
Assessing Impact Factors That Affect School Mobility Utilizing a Machine Learning Approach

 , , ,
, , ,
Abstract
:1. Introduction
1.1. Rationale
1.2. Research Objectives
- (a)
- Development of a solid literature review that: (i) identifies various parameters (observed variables) related to parental behavior characteristics affecting the school travel mode choice process and (ii) presents and describes AI classification applications that have proved their ability in forecasting human behavior characteristics.
- (b)
- Capitalization of research findings from EFA and CFA outcomes from previous research works (by some of the authors of the present paper), with a specific focus on the derived grouped parameters (labeled factors) that exhibiting homogeneous characteristics and interpretive properties in the school travel mode choice process, and aligning these findings with the research scope outlined in (c) to employ ML classification techniques.
- (c)
- Investigation, using ML classification techniques, into the contribution of each labeled factor to the parental school travel mode choice process and identification of factors with the greatest influence on the decision between motorized and non-motorized school travel mode choices.
1.3. Literature Review
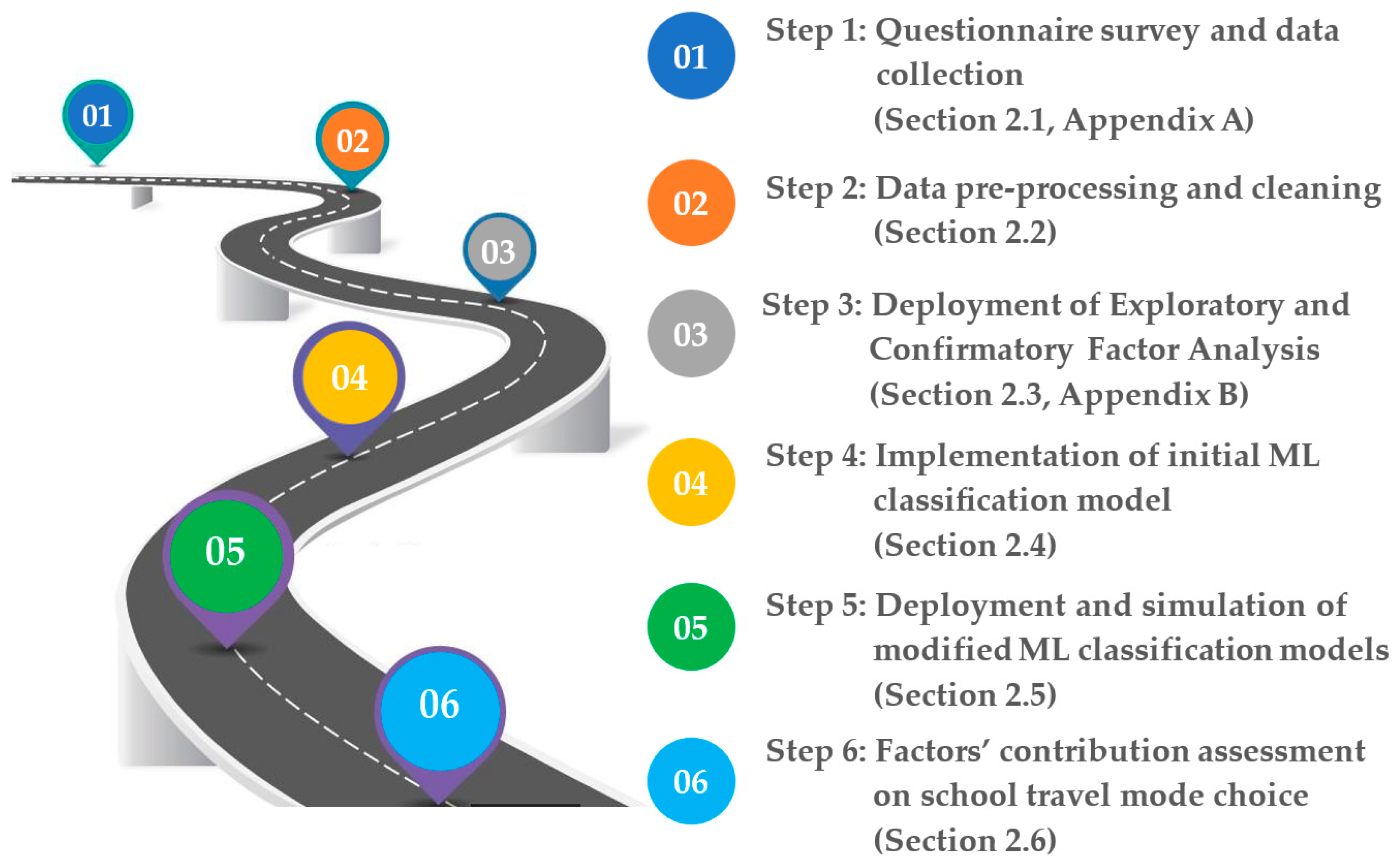
2. Methodology and Experimentation
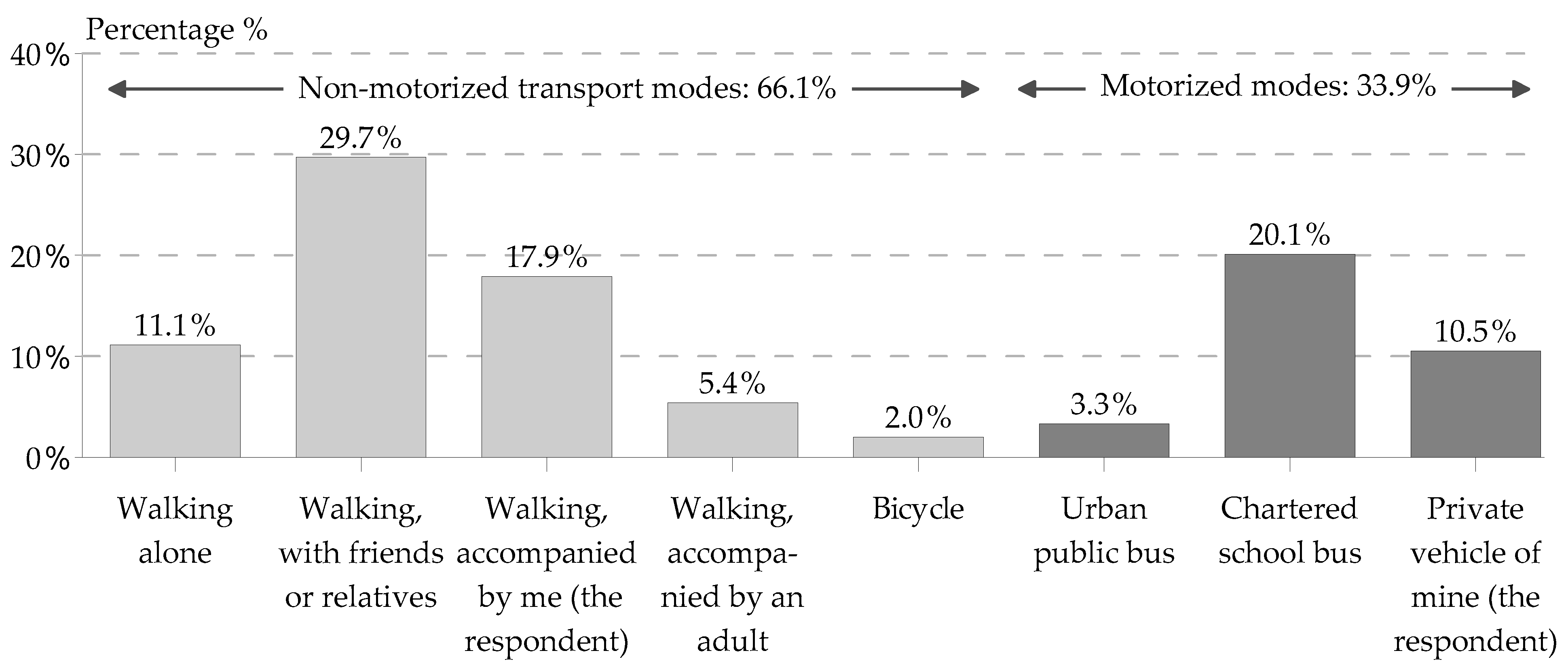
2.1. Questionnaire Survey and Data Collection
2.2. Data Pre-Process and Cleaning
2.3. Results of Exploratory and Confirmatory Factor Analysis
- Factor MOTMODE (mean value in 5-point Likert scale: 3.84, the qualitative interpretation of factors’ mean values refers to the last column of the Table A2, Appendix B) covers some objective parameters of parental motivation to choose a transport mode (student safety and convenience, travel time and distance between residence and school unit, student age, working hours of parents, and the possibility for someone else, other than the respondent parent, to assist with school transportation).
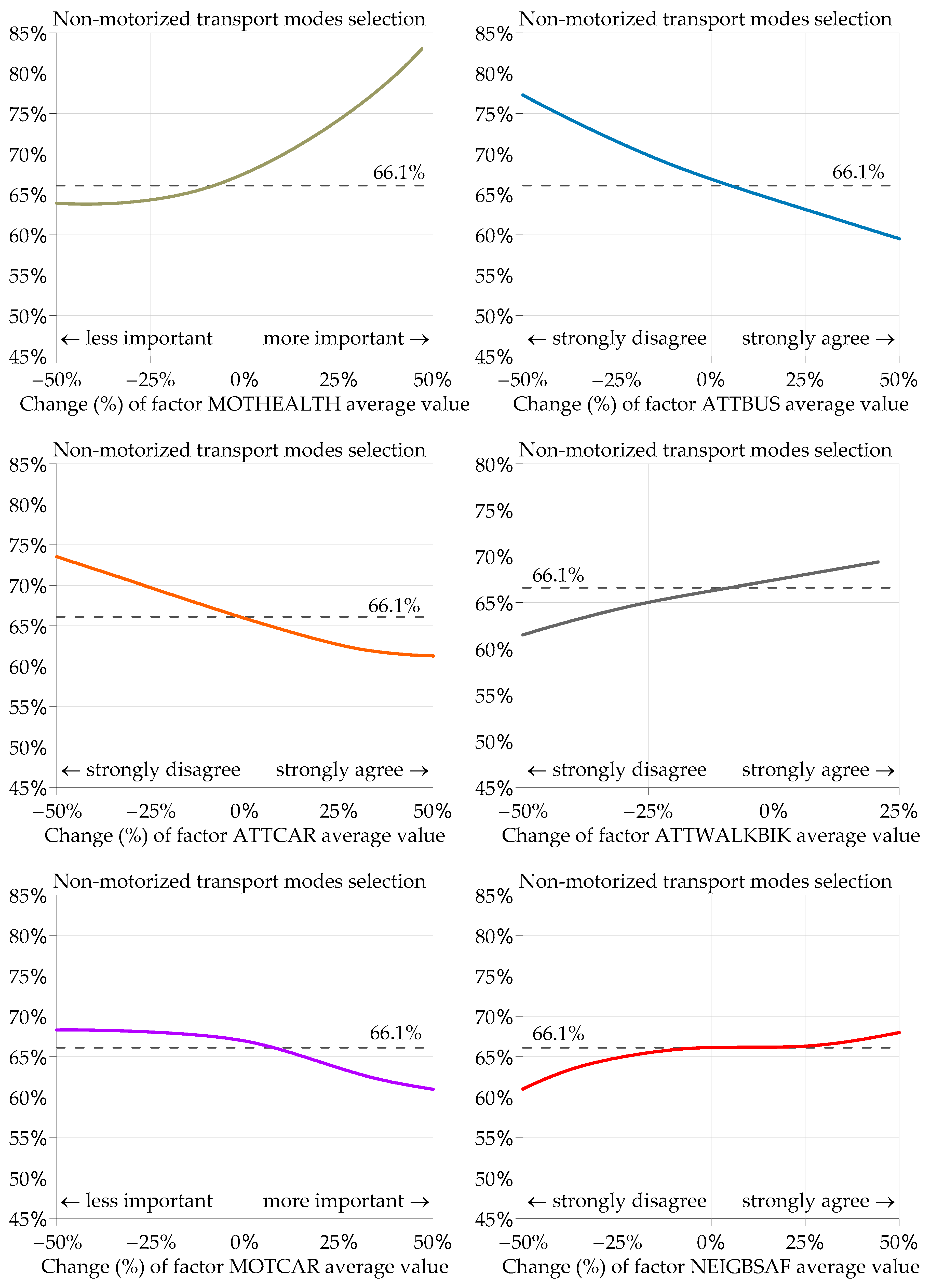
- Factor MOTHEALTH (mean value: 3.39) includes the parameters of parental motivation to choose a transport mode related to the physical and mental health of a student. A possible increase in the significance that parents attach to the specific parameters is expected to further increase the use of alternative transport modes such as bicycle and walking.
- Factor ATTBUS (mean value: 2.26) involves the parameters related to the parents’ perception regarding the use of public buses. In case of increasing the level of agreement parents declare in the statements (parameters composing this factor), a reduction in the use of walking and bicycling in favor of a public bus is expected to be noticed.
- Factor ATTCAR (mean value: 3.06) contains the parameters related to the parents’ perception regarding the use of a private vehicle. The increase in the level of agreement parents declare for these statements is estimated to reduce the use of walking and bicycling in favor of motorized transport modes.
- Factor ATTWALKBIKE (mean value: 4.14) includes the parameters related to the parents’ perception regarding the use of non-motorized transport modes such as walking and bicycle. In case of increasing the level of agreement in the specific parameters that compose this factor, it is estimated that parents will prefer their children to walk or bike to school, in a larger degree, since they have already shaped a positive attitude towards the use of non-motorized transport modes.
- Factor MOTCAR (mean value: 3.07) consists of parameters related to the possibility of using a private vehicle. An increase in the level of significance that parents attribute to the specific parameters is expected to cause a negative attitude towards the use of non-motorized transport modes.
- Factor NEIGBSAF (mean value: 3.29) encompasses parameters associated with the perceived level of security within the neighborhoods along the route connecting students’ residences and the school units. Increasing the level of security sense parents perceive regarding the neighborhood students cross on their trip from the school unit to their residence and vice versa is expected to act in favor of walking and bicycling in their final mode choice.
- Factor ROUTESAF (mean value: 2.30) contains the parameters related to safety perception facilitated by the sidewalks and the whole path the student follows. An increase in the level of agreement parents declare for these statements representing the specific parameters is expected to also increase the use of non-motorized transport modes, as these parameters characterize an integrated and well-organized (in terms of infrastructure) built environment shaped to act in favor of walking and bicycling.
- Finally, factor MODE comprises the actual and preferable parental mode choice regarding the school transportation.
- Can AI classification techniques, by using parents’ responses to various questions (composing the observed variables) in the survey, predict the parental choices regarding motorized and non-motorized school transportation and to what level of accuracy?
- Which of the two factors (NEIGBSAF and ROUTESAF), which can directly (short and medium term) be influenced by state or/and municipal authorities through improvement and rehabilitation projects, has the greatest influence on encouraging non-motorized school transportation?
- Which of the five factors (MOTHEALTH, ATTBUS, ATTCAR, ATTWALKBIKE, and MOTCAR) related to parental perceptions and beliefs, which can only indirectly (along term) be influenced by the state (through information and awareness-raising campaigns, incentives provision, etc.), has the greatest impact on encouraging non-motorized school travel?
2.4. Implement of the ML Classification Model
2.4.1. Selection of Classification Algorithm
- -
- Logistic Regression (LR) [55]: a classification algorithm that employs a linear function that is formulated by aggregating weighted input data features. The main objective is to optimize these feature weights, so that a predefined cost function (such as mean squared error) is minimized.
- -
- Support Vector Classifier (SVC) [56]: a model whose primary goal is to find the optimal separating hyperplane to distinguish among different classes, specifically the one that maximizes the margin or distance from the hyperplane to the nearest data points of each class.
- -
- Decision Trees (DT) [57]: a tree-based classification method. The DT construction involves two main processes: tree building, which progressively splits records based on certain criteria, and tree pruning to control tree complexity by reducing the number of leaf nodes.
- -
- K-Nearest Neighbor (KNN) [58]: an approach according to which test instances are classified by measuring their similarity/distance to training instances, typically using similarity or distance metrics such as Euclidean distance and cosine similarity. The KNN is then determined based on their proximity to the test instance and the class of the test instance is assigned based on majority voting among these K-neighbors.
- -
- Random Forest (RF) [59]: an ensemble learning method that fits multiple deep decision trees to different subsamples of a given dataset. The predictions of these decision trees are then combined to improve the overall performance and avoid overfitting.
- -
- Gradient Boosting (GB) [60]: a stagewise additive model where an ensemble of prediction models is built by incrementally adding weak learners. The goal is to minimize the loss of the ensemble by employing a gradient-descent-like optimization procedure that adjusts the predictions of each weak learner in the ensemble to reduce loss.
- -
- Extreme Gradient Boosting (XGB) [61]: a classification method that constructs an ensemble of decision trees, training them sequentially. It calculates the gradient of the loss function to determine how the model’s parameters should be adjusted to reduce errors. As a result, each new tree corrects the errors of the previous ones.
2.4.2. ML Classification Model Training and Testing
2.5. Deployment and Simulation of Modified ML Classification Models
- i.
- The factor under assessment was selected, e.g., factor ROUTESAF.
- ii.
- The questionnaire parameters (observed variables) that compose the ROUTESAF factor were isolated. In this case, questions Q18-1, Q18-2, Q18-3, Q18-4, Q18-6, Q18-7, Q18-8, Q18-9, and Q18-12 (see Appendix A).
- iii.
- A process of increasing (and also decreasing on a next step) the initial degrees of agreement/disagreement of the participants in the questionnaire survey regarding statements Q18-1, Q18-2, Q18-3, Q18-4, Q18-6, Q18-7, Q18-8, Q18-9, and Q18-12 was initiated. During the increase in the degree of agreement, respondents with the lowest degree of agreement in each statement were identified and the increase process started from there. Thus, responses such as “Strongly disagree” were initially transformed into “Disagree”, and when these were completed, “Disagree” was then transformed into “Undecided” and so on. Similarly, during the decrease in the degree of agreement, respondents with the highest degrees of agreement (“Strongly agree” and “Agree”) in each statement were identified and the process of decreasing degrees of agreement started also from there.
- iv.
- For the new mean value corresponding to the factor ROUTESAF, after the modification of the previous step, the top-performing classification model was applied to predict the new percentage of non-motorized school transport modes based on the modified mean value of the factor.
- v.
- This process identified several pairs of values (mean value of the ROUTESAF factor, percentage of non-motorized school transport modes). Figure 5 illustrates the change in the percentage of non-motorized school transport modes based on the change in the initial degrees of agreement/disagreement of the parents participating in the questionnaire survey regarding statements of this specific factor.
- vi.
- All responses were then reset to the initial values, as recorded in the questionnaire survey, another factor was selected, and the process repeated from the beginning.

2.6. Factor Contribution Assessment for School Travel Mode Choice
3. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research On School Transport | |||||
|---|---|---|---|---|---|
| (The survey is addressed to parents of students aged 6–18 years) | |||||
| Q1. Gender: | ☐ Man | ☐ Woman | |||
| Q2. Age category: | ☐ 24–29 | ☐ 30–39 | ☐ 40–49 ☐ | ☐ 50–59 | ☐ 60–64 |
| Q3. Family status: | ☐ Married/in cohabitation | ☐ Divorced | |||
| Q4. Educational level: | ☐ Elementary School | ☐ High School | ☐ University Degree | ☐ M.Sc./Ph.D. ☐ | |
| Q5. Work status: | ☐ Full time | ☐ Part time | ☐ Unemployed | ||
| ☐ Unpaid (household) | ☐ University Student | ☐ Retired | |||
| Q6. Driver license possession: | ☐ At least one parent | ☐ Both parents | ☐ None | ||
| Q7. Number of private vehicles in the family: | ☐ 0 | ☐ 1 | ☐ 2 | ☐ 3 or more | |
| Q8. Student’s age: ___ years old | |||||
| Q9. Students’ gender: | ☐ Boy | ☐ Girl | |||
| Q10. Please write down the student’s school unit: ____________________________________________ | |||||
| Q11. The school unit is located in: | ☐ Urban environment | ☐ Rural environment | |||
| Q12. What is the approximate distance of your residence to the school unit? | |||||
| ☐ up to 0.5 km | ☐ 1.0–1.5 km | ☐ 1.5–2.0 km | ☐ 2.0–2.5 km | ☐ 2.5–3.0 km | |
| Q13. Has your child ever expressed the desire to travel to school by bicycle? | ☐ Yes | ☐No | |||
| Q14. I would allow my child to walk or cycle to and from school alone without any parent accompanying them: | |||||
| ☐ Totally agree | ☐ Agree | ☐ Neither agree or disagree | ☐ Disagree | ☐ Totally disagree | |
| Q15. What transport mode does your child uses from residence to school unit and from school unit to residence. If there is a difference in the transport modes due to summer or winter, please note the predominant one: | |||||
| Q15-1. Residence → School unit | Q15-2. School unit → Residence | ||||
| Walking alone | ☐ | ☐ | |||
| Walking, with friends | ☐ | ☐ | |||
| Walking, accompanied by the respondent | ☐ | ☐ | |||
| Walking, accompanied by an adult | ☐ | ☐ | |||
| Urban public bus | ☐ | ☐ | |||
| School bus, paid by school | ☐ | ☐ | |||
| I drive him/her to school | ☐ | ☐ | |||
| A friend of mine drives him/her to school | ☐ | ☐ | |||
| Taxi | ☐ | ☐ | |||
| Bicycle | ☐ | ☐ | |||
| Q16. What transport mode would you prefer for your child to use from residence to school unit and from school unit to residence: | |||||
| Walking alone | ☐ | ||||
| Walking, with friends | ☐ | ||||
| Walking, accompanied by the respondent | ☐ | ||||
| Walking, accompanied by an adult | ☐ | ||||
| Urban public bus | ☐ | ||||
| School bus, paid by school | ☐ | ||||
| I drive him/her to school | ☐ | ||||
| A friend of mine drives him/her to school | ☐ | ||||
| Taxi | ☐ | ||||
| Bicycle | ☐ | ||||
| Q17. According to your opinion which is the level of importance for each of the following factors that prompt you to select the specific transport mode? | |||||
| Not important at all | Absolutely important | ||||
| [1] | [2] | [3] | [4] | [5] | |
| Q17-1. Student gender | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-2. Student age | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-3. There is someone to assist me with school transportation | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-4. Working hours | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-5. Personal/family income | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-6. Driving license possession | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-7. Car ownership | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-8. Limitations on parking | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-9. Distance from school | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-10. Time spent on trip | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-11. Trip cost | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-12. Student’s comfort | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-13. Student’s safety | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-14. Environmental sensitivities | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-15. Student’s health | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-16. School luggage weight | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-17. Socializing with friends | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q17-18. Spend quality time with child | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18. In what degree to you agree or disagree with the below statements regarding the student’s school trip? | |||||
| Strongly disagree | Strongly agree | ||||
| [1] | [2] | [3] | [4] | [5] | |
| Q18-1. Traffic conditions are not dangerous | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-2. I believe there are safe intersections | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-3. I find it unlikely my child to be abducted or injured by a stranger | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-4. I find it unlikely my child to be harassed by others | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-5. The route from residence to school is safe | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-6. There are sidewalks of adequate width | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-7. Sidewalks are clean | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-8. Sidewalks are separated by traffic with trees | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-9. There are no obstacles on sidewalks (rubbish bins, parked cars, etc.) | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-10. Residents in the neighborhood are in good condition | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-11. There are no vandalism traces in our neighborhood | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-12. There is adequate lighting on the route from residence to school unit | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q18-13. The existing infrastructures cannot protect a cyclist | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19. In what degree to you agree or disagree with the below statements regarding the student’s school trip? | |||||
| Strongly disagree | Strongly agree | ||||
| [1] | [2] | [3] | [4] | [5] | |
| Q19-1. Travelling to school on foot/bike is a good way my child to become familiar with the neighborhood | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-2. I would like my child to travel to school on foot or by bike under the appropriate circumstances | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-3. Travelling to school on foot or by bike is a way to increase my child’s physical activity | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-4. Driving my child to school may lead to car use addiction | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-5. Driving to school contributes to driving congestion | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-6. Driving is more comfortable than walking/cycling | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-7. I like driving within the city | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-8. Owning a car makes my life more comfortable | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-9. I use my car even for short distances | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-10. Car ownership is a prestige symbol | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-11. Traffic congestion doesn’t bother me | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-12. I like to use the urban bus for travelling within the city | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-13. The urban bus is a very reliable transport mode | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-14. I am satisfied with the comfort of the urban bus | ☐ | ☐ | ☐ | ☐ | ☐ |
| Q19-15. I am satisfied with the time consistency of the urban bus services | ☐ | ☐ | ☐ | ☐ | ☐ |
Appendix B
| Questionnaire Parameters (Observed Variables) | Labeled Factors (Latent Variables) | |||
|---|---|---|---|---|
| No | Description | Mean Value (Standard Deviation) in 5-Point Likert Scale | Acronym and Description (in Parenthesis the Reliability Coefficient Cronbach’s Alpha) | Mean Value in 5-Point Likert Scale |
| Q17-2 | Importance of student age | 4.06 (1.13) | MOTMODE (0.88): Objective parameters of parental motivation to choose a transport mode | 3.84 (1: Not important at all, 5: Absolutely important) |
| Q17-3 | There is someone to help | 3.45 (1.31) | ||
| Q17-4 | Working hours | 3.74 (1.26) | ||
| Q17-9 | Distance residence → school | 3.96 (1.14) | ||
| Q17-10 | Travel time residence → school | 3.75 (1.16) | ||
| Q17-12 | Convenience | 3.69 (1.17) | ||
| Q17-13 | Student’s safety | 4.21 (1.18) | ||
| Q17-14 | Environmental sensitivities | 3.12 (1.18) | MOTHEALTH (0.88): Parameters of parental motivation to choose a transport mode related to the physical and mental health of a student | 3.39 (1: Not important at all, 5: Absolutely important) |
| Q17-15 | Student’s health | 3.57 (1.23) | ||
| Q17-16 | School luggage weight | 3.62 (1.24) | ||
| Q17-17 | Socialization with friends | 3.54 (1.20) | ||
| Q17-18 | Quality time between parent and child | 3.09 (1.20) | ||
| Q19-12 | I like travelling by urban bus within the city | 2.64 (1.16) | ATTBUS (0.82): Parents perception regarding the use of public buses | 2.26 (1: Strongly disagree, 5: Strongly agree) |
| Q19-13 | Urban bus is a reliable transport mode | 2.37 (1.11) | ||
| Q19-14 | Satisfied with the comfort of urban bus services | 2.01 (1.08) | ||
| Q19-15 | Satisfied with time reliability with urban bus services | 2.00 (1.12) | ||
| Q15-1, 2 | Transport mode, residence → school and vice-versa | Not applicable | MODE (0.86): Selected and preferred school travel mode choice | Not applicable |
| Q16 | Preferable transport mode | |||
| Q19-6 | Driving is more comfortable than walking or bicycling | 2.81 (1.12) | ATTCAR (0.87): Parents perception regarding the use of private vehicles | 3.06 (1: Strongly disagree, 5: Strongly agree) |
| Q19-7 | I like driving within the city | 2.83 (1.16) | ||
| Q19-8 | Owing a car makes my life comfortable | 3.76 (0.93) | ||
| Q19-9 | I use my car for all trips within the city | 2.85 (1.18) | ||
| Q19-1 | Walking or bicycling to school is a good way my child be familiar with environment | 3.89 (0.79) | ATTWALKBIK (0.72): Parents perception regarding the use of non-motorized transport modes (walking, bicycle, etc.) | 4.14 (1: Strongly disagree, 5: Strongly agree) |
| Q19-2 | I would prefer my child walk or drive to school under different circumstances | 4.27 (0.77) | ||
| Q19-3 | Walking or cycling to school increases students’ physical activity | 4.25 (0.70) | ||
| Q17-6 | Driving license possession | 3.04 (1.33) | MOTCAR (0.95): Parameters related to the usability of private vehicles | 3.07 (1: Not important at all, 5: Absolutely important) |
| Q17-7 | Car ownership | 3.12 (1.34) | ||
| Q17-8 | There are no parking limitations outside my residence or the school unit | 3.06 (1.30) | ||
| Q18-5 | The neighborhood the student travels is safe | 2.88 (1.08) | NEIGBSAF (0.76): Parameters related to the sense of security provided by the neighborhood | 3.29 (1: Strongly disagree, 5: Strongly agree) |
| Q18-10 | Residences of neighborhood are in good conditions | 3.35 (1.12) | ||
| Q18-11 | There are no vandalism traces in the neighborhood | 3.23 (1.05) | ||
| Q18-1 | Traffic conditions are not dangerous for the students | 2.18 (1.10) | ROUTESAF (0.91): Parameters related to the sense of safety provided by the sidewalks and the whole path the student follows | 2.30 (1: Strongly disagree, 5: Strongly agree) |
| Q18-2 | Crossings are safe | 2.27 (1.15) | ||
| Q18-3 | It’s unlikely for my child to be injured or abducted by | 2.27(1.11) | ||
| Q18-4 | It’s unlikely for my child to be harassed by others | 2.23 (1.07) | ||
| Q18-6 | Sidewalks have sufficient width | 2.25 (1.17) | ||
| Q18-7 | Sidewalks are clean | 2.32 (1.15) | ||
| Q18-8 | Sidewalks are separated from traffic with trees | 2.07 (1.10) | ||
| Q18-9 | There are no obstacles in the sidewalks | 2.15 (1.14) | ||
| Q18-12 | There is adequate lighting in the school trip route | 2.95 (1.17) | ||
References
- Kotoula, K.; Botzoris, G. Decoding Behavioral Norms in School Mobility: A Structural Equation Modelling Analysis. WSEAS Trans. Syst. 2023, 22, 520–531. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, Z. Travel Mode Choice Prediction Using Deep Neural Networks with Entity Embeddings. IEEE Access 2020, 8, 64959–64970. [Google Scholar] [CrossRef]
- Lam, H.Y.; Jayasinghe, S.; Ahuja, K.D.; Hills, A.P. Active school commuting in school children: A narrative review of current evidence and future research implications. Int. J. Environ. Res. Public Health 2023, 20, 6929. [Google Scholar] [CrossRef] [PubMed]
- Kerr, J.; Rosenberg, D.; Sallis, J.; Saelens, B.; Frank, L.; Conway, T. Active commuting to school: Associations with environment and parental concerns. Med. Sci. Sports Exerc. 2006, 38, 787–794. [Google Scholar] [CrossRef] [PubMed]
- Sheiner, J. School trips in Germany: Gendered escorting practices. Transp. Res. Part A Policy Pract. 2016, 94, 76–92. [Google Scholar] [CrossRef]
- Noland, R.; Park, H.; Von Hagen, L.A.; Chatman, D. A mode choice analysis of School trips in New Jersey. In Proceedings of the 89th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 10–14 January 2010. [Google Scholar]
- Seraj, S.; Sidharthan, R.; Bhat, C.; Pendyala, R.; Goulias, R. Parental attitudes towards children walking and bicycling to school: A multivariate ordered response analysis. In Proceedings of the 91st Annual Meeting of the Transportation Research Board, Washington, DC, USA, 22–26 January 2012. [Google Scholar]
- Yang, Y.; Markowitz, E. Integrating Parental attitudes in research on children’s active school commuting: Evidence from a community school travel survey. J. Transp. Res. Board 2012, 2318, 116–127. [Google Scholar] [CrossRef]
- Donald, N. Children’s Travel: Patterns and Influences; University of California: Berkeley, CA, USA, 2005. [Google Scholar]
- Zwerts, E.; Wets, G. Children’s travel behavior a world of difference. In Proceedings of the 85th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 22–26 January 2006. [Google Scholar]
- O’Brien, M.; Jones, D.; Sloan, D.; Rustin, M. Children’s independent spatial mobility in the urban public realm. Childhood 2000, 7, 257–277. [Google Scholar] [CrossRef]
- Evenson, K.; Huston, S.; McMillen, B.; Bors, P.; Ward, D. Statewide prevalence and correlates of walking and bicycling to school. Arch. Pediatr. Adolesc. Med. 2003, 157, 887–892. [Google Scholar] [CrossRef]
- DiGuiseppi, C.; Roberts, I.; Li, L. Determinants of car travel on daily journeys to school: Cross sectional survey of primary school children. Br. Med. J. 1998, 316, 1426–1428. [Google Scholar] [CrossRef]
- Ermagun, A.; Samimi, A. Active transportation mode choice behavior across genders in school trips. In Proceedings of the 91st Annual Meeting of the Transportation Research Board, Washington, DC, USA, 22–26 January 2012. [Google Scholar]
- Mitra, R.; Buliung, R.N. Intra-household travel interactions, the built environment and school travel mode choice: An exploration using spatial models. In Proceedings of the 91st Annual Meeting, Transportation Research Board, Washington, DC, USA, 22–26 January 2012. [Google Scholar]
- Copperman, R.B.; Bhat, C.R. An analysis of the determinants of children’s weekend physical activity participation. Transportation 2007, 34, 67–87. [Google Scholar] [CrossRef]
- Mackett, R.L. Letting children be free to walk. In Proceedings of the 12th Annual Conference on Walking and Liveable Cities (WALK 21), Vancouver, BC, Canada, 3–5 October 2011. [Google Scholar]
- Mackett, R.L. Children’s travel behavior and its health implications. Transp. Policy 2013, 26, 66–72. [Google Scholar] [CrossRef]
- Fyhri, A.; Hjorthol, R. Children’s independent mobility to school, friends and leisure activities. J. Transp. Geogr. 2009, 17, 377–384. [Google Scholar] [CrossRef]
- Carver, A.; Timperio, A.; Crawford, D. Parental chauffeurs: What drives their transport choice? J. Transp. Geogr. 2013, 26, 72–77. [Google Scholar] [CrossRef]
- Curtis, C.; Babb, C.; Olaru, D. Built environment and children’s travel to school. Transp. Policy 2015, 42, 21–33. [Google Scholar] [CrossRef]
- Boarnet, M.G.; Andson, C.L.; Day, K.; McMillan, T.E.; Alfonzo, M. Evaluation of the California safe routes to school legislation: Urban form change and children’s active transportation to school. Am. J. Prev. Med. 2005, 28, 134–140. [Google Scholar] [CrossRef] [PubMed]
- Martin, S.; Carlson, S. Barriers to children walking to or from school—United States, 2004. Morb. Mortal. Wkly. Repost 2005, 54, 949–952. [Google Scholar]
- McDonald, N.C.; Aalborg, A.E. Why parents drive children to school: Implications for safe routes to school programs. J. Am. Plan. Assoc. 2009, 75, 331–342. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration, School Bus Driver In-Service Safety Series. Available online: https://www.nhtsa.gov/sites/nhtsa.gov/files/hs811539a.pdf (accessed on 26 October 2023).
- Finklehor, D.; Ormrod, R. Kidnapping of Juveniles: Patterns from NIBRS; Juvenile Justice Bulletin; U.S. Department of Justice, Office of Justice Programs, Office of Juvenile Justice and Delinquency Prevention: Washington, DC, USA, 2000.
- Oprescu, A.M.; Miro-Amarante, G.; Garcia-Diaz, L.; Rey, V.E.; Chimenea-Toscano, A.; Martinez-Martinez, R.; Romero-Ternero, M.C. Towards a data collection methodology for responsible Artificial Intelligence in health: A prospective and qualitative study in pregnancy. Inf. Fusion 2022, 83–84, 57–78. [Google Scholar] [CrossRef]
- Pamuła, T. Traffic flow analysis based on the real data using neural networks. In Telematics in the Transport Environment; Mikulski, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 364–371. [Google Scholar]
- Srisaeng, P.; Baxter, G.S.; Wild, G. Forecasting demand for low-cost carriers in Australia using an artificial neural network approach. Aviation 2015, 19, 90–103. [Google Scholar] [CrossRef]
- Rong, Y.; Zhang, X.; Feng, X.; Ho, T.K.; Wei, W.; Xu, D. Comparative analysis for traffic flow forecasting models with real-life data in Beijing. Adv. Mech. Eng. 2015, 7, 1–9. [Google Scholar] [CrossRef]
- Dai, X.; Fu, R.; Lin, Y.; Li, L.; Wang, F.Y. Deep trend: A deep hierarchical neural network for traffic flow prediction. arXiv 2017, arXiv:1707.03213. Available online: https://arxiv.org/abs/1707.03213 (accessed on 26 October 2023).
- Siddiquee, M.S.A.; Hoque, S. Predicting the daily traffic volume from hourly traffic data using artificial neural network. Neural Netw. World 2017, 27, 283–294. [Google Scholar] [CrossRef]
- Yan, Z.; Yang, H.; Li, F.; Lin, Y. A deep learning approach for short-term airport traffic flow prediction. Aerospace 2022, 9, 11. [Google Scholar] [CrossRef]
- Gu, Y.; Wang, Y.; Dong, S. Public traffic congestion estimation using an artificial neural network. Int. J. Geo-Inf. 2020, 9, 152. [Google Scholar] [CrossRef]
- Kolidakis, S.; Botzoris, G.; Profillidis, V.; Lemonakis, P. Road traffic forecasting—A hybrid approach combining Artificial Neural Network with Singular Spectrum Analysis. Econ. Anal. Policy 2019, 64, 59–171. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Short-term traffic forecasting: Where we are and where we are going. Transp. Res. Part C Emerg. Technol. 2014, 4, 3–19. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, H. Evaluating toll revenue uncertainty using neural network models. Transp. Res. Procedia 2017, 25, 2949–2956. [Google Scholar] [CrossRef]
- Wu, J.; Zhong, L.; Li, L.; Lu, A. A prediction model based on time series data in Intelligent Transportation System. In Information Computing and Applications; Yang, Y., Ma, M., Liu, B., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 420–429. [Google Scholar]
- Olayode, I.O.; Tartibu, L.K.; Okwu, M.O.; Severino, A. Comparative traffic flow prediction of a heuristic ANN model and a hybrid ANN-PSO model in the traffic flow modelling of vehicles at a four-way signalized road intersection. Sustainability 2021, 13, 10704. [Google Scholar] [CrossRef]
- Azeez, O.S.; Pradhan, B.; Shafri, H.Z.; Shukla, N.; Lee, C.W.; Rizeei, H.M. Modeling of CO emissions from traffic vehicles using artificial neural networks. Appl. Sci. 2019, 9, 313. [Google Scholar] [CrossRef]
- Athanasiou, S.; Giannopoulos, G.; Graux, D.; Karagiannakis, N.; Lehmann, J.; Ngomo, A.C.N.; Patroumpas, K.; Sherif, M.A.; Skoutas, D. Big POI data integration with Linked Data technologies. In Proceedings of the 22nd International Conference on Extending Database Technology (EDBT), Lisbon, Portugal, 26–29 March 2019; pp. 477–488. [Google Scholar]
- Skoutas, D.; Sacharidis, D.; Stamatoukos, K. Identifying and Describing Streets of Interest. In Proceedings of the International Conference on Extending Database Technology (EDBT), Bordeaux, France, 15–18 March 2016; pp. 437–448. [Google Scholar]
- AI Multiple. Available online: https://research.aimultiple.com/data-collection-methods/#further-reading (accessed on 26 October 2023).
- Islam, M.R.; Hadiuzzaman, M.; Banik, R.; Hasnat, M.M.; Musabbir, S.R.; Hossain, S. Bus service quality prediction and attribute ranking: A neural network approach. Public Transp. 2016, 8, 295–313. [Google Scholar] [CrossRef]
- Wagale, M.; Singh, A.P.; Singh, A. Neural networks approach for evaluating quality of service in public transportation in rural areas. In Proceedings of the 1st India International Conference on Information Processing, Delhi, India, 12–14 August 2016; pp. 1–5. [Google Scholar]
- Deb, S.; Ahmed, M.A.; Das, D. Service quality estimation and improvement plan of bus Service: A perception and expectation based analysis. Case Stud. Transp. Policy 2022, 10, 1775–1789. [Google Scholar] [CrossRef]
- Akgol, K.; Aydin, M.M.; Asilkan, O.; Guney, B. Prediction of modal shift using Artificial Neural Networks. TEM J. 2014, 3, 223–229. [Google Scholar]
- Dias, S.; Abdullah, M.; Lovreglio, R.; Sachchithanantham, S.; Rekatheeban, M.; Sathyaprasad, I.M.S. Exploring home-to-school trip mode choices in Kandy, Sri Lanka. J. Transp. Geogr. 2022, 99, 103279. [Google Scholar] [CrossRef]
- Assi, K.J.; Shafiullah, M.; Nahiduzzaman, K.M.; Mansoor, U. Travel-To-School Mode Choice Modelling Employing Artificial Intelligence Techniques: A Comparative Study. Sustainability 2019, 11, 4484. [Google Scholar] [CrossRef]
- Wen, L.M.; Fry, D.; Rissel, C.; Dirkis, H.; Balafas, A.; Merom, D. Factors associated with children being driven to school: Implications for walk to school programs. Health Educ. Res. 2008, 23, 325–334. [Google Scholar] [CrossRef]
- Jones, J.; Hidiroglou, M. Capturing, coding, and cleaning survey data. In Designing and Conducting Business Surveys; Snijkers, G., Haraldsen, G., Jones, J., Willimack, D., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2013; pp. 459–504. [Google Scholar]
- Kotoula, K.M.; Kolidakis, S.; Botzoris, G.; Aifadopoulou, G. A Joint Methodological Approach for Interpreting School Mobility Patterns and Decisions. In Smart Energy for Smart Transport, Proceedings of the 6th Conference on Sustainable Urban Mobility, CSUM2022, Skiathos Island, Greece, 31 August–2 September 2022; Springer: Berlin/Heidelberg, Germany, 2023. [Google Scholar]
- Kotoula, K.M.; Botzoris, G.; Aifantopoulou, G.; Profillidis, V. Exploring the factors influencing parental choices on school trips. Period. Polytech. Transp. Eng. 2021, 49, 369–381. [Google Scholar] [CrossRef]
- Zheng, H.; Wu, Y. A XGBoost Model with Weather Similarity Analysis and Feature Engineering for Short-Term Wind Power Forecasting. Appl. Sci. 2019, 9, 3019. [Google Scholar] [CrossRef]
- Borucka, A. Logistic regression in modeling and assessment of transport services. Open Eng. 2020, 10, 26–34. [Google Scholar] [CrossRef]
- Bingrong, S.; Byungkyu, B. Route choice modeling with Support Vector Machine. Transp. Res. Procedia 2017, 25, 1806–1814. [Google Scholar]
- Sekhar, C.R.; Minal; Madhu, E. Mode choice analysis using Random Forest Decision Trees. Transp. Res. Procedia 2016, 17, 644–652. [Google Scholar] [CrossRef]
- Jiajia, L.; Lingyun, Z.; Cancan, N.; Yunzhe, A.; Chuanyu, Z.; Anzhen, Z. Efficient k Nearest Neighbor Query Processing on Public Transportation Network. In Proceedings of the IEEE 20th International Conference on Trust, Security and Privacy in Computing and Communications (TrustCom), Shenyang, China, 20–22 October 2021. [Google Scholar]
- Long, C.; Xuewu, C.; Jonas, D.; Xinjun, L.; Frank, W. Applying a random forest method approach to model travel mode choice. Travel Behav. Soc. 2019, 14, 1–10. [Google Scholar]
- Che-Ming, C.; Chia-Ching, L.; Chih-Peng, C. Long-term travel time prediction using gradient boosting. J. Intell. Transp. Syst. 2020, 24, 109–124. [Google Scholar]
- Lartey, B.; Homaifar, A.; Girma, A.; Karimoddini, A.; Opoku, D. XGBoost: A tree-based approach for traffic volume prediction. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Melbourne, Australia, 17–20 October 2021. [Google Scholar]
- Chicco, D.; Jurman, G. The advantages of the Matthews correlation coefficient (MCC) over F1 score and accuracy in binary classification evaluation. BMC Genom. 2020, 21, 6. [Google Scholar] [CrossRef] [PubMed]


| Research Work Title | Author(s) and Year | Key Findings |
|---|---|---|
| Active commuting to school: Associations with environment and parental concerns | Kerr et al., 2006 [4] |
|
| School trips in Germany: Gendered escorting practice | Sheiner, 2016 [5] | |
| A mode choice analysis of School trips in New Jersey | Noland et al., 2010 [6] | |
| Parental attitudes towards children walking and bicycling to school: a multivariate ordered response analysis | Seraj et al., 2012, [7] | |
| Integrating parental attitudes in research on children’s active school commuting: evidence from a community school travel survey | Yang and Markowitz, 2012 [8] | |
| Children’s travel: patterns and influences | Donald, 2005 [9] | |
| Children’s travel behavior a world of difference | Zwerts and Wets, 2006 [10] | |
| Children’s independent spatial mobility in the urban public realm | O’ Brien et al., 2000 [11] | |
| Statewide prevalence and correlates of walking and bicycling to school | Evenson et al., 2003 [12] | |
| Determinants of car travel on daily journeys to school: cross sectional survey of primary school children | DiGuiseppi et al., 1998 [13] |
|
| Active transportation mode choice behavior across genders in school trips | Ermagun and Samimi, 2012 [14] |
|
| Intra-household travel interactions, the built environment and school travel mode choice: an exploration using spatial models | Mitra and Buliung, 2012 [15] | |
| An analysis of the determinants of children’s weekend physical activity participation | Copperman and Bhat, 2007 [16] | |
| Letting children be free to walk | Mackett, 2011 [17] | |
| Children’s travel behavior and its health implications | Mackett, 2013 [18] |
|
| Children’s independent mobility to school, friends and leisure activities | Fyhri and Hjorthol, 2009 [19] | |
| Parental chauffeurs: what drives their transport choice | Carver et al., 2013 [20] | |
| Built environment and children’s travel to school | Curtis et al., 2015 [21] | |
| Evaluation of the California safe routes to school legislation: urban form change and children’s active transportation to school | Boarnet et al., 2005 [22] | |
| Barriers to children walking to or from school | Martin and Carlson, 2005 [23] |
|
| Why parents drive children to school: implications for safe routes to school programs | McDonald and Aalborg, 2009 [24] |
| Research Work Title | Author/Year | Research Topic | Method(s) Used |
|---|---|---|---|
| Traffic flow analysis based on the real data using neural networks | Pamula, 2012 [28] | Traffic flow forecast | ANN models |
| Forecasting demand for low-cost carriers in Australia using an artificial neural network approach | Srisaeng and Baxter, 2015 [29] | Air transport demand forecast | Econometric and ANN models |
| Comparative analysis for traffic flow forecasting models with real-life data in Beijing | Rong et al., 2015 [30] | Traffic flow forecast | Autoregressive integrated moving average (ARIMA) and ANN models |
| Deep trend: A deep hierarchical neural network for traffic flow prediction | Dai et al., 2017 [31] | Traffic flow time series | DeepTrend ANN models |
| Predicting the daily traffic volume from hourly traffic data using artificial neural network | Siddiquee and Hoque, 2017 [32] | Traffic flow forecast | ANN models |
| A deep learning approach for short-term airport traffic flow prediction | Yan et al. [33] | Air transport demand forecast | Machine learning techniques (gated recurrent units, graph convolutional networks, ANN) |
| Real-time intraday traffic volume forecasting—A hybrid application using singular spectrum analysis and artificial neural networks | Kolidakis et al., 2019 [35] | Traffic flow forecast | Hybrid singular spectrum analysis (SSA)—ANN models |
| Short-term traffic forecasting: Where we are and where we are going | Vlahogianni et al., 2014 [36] | Traffic flow forecast | Review on short-term traffic forecasting models |
| Evaluating toll revenue uncertainty using neural network models | Zhao and Zhao, 2017 [37] | Traffic demand forecast | Big data-based models |
| A prediction model based on time series data in Intelligent Transportation System | Wu et al., 2013 [38] | Massive traffic transportation network problems | ARIMA and generalized regression neural network (GRNN) models |
| Comparative Traffic Flow Prediction of a Heuristic ANN Model and a Hybrid ANN-PSO Model in the Traffic Flow Modelling of Vehicles at a Four-Way Signalized Road Intersection | Olayode et al., 2021 [39] | Short-term urban traffic flow forecast | Heuristic ANN and hybrid ANN–particle swarm optimization models |
| Modeling of CO emissions from traffic vehicles using artificial neural networks | Azeez et al., 2019 [40] | Vehicular carbon monoxide emissions | Hybrid geographic information system and ANN model |
| Identifying and describing streets of interest | Skoutas et al., 2016 [42] | Streets of interest identification | Multiclass support vector machines (SVMs) classification |
| Bus service quality prediction and attribute ranking: a neural network approach | Islam et al., 2016 [44] | Evaluation of public transport service quality | GRNN, probabilistic neural network, pattern recognition neural network models |
| Neural networks approach for evaluating quality of service in public transportation in rural areas | Wagale et al., 2014 [45] | Evaluation of public transport service quality | ANN models |
| Service quality estimation and improvement plan of bus Service: A perception and expectation based analysis | Deb et al. (2022) [46] | Evaluation of public transport service quality | ANN models |
| Prediction of modal shift using Artificial Neural Networks | Akgol et al. (2014) [47] | Shift from private vehicles to public transport | ANN models |
| Exploring home-to-school trip mode choices in Kandy, Sri Lanka | Dias et al., 2022 [48] | School travel mode prediction | ANN models |
| Travel-to-school mode choice modelling employing Artificial Intelligence techniques: a comparative study | Assi et al., 2019 [49] | School travel mode prediction | Machine learning tools (extreme learning machine, SVM, ANN) |
| Classification Model | Accuracy | F1–Score | Precision | TPR (Recall) | AUC–ROC Score | FPR | MCC | CCI | ICI |
|---|---|---|---|---|---|---|---|---|---|
| LR | 0.71 | 0.72 | 0.68 | 0.76 | 0.71 | 0.33 | 0.43 | 106 | 43 |
| SVC | 0.89 | 0.89 | 0.89 | 0.87 | 0.89 | 0.10 | 0.77 | 132 | 17 |
| DT | 0.86 | 0.86 | 0.82 | 0.90 | 0.86 | 0.18 | 0.72 | 128 | 21 |
| KNN | 0.79 | 0.77 | 0.80 | 0.75 | 0.79 | 0.17 | 0.58 | 118 | 31 |
| RF | 0.89 | 0.89 | 0.89 | 0.89 | 0.89 | 0.10 | 0.78 | 133 | 16 |
| GB | 0.90 | 0.90 | 0.91 | 0.87 | 0.89 | 0.08 | 0.79 | 134 | 15 |
| XGB | 0.87 | 0.87 | 0.88 | 0.83 | 0.86 | 0.10 | 0.73 | 129 | 20 |
| Voting | 0.90 | 0.90 | 0.88 | 0.92 | 0.90 | 0.11 | 0.80 | 134 | 15 |
| Mode for school commuting predicted by the classifier | |||
| Motorized transport mode | Non-motorized transport mode | ||
| Mode for school commuting preferred by the parents | Motorized transport mode | 47 75.8% | 15 24.2% |
| Non-motorized transport mode | 6 6.9% | 81 93.1% | |
| Labeled Factors (Latent Variables) | Change (%) and Modified Values of Factors’ Means in the 5-Point Likert Scale | Percentage (%) of Non-Motorized School Transport Modes for Specific Changes of Factors’ Mean Values | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| −40% | −20% | 0% | +20% | +40% | +50% | −40% | −20% | 0% | +20% | +40% | +50% | |
| MOTHEALTH: Parameters of parental motivation to choose a transport mode related to the physical and mental health of a student | 2.04 1 | 2.72 | 3.39 | 3.90 | 4.41 | >5.00 | 63.8% | 64.6% | 66.1% | 72.7% | 79.7% | n.a. |
| ATTBUS: Parents perception regarding the use of public buses | 1.36 2 | 1.81 | 2.26 | 2.60 | 2.94 | 3.39 | 74.9% | 70.6% | 66.1% | 64.0% | 61.0% | 59.6% |
| ATTCAR: Parents perception regarding the use of private vehicles | 1.84 2 | 2.45 | 3.06 | 3.52 | 3.98 | 4.59 | 71.9% | 69.0% | 66.1% | 63.3% | 61.5% | 61.3% |
| ATTWALKBIK: Parents perception regarding the use of non-motorized transport modes (walking, bicycle) | 2.48 2 | 3.31 | 4.14 | 4.76 | >5.00 | >5.00 | 63.2% | 65.7% | 66.1% | 69.4% | n.a. | n.a. |
| MOTCAR: Parameters related to the usability of private vehicles | 1.84 1 | 2.46 | 3.07 | 3.53 | 3.99 | 4.61 | 68.3% | 67.9% | 66.1% | 64.4% | 61.7% | 60.9% |
| NEIGBSAF: Parameters related to the sense of security provided by the neighborhood | 1.97 2 | 2.63 | 3.29 | 3.78 | 4.28 | 4.94 | 62.9% | 65.1% | 66.1% | 66.2% | 67.0% | 67.8% |
| ROUTESAF: Parameters related to the sense of safety provided by the sidewalks and the whole path the student follows | 1.38 2 | 1.84 | 2.30 | 2.65 | 2.99 | 3.45 | 52.8% | 58.8% | 66.1% | 71.1% | 76.0% | 77.9% |
| Labeled Factors (Latent Variables) | Change in the Percentage of Non-Motorized School Commuting Resulting from a 1% Decrease in the Mean Values of the Specific Factor | Change in the Percentage of Non-Motorized School Commuting Resulting from a 1% Increase in the Mean Values of the Specific Factor |
|---|---|---|
| MOTHEALTH: Parameters of parental motivation to choose a transport mode related to the physical and mental health of a student | –0.11% 1 or 1.1 out of 1000 parents will shift from non-motorized to motorized modes | +0.48% or an additional 4.8 out of 1000 parents will opt for non-motorized modes |
| ATTBUS: Parents perception regarding the use of public buses | +0.33% or an additional 3.3 out of 1000 parents will opt for non-motorized modes | –0.16% or 1.6 out of 1000 parents will shift from non-motorized to motorized modes |
| ATTCAR: Parents perception regarding the use of private vehicles | +0.21% or an additional 2.1 out of 1000 parents will opt for non-motorized modes | –0.22% or 2.1 out of 1000 parents will shift from non-motorized to motorized modes |
| ATTWALKBIK: Parents perception regarding the use of non-motorized transport modes (walking, bicycle) | –0.03% Marginal change not worthy of comment | +0.24% or an additional 2.4 out of 1000 parents will opt for non-motorized modes |
| MOTCAR: Parameters related to the usability of private vehicles | +0.13% or an additional 1.3 out of 1000 parents will opt for non-motorized modes | –0.13% or 1.3 out of 1000 parents will shift from non-motorized to motorized modes |
| NEIGBSAF: Parameters related to the sense of security provided by the neighborhood | –0.08% Marginal change not worthy of comment | +0.01% Marginal change not worthy of comment |
| ROUTESAF: Parameters related to the sense of safety provided by the sidewalks and the whole path the student follows | –0.58% or 5.8 out of 1000 parents will shift from non-motorized to motorized modes | +0.37% or an additional 3.7 out of 1000 parents will opt for non-motorized modes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolidakis, S.; Kotoula, K.M.; Botzoris, G.; Kamberi, P.F.; Skoutas, D. Assessing Impact Factors That Affect School Mobility Utilizing a Machine Learning Approach. Sustainability 2024, 16, 588. https://doi.org/10.3390/su16020588
Kolidakis S, Kotoula KM, Botzoris G, Kamberi PF, Skoutas D. Assessing Impact Factors That Affect School Mobility Utilizing a Machine Learning Approach. Sustainability. 2024; 16(2):588. https://doi.org/10.3390/su16020588
Chicago/Turabian StyleKolidakis, Stylianos, Kornilia Maria Kotoula, George Botzoris, Petros Fotios Kamberi, and Dimitrios Skoutas. 2024. "Assessing Impact Factors That Affect School Mobility Utilizing a Machine Learning Approach" Sustainability 16, no. 2: 588. https://doi.org/10.3390/su16020588