




Detection of Methane Leaks via a Drone-Based System for Sustainable Landfills and Oil and Gas Facilities: Effect of Different Variables on the Background-Noise Measurement

Abstract
:1. Introduction
2. Materials and Methods
2.1. Surveys Design and Locations
- -
- a suburban area (SA) on the outskirts of the city: the area is characterized by the presence of buildings surrounded by concrete surfaces and green areas (Figure 1b);
- -
- an industrial area (IA): dedicated mainly to metalworking production; an area characterized by a gravel covering was chosen (Figure 1d);
- -
- an agricultural area (AA) dedicated to the production of durum wheat (Figure 1c).
- -
- The surveys were designed to test the following controllable variables:
- -
- various flight altitudes: heights of 7, 10, 15, 20 m above ground level (AGL) were generally tested; in some cases even higher heights were tested (25, 30, 40 m AGL);
- -
- various UAV speeds: speeds of 1, 2, 3, 4 ms−1 were generally tested; in some cases the flight was carried out when hovering or at the very low speed of 0.5 ms−1;
- -
- various overflight surfaces: areas covered with very short grass or tall grasses were flown over, others were made up of concrete bricks or white gravel. The former surfaces can typically be found in waste landfills while the latter in sites hosting gas infrastructure.
- -
- time of day at which to carry out the survey: different hours of the day correspond to different solar radiation present on the site which can affect the reflection of the laser light; even the presence or absence of shading at different times can have the same effect;
- -
- degree of sky coverage: the presence or absence of clouds in the sky also affects the reflected radiation that backscatters to the sensor; a survey was repeated on a day characterized by a sky completely covered by clouds;
- -
- wind intensity: the wind can cause different stresses to the drone during flight, determining a different level of oscillation which in turn affects the oscillation of the beam transmitted by the laser; even the cover on the ground can move in the presence of wind (think, for example, of tall grasses) and this can affect the return reading to the sensor.
2.2. Instrumentation
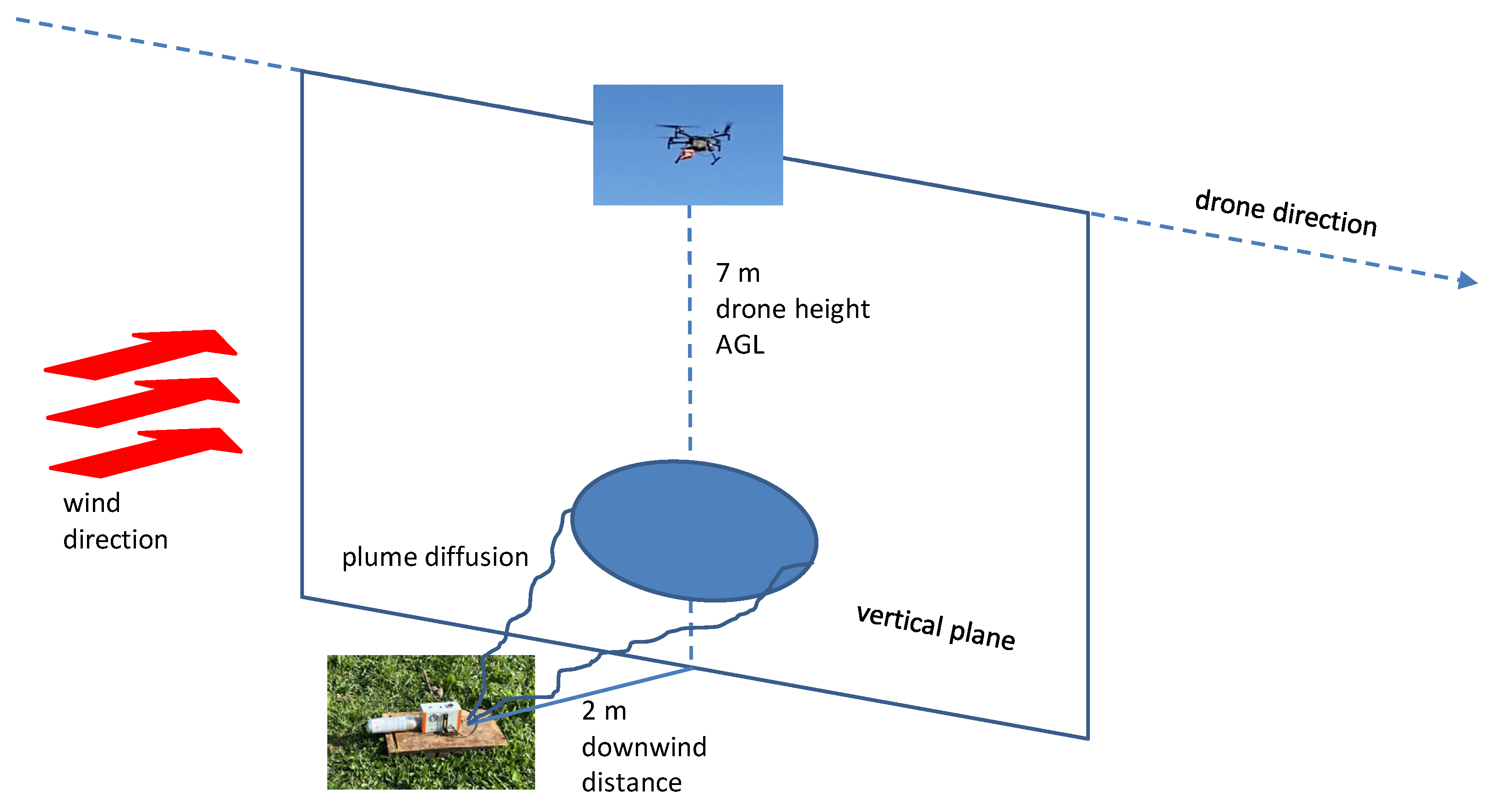
2.3. Controlled Methane Release Tests
- manometer (0–16 bar) for the display of the test gas can’s pressure;
- adjustable flowmeter (0–80 Lh−1);
- connection for all test gas cans.
- basic statistics of the data collected during drone flights as a function of the flight characteristics;
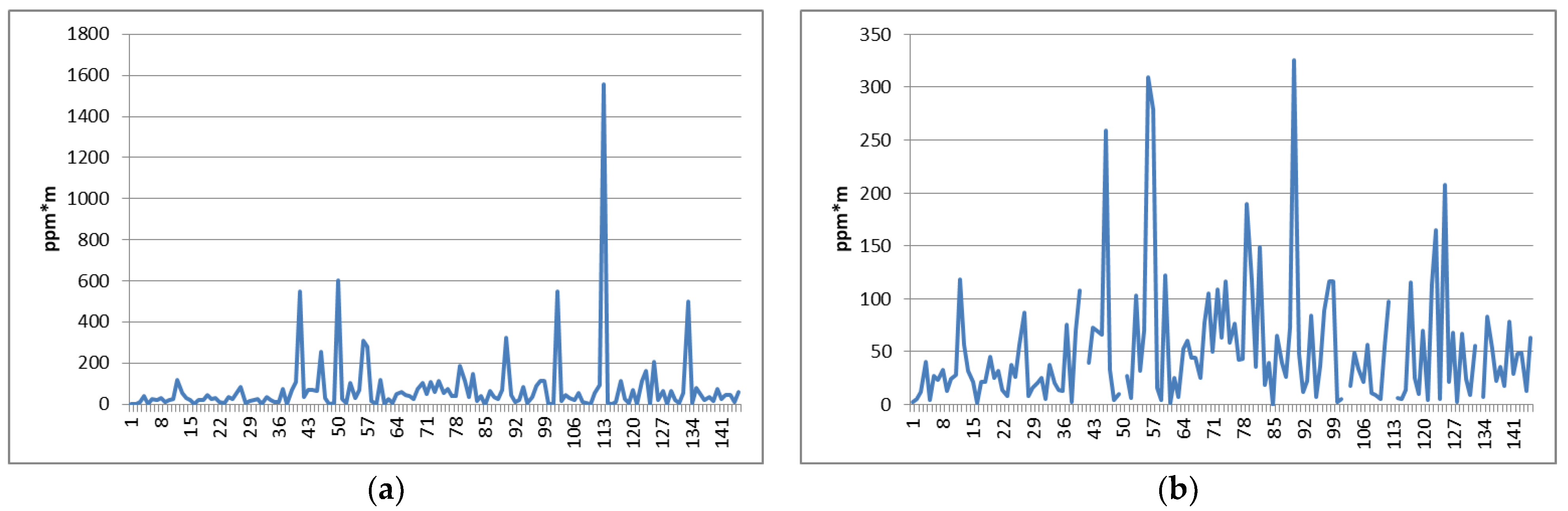
- application of specific functions or algorithms for correcting false positives;
- analysis of the differences found in the various cases.
3. Results
3.1. Results and Elaborations of a Specific Survey
3.2. Basic Statistics of the Tests Carried Out
3.3. Controlled Methane Release Tests Results
4. Discussion
- -
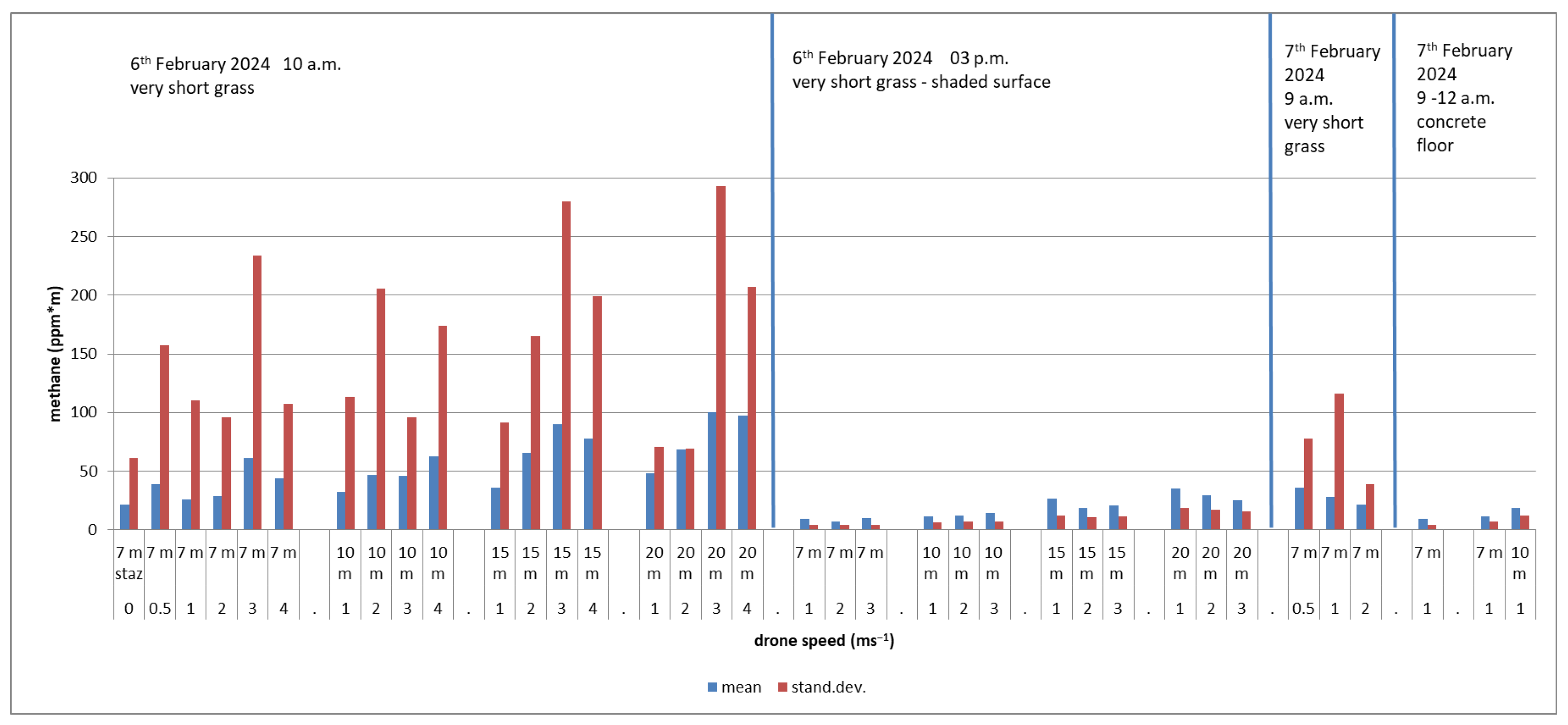
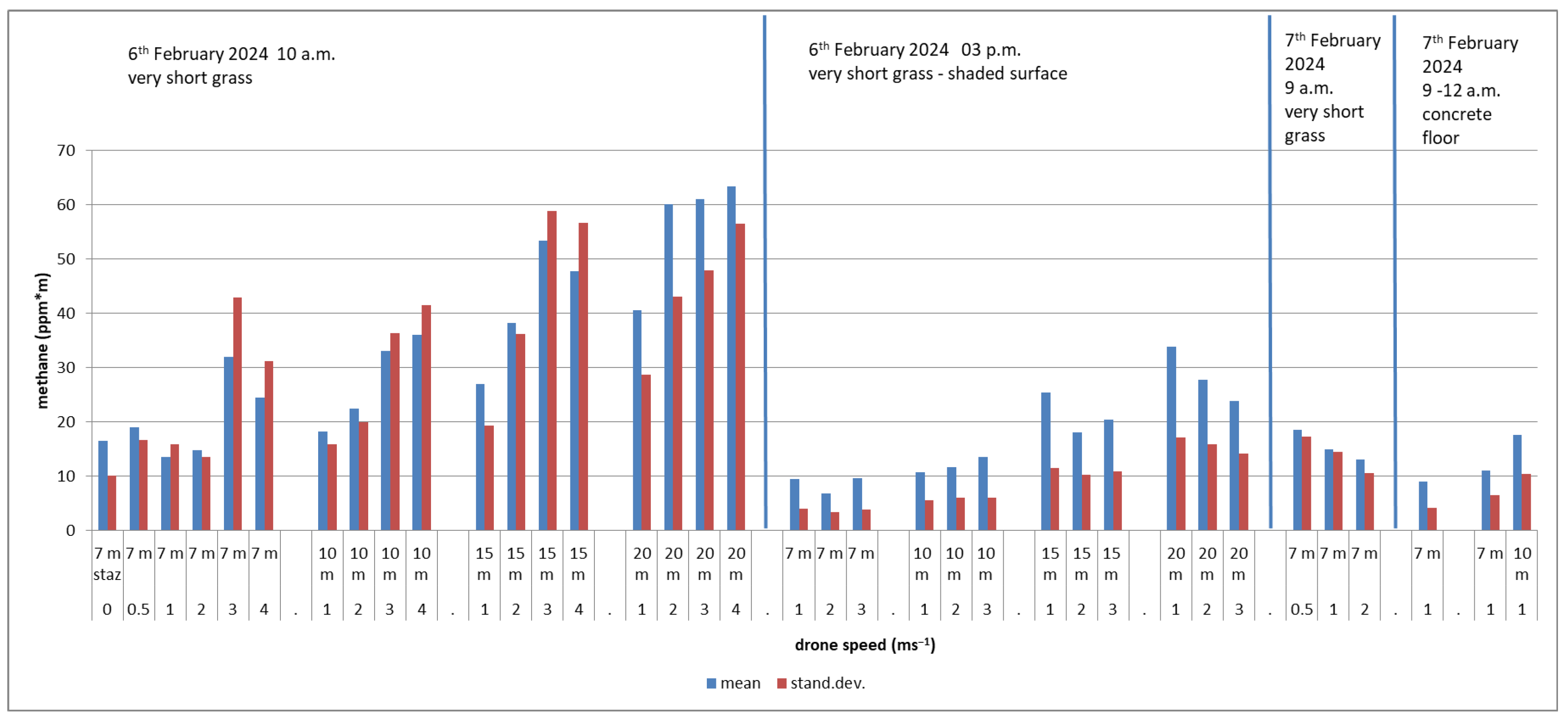
- Flight heights: flights at a height of 20 m AGL produce background values up to three times those found at a height of 7 or 10 m AGL; at higher heights the situation worsens further; it can be deduced that the best flight heights, using the TDLAS sensor, are between 7 and 10 m AGL.
- -
- UAV speed: higher speeds correspond to greater variability of the background measurements; the same result is obtained by flying very slowly (0.5 ms−1); the lowest background values are found at speeds of 1 and 2 ms−1.
- -
- Hovering flight: the values found in stationary flight are in line with those recorded at speeds of 1 and 2 ms−1 at the various heights; no advantage is observed in terms of lower background while remaining still when hovering at individual monitoring points.
- -
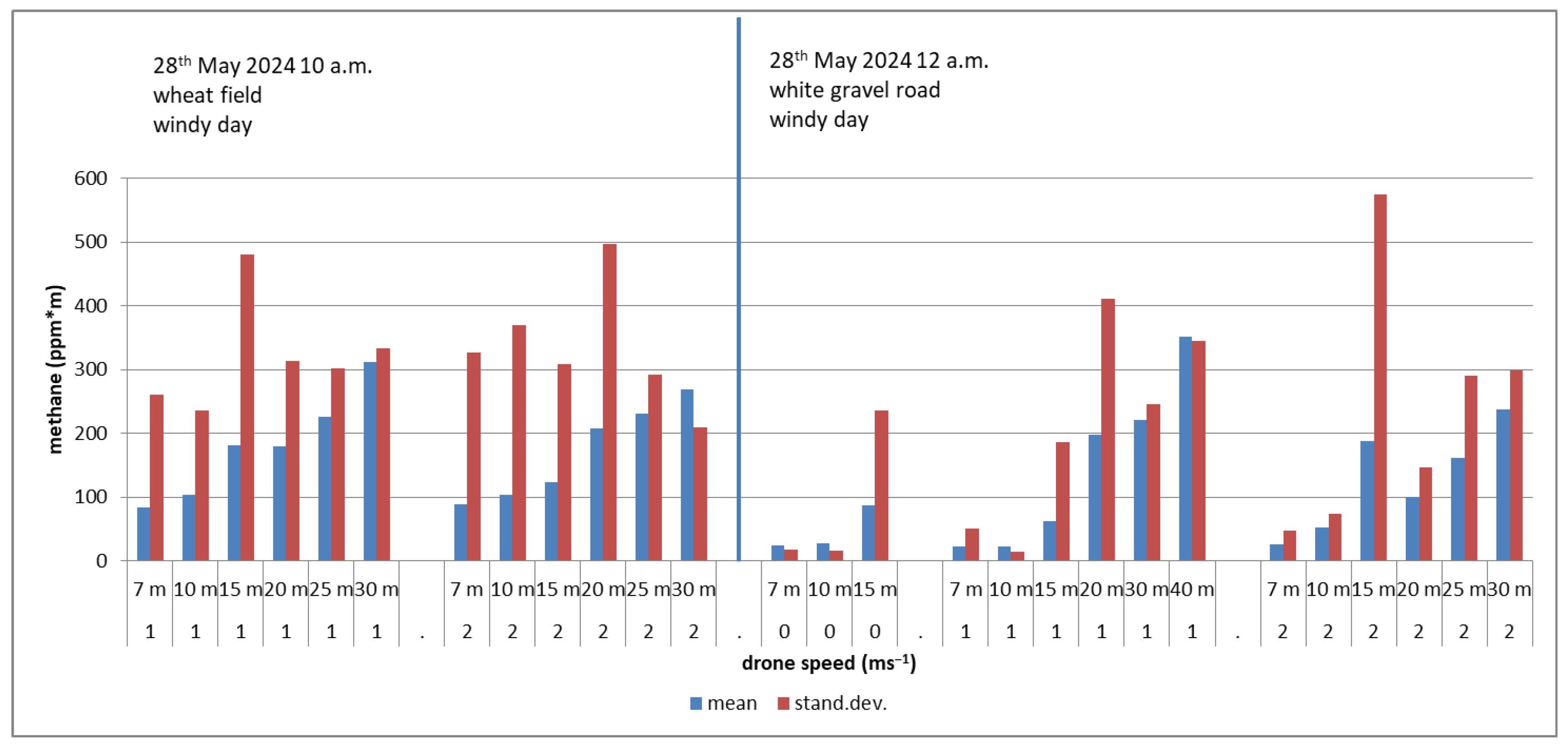
- Surfaces flown over: homogeneous surfaces such as those represented by concrete floors or gravel roads return lower background values compared to more discontinuous surfaces such as those made up of grass, all other conditions being equal. This can be seen by comparing the flights at 7 m AGL and at a speed of 1 ms−1 in Survey n. 3 and 4 in SA, where a 60% lower average concentration was recorded in flights performed over concrete floors compared to flights over short grass; also in Survey n. 5 and 6 the same phenomenon is noted with values of flights carried out on white gravel reduced within a range of 50–78% compared to flights over tall vegetation (there is also a flight with very anomalous values carried out over a white gravel road at a height of 15 m AGL, most likely due to the strong oscillations of the drone to counterbalance the strong wind gusts).
- -
- Repeated flights in the same atmospheric conditions at approximately the same time: similar background values with a variation of ±10% are shown.
- -
- Wind speed: this does not significantly influence the variation of average background concentrations for winds up to approximately 3 ms−1; with more intense winds, over 4 ms−1, even in the presence of gusts, the drone is subject to greater oscillations that need to be corrected suddenly, which very often cause false positive readings. Furthermore, if the surface flown over is covered by a layer of grass, it happens that with more intense winds the stems of the plants sway more, generating greater difficulty in interpreting the laser beam backscatter by the sensor, with consequent measurement errors.
- -
- Reflectance of surfaces in the presence of sunlight: a critical feature of the drone–TDLAS system is represented by the continuous change in the reflectance of the targeted surface from which the backscatter signal is received in a mobile system. This criticality is amplified in the presence of sunlight; this appears clear in the comparison between the results of Survey n. 2 compared to n. 1. In fact, Survey n. 2 simply constitutes a repetition of Survey n. 1 performed on the same surface at a different time; in the afternoon the surface flown over was in the shade compared to the morning, as can be seen in Figure 1b, and the average concentrations are all much lower than those recorded in the morning in the presence of direct sunlight on the surface on which the laser is fired. The same results are achieved by simply “obscuring” direct sunlight with clouds. Survey n. 7 and 8 were carried out on different days, the first one was completely sunny while on the second day the sky was entirely overcast. The effect obtained is the same as the previous case: the average methane background concentrations are all 31 to 46% lower in the presence of overcast skies, despite there also being a higher wind intensity.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- IPCC. Climate Change 2021: The Physical Science Basis. AR6. Working Group I Contribution to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2021. [Google Scholar]
- COM(2020) 663 Final; Communication from the Commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions on an EU Strategy to Reduce Methane Emissions. European Union: Brussels, Belgium, 2020.
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Madrigal, V.P.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. Review. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Jońca, J.; Pawnuk, M.; Bezyk, Y.; Arsen, A.; Sówka, I. Drone-assisted monitoring of atmospheric pollution—A comprehensive review. Sustainability 2022, 14, 11516. [Google Scholar] [CrossRef]
- Li, Y.; Li, W.; Jin, Z.; Luo, X.; Xie, G.; Tai, H.; Jiang, Y.; Yang, Y.; Su, Y. Ternary ordered assembled piezoelectric composite for self-powered ammonia detection. Nano Energy 2024, 122, 109291. [Google Scholar] [CrossRef]
- Chen, C.; Xie, G.; Dai, J.; Li, W.; Cai, Y.; Li, J.; Zhang, Q.; Tai, H.; Jiang, Y.; Su, Y. Integrated core-shell structured smart textiles for active NO2 concentration and pressure monitoring. Nano Energy 2023, 116, 108788. [Google Scholar] [CrossRef]
- Su, Y.; Chen, S.; Liu, B.; Lu, H.; Luo, X.; Chen, C.; Li, W.; Long, Y.; Tai, H.; Xie, G.; et al. Maxwell displacement current induced wireless self-powered gas sensor array. Mater. Today Phys. 2023, 30, 100951. [Google Scholar] [CrossRef]
- Dai, J.; Xie, G.; Chen, C.; Liu, Y.; Tai, H.; Jiang, Y.; Su, Y. Hierarchical piezoelectric composite film for self-powered moisture detection and wearable biomonitoring. Appl. Phys. Lett. 2024, 124, 053701. [Google Scholar] [CrossRef]
- Zhang, Q.; Xie, G.; Duan, M.; Liu, Y.; Cai, Y.; Xu, M.; Zhao, K.; Tai, H.; Jiang, Y.; Su, Y. Zinc Oxide Nanorods for Light-Activated Gas Sensing and Photocatalytic Applications. ACS Appl. Nano Mater. 2023, 6, 17445–17456. [Google Scholar] [CrossRef]
- Sliusar, N.; Filkin, T.; Huber-Humer, M.; Ritzkowski, M. Drone technology in municipal solid waste management and landfilling: A comprehensive review. Waste Manag. 2022, 139, 1–16. [Google Scholar] [CrossRef]
- Soskind, M.G.; Li, N.P.; Moore, D.P.; Chen, Y.; Wendt, L.P.; McSpiritt, J.; Zondlo, M.A.; Wysocki, G. Stationary and drone-assisted methane plume localization with dispersion spectroscopy. Remote Sens. Environ. 2023, 289, 113513. [Google Scholar] [CrossRef]
- Daugela, I.; Visockiene, J.S.; Kumpiene, J. Detection and analysis of methane emissions from a landfill using unmanned aerial drone systems and semiconductor sensors. Detritus 2020, 10, 127–138. [Google Scholar] [CrossRef]
- Fjelsted, L.; Christensen, A.G.; Larsen, J.E.; Kjeldsen, P.; Scheutz, C. Assessment of a landfill methane emission screening method using an unmanned aerial vehicle mounted thermal infrared camera—A field study. Waste Manag. 2019, 87, 893–904. [Google Scholar] [CrossRef] [PubMed]
- Emran, B.J.; Tannant, D.D.; Najjaran, H. Low-Altitude Aerial Methane Concentration Mapping. Remote Sens. 2017, 9, 823. [Google Scholar] [CrossRef]
- Elpelt-Wessel, I.; Reiser, M.; Morrison, D.; Kranert, M. Emission Determination by Three Remote Sensing Methods in Two Release Trials. Atmosphere 2022, 13, 53. [Google Scholar] [CrossRef]
- Olaguer, E.P.; Jeltema, S.; Gauthier, T.; Jermalowicz, D.; Ostaszewski, A.; Batterman, S.; Xia, T.; Raneses, J.; Kovalchick, M.; Miller, S.; et al. Landfill Emissions of Methane Inferred from Unmanned Aerial Vehicle and Mobile Ground Measurements. Atmosphere 2022, 13, 983. [Google Scholar] [CrossRef]
- Allen, G.; Hollingsworth, P.; Kabbabe, K.; Pitt, J.R.; Mead, M.I.; Illingworth, S.; Roberts, G.; Bourn, M.; Shallcross, D.E.; Percival, C.J. The development and trial of an unmanned aerial system for the measurement of methane flux from landfill and greenhouse gas emission hotspots. Waste Manag. 2019, 87, 883–892. [Google Scholar] [CrossRef]
- Darynova, Z.; Blanco, B.; Juery, C.; Donnat, L.; Duclaux, O. Data assimilation method for quantifying controlled methane releases using a drone and ground-sensors. Atmos. Environ. 2023, X 17, 100210. [Google Scholar] [CrossRef]
- Morales, R.; Ravelid, J.; Vinkovic, K.; Korbe, P.; Tuzson, B.; Emmenegger, L.; Chen, H.; Schmidt, M.; Humbel, S.; Brunner, D. Controlled-release experiment to investigate uncertainties in UAV-based emission quantification for methane point sources. Atmos. Meas. Tech. 2022, 15, 2177–2198. [Google Scholar] [CrossRef]
- Hollenbeck, D.; Zulevic, D.; Chen, Y.Q. Advanced leak detection and quantification of methane emissions using sUAS. Drones 2021, 5, 117. [Google Scholar] [CrossRef]
- Kim, Y.M.; Park, M.H.; Jeong, S.; Lee, K.H.; Kim, J.Y. Evaluation of error inducing factors in unmanned aerial vehicle mounted detector to measure fugitive methane from solid waste landfill. Waste Manag. 2021, 124, 368–376. [Google Scholar] [CrossRef]
- Corbett, A.; Smith, B. A Study of a Miniature TDLAS System Onboard Two Unmanned Aircraft to Independently Quantify Methane Emissions from Oil and Gas Production Assets and Other Industrial Emitters. Atmosphere 2022, 13, 804. [Google Scholar] [CrossRef]
- Iwaszenko, S.; Kalisz, P.; Słota, M.; Rudzki, A. Detection of Natural Gas Leakages Using a Laser-Based Methane Sensor and UAV. Remote Sens. 2021, 13, 510. [Google Scholar] [CrossRef]
- Barchyn, T.E.; Hugenholtz, C.H.; Fox, T.A. Plume detection modeling of a drone-based natural gas leak detection system. Elem. Sci. Anthr. 2019, 7, 41. [Google Scholar] [CrossRef]
- Ruckstuhl, A.F.; Henne, S.; Reimann, S.; Steinbacher, M.; Vollmer, M.K.; O’Doherty, S.; Buchmann, B.; Hueglin, C. Robust extraction of baseline signal of atmospheric trace species using local regression. Atmos. Meas. Tech. 2012, 5, 2613–2624. [Google Scholar] [CrossRef]
- Yong, H.; Allen, G.; Mcquilkin, J.; Ricketts, H.; Shaw, J.T. Lessons learned from a UAV survey and methane emissions calculation at a UK landfill. Waste Manag. 2024, 180, 47–54. [Google Scholar] [CrossRef] [PubMed]
- Tassielli, G.; Cananà, L. Environmental monitoring via drone: Development of algorithms for correcting background measurements. In Proceedings of the XXXII National Congress on Commodity Science, Lecce, Italy, 19–20 September 2024. [Google Scholar]
- Yang, S.; Talbot, R.W.; Frish, M.B.; Golston, L.M.; Aubut, N.F.; Zondlo, M.A.; Gretencord, C.; McSpiritt, J. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Measurement System Description and Mass Balance Approach. Atmosphere 2018, 9, 383. [Google Scholar] [CrossRef]
- Shaw, J.T.; Shah, A.; Yong, H.; Allen, G. Methods for quantifying methane emissions using unmanned aerial vehicles: A review. Philos. Trans. R. Soc. A 2021, 379, 20200450. [Google Scholar] [CrossRef]
- Hollenbeck, D.; Dahabra, M.; Christensen, L.E.; Chen, Y.Q. Data quality aware flight mission design for fugitive methane sniffing using fixed wind sUAS. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019. [Google Scholar]
- Neumann, P.P.; Kohlhoff, H.; Hüllmann, D.; Krentel, D.; Kluge, M.; Dzierliński, M.; Lilienthal, A.J.; Bartholmai, M. Aerial-based gas tomography—From single beams to complex gas distributions. Eur. J. Remote Sens. 2019, 52 (Suppl. 3), 2–16. [Google Scholar] [CrossRef]
- Brantley, H.L.; Thoma, E.D.; Squier, W.C.; Guven, B.B.; Lyon, D. Assessment of methane emissions from oil and gas production pads using mobile measurements. Environ. Sci. Technol. 2014, 48, 14508–14515. [Google Scholar] [CrossRef] [PubMed]
- Yacovitch, T.I.; Neininger, B.; Herndon, S.C.; Denier van der Gon, H.; Jonkers, S.; Hulskotte, J.; Roscioli, J.; Zavala-Araiza, D. Methane emissions in the Netherlands: The Groningen field. Elem. Sci. Anthr. 2018, 6, 57. [Google Scholar] [CrossRef]
- Gålfalk, M.; Påledal, S.N.; Bastviken, D. Sensitive drone mapping of methane emissions without the need for supplementary ground-based measurements. ACS Earth Space Chem. 2021, 5, 2668–2676. [Google Scholar] [CrossRef]
- Pätzold, F.; Bauknecht, A.; Schlerf, A.; Sotomayor Zakharov, D.; Bretschneider, L.; Lampert, A. Flight Experiments and Numerical simulations for investigating multicopter flow field and structure deformation. Atmosphere 2023, 14, 1336. [Google Scholar] [CrossRef]
- Nathan, B.J.; Golston, L.M.; O’Brien, A.S.; Ross, K.; Harrison, W.A.; Tao, L.; Lary, D.J.; Johnson, D.R.; Covington, A.N.; Clark, N.N.; et al. Near-field characterization of methane emission variability from a compressor station using a model aircraft. Environ. Sci. Technol. 2015, 49, 7896–7903. [Google Scholar] [CrossRef] [PubMed]
- Golston, L.M.; Aubut, N.F.; Frish, M.B.; Yang, S.; Talbot, R.W.; Gretencord, C.; McSpiritt, J.; Zondlo, M.A. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Localization and Quantification of Emission Rate. Atmosphere 2018, 9, 333. [Google Scholar] [CrossRef]
- Cambaliza MO, L.; Shepson, P.B.; Caulton, D.R.; Stirm, B.; Samarov, D.; Gurney, K.R.; Turnbull, J.; Davis, K.J.; Possolo, A.; Karion, A.; et al. Assessment of uncertainties of an aircraft-based mass balance approach for quantifying urban greenhouse gas emissions. Atmos. Chem. Phys. 2014, 14, 9029–9050. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Survey n. 1 | Survey n. 2 | Survey n. 3 | Survey n. 4 |
|---|---|---|---|---|
| Date | 6 February 2024 | 6 February 2024 | 7 February 2024 | 7 February 2024 |
| Survey start time | 10:00 | 15:00 | 9:00 | 12:30 |
| Area * | SA | SA | SA | SA |
| Type of surface | Short vegetation | Short vegetation | Short vegetation Concrete floor | Concrete floor |
| Flight altitude | 7, 10, 15, 20 m | 7, 10, 15, 20 m | 7 m | 7, 10 m |
| UAV speed | 0.5, 1, 2, 3, 4 ms−1 | 1, 2, 3 ms−1 | 0.5, 1, 2 ms−1 | 1 ms−1 |
| Weather condition | Clear sky | Clear sky | Clear sky | Clear sky |
| Average wind speed | 2.2 ms−1 | 1.6 ms−1 | 1.7 ms−1 | 3.2 ms−1 |
| Notes |
|
|
| |
| Parameters | Survey n. 5 | Survey n. 6 | Survey n. 7 | Survey n. 8 |
| Date | 28 May 2024 | 28 May 2024 | 2 July 2024 | 5 July 2024 |
| Survey start time | 10:00 | 12:00 | 10:00 | 10:00 |
| Area * | AA | AA | IA | IA |
| Type of surface | Wheat field with tall plants | White gravel road | Gravel | Gravel |
| Flight altitude | 7, 10, 15, 20, 25, 30 m | 7, 10, 15, 20, 30, 40 m | 7, 10, 15, 20, 25 m | 7, 10, 15, 20 m |
| UAV speed | 1, 2 ms−1 | 0, 1, 2 ms−1 | 1, 2 ms−1 | 2 ms−1 |
| Weather condition | Clear, partly cloudy sky | Clear, partly cloudy sky | Clear sky | Completely overcast sky |
| Average wind speed | 4.2 ms−1 | 4.0 ms−1 | 2.2 ms−1 | 3.1 ms−1 |
| Notes |
|
|
| Statistical Indicator | Unit | Initial Data of the Methane Background | Final Indicators of the Methane Background after Applying the Correction Algorithm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 7 m | 10 m | 15 m | 20 m | 7 m | 10 m | 15 m | 20 m | ||
| Mean | ppm*m | 26.21 | 32.32 | 36.37 | 48.30 | 13.50 | 18.17 | 26.98 | 40.53 |
| SD | ppm*m | 110.14 | 113.11 | 91.41 | 70.57 | 15.87 | 15.83 | 19.24 | 28.65 |
| CV | % | 420% | 350% | 251% | 146% | 118% | 87% | 71% | 71% |
| Skewness | 16.15 | 15.97 | 22.50 | 15.26 | 2.81 | 1.67 | 0.66 | 0.65 | |
| Num. Obs. | n. | 1610 | 1450 | 1520 | 1220 | 1548 | 1374 | 1443 | 1162 |
| Num. Outliers | n. | - | - | - | - | 62 | 76 | 77 | 58 |
| % Outliers | % | - | - | - | - | 3.9% | 5.2% | 5.1% | 4.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tassielli, G.; Cananà, L.; Spalatro, M. Detection of Methane Leaks via a Drone-Based System for Sustainable Landfills and Oil and Gas Facilities: Effect of Different Variables on the Background-Noise Measurement. Sustainability 2024, 16, 7748. https://doi.org/10.3390/su16177748
Tassielli G, Cananà L, Spalatro M. Detection of Methane Leaks via a Drone-Based System for Sustainable Landfills and Oil and Gas Facilities: Effect of Different Variables on the Background-Noise Measurement. Sustainability. 2024; 16(17):7748. https://doi.org/10.3390/su16177748
Chicago/Turabian StyleTassielli, Giuseppe, Lucianna Cananà, and Miriam Spalatro. 2024. "Detection of Methane Leaks via a Drone-Based System for Sustainable Landfills and Oil and Gas Facilities: Effect of Different Variables on the Background-Noise Measurement" Sustainability 16, no. 17: 7748. https://doi.org/10.3390/su16177748