
Integrated Control Design for Hybrid Grid-Photovoltaic Systems in Distillation Applications: A Reference Model and Fuzzy Logic Approach

 , ,
, ,  , ,
, ,  , and
, and
Abstract
1. Introduction
- ➢
- ➢
- Compared with other methods [31], the proposed control strategy for QBC, which is based on fuzzy logic, offers the benefit of maintaining the nonlinearity of the system without the need for an exact mathematical representation.
- ➢
- Unlike most existing works [13,14,17], which assume that the value of the load is perfectly known, this study develops a new adaptive controller based on the reference MRAC that can manage the hybrid energy system and achieve the control objectives despite the uncertainty that exists in the value of the load, which is assumed to be unknown. Moreover, the control strategy proposed in this study presents robustness by considering the variable behavior of the load, which leads to better control performance.
- ➢
- To test the reliability and performance of the hybrid system designed for power distillation systems, the authors validated the proposed control in MATLAB/Simulink by considering variations in load, solar irradiation, grid voltage, and load terminal voltage.
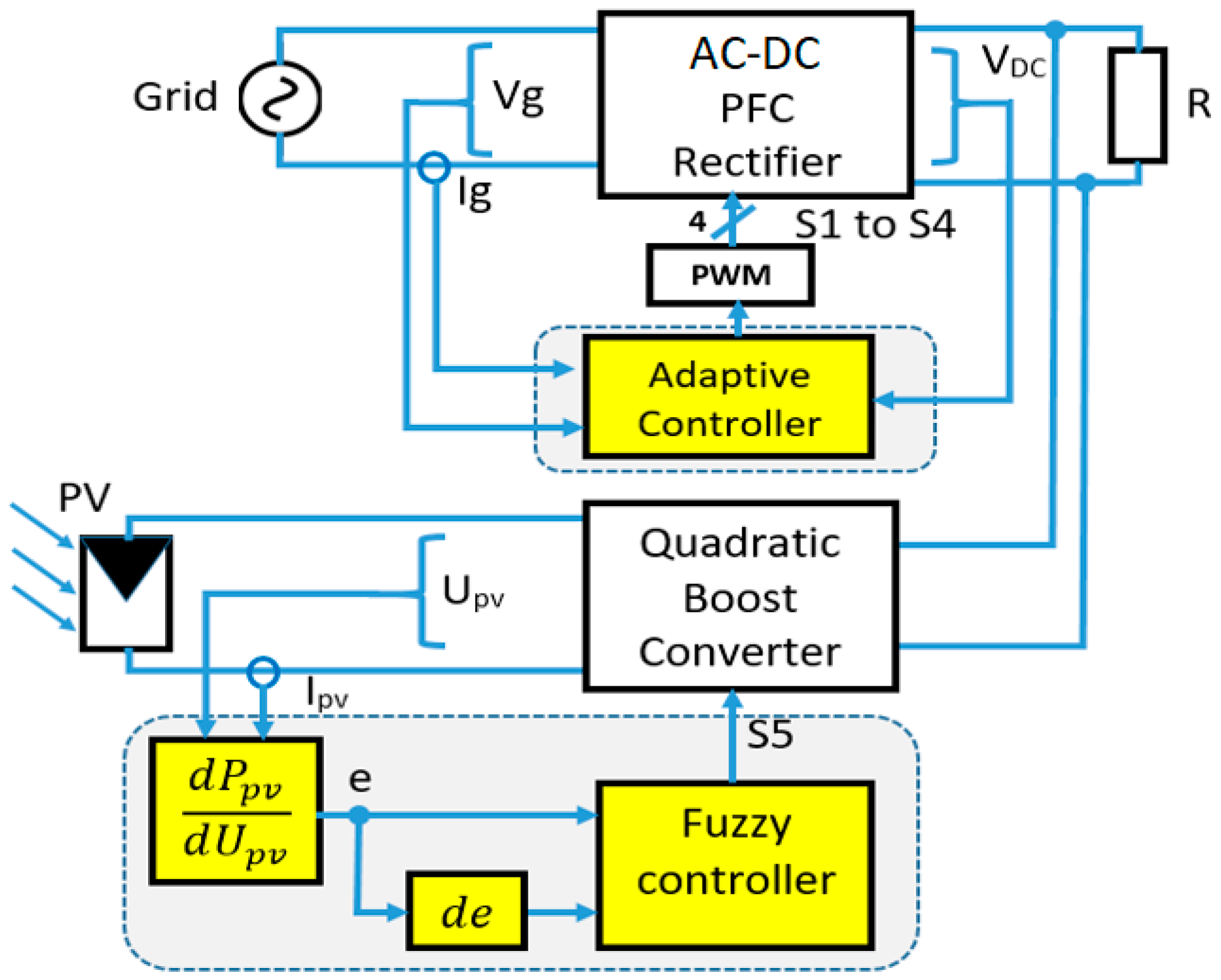
2. System Design and Justification
3. System Configuration and Design
- (a)
- achieve a unity power factor (PF), grid current in phase with voltage ;
- (b)
- regulate the output voltage of the heating resistor ;
- (c)
- improve the THD and minimize the harmonics in the grid current ;
- (d)
- extract the maximum power from the PV source .
3.1. Single-Phase Rectifier Modelling and Control
- ✓
- AC/DC rectifier modelling
- (a)
- The switch S1…S5 are assumed to be ideal, and the AC–DC and DC–DC converters have a unit efficiency ;
- (b)
- The Joule losses of the inductance L1 are presented by the resistance r;
- (c)
- The parameters R, r, L1, and C1 are assumed to be unknown;
- (d)
- Grid voltage may be measured, and the rectifier output voltage is thought to vary gradually ;
- (e)
- The internal grid current loop is faster than the external output voltage loop.
3.2. Selection of PV Array Voltage
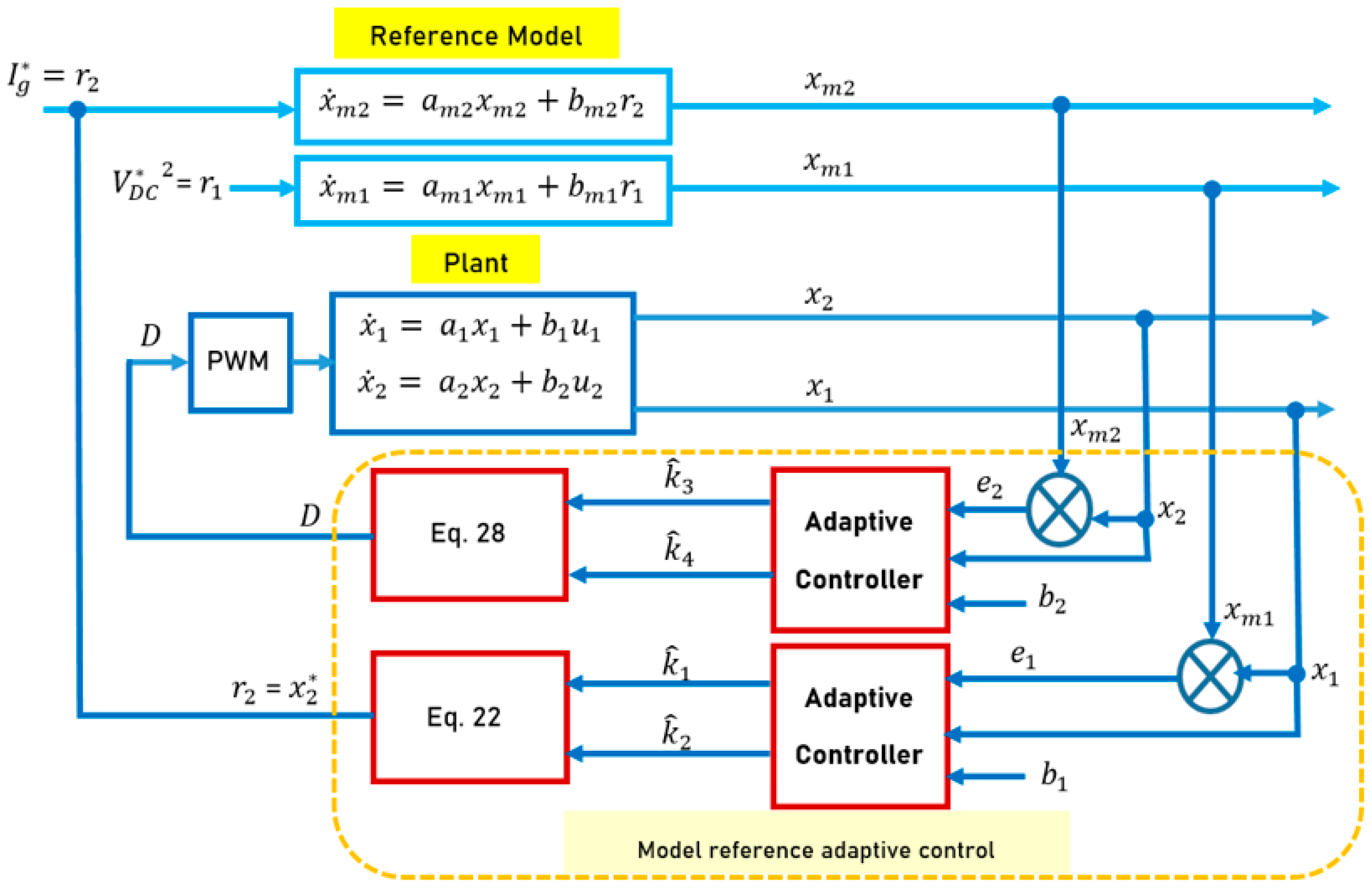
3.3. Model Reference Adaptive Control for Grid Current Optimization
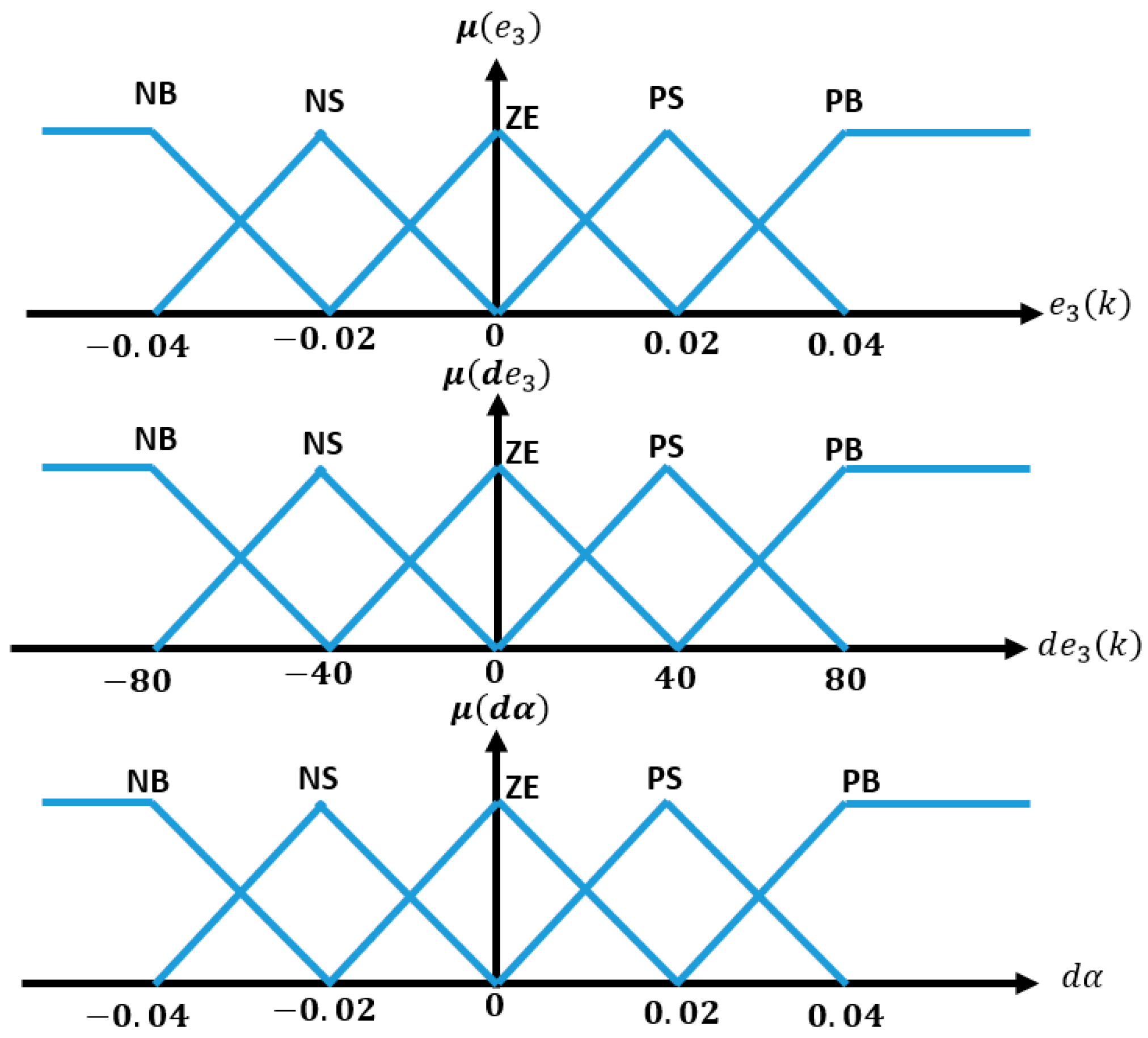
3.4. Fuzzy Logic Controller for PV Optimization
- ✓
- Fuzzification
- ✓
- Inference engine
- ✓
- Defuzzification
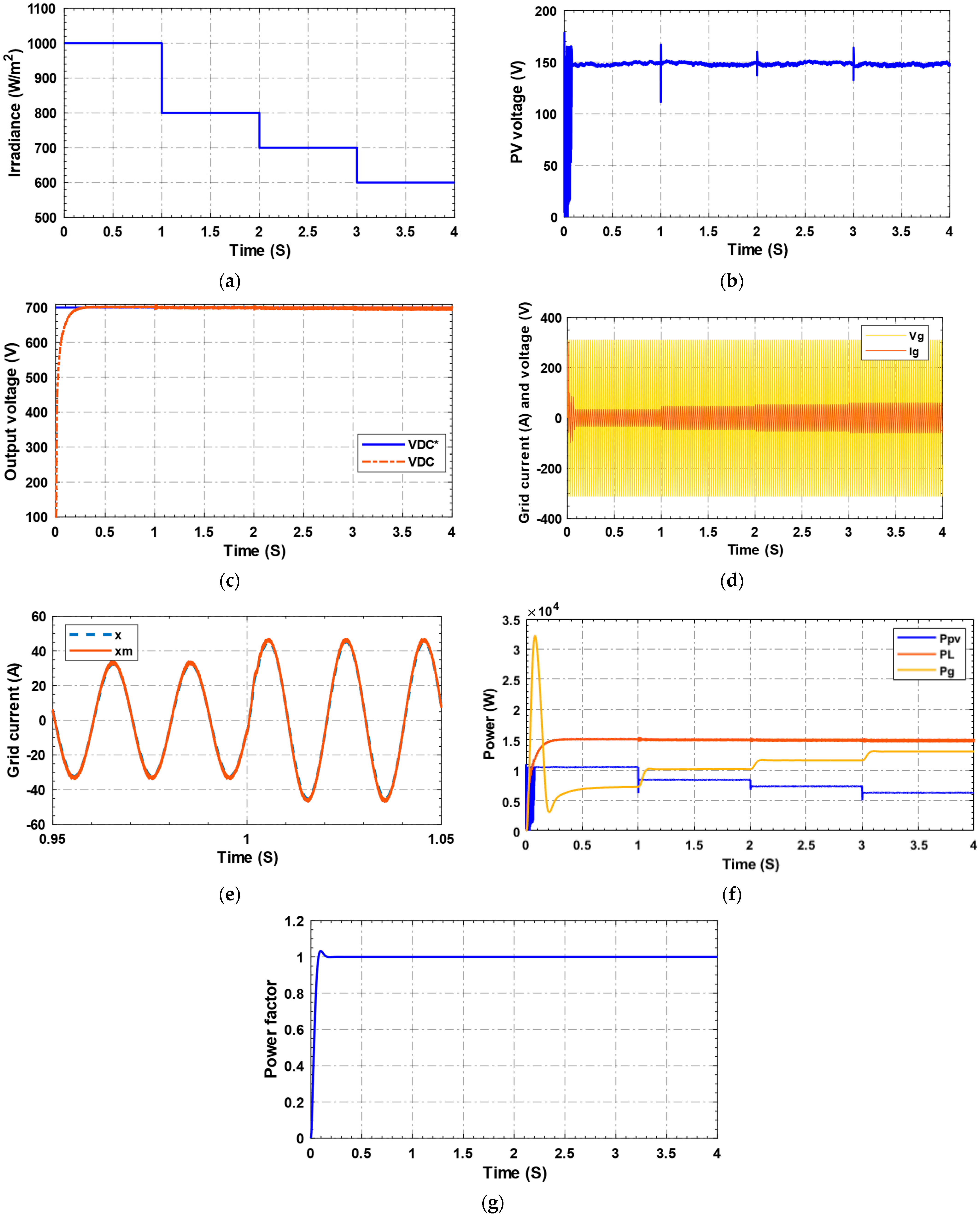
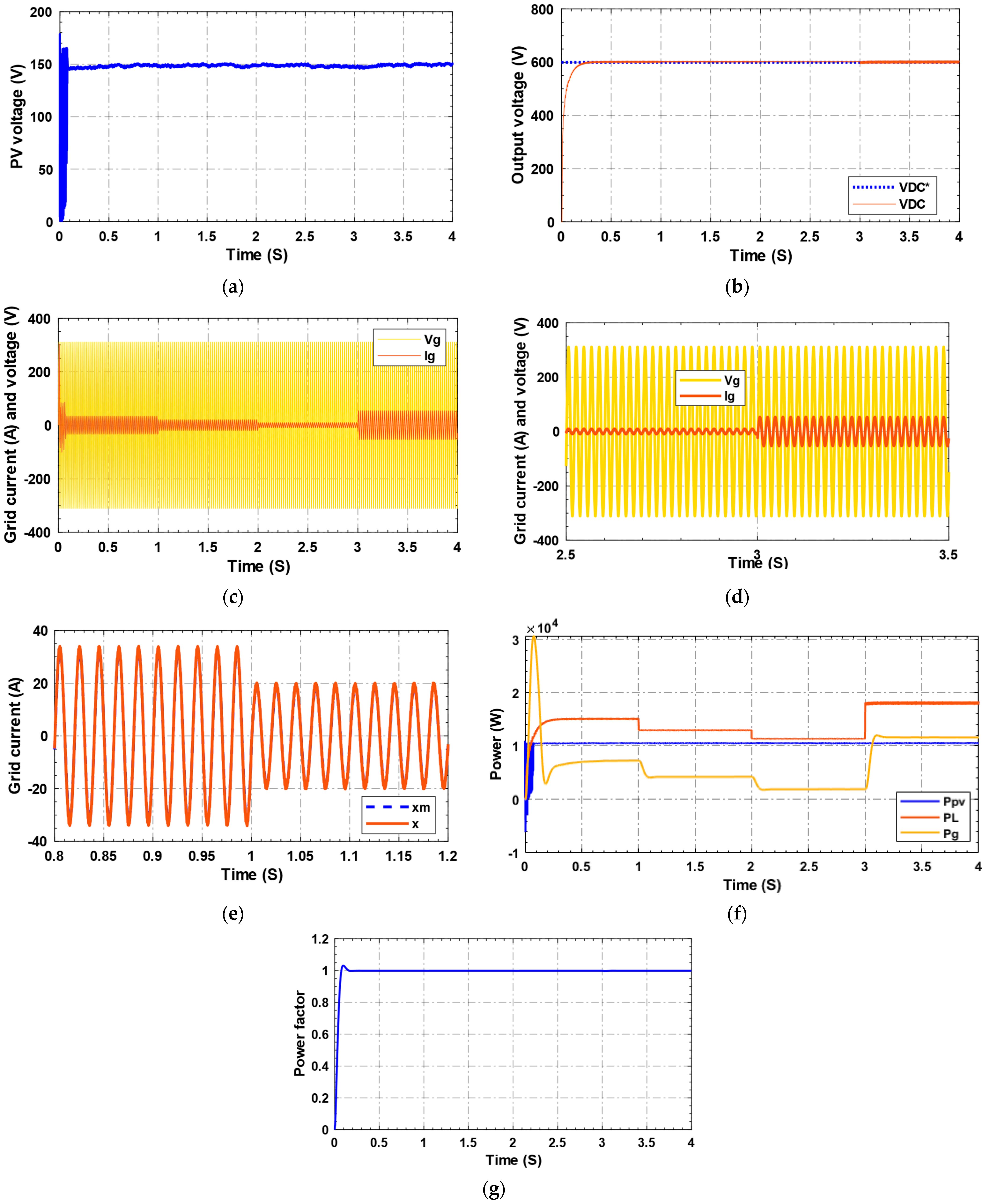
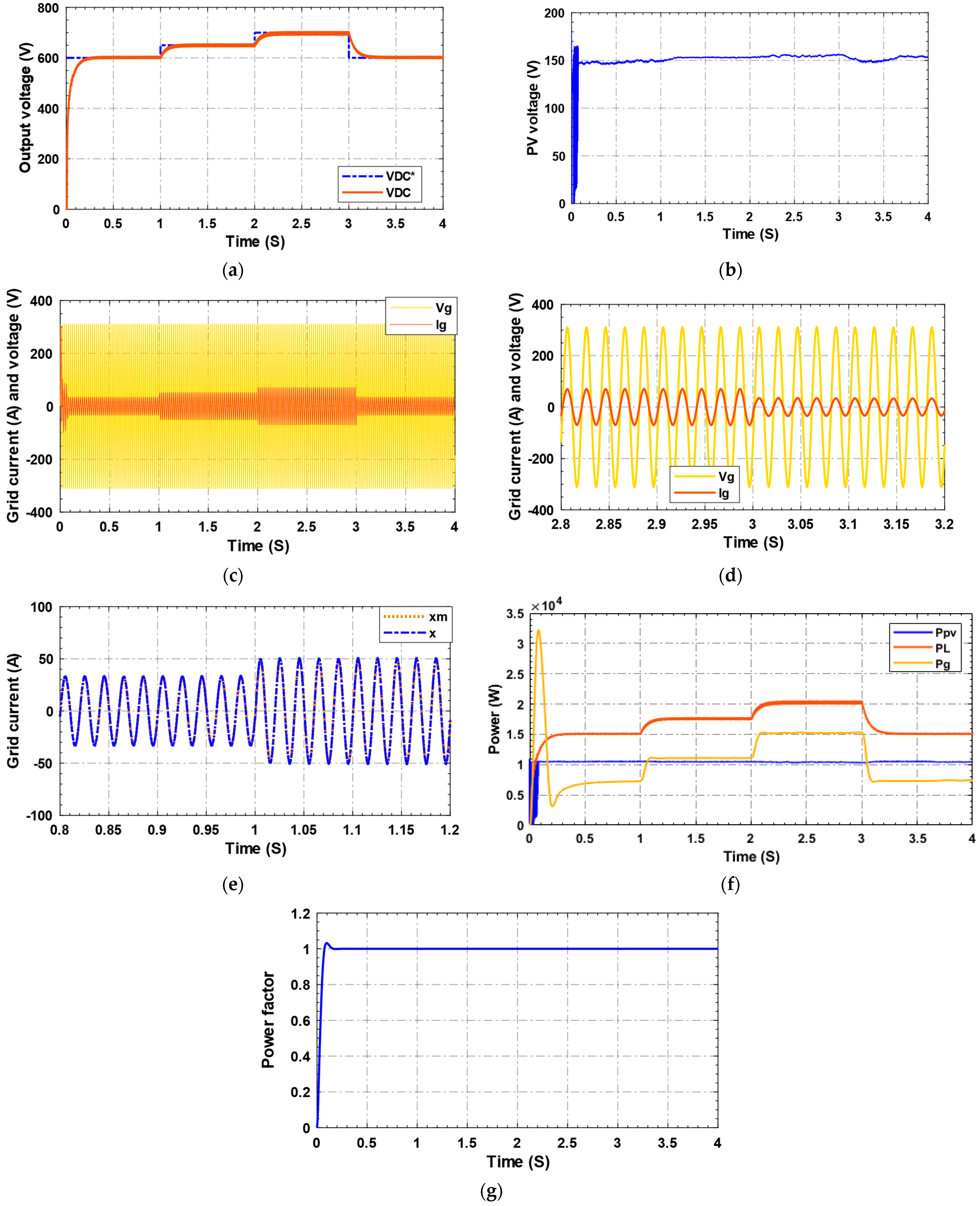
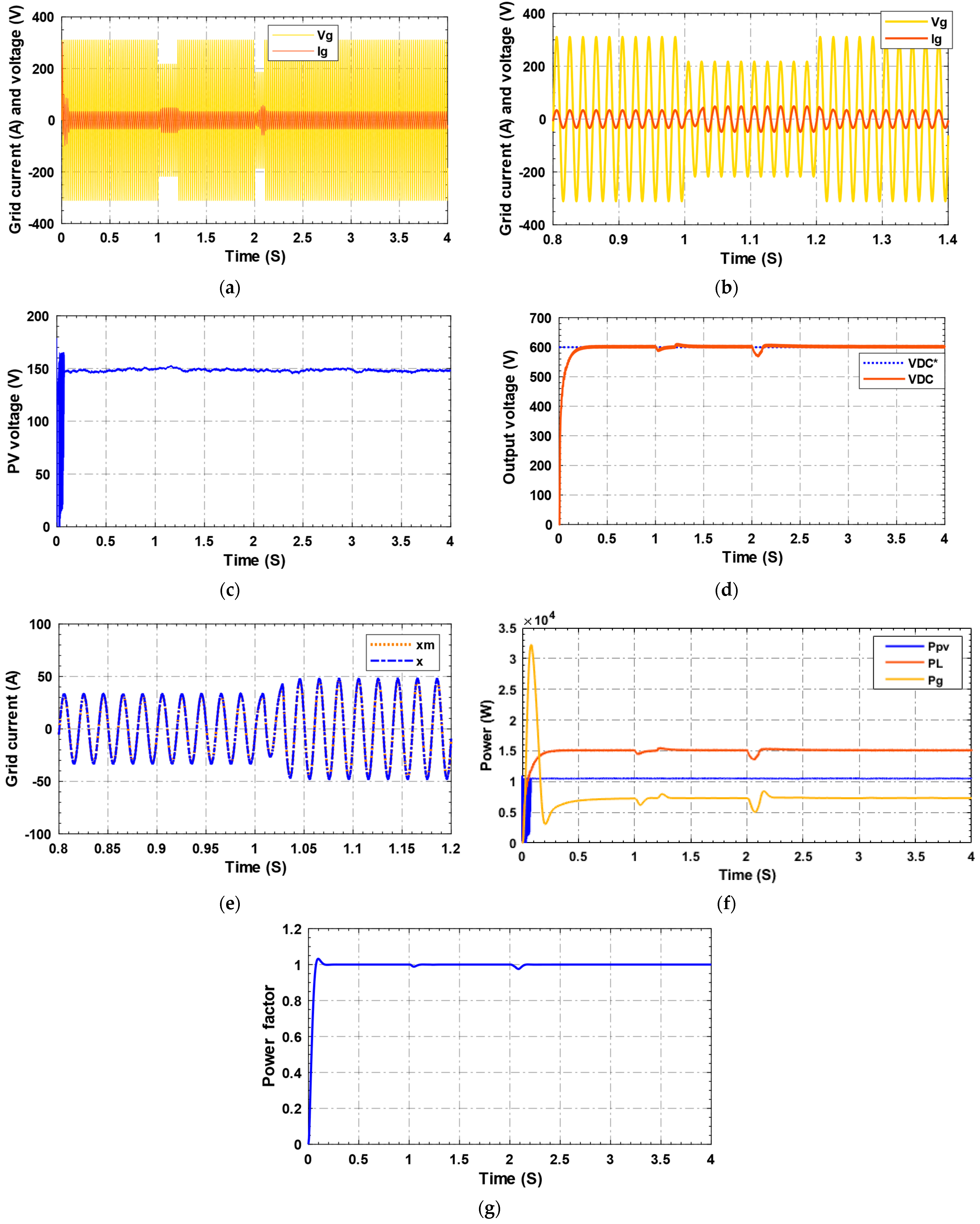
4. Simulation Results and Performance Evaluation
- ✓
- Simulation result: change in the irradiation
- ✓
- Simulation result: load change
- ✓
- Simulation result: change in the load voltage
- ✓
- Simulation result: change in the grid voltage
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Description |
| AC | Alternating current |
| DC | Direct current |
| DC output voltage | |
| Grid voltage | |
| Filtering inductance on the AC side | |
| Parasitic resistance on the AC side | |
| Capacitance on the DC side | |
| Resistive load | |
| Power switches in the single-phase bridge rectifier | |
| AC voltage input to the rectifier | |
| DC output of the rectifier | |
| Grid current | |
| PF | Power factor |
| THD | Total harmonic distortion |
| P_PV | Power from the PV source |
| D | Control input variable for the rectifier |
| Power delivered to the load | |
| Voltage of the PV array | |
| The current of the PV array | |
| FLC | Fuzzy logic controller |
| MPPT | Maximum power point tracking |
| QBC | Quasi-Z-source boost converter |
| Maximum power voltage of the PV array | |
| Controller parameters for the MRAC | |
| Coefficients in the rectifier model equations | |
| Coefficients in the rectifier model equations | |
| State variables in the MRAC model | |
| State variables in the reference model | |
| Estimates of the controller parameters | |
| Parameter estimation errors | |
| Lyapunov function for MRAC | |
| Reference model inputs | |
| Power from the PV source | |
| Reference power delivered to the load | |
| Grid current pulsation | |
| Grid frequency | |
| Pulse width modulation frequency | |
| Error for the FLC MPPT | |
| Derivative of the error for the FLC MPPT | |
| Derivative of the duty cycle for the FLC |
References
- Aly, S.; Manzoor, H.; Simson, S.; Abotaleb, A.; Lawler, J.; Mabrouk, A.N. Pilot testing of a novel Multi Effect Distillation (MED) technology for seawater desalination. Desalination 2021, 519, 115221. [Google Scholar] [CrossRef]
- Chafidz, A.; Kerme, E.D.; Wazeer, I.; Khalid, Y.; Ajbar, A.; Al-Zahrani, S.M. Design and fabrication of a portable and hybrid solar-powered membrane distillation system. J. Clean. Prod. 2016, 133, 631–647. [Google Scholar] [CrossRef]
- Wei, M.; Xiang, J.; Ye, H.; Zheng, H.; Wang, K.; Chen, J. Using water-filling and air-releasing to design a natural vacuum solar desalination system. Sol. Energy 2021, 220, 598–607. [Google Scholar] [CrossRef]
- Rabie, M.; Ali, A.Y.; Abo-Zahhad, E.M.; Elqady, H.I.; Elkady, M.; Ookawara, S.; El-Shazly, A.; Salem, M.S.; Radwan, A. Thermal analysis of a hybrid high concentrator photovoltaic/membrane distillation system for isolated coastal regions. Sol. Energy 2021, 215, 220–239. [Google Scholar] [CrossRef]
- Abouelmahjoub, Y.; El Beid, S.; Abouobaida, H.; Chellakhi, A. Nonlinear Observation and Control of Series Active Power Filters in the Presence of Voltage Sags. Int. J. Photoenergy 2022, 2022, e7761031. [Google Scholar] [CrossRef]
- Mchaouar, Y.; Abouloifa, A.; Lachkar, I.; Katir, H.; Giri, F.; El Aroudi, A.; Taghzaoui, C. Singular perturbation theory for PWM AC/DC converters: Nonlinear cascade control design and stability analysis. Iran. J. Electr. Electron. Eng. 2022, 18, 2013. [Google Scholar] [CrossRef]
- Giri, F.; Abouloifa, A.; Lachkar, I.; Chaoui, F.Z. Formal Framework for Nonlinear Control of PWM AC/DC Boost Rectifiers—Controller Design and Average Performance Analysis. IEEE Trans. Control Syst. Technol. 2010, 18, 323–335. [Google Scholar] [CrossRef]
- Eren, S.; Pahlevani, M.; Bakhshai, A.; Jain, P. A Digital Current Control Technique for Grid-Connected AC/DC Converters Used for Energy Storage Systems. IEEE Trans. Power Electron. 2017, 32, 3970–3988. [Google Scholar] [CrossRef]
- Chen, H.-C.; Liao, J.-Y. Bidirectional Current Sensorless Control for the Full-Bridge AC/DC Converter With Considering Both Inductor Resistance and Conduction Voltages. IEEE Trans. Power Electron. 2014, 29, 2071–2082. [Google Scholar] [CrossRef]
- Sabzehgar, R.; Roshan, Y.M.; Fajri, P. Modelling and sliding-mode control of a single-phase single-stage converter with application to plug-in electric vehicles. IET Power Electron. 2019, 12, 620–626. [Google Scholar] [CrossRef]
- Chen, T.-C.; Ren, T.-J.; Ou, J.-C. Fixed switching frequency applied in single-phase boost AC to DC converter. Energy Convers. Manag. 2009, 50, 2659–2664. [Google Scholar] [CrossRef]
- Hossain, M.; Rahim, N.; Selvaraj, J.A. Recent progress and development on power DC-DC converter topology, control, design and applications: A review. Renew. Sustain. Energy Rev. 2018, 81, 205–230. [Google Scholar] [CrossRef]
- Martinez-Lopez, M.; Moreno-Valenzuela, J.; He, W. A robust nonlinear PI-type controller for the DC–DC buck–boost power converter. ISA Trans. 2022, 129, 687–700. [Google Scholar] [CrossRef]
- Anzehaee, M.M.; Hajihosseini, P.; Behnam, B. Presenting an effective and easy method for designing and tuning predictive controller for boost and buck-boost converters in Continuous Conduction Mode. Control Eng. Pract. 2021, 114, 104882. [Google Scholar] [CrossRef]
- Cordeiro, A.; Pires, V.F.; Foito, D.; Pires, A.; Martins, J. Three-level quadratic boost DC-DC converter associated to a SRM drive for water pumping photovoltaic powered systems. Sol. Energy 2020, 209, 42–56. [Google Scholar] [CrossRef]
- Pires, V.F.; Cordeiro, A.; Foito, D.; Silva, J.F. Control transition mode from voltage control to MPPT for PV generators in isolated DC microgrids. Int. J. Electr. Power Energy Syst. 2022, 137, 107876. [Google Scholar] [CrossRef]
- Ozdemir, S.; Altin, N.; Sefa, I. Fuzzy logic based MPPT controller for high conversion ratio quadratic boost converter. Int. J. Hydrogen Energy 2017, 42, 17748–17759. [Google Scholar] [CrossRef]
- Naik, B.; Mehta, A. Sliding mode controller with modified sliding function for DC-DC Buck Converter. ISA Trans. 2017, 70, 279–287. [Google Scholar] [CrossRef]
- Nandankar, P.V.; Bedekar, P.P.; Dhawas, P.V. Efficient DC-DC converter with optimized switching control: A comprehensive review. Sustain. Energy Technol. Assess. 2021, 48, 101670. [Google Scholar] [CrossRef]
- Karami, N.; Moubayed, N.; Outbib, R. General review and classification of different MPPT Techniques. Renew. Sustain. Energy Rev. 2017, 68, 1–18. [Google Scholar] [CrossRef]
- Mao, M.; Cui, L.; Zhang, Q.; Guo, K.; Zhou, L.; Huang, H. Classification and summarization of solar photovoltaic MPPT techniques: A review based on traditional and intelligent control strategies. Energy Rep. 2020, 6, 1312–1327. [Google Scholar] [CrossRef]
- Motahhir, S.; El Hammoumi, A.; El Ghzizal, A. The most used MPPT algorithms: Review and the suitable low-cost embedded board for each algorithm. J. Clean. Prod. 2020, 246, 118983. [Google Scholar] [CrossRef]
- Sousa, S.; Gusman, L.; Lopes, T.; Pereira, H.; Callegari, J. MPPT algorithm in single loop current-mode control applied to dc–dc converters with input current source characteristics. Int. J. Electr. Power Energy Syst. 2022, 138, 107909. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.; Zhu, D.; An, N.; Sang, Y.; Jiang, L. Perturbation observer based fractional-order sliding-mode controller for MPPT of grid-connected PV inverters: Design and real-time implementation. Control Eng. Pract. 2018, 79, 105–125. [Google Scholar] [CrossRef]
- Hou, G.; Ke, Y.; Huang, C. A flexible constant power generation scheme for photovoltaic system by error-based active disturbance rejection control and perturb & observe. Energy 2021, 237, 121646. [Google Scholar] [CrossRef]
- Jately, V.; Azzopardi, B.; Joshi, J.; Venkateswaran, V.B.; Sharma, A.; Arora, S. Experimental Analysis of hill-climbing MPPT algorithms under low irradiance levels. Renew. Sustain. Energy Rev. 2021, 150, 111467. [Google Scholar] [CrossRef]
- Shahid, H.; Kamran, M.; Mehmood, Z.; Saleem, M.Y.; Mudassar, M.; Haider, K. Implementation of the novel temperature controller and incremental conductance MPPT algorithm for indoor photovoltaic system. Sol. Energy 2018, 163, 235–242. [Google Scholar] [CrossRef]
- Fathi, M.; Parian, J.A. Intelligent MPPT for photovoltaic panels using a novel fuzzy logic and artificial neural networks based on evolutionary algorithms. Energy Rep. 2021, 7, 1338–1348. [Google Scholar] [CrossRef]
- Miladi, R.; Frikha, N.; Gabsi, S. Modeling and energy analysis of a solar thermal vacuum membrane distillation coupled with a liquid ring vacuum pump. Renew. Energy 2021, 164, 1395–1407. [Google Scholar] [CrossRef]
- Gil, J.D.; Roca, L.; Zaragoza, G.; Berenguel, M. A feedback control system with reference governor for a solar membrane distillation pilot facility. Renew. Energy 2018, 120, 536–549. [Google Scholar] [CrossRef]
- Sferlazza, A.; Albea-Sanchez, C.; Garcia, G. A hybrid control strategy for quadratic boost converters with inductor currents estimation. Control Eng. Pract. 2020, 103, 104602. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 0 | 0 | 0 | 0 |
| 2 | 0 | 1 | − | − |
| 3 | 1 | 0 | ||
| 4 | 1 | 1 | 0 | 0 |
| NB | NS | ZE | PS | PB | |
| NB | ZE | ZE | NB | NB | NB |
| NS | ZE | ZE | NS | NS | NS |
| ZE | NS | ZE | ZE | ZE | PS |
| PS | PS | PS | PS | ZE | ZE |
| PB | PB | PB | PB | ZE | ZE |
| AC–DC Rectifier | QBC | ||
|---|---|---|---|
| L1 | 5 mH | Ppv (max) | 10.5 kW |
| r | 0.1 Ω | Upv (max) | 150 V |
| L2 | 4 mH | ||
| − f(PWM) | 50–10 kHz | L3 | 4 mH |
| R (load) | 24 Ω | C2 | 1500 µF |
| C1 | 5000 µF | C3 | 100 µF |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abouobaida, H.; Mchaouar, Y.; Ullah, S.; Abouelmahjoub, Y.; Alghamdi, H.; Alghamdi, B.; Kraiem, H. Integrated Control Design for Hybrid Grid-Photovoltaic Systems in Distillation Applications: A Reference Model and Fuzzy Logic Approach. Sustainability 2024, 16, 7304. https://doi.org/10.3390/su16177304
Abouobaida H, Mchaouar Y, Ullah S, Abouelmahjoub Y, Alghamdi H, Alghamdi B, Kraiem H. Integrated Control Design for Hybrid Grid-Photovoltaic Systems in Distillation Applications: A Reference Model and Fuzzy Logic Approach. Sustainability. 2024; 16(17):7304. https://doi.org/10.3390/su16177304
Chicago/Turabian StyleAbouobaida, Hassan, Youssef Mchaouar, Safeer Ullah, Younes Abouelmahjoub, Hisham Alghamdi, Baheej Alghamdi, and Habib Kraiem. 2024. "Integrated Control Design for Hybrid Grid-Photovoltaic Systems in Distillation Applications: A Reference Model and Fuzzy Logic Approach" Sustainability 16, no. 17: 7304. https://doi.org/10.3390/su16177304
APA StyleAbouobaida, H., Mchaouar, Y., Ullah, S., Abouelmahjoub, Y., Alghamdi, H., Alghamdi, B., & Kraiem, H. (2024). Integrated Control Design for Hybrid Grid-Photovoltaic Systems in Distillation Applications: A Reference Model and Fuzzy Logic Approach. Sustainability, 16(17), 7304. https://doi.org/10.3390/su16177304