Analysis and Suppression of Oscillations in Doubly Fed Variable Speed Pumped Storage Hydropower Plants Considering the Water Conveyance System


Abstract
1. Introduction
2. DFVSPS Mathematical Model
2.1. Model of Water Conveyance and Pump-Turbine System
2.2. Model of DFIG
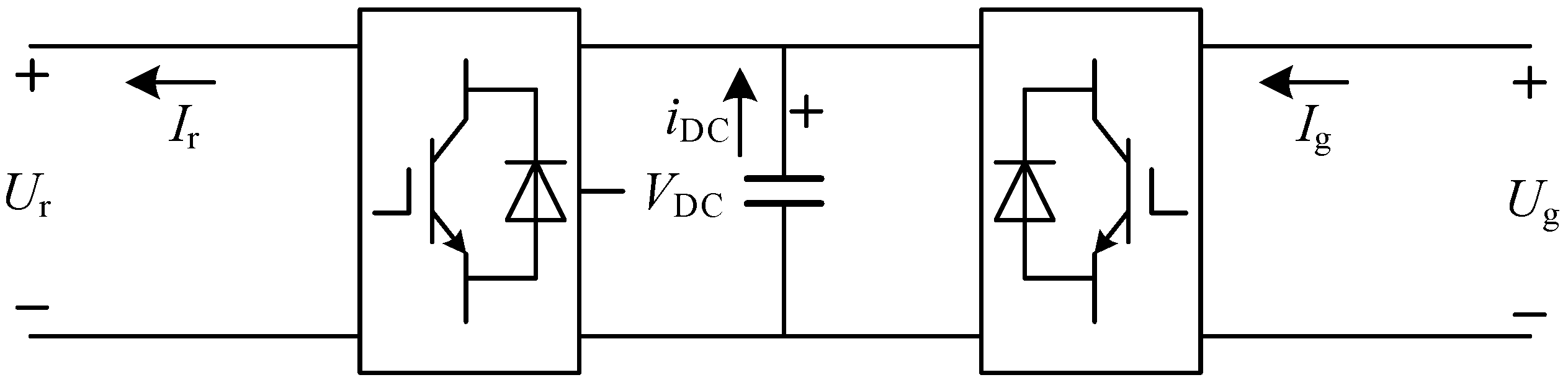
2.3. Model of the Back-to-Back Rotor Converters
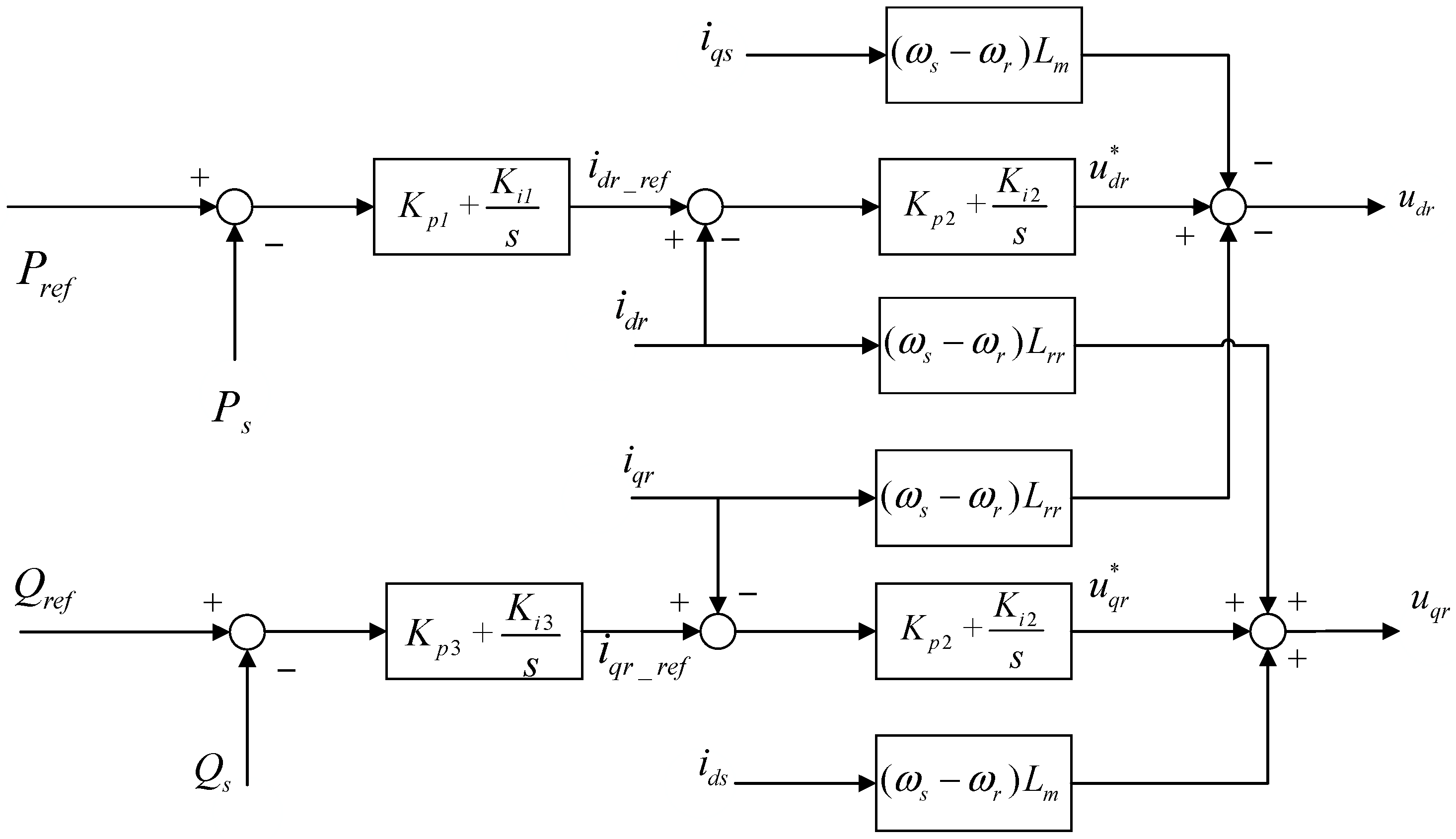
2.3.1. Rotor-Side Converter Controller Model
2.3.2. Grid-Side Converter Controller Model
2.4. Model of Series Compensation Line
2.5. Dynamic Model of DFVSPS
3. System Oscillation Characteristics Analysis
4. Analysis of the Suppression Effect of Controller Parameters on DFVSPS System Oscillations
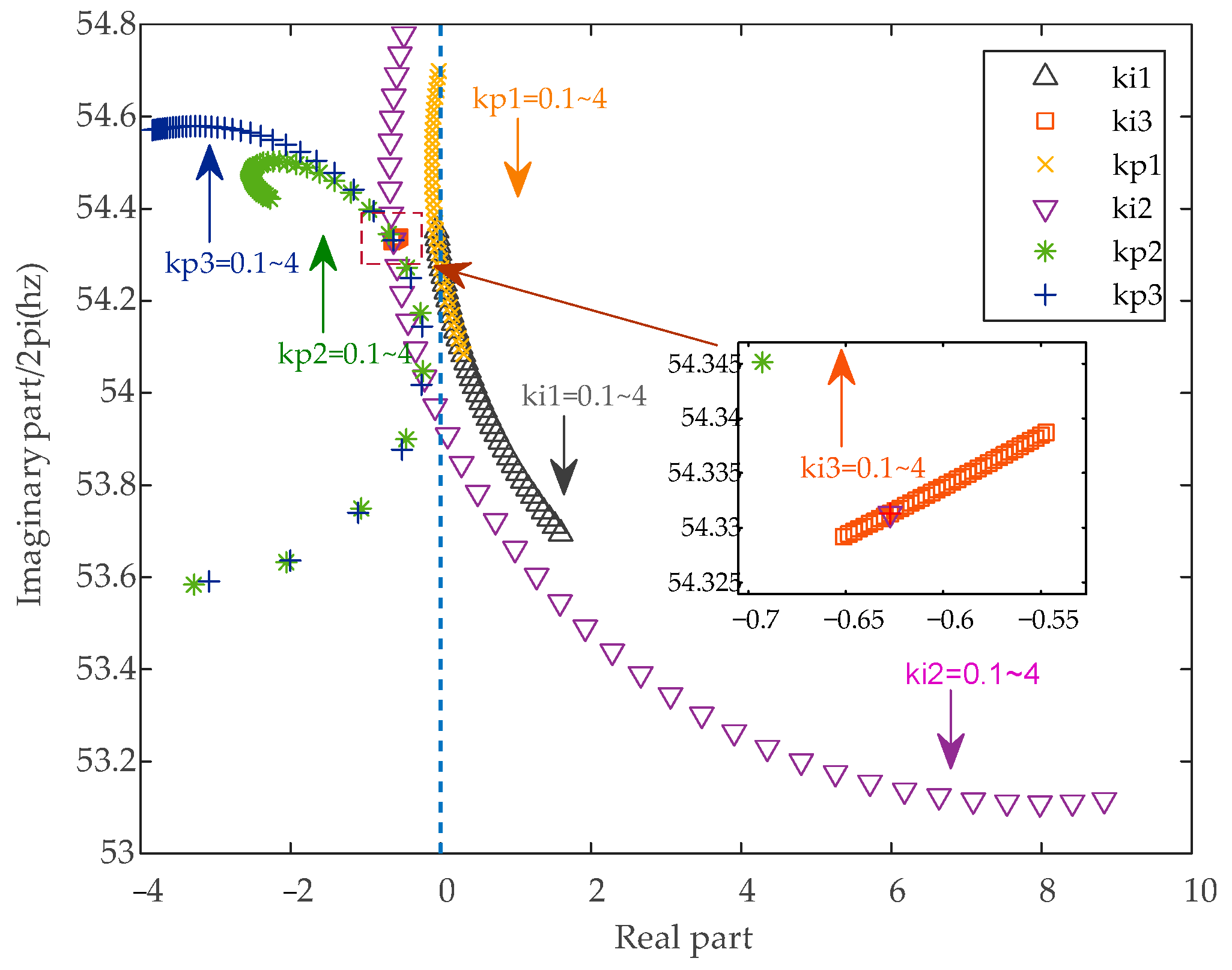
4.1. Analysis of the Suppression Effect of SSOs by Rotor-Side PI Controller Parameters
4.2. Analysis of the Suppression Effect of Low-Frequency Oscillations by Hydraulic–Mechanical System Parameters
5. Discussion
- (1)
- Complete theoretical model: This paper establishes a complete DFVSPS system model, considering the water conveyance system to the transmission lines, and develops modular, detailed subsystem models. This approach facilitates the study of the hydro-mechanical–electrical coupling relationships and the impact of each subsystem on the overall model.
- (2)
- Effect of series compensation on oscillations: Based on the similarity in structure between DFVSPS and DFIG, a scenario was built where the DFVSPS system is connected to the grid through series compensation. The impact of different levels of series compensation on the system’s oscillatory characteristics was then analyzed.
- (3)
- Relative participation analysis: Based on the constructed state-space model, this paper analyzes the influence of various state variables on the system’s oscillatory modes. This helps identify key state variables and allows for their adjustment to enhance system stability.
- (4)
- Effect of controller parameters on oscillations: Using the model established in this paper, the impact and suppression effects of different controller parameters on SSOs in the electrical part and low-frequency oscillations in the hydro-mechanical part were analyzed. The stable range of control parameters was determined, and guidance on how to adjust controller parameters based on real-world conditions was provided.
- (1)
- The limitation of the small-signal model established in this paper lies in its assumption that the input signals to the system are sufficiently small, allowing the linearization approximation to hold. This restricts its applicability in cases involving nonlinear or large-amplitude signals.
- (2)
- This paper only considers the DFVSPS system operating in generation mode. Whether the system can utilize its characteristics to enhance power system stability when operating in pumping mode remains a question for future research.
- (3)
- This paper analyzes the suppression effect of controller parameters on the system’s small disturbance stability, focusing on selecting appropriate fixed initial parameters to ensure system stability. In the future, it may be beneficial to consider incorporating optimization methods such as artificial intelligence and deep learning for the real-time tracking and adjustment of the system’s controller parameters to achieve better control outcomes.
- (4)
- In the future, the focus of research on SSOs in the DFVSPS system should be on the electrical oscillations induced by the converter control system; the hydraulic system parameters are the key focus for studying low-frequency oscillations in the system. Efforts should focus on optimizing controller parameters, adding damping controllers, and other methods to better suppress oscillations in the DFVSPS system. For example, artificial intelligence or machine learning can adaptively adjust control parameters by analyzing system data and operating conditions in real time, ensuring optimal performance under various operating scenarios. With these technologies, control systems can respond more flexibly to complex working conditions.
6. Conclusions
- (1)
- The SSO modes induced by the integration of a DFVSPS system with a series-compensated transmission line are significantly correlated with the dynamics of the line capacitance, inductance, the induction generator, and the rotor-side control system. In contrast, the low-frequency mechanical oscillation modes are solely related to the hydraulic–mechanical components.
- (2)
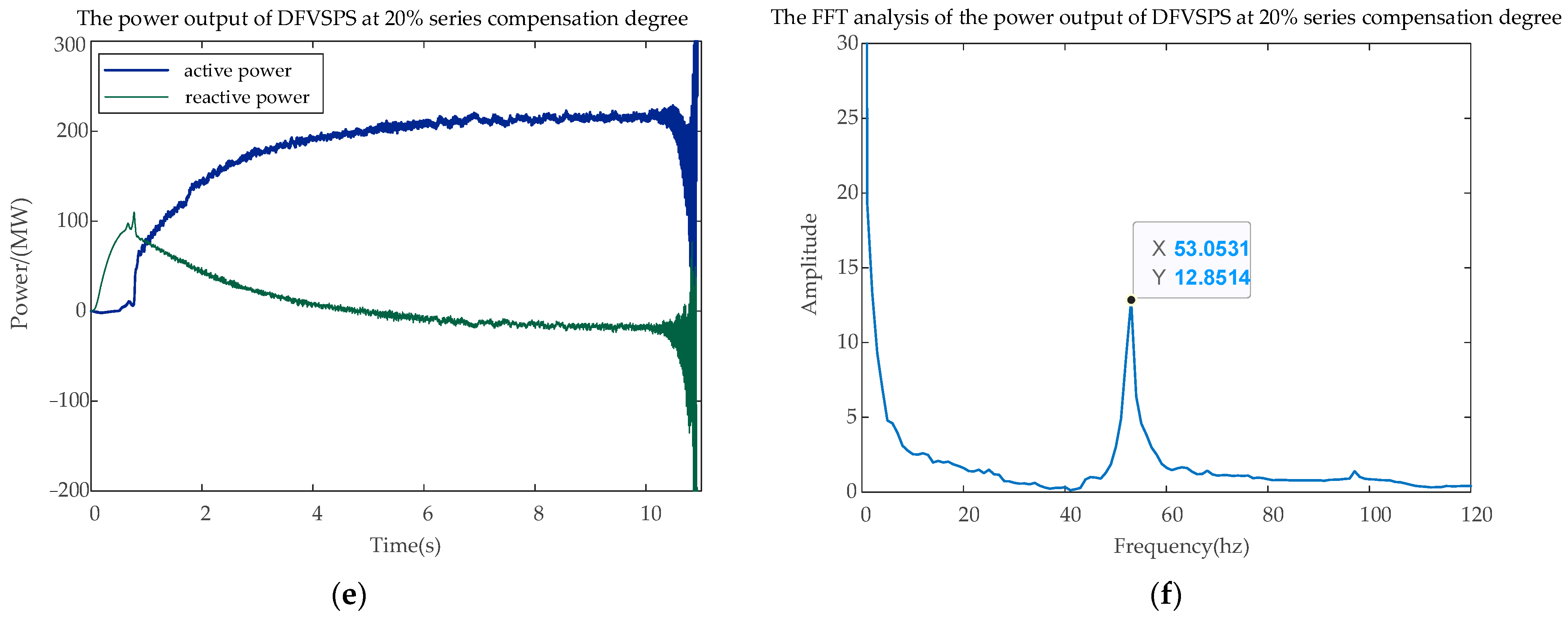
- Under the same control parameters, an increase in the series compensation degree of the transmission line will induce stronger SSOs in the DFVSPS system. Higher compensation levels lead to more intense oscillations. Additionally, the SSO frequency is primarily determined by the actual series compensation degree of the grid. As the compensation degree increases, the natural resonant frequency of the grid under small disturbances increases, resulting in a gradual decrease in the frequency of SSOs.
- (3)
- The SSO modes in the DFVSPS system caused by series-compensated transmission lines are strongly related to electrical parameters and are independent of hydraulic–mechanical parameters. Selecting appropriate rotor-side controller parameters can effectively suppress the system’s SSOs, making them converge and shifting the eigenvalues from the right half-plane to the left half-plane.
- (4)
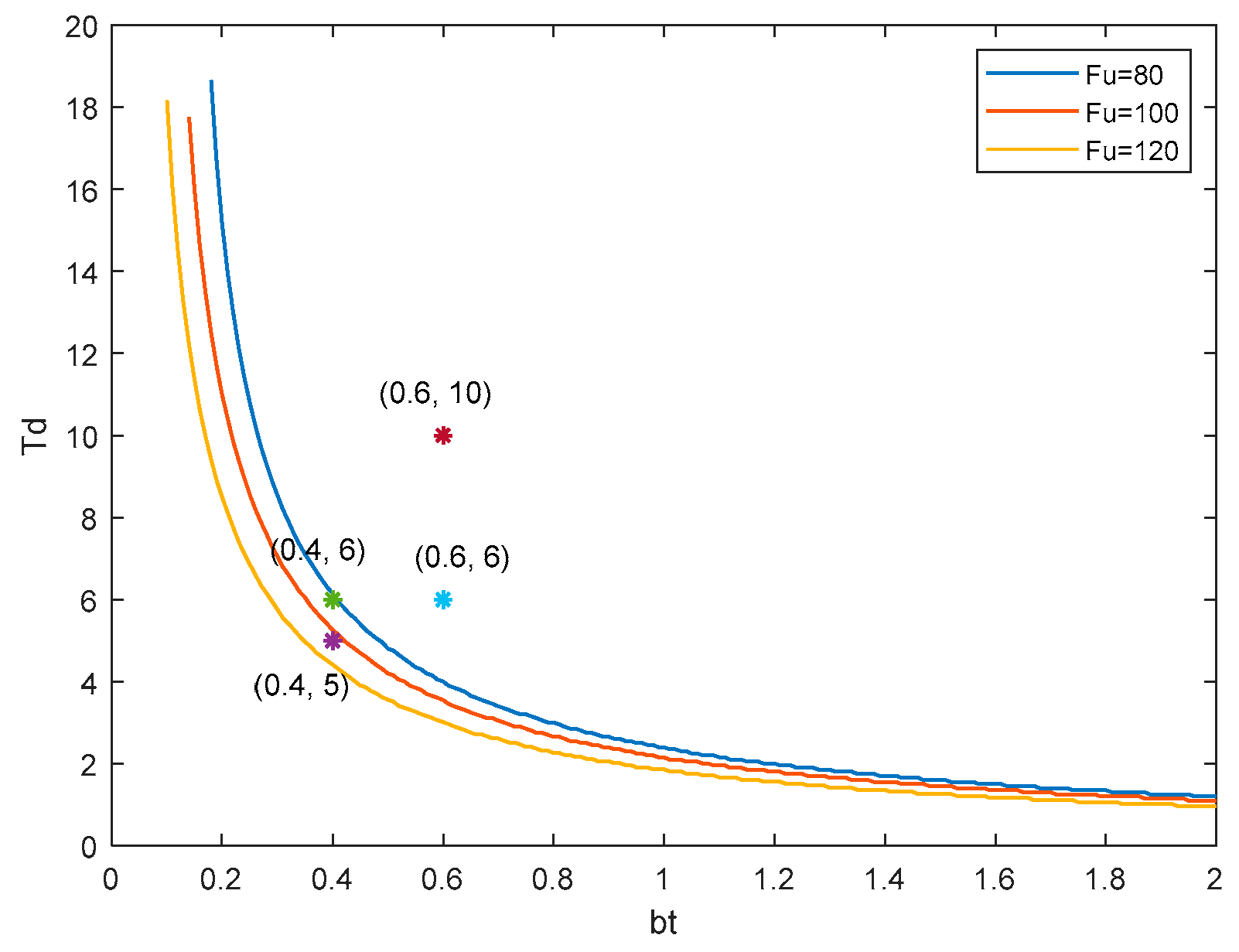
- When the DFVSPS unit with a water conveyance system operates under generation conditions, it exhibits both hydraulic–mechanical coupling and electromechanical decoupling. Therefore, the hydraulic system and the electromechanical system can be analyzed separately. In the hydraulic system, increasing the surge tank area can enhance the stability of the system’s low-frequency oscillation components and expand the stable region for the selection of governor parameters. Increasing the governor parameters allows the system to converge more quickly and become more stable under small disturbances.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Cheng, Y.Z.; Fan, L.L.; Rose, J.; Huang, S.H.; Schmall, J.; Wang, X.Y.; Xie, X.R.; Shair, J.; Ramamurthy, J.R.; Modi, N.; et al. Real-World Subsynchronous Oscillation Events in Power Grids with High Penetrations of Inverter-Based Resources. IEEE Trans. Power Syst. 2023, 38, 316–330. [Google Scholar] [CrossRef]
- Liu, G.; Liu, J.; Liu, A.D. Mitigating sub-synchronous oscillation using intelligent damping control of DFIG based on improved TD3 algorithm with knowledge fusion. Sci. Rep. 2024, 14, 14692. [Google Scholar] [CrossRef]
- Li, Y.; Wu, F.; Li, J.Y.; Yin, Y.W.; Li, Z.Y.; Ai, L. Chance-constrained energy management for pumped storage hydropower plant to compensate for wind power uncertainties. In Proceedings of the 2021 IEEE Power & Energy Society General Meeting (PESGM), Washington, DC, USA, 20 December 2021. [Google Scholar]
- Khurshid, H.; Mohammed, B.S.; Al-Yacouby, A.M.; Liew, M.S.; Zawawi, N. Analysis of hybrid offshore renewable energy sources for power generation: A literature review of hybrid solar, wind, and waves energy systems. Dev. Built Environ. 2024, 19, 100497. [Google Scholar] [CrossRef]
- Cui, R.; Guo, J.; Cheng, L.; Zhang, Y.; Liu, W. Status and Trends Analysis of Global Clean Energies. Acta Geosci. Sin. 2021, 42, 179–186. [Google Scholar]
- Ma, X.; Wu, D.; Wang, D.X.; Huang, B.W.; Desomber, K.; Fu, T.; Weimar, M. Optimizing pumped storage hydropower for multiple grid services. J. Energy Storage 2022, 51, 104440. [Google Scholar] [CrossRef]
- Huang, W.; Li, Y.; Li, J.; Liu, Y.; Wu, F.; Wang, Z. Multi-time scale joint optimal scheduling for wind-photovoltaic-electrochemical energy storage-pumped storage considering renewable energy uncertainty. Electr. Power Autom. Equip. 2023, 43, 91–98. [Google Scholar]
- Papakonstantinou, A.G.; Konstanteas, A.I.; Papathanassiou, S.A. Solutions to Enhance Frequency Regulation in an Island System with Pumped-Hydro Storage under 100% Renewable Energy Penetration. IEEE Access 2023, 11, 76675–76690. [Google Scholar] [CrossRef]
- Han, M.X.; Bitew, G.T.; Mekonnen, S.A.; Yan, W.L. Wind Power Fluctuation Compensation by Variable Speed Pumped Storage Plants in Grid Integrated System: Frequency Spectrum Analysis. CSEE J. Power Energy Syst. 2021, 7, 381–395. [Google Scholar]
- Wang, Z.; Wang, W.; Ma, W.; Chen, Z.; Wu, X.; Tang, F. Real-time Coordinated Control for Cascade Hydro-photovoltaic-pumped Storage Complementary Generation System. Power Syst. Technol. 2021, 45, 871–881. [Google Scholar]
- Xu, B.; Zhu, F.; Zhong, P.A.; Chen, J.; Liu, W.F.; Ma, Y.F.; Guo, L.; Deng, X.L. Identifying long-term effects of using hydropower to complement wind power uncertainty through stochastic programming. Appl. Energy 2019, 253, 113535. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, M.; Peng, Y.M.; Zhou, J.W.; He, R.F. Technology Summary on the Application of Variable-Speed Pump-Turbine Units for Wind Storage Operation. In Proceedings of the 2019 IEEE 3rd International Electrical and Energy Conference (CIEEC), Beijing, China, 7–9 September 2019; pp. 232–235. [Google Scholar]
- Yao, W.W.; Li, W.; Liu, R.K.; Sun, Y. Optimal capacity of variable-speed pumped storage for wind power consumption based on double-layer stochastic programming. J. Renew. Sustain. Energy 2023, 15, 024103. [Google Scholar] [CrossRef]
- Kumar, R.; Kumar, A. Optimal scheduling of variable speed pumped storage, solar and wind energy system. Energy Sources Part A-Recovery Util. Environ. Eff. 2021, 2021, 1–16. [Google Scholar] [CrossRef]
- Deng, Y.W.; Wang, P.F.; Morabito, A.; Feng, W.F.; Mahmud, A.; Chen, D.Y.; Hendrick, P. Dynamic analysis of variable-speed pumped storage plants for mitigating effects of excess wind power generation. Int. J. Electr. Power Energy Syst. 2022, 135, 107453. [Google Scholar] [CrossRef]
- Li, C.S.; Tan, X.Q.; Lu, X.D.; Zhu, Z.W.; Xu, R.L.; Liu, X.B.; Wang, Z.W. Multi-timescale analysis and quantification of dynamic regulation characteristics of DFIM-based variable-speed pumped storage units in alleviating wind power fluctuations. J. Energy Storage 2024, 88, 111482. [Google Scholar]
- Iliev, I.; Trivedi, C.; Dahlhaug, O.G. Variable-speed operation of Francis turbines: A review of the perspectives and challenges. Renew. Sustain. Energy Rev. 2019, 103, 109–121. [Google Scholar] [CrossRef]
- Jing, H.; Li, J.; Zhao, H.; Xu, Q.; Yao, W.; Wang, B. Modeling and Simulation of Operating Condition Conversion of Doubly-Fed Variable Speed Pumped Storage. Electr. Power Constr. 2023, 44, 41–50. [Google Scholar]
- Pan, P.Y.; Chen, G.; Shi, H.B.; Zha, X.M.; Huang, Z.Q. Distributed Robust Optimization Method for Active Distribution Network with Variable-Speed Pumped Storage. Electronics 2024, 13, 3317. [Google Scholar] [CrossRef]
- Liu, K.; Zhu, S.; Feng, X.; Deng, C.; Chen, M.; Li, D. Electromechanical Transient Modeling and Model Predictive Control of Doubly-fed Variable- speed Pumped Storage Power Plant. High Volt. Eng. 2020, 46, 2407–2417. [Google Scholar]
- Zhao, G.P.; Ren, J.Y. Research on an Output Power Model of a Doubly-Fed Variable-Speed Pumped Storage Unit with Switching Process. Appl. Sci. 2019, 9, 3368. [Google Scholar] [CrossRef]
- Hu, J.M.; Tao, D.J.; Sun, Y.T.; Zhang, C.L.; Li, G.F.; Hu, G. Analysis of Operating Characteristics of Variable Speed Pumped Storage Motor-Generator. IEEE Access 2023, 11, 52117–52128. [Google Scholar]
- Chen, Y.H.; Xu, W.; Liu, Y.; Bao, Z.; Mao, Z.X.; Rashad, E.M. Modeling and Transient Response Analysis of Doubly-Fed Variable Speed Pumped Storage Unit in Pumping Mode. IEEE Trans. Ind. Electron. 2023, 70, 9935–9947. [Google Scholar] [CrossRef]
- Chen, Y.; Deng, C.; Liu, Y.; Xu, Z.; Li, D.; Chen, M.; Peng, P. Electromechanical Transient Modelling and Active Power-frequency Coupling Characteristics of Doubly-fed Variable Speed Pumped Storage under Pumping Mode. Proc. Chin. Soc. Electr. Eng. 2022, 42, 942–956. [Google Scholar]
- Wang, X.; Han, M.; Girmaw, T.B. Reactive Power Characteristic Analysis of Doubly-fed Adjustable-speed Pumped Storage Unit. Power Syst. Technol. 2019, 43, 2918–2925. [Google Scholar]
- Li, G.H.; Zhang, J.; Wu, X.M.; Yu, X.D. Small-Signal Stability and Dynamic Behaviors of a Hydropower Plant with an Upstream Surge Tank Using Different PID Parameters. IEEE Access 2021, 9, 104837–104845. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, X.D.; Guo, X.L.; Zhao, W.L.; Chen, S. Operational Stability of Hydropower Plant with Upstream and Downstream Surge Chambers during Small Load Disturbance. Energies 2023, 16, 4517. [Google Scholar] [CrossRef]
- Xu, B.B.; Zhang, J.J.; Egusquiza, M.; Chen, D.Y.; Li, F.; Behrens, P.; Egusquiza, E. A review of dynamic models and stability analysis for a hydro-turbine governing system. Renew. Sustain. Energy Rev. 2021, 144, 110880. [Google Scholar] [CrossRef]
- Wang, F.Z.; Zhu, S.; Liu, K.P.; Chen, M.; Du, Y.X. Impedance modeling of wind turbine-variable speed pumped storage combined operation system. Energy Rep. 2021, 7, 470–478. [Google Scholar] [CrossRef]
- YHuang, F.; Yang, W.J.; Zhao, Z.G.; Han, W.F.; Li, Y.L.; Yang, J.D. Dynamic modeling and favorable speed command of variable-speed pumped-storage unit during power regulation. Renew. Energy 2023, 206, 769–783. [Google Scholar]
- Wang, F.; Tan, T.; Liu, K.; Zhu, S.; Yang, J.; Li, Y.; Hu, C.; Qin, L. Small-signal stability analysis of combined operation system of variable-speed pumped storage unit and direct-drive wind turbine unit. Electr. Power Autom. Equip. 2021, 41, 65–72. [Google Scholar]
- Wu, Y.F.; Liu, J.F.; Zhou, J. The Strategy of Considering the Participation of Doubly-Fed Pumped-Storage Units in Power Grid Frequency Regulation. Energies 2022, 15, 2179. [Google Scholar] [CrossRef]
- Gao, C.Y.; Yu, X.Y.; Nan, H.P.; Men, C.S.; Zhao, P.Y.; Cai, Q.S.; Fu, J.N. Stability and dynamic analysis of doubly-fed variable speed pump turbine governing system based on Hopf bifurcation theory. Renew. Energy 2021, 175, 568–579. [Google Scholar] [CrossRef]
- Zhang, N.; Xue, X.M.; Sun, N.; Gu, Y.H.; Jiang, W.; Li, C.S. Nonlinear Modeling and Stability of a Doubly-Fed Variable Speed Pumped Storage Power Station with Surge Tank Considering Nonlinear Pump Turbine Characteristics. Energies 2022, 15, 4131. [Google Scholar] [CrossRef]
- Fan, L.L.; Kavasseri, R.; Miao, Z.L.; Zhu, C.X. Modeling of DFIG-Based Wind Farms for SSR Analysis. IEEE Trans. Power Deliv. 2010, 25, 2073–2082. [Google Scholar] [CrossRef]
- Liang, J.Q.; Harley, R.G. Pumped Storage Hydro-Plant Models for System Transient and Long-Term Dynamic Studies. In Proceedings of the IEEE Power and Energy Society General Meeting PESGM, Minneapolis, MN, USA, 25–29 July 2010. [Google Scholar]
- Yu, X.D.; Yang, X.W.; Liu, Z.; Zhang, J. Mechanism and quantified criteria of stability characteristics of hydropower plants with surge tanks during regulation. Int. J. Electr. Power Energy Syst. 2020, 122, 106160. [Google Scholar] [CrossRef]
- Liu, Z.; Yu, X.D.; Pérez-Díaz, J.I.; Liu, Y.; Martínez-Lucas, G. Influence of water hammer effect on low frequency oscillation of grid-connected hydropower station system. Renew. Energy 2023, 219, 119530. [Google Scholar] [CrossRef]
- Zhao, G.P.; Zhang, Y.X.; Ren, J.Y. Analysis of Control Characteristics and Design of Control System Based on Internal Parameters in Doubly Fed Variable-Speed Pumped Storage Unit. Complexity 2021, 2021, 6697311. [Google Scholar] [CrossRef]
- Shi, L.J.; Lao, W.J.; Wu, F.; Lee, K.Y.; Li, Y.; Lin, K.M. DDPG-based load frequency control for power systems with renewable energy by DFIM pumped storage hydro unit. Renew. Energy 2023, 218, 119274. [Google Scholar] [CrossRef]
- Shi, L.J.; Lao, W.J.; Wu, F.; Zheng, T.; Lee, K.Y. Frequency Regulation Control and Parameter Optimization of Doubly-Fed Induction Machine Pumped Storage Hydro Unit. IEEE Access 2022, 10, 102586–102598. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 8% | 12% | 20% | |
|---|---|---|---|
| −5.62 403.72i | −6.37 411.31i | −7.19 419.74i | |
| −0.66 347.99i | 0.06 340.00i | 0.89 330.98i | |
| −56.81 117.77i | −56.92 118.71i | −57.08 120.05i | |
| −0.01 0.05i | −0.01 0.05i | −0.01 0.05i |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Wu, F.; Shi, L.; Li, Y.; Guo, X.; Qi, P. Analysis and Suppression of Oscillations in Doubly Fed Variable Speed Pumped Storage Hydropower Plants Considering the Water Conveyance System. Sustainability 2024, 16, 8715. https://doi.org/10.3390/su16198715
Chen Y, Wu F, Shi L, Li Y, Guo X, Qi P. Analysis and Suppression of Oscillations in Doubly Fed Variable Speed Pumped Storage Hydropower Plants Considering the Water Conveyance System. Sustainability. 2024; 16(19):8715. https://doi.org/10.3390/su16198715
Chicago/Turabian StyleChen, Yuzhe, Feng Wu, Linjun Shi, Yang Li, Xu Guo, and Peng Qi. 2024. "Analysis and Suppression of Oscillations in Doubly Fed Variable Speed Pumped Storage Hydropower Plants Considering the Water Conveyance System" Sustainability 16, no. 19: 8715. https://doi.org/10.3390/su16198715
APA StyleChen, Y., Wu, F., Shi, L., Li, Y., Guo, X., & Qi, P. (2024). Analysis and Suppression of Oscillations in Doubly Fed Variable Speed Pumped Storage Hydropower Plants Considering the Water Conveyance System. Sustainability, 16(19), 8715. https://doi.org/10.3390/su16198715