Abstract
Illegal dumping is one of the major issues to be addressed by public managers in both developed and developing countries. The adequate tackling and enforcement of such unlawful activities require continuous territory monitoring, the lack of which is the principal cause of the failure of traditional systems based on patrolling, eventually triggered by sparse crowdsourced data. This work proposes the digitalization of the entire illegal waste management monitoring process through an innovative decision support system based on multiscale remote sensing data. These data enable the assessment of the risk level of specific areas, thus determining inspection priorities in line with the available patrolling resources. The proposed methodology provides a tool to assess the impact of diverse monitoring system parameters on overall the performance in light of the expected operating costs and to understand whether remote sensing can help a better management of illegal waste in a specific operational scenario, thus helping in the determination of the best cost–benefit trade-off. Simulation results over a demonstration scenario, based on realistic dumping/restoration dynamics and the typical performance of satellite detection systems, show that the adoption of remote sensing technologies in the monitoring process can increase the restoration capacity by about 10% compared to traditional patrolling.
1. Introduction
During recent decades, increasing populations and industrial growth have led to a significant rise in solid waste production in a landscape characterized by a progressive reduction in areas that are suitable for proper waste disposal [1]. According to [2], in 2016, about 2 billion tons of waste was generated worldwide. This number is predicted to increase to 3.5 billion tons by 2050 [3]. The topic represents a crucial socioeconomic issue, as unmanaged waste contributes to environmental pollution, furthers the transmission of diseases, and negatively affects the economy [3]. These considerations hold for both developed and developing countries, though with different facets and implications for public managers, who are requested to deliver rapid and effective services, often lacking adequate resources. Moreover, they are also responsible for monitoring and countering illegal dumping activities, which are favored by corrupted industries and criminal organizations with converging interests [4].
Illegal dumping is an issue affecting many countries all around the world. It is characterized by both opportunistic behaviors and criminal ones. In the first case, the offense is committed by individuals disposing of waste in violation of their current, local regulations. In the second, dumping is conducted by criminal organizations with the complicity of entrepreneurs, mainly to reduce the cost of the disposal of hazardous waste [4]. This phenomenon is widely documented [5,6,7] and requires appropriate integrated solid waste management systems (ISWMSs) to be designed with the aim of both managing illicit waste cycles and preventing and/or mitigating the impact of illicit activities [3,5,8].
In this regard, monitoring activities are usually implemented using crowdsourced data, i.e., warnings raised by private citizens, and/or reports produced by dedicated field campaigns [8]. The latter practice is only moderately effective, as it does not allow for continuous and synoptic territory monitoring and it is highly demanding in terms of human resources and associated costs.
In recent years, aerial remote sensing technologies have emerged as strategic tools for managing both legal and illegal waste cycles [9,10]. Close-range platforms have been increasingly exploited for the high-resolution mapping of sites classified as environmentally sensitive [3], like landfills [11,12,13]. However, these are useful only in cases where the position of the dumps is known and there is a need to characterize the site in terms of extension, volume, composition, etc.
In dealing with illegal dumping, the major issue is the detection of potentially affected areas, as they are usually scattered around large urban agglomerates. This activity, usually involving object detection algorithms, can also be automatically or semi-automatically addressed through satellite remote sensing [5,14,15] when very high resolution (VHR) images are available.
These considerations bring us to the concept of progressive monitoring, i.e., the joint exploitation of different sensing technologies for gradual and multiscale detection, confirmation and characterization of targets of environmental interest, like illegal dumps. In other words, the monitoring activity is seen as an information process composed of three phases with different purposes, fed by different typologies of remote sensing data.
In the first phase, i.e., the detection phase, the objective is to discover areas potentially affected by illegal dumping at a regional scale using satellite data. The second phase, devoted to the confirmation of satellite detections, can be implemented with the aid of expert operators, who visually inspect the detected areas, employing higher-resolution images, like aerial images, to verify the presence of micro-dumps and define their extent. Alternatively, ground patrols can be used for field investigations. Finally, confirmed targets are investigated locally using close-range platforms to generate extension and composition attributes useful for successive restoration. This phase can also be simultaneous with confirmation.
However, territory monitoring is only one of the aspects contributing to ISWMSs, as the full exploitation of sensory data requires decision making about how the information they contain can be applied to the waste management problem. Therefore, the availability of decision support systems (DSSs) is crucial for the effectiveness of ISWMSs [16]. They can be categorized as strategic decision support systems (SDSSs) or tactical decision support systems (TDSSs) [17].
In the first case, the focus is on solutions for one-off spatial planning events, aiming to prepare monitoring campaigns, resource planning, environmental impact modeling, and risk assessment, as well as the evaluation of restoration results. Strategic decision-making goals for illegal waste monitoring include the definition of monitoring tools and processes. They should (i) be compliant with national and international directives, (ii) incorporate the best practices suggested by environmental agencies, and (iii) be supported by studies demonstrating their effectiveness against alternative approaches that can be adopted with the same budget [18,19]. This is possible using stochastic models [20] and numerical simulations, as proposed in this paper.
TDSSs are used for the systematic and periodic planning of monitoring and restoration activities after defining the relevant constraints in terms of resources. They include districting, i.e., the partitioning of the territory for waste collection purposes, as well as fleet sizing and its management [21]. All this should be arranged to reduce the environmental risk due to the presence of abandoned illegal waste through waste collection and/or site restoration.
Therefore, it is crucial for the DSS to incorporate an environmental risk model [22,23,24]. Moreover, the system should be able to provide information about inspection priority changes following site confirmation through appropriate modeling, considering the following factors: (i) the probability of the existence of the hazards depending on the reliability of the information source [14,25,26,27]; (ii) the impact of the hazards on the surrounding areas; (iii) the already-implemented mitigation actions. Finally, it should support the management of the available resources (people, ground vehicles, field instrumentation, drones [28]) under given constraints through an optimization model [29].
In operational scenarios, the systematic use of satellite data for monitoring micro-dumps is not state-of-the-art, as dumping is usually tackled using patrolling, eventually triggered by crowdsourced data (as also discussed in [30]). Recently, the remote sensing community contributed to the topic by presenting some solutions addressing single blocks of the whole chain, like the identification of sites that have potentially been affected by illegal dumps [14] and their characterization [31,32]. This paper introduces a novel functional architecture for DSSs that can manage the whole information process, from the mapping of sites that have potentially been affected by the phenomenon up to the design of the patrolling routes necessary for the implementation of restoration actions. The system is fed by progressive monitoring data and can integrate traditional crowdsourcing to build risk and priority maps constituting the input for routing. It aims to support public decision makers in (i) discovering and characterizing illegal dumps, (ii) prioritizing field operations based on the available resources, and (iii) understanding the cost–benefit of the diverse waste monitoring approaches. The underlying models have been validated on historical remote sensing and on-the-ground data collected over a densely populated area in Southern Italy, between the cities of Naples and Caserta [4].
The work is organized as follows: The remote sensing products, their performances, and the case study considered for their performance assessment are presented in Section 2. The progressive monitoring approach and the DSS architecture are described in Section 3. A novel methodology to estimate system performance using simulations is discussed in Section 4. Section 5 discusses the obtained results from the perspective of previous studies and working hypotheses. Conclusions are drawn at the end of the work.
2. Case Study and Remote Sensing Products
2.1. Geographical Area of Interest and End Users’ Needs
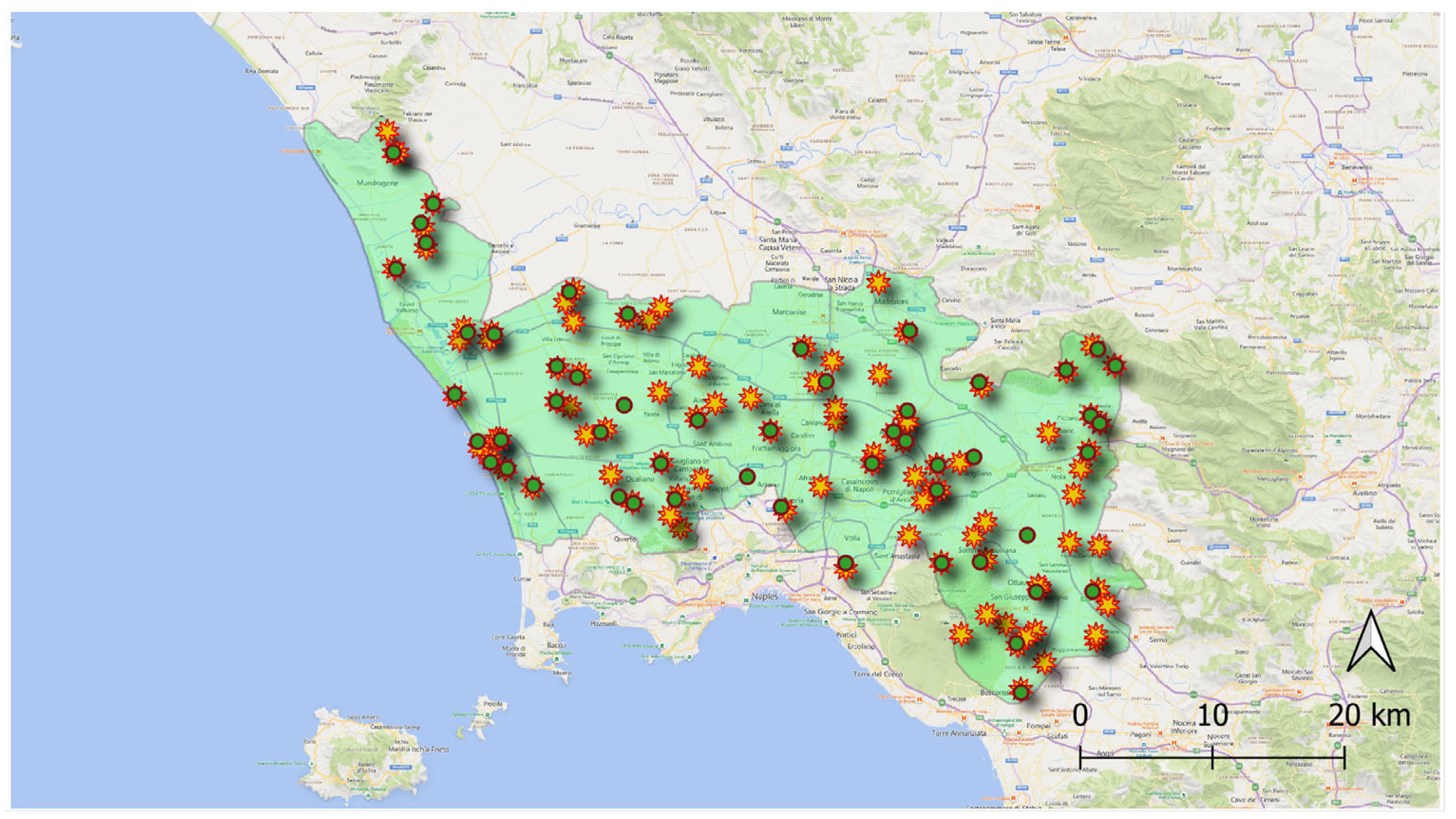
The “Land of Fires” is an environmentally critical area of Southern Italy between the cities of Naples and Caserta. This denomination refers to the high occurrence of fires in some rural areas of this territory triggered by micro-dumps that accumulate along roads or the countryside. Due to some political and environmental crises that compromised the waste collection cycle for a long time (from 1994 to 2012), the area is under the attention of regional and national authorities for the phenomenon of illegal waste dumping and burning and is currently the object of European sanctions due to insufficient restoration activities. Although the acute phase of the environmental crisis has been solved [32,33], the attention of the authorities is still high, and several prevention, monitoring, and repression activities are deployed on the territory [18,19].
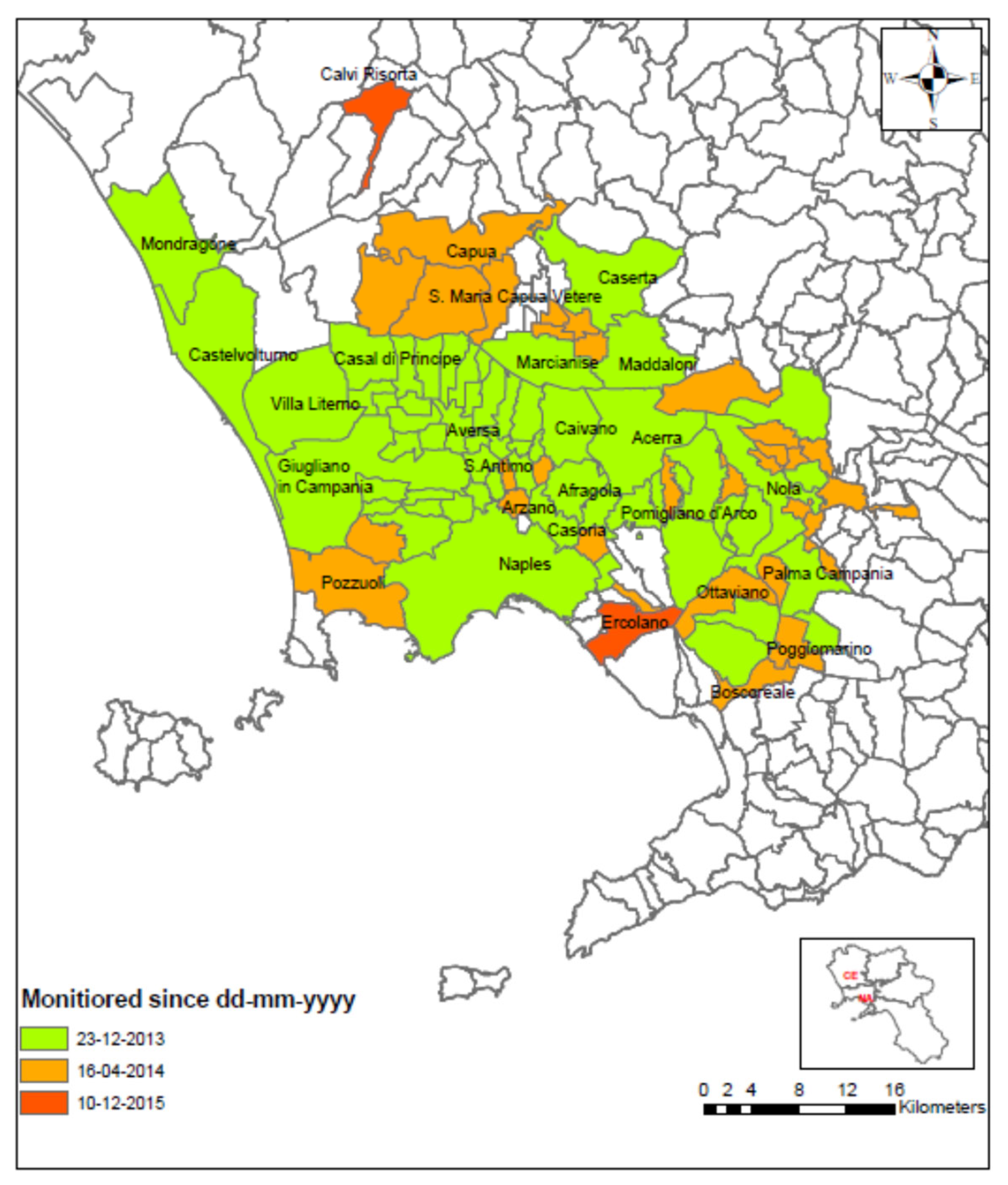
The study area (depicted in Figure 1) has been partitioned into elementary geographical units, hereafter referred to as inspection cells, forming a hexagonal grid. The diameter of the circle that circumscribes the hexagonal cells is 110 m.
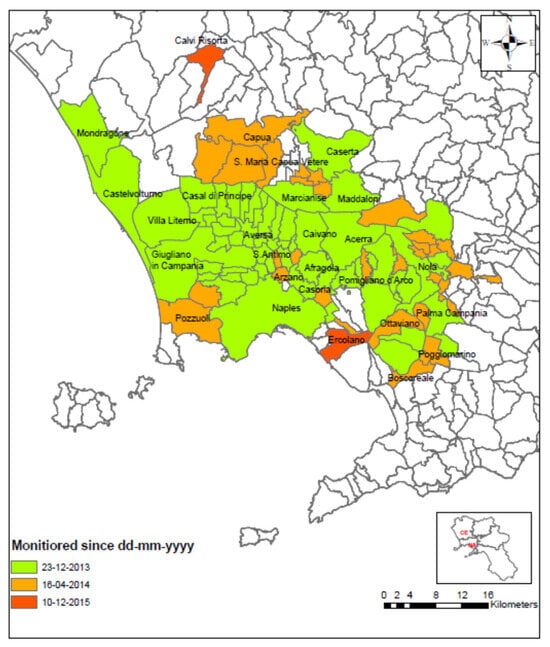
Figure 1.
Map of the “Land of Fires” provided by the Environmental Protection Agency of the Campania Region (ARPAC). The areas identified by the diverse colors were monitored by the public administration starting from different dates.
The reference end-users for the proposed system are the environmental monitoring agencies committed to discover, identify, and characterize illegal dumping sites to activate the subsequent restoration in charge of public authorities. Their goal is to optimize the resources to be employed for such activities to obtain the best performance at the minimum cost, especially in rural and industrial areas, where the absence of population makes citizens’ spontaneous reporting less effective.
2.2. The Monitoring Approach
With the phrase “progressive monitoring”, we mean the exploitation of different remote sensing technologies and methodologies to acquire increasingly detailed and complete information. In such a way, technologies with high temporal frequency and spatial coverage but with lower spatial resolution are gradually complemented by those with enhanced spatial resolution and information completeness, typically usable on smaller areas and with higher activation costs. Thus, the most complete information will be collected only where more clues of interest are gradually evidenced.
Specifically, the study area has been investigated utilizing very high resolution (VHR) satellite data and ultra high resolution (UHR) aerial imagery acquired during dedicated campaigns. Close-range remote sensing has been implemented to characterize small micro-dumps. Ground surveys performed by the regional public agency for environmental monitoring (SMA Campania) using mobile phone cameras and dedicated apps were used to validate such remote sensing data.
As for satellite data, four-band VHR images acquired by Pleiades and GeoEye-1 constellations have been considered in this research. Panchromatic data have a spatial resolution of about 50 cm. Multispectral ones have 2 m and 1.64 m spatial resolutions, respectively. These data are used for dump detection (as proposed in [15]) to determine which sites should be potentially inspected via aerial surveys or ground patrolling (see Figure 2). The products obtained without the photo-interpretation of satellite detections will be referred to as unvalidated satellite detection maps in the following; otherwise, they are referred to as validated satellite detection maps.

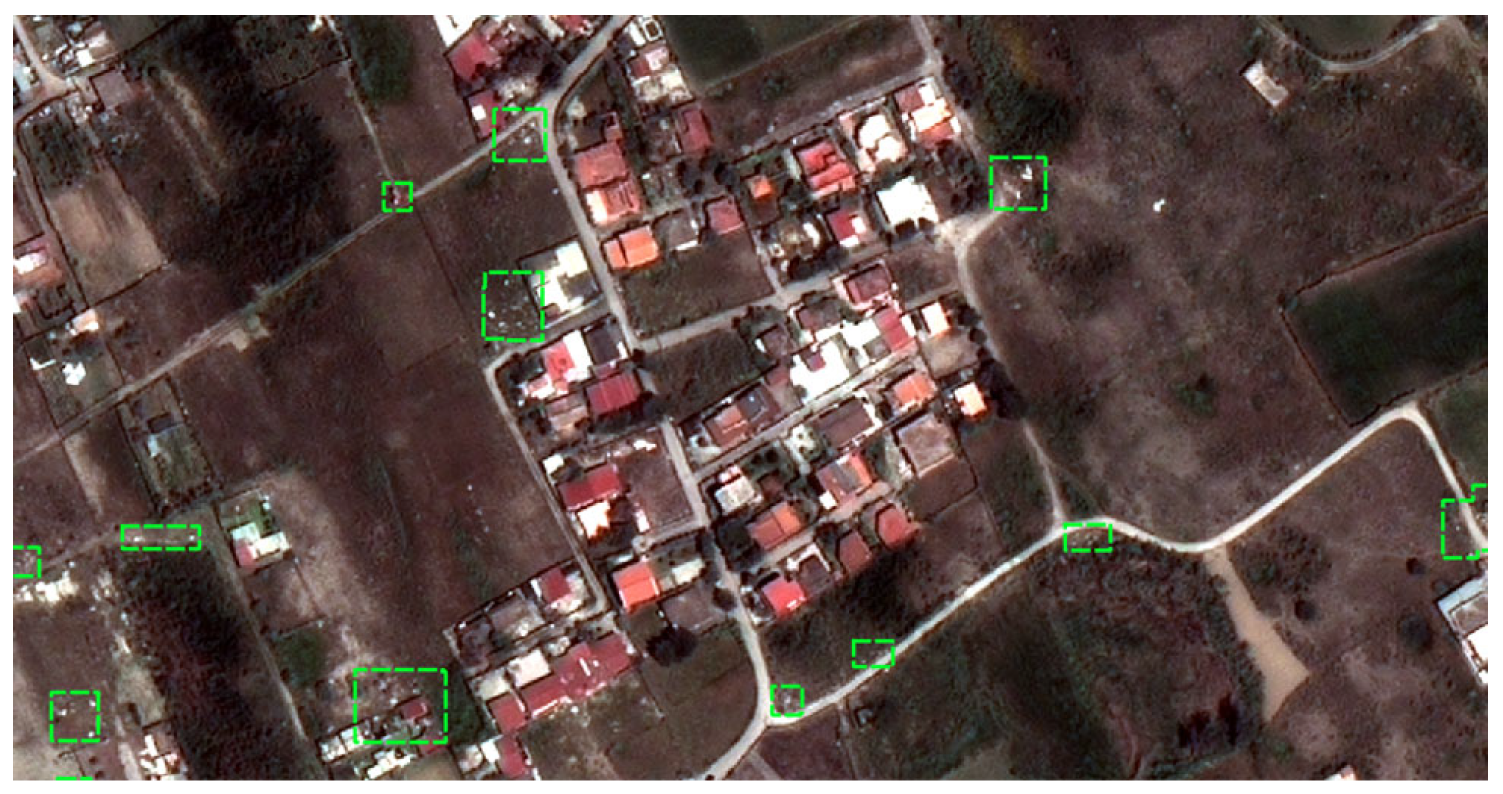
Figure 2.
Example of detection data retrieved via automatic detection in satellite images. Green frames indicate sites potentially affected by micro-dumps.
Aerial remote sensing images are used to produce reliable ground truth for training detection models and to validate the output of the automatic satellite detections. In this research, annotated RGB aerial orthophotos with 5 cm spatial resolution have been considered for ground truth production.
The adopted photo-interpretation process can start from scratch or be initialized with a recent satellite unvalidated detection map, in which case it consists of eliminating false alarms and/or adding some omitted targets. Photo-interpreted data are validated and can be used directly in the final application or to validate the performance of the unvalidated satellite products.
After target confirmation, the performance of satellite detection can be evaluated according to standard precision and recall parameters calculated over the inspection cells. Recall is essentially the true positive rate () defined by relation
where precision is the complement to 1 of the false discovery rate (), i.e.,
where is the overall number of micro-dumps confirmed by photo-interpreters, is the number of satellite detections, and is the cardinality of the intersection between the detected and the confirmed micro-dumps.
According to [10], the expected precision and recall values of micro-dump detection algorithms on UHR aerial images square sections of variable dimension from 120 × 120 m to 200 × 200 m are in the order of 80% for both precision and recall.
Using VHR satellite images, the best performance is achieved with techniques based on convolutional neural networks (CNNs) like InceptionV3 [34] and RetinaNet [35]. As reported in [30], the expected values for precision and recall are, respectively, 75% and 48% at the hazard scale, and 59% and 91% at the cell scale.
The DSS is associated with an unnecessary inspection cost (commission cost), with ground surveys made in the absence of dumping sites. This aspect is related to vehicle routing optimization, which will be discussed in Section 3. Similarly, a missed intervention cost (omission cost) is associated with dumps within the cells that are not inspected. The commission cost depends on the location of the erroneously inspected site (in the case of ground patrolling) or the visual photo-interpretation cost (in the case of validated map production). It deteriorates the probability of discovering new targets. The value of omission cost (evaluated ex-ante) depends on the environmental risk of the cell and is expressed by the inspection priority model that will be introduced in Section 3.
The last typology of remote sensing data exploited in this research is represented by close-range remote sensing images acquired with drones (GSD < 2 cm). Specifically, they have been exploited for real-time volumetric characterization of confirmed micro-dumps using simultaneous localization and mapping (SLAM) techniques fed by data acquired by optical payloads [8]. However, this solution can be also exploited to retrieve information about the composition of the dump using multispectral and/or hyperspectral sensors [36].
The data used for feeding the DSS are summarized in Table 1 with the adopted technologies and their expected performances.

Table 1.
Summary of data and techniques used in the proposed progressive monitoring approach and expected performance as declared by the literature.
3. Architecture of the Decision Support System
The following paragraphs illustrate how the different remote sensing technologies, individually exploited to solve specific tasks of the whole framework [8,30], can be integrated into a single monitoring process that can be digitalized into a DSS, whose engine is constituted by the statistical models for environmental risk [22], sites prioritization [37], and resource allocation [38].
3.1. Overview
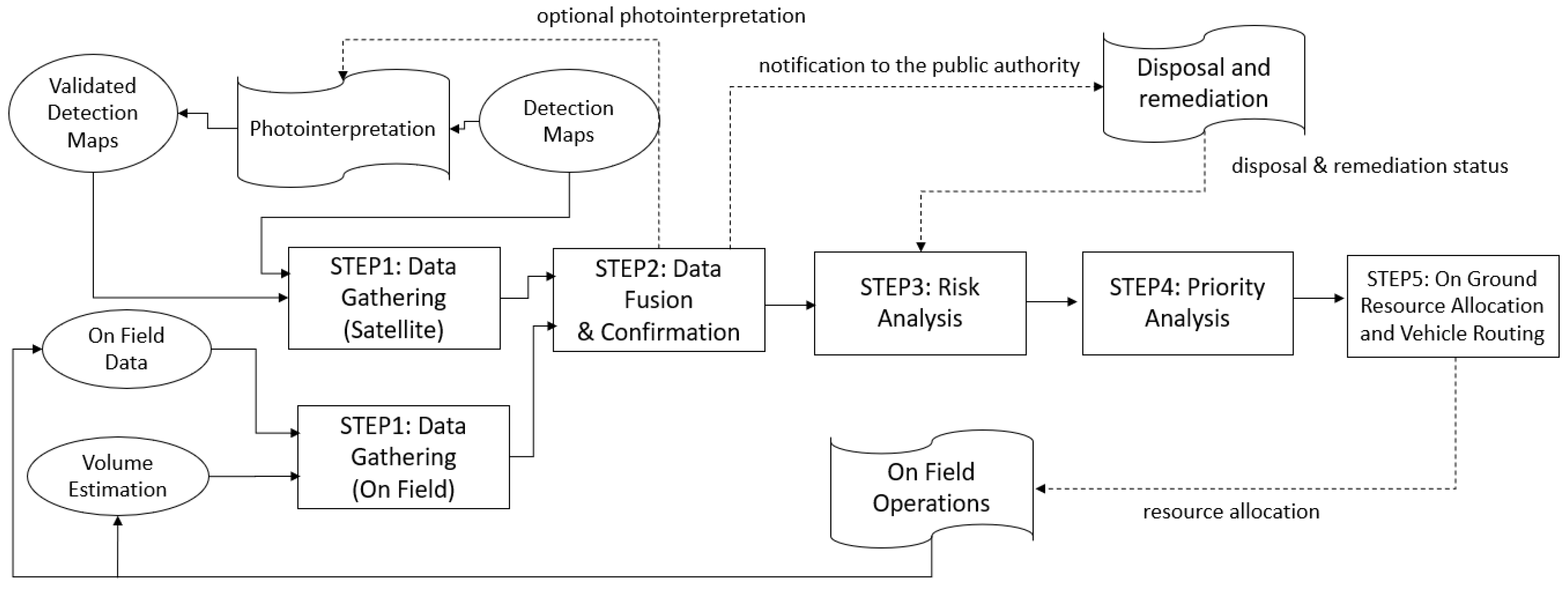
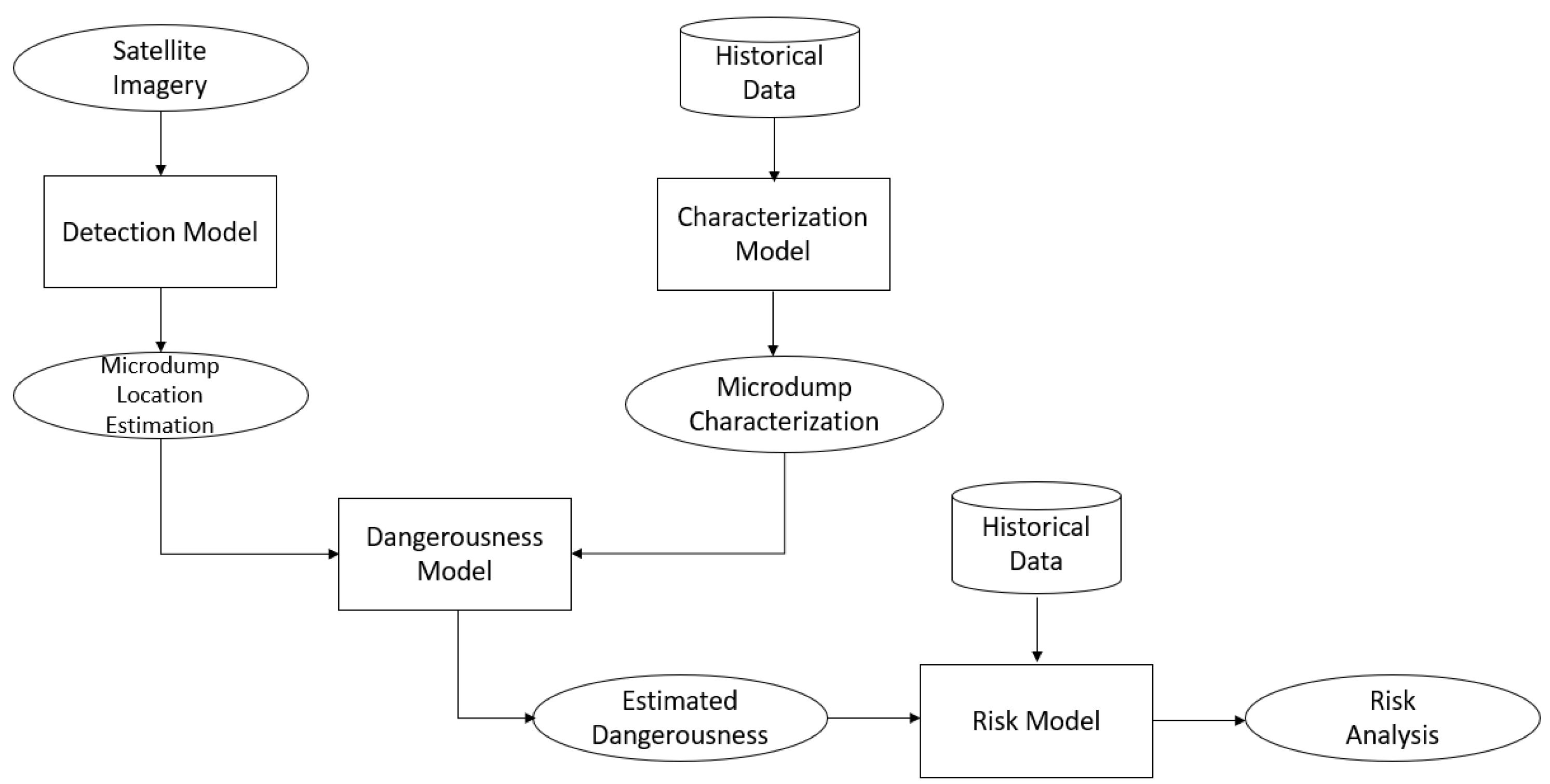
The architecture of the proposed DSS, depicted in Figure 3, is composed of five main processing blocks: data gathering, data fusion, risk analysis, priority analysis, and on-the-ground resource allocation and vehicle routing. In the diagram, ellipses stand for exchanged data, rectangles stand for DSS processing blocks, and irregular frames stand for processes that are external to the DSS. Its final output is the daily route to be followed by operators for field inspections and/or restoration actions implementation. Each step will be discussed in detail in the following sections.
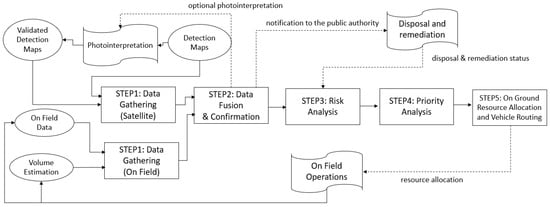
Figure 3.
Proposed decision support system architecture.
3.2. Step 1: Data Gathering
The system is designed with the adaptability to handle diverse information about the presence of micro-dumps. This includes datasets from various sources, each with its own level of confidence and descriptive completeness. As previously mentioned, the progressive approach offers three distinct possibilities; these are represented by the following data types:
- -
- VHR satellite data: These are acquired on a bi-monthly or quarterly basis and automatically processed to extract unvalidated detection products that can be occasionally or periodically validated through photo-interpretation or ground patrolling.
- -
- UHR airborne data: These are occasionally acquired and exploited for ground truth retrieval via photo-interpretation and for the training of the detection algorithm.
- -
- Field data: These are acquired during patrolling and include data records that are retrievable through the visual inspection of the site and close-range volumetric characterization data when available.
Each micro-dump can be characterized with information coming from more sources, stored within a data record with the following attributes: (i) unique identification key of the dumping site, (ii) reliability, i.e., the probability that it really exists according to the detection system exploited, (iii) geographic localization, (iv) information source, (v) estimated extension, (vi) estimated volume, and (vii) estimated composition. Depending on the data source, some of these attributes could be void. For example, if the dump has been detected using satellite images, information related to its volume and composition would be unavailable. When this information is missing, statistical forecasts of missing data are made based on geo-localization and historical data.
3.3. Step 2: Data Fusion
The information extracted from data may concern the following: (a) not previously detected micro-dumps; (b) previously detected micro-dumps; (c) micro-dumps that have been visually confirmed by the photo-interpreter; (d) micro-dumps that have already been confirmed and characterized through on-the-ground monitoring. Different information regarding the same location must be consolidated: in particular, its spatial coordinates, the confidence about the phenomenon’s existence, and its characterization (volume and composition). Therefore, it is necessary to define a strategy that enables the following: (a) the association of the various evidence collected with the unique identification key; (b) the estimation of the probability of the existence of the phenomenon considering all the available information (see Section 3 and Section 4); (c) the consolidation of the micro-dump description (the most accurate information sources prevail in updating the description, for example, satellite respect to mobile camera for geo-localization).
The identification of correspondences between satellite data and ground surveys (see the simulation results in Figure 4) can be implemented either automatically with a minimum distance approach or manually by the DSS operator, which can choose the correct association within a group of already detected or confirmed dumping sites through a graphical user interface. It is assumed that the coordinates of the micro-dumps detected during the ground surveys have been previously validated and corrected; otherwise, the data fusion approach should be more complex and include options to correct the coordinates of the ground surveys.
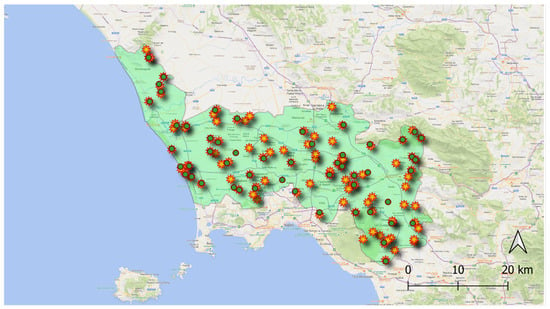
Figure 4.
New satellite detections (yellow dots) and verification of correspondence with previous confirmations (green dots).
As previously explained, the confirmation phase (validation of the detected sites using photo-interpretation) is optionally performed during the data fusion processing step. “Optionally” means that, if neither human resources nor UHR airborne data are available for validation, the DSS considers the input as unvalidated, thus having high uncertainty and low information content.
3.4. Step 3: Risk Analysis
Following the environmental risk analysis literature [33], some definitions tailored to the specific application at hand are provided.
By hazard probability, we mean the probability of the existence of the hazard source, i.e., the probability of the presence of a micro-dump. The hazard intensity is the product of the probability that a harmful event will be triggered (in our case, a fire) and the expected intensity of the event, depending on the characteristics of the hazard (in our case, the volume and the composition of the micro-dump).
The territory’s vulnerability is linked to the density of the active population in the geographical areas surrounding the hazard and its exposure to the phenomenon (the exposure is different in residential, rural, or industrial areas).
The impact is the expected damage that can be caused to people who live or work in the surroundings of the micro-dump, normalized against the intensity of the hazard. It is assumed that there is a proportional relation between the hazard intensity and its impact.
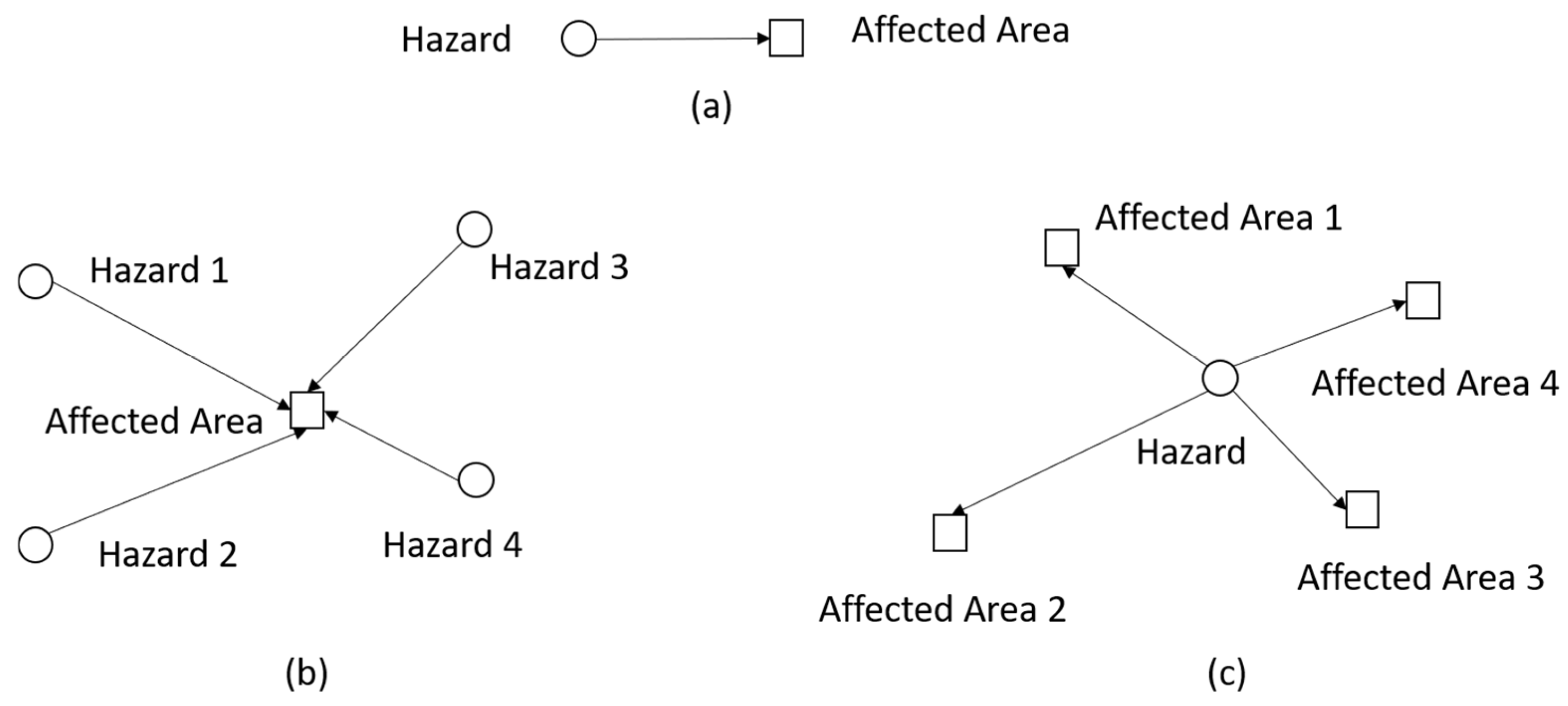
The risk of the specific hazard for the specific geographical area (see Figure 5a) is the product of hazard probability, potential dangerousness, vulnerability, and impact for the generic location. Each specific hazard is referred to. The spatial integral of the risk associated with all the hazards affecting a specific area (see Figure 5b) measures the expected damage obtained considering all the hazards that can affect the target area. It represents the risk level for the population. On the other hand, the overall risk induced by the specific hazard (see Figure 5c) is given by the spatial integral of the hazard risk extended to all the areas on which it can have an influence. It quantifies the dangerousness of the micro-dump in terms of the expected damage to surrounding areas and enables an understanding of how dangerous the single micro-dump is for the people living in its neighborhood.
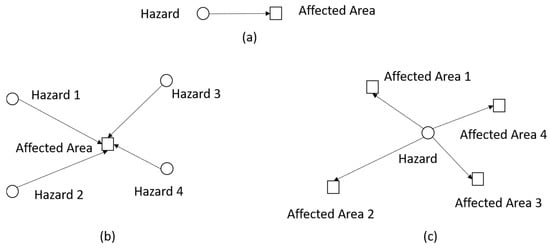
Figure 5.
Graphical representations of (a) risk of the specific hazard for the specific geographical area, (b) cumulative risk of the hazards for the specific geographical area, and (c) overall risk induced by the specific hazard.
While the hazard intensity is a property of the micro-dump and is independent on the territorial context (if a micro-dump in a deserted area and one located in a city are equally hazardous, then their potential dangerousness is exactly the same), the risk associated with the hazard expresses the hazard contextualized in the geographical context (the expected damage to the surrounding population). This means that the associated risk is high if the hazard is located in a populated area while it is negligible otherwise.
A suitable risk model for assessing the fire risk, which is the principal interest of the reference end-user, is illustrated in [22]. The workflow for its calculation is shown in Figure 6; here, ellipses correspond to updated data, cylinders to historical data, and rectangles to statistical models.
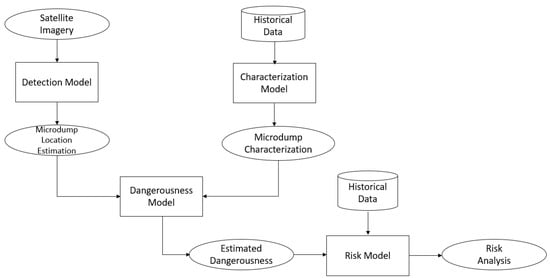
Figure 6.
Workflow for the calculation of the fire risk.
denotes the spatial coordinates of the cell in which the hazard of coordinate is located; denotes the coordinates of the inspection cell affected by the hazard. The risk of the specific hazard for the specific geographical area for fully characterized micro-dumps is defined here.
where is the dangerousness of the hazard (see [22] for details), is the exposure of the inspection cell, and is the impact of the hazard on the cell. The exposure decreases with the distance from the hazard and, as explained in [22], is weighted in the range [0, 1] according to the land use. The impact is proportional to the population density of the affected cell.
For confirmed micro-dumps, the overall risk induced by the specific hazard, graphically represented in Figure 5a, can be evaluated as follows:
The risk analysis involves the evaluation of (i) the composition and volume of micro-dumps (for hazard evaluation), (ii) the distance from the hazard and land use (for exposure evaluation), and (iii) the population density (for impact evaluation). Such information can be retrieved from historical data, which are available from the Italian Institute of Statistics (ISTAT) and the literature on land use maps [22]. The volume can be estimated as suggested in [8].
According to the block diagram shown in Figure 6, the calculated risk is weighted against the probability of the existence of the micro-dump. In the absence of photo-interpretation, it can be evaluated based on the expected performance of the detection algorithm. The expression for the risk induced by the detected hazard is as follows:
where the value , depending on waste volume and composition, is estimated statistically from historical data available for the analyzed cell. Only for validated detection products, the volume can be inferred from the estimated micro-dump area; this can be made optionally available in the DSS. In general, the dependence of dangerousness from the specific hazards is therefore considered in the next formulas.
Assuming that a cell has been not inspected by ground patrols, it is possible to estimate the number of micro-dumps, , within it, as follows:
where is the false discovery rate of the satellite detection system, is its detection probability (recall), is the number of the total detections in the analyzed inspection cell, and is the estimated number of undetected micro-dumps.
In such cases, the risk induced by the undetected hazard can be formulated as follows:
where can be estimated only from historical data on the analyzed cell, so that represents a standard estimation for all undetected micro-dumps.
The overall risk induced by all the hazards in the inspection cell can be evaluated as
where is the probability that the detected hazard is not a false alarm. It can be rewritten as:
where is the false discovery rate of the detection algorithm. Precision and recall scores of micro-dump detection algorithms in VHR satellite images are given in [15,30] for machine learning and deep learning detection approaches, respectively. Such scores, defined at the hazard scale, are used in the risk model adopted within the DSS.
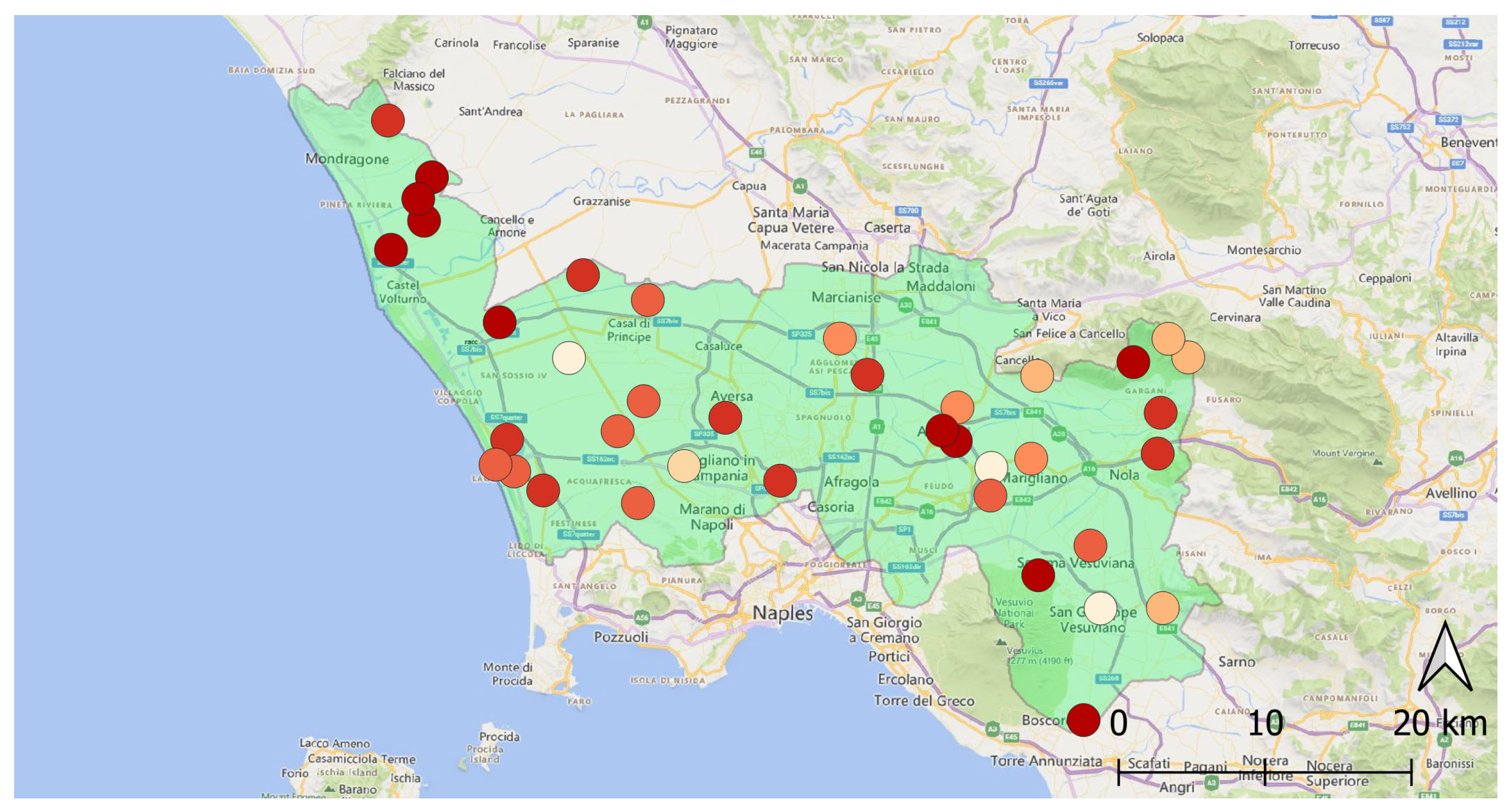
The output of the risk assessment workflow is shown in Figure 7. Specifically, the map represents the risk induced by the hazard, considering both the confirmed and unconfirmed dumping sites. The darker the color of the dot, the higher the risk associated with the hazard.
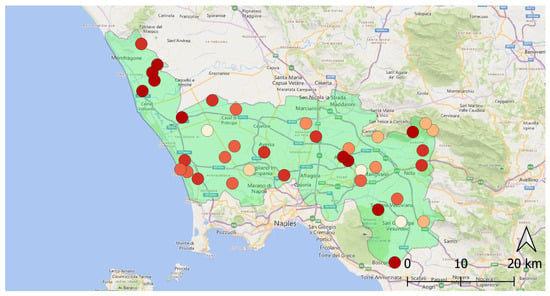
Figure 7.
Map of the risk induced by the specific hazard for each site detected by satellite data analysis independently from their confirmation. The darker the color, the higher the risk.
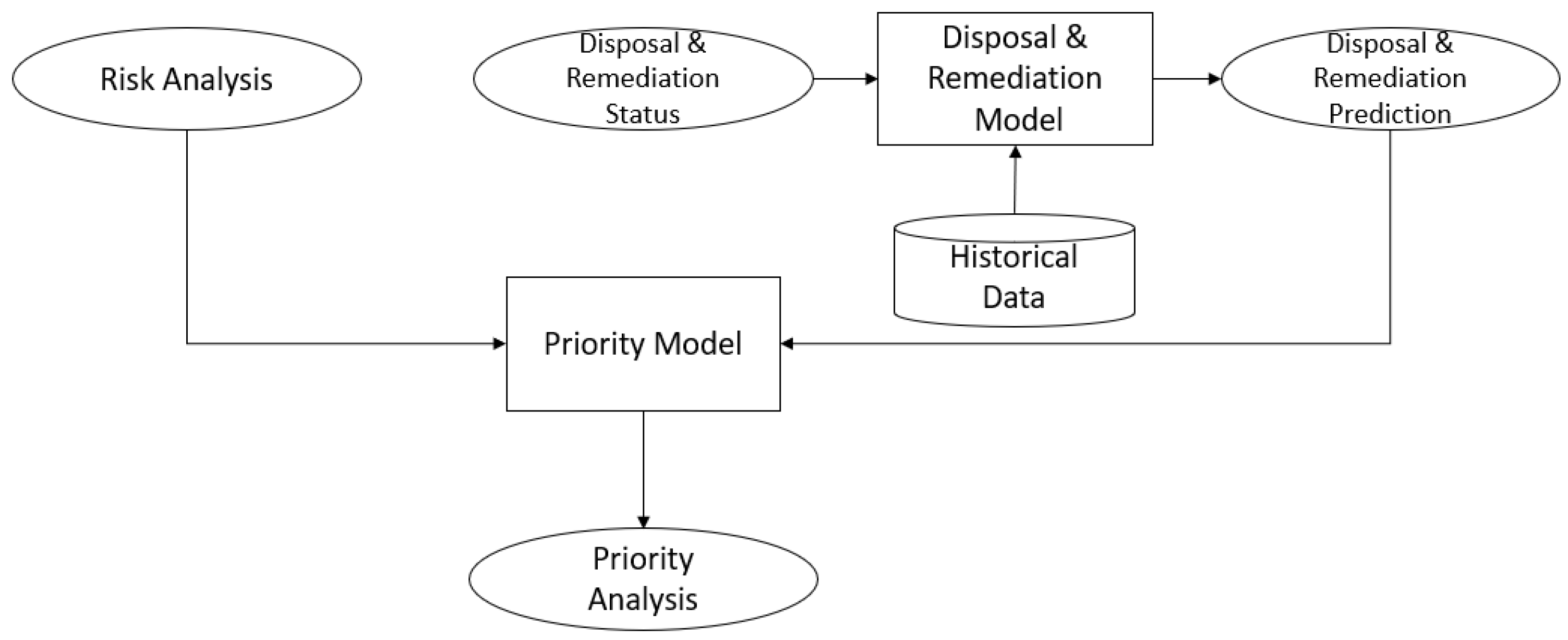
3.5. Step 4: Priority Analysis
The above-introduced risk map is the starting point for defining the inspection priority. It refers to the need to inspect a detected site to confirm and characterize it. This concept connects monitoring activities with the final objective of the application, i.e., the restoration, and includes both the risk induced by the hazards and the risk mitigation effect connected to site inspection, which is expected to trigger restoration interventions after reporting to the authorities.
The inspection priority associated with each site is quantified as the expected reduction in the risk induced by the specific hazards in the cell as a result of on-site inspections and reporting. This makes the concepts of priority and risk different. A cell that is characterized by high risk but which has been recently inspected has a low priority; the return of the patrols is not expected to produce any risk mitigation because a report about the area should have already been produced.
As shown in Figure 8, in which the shapes of the blocks have the same meaning as those in Figure 6, the evaluation of the inspection priority involves historical data and statistical considerations about the temporal dynamic of the illegal dumping phenomenon, which are used to calculate an intervention time since the first reporting and a risk mitigation curve. Then, the inspection priority, , is defined by the algebraic difference between the expected unmitigated risk, , and the expected mitigated risk, after a predefined time span corresponding to the minimum revisit time of ground patrols. Mathematically, it holds
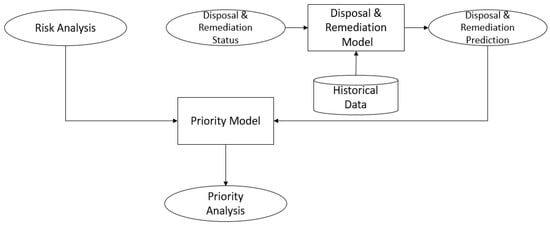
Figure 8.
Workflow for the calculation of the inspection priority.
Since on-the-ground patrolling is typically performed for both the characterization of known sites and the discovery of new ones, relatively large areas are usually explored in a single mission. Therefore, as discussed in Section 2, the study area is tessellated into inspection cells. Therefore, beyond the inspection priority of the site, the one for the cell should be introduced. This is obtained by summing up the inspection priorities of the sites contained within a cell. This value is weighted for the contribution of undetected micro-dumps, which can be estimated from micro-dumps generation dynamics (see Section 4 for details) and the performance of the detection algorithm. If detailed historical data are available, they can be used to fit the model depending on the location of the cell.
In other words, it is assumed that the inspection priority of the cell is composed of three contributions according to the following relation:
where , , and represent the inspection priorities related, respectively, to confirmed, detected, and undetected dumps for the whole cell. Assuming, within the cell, the number of confirmed dumping sites, the number of detected ones and the estimated number of undetected dumps, the previous equation can be rewritten as follows
where is the false discovery rate of the detection algorithm.
The inspection priority of confirmed micro-dumps is evaluated based on characterization data collected by ground patrols. The priority related to detected micro-dumps can be estimated from current and historical data concerning the specific geographical location. The priority associated with the undetected micro-dumps can be estimated from the averages of the current and historical data over the whole inspection cell. The obtained priority map for the study area is shown in Figure 9.
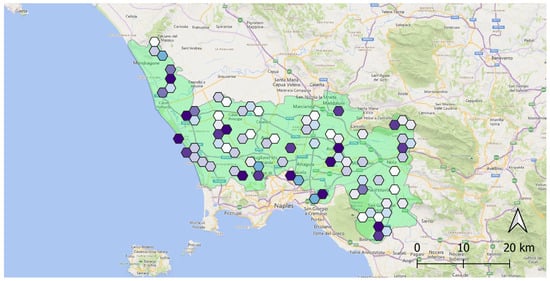
Figure 9.
Inspection priority map for selected inspection cells. The darker the color, the higher the inspection priority.
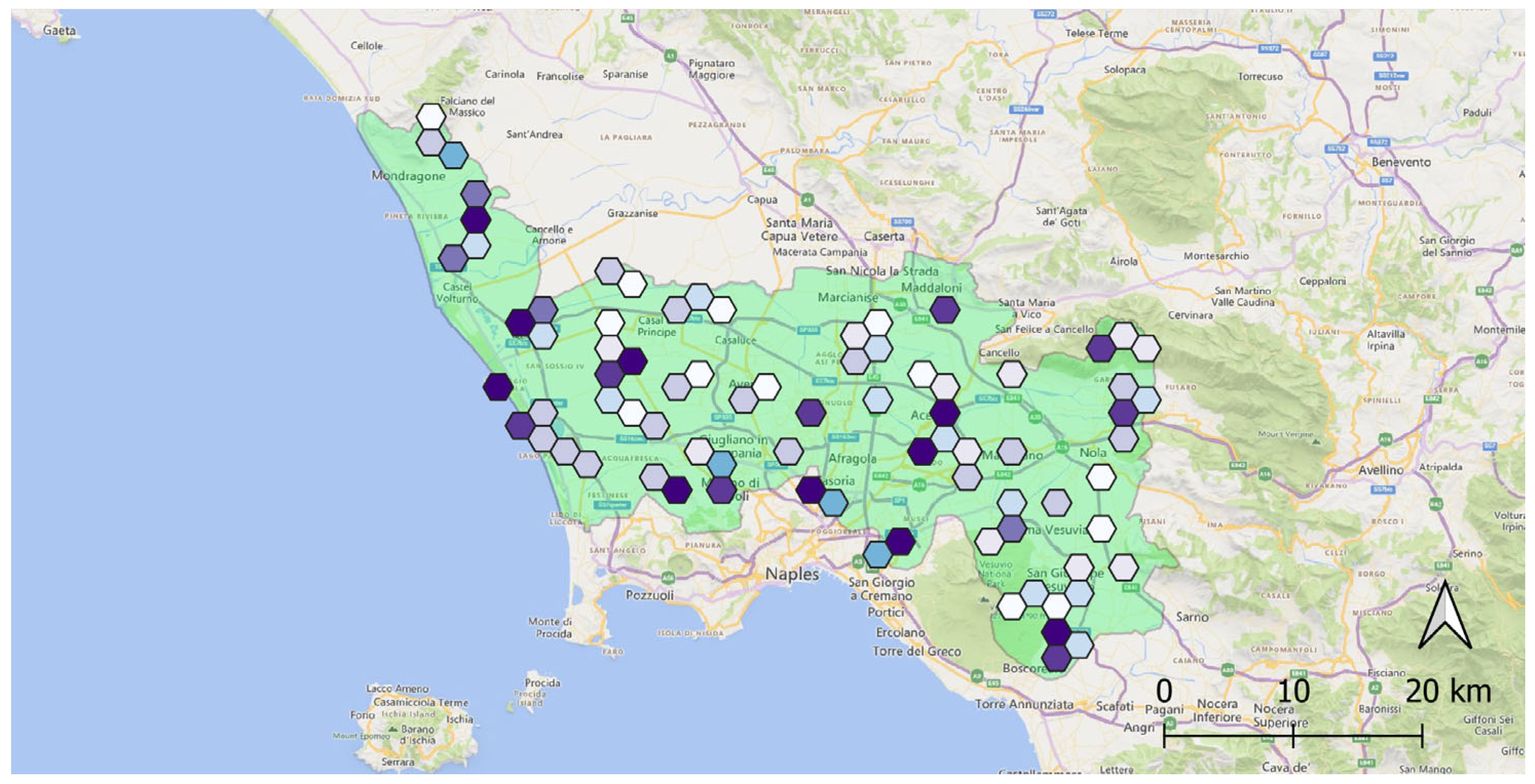
3.6. Step 5: On-the-ground Resource Allocation and Vehicle Routing
Once the highest priority cells have been identified, it is necessary to manage the available patrolling resources to reach the sites to be confirmed and characterized. The constraints to be considered are the number of vehicles, their starting points, and the time required for travel and inspections.
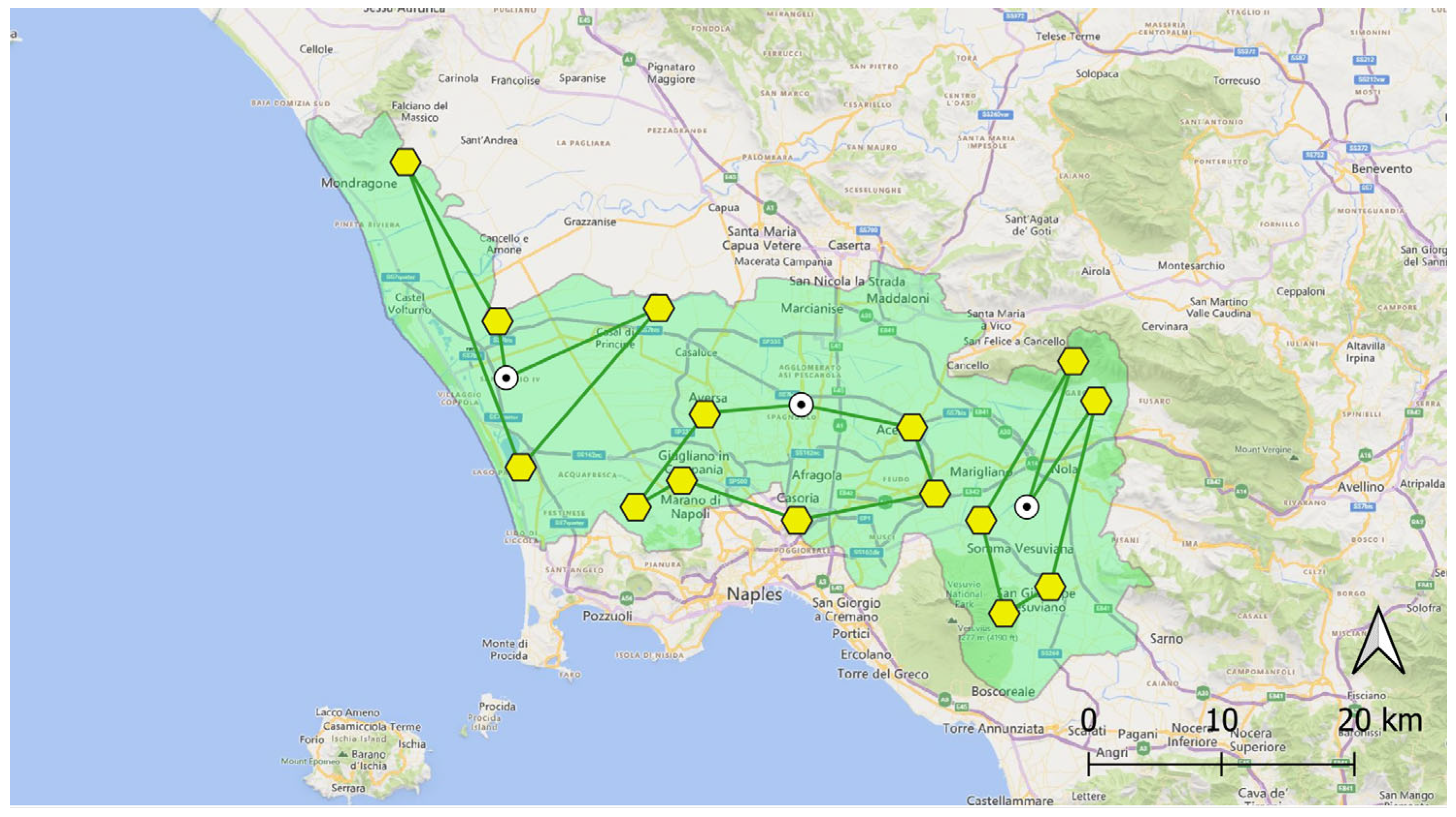
To this end, an algorithm is formulated to determine, for each patrol, the set of cells to be explored that maximize the overall priority index. Calculations are performed under some time constraints, like, for example, the work shifts of the operators. This problem belongs to the class of the so-called vehicle routing problems (VRPs) [28], which are NP-hard problems. A system of reduced complexity to assign resources based on the inspection priority is described in [21,34]. Once the algorithm has provided the sets of cells assigned to each patrol (inspection plan), the traveling salesperson algorithm (TSP) [39] is used to determine the patrolling order of the cells, which constitutes the final output of the system, named the routing plan. An example routing plan, corresponding to the inspection priority map depicted in Figure 9 and obtained under the hypothesis that three patrols are available, is shown in Figure 10.
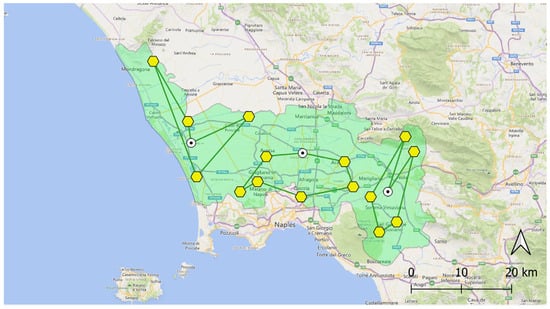
Figure 10.
The routing plan obtained from the inspection priority map depicted in Figure 9. It has been produced under the hypothesis of the availability of three patrols. Yellow hexagons identify the sites to be inspected by the patrols. White dots represent their starting points.
4. System Dimensioning through a Simulation Approach
The assessment of the whole system’s performance, which should be evaluated in terms of the number of restored sites and/or restoration time after the detection, would require the system to be operative for a significant observation time, allowing for the comparison against traditional patrolling. This approach is not feasible because (i) the proposed approach is not yet fully operational and (ii) the analysis of the collected observations would not allow for separating the effects of effective monitoring from those connected to on-the-ground remediation activities.
For these reasons, the performance of progressive monitoring will be evaluated in a simulation environment against different key parameters of the satellite detection system like the acquisition period of new products or the performance of automatically generated detection maps. The purpose is to provide a methodological approach to compare the proposed progressive monitoring system, digitalized using the DSS, with traditional on-the-ground monitoring and to evaluate its effects on subsequent restoration activities.
4.1. Statistical Model
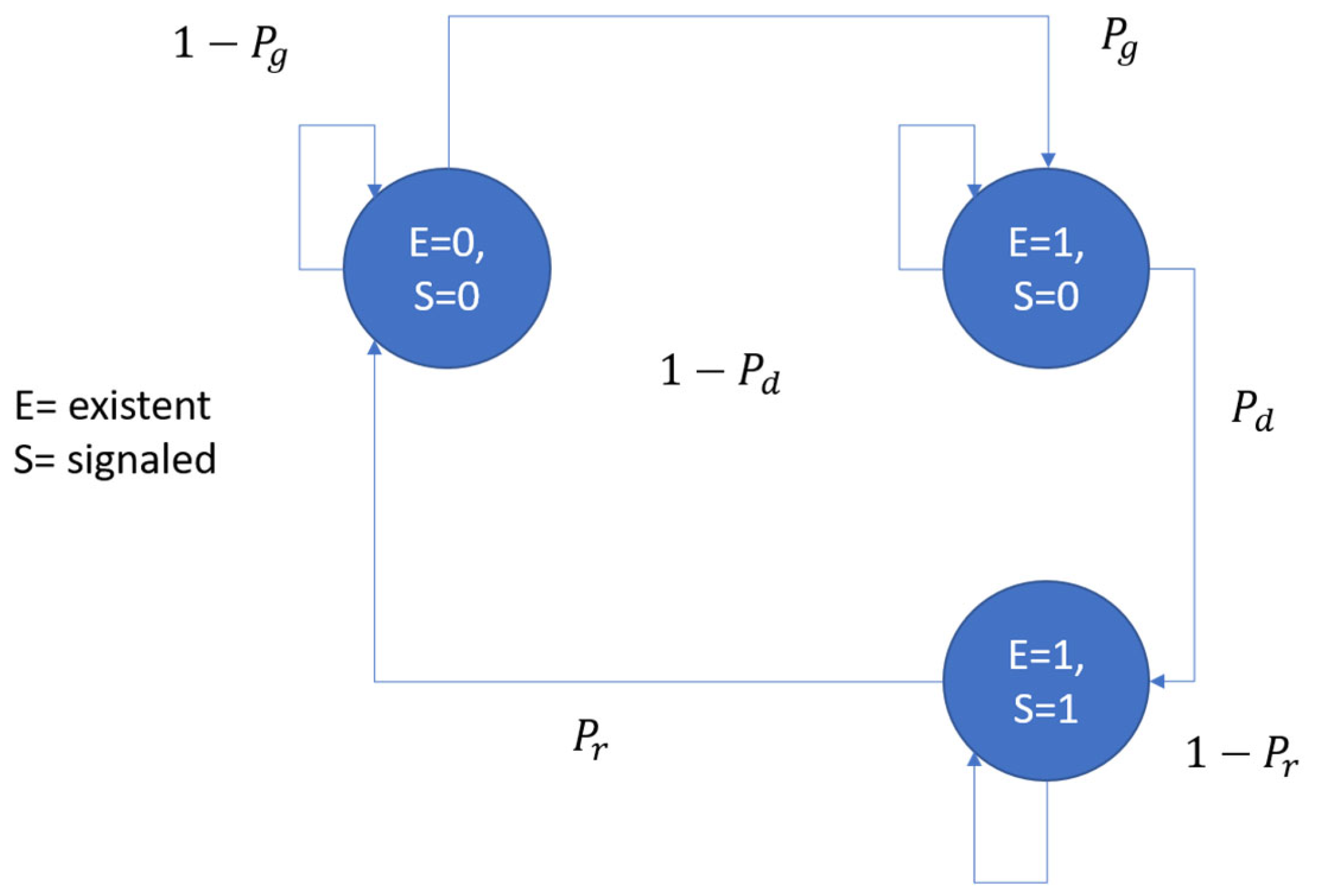
As suggested in [20], simulations were implemented considering the micro-dump generation and the restoration processes as part of a larger first-order Markov random chain with unobserved states [40,41], whose schema is represented in Figure 11. It is a finite-state machine with probability associated with state transitions. Reporting activities enabling restoration actions are included in the model. The system states are represented by the vector of components “E” (existent = 1, not existent = 0) and “S” (signaled for restoration = 1, not signaled = 0). The transition probabilities of the process are defined by the generation probability and the restoration probability. The probability of discovery is related to the monitoring system’s performance, whether it is traditional or progressive.
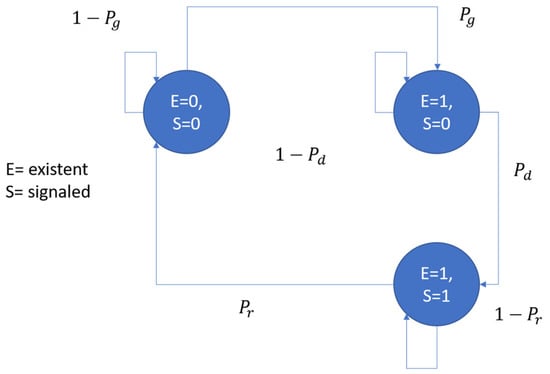
Figure 11.
Micro-dump generation, discovery, and restoration processes modeled as a Markov random chain. The associated state can be existing/not existing (E) and signaled/not signaled (S).
The state transition probability matrix of the Markov random chain, denoted with , is reported in the following equation, representing a transformation of column vectors indicating the probability of the three states of the model:
Such transition probability matrix depends only on vector ϑ of independent parameters expressing the conditional probabilities of the model:
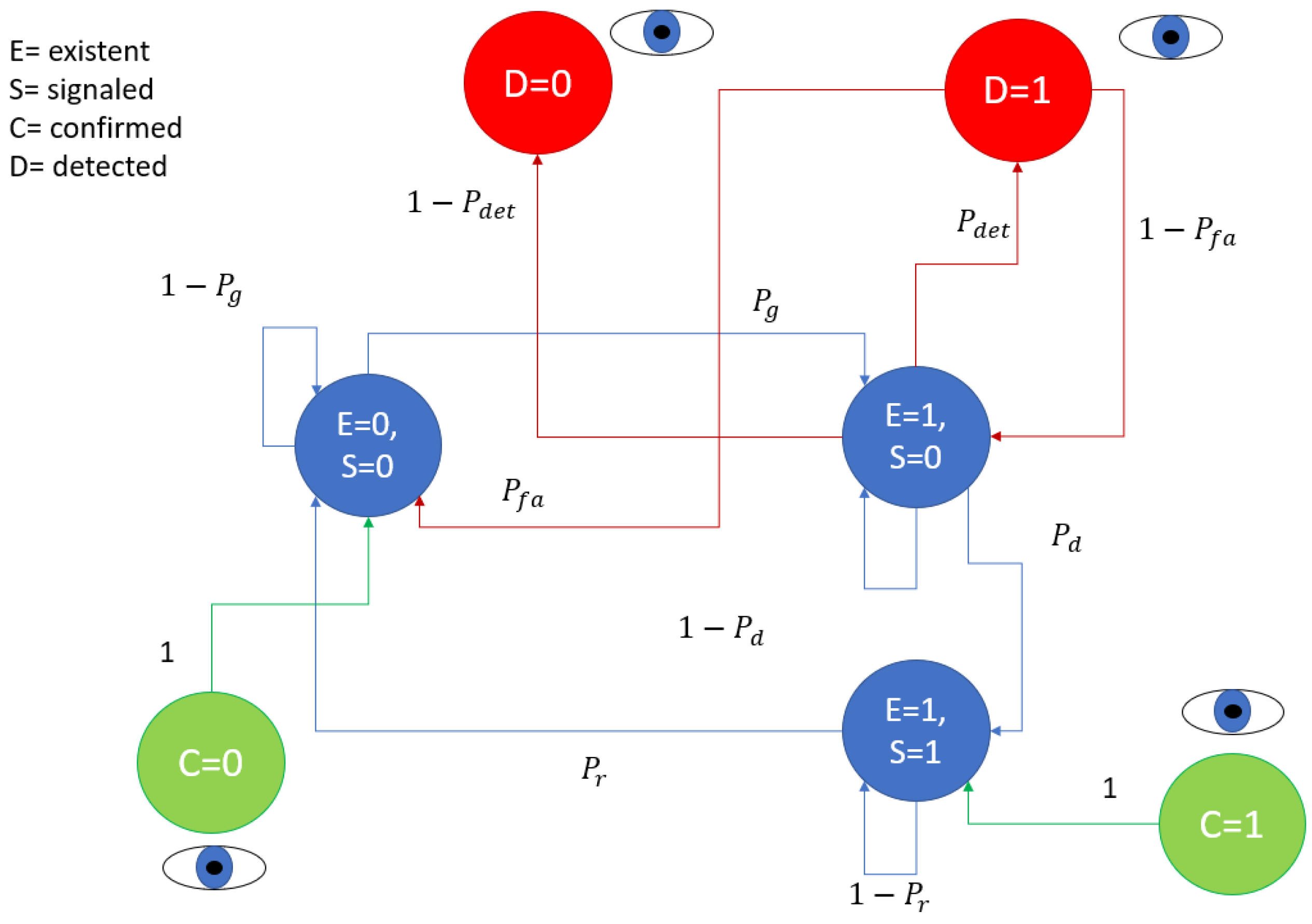
In the absence of observations, the probability of discovery can be improved by introducing a state estimator of the unobserved states (see Figure 12), as suggested in [42].
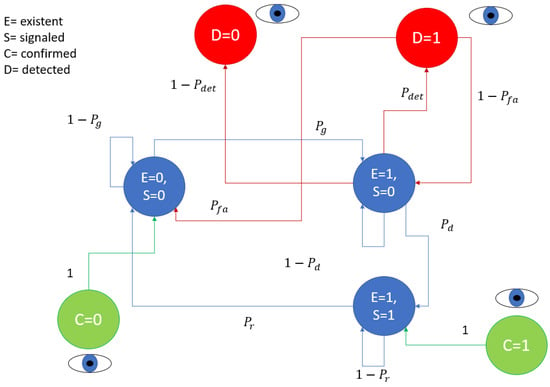
Figure 12.
State confirmation by patrolling (C = confirmation) and state observation through the satellite detection system (D = detection).
As shown in Figure 12, the drifts in state estimation due to the inaccuracy of the model can be recovered through direct state observations. They are obtained thanks to ground patrolling (traditional monitoring) and/or satellite acquisitions (progressive approach), each of them having their own scheduling and information confidence level.
When an on-the-ground inspection is performed on a dumping site (see Figure 12), the existence of micro-dumps E(t) at time t is directly observed and its probability is updated to 1 or 0, respectively, whether the micro-dump is confirmed or not. Mathematically, it holds
When observation D from the satellite detection maps is available at the current time t (see Figure 12) the following relations are applied
where the notation indicates the prediction obtained using the Markov random chain hypothesis. The second equation simply results from the direct application of the Bayes theorem and the definition of the recall:
considering that when the state is currently observed.
is a prediction obtained using the Markov random chain hypothesis considering all the available current and previous observations . However, since signaling has no instantaneous effect on dump existence, it depends exclusively from . When S changes, the change is directly observed, so that can be omitted in the expression of
When no detections or confirmations are collected at the current time, t, the existence of micro-dumps is predicted by a state estimator of the Markov random chain, i.e.,
where the probability of is calculated as
in which can be evaluated based on the transition probability matrix of the Markov random chain described by Equation (13) and the probability is obtained from the last available observation, as detailed by Equations (8) and (9).
In particular,
where represents the probability that a confirmed clean site is currently subject to dumping, is the probability that a confirmed dumping site is still unrestored, and represents the existence of the dumping phenomenon when satellite data are currently available as estimated by Equation (16). When ground patrols report direct observations, Equation (15) is applied instead.
The complementary probability can be easily calculated from the previous expressions.
4.2. Model Validation on the Case Study
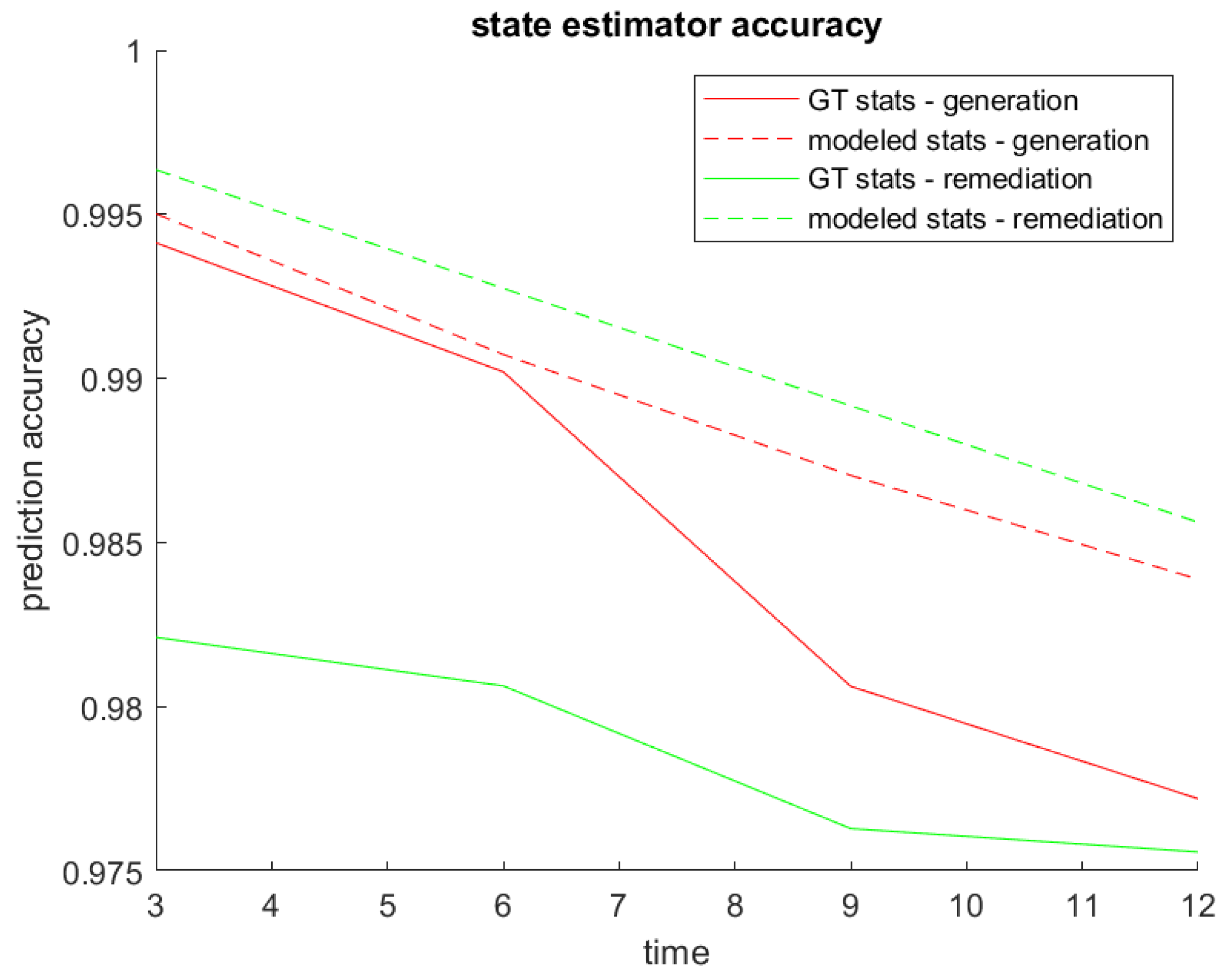
The above discussed model has been fit using real-world data from the “Land of Fires” case study collected from March 2019 to June 2019. In Figure 13, it is shown the prediction accuracy of from the states (generation prediction) and from (restoration prediction) after a time lapse expressed in months. In particular, solid curves express the prediction accuracy of the proposed Markov chain model validated on ground truth data, while dashed ones indicate the theoretical expectation obtained using the proposed model with an analytical approach.
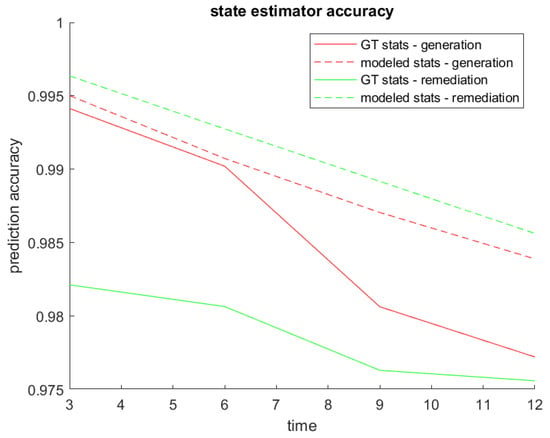
Figure 13.
Accuracy of the proposed state estimator based on the first-order Markov chain model and ground truth statistics plotted as a function of the prediction time.
The analytical model assumes the following: (1) the data statistics are those calculated for the case study; (2) the transition dynamics of the states are those of the proposed model; (3) the maximum likelihood decision rules are employed to estimate future states at time starting from the directly observed state at time .
The purpose of Figure 13 is to show how the non-ideality of the dynamics affects the prediction performance. In fact, even if the real-world dynamics were perfectly known and corresponded to a first-order Markov chain, making predictions with fixed decision rules on random variables would result in decision errors.
The graph compares the errors committed in case the data respected the hypotheses underlying the proposed model with those made using real data not exactly respecting the dynamics of this model. In this way, in a real-world case study, we can quantify the loss of accuracy caused by approximating the dynamics of the model with a first-order Markov chain. However, the excellent performance of the state estimator under first-order Markov chain hypothesis against real-world data confirms the reliability of the model.
This consideration leads us to hypothesize that a first-order Markov chain can fit with other scenarios. However, the following considerations on the monitoring system do not depend on the complexity of the adopted model and can also be extended to higher-order Markov chains, if needed by the description of the specific scenario.
4.3. Numerical Simulations
Numerical simulations are exploited to analyze the impact of the DSS parameters on the performance of the restoration process, quantified by the probability that a certain inspection cell is affected by dumping, and to compare it with that provided by traditional on-the-ground monitoring. It is assumed that the dynamics of generation and restoration processes (in terms of statistical models) are not influenced by monitoring actions. This means that possible effects of the adoption of advanced monitoring, like the deterrence from opportunistic illegal dumping, are not considered. In the same way, it is assumed that the restoration capacity of the public authority is not impacted by the availability of more refined risk maps, due to the limited resources allocated for such activities. It is therefore assumed that an indefinite increase in the reporting of micro-dumps to be removed cannot lead to saturation of the restoration capacity of the local administrations.
It is important to highlight that simulations are implemented at the inspection cell scale, thus considering the corresponding micro-dump detection performance [30]. The details of the simulation parameters are reported in Table 2.
Table 2.
Default parameters for monitoring performance simulation.
To make the simulations completely reproducible, some model hypotheses have been simplified. For example, the risk statistical distribution over the cells has been modeled with a uniform probability distribution. The vehicle routing system has not been used, considering valid all the inspection plans that optimize the assignment deriving from the priority analysis without any geographical constraints due to routing feasibility.
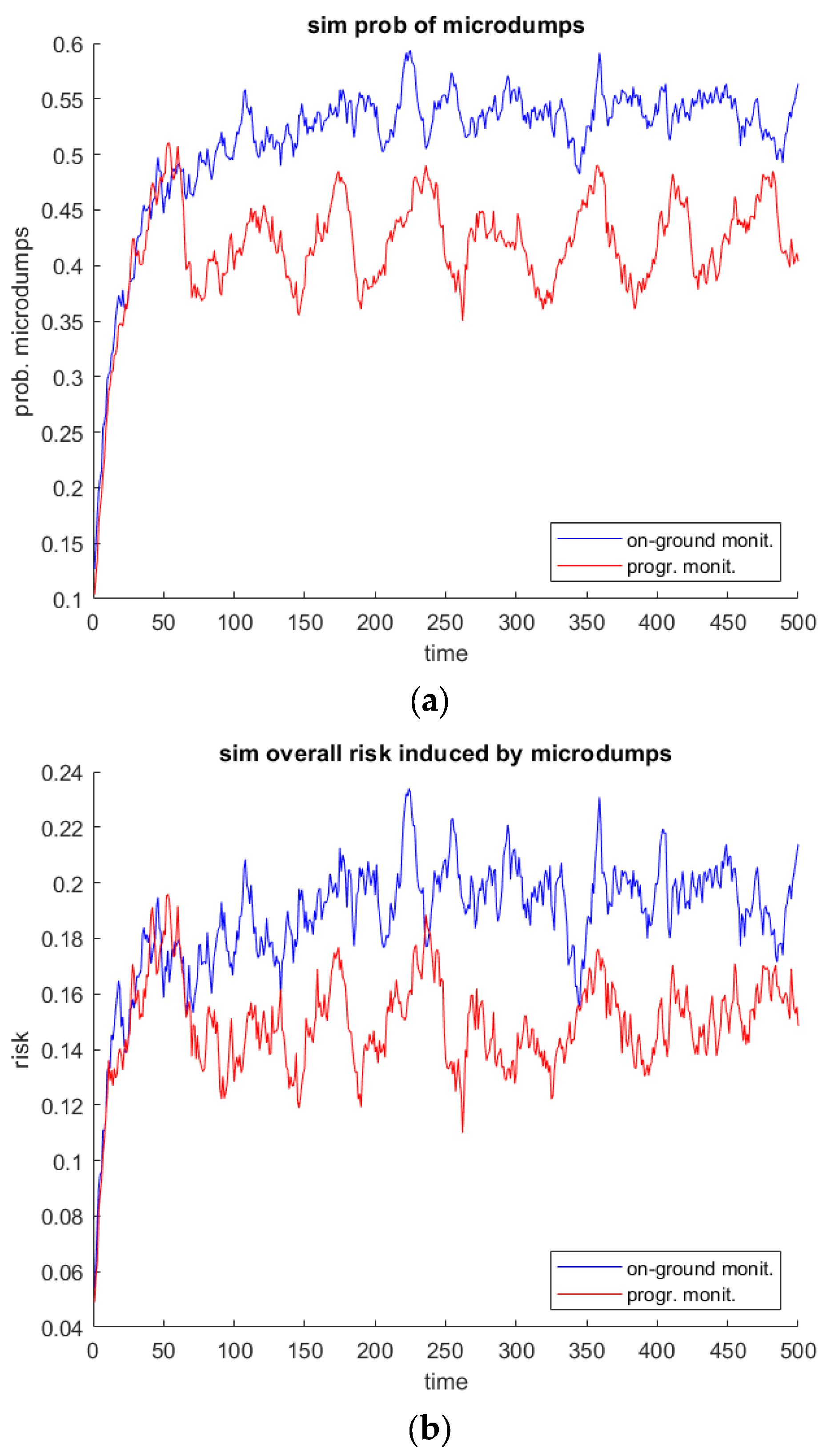
The graphs depicted in Figure 14a report the simulated probability (considering the simulation ground truth) that an inspection cell is affected by dumping using traditional monitoring (blue curve) and the progressive approach (red one). To consider a global performance parameter against the simulated scenario, the graph reports the average performance across all cells.
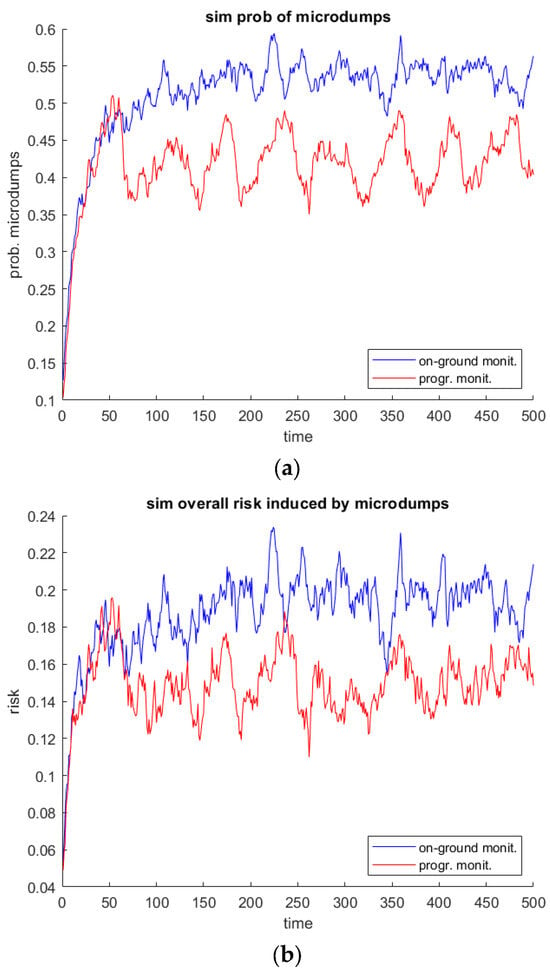
Figure 14.
(a) The probability that inspection cells are affected by the micro-dumps using traditional monitoring (blue curve) and the progressive approach (red curve). (b) Environmental risk level obtained by using traditional monitoring (blue curve) and the progressive approach (red curve).
The periodicity of the performance of the progressive monitoring is due to the assumed periodic availability (with period ) of satellite detection maps. The better performance of the proposed satellite aided solution is due to the improvement of the discovery probability , otherwise determined only by the territory coverage speed of the on-the-ground patrolling. In Figure 14b the overall environmental risk over the monitored area is evaluated as follows:
where is the overall risk induced by the hazards of the k-th inspection cell.
The average reduction in the environmental risk against time represents, from the point of view of the end user, the requested improvement for the adoption of the proposed remote sensing technologies in the monitoring process. The probability that cells are affected by micro-dumping, depicted in Figure 14a, can be considered a related less accurate figure of merit. As shown in Figure 14b, the reduction in the probability that cells are affected by dumping results in a lower environmental risk in the case of the adoption of the progressive approach. It is worthwhile to remark that, as discussed in Section 3, the risk is determined by all the dumps affecting the cells within the study area and obtained by averaging the risks associated with each of them.
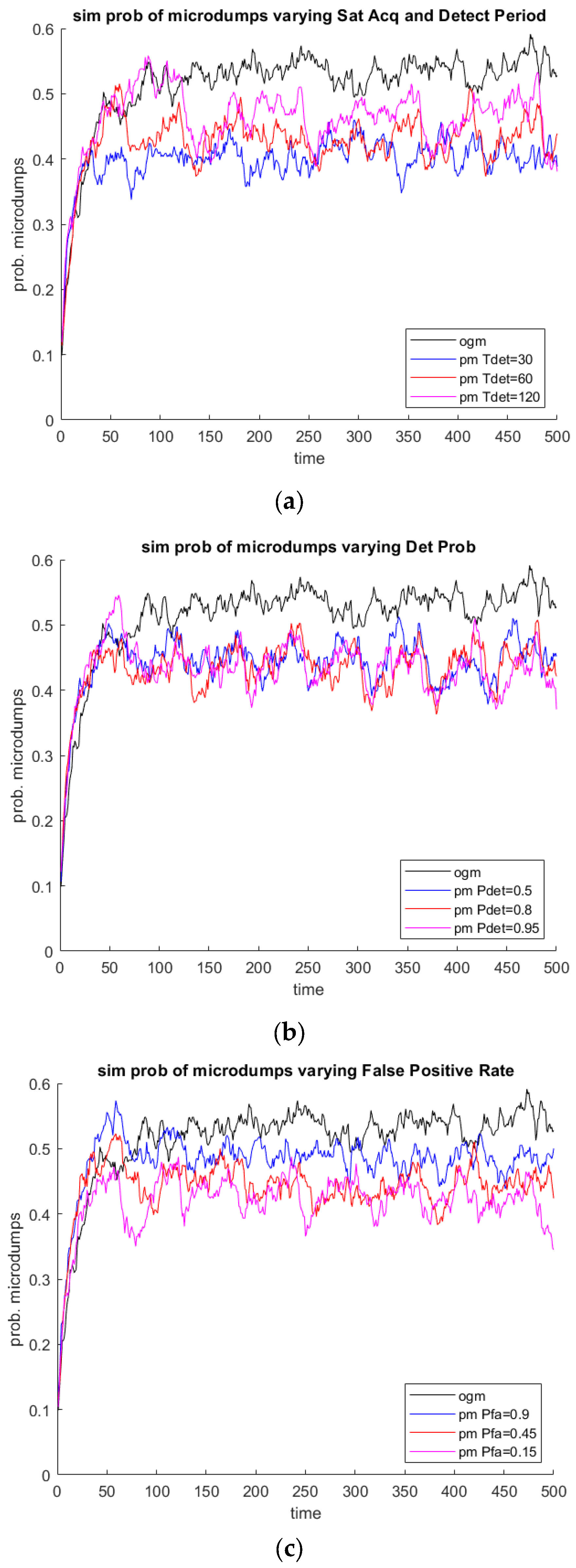
As aforementioned, traditional monitoring’s performance depends essentially on the capability of discovering and signaling a dumping site for restoration during the on-the-ground patrolling phase. Using the progressive approach, such probability depends on at least three parameters related to remote sensing products: the time span between the acquisition of new data and the precision and recall of the automatic detection algorithm.
First, the effects of increasing the frequency of ingesting new satellite detection data into the DSS are analyzed. The simulation results are reported in Figure 15a. The black curve, indicating the performance of traditional monitoring, which is independent of this parameter, is the same as Figure 14a and is reported for the ease of the reader.
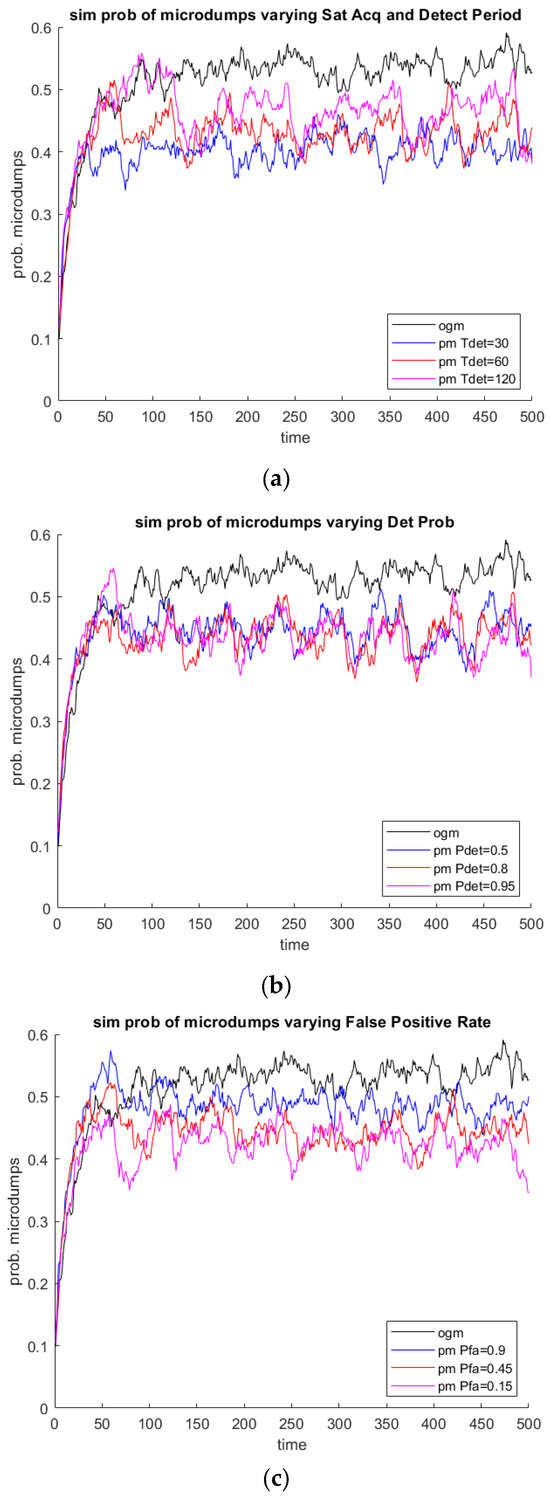
Figure 15.
Simulated performance of the monitoring system varying (a) the ingestion period of new satellite data, (b) the detection probability, and (c) the false alarm probability of the automatic detection algorithm.
As expected, the dumping probability decreases as the frequency of data acquisition increases, as more sites are discovered by the automatic detection algorithm, whose performance is the one indicated in Table 2. It is intended that, with the waste removal rate being fixed, the potential of the system is not fully exploited, i.e., the accumulation of unremoved waste prevents the monotonic decrease in the probability which exhibits, in all the cases, an oscillating trend around a constant average value.
In Figure 15b,c, the analysis is performed by varying, respectively, the probability of correct detection and the false positive rate of the micro-dump detection algorithm. As expected, the probability of the existence of a dump within a cell increases as the recall of the algorithm increases and as its false positive rate decreases. In fact, the more accurate the algorithm, the higher the probability that patrols are directed towards areas really affected by dumps, that can be suddenly confirmed and reported for successive restoration.
Figure 15b shows that recall moving from 0.50 to 0.80 improves the restoration performance appreciably, while it is less effective rising up to 0.95. This is because the estimate of the presence of micro-dumps is also positively influenced by the confirmations made during the previous phases of on-the-ground patrolling.
The sensitivity of the restoration performance in the simulated scenario instead seems more dependent on the false positive rate (see Figure 15c). For example, the performance improvement is very clear, moving from a false positive rate of 0.9 to a false positive rate of 0.45. In fact, satellite detections tend to overwrite the information of dumps absence coming from previous field assessments. Therefore, a significant false positive rate significantly reduces the effectiveness of the discovery.
It is interesting to remark that, as expected, the restoration rate and the generation rate are constraints for the overall monitoring and restoration process, which cannot benefit indefinitely from improving the monitoring system’s performance. The use of satellite data can improve the probability of discovery, thus triggering faster restoration actions; obviously, this does not allow for directly mitigating factors, such as the recidivism of illegal dumping phenomena and the delay in waste removal actions.
5. Discussion
The digital transformation of society and economy is a crucial development of the 21st century and involves any area of everyday life, including waste management [43]. Digital technologies, including remote sensing, promise a more effective service delivery and allow for improved territory monitoring, which is the basis for preventing and enforcing unlawful conduct [42].
Traditionally, illegal waste monitoring is based on citizens’ voluntary reporting, which solicits dedicated patrolling toward specific locations. However, this model demonstrated its weakness, being fed by unstructured, sparse, and untrusted information that currently cannot be quickly used as a trigger for restoration actions. With the current approach, such information is unable to impact the reaction times of the public administration, which are generally very slow [44,45].
As argued in [46], there is a strong need for innovative illegal waste monitoring and management strategies allowing for the shift from traditional paradigms towards more effective solutions. In this regard, remote sensing technologies play a central role, especially in the detection of potentially affected sites [5,15,47,48,49]; but, as in the case of citizen voluntary reports, the gathered inaccurate information must be quickly and safely integrated into the current monitoring processes that need on-the-ground confirmation and characterization of the dumping sites as the final step before the triggering of the restoration phase.
The concept of progressive monitoring discussed in Section 3 is not new in the literature, as it can be seen as a specification of the multiscale remote sensing paradigm [50]; but, to the best of our knowledge, this is the first application to waste monitoring and management problems. However, this is not the main novelty introduced by our model. In fact, for the first time, remote sensing technologies constitute a brick of a more complex system organically tackling illegal dumping phenomena, in which the information flow is managed and progressively structured from the acquisition of raw data (images) up to the design of a route for patrols in charge of restoration. The process, in the first phase, is powered by the more recent advances in artificial intelligence for target recognition [15,49], but does not exclude the intervention of human operators [5], which are required to inspect the automatically produced detection maps to generate higher-confidence data representing the base for the building of the routing plan, which constitutes the innovative output of the proposed DSS.
The digitalization of the whole information process for illegal waste monitoring, also related to the subsequent restoration phase, is therefore the principal novelty of the paper and it is new in the literature to the best of our knowledge. In such a digitalized monitoring process, remotely sensed data, intrinsically carrying inaccurate and incomplete information, are treated homogeneously to produce confirmed data. Confirmation activities are considered completely asynchronous against remote sensing inputs. The synergistic use of information sources of varying completeness and accuracy is made possible by associating these reliability parameters with all available data. In this regard, the performance simulator introduced in Section 4 is a tool useful for system dimensioning and ex-ante comparison against traditional monitoring approaches and alternative strategies.
As suggested in the literature [20], the micro-dump generation and the restoration processes were modeled as parts of a larger first-order Markov random chain with unobserved states [41]. The simulation environment is obviously constrained by some simplifying hypotheses, but it enables an understanding of the bottlenecks of the proposed approach.
In particular, two aspects have been considered, i.e., the time span between the ingestion of new satellite data and the accuracy of the automatic detection algorithm. As expected, the probability that an inspection cell is affected by micro-dumping tends to decrease as the performance of the satellite detection system increases. In fact, a higher frequency of data ingestion allows for the timely detection of new dumps. In the same way, a more accurate detection map is beneficial for outlining the routing plan, thus avoiding the fact that patrols are directed toward areas that are not affected by environmental risks.
In all cases, the average probability of the presence of micro-dumps resulting from the proposed monitoring approach outperforms the one obtainable by means of traditional monitoring. All the curves show the same periodicity of the satellite acquisitions because they help on-the-ground operators in discovering the majority of micro-dumps before the recurrent phenomenon of dumping takes over.
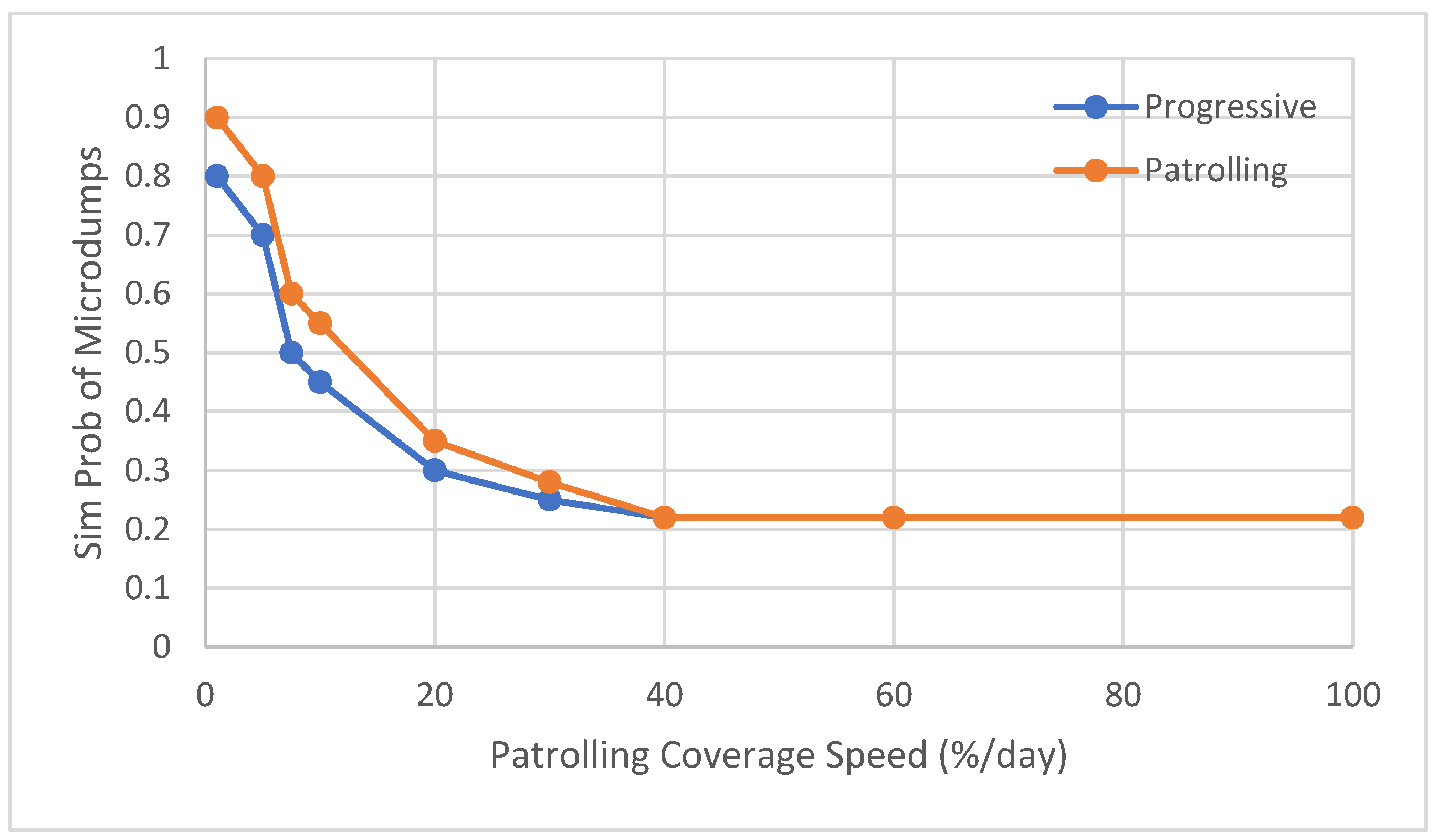
The benefit provided by satellite monitoring is appreciable if it increases the probability of discovery. However, this advantage will disappear as the on-the-ground resources used for patrolling are increasingly used. As shown in Figure 16 progressive monitoring outperforms traditional monitoring until the rate of territory coverage reaches 40% per day. This means that, as expected, when the number of patrols is sufficiently high, the use of remote sensing is no more beneficial. Therefore, the proposed simulation approach helps to understand which solution allows for higher savings in terms of budget allocation.
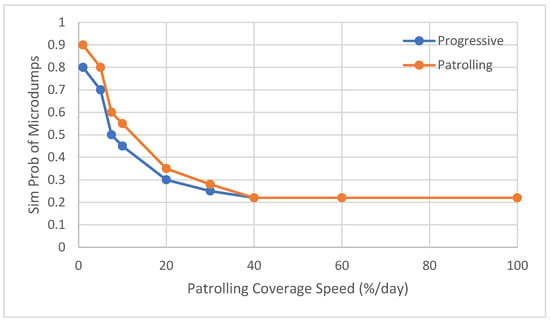
Figure 16.
The probability that inspection cells are affected by illegal dumps using progressive monitoring (blue curve) and the traditional approach (orange curve) varying the percentage of visited sites per day.
The presented results are useful in building a better understanding of the fact that the tackling of illegal dumping phenomena is strictly related to economic considerations. In the case of traditional monitoring, the costs are determined by the number of patrols. Using remote sensing, the cost of the data and expert operators shall be considered. Therefore, the message to be conveyed to public managers is the following. The adoption of an advanced monitoring system allows for reducing the environmental risk connected to the presence of illegal dumps for a given number of available patrols. As this number increases, as well as the budget for patrolling, the usefulness of remote sensing is reduced. The equilibrium point, i.e., the equivalence between traditional and satellite monitoring, is, however, typically reached for an unreasonable number of patrols, which makes this option inviable.
To conclude the discussion, we provide a final comment on the cost of satellite data. For the case study of the Land of Fires, whose extension is about 1000 km2, the price for 30 cm resolution data covering (in tasking) the whole area would be around EUR 30,000, without any agreement with data providers. The ingestion of data on a quarterly basis would result in a yearly expense of less than EUR 100,000. Such an amount is not negligible, and is all the more related to the relatively small area. On the other hand, Italy is under European sanctions due to insufficient environmental recovery, costing somewhere in the region of EUR 120,000/day.
6. Conclusions
An integrated solid waste management system aiming at tackling illegal dumping activities should consider the specificity of the phenomenon, which involves targets whose quantity, location, and composition are not known a priori. This work proposed a new decision support system fed by remote sensing data whose objective is to enhance the discovery of such unknown targets. The monitoring is implemented using a progressive (e.g., multiscale) approach, in which data, acquired by different platforms with increasing spatial resolution, contribute to generating the information needed to establish proper routing for ground patrols and, consequently, the priority for restoration activities.
A simulation approach has been introduced to evaluate the impact of the diverse process parameters on the restoration performance. This tool is useful for the appropriate design of the monitoring system and enables the in-advance quantification of the advantages it holds in comparison with traditional on-the-ground methods.
Author Contributions
Conceptualization, L.C.; methodology, L.C. and F.G.; methodology review and validation, S.P., D.A. and L.C.; software development, F.G., G.P. and L.C.; performance analysis, L.C.; writing—original draft preparation, L.C.; writing—review and editing, D.A. and S.P.; supervision, L.C.; project administration, L.C.; funding acquisition, L.C. and F.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work has been funded by the Italian Ministry of University and Research (MUR) and the European Regional Development Fund (ERDF) of the European Commission, trough the National Operative Plan (PON) ‘‘Research & Innovation’’ 2014/2020 for the specialization area "Smart, Secure and Inclusive Communities”, under the aegis of the project “Crowd for the Environment” (C4E).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request.
Acknowledgments
We thank the president of SMA Campania Tommaso Sodano and the General Director of ARPAC Stefano Sorvino for the participation of their two organizations in the project C4E advisory board. We also sincerely thank the members of the advisory board Francesco Pirozzi (SMA Campania) and Roberto Bardari (ARPAC) for discussing the application scenario. A special thanks to the information systems manager of SMA Campania, Generoso Marrandino, for providing data used for model validation, and thanks to the technical director of ARPAC Claudio Marro for usefully joining to the discussion.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Garofalo, D.; Wobber, F.J. Solid Waste and Remote Sensing. Photogramm. Eng. 1974, 41, 45–59. [Google Scholar]
- Kaza, S.; Yao, L.; Bhada-Tata, P.; Van Woerde, F. Waste Administration and Operations. In What a Waste 2.0: A Global Snapshot of Solid. Waste Management in 2050; Yao, L., Van Woerden, F., Eds.; World Bank Group: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Mager, A.; Blass, V. From Illegal Waste Dumps to Beneficial Resources Using Drone Technology and Advanced Data Analysis Tools: A Feasibility Study. Remote. Sens. 2022, 14, 3923. [Google Scholar] [CrossRef]
- Saviano, R. Gomorrah; Picador: London, UK, 2017; ISBN 0374165270. [Google Scholar]
- Errico, A.; Angelino, C.V.; Cicala, L.; Persechino, G.; Ferrara, C.; Lega, M.; Vallario, A.; Parente, C.; Masi, G.; Gaetano, R.; et al. Detection of environmental hazards through the feature-based fusion of optical and SAR data: A case study in southern Italy. Int. J. Remote Sens. 2015, 36, 3345–3367. [Google Scholar] [CrossRef]
- Otwong, A.; Jongmeewasin, S.; Phenrat, T. Legal obstacles for the circular economy in Thailand: Illegal dumping of recyclable hazardous industrial waste. J. Clean. Prod. 2021, 302, 126969. [Google Scholar] [CrossRef]
- Liddick, D. The traffic in garbage and hazardous wastes: An overview. Trends Organ. Crime. 2010, 13, 134–146. [Google Scholar] [CrossRef]
- Amitrano, D.; Cicala, L.; Cuciniello, G.; De Mizio, M.; Poderico, M.; Tufano, F. Near Real-Time Volumetric Estimates Using Unmanned Aerial Platforms Equipped with Depth and Tracking Sensors. Sensors 2022, 22, 9462. [Google Scholar] [CrossRef] [PubMed]
- Ulloa-Torrealba, Y.Z.; Schmitt, A.; Wurm, M.; Taubenböck, H. Litter on the streets—Solid waste detection using VHR images. Eur. J. Remote. Sens. 2023, 56, 2176006. [Google Scholar] [CrossRef]
- Torres, R.N.; Fraternali, P. Learning to Identify Illegal Landfills through Scene Classification in Aerial Images. Remote. Sens. 2021, 13, 4520. [Google Scholar] [CrossRef]
- Gasperini, D.; Allemand, P.; Delacourt, C.; Grandjean, P. Potential and limitation of UAV for monitoring subsidence in municipal landfills. Int. J. Environ. Technol. Manag. 2014, 17, 1–13. [Google Scholar] [CrossRef]
- Baiocchi, V.; Napoleoni, Q.; Tesei, M.; Servodio, G.; Alicandro, M.; Costantino, D. UAV for monitoring the settlement of a landfill. Eur. J. Remote Sens. 2019, 52 (Suppl. S3), 41–52. [Google Scholar] [CrossRef]
- Incekara, A.H.; Delen, A.; Seker, D.Z.; Goksel, C. Investigating the Utility Potential of Low-Cost Unmanned Aerial Vehicles in the Temporal Monitoring of a Landfill. ISPRS Int. J. Geo-Inf. 2019, 8, 22. [Google Scholar] [CrossRef]
- Karimi, N.; Ng, K.T.W. Mapping and Prioritizing Potential Illegal Dump Sites Using Geographic Information System Network Analysis and Multiple Remote Sensing Indices. Earth 2022, 3, 1123–1137. [Google Scholar] [CrossRef]
- Parrilli, S.; Cicala, L.; Angelino, C.V.; Amitrano, D. Illegal Micro-Dumps Monitoring: Pollution Sources and Targets Detection in Satellite Images with the Scattering Transform. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium, IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 4892–4895. [Google Scholar] [CrossRef]
- Gutierrez-Lopez, J.; McGarvey, R.G.; Costello, C.; Hall, D.M. Decision Support Frameworks in Solid Waste Management: A Systematic Review of Multi-Criteria Decision-Making with Sustainability and Social Indicators. Sustainability 2023, 15, 13316. [Google Scholar] [CrossRef]
- Melaré, A.V.d.S.; González, S.M.; Faceli, K.; Casadei, V. Technologies and decision support systems to aid solid-waste management: A systematic review. Waste Manag. 2017, 59, 567–584. [Google Scholar] [CrossRef] [PubMed]
- Boffardi, R.; De Simone, L.; De Pascale, A.; Ioppolo, G.; Arbolino, R. Best-compromise solutions for waste management: Decision support system for policymaking. Waste Manag. 2021, 121, 441–451. [Google Scholar] [CrossRef] [PubMed]
- Di Nola, M.F.; Escapa, M.; Ansah, J.P. Modelling solid waste management solutions: The case of Campania, Italy. Waste Manag. 2018, 78, 717–729. [Google Scholar] [CrossRef]
- Jiang, P.; Liu, X. Hidden Markov model for municipal waste generation forecasting under uncertainties. Eur. J. Oper. Res. 2016, 250, 639–651. [Google Scholar] [CrossRef]
- Vargas, A.P.; Díaz, D.; Jaramillo, S.; Rangel, F.; Villa, D.; Villegas, J.G. Improving the tactical planning of solid waste collection with prescriptive analytics: A case study. Production 2022, 32, 20210037. [Google Scholar] [CrossRef]
- Buzzo, G.; Gigante, G.; Nebula, F.; Palumbo, R.; Pascarella, D.; Vozella, A. Risk Assessment for Illegal Waste Open Burning. E3S Web Conf. 2021, 241, 03005. [Google Scholar] [CrossRef]
- Şener, S.; Sener, E.; Karagüzel, R. Solid waste disposal site selection with GIS and AHP methodology: A case study in Senirkent–Uluborlu (Isparta) Basin, Turkey. Environ. Monit. Assess. 2011, 173, 533–554. [Google Scholar] [CrossRef] [PubMed]
- Pizzolante, A.; Nicodemo, F.; Pierri, A.; Ferro, A.; Pierri, B.; Buonerba, C.; Beccaloni, E.; Albanese, S.; Basso, B.; Cerino, P. Development of a municipality index of environmental pressure in Campania, Italy. Futur. Sci. OA 2021, 7, FSO720. [Google Scholar] [CrossRef] [PubMed]
- Tasaki, T.; Kawahata, T.; Osako, M.; Matsui, Y.; Takagishi, S.; Morita, A.; Akishima, S. A GIS-based zoning of illegal dumping potential for efficient surveillance. Waste Manag. 2007, 27, 256–267. [Google Scholar] [CrossRef] [PubMed]
- Karimi, N.; Ng, K.T.W.; Richter, A. Development and application of an analytical framework for mapping probable illegal dumping sites using nighttime light imagery and various remote sensing indices. Waste Manag. 2022, 143, 195–205. [Google Scholar] [CrossRef] [PubMed]
- Biotto, G.; Silvestri, S.; Gobbo, L.; Furlan, E.; Valenti, S.; Rosselli, R. GIS, multi-criteria and multi-factor spatial analysis for the probability assessment of the existence of illegal landfills. Int. J. Geogr. Inf. Sci. 2009, 23, 1233–1244. [Google Scholar] [CrossRef]
- Sliusar, N.; Filkin, T.; Huber-Humer, M.; Ritzkowski, M. Drone technology in municipal solid waste management and landfilling: A comprehensive review. Waste Manag. 2022, 139, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Gomes, M.J.N.; Palhano, A.W.d.C.; Reis, E.C.R. Sector arc routing-based spatial decision support system for waste collection in Brazil. Waste Manag. Res. J. A Sustain. Circ. Econ. 2023, 41, 214–221. [Google Scholar] [CrossRef]
- Marrocco, C.; Bria, A.; Tortorella, F.; Parrilli, S.; Cicala, L.; Focareta, M.; Meoli, G.; Molinara, M. Illegal Microdumps Detection in Multi-Mission Satellite Images with Deep Neural Network and Transfer Learning Approach. IEEE Access 2024, 12, 79585–79601. [Google Scholar] [CrossRef]
- Mei, A.; Baiocchi, V.; Mattei, S.; Zampetti, E.; Pai, H.-J.; Tratzi, P.; Ragazzo, A.V.; Cuzzucoli, A.; Mancuso, A.; Bearzotti, A.; et al. Conceptualization of a satellite, UAS and UGV downscaling approach for abandoned waste detection and waste to energy prospects. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, 287–293. [Google Scholar] [CrossRef]
- Amitrano, D.; Cicala, L.; Poderico, M.; Tufano, F. On the field geometrical characterization of illegal micro-dumps by means of RPAS survey with depth camera. In Proceedings of the SPIE—The International Society for Optical Engineering, Berlin, Germany, 5–8 September 2022. [Google Scholar]
- Cicala, L.; Gargiulo, F.; Parrilli, S.; Amitrano, D.; Pigliasco, G. Progressive monitoring of micro-dumps: A case study over the Campania Region (Italy). In Earth Resources and Environmental Remote Sensing/GIS Applications XIV; Schulz, K., Nikolakopoulos, K.G., Michel, U., Eds.; SPIE: Bellingham, DC, USA, 2023; p. 5. [Google Scholar] [CrossRef]
- Nebula, F.; Gargiulo, F.; Gigante, G.; Pascarella, D.; Cicala, L. Multiple-tour constrained optimization for waste sites inspections. In Proceedings of the International Conference on Optimization and Learning (OLA), Sicilia, Italy, 18–20 July 2021. [Google Scholar]
- Marfe, G.; Di Stefano, C. The evidence of toxic wastes dumping in Campania, Italy. Crit. Rev. Oncol. 2016, 105, 84–91. [Google Scholar] [CrossRef] [PubMed]
- D’Alisa, G.; Burgalassi, D.; Healy, H.; Walter, M. Conflict in Campania: Waste emergency or crisis of democracy. Ecol. Econ. 2010, 70, 239–249. [Google Scholar] [CrossRef]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 2818–2826. [Google Scholar] [CrossRef]
- Lin, T.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 2999–3007. [Google Scholar] [CrossRef]
- Butt, S.E.; Cavalier, T.M. A heuristic for the multiple tour maximum collection problem. Comput. Oper. Res. 1994, 21, 101–111. [Google Scholar] [CrossRef]
- Rego, C.; Gamboa, D.; Glover, F.; Osterman, C. Traveling salesman problem heuristics: Leading methods, implementations and latest advances. Eur. J. Oper. Res. 2011, 211, 427–441. [Google Scholar] [CrossRef]
- Häggström, O. Finite Markov Chains and Algorithmic Applications; Cambridge University Press (CUP): Cambridge, UK, 2002. [Google Scholar] [CrossRef]
- European Topic Centre on Waste and Materials in a Green Economy. Digital Waste Management. 2020. Available online: http://europa.eu (accessed on 1 October 2020).
- Mandl, P. Estimation and control in Markov chains. Adv. Appl. Probab. 1974, 6, 40–60. [Google Scholar] [CrossRef]
- Lega, M.; Ferrara, C.; Persechino, G.; Bishop, P. Remote sensing in environmental police investigations: Aerial platforms and an innovative application of thermography to detect several illegal activities. Environ. Monit. Assess. 2014, 186, 8291–8301. [Google Scholar] [CrossRef] [PubMed]
- Buntaine, M.T.; Hunnicutt, P.; Komakech, P. The Challenges of Using Citizen Reporting to Improve Public Services: A Field Experiment on Solid Waste Services in Uganda. J. Public. Adm. Res. Theory 2021, 31, 108–127. [Google Scholar] [CrossRef]
- Liu, S.M.; Yuan, Q. The Evolution of Information and Communication Technology in Public Administration. Public Adm. Dev. 2015, 35, 140–151. [Google Scholar] [CrossRef]
- Kumar, S.; Smith, S.R.; Fowler, G.; Velis, C.; Kumar, S.J.; Arya, S.; Rena; Kumar, R.; Cheeseman, C. Challenges and opportunities associated with waste management in India. R. Soc. Open Sci. 2017, 4, 160764. [Google Scholar] [CrossRef] [PubMed]
- Glanville, K.; Chang, H.-C. Remote sensing analysis techniques and sensor requirements to support the mapping of illegal domestic waste disposal sites in Queensland, Australia. Remote. Sens. 2015, 7, 13053–13069. [Google Scholar] [CrossRef]
- Youme, O.; Bayet, T.; Dembele, J.M.; Cambier, C. Deep Learning and Remote Sensing: Detection of Dumping Waste Using UAV. Procedia Comput. Sci. 2021, 185, 361–369. [Google Scholar] [CrossRef]
- Dos Santos, J.A.; Gosselin, P.-H.; Philipp-Foliguet, S.; Torres, R.d.S.; Falao, A.X. Multiscale Classification of Remote Sensing Images. IEEE Trans. Geosci. Remote. Sens. 2012, 50, 3764–3775. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).