
Travel Time Estimation for Urban Arterials Based on the Multi-Source Data


Abstract
:1. Introduction
2. Preliminaries
2.1. Terminology Definitions
2.2. Assumptions
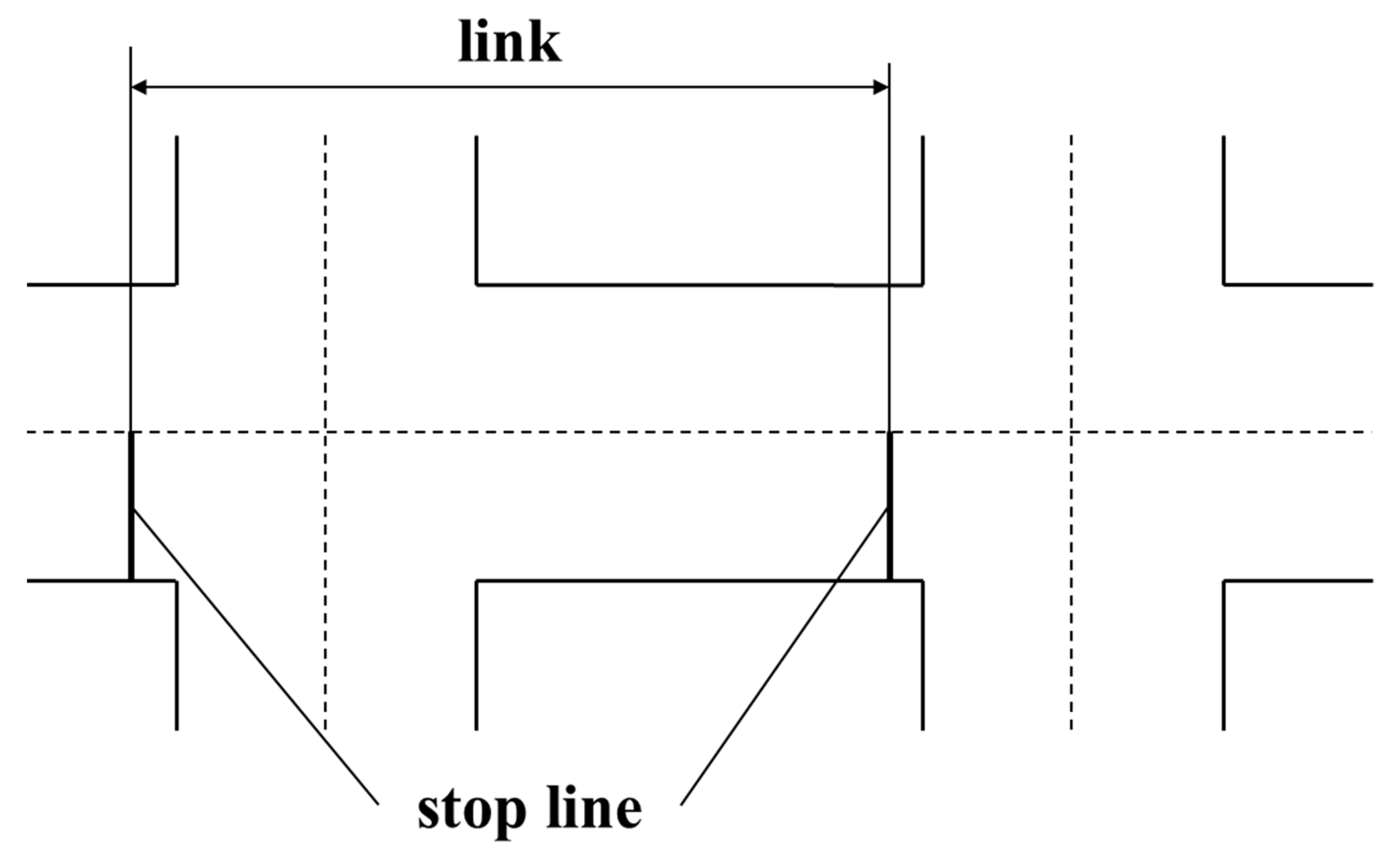
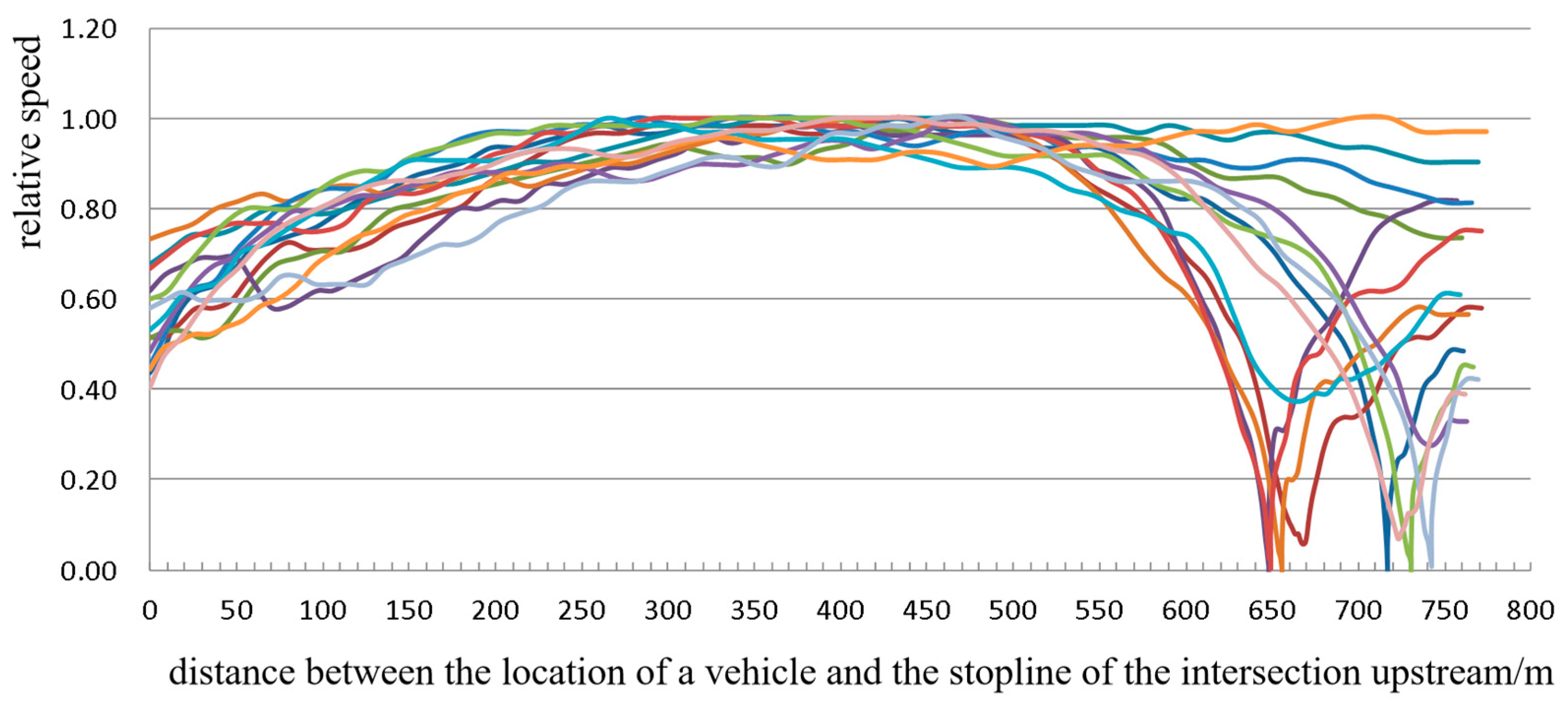
2.3. Driving Behavior along an Arterial Link
2.4. BPR Function
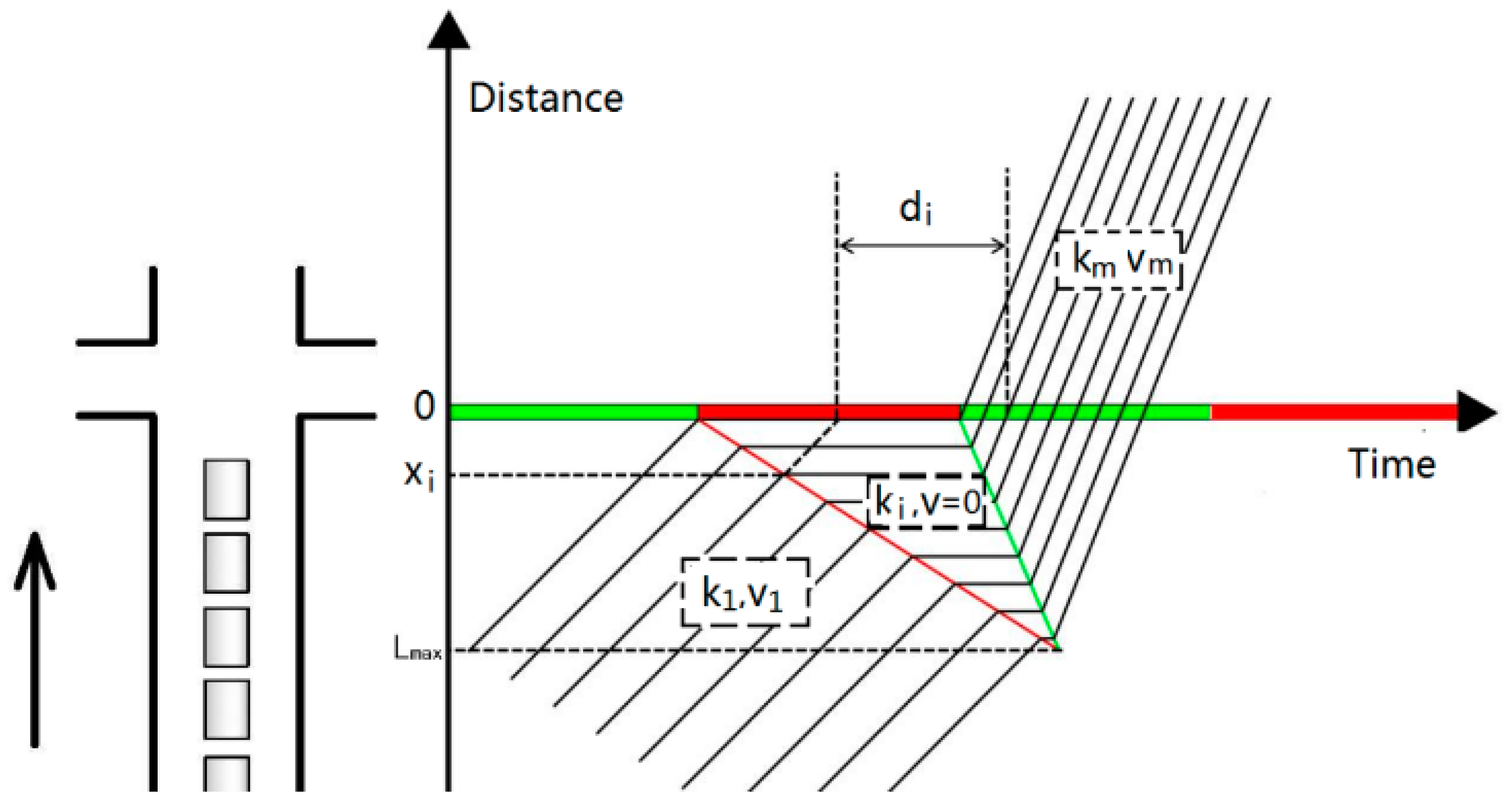
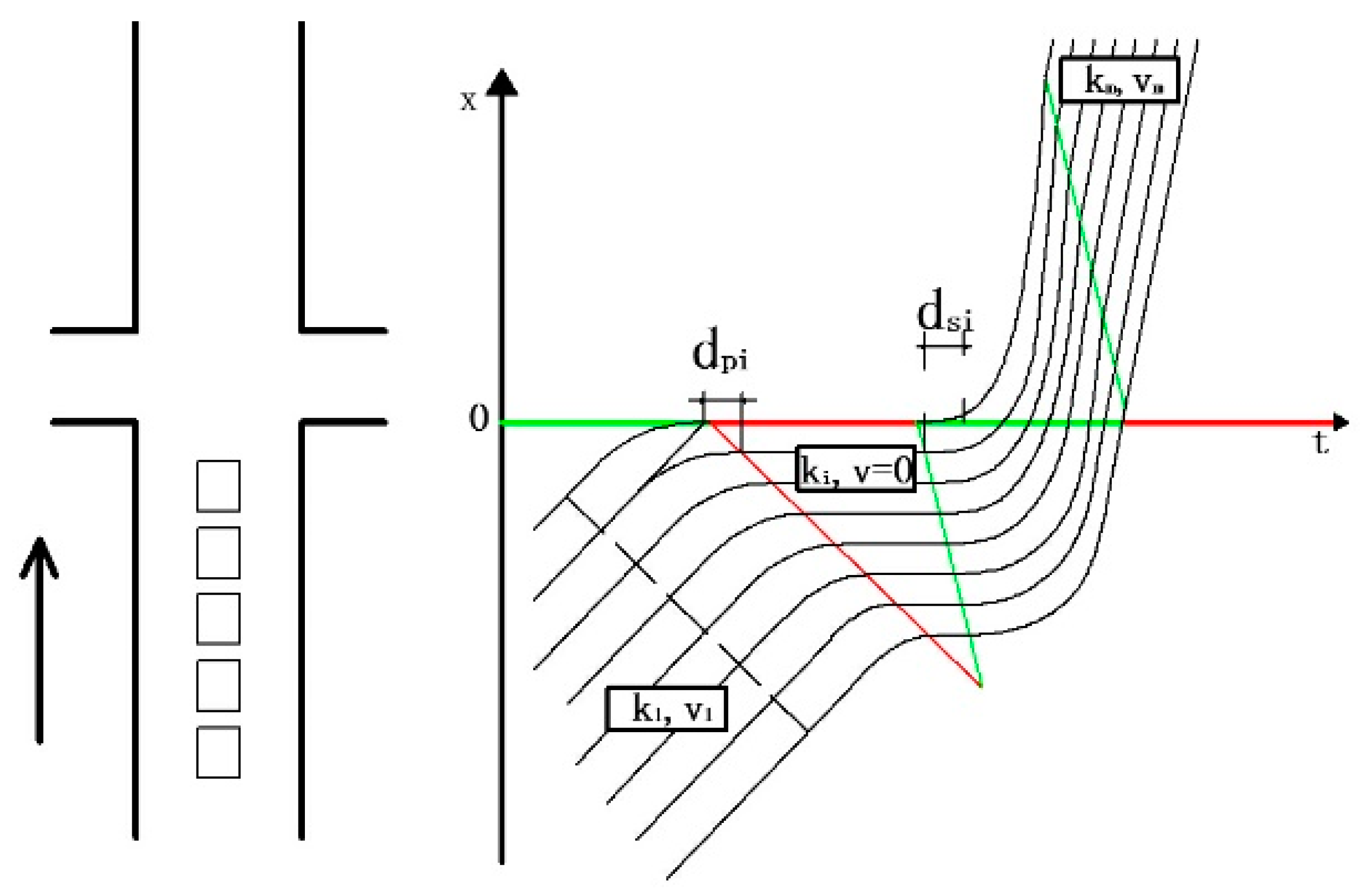
2.5. Queue Forming and Discharging Process
3. Methodology
3.1. Accelerating Section
3.2. Constant-Speed Section
3.3. Decelerating Section
4. Case Study
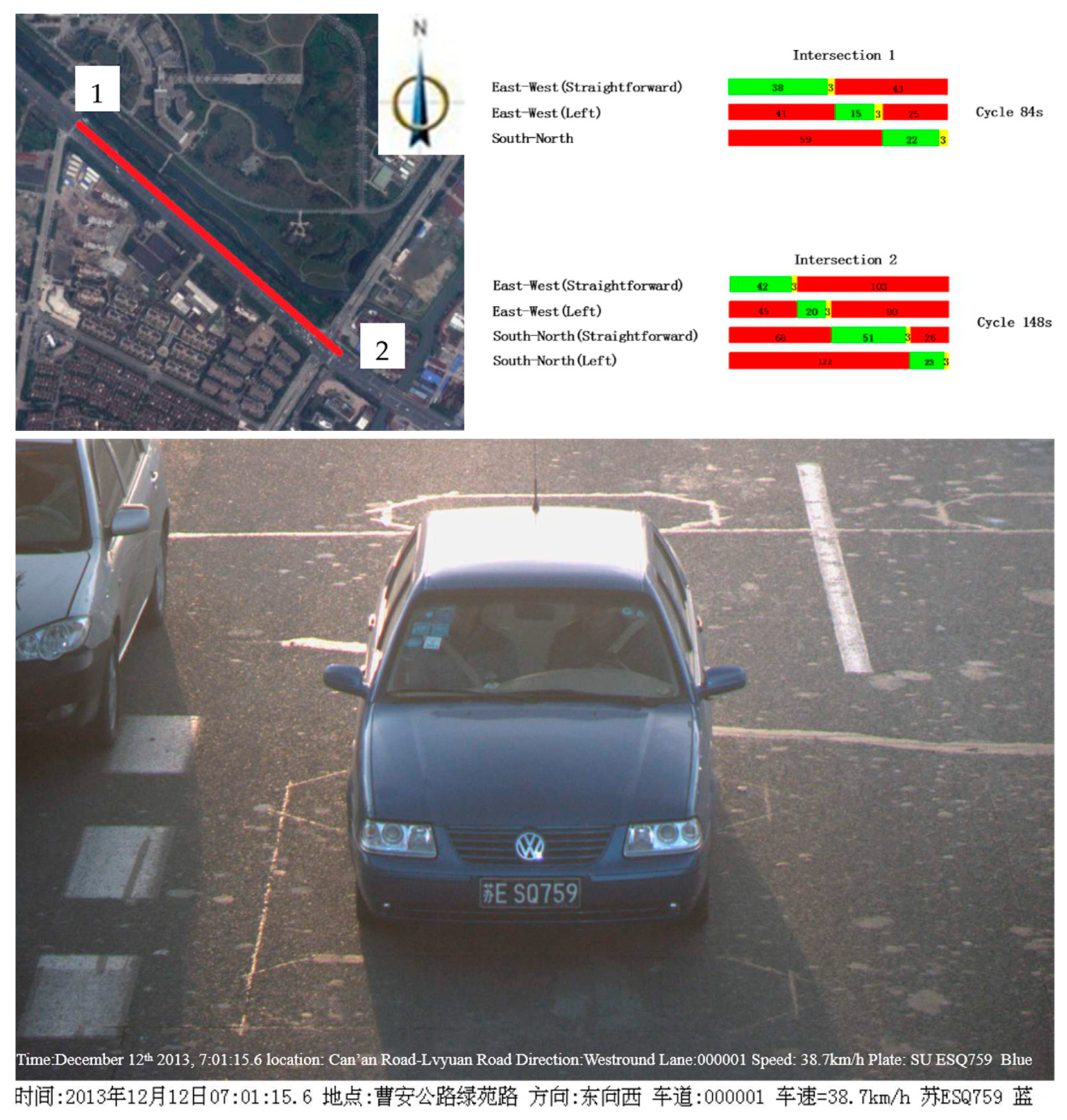
4.1. Field Data Collection
4.2. Data Analysis
5. Conclusions
- (1)
- The proposed model posits that travel time is decomposed into three distinct phases, which are typically congruent with Floating Car Data (FCD) trajectories. Nonetheless, the model acknowledges that variables such as arterial link length and prevailing traffic conditions may exert a significant influence on this segmentation.
- (2)
- The current model predominantly concentrates on through traffic, thereby necessitating subsequent research to elucidate the impact of turning behavior on the estimation of travel time and the precision of the model.
- (3)
- The model in question leverages probe data captured at one-second intervals. Although the model is capable of incorporating extended observation intervals, there exists a potential trade-off between the frequency of data collection and the fidelity of the travel time estimations.
- (4)
- The case study conducted indicates a positive correlation between an increased number of floating cars and enhanced estimation accuracy. However, the precise effect of the FCD sample size on this metric requires further elucidation.
- (5)
- The model necessitates data from both the current (k) and the subsequent (k + 1) links to facilitate precise travel time estimations. Acquiring data pertaining to the latter present certain challenges. It is imperative for future research to investigate alternative data procurement avenues or methodologies that may ameliorate this constraint.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, W.; Chuanjiu, W.; Xiaorong, S.; Yuezu, F. Probe vehicle sampling for real-time traffic data collection. In Proceedings of the IEEE Intelligent Transportation Systems, Vienna, Austria, 13–15 September 2005; pp. 222–224. [Google Scholar]
- Tang, J.; Hu, J.; Hao, W.; Chen, X.; Qi, Y. Markov Chains based route travel time estimation considering link spatio-temporal correlation. Phys. A Stat. Mech. Its Appl. 2020, 545, 123759. [Google Scholar] [CrossRef]
- Tang, J.; Yang, Y.; Qi, Y. A hybrid algorithm for urban transit schedule optimization. Phys. A Stat. Mech. Its Appl. 2018, 512, 745–755. [Google Scholar] [CrossRef]
- Zong, F.; Tian, Y.; He, Y.; Tang, J.; Lv, J. Trip destination prediction based on multi-day GPS data. Phys. A Stat. Mech. Its Appl. 2019, 515, 258–269. [Google Scholar] [CrossRef]
- Chen, M.; Chien, S. Dynamic freeway travel-time prediction with probe vehicle data: Link based versus path based. Transp. Res. Rec. 2001, 1768, 157–161. [Google Scholar] [CrossRef]
- Feng, W.; Bigazzi, A.Y.; Kothuri, S.; Bertini, R.L. Freeway sensor spacing and probe vehicle penetration: Impacts on travel time prediction and estimation accuracy. Transp. Res. Rec. 2010, 2178, 67–78. [Google Scholar] [CrossRef]
- Rahmani, M.; Jenelius, E.; Koutsopoulos, H.N. Floating car and camera data fusion for non-parametric route travel time es-timation. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014; IEEE: Piscataway Township, NJ, USA, 2014. [Google Scholar]
- Ma, C.; He, R.; Zhang, W. Path optimization of taxi carpooling. PLoS ONE 2018, 13, e0203221. [Google Scholar] [CrossRef] [PubMed]
- Lu, L.; Wang, J.; He, Z.; Chan, C.-Y. Real-time estimation of freeway travel time with recurrent congestion based on sparse detector data. IET Intell. Transp. Syst. 2018, 12, 2–11. [Google Scholar] [CrossRef]
- van Lint, J.W.C.; van der Zijpp, N.J. Improving a Travel-Time Estimation Algorithm by Using Dual Loop Detectors. Transp. Res. Rec. J. Transp. Res. Board 2003, 1855, 41–48. [Google Scholar] [CrossRef]
- Zhang, C.; Chen, B.Y.; Lam, W.H.K.; Ho, H.W.; Shi, X.; Yang, X.; Ma, W.; Wong, S.C.; Chow, A.H.F. Vehicle Re-identification for Lane-level Travel Time Estimations on Congested Urban Road Networks Using Video Images. IEEE Trans. Intell. Transp. Syst. 2022, 23, 12877–12893. [Google Scholar] [CrossRef]
- Xia, D.; Zheng, L.; Tang, Y.; Cai, X.; Chen, L.; Liu, W.; Sun, D. Link-Based Traffic Estimation and Simulation for Road Networks Using Electronic Registration Identification Data. IEEE Trans. Veh. Technol. 2022, 71, 8075–8088. [Google Scholar] [CrossRef]
- Zhu, Y.; He, Z.; Zhang, X. Optimal number and locations of automatic vehicle identification sensors considering link travel time estimation. IET Intell. Transp. Syst. 2023, 17, 1846–1859. [Google Scholar] [CrossRef]
- Osei, K.K.; Adams, C.A.; Sivanandan, R.; Ackaah, W. Modelling of segment level travel time on urban roadway arterials using floating vehicle and GPS probe data. Sci. Afr. 2022, 15, e01105. [Google Scholar] [CrossRef]
- Gündüz, G.; Acarman, T. Vehicle Travel Time Estimation Using Sequence Prediction. Promet-Traffic Transp. 2020, 32, 1–12. [Google Scholar] [CrossRef]
- Jedwanna, K.; Boonsiripant, S. Evaluation of Bluetooth Detectors in Travel Time Estimation. Sustainability 2022, 14, 4591. [Google Scholar] [CrossRef]
- Lee, K.; Prokhorchuk, A.; Dauwels, J.; Jaillet, P. Estimation of travel time from taxi GPS data. In Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, USA, 27 November–1 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Sun, T.; Zhao, K.; Zhang, C.; Chen, M.; Yu, X. PR-LTTE: Link travel time estimation based on path recovery from large-scale incomplete trip data. Inf. Sci. 2020, 589, 34–45. [Google Scholar] [CrossRef]
- Cao, J.; Du, Y.; Mao, L.; Ji, Y.; Ma, F.; Wang, X. Improved DTTE Method for Route-Level Travel Time Estimation on Freeways. J. Transp. Eng. Part A Syst. 2021, 148, 04021113. [Google Scholar] [CrossRef]
- Li, A.; Lam, W.H.; Ma, W.; Wong, S.; Chow, A.H.; Tam, M.L. Real-time estimation of multi-class path travel times using multi-source traffic data. Expert Syst. Appl. 2024, 237, 121613. [Google Scholar] [CrossRef]
- Jin, G.; Wang, M.; Zhang, J.; Sha, H.; Huang, J. STGNN-TTE: Travel time estimation via spatial–temporal graph neural network. Future Gener. Comput. Syst. 2022, 126, 70–81. [Google Scholar] [CrossRef]
- Kim, H.; Ye, L. Bayesian Mixture Model to Estimate Freeway Travel Time under Low-Frequency Probe Data. Appl. Sci. 2022, 12, 6483. [Google Scholar] [CrossRef]
- Choi, K.; Chung, Y. A Data Fusion Algorithm for Estimating Link Travel Time. J. Intell. Transp. Syst. 2002, 7, 235–260. [Google Scholar] [CrossRef]
- Li, H.; Yang, X. Data fusion method on modifying sampling bias of floating cars. J. Tongji Univ. (Nat. Sci.) 2012, 40, 1498–1503. [Google Scholar] [CrossRef]
- Liang, Z.; Ling-Xiang, Z. Link Travel Time Estimation Model Fusing Data from Mobile and Stationary Detector Based on BP Neural Network. In Proceedings of the 2006 International Conference on Communications, Circuits and Systems, Guilin, China, 25–28 June 2006; pp. 2146–2149. [Google Scholar]
- Bhaskar, A.; Chung, E.; Dumont, A.-G. Average Travel Time Estimations for Urban Routes that Consider Exit Turning Movements. Transp. Res. Rec. 2012, 2308, 47–60. [Google Scholar] [CrossRef]
- Celikoglu, H.B. Flow-Based Freeway Travel-Time Estimation: A Comparative Evaluation within Dynamic Path Loading. IEEE Trans. Intell. Transp. Syst. 2013, 14, 772–781. [Google Scholar] [CrossRef]
- Wang, S.; Patwary, A.; Huang, W.; Lo, H.K. A general framework for combining traffic flow models and Bayesian network for traffic parameters estimation. Transp. Res. Part C Emerg. Technol. 2022, 139, 103664. [Google Scholar] [CrossRef]
- Wang, S.; Huang, W.; Lo, H.K. Combining shockwave analysis and Bayesian Network for traffic parameter estimation at signalized intersections considering queue spillback. Transp. Res. Part C Emerg. Technol. 2020, 120, 102807. [Google Scholar] [CrossRef]
- Claudel, C.; Hofleitner, A.; Mignerey, N.; Bayen, A. Guaranteed bounds on highway travel times using probe and fixed data. In Proceedings of the 88th TRB Annual Meeting Compendium of Papers, Washington, DC, USA, 11–15 January 2009. [Google Scholar]
- Berkow, M.; Monsere, C.M.; Koonce, P.; Bertini, R.L.; Wolfe, M. Prototype for Data Fusion Using Stationary and Mobile Data. Transp. Res. Rec. 2009, 2099, 102–112. [Google Scholar] [CrossRef]
- Zheng, L.; Ma, H.; Wu, B.; Wang, Z.; Cai, Q. Estimation of Travel Time of Different Vehicle Types at Urban Streets Based on Data Fusion of Multisource Data. In Proceedings of the 14th COTA International Conference of Transportation Professionals, Changsha, China, 4–7 July 2014. [Google Scholar]
- He, N.; Zhao, S. Discussion on Influencing Factors of Free-flow Travel Time in Road Traffic Impedance Function. Procedia-Soc. Behav. Sci. 2013, 96, 90–97. [Google Scholar] [CrossRef]
- Pan, Y.; Zheng, H.; Guo, J.; Chen, Y. Modified Volume-Delay Function Based on Traffic Fundamental Diagram: A Practical Calibration Framework for Estimating Congested and Uncongested Conditions. J. Transp. Eng. Part A Syst. 2023, 149, 4023112.1–4023112.14. [Google Scholar] [CrossRef]
- Branston, D. Link capacity functions: A review. Transp. Res. 1976, 10, 223–236. [Google Scholar] [CrossRef]
- Lighthill, M.J.; Whitham, G.B. On kinematic waves. ii. A theory of traffic flow on long crowded roads. Proc. R. Soc. A Math. Phys. Eng. Sci. 1985, 229, 317–345. [Google Scholar]
- Sakhare, R.S.; Li, H.; Bullock, D.M. Methodology for the Identification of Shock Wave Type and Speed in a Traffic Stream Using Connected Vehicle Data. Futur. Transp. 2023, 3, 1147–1174. [Google Scholar] [CrossRef]
- Zhang, Y.; Kouvelas, A.; Makridis, M.A. A time-varying shockwave speed model for reconstructing trajectories on freeways using Lagrangian and Eulerian observations. Expert Syst. Appl. 2024, 253, 124298. [Google Scholar] [CrossRef]
- Wang, W. Practical speed-flow relationship model of highway traffic-flow. Dongnan Daxue Xuebao/J. Southeast Univ. (Nat. Sci. Ed.) 2003, 33, 487–491. [Google Scholar]
- Mousa, R.M. Analysis and Modeling of Measured Delays at Isolated Signalized Intersections. J. Transp. Eng. 2002, 128, 347–354. [Google Scholar] [CrossRef]
- Bing, Q.; Qu, D.; Chen, X.; Pan, F.; Wei, J. Arterial travel time estimation method using SCATS traffic data based on KNN-LSSVR model. Adv. Mech. Eng. 2019, 11, 1687814019841926. [Google Scholar] [CrossRef]
- Hu, X.; Yang, D. Link travel time estimation based on data fusion. J. Transp. Inf. Saf. 2011, 29, 92–98. [Google Scholar] [CrossRef]
- Loe, L.E.; Bonenfant, C.; Meisingset, E.L.; Mysterud, A. Effects of spatial scale and sample size in GPS-based species distribution models: Are the best models trivial for red deer management? Eur. J. Wildl. Res. 2012, 58, 195–203. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
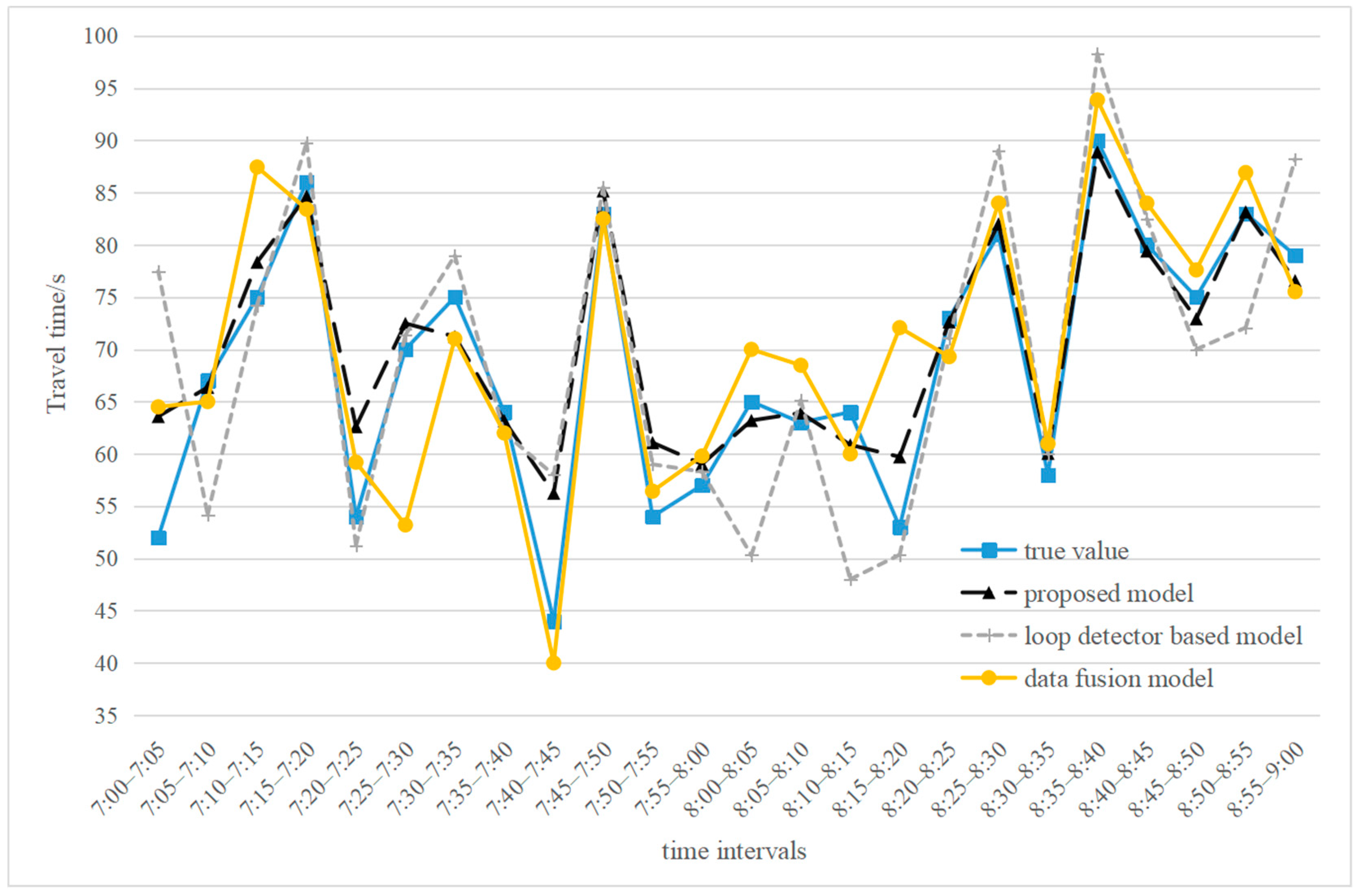
| Study Intervals | True Value | APE% | ||
|---|---|---|---|---|
| Proposed Model | Loop Detector Based Model | Data Fusion Model | ||
| 7:00–7:05 | 52 | 22.27 | 49.00 | 24.04 |
| 7:05–7:10 | 67 | −0.94 | −19.13 | −2.99 |
| 7:10–7:15 | 75 | 4.46 | −1.07 | 16.60 |
| 7:15–7:20 | 86 | −1.55 | 4.37 | −3.00 |
| 7:20–7:25 | 54 | 15.94 | −5.11 | 9.63 |
| 7:25–7:30 | 70 | 3.55 | 1.97 | −24.00 |
| 7:30–7:35 | 75 | −5.03 | 5.29 | −5.31 |
| 7:35–7:40 | 64 | −1.27 | −3.11 | −3.13 |
| 7:40–7:45 | 44 | 27.82 | 31.82 | −9.09 |
| 7:45–7:50 | 83 | 2.61 | 3.01 | −0.60 |
| 7:50–7:55 | 54 | 13.11 | 9.26 | 4.50 |
| 7:55–8:00 | 57 | 3.54 | 2.28 | 4.91 |
| 8:00–8:05 | 65 | −2.77 | −22.62 | 7.69 |
| 8:05–8:10 | 63 | 1.46 | 3.37 | 8.70 |
| 8:10–8:15 | 64 | −4.90 | −25.00 | −6.25 |
| 8:15–8:20 | 53 | 12.67 | −5.00 | 36.00 |
| 8:20–8:25 | 73 | −0.50 | −2.60 | −5.07 |
| 8:25–8:30 | 81 | 1.25 | 9.93 | 3.70 |
| 8:30–8:35 | 58 | 3.55 | 3.45 | 5.14 |
| 8:35–8:40 | 90 | −1.24 | 9.20 | 4.30 |
| 8:40–8:45 | 80 | −0.73 | 3.13 | 5.00 |
| 8:45–8:50 | 75 | −2.76 | −6.67 | 3.47 |
| 8:50–8:55 | 83 | 0.20 | −13.16 | 4.72 |
| 8:55–9:00 | 79 | −3.06 | 11.65 | −4.41 |
| Mean Absolute Deviation | 5.72 | 10.47 | 8.43 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, L.; Ma, H.; Wang, Z. Travel Time Estimation for Urban Arterials Based on the Multi-Source Data. Sustainability 2024, 16, 7845. https://doi.org/10.3390/su16177845
Zheng L, Ma H, Wang Z. Travel Time Estimation for Urban Arterials Based on the Multi-Source Data. Sustainability. 2024; 16(17):7845. https://doi.org/10.3390/su16177845
Chicago/Turabian StyleZheng, Lingyu, Hao Ma, and Zhongyu Wang. 2024. "Travel Time Estimation for Urban Arterials Based on the Multi-Source Data" Sustainability 16, no. 17: 7845. https://doi.org/10.3390/su16177845