
Demand Response Strategy Based on the Multi-Agent System and Multiple-Load Participation
Abstract
1. Introduction
2. MAS-Based Demand Response Strategy
2.1. Hierarchical Optimization Model for DR
2.2. Objective Function and Constraints
- (1)
- Constraints on the power reduction of air conditioner loads:where is the difference between the maximum power of the air conditioner aggregation and the current power, and it will change constantly with changes in external temperature.
- (2)
- Constraints on the power reduction of electric vehicle loads:where is the difference between the aggregated maximum power and current power of electric vehicles, which has a negative correlation with their daily load curve.
- (3)
- Constraints applicable to distribution network structure and related power flow that meet cluster partitioning indicators:where and are the active power output and reactive power output of each node; and are the active power demand and reactive power demand of each node; and are constraints on the balance of the active and reactive power of nodes; is the constraint of bus voltage; and and are constraints on the active and reactive outputs of the generator set equipment.
3. Strategies for Demand Respond Based on MAS
3.1. Hierarchical Optimization Model for Demand Response
3.2. Communication Weight and Electrical Distance
4. Load Agent
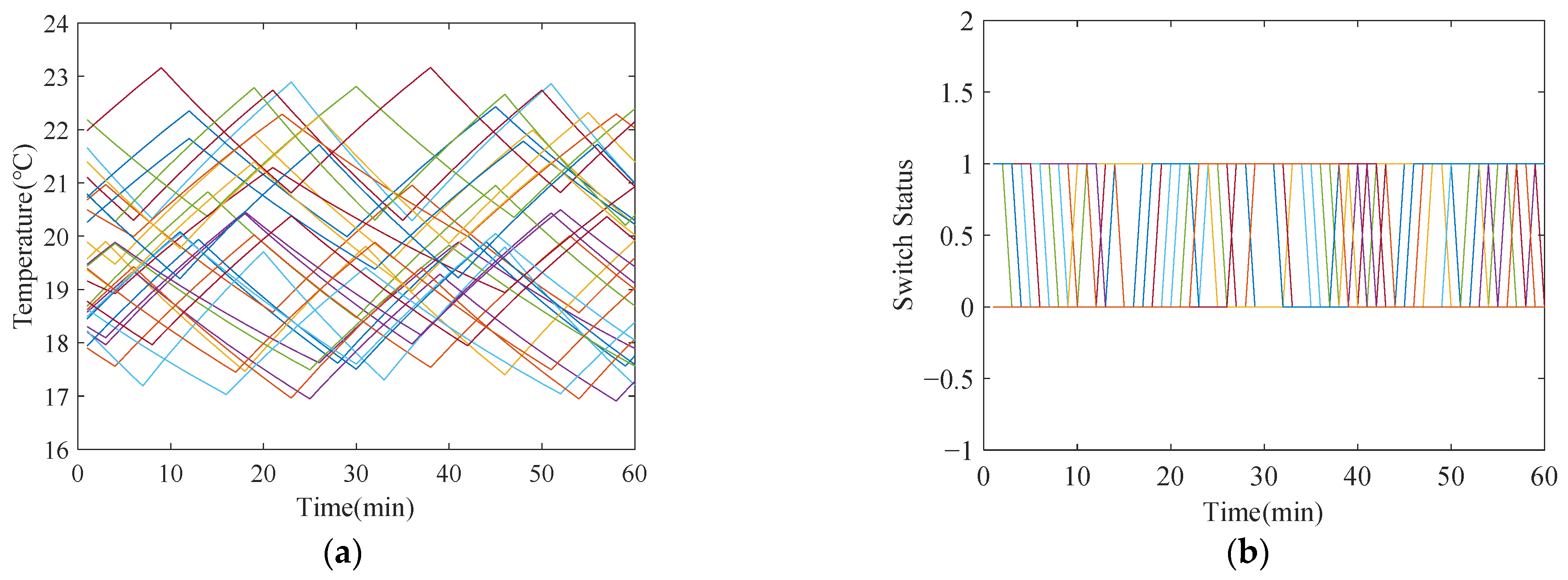
4.1. Air Conditioner Load Aggregation Model
4.2. Electric Vehicle Load Aggregation Model
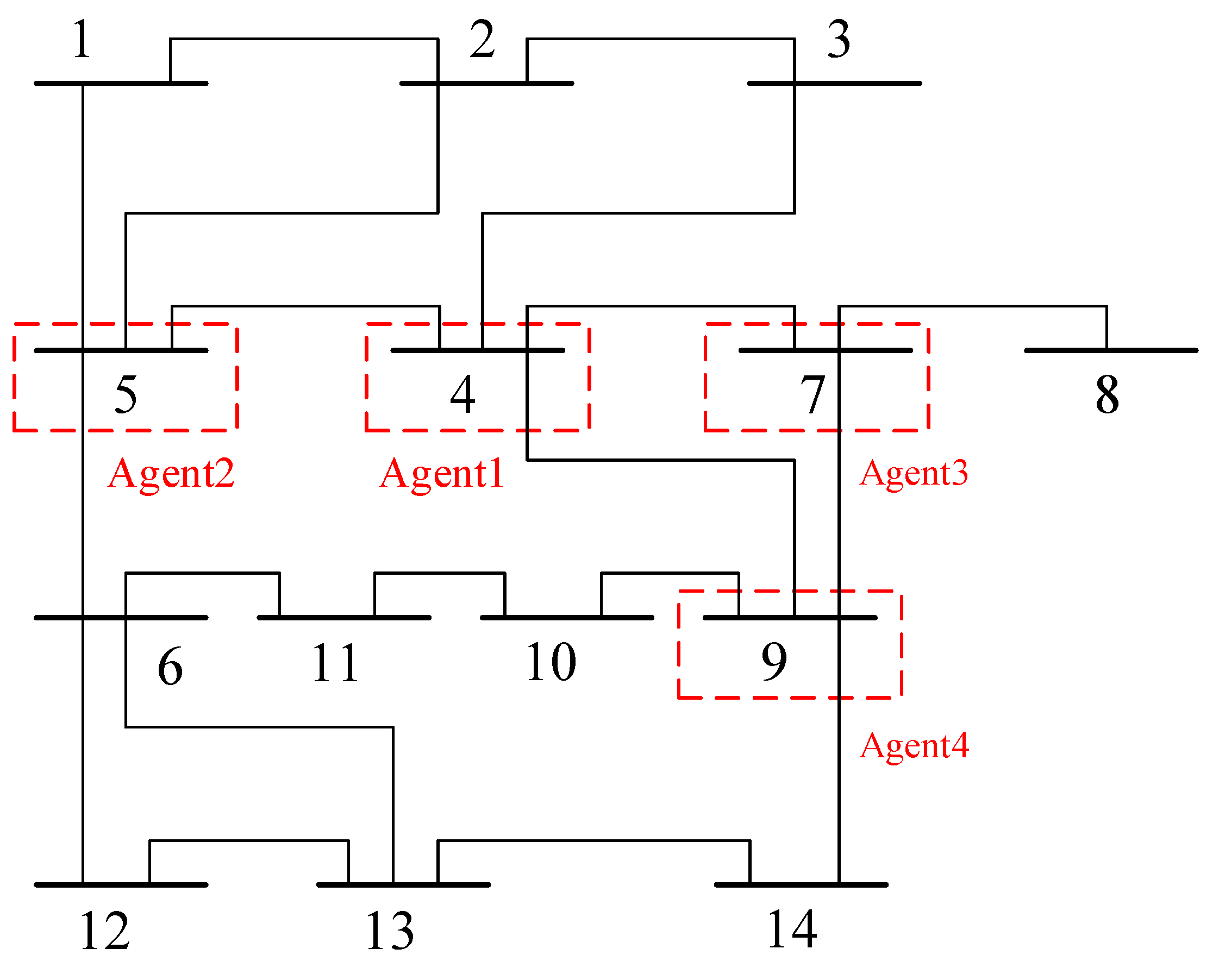
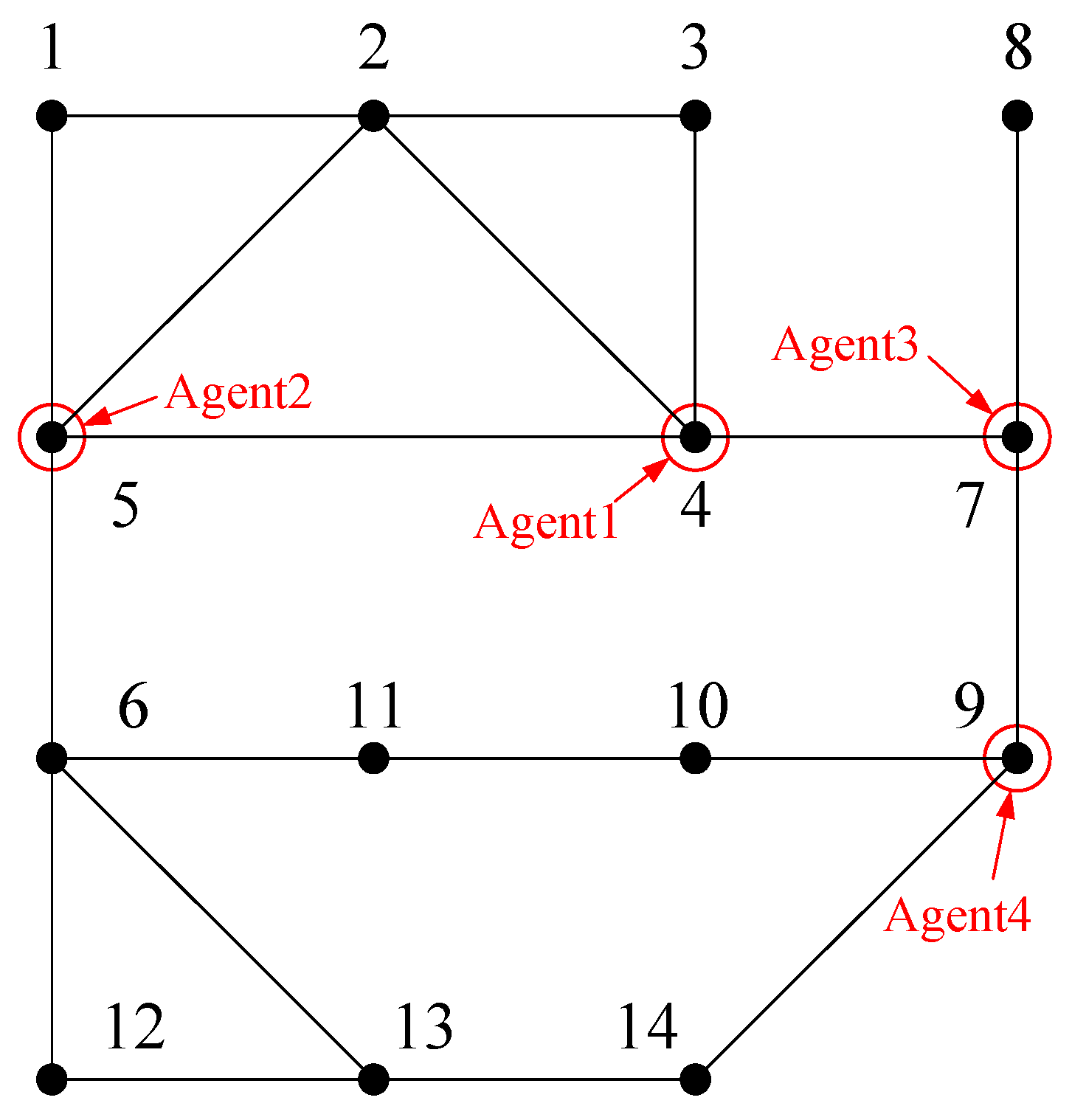
5. Example Analysis
5.1. Basic Parameters
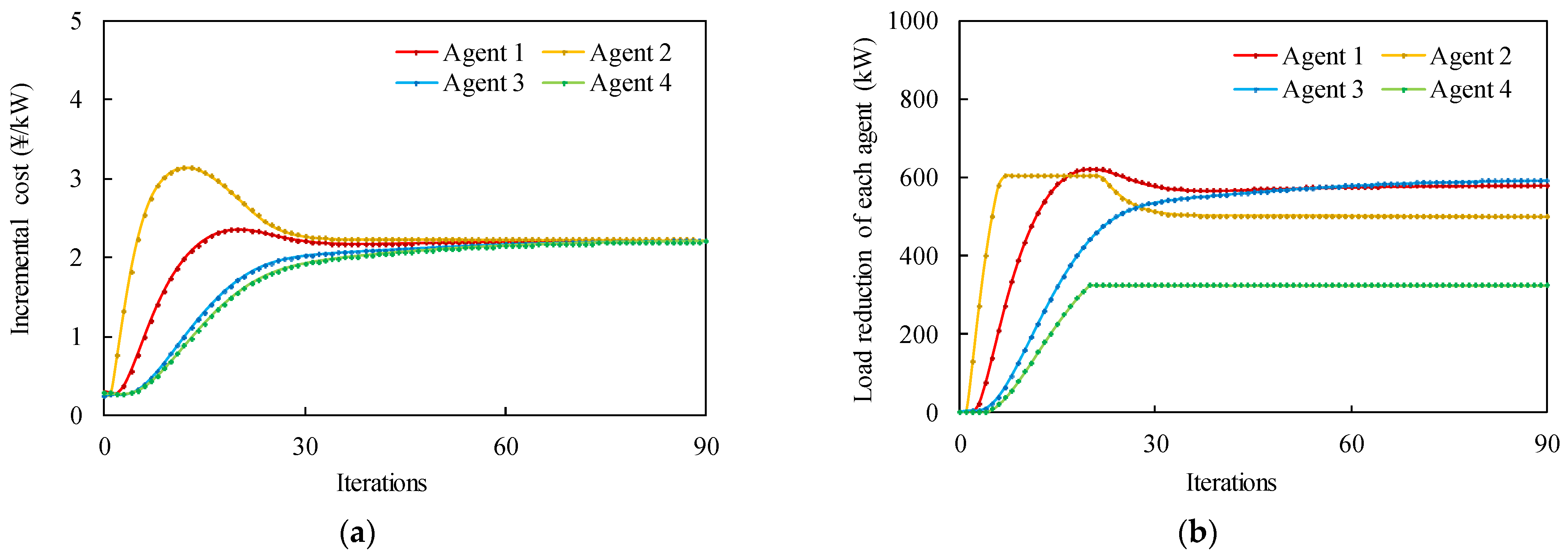
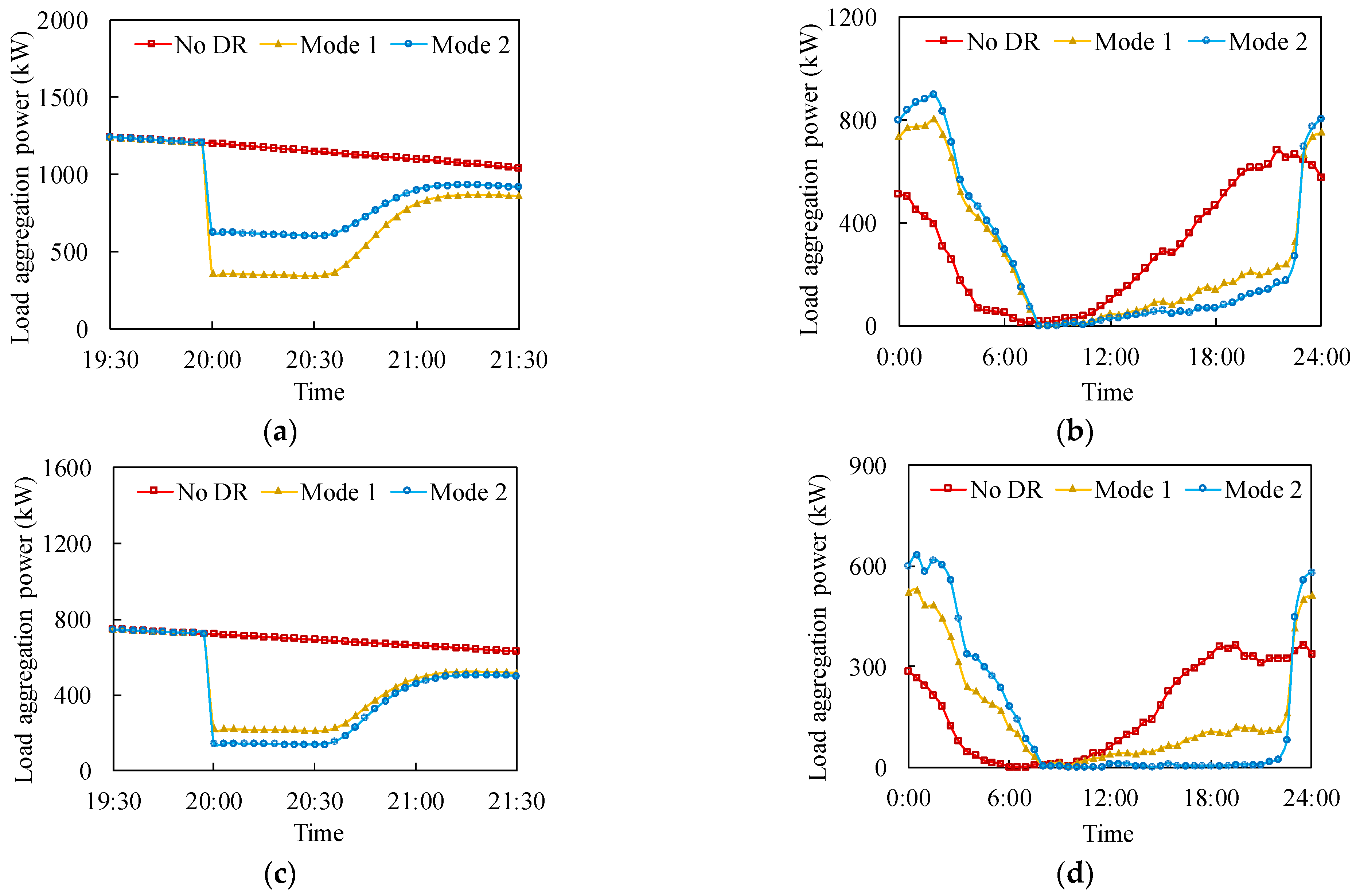
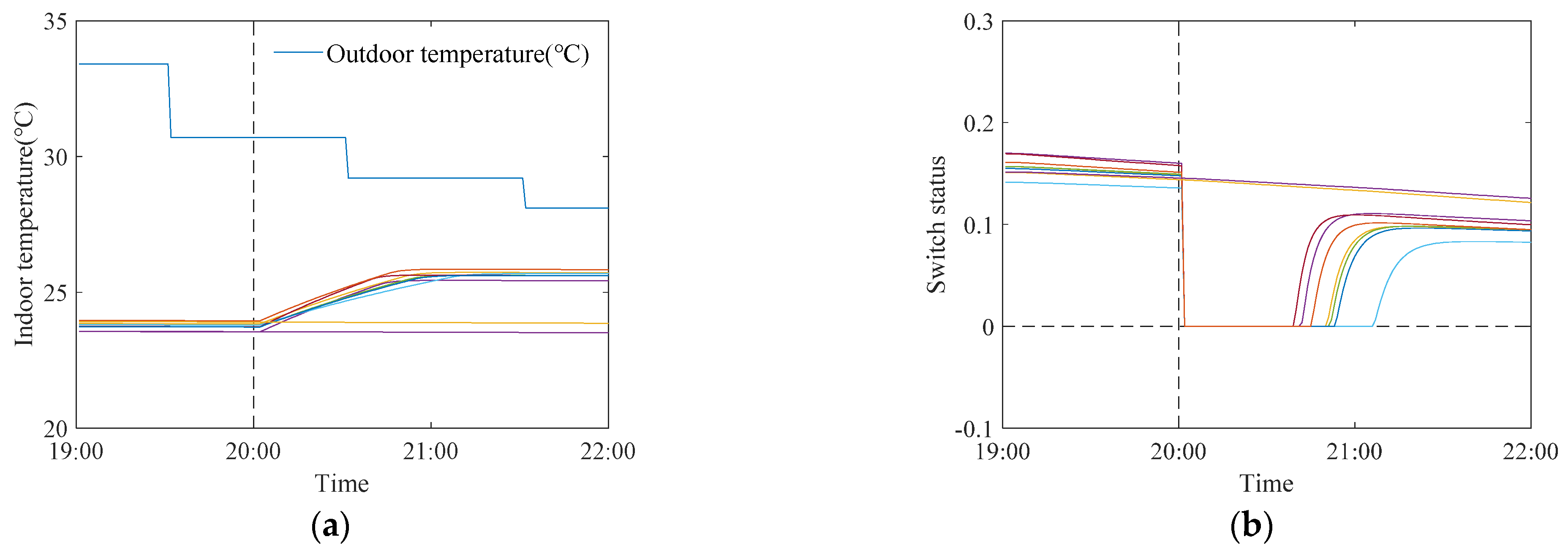
5.2. Evaluation of the Demand Response Ability of Agents
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Meaning |
|---|---|
| total cost | |
| the cost of the i-th agent | |
| total load reduction | |
| the total load reduction of the i-th agent | |
| the i-th air conditioner agent’s load reduction capability | |
| the i-th electric vehicles agent’s load reduction capability | |
| active power output of the i-th node | |
| reactive power output of the i-th node | |
| active power demand of the i-th node | |
| reactive power demand of the i-th node | |
| constraints on active output of generator set equipment | |
| constraints on reactive output of generator set equipment | |
| demand-side cost of the power company | |
| demand response cost of the i-th agent. | |
| Lagrange multiplier | |
| first-order dynamic information of i-th agent | |
| the element in the adjacency matrix | |
| the element in the row random matrix | |
| target load reduction for demand response | |
| convergence coefficient | |
| conductance coefficient | |
| susceptance coefficient | |
| mutual Inductance coefficient | |
| self-inductance coefficient | |
| changes in phase angle | |
| changes in voltage | |
| phase angle—active power sensitivity matrix | |
| phase angle—reactive power sensitivity matrix | |
| voltage—active power sensitivity matrix | |
| voltage—reactive power sensitivity matrix | |
| electrical distance between node i and node j | |
| electrical distance considering other nodes in system | |
| communication weight between nodes. | |
| equivalent heat capacity of the air in the room | |
| equivalent heat capacity of the room wall | |
| indoor air temperature | |
| room wall temperature | |
| equivalent thermal resistance of the air in the room | |
| equivalent thermal resistance of the room wall | |
| current operating power of the air conditioner | |
| rated cooling power of the air conditioner | |
| rated heating power of the air conditioner | |
| current switch status of the air conditioner | |
| temperature control accuracy of the air conditioner | |
| power of the k-th air conditioner before demand response | |
| power of the k-th air conditioner after demand response | |
| daily mileage of the vehicle | |
| expectation of the lognormal distribution | |
| variance of the lognormal distribution | |
| energy consumption of the i-th electric vehicle | |
| energy consumption per kilometer of the i-th electric vehicle | |
| charging power of the i-th electric vehicle | |
| parking start time | |
| parking end time | |
| expectation of the parking start time | |
| variance of the parking start time | |
| expectation of the parking end time | |
| variance of the parking end time | |
| electricity price when charging | |
| valley electricity price | |
| peak electricity price | |
| power of the k-th electric vehicle before demand response | |
| power of the k-th electric vehicle after demand response |
| Variables | Value |
|---|---|
| 0.002 | |
| 6.61 × 103 | |
| 1.67 × 105 | |
| 6.6 × 10−5 | |
| 10−7 | |
| 8000 | |
| 8000 | |
| 1 | |
| 30 | |
| 9 | |
| 0.2 | |
| 18.5 | |
| 4 | |
| 7 | |
| 4 | |
| 0.588 | |
| 0.868 |
Appendix B
References
- The People’s Political Consultative Conference Website (CPPCC). Local Development and Consumption Are the Key to Distributed “Wind and Solar Power”. Available online: http://www.rmzxb.com.cn/c/2021-07-13/2903585.shtml (accessed on 15 August 2023).
- Tang, D.; Fang, Y.P.; Zio, E. Vulnerability analysis of demand-response with renewable energy integration in smart grids to cyber attacks and online detection methods. Reliab. Eng. Syst. Saf. 2023, 235, 109212. [Google Scholar] [CrossRef]
- Bin, Y.; Zhenyu, C.; Yao, H.; Wenjun, R.; Hongquan, Z.; Zhiguo, G. Bi-Level Scheduling Model of Air Conditioning Load Aggregator Considering Users. In Proceedings of the 2020 5th Asia Conference on Power and Electrical Engineering (ACPEE): 1995–2001, Chengdu, China, 4–7 June 2020. [Google Scholar]
- Wu, R.; Wang, D.; Xie, C.; Lai, C.S.; Huang, J.; Lai, L.L. Distributed control method for air conditioner load participation in distribution network voltage management. Autom. Electr. Power Syst. 2021, 45, 215–222. [Google Scholar]
- Wang, L.; Han, L.; Tang, L.; Bai, Y.; Wang, X.; Shi, T. Incentive strategies for small and medium-sized customers to participate in demand response based on customer directrix load. Int. J. Electr. Power Energy Syst. 2024, 115, 109618. [Google Scholar] [CrossRef]
- Wu, H.; Wang, J.; Lu, J.; Ding, M.; Wang, L.; Hu, B.; Sun, M.; Qi, X. Bilevel load-agent-based distributed coordination decision strategy for aggregators. Energy 2022, 240, 122505. [Google Scholar] [CrossRef]
- Alipour, M.; Mohammadi-Ivatloo, B.; Moradi-Dalvand, M.; Zare, K. Stochastic scheduling of aggregators of plug-in electric vehicles for participation in energy and ancillary service. Energy 2017, 118, 1168–1179. [Google Scholar] [CrossRef]
- Zhang, G.; Niu, Y.; Xie, T.; Zhang, K. Multi-level distributed demand response study for a multi-park integrated energy system. Energy Rep. 2023, 9, 2676–2689. [Google Scholar] [CrossRef]
- Hu, D.; Liu, H.; Zhu, Y.; Sun, J.; Zhang, Z.; Yang, L.; Liu, Q.; Yang, B. Demand response-oriented virtual power plant evaluation based on AdaBoost and BP neural network. Energy Rep. 2023, 9, 922–931. [Google Scholar] [CrossRef]
- Rocha, H.R.O.; Honorato, I.H.; Fiorotti, R.; Celeste, W.C.; Silvestre, L.J.; Silva, J.A.L. An Artificial Intelligence based scheduling algorithm for demand-side energy management in Smart Homes. Appl. Energy 2021, 282, 116145. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, W.; Gong, J. Stable Multi-Agent-Based Load Shedding Algorithm for Power Systems. IEEE Trans. Power Syst. 2011, 26, 2006–2014. [Google Scholar]
- Hongfei, X.; Xin, C.; Hao, Q.; Yanyan, L. Secondary voltage regulation strategy applicable to master-slave control microgrids. Electr. Autom. 2020, 42, 20–22. [Google Scholar]
- Shahbazi, H.; Karbalaei, F. Decentralized Voltage Control of Power Systems Using Multi-agent Systems. J. Mod. Power Syst. Clean Energy 2020, 8, 249–259. [Google Scholar] [CrossRef]
- Mahela, O.P.; Khosravy, M.; Gupta, N.; Khan, B.; Alhelou, H.H.; Mahla, R.; Patel, N.; Siano, P. Comprehensive overview of multi-agent systems for controlling smart grids. CSEE J. Power Energy Syst. 2022, 8, 115–131. [Google Scholar]
- Lee, J.W.; Kim, M.K. An Evolutionary Game Theory-Based Optimal Scheduling Strategy for Multiagent Distribution Network Operation Considering Voltage Management. IEEE Access 2022, 10, 50227–50241. [Google Scholar] [CrossRef]
- Wang, Z.; Paranjape, R. Optimal Residential Demand Response for Multiple Heterogeneous Homes with Real-Time Price Prediction in a Multiagent Framework. IEEE Trans. Smart Grid 2017, 8, 1173–1184. [Google Scholar] [CrossRef]
- Dai, M.; Li, H.; Wang, S. Development and implementation of multi-agent systems for demand response aggregators in an industrial context. Appl. Energy 2022, 314, 118841. [Google Scholar]
- Mingkun, D.; Hangxin, L.; Shengwei, W. Multi-agent based distributed cooperative control of air-conditioning systems for building fast demand response. J. Build. Eng. 2023, 77, 107463. [Google Scholar]
- Song, X.; Far, Z.; Menghu, F.; Zechen, W.; Li, M. Assessment Model of Demand Side Load Resources Promoting Non-Hydro Renewables Integration and Consumption. In Proceedings of the 2018 China International Conference on Electricity Distribution (CICED), Tianjin, China, 17 September 2018; pp. 2880–2883. [Google Scholar]
- Wang, Z.; Paranjape, R.; Chen, Z.; Zeng, K. Layered stochastic approach for residential demand response based on real-time pric-ing and incentive mechanism. IET Gener. Transm. Distrib. 2020, 14, 423–431. [Google Scholar] [CrossRef]
- Xiaoqing, H.; Liang, S.; Xiang, G.; Miao, Y.; Peng, C.; Hong, Z.; Zhe, W. Hierarchical Control Architecture and Decentralized Cooperative Control Strategy for Large Scale Air Conditioner Load Participating in Peak Load Regulation. In Proceedings of the 2018 China International Conference on Electricity Distribution (CICED), Tianjin, China, 17 September 2018; pp. 2925–2930. [Google Scholar]
- Ye, Z.; Keyou, W.; Guojie, L.; Bei, H.; Zhaojie, L. Distributed layered control strategy for microgrids based on multi-agent consensus algorithm. Autom. Electr. Power Syst. 2017, 41, 143–149. [Google Scholar]
- Gunduz, H.; Jayaweera, D. Modern power system reliability assessment with cyber-intrusion on heat pump systems. IET Smart Grid 2020, 3, 561–571. [Google Scholar] [CrossRef]
- Prabawa, P.; Choi, D.H. Multi-Agent Framework for Service Restoration in Distribution Systems with Distributed Generators and Static/Mobile Energy Storage Systems. IEEE Access 2020, 8, 51736–51752. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W.; Atkins, E.M. Information consensus in multivehicle cooperative control. IEEE Control. Syst. Mag. 2007, 27, 71–82. [Google Scholar]
- Zhang, W.; Xu, Y.; Liu, W.; Zang, C.; Yu, H. Distributed Online Optimal Energy Management for Smart Grids. IEEE Trans. Ind. Inform. 2015, 11, 717–727. [Google Scholar] [CrossRef]
- Xiao, J.; Guo, X.; Feng, Y.; Bao, H.; Wu, N. Leader-Following Consensus of Stochastic Perturbed Multi-Agent Systems via Variable Impulsive Control and Comparison System Method. IEEE Access 2020, 8, 113183–113191. [Google Scholar] [CrossRef]
- Beibei, W.; Xiaoqing, H.; Weiyang, G.; Yifeng, L.; Lin, K. Decentralized collaborative control strategy for large-scale air conditioner load regulation under hierarchical control architecture. Proc. CSEE 2019, 39, 3514–3527. [Google Scholar]
- Dunnan, L.; Lingxiang, W.; Weiye, W.; Hua, L.; Wen, W.; Mingguang, L. Optimization scheduling of large-scale electric vehicle charging and swapping loads based on deep reinforcement learning. Autom. Electr. Power Syst. 2022, 46, 36–46. [Google Scholar]







| Parameters | Agent 1 | Agent 2 | Agent 3 | Agent 4 |
|---|---|---|---|---|
| Access node | 4 | 5 | 7 | 9 |
| Load aggregation type | AC | EV | AC | EV |
| Number of loads | 1000 | 500 | 600 | 300 |
| Coefficient | 1.7 | 2.0 | 1.6 | 1.9 |
| Coefficient | 297.4 | 254.1 | 257.1 | 281.0 |
| Maximum DR power (kW) | 1201 | 603 | 721 | 324 |
| Agent and Mode | Mode 1 | Mode 2 | ||
|---|---|---|---|---|
| DR Load (kW) | Proportion of DR | DR Load (kW) | Proportion of DR | |
| Agent 1 | 840 | 0.42 | 575.6 | 0.29 |
| Agent 2 | 420 | 0.21 | 501.4 | 0.25 |
| Agent 3 | 500 | 0.25 | 577.8 | 0.29 |
| Agent 4 | 220 | 0.11 | 324 | 0.16 |
| EV Agent | No DR | Mode 1 | Mode 2 |
|---|---|---|---|
| Agent 2 (¥) | 4544.64 | 3872.21 | 3738.66 |
| Agent 4 (¥) | 2787.88 | 2341.12 | 2129.23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, P.; Xu, J.; Zhu, M. Demand Response Strategy Based on the Multi-Agent System and Multiple-Load Participation. Sustainability 2024, 16, 902. https://doi.org/10.3390/su16020902
Zeng P, Xu J, Zhu M. Demand Response Strategy Based on the Multi-Agent System and Multiple-Load Participation. Sustainability. 2024; 16(2):902. https://doi.org/10.3390/su16020902
Chicago/Turabian StyleZeng, Pingliang, Jin Xu, and Minchen Zhu. 2024. "Demand Response Strategy Based on the Multi-Agent System and Multiple-Load Participation" Sustainability 16, no. 2: 902. https://doi.org/10.3390/su16020902
APA StyleZeng, P., Xu, J., & Zhu, M. (2024). Demand Response Strategy Based on the Multi-Agent System and Multiple-Load Participation. Sustainability, 16(2), 902. https://doi.org/10.3390/su16020902