.; Alamri, A.M. Review of a comprehensive analysis of planning, functionality, control, and protection for direct current microgrids. Sustainability 2023, 15, 15405. [Google Scholar] [CrossRef]
- Cabana-Jiménez, K.; Candelo-Becerra, J.E.; Sousa Santos, V. Comprehensive analysis of microgrids configurations and topologies. Sustainability 2022, 14, 1056. [Google Scholar] [CrossRef]
- Kumar, D.; Zare, F.; Ghosh, A. DC microgrid technology: System architectures, AC grid interfaces, grounding schemes, power quality, communication networks, applications, and standardizations aspects. IEEE Access 2017, 5, 12230–12256. [Google Scholar] [CrossRef]
- Santoro, D.; Delmonte, N.; Simonazzi, M.; Toscani, A.; Rocchi, N.; Sozzi, G.; Cova, P.; Menozzi, R. Local power distribution—A review of nanogrid architectures, control strategies, and converters. Sustainability 2023, 15, 2759. [Google Scholar] [CrossRef]
- Keshavarzi, D.; Farjah, E.; Ghanbari, T. Hybrid DC circuit breaker and fault current limiter with optional interruption capability. IEEE Trans. Power Electron. 2018, 33, 2330–2338. [Google Scholar] [CrossRef]
- Lotfi, H.; Khodaei, A. AC versus DC microgrid planning. IEEE Trans. Smart Grid 2017, 8, 296–304. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, Y.; Lin, X.; Li, C.; Cai, Z.; Yang, P. Optimal sizing of PV and BESS for a smart household considering different price mechanisms. IEEE Access 2018, 6, 41050–41059. [Google Scholar] [CrossRef]
- Al-Ismail, F.S. DC microgrid planning, operation, and control: A comprehensive review. IEEE Access 2021, 9, 36154–36172. [Google Scholar] [CrossRef]
- Saleh, M.; Esa, Y.; Hariri, M.E.; Mohamed, A. Impact of information and communication technology limitations on microgrid operation. Energies 2019, 12, 2926. [Google Scholar] [CrossRef]
- Abbasi, M.; Abbasi, E.; Li, L.; Aguilera, R.P.; Lu, D.; Wang, F. Review on the microgrid concept, structures, components, communication systems, and control methods. Energies 2023, 16, 484. [Google Scholar] [CrossRef]
- Van Nguyen, T.; Kim, K.-H. Power flow control strategy and reliable DC-link voltage restoration for DC microgrid under grid fault conditions. Sustainability 2019, 11, 3781. [Google Scholar] [CrossRef]
- Mehdi, M.; Kim, C.-H.; Saad, M. Robust centralized control for DC islanded microgrid considering communication network delay. IEEE Access 2020, 8, 77765–77778. [Google Scholar] [CrossRef]
- Yu, Y.; Liu, G.-P.; Huang, Y.; Guerrero, J.M. Distributed data-driven secondary regulation for the conflict between voltage recovery and accurate current sharing in DC microgrids. IEEE Trans. Power Electron. 2023, 38, 9617–9634. [Google Scholar] [CrossRef]
- Espina, E.; Llanos, J.; Burgos-Mellado, C.; Cárdenas-Dobson, R.; Martínez-Gómez, M.; Sáez, D. Distributed control strategies for microgrids: An overview. IEEE Access 2020, 8, 193412–193448. [Google Scholar] [CrossRef]
- Li, Q.; Chen, F.; Chen, M.; Guerrero, J.M.; Abbott, D. Agent-based decentralized control method for islanded microgrids. IEEE Trans. Smart Grid 2016, 7, 637–649. [Google Scholar] [CrossRef]
- Bani-Ahmed, A.; Rashidi, M.; Nasiri, A.; Hosseini, H. Reliability analysis of a decentralized microgrid control architecture. IEEE Trans. Smart Grid 2019, 10, 3910–3918. [Google Scholar] [CrossRef]
- Gu, Y.; Xiang, X.; Li, W.; He, X. Mode-adaptive decentralized control for renewable DC microgrid with enhanced reliability and flexibility. IEEE Trans. Power Electron. 2014, 29, 5072–5080. [Google Scholar] [CrossRef]
- Wang, C.; Duan, J.; Fan, B.; Yang, Q.; Liu, W. Decentralized high-performance control of DC microgrids. IEEE Trans. Smart Grid 2019, 10, 3355–3363. [Google Scholar] [CrossRef]
- Xia, Y.; Yu, M.; Tao, X.; Peng, Y.; Wei, W. Decentralized control for parallel bidirectional power converters of a grid-connected DC microgrid. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016. [Google Scholar]
- Xu, L.; Chen, D. Control and operation of a DC microgrid with variable generation and energy storage. IEEE Trans. Power Delivery 2011, 26, 2513–2522. [Google Scholar] [CrossRef]
- Chen, D.; Xu, L.; Yao, L. DC voltage variation based autonomous control of DC microgrids. IEEE Trans. Power Delivery 2013, 28, 637–648. [Google Scholar] [CrossRef]
- Tahim, A.P.N.; Pagano, D.J.; Lenz, E.; Stramosk, V. Modeling and stability analysis of islanded DC microgrids under droop control. IEEE Trans. Power Electron. 2015, 30, 4597–4607. [Google Scholar] [CrossRef]
- Li, X.; Guo, L.; Zhang, S.; Wang, C.; Li, Y.W.; Chen, A.; Feng, Y. Observer-based DC voltage droop and current feed-forward control of a DC microgrid. IEEE Trans. Smart Grid 2018, 9, 5207–5216. [Google Scholar] [CrossRef]
- Gao, F.; Bozhko, S.; Costabeber, A.; Patel, C.; Wheeler, P.; Hill, C.I.; Asher, G. Comparative stability analysis of droop control approaches in voltage-source-converter-based DC microgrids. IEEE Trans. Power Electron. 2017, 32, 2395–2415. [Google Scholar] [CrossRef]
- Jabbar, M.A.M.; Tran, D.T.; Kim, K.-H. Decentralized power flow control strategy using transition operations of DC-bus voltage for detection of uncertain DC microgrid operations. Sustainability 2023, 15, 11635. [Google Scholar] [CrossRef]
- Habibullah, A.F.; Kim, K.-H. Decentralized power management of DC microgrid based on adaptive droop control with constant voltage regulation. IEEE Access 2022, 10, 129490–129504. [Google Scholar] [CrossRef]
- Tran, D.T.; Kim, M.; Kim, K.-H. Seamless power management for decentralized DC microgrid under voltage sensor faults. IEEE Access 2023, 11, 74627–74640. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Moussavi, S.Z. Distributed resilient adaptive control of islanded microgrids under sensor/actuator faults. IEEE Trans. Smart Grid 2020, 11, 2699–2708. [Google Scholar] [CrossRef]
- Oritz-matos, L.; Zea, L.B.G.; Gonzalez-sanchez, J.W. A methodology of sensor fault-tolerant control on a hierarchical control for hybrid microgrids. IEEE Access 2023, 11, 58078–58098. [Google Scholar] [CrossRef]
- Chandra, M.V.S.S.; Mohapatro, S. Hybrid sensor fault tolerant control of low voltage DC microgrid. IEEE Trans. Ind. Appl 2024, 60, 1705–1715. [Google Scholar] [CrossRef]
- Kong, X.; Cai, B.; Liu, Y.; Zhu, H.; Yang, C.; Gao, C.; Liu, Y.; Liu, Z.; Ji, R. Fault diagnosis methodology of redundant closed-loop feedback control systems: Subsea blowout preventer system as a case study. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 1618–1629. [Google Scholar] [CrossRef]
- Jessen, K.; Soltani, M.; Hajizadeh, A. Sensor fault detection for line regulating converters supplying constant power loads in DC microgrids. In Proceedings of the 2020 IEEE 11th International Symposium on Power Electronics for Distributed Generation Systems, Dubrovnik, Croatia, 28 September–1 October 2020. [Google Scholar]
- Huang, M.; Ding, L.; Li, W.; Chen, C.Y.; Liu, Z. Distributed observer-based H∞ fault-tolerant control for DC microgrids with sensor fault. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 1659–1670. [Google Scholar] [CrossRef]
- Padhilah, F.A.; Kim, K.-H. A power flow control strategy for hybrid control architecture of DC microgrid under unreliable grid connection considering electricity price constraint. Sustainability 2020, 12, 7628. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Battery Agent | Wind Turbine Agent | Grid Agent | Load Agent |
|---|---|---|---|---|
| NO1 | BCCMdis | MPPT | GVCMinv | Normal |
| NO2 | BCCMdis | MPPT | GVCMcon | Normal |
| NO3 | BCCMchar | MPPT | GVCMinv | Normal |
| NO4 | BCCMchar | MPPT | GVCMcon | Normal |
| NO5 | IDLE | MPPT | GVCMcon | Normal |
| NO6 | IDLE | MPPT | GVCMinv | Normal |
| NO7 | BVCM | MPPT | Fault | Normal |
| NO8 | BCCMchar | VCM | Fault | Normal |
| NO9 | IDLE | VCM | Fault | Normal |
| Mode | Battery Agent | Wind Turbine Agent | Grid Agent | Load Agent |
|---|---|---|---|---|
| AO1 | BVCM | MPPT | GCCMinv | Normal |
| AO2 | BCCMdis | VCM | GCCMinv | Normal |
| AO3 | BVCM | MPPT | GCCMcon | Normal |
| AO4 | BCCMdis | VCM | GCCMcon | Normal |
| AO5 | BCCMchar | VCM | GCCMinv | Normal |
| AO6 | BCCMchar | VCM | GCCMcon | Normal |
| AO7 | IDLE | VCM | GCCMcon | Normal |
| AO8 | IDLE | VCM | GCCMinv | Normal |
| AO9 | BCCMdis | VCM | Fault | Normal |
| Mode | Grid Agent | Wind Turbine Agent | Battery Agent | Agent Action |
|---|---|---|---|---|
| TO1 | ✔ |
| ||
| TO2 | ✔ |
| ||
| TO3 | ✔ | ✔ |
| |
| TO4 | ✔ | ✔ |
| |
| TO5 | ✔ |
| ||
| TO6 | ✔ | ✔ | ✔ |
|
| Power Agents | Parameters | Values |
|---|---|---|
| Battery | 20% | |
| 90% | ||
| Maximum discharging power | −540 W | |
| Maximum charging power | 540 W | |
| Maximum voltage | 180 V | |
| Rated capacity | 25 Ah | |
| Converter filter inductance, L | 7 mH | |
| Grid | Transformer, Y/Δ | 380/220 V |
| Grid frequency | 60 Hz | |
| Grid voltage | 220 V | |
| LCL filter | 1.7 mH/4.5 μF/1.7 mH | |
| Wind turbine | PMSG number of poles | 6 |
| PMSG inertia | 0.111 kgm2 | |
| PMSG stator resistance | 0.64 Ω | |
| PMSG dq-axis inductance | 0.82 mH | |
| PMSG flux linkage | 0.18 Wb | |
| Converter filter inductance | 7 mH | |
| Load | Load 1 | 200 W |
| Load 2 | 200 W | |
| Load 3 | 200 W | |
| Priority: load 1 > load 2 > load 3 | - | |
| DC bus | Nominal DCV (Vnom) | 400 V |
| First level of high DCV (VH1) | 405 V | |
| Second level of high DCV (VH2) | 410 V | |
| Third level of high DCV (VH3) | 415 V | |
| First level of low DCV (VL1) | 390 V | |
| Second level of low DCV (VL2) | 380 V | |
| Third level of low DCV (VL3) | 370 V | |
| Capacitance | 4 mF |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jo, S.-B.; Tran, D.T.; Jabbar, M.A.M.; Kim, M.; Kim, K.-H. Continuous Power Management of Decentralized DC Microgrid Based on Transitional Operation Modes under System Uncertainty and Sensor Failure. Sustainability 2024, 16, 4925. https://doi.org/10.3390/su16124925
Jo S-B, Tran DT, Jabbar MAM, Kim M, Kim K-H. Continuous Power Management of Decentralized DC Microgrid Based on Transitional Operation Modes under System Uncertainty and Sensor Failure. Sustainability. 2024; 16(12):4925. https://doi.org/10.3390/su16124925
Chicago/Turabian StyleJo, Seong-Bae, Dat Thanh Tran, Muhammad Alif Miraj Jabbar, Myungbok Kim, and Kyeong-Hwa Kim. 2024. "Continuous Power Management of Decentralized DC Microgrid Based on Transitional Operation Modes under System Uncertainty and Sensor Failure" Sustainability 16, no. 12: 4925. https://doi.org/10.3390/su16124925
APA StyleJo, S.-B., Tran, D. T., Jabbar, M. A. M., Kim, M., & Kim, K.-H. (2024). Continuous Power Management of Decentralized DC Microgrid Based on Transitional Operation Modes under System Uncertainty and Sensor Failure. Sustainability, 16(12), 4925. https://doi.org/10.3390/su16124925