
Passive Safety Assessment of Railroad Trains in Moose Herd Collision Scenarios

Abstract
:1. Introduction
2. Materials and Methods
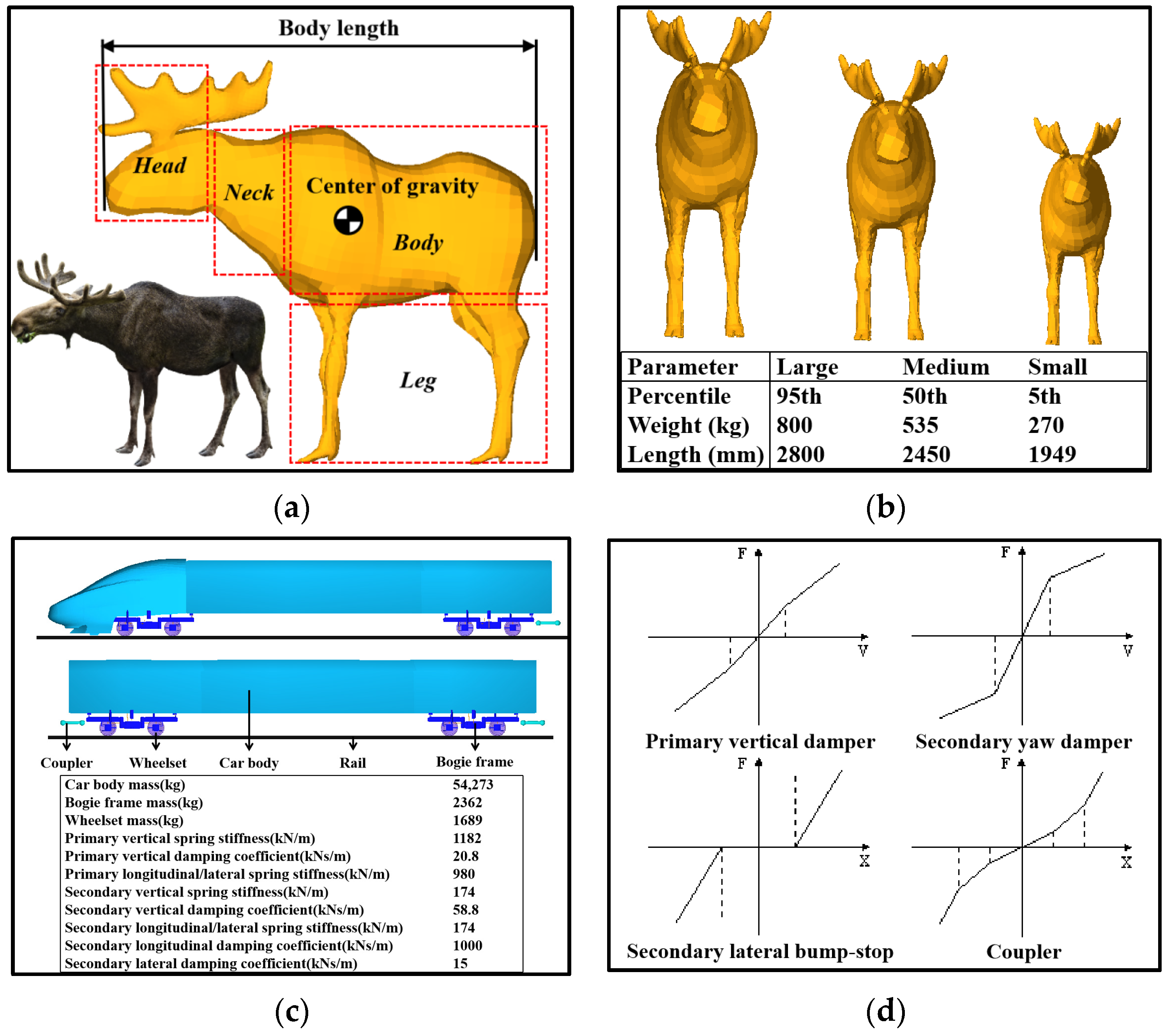
2.1. Development of Moose Models
2.2. Development of Train Models
2.3. Collision Scenarios and Simulation Matrix
2.4. Evaluation Index
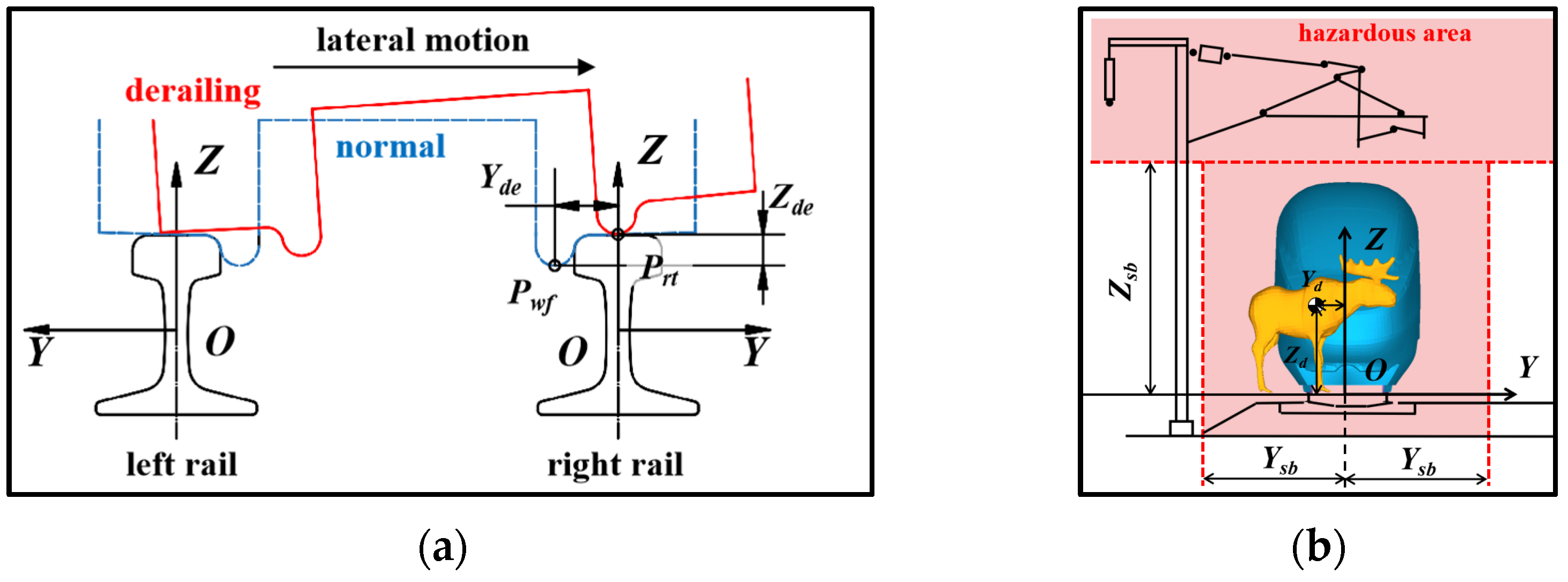
2.4.1. The Evaluation Index of the Train Derailment
2.4.2. The Evaluation Index of the Safety Boundary
3. Results
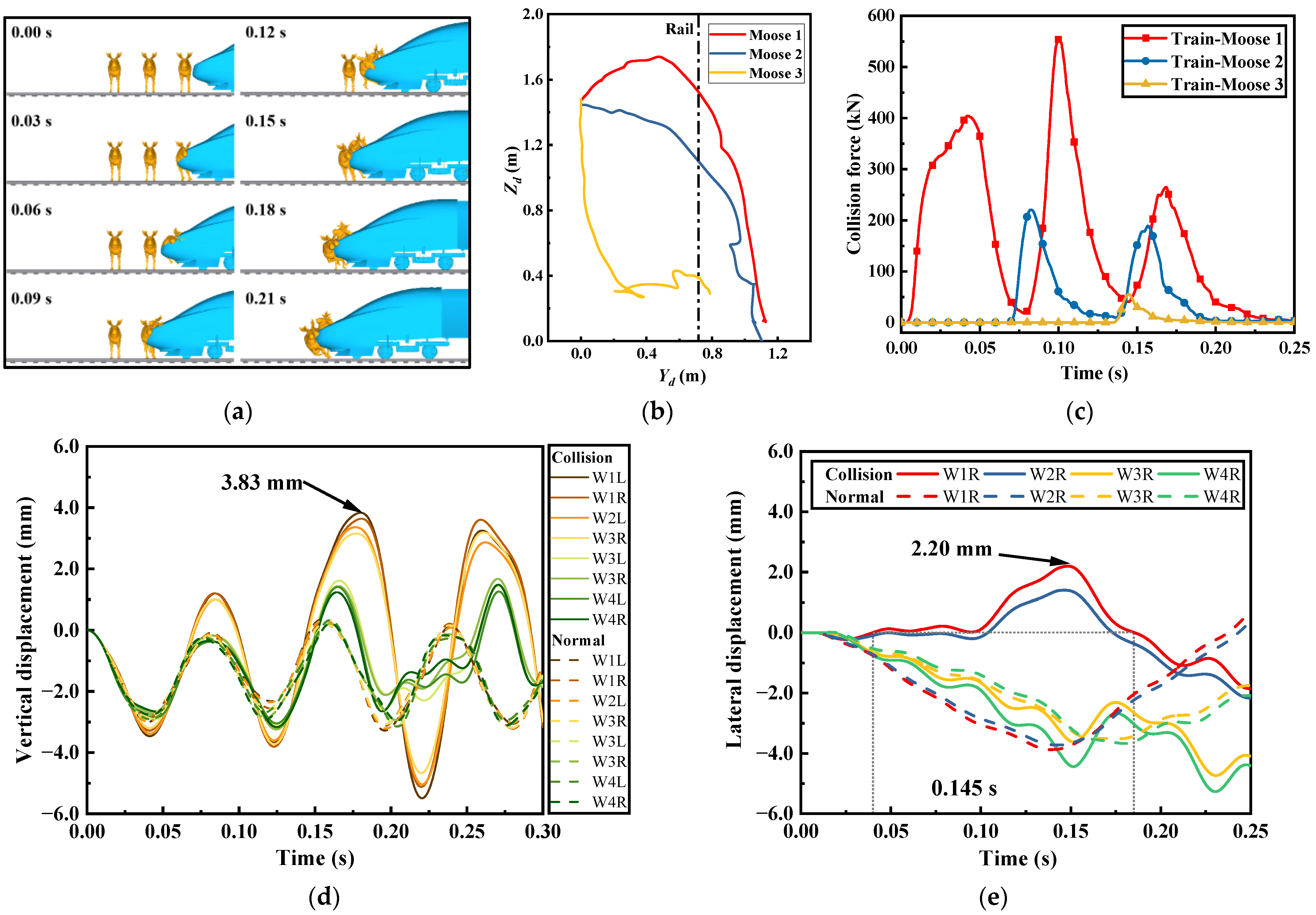
3.1. The Response Process of the Moose Herd–Train Collision in the Baseline Case
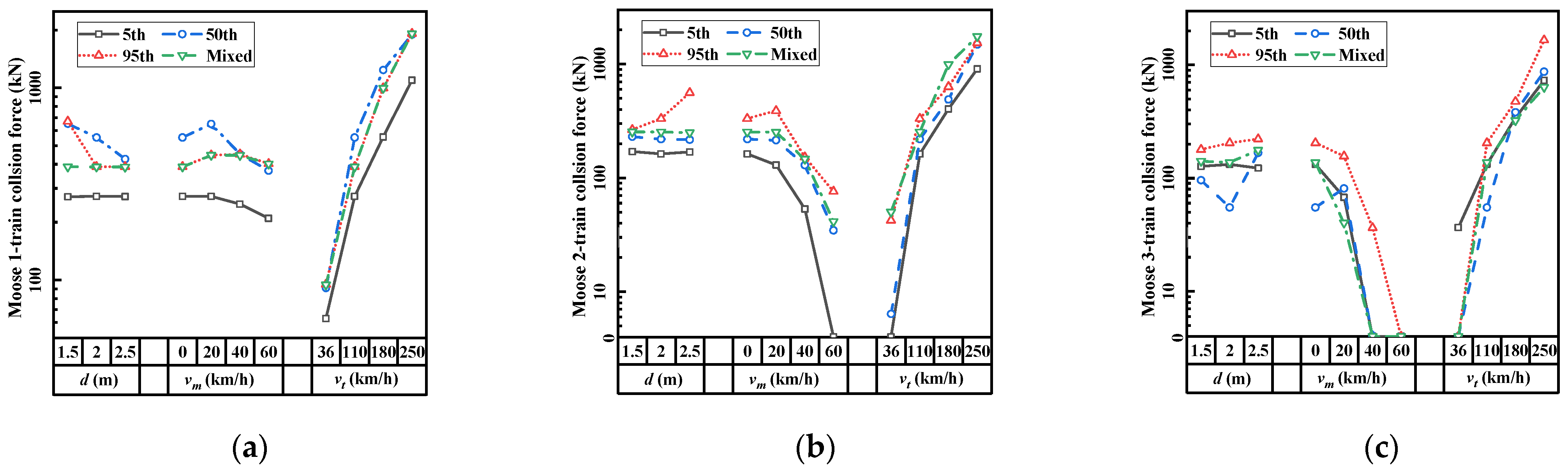
3.2. Simulation Matrixes of Different Collision Scenarios
3.2.1. Collision Force
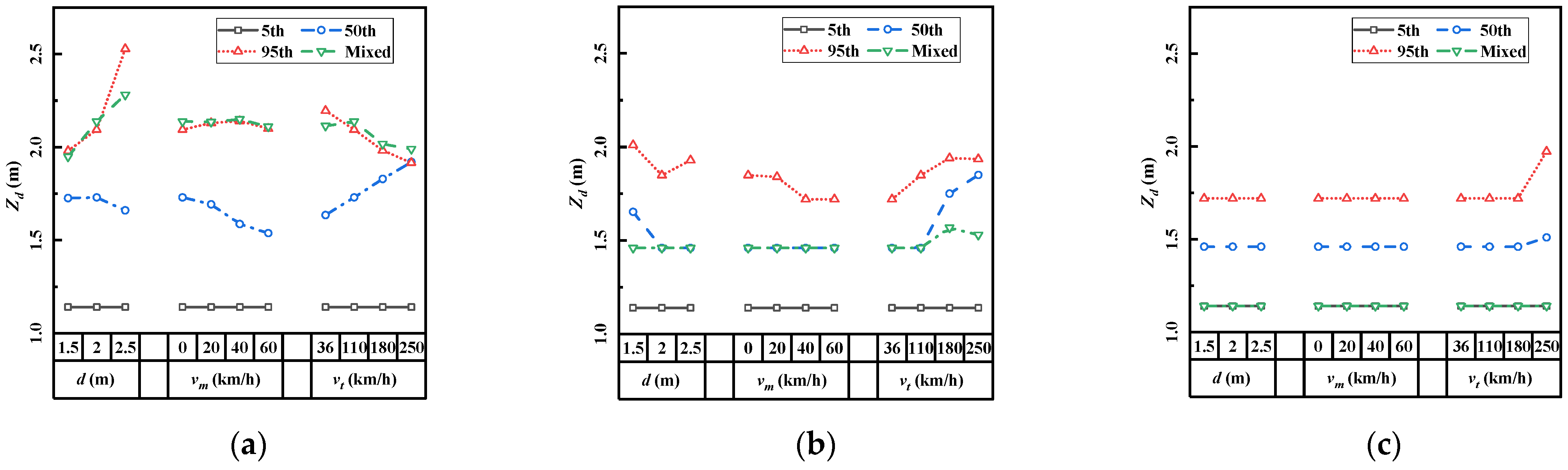
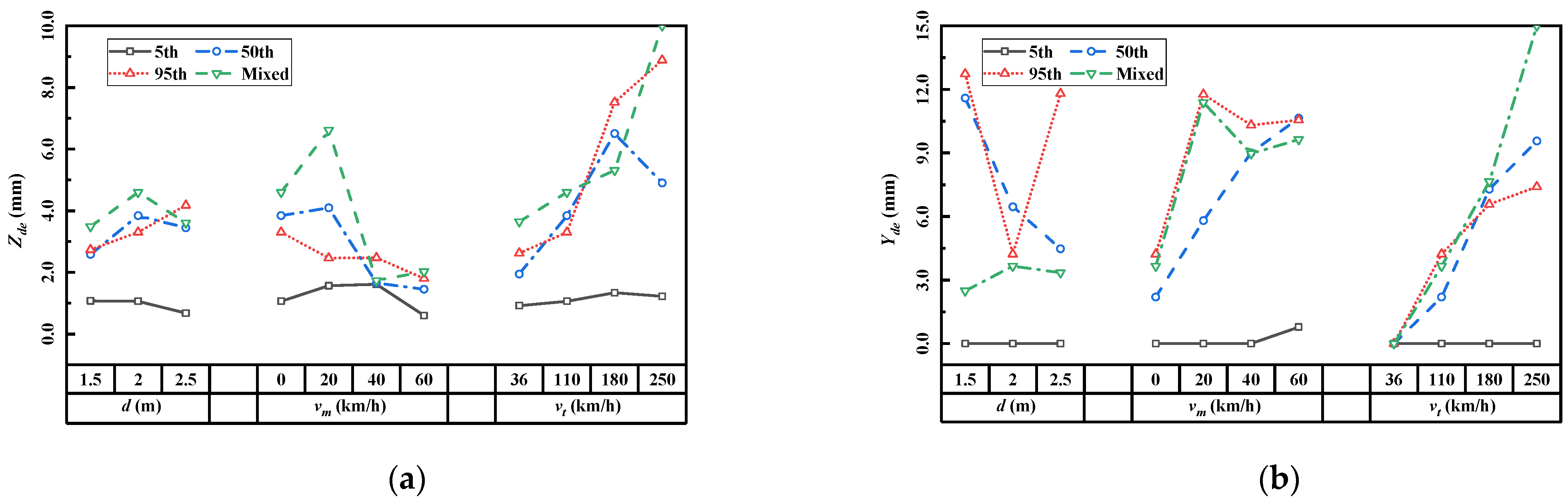
3.2.2. Moose Trajectory
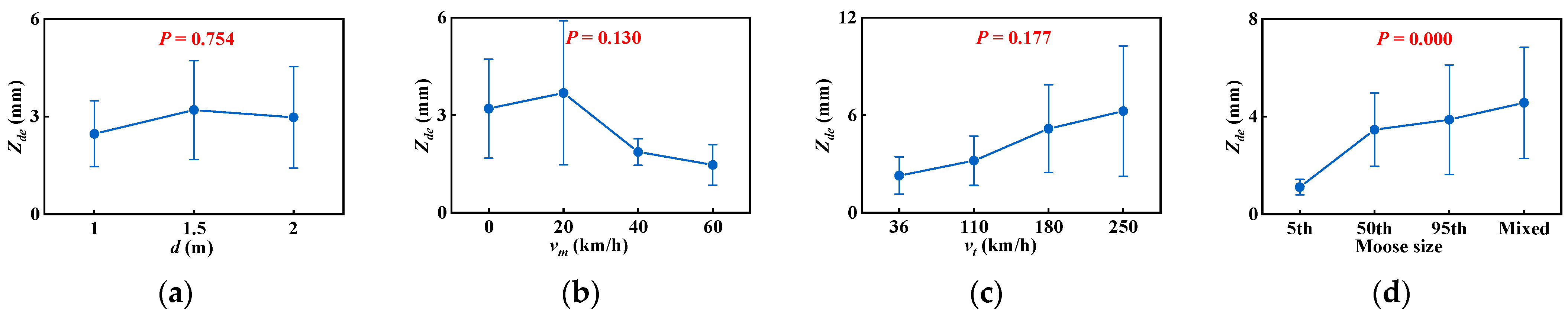
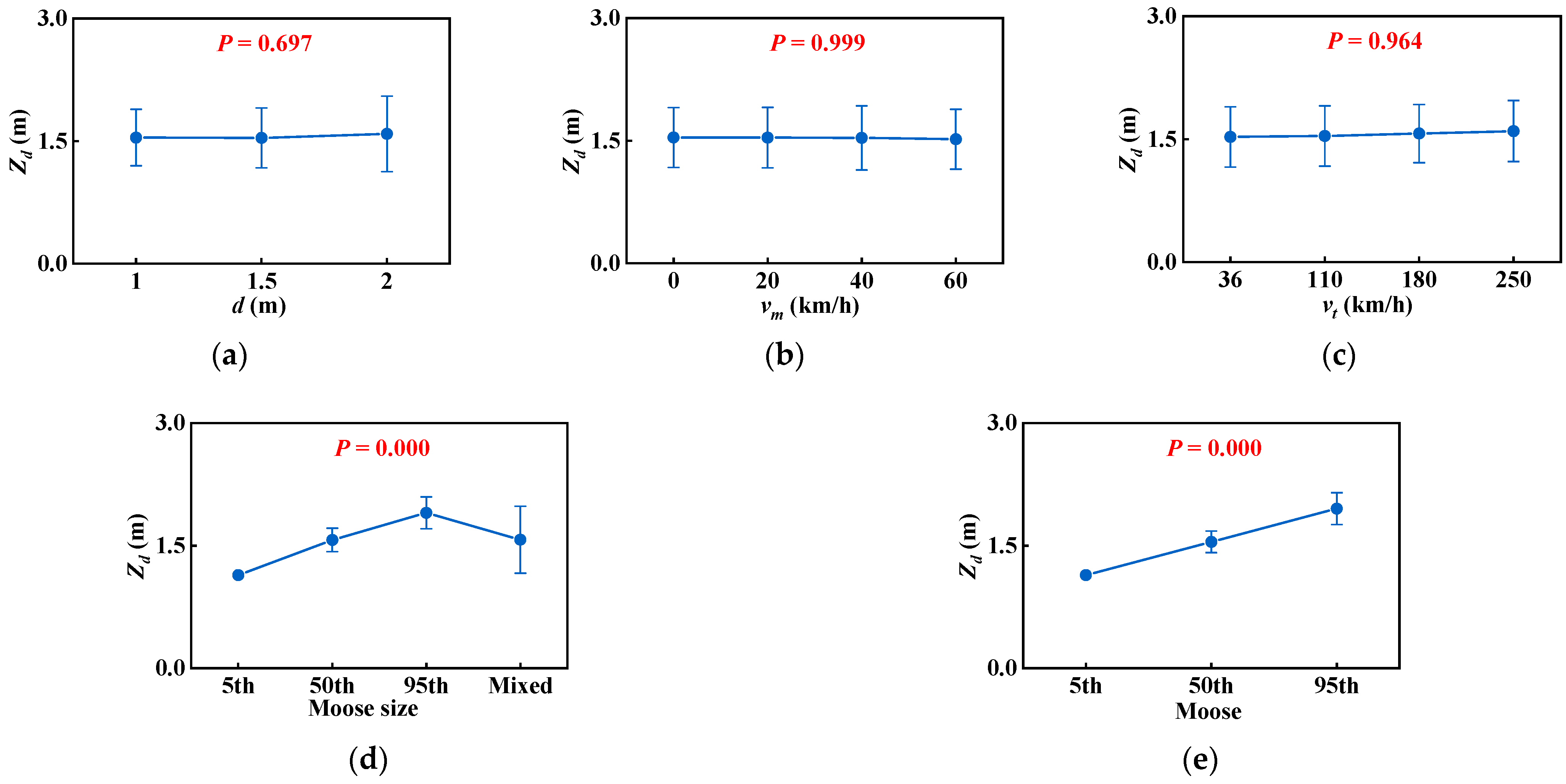
3.2.3. Wheel–Rail Response
4. Discussion
4.1. The Effect on Collision Force
4.2. The Effect on Train Derailment Indexes
4.3. The Effect on Safety Boundary Indexes
5. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tomáš, K.; Ježek, M.; Keken, Z. Mortality of large mammals on railway tracks. Sci. Agric. Bohemoslov. 2011, 4, 12–18. [Google Scholar]
- Jasinska, K.D.; Zmihorski, M.; Krauze-Gryz, D.; Kotowska, D.; Werka, J.; Piotrowska, D.; Part, T. Linking habitat composition, local population densities and traffic characteristics to spatial patterns of ungulate–train collisions. J. Appl. Ecol. 2019, 56, 2630–2640. [Google Scholar] [CrossRef]
- Jasinska, K.D.; Bijak, S.; Child, K.N.; Rea, R.V. Temporal patterns of moose–train collisions in British Columbia–implications for mitigation. Sylwan 2020, 164, 32–40. [Google Scholar] [CrossRef]
- Samar, A.S.P.; Klemen, K. Providing Wildlife Corridors In The Area Of Railway Infrastructure. Acta Silvae Et. Ligni 2023, 131, 29–46. [Google Scholar] [CrossRef]
- Backs, J.A.J.; Nychka, J.A.; St. Clair, C.C. Low audibility of trains may contribute to increased collisions with wildlife. Transp. Res. Interdiscip. Perspect. 2022, 13, 100516. [Google Scholar] [CrossRef]
- Bhardwaj, M.; Olsson, M.; Hakansson, E.; Seiler, A.; Soderstrom, P. Ungulates and trains–Factors influencing flight responses and detectability. J. Environ. Manag. 2022, 313, 114992. [Google Scholar] [CrossRef] [PubMed]
- Backs, J.A.J.; Nychka, J.A.; St. Clair, C.C. Warning systems triggered by trains increase flight–initiation times of wildlife. Transport. Res. Part D Transp. Environ. 2020, 87, 102502. [Google Scholar] [CrossRef]
- Nezval, V.; Bil, M. Spatial analysis of wildlife–train collisions on the Czech rail network. Appl. Geogr. 2020, 125, 102304. [Google Scholar] [CrossRef]
- Krauze-Gryz, D.; Zmihorski, M.; Jasinska, K.; Kwasny, L.; Werka, J. Temporal pattern of wildlife–train collisions in Poland. J. Wildl. Manag. 2017, 81, 1513–1519. [Google Scholar] [CrossRef]
- Andreassen, H.P.; Gundersen, H.; Storaas, T. The effect of scent–marking, forest clearing, and supplemental feeding on moose–train collisions. J. Wildl. Manag. 2005, 69, 1125–1132. [Google Scholar] [CrossRef]
- Jasinska, K.D.; Babinska-Werka, J.; Krauze-Gryz, D. A test of wildlife warning reflectors as a way to reduce risk of wildlife–train collisions. Nat. Conserv. 2022, 47, 303–316. [Google Scholar] [CrossRef]
- Zhang, H.; Fu, G.; Su, Y.; Yue, Y.; Zhu, W.; Zhang, C.; Lu, Y. Safety study of high–speed collisions between trains and live intruder. Sensors 2022, 228, 824. [Google Scholar] [CrossRef]
- Peng, Y.; Deng, M.; Yu, Y.; Hu, Z.; Wang, K.; Wang, X.; Yi, S.; Deng, G. Analysis of moose motion trajectory after bullet train–moose collisions. Eng. Fail. Anal. 2023, 151, 107373. [Google Scholar] [CrossRef]
- Peng, Y.; Hu, Z.; Deng, M.; Wang, K.; Yu, Y.; Che, Q.; Deng, G. High–speed Train Crash Safety Assessment for Train–Moose Collisions. Proc. Inst. Mech. Eng. Part. F J. Rail Rapid Transit. 2023; submitted. [Google Scholar]
- Gens, M. Moose Crash Test Dummy. Master’s Thesis, Swedish Nation Road and Transport Research Institute, Linköping, Sweden, 2001. [Google Scholar]
- Zhang, H.; Peng, Y.; Hou, L.; Wang, D.; Tian, G.; Li, Z. Multistage impact energy distribution for whole vehicles in high–speed train collisions: Modeling and solution methodology. IEEE Trans. Ind. Inf. 2019, 16, 2486–2499. [Google Scholar] [CrossRef]
- TASS BV. MADYMO Human Body Models Manual; TASS International: Helmond, The Netherlands, 2013. [Google Scholar]
- Cho, H.J.; Koo, J.S. A numerical study of the derailment caused by collision of a rail vehicle using a virtual testing model. Veh. Syst. Dy. 2012, 50, 79–108. [Google Scholar] [CrossRef]
- Hou, L.; Peng, Y.; Sun, D. Dynamic analysis of railway vehicle derailment mechanism in train–to–train collision accidents. Proc. Inst. Mech. Eng. Part. F J. Rail Rapid Transit. 2021, 235, 1022–1034. [Google Scholar] [CrossRef]
- Hou, L.; Peng, Y.; Sun, D. Hybrid framework for safety design of human–rail vehicle transportation system using stochastic approach and optimization. IEEE Trans. Ind. Inf. 2022, 19, 6599–6612. [Google Scholar] [CrossRef]
- Chinese Standard TB/T 2344-2012; Technical Specifications for Procurement of 43 kg/m–75 kg/m Rails. Standards Press of China: Beijing, China, 2017.
- Standard NO. GB 146.1-2020; Gauge for Standard Gauge Railways Part 1: Rolling Stock Gauge. SAMR: Beijing, China, 2020.
- Standard NO.TB 10621-2014; Code for Design of High Speed Railway. National Railways Beijing: Beijing, China, 2014.
- Yang, W.; Xie, S.; Li, H.; Chen, Z. Design and injury analysis of the seated occupant protection posture in train collision. Safety Sci. 2019, 117, 263–275. [Google Scholar] [CrossRef]
- Guo, K.; Wu, Z.; Wang, W.; Ren, S.; Zhou, X.; Gadekallu, T.R.; Luo, E.; Liu, C. GRTR: Gradient Rebalanced Traffic Sign Recognition for Autonomous Vehicles. IEEE T. Autom. Sci. Eng. 2023, 1–13. [Google Scholar] [CrossRef]
- Lian, Z.; Zeng, Q.; Wang, W.; Xu, D.; Meng, W.; Su, C. Traffic Sign Recognition using Optimized Federated Learning in Internet of Vehicles. IEEE Internet Things 2023, 1. [Google Scholar] [CrossRef]
- Deebak, B.D.; Memon, F.H.; Dev, K.; Khowaja, S.A.; Wang, W.; Qureshi, N.M. TAB-SAPP: A Trust-Aware Blockchain-Based Seamless Authentication for Massive IoT-Enabled Industrial Applications. IEEE T. Ind. Inform. 2023, 19, 243–250. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Parameter | Value Sample (Baseline Case Shown in Bracket) | |||||
|---|---|---|---|---|---|---|
| Moose size MS | 5th | 50th | 95th | mixed | ||
| (km/h) | 36 | (110) | 180 | 250 | ||
| (km/h) | (0) | 20 | 40 | 60 | ||
| Interval d (m) | 1.5 | (2.0) | 2.5 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Hu, Z.; Yu, Y.; Deng, G.; Deng, M. Passive Safety Assessment of Railroad Trains in Moose Herd Collision Scenarios. Sustainability 2024, 16, 1043. https://doi.org/10.3390/su16031043
Zhao S, Hu Z, Yu Y, Deng G, Deng M. Passive Safety Assessment of Railroad Trains in Moose Herd Collision Scenarios. Sustainability. 2024; 16(3):1043. https://doi.org/10.3390/su16031043
Chicago/Turabian StyleZhao, Shizhong, Zhengsheng Hu, Yangyang Yu, Gongxun Deng, and Min Deng. 2024. "Passive Safety Assessment of Railroad Trains in Moose Herd Collision Scenarios" Sustainability 16, no. 3: 1043. https://doi.org/10.3390/su16031043