
Study on Aerodynamic Performance and Wake Characteristics of a Floating Offshore Wind Turbine in Wind–Wave Coupling Field
 , ,
, ,  ,
,
Abstract
:1. Introduction
2. Numerical Configurations
2.1. Wind Turbine Geometry
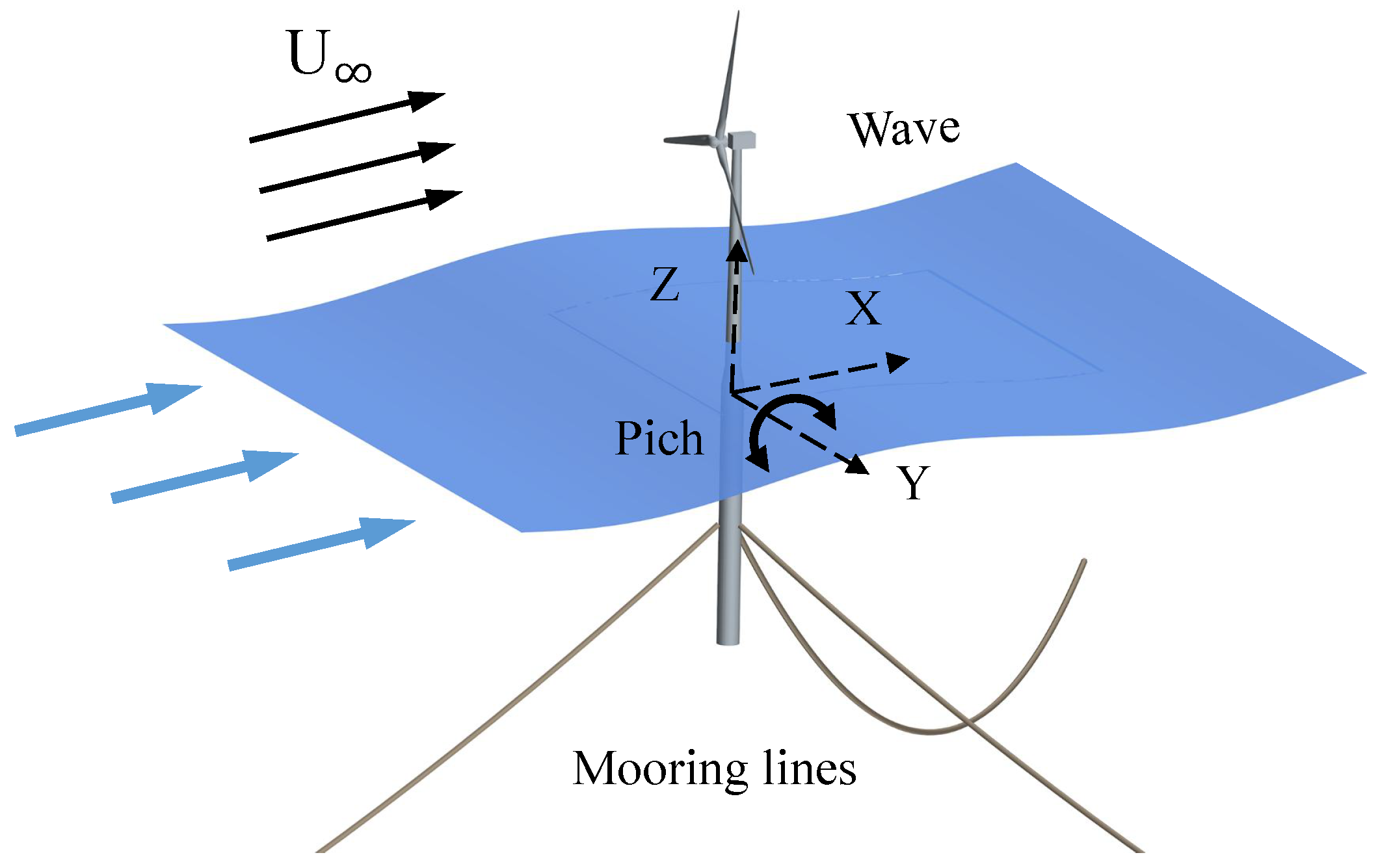
2.2. Governing Equations and Boundary Conditions
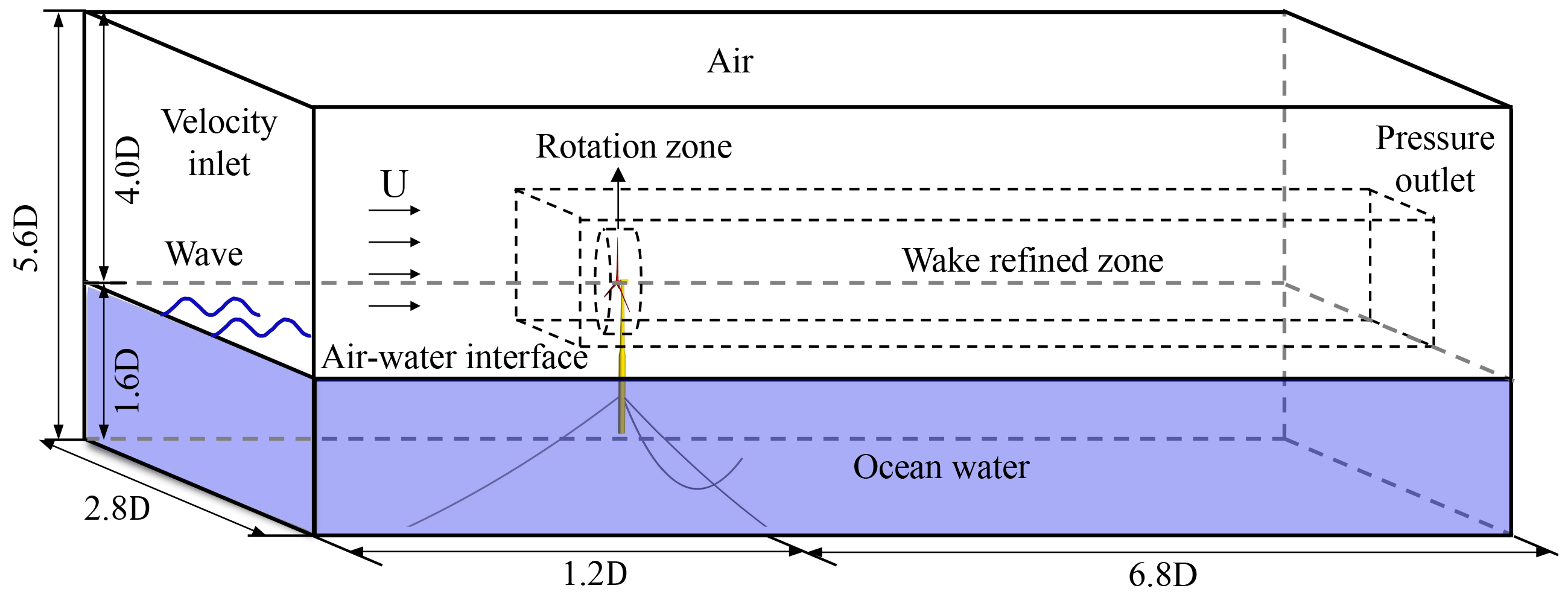
2.3. Computational Domain and Grid Topology
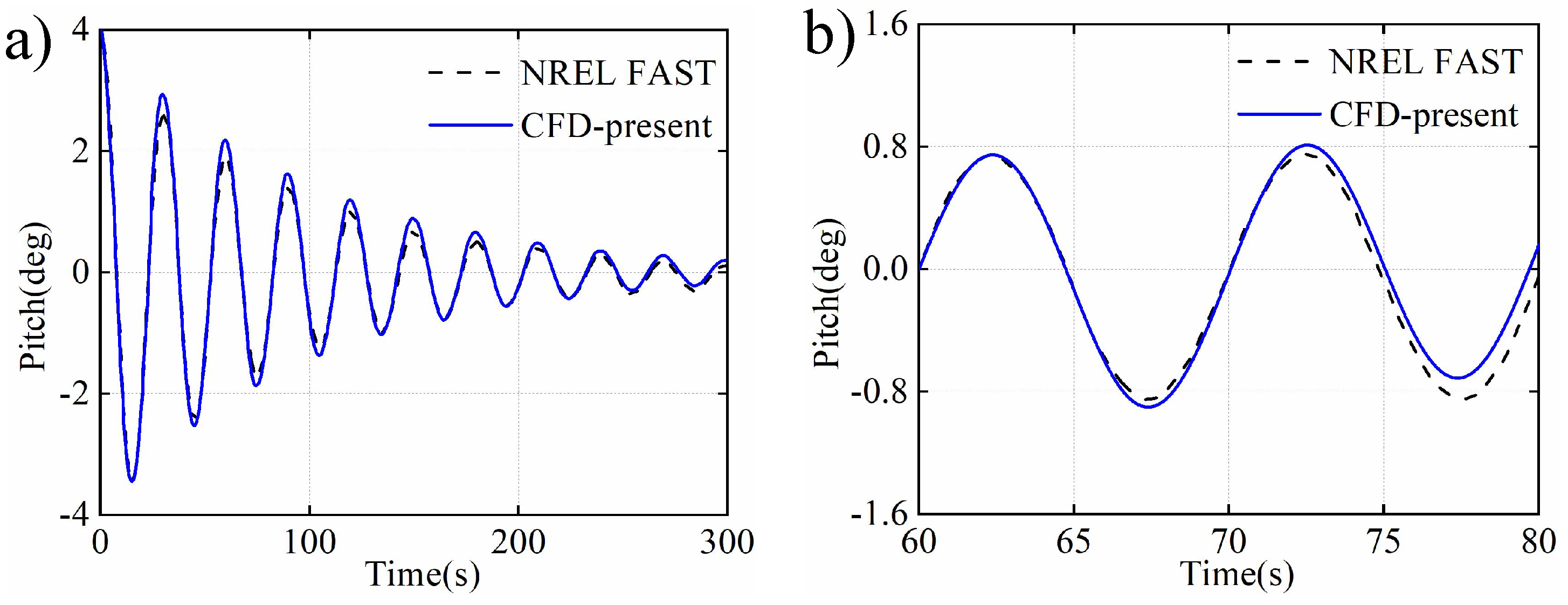
2.4. Numerical Validation
3. Results and Discussion
3.1. Aerodynamic Performance
3.2. Wake Characteristics
4. Remarks and Conclusions
- (1)
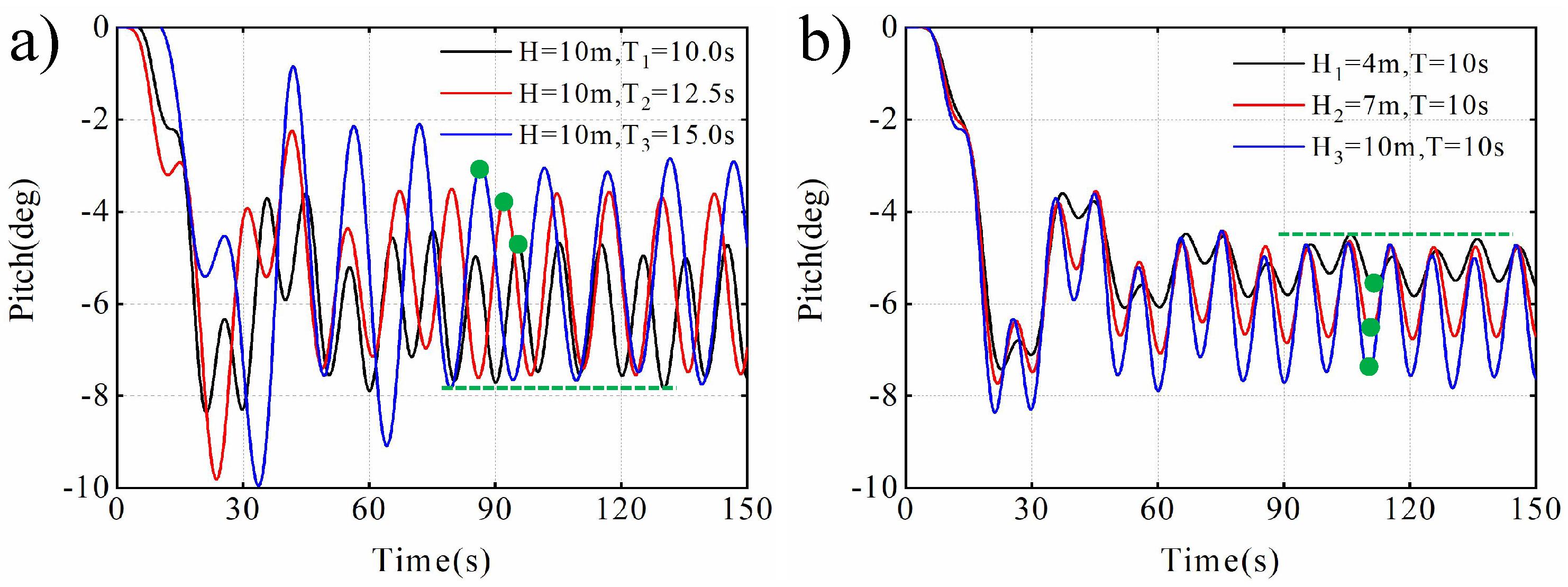
- The effect of wave period on the amplitude and period of pitch motion of a floating platform was substantial, although it did not impact the maximum angle of pitch motion at the same wave height. On the other hand, changes in wave height had a considerable impact on both the amplitude and maximum angle of pitch motion at the same wave period.
- (2)
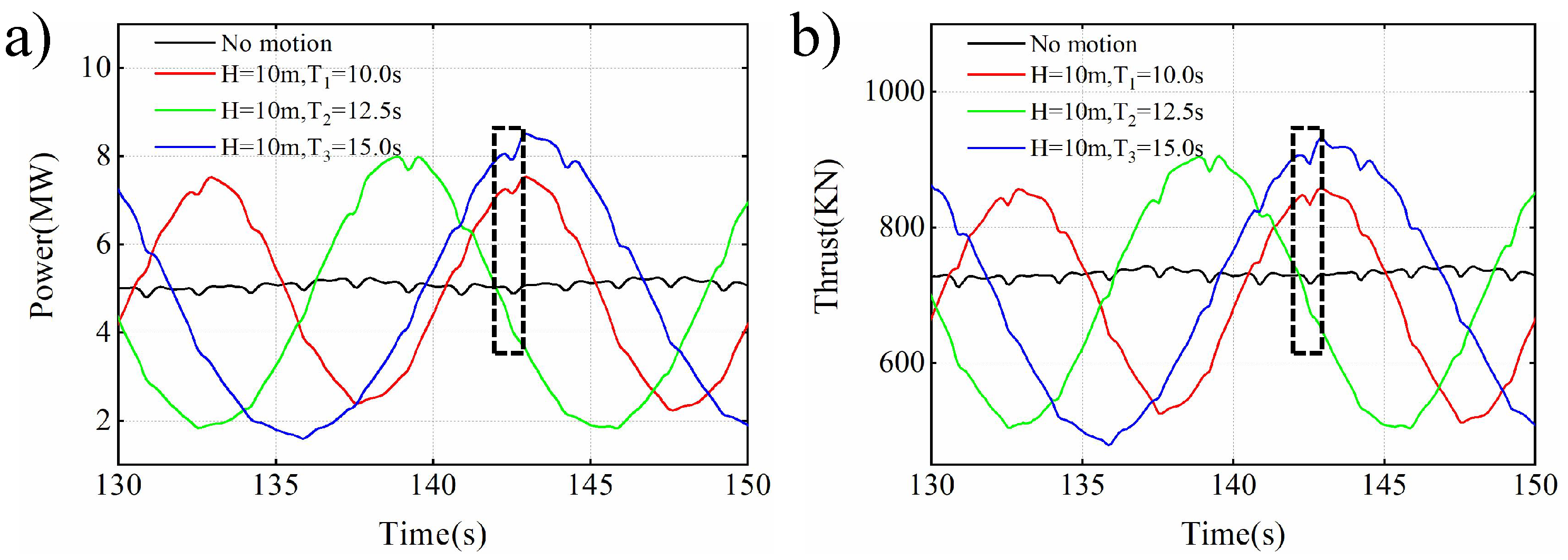
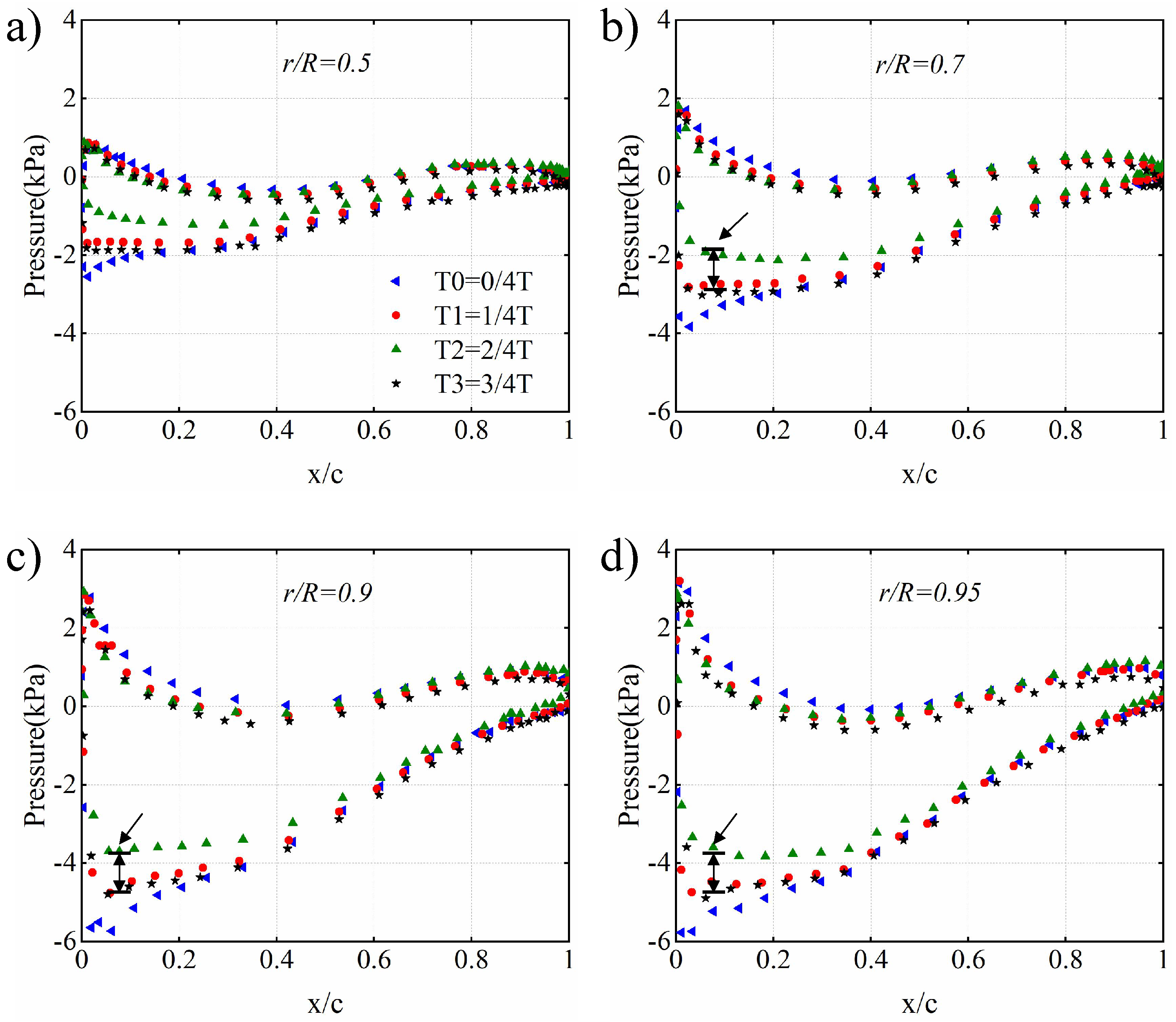
- As the wave period grows longer, the wind turbine’s added speed diminishes, as does the pitch speed of the blade, and the weakening of unsteady flow separation on the blade surface enhances aerodynamic performance. However, due to wind and wave coupling, the floating wind turbine tilts at a specific angle relative to the incoming flow direction, resulting in wave-induced pitch motion that reduces the turbine’s power output to some extent. Typically, as wave height rises, the wind turbine’s average power output tends to increase.
- (3)
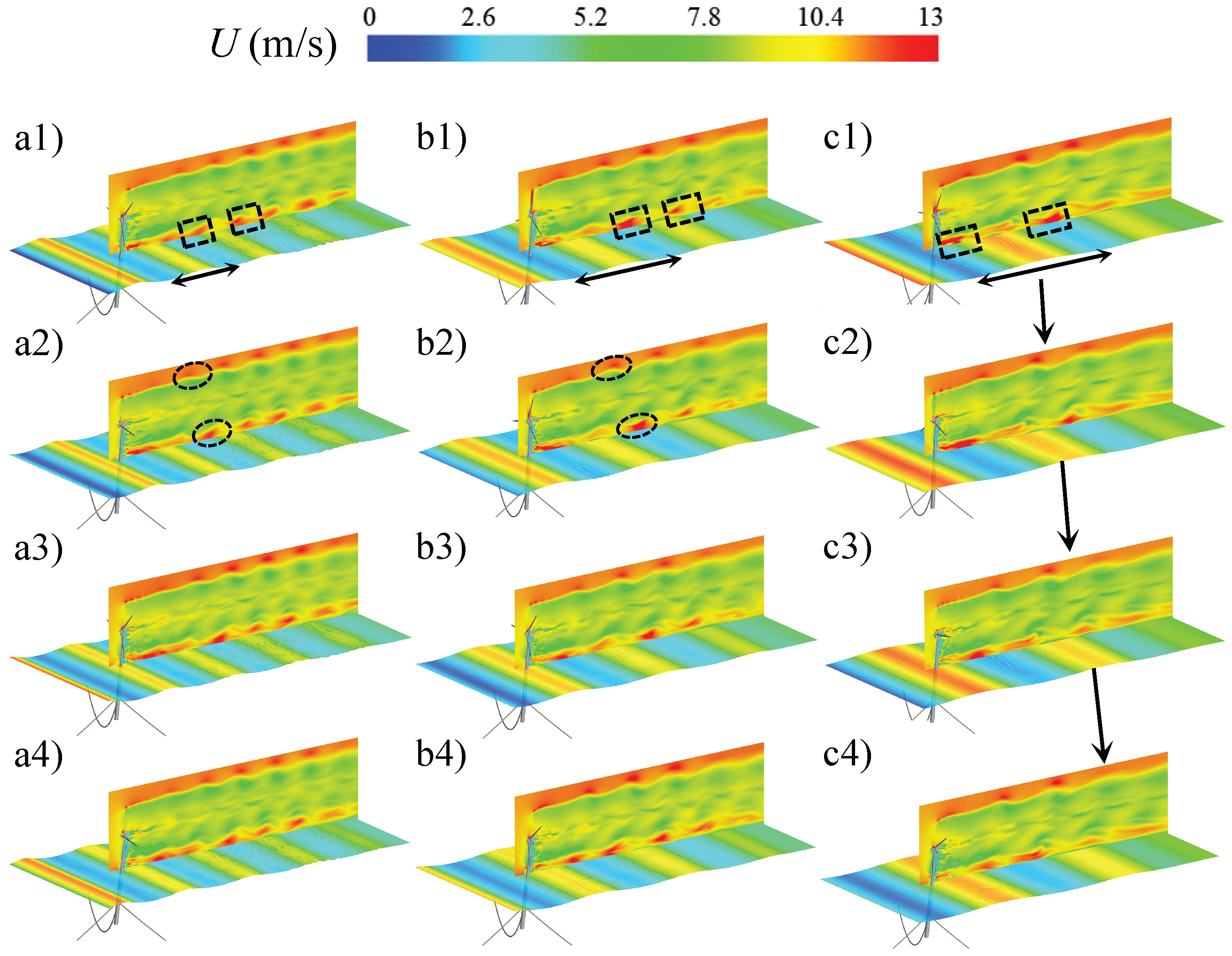
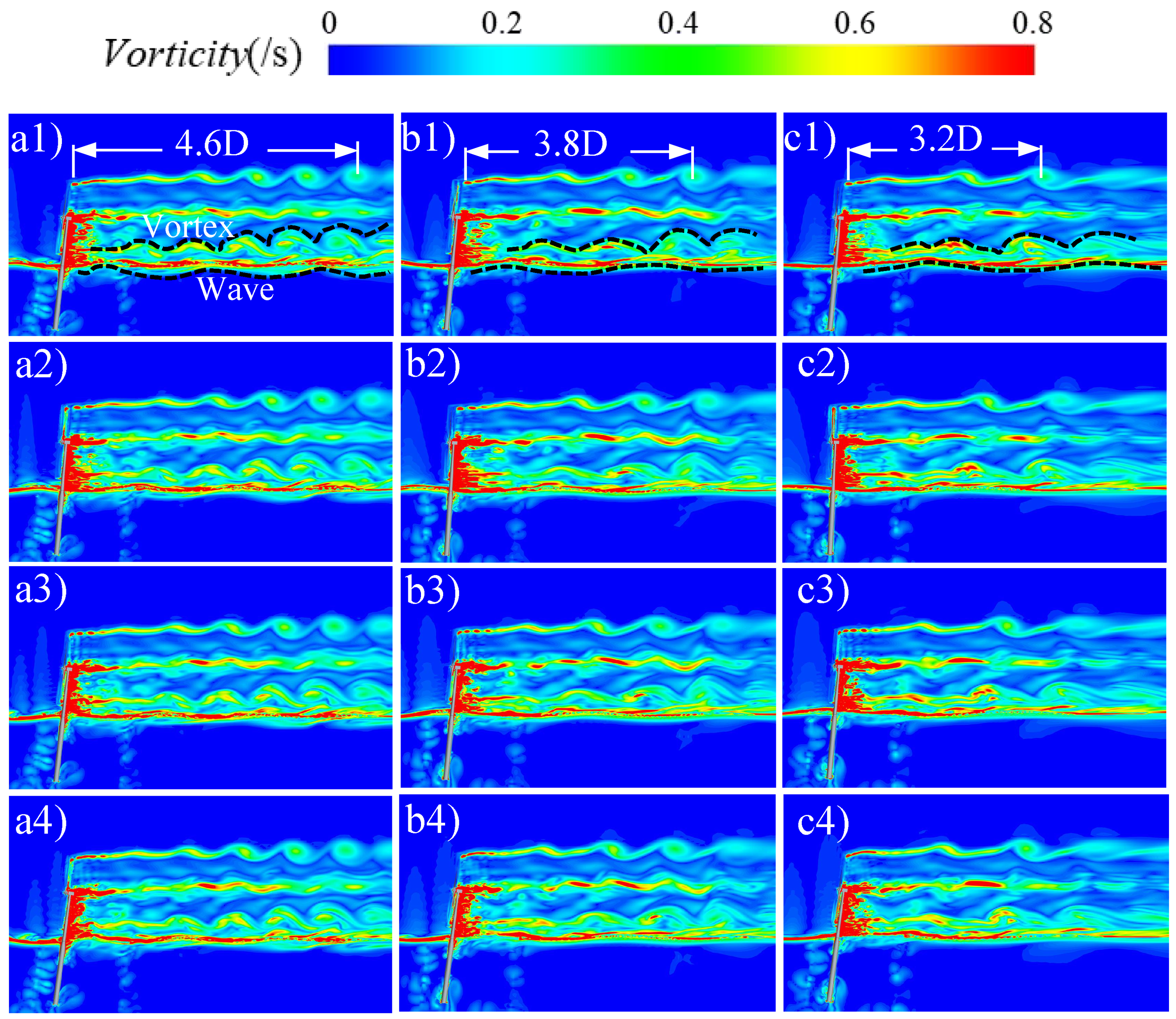
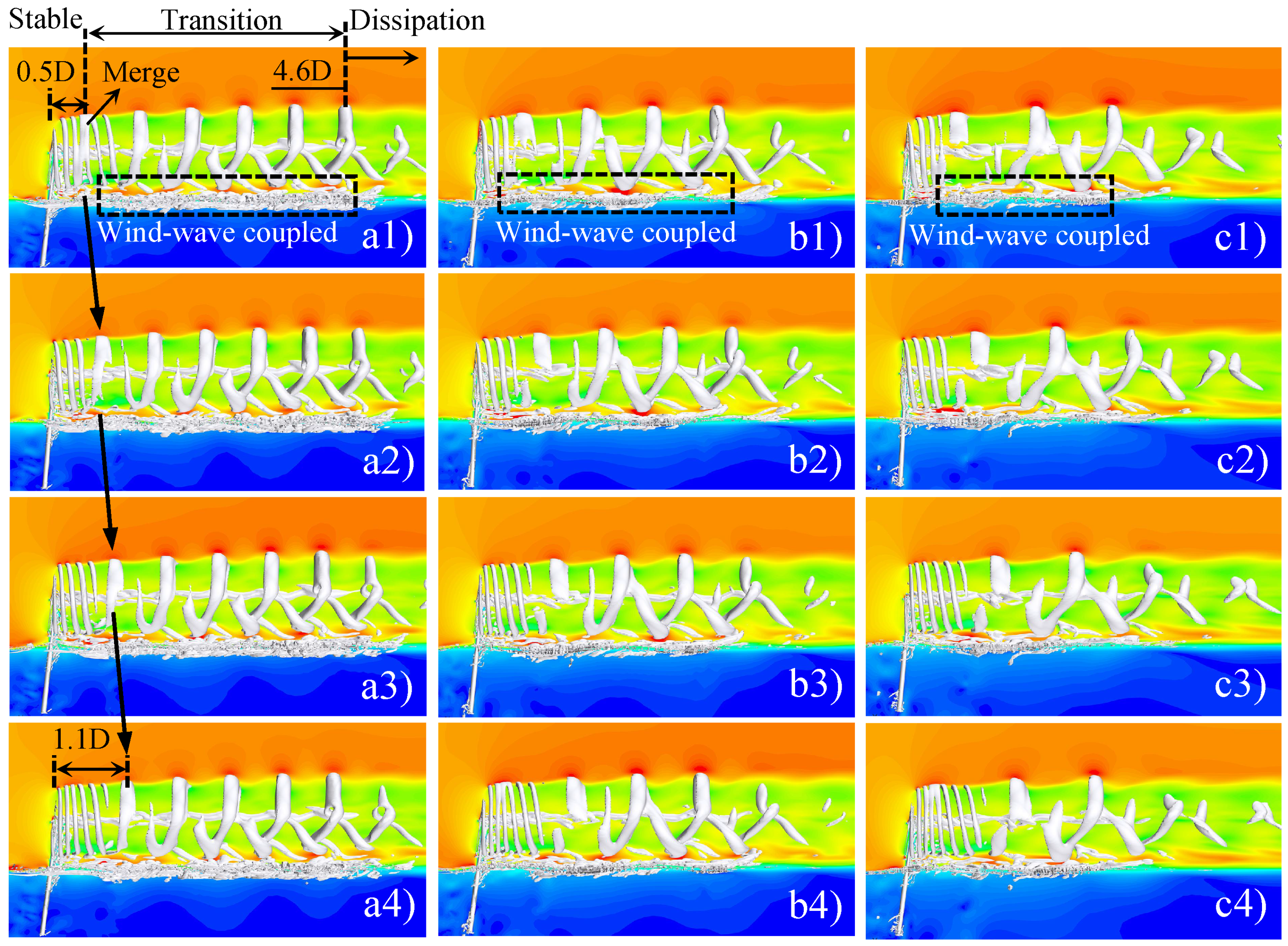
- In a smaller wave period, the interaction frequency between the wind turbine and the wake is heightened and intensified. The wake experiences more acute changes and the process of mixing the final wake zone and incoming flow is delayed. As the wave period increases, a larger pitch angle facilitates the more significant mixing of the external high-velocity region and internal low-velocity region, accelerating the wake velocity recovery process. Concurrently, the near-wake region and transition region’s length is shortened, the development process of the vortex structure in the far-wake region is expedited, the symmetry of the far wake deteriorates, and the meandering phenomenon of the wake can be clearly observed.
- (4)
- The wake’s velocity distribution is influenced by wave height, which in turn affects the pitch amplitude of the floating wind turbine, leading to a stronger blade–wake interaction and a significant impact on the formation and destruction of the wake vortex structure, altering the evolution law of the wake structure.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FOWT | Floating offshore wind turbine |
| VOF | Volume of fluid |
| IDDES | Improved delayed detached eddy simulation |
| DFBI | Dynamic fluid–body interaction |
| PIV | Particle image velocimetry |
| BEM | Blade element momentum |
| FVM | Free vortex method |
| CFD | Computational fluid dynamics |
| OC4 | Code comparison collaboration continuation |
| OC3 | Code comparison collaboration |
| LES | Large eddy simulation |
| RANS | Reynolds average Navier–Stokes |
| DES | Detached eddy simulation |
| SIMPLE | Semi-implicit pressure linked equation |
| AMR | Adaptive mesh refinement |
References
- Antonutti, R.; Peyrard, C.; Johanning, L.; Incecik, A.; Ingram, D. The effects of wind-induced inclination on the dynamics of semi-submersible floating wind turbines in the time domain. Renew. Energy 2016, 88, 83–94. [Google Scholar] [CrossRef]
- Snyder, B.; Kaiser, M.J. A comparison of offshore wind power development in Europe and the US: Patterns and drivers of development. Appl. Energy 2009, 86, 1845–1856. [Google Scholar] [CrossRef]
- Fang, Y.; Duan, L.; Han, Z.; Zhao, Y.; Yang, H. Numerical analysis of aerodynamic performance of a floating offshore wind turbine under pitch motion. Energy 2020, 192, 116621. [Google Scholar] [CrossRef]
- Ferčák, O.; Bossuyt, J.; Ali, N.; Cal, R.B. Decoupling wind–wave–wake interactions in a fixed-bottom offshore wind turbine. Appl. Energy 2022, 309, 118358. [Google Scholar] [CrossRef]
- Chen, G.; Liang, X.F.; Li, X.B. Modelling of wake dynamics and instabilities of a floating horizontal-axis wind turbine under surge motion. Energy 2022, 239, 122110. [Google Scholar] [CrossRef]
- Wen, B.; Dong, X.; Tian, X.; Peng, Z.; Zhang, W.; Wei, K. The power performance of an offshore floating wind turbine in platform pitching motion. Energy 2018, 154, 508–521. [Google Scholar] [CrossRef]
- Bayati, I.; Belloli, M.; Bernini, L.; Zasso, A. Wind tunnel validation of AeroDyn within LIFES50+ project: Imposed Surge and Pitch tests. J. Phys. Conf. Ser. 2016, 753, 092001. [Google Scholar] [CrossRef]
- Miao, W.; Li, C.; Yang, J.; Xie, X. Numerical investigation of the yawed wake and its effects on the downstream wind turbine. J. Renew. Sustain. Energy 2016, 8, 033303. [Google Scholar] [CrossRef]
- Martin, H. Development of a Scale Model Wind Turbine for Testing of Offshore Floating Wind Turbine Systems. Master’s Thesis, Univeristy of Maine, Orono, ME, USA, 2011. [Google Scholar]
- Myhr, A.; Nygaard, T.A. Experimental results for tension-leg-buoy offshore wind turbine platforms. J. Ocean Wind Energy ISOPE 2014, 1, 217–224. [Google Scholar]
- Azcona, J.; Bouchotrouch, F.; González, M.; Garciandía, J.; Munduate, X.; Kelberlau, F.; Nygaard, T.A. Aerodynamic thrust modelling in wave tank tests of offshore floating wind turbines using a ducted fan. J. Phys. Conf. Ser. 2014, 524, 012089. [Google Scholar] [CrossRef]
- Sandner, F.; Amann, F.; Azcona, J.; Munduate, X.; Bottasso, C.L.; Campagnolo, F.; Robertson, A. Model building and scaled testing of 5MW and 10MW semi-submersible floating wind turbines. In Proceedings of the 12th Deep Sea Offshore Wind R&D Conference, EERA DeepWind’2015, Trondheim, Norway, 4–6 February 2015. [Google Scholar]
- Zhao, Y.; Yang, J.; He, Y.; Gu, M. Coupled dynamic response analysis of a multi-column tension-leg-type floating wind turbine. China Ocean Eng. 2016, 30, 505–520. [Google Scholar] [CrossRef]
- Chen, J.; Hu, Z.; Wan, D.; Xiao, Q. Comparisons of the dynamical characteristics of a semi-submersible floating offshore wind turbine based on two different blade concepts. Ocean Eng. 2018, 153, 305–318. [Google Scholar] [CrossRef]
- Rockel, S.; Camp, E.; Schmidt, J.; Peinke, J.; Cal, R.B.; Hölling, M. Experimental study on influence of pitch motion on the wake of a floating wind turbine model. Energies 2014, 7, 1954–1985. [Google Scholar] [CrossRef]
- Fu, S.; Jin, Y.; Zheng, Y.; Chamorro, L.P. Wake and power fluctuations of a model wind turbine subjected to pitch and roll oscillations. Appl. Energy 2019, 253, 113605. [Google Scholar] [CrossRef]
- Fu, S.; Zhang, B.; Zheng, Y.; Chamorro, L.P. In-phase and out-of-phase pitch and roll oscillations of model wind turbines within uniform arrays. Appl. Energy 2020, 269, 114921. [Google Scholar] [CrossRef]
- Farrugia, R.; Sant, T.; Micallef, D. Investigating the aerodynamic performance of a model offshore floating wind turbine. Renew. Energy 2014, 70, 24–30. [Google Scholar] [CrossRef]
- Khosravi, M. An Experimental Study on the Near Wake Characteristics of a Wind Turbine Model Subjected to Surge, Pitch, and Heave Motions. Master’s Thesis, Iowa State University, Ames, IA, USA, 2015. [Google Scholar]
- Jonkman, J.M. Dynamics of offshore floating wind turbines—Model development and verification. Wind Energy 2009, 12, 459–492. [Google Scholar] [CrossRef]
- Cordle, A.; Jonkman, J. State-of-the-art in design tools for floating offshore wind turbines. Deliv. D4 2010, 3. [Google Scholar]
- Li, L.; Hu, Z.; Wang, J.; Ma, Y. Development and validation of an aero-hydro simulation code for offshore floating wind turbine. J. Ocean Wind Energy 2015, 2, 1–11. [Google Scholar]
- Crozier, A. Design and Dynamic Modeling of the Support Structure for a 10 MW oOffshore Wind Turbine. Master’s Thesis, Institutt for Energi-og Prosessteknikk, Trondheim, Norway, 2011. [Google Scholar]
- Karimirad, M.; Moan, T. A simplified method for coupled analysis of floating offshore wind turbines. Mar. Struct. 2012, 27, 45–63. [Google Scholar] [CrossRef]
- Sebastian, T.; Lackner, M. Characterization of the unsteady aerodynamics of offshore floating wind turbines. Wind Energy 2013, 16, 339–352. [Google Scholar] [CrossRef]
- Madsen, H.A.; Bak, C.; Døssing, M.; Mikkelsen, R.; Øye, S. Validation and modification of the blade element momentum theory based on comparisons with actuator disc simulations. Wind Energy 2010, 13, 373–389. [Google Scholar] [CrossRef]
- Oguz, E.; Clelland, D.; Day, A.H.; Incecik, A.; López, J.A.; Sánchez, G.; Almeria, G.G. Experimental and numerical analysis of a TLP floating offshore wind turbine. Ocean Eng. 2018, 147, 591–605. [Google Scholar] [CrossRef]
- Coulling, A.J.; Goupee, A.J.; Robertson, A.N.; Jonkman, J.M.; Dagher, H.J. Validation of a FAST semi-submersible floating wind turbine numerical model with DeepCwind test data. J. Renew. Sustain. Energy 2013, 5, 023116. [Google Scholar] [CrossRef]
- Masciola, M.; Robertson, A.; Jonkman, J.; Coulling, A.; Goupee, A. Assessment of the importance of mooring dynamics on the global response of the DeepCwind floating semisubmersible offshore wind turbine. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference (ISOPE2013), Anchorage, AK, USA, 30 June–5 July 2013; p. ISOPE-I-13-129. [Google Scholar]
- Ren, N.; Li, Y.; Ou, J. Coupled wind-wave time domain analysis of floating offshore wind turbine based on Computational Fluid Dynamics method. J. Renew. Sustain. Energy 2014, 6. [Google Scholar] [CrossRef]
- Zhou, Y.; Xiao, Q.; Peyrard, C.; Pan, G. Assessing focused wave applicability on a coupled aero-hydro-mooring FOWT system using CFD approach. Ocean Eng. 2021, 240, 109987. [Google Scholar] [CrossRef]
- Zhou, Y.; Xiao, Q.; Liu, Y.; Incecik, A.; Peyrard, C.; Li, S.; Pan, G. Numerical modelling of dynamic responses of a floating offshore wind turbine subject to focused waves. Energies 2019, 12, 3482. [Google Scholar] [CrossRef]
- Leble, V.; Barakos, G. Demonstration of a coupled floating offshore wind turbine analysis with high-fidelity methods. J. Fluids Struct. 2016, 62, 272–293. [Google Scholar] [CrossRef]
- Tran, T.T.; Kim, D. Fully coupled aero-hydrodynamic analysis of a semi-submersible FOWT using a dynamic fluid body interaction approach. Renew. Energy 2016, 92, 244–261. [Google Scholar] [CrossRef]
- Tran, T.T.; Kim, D.H. A CFD study of coupled aerodynamic-hydrodynamic loads on a semisubmersible floating offshore wind turbine. Wind Energy 2018, 21, 70–85. [Google Scholar] [CrossRef]
- Wang, X.; Ye, Z.; Kang, S.; Hu, H. Investigations on the unsteady aerodynamic characteristics of a horizontal-axis wind turbine during dynamic yaw processes. Energies 2019, 12, 3124. [Google Scholar] [CrossRef]
- Ye, Z.; Wang, X.; Chen, Z.; Wang, L. Unsteady aerodynamic characteristics of a horizontal wind turbine under yaw and dynamic yawing. Acta Mech. Sin. 2020, 36, 320–338. [Google Scholar] [CrossRef]
- Zhang, Y.; Kim, B. A fully coupled computational fluid dynamics method for analysis of semi-submersible floating offshore wind turbines under wind-wave excitation conditions based on OC5 data. Appl. Sci. 2018, 8, 2314. [Google Scholar] [CrossRef]
- Lin, L.; Vassalos, D.; Dai, S. CFD simulation of aerodynamic performance of floating offshore wind turbine compared with BEM method. In Proceedings of the 25th International Ocean and Polar Engineering Conference (OnePetro, 2015), Kona, HI, USA, 21–26 June 2015. [Google Scholar]
- Fu, S.; Li, Z.; Zhu, W.; Han, X.; Liang, X.; Yang, H.; Shen, W. Study on aerodynamic performance and wake characteristics of a floating offshore wind turbine under pitch motion. Renew. Energy 2023, 205, 317–325. [Google Scholar] [CrossRef]
- Liu, Y.; Xiao, Q.; Incecik, A.; Peyrard, C.; Wan, D. Establishing a fully coupled CFD analysis tool for floating offshore wind turbines. Renew. Energy 2017, 112, 280–301. [Google Scholar] [CrossRef]
- Cai, Y.; Li, X.; Leng, S.; Zhao, H.; Zhou, Y. Effect of combined surge and pitch motion on the aerodynamic performance of floating offshore wind turbine. Ocean Eng. 2024, 306, 118061. [Google Scholar] [CrossRef]
- Cai, Y.; Zhao, H.; Li, X.; Liu, Y. Aerodynamic analysis for different operating states of floating offshore wind turbine induced by pitching movement. Energy 2023, 285, 129538. [Google Scholar] [CrossRef]
- Zhang, M.; Li, X.; Xu, J. Smart control of fatigue loads on a floating wind turbine with a tension-leg-platform. Renew. Energy 2019, 134, 745–756. [Google Scholar] [CrossRef]
- Wang, X.; Cai, C.; Cai, S.; Wang, T.; Wang, Z.; Song, J.; Rong, X.; Li, Q. A review of aerodynamic and wake characteristics of floating offshore wind turbines. Renew. Sustain. Energy Rev. 2023, 175, 113144. [Google Scholar] [CrossRef]
- Bae, Y.; Kim, M.; Kim, H. Performance changes of a floating offshore wind turbine with broken mooring line. Renew. Energy 2017, 101, 364–375. [Google Scholar] [CrossRef]
- Roald, L.; Jonkman, J.; Robertson, A.; Chokani, N. The effect of second-order hydrodynamics on floating offshore wind turbines. Energy Proc. 2013, 35, 253–264. [Google Scholar] [CrossRef]
- Chen, G.; Li, X.; Liang, X. IDDES simulation of the performance and wake dynamics of the wind turbines under different turbulent inflow conditions. Energy 2022, 238, 121772. [Google Scholar] [CrossRef]
- Lei, H.; Zhou, D.; Lu, J.; Chen, C.; Han, Z.; Bao, Y. The impact of pitch motion of a platform on the aerodynamic performance of a floating vertical axis wind turbine. Energy 2017, 119, 369–383. [Google Scholar] [CrossRef]
- Lei, H.; Zhou, D.; Bao, Y.; Chen, C.; Ma, N.; Han, Z. Numerical simulations of the unsteady aerodynamics of a floating vertical axis wind turbine in surge motion. Energy 2017, 127, 1–17. [Google Scholar] [CrossRef]
- Choi, J.; Yoon, S. Numerical simulations using momentum source wave-maker applied to RANS equation model. Coast. Eng. 2009, 56, 1043–1060. [Google Scholar] [CrossRef]
- Tran, T.; Kim, D.; Song, J. Computational fluid dynamic analysis of a floating offshore wind turbine experiencing platform pitching motion. Energies 2014, 7, 5011–5026. [Google Scholar] [CrossRef]
- Shen, X.; Hu, P.; Chen, J.; Zhu, X.; Du, Z. The unsteady aerodynamics of floating wind turbine under platform pitch motion. Proc. Inst. Mech. Eng. A J. Power Energy 2018, 232, 1019–1036. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Minimum Grid (m) | Total Grid Number | Relative Difference | |
|---|---|---|---|---|
| Power | Thrust | |||
| case1 | 0.05 | 10.56 | 6.52% | 7.40% |
| case1 | 0.04 | 13.20 | 3.70% | 4.56% |
| case3 | 0.02 | 17.61 | 1.80% | 2.48% |
| case4 | 0.02 | 20.18 | 1.55% | 2.06% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, X.; Li, Z.; Han, X.; Fu, S.; Zhu, W.; Pu, T.; Sun, Z.; Yang, H.; Shen, W. Study on Aerodynamic Performance and Wake Characteristics of a Floating Offshore Wind Turbine in Wind–Wave Coupling Field. Sustainability 2024, 16, 5324. https://doi.org/10.3390/su16135324
Liang X, Li Z, Han X, Fu S, Zhu W, Pu T, Sun Z, Yang H, Shen W. Study on Aerodynamic Performance and Wake Characteristics of a Floating Offshore Wind Turbine in Wind–Wave Coupling Field. Sustainability. 2024; 16(13):5324. https://doi.org/10.3390/su16135324
Chicago/Turabian StyleLiang, Xiaoling, Zheng Li, Xingxing Han, Shifeng Fu, Weijun Zhu, Tianmei Pu, Zhenye Sun, Hua Yang, and Wenzhong Shen. 2024. "Study on Aerodynamic Performance and Wake Characteristics of a Floating Offshore Wind Turbine in Wind–Wave Coupling Field" Sustainability 16, no. 13: 5324. https://doi.org/10.3390/su16135324