1. Introduction
In the context of the rapid development of the global economy and the increasing population, the increasing demand for resources and the sustainable use of resources have become an important global issue. We have always relied on fossil fuels to meet our energy needs, but there are limits to how much can be obtained. In recent years, the development of new energy has exerted a great impact on the sustainable development of human society and alleviated the problem of energy sustainability to a certain extent [
1,
2]. However, wind and photovoltaic power plants are often located in remote areas, which means significant losses in the transmission process. China is a big country with a large population, so it is urgent to develop new energy to alleviate the increasingly tight energy problem. As China accelerates the transformation of its energy system to conservation and efficiency and its energy structure to a green and low-carbon transformation strategy, renewable energy sources such as wind power and solar power are developing rapidly. While energy bases are mostly located in the west and north (for example, 80% of coal resources are distributed in the northwest and 80% of hydropower resources are concentrated in the southwest), China’s energy demand center is located in the economically developed eastern provinces, whose electric energy consumption accounts for more than half of the national power generation, thus forming a pattern of inverse distribution of energy centers and load centers in China [
3]. In this context, the DC transmission technology, which is suitable for large-capacity, long-distance energy transmission and makes it easy to connect new energy to the grid, has become a research hotspot in the industry. HVDC transmission technology has become the best choice to solve this problem. The line-commutated converter high-voltage direct current (LCC-HVDC) system has the advantages of large capacity, long distance, low active power loss, etc. At present, more than ten LCC-HVDC projects have been completed and put into operation in China, forming an increasingly perfect AC-DC hybrid power grid, and some areas have formed a new pattern of DC multi-feed. It plays a crucial role in China’s power grid architecture [
4,
5].
The LCC-HVDC system takes the thyristor without self-shutdown function as the core device. When the system fails, it risks continuous commutation failure. If appropriate and timely control measures are not taken, subsequent commutation failures can occur easily, which will cause repeated power shocks to the AC system, resulting in the locking of the converter station. When the carrying capacity of the AC system is weak, the locking of the converter station may cause the transfer of active power flow, which makes the protection of the AC transmission line in normal operation malfunction, resulting in cascading faults. At the same time, the locking of the converter station causes a power imbalance in the power grid at the sending and receiving ends, which may force the system to switch the machine to reduce the load or even automatically detrain [
6]. To ensure the system’s safe and stable operation, it is crucial to investigate an effective method for suppressing these failures in communication.
Because of the problem of continuous commutation failure of the LCC-HVDC system, many theoretical analyses and experimental verifications have been carried out by scholars in China and abroad, and great results have been achieved. To be clear, faults in the inverter-side AC system are mostly caused by failures in compensating the HVDC transmission system [
7]. The authors in [
8,
9] detailed the influencing factors of commutation failure in DC systems and proposed a method to suppress commutation failure, but did not propose a detailed control strategy to suppress commutation failure. A sine–cosine component detection method based on a fast digital signal processor was proposed in [
10]. In the event of an AC system failure, this strategy intervenes to quickly determine the AC system failure and avoid the occurrence of commutation failure. Based on the voltage rms value algorithm with three samples at the same time, the author in [
11] proposes an improved predictive control strategy for commutation failure, which has more advantages in detection speed and sensitivity than [
10] and the probability of commutation failure is low. For the commutation fault detection method, a sine–cosine component detector has been proposed to measure the single-phase voltage [
12] that can quickly detect the commutation voltage. The author in [
13] suggests that the transmitter AC failure may lead to commutation failure during the recovery process of the inverter after the failure, revealing the potential mechanism of this new commutation failure phenomenon through the theoretical analysis of the different drop degrees of the commutator bus voltage on the rectifier side. Based on the theoretical analysis of different drop degrees of commutator bus voltage on the commutator side, a method has been proposed to reduce the turn-off angle by improving the instantaneous recovery of commutator bus voltage [
14]. Reference [
15] proposed a technique based on power parts. However, the approach does not mention the continuous commutation mitigation method. A DC prescient control methodology has been proposed to prevent commutation failures [
16]. Though the methods proposed in the above literature can effectively prevent the occurrence of the first commutation failure of the LCC-HVDC system, the problem of inhibiting the failure of continuous commutation still needs to be solved urgently.
In terms of suppression of commutation failure, most studies consider the addition of additional auxiliary equipment, inverter topology transformation, and control and protection. The author in [
17] proposes a new type of power grid commutator with controllable turn-off capability. Compared with the LCC-HVDC commutator, the new type of converter can actively turn off the current of the bridge arm to achieve forced commutation, provide reactive power support, and solve the commutation failure problem of a multi-feed DC system, but its topology has certain resonant risks. Reference [
18] suggested the effect of voltage source converter-based HVDC (VSC-HVDC) feeding on LCC-HVDC feeding on the same bus. The results show that VSC-HVDC increases the maximum available power, reduces TOV, and makes LCC-HVDC less prone to commutation failure. A dynamic series voltage compensator (DSVC) scheme is proposed in [
19]. The DSVC is an electrical device that helps with the commutation process in high-voltage direct current (HVDC) systems. It consists of three coordinated door-commutated thyristor (IGCT)-based full-span submodule (FBSM) chains that match the mass power transmission of the LCC-HVDC. The DSVC superimposes the transient voltage to the AC line voltage, increasing the inverter valve’s commutation margin. It is inserted between the transformer and the inverter’s AC port. The above references mainly start from the addition of additional auxiliary equipment and inverter topology transformation so as to further suppress commutation failure and continuous commutation failure. Next, we will focus on the continuous commutation failure of LCC-HVDC to suppress from the direction of the control strategy. In reference [
20], it was suggested that the control technique for the voltage-dependent current order limiter (VDCOL) slant could be changed by altering the control connection of the remuneration voltage. Reference [
21] advanced the postponement of the steady state of VDCOL and hurried the recompense recuperation. For changing the DC current request, a DC current prescient control (DCPC) was introduced in [
16]. The DCPC reduces the DC current request from the VDCOL when a potential commutation failure (CF) is detected by the CFPREV. The authors of [
22] thoroughly investigated the VDCOL parameter setting method, considering the HVDC system’s reactive power characteristics. In [
23], the authors surveyed VDCOL control methodologies, demonstrating the DC framework recuperation qualities. In [
24], a fuzzy control-based variable slope VDCOL controller was proposed. The research focus of [
25] was to optimize the VDCOL control parameters to improve the fault recovery performance of HVDC links with weak receiving AC systems. A novel VDCOL control strategy was proposed in [
26] to improve its coordination with current deviation control and further suppress commutation failures, but the effect is not obvious when severe system failures occur. Based on the low sensitivity of the traditional VDCOL DC current regulation command, a control strategy based on the nonlinear dynamic VDCOL design scheme was proposed in [
27], which is more effective in suppressing continuous commutation failures than conventional VDCOL. Reference [
28] analyzed the mechanism of subsequent commutation failure in detail and identified the improper interaction of the inverter side controller as the main inducement. It is found that after the inverter side is switched from constant current control to constant off-angle control, the rapid decrease in the output of the current deviation controller will cause the shutdown angle to be uncontrolled quickly, which may lead to subsequent commutation failure. Based on the voltage–current characteristics of VDCOL, the operating characteristics of a DC transmission system with VDCOL were analyzed in detail [
22]. On this basis, the setting of the VDCOL parameter range was analyzed by taking the VDCOL parameter and AC bus voltage as the independent variable and the reactive power exchange of the DC converter station as the dependent variable. Based on the transmutation mechanism of traditional DC transmission, the concept of a virtual inductor is introduced in [
29], which is combined with VDCOL control to suppress the continuous commutation failure of multi-feed systems. Reference [
30] proposes a virtual resistor current-limiting control method that can suppress the continuous commutation failure of traditional DC transmission. The proposed virtual resistor current limit controller can suppress the continuous communication failure of the HVDC system in the case of single-phase fault and three-phase fault to a certain extent, so its fault recovery characteristics can be improved.
Based on the above analysis, this paper proposes a joint control strategy for sup-pressing commutation failure by fusing turn-off angle compensation and dynamic nonlinear VDCOL. This work’s main contributions are highlighted as follows.
(1) The traditional LCC-HVDC system adopts linear VDCOL on the inverter side. When AC failure occurs on the inverter side of the system, VDCOL will be put into operation when the DC voltage drops to the setting value due to the characteristics of linear regulation. However, the conventional VDCOL cannot adapt to severe faults, which makes it difficult to recover the AC voltage and DC current of the inverter station and cannot inhibit continuous commutation failure. A dynamic nonlinear VDCOL control strategy is proposed for the low sensitivity of current command adjustment under conventional VDCOL control. The dynamic nonlinear VDCOL control method proposed in this paper can obtain a smaller DC current command value at the same DC voltage, thus speeding up the DC current command regulation and realizing the rapid constraint of DC current and the effective suppression of continuous commutation failure. At the same time, when the DC voltage reaches a higher level, the current can reach a higher DC current instruction value and increase at a faster rate. The reactive power consumption of the DC system can be reduced rapidly, and the voltage recovery ability of the system can be improved.
(2) When the commutator fails due to an AC system fault, the DC current will increase, resulting in a decrease in the turn-off angle. When the turn-off angle is lower than the limited turn-off angle, a commutation failure will occur in the DC system. Therefore, the concept of the virtual inductor is introduced, which can sense the DC current change rate in real time and control the fixed turn-off angle. Finally, a control strategy based on virtual inductance dynamic compensation of the turn-off angle is proposed to ensure that the turn-off angle has a sufficient commutation margin during fault recovery to avoid continuous commutation failure of the system.
2. Mechanism Analysis of the LCC-HVDC Commutation Process
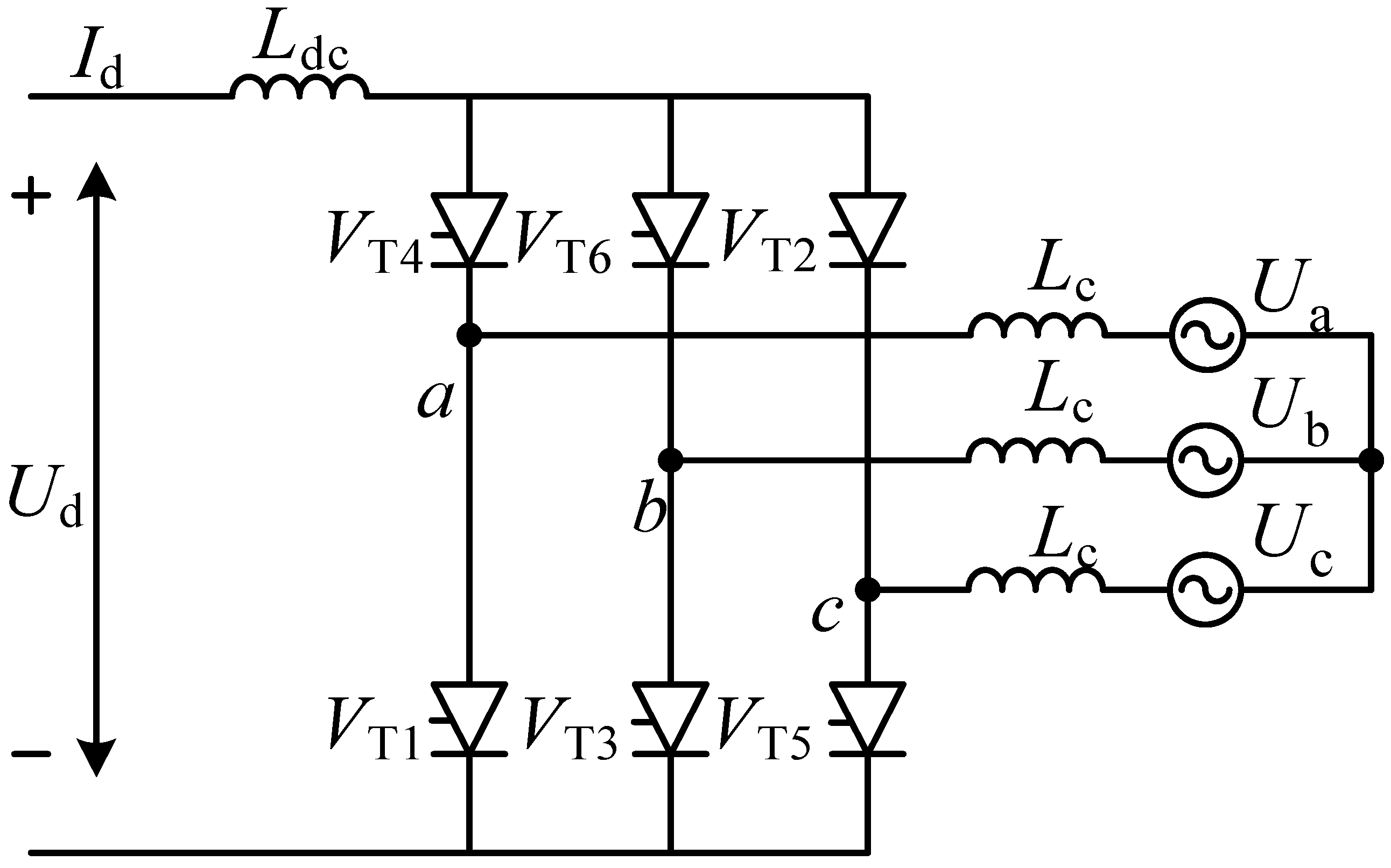
A single-bridge inverter is shown in
Figure 1 [
1]. Under the power frequency condition of 50 Hz, there is one thyristor on the upper and lower bridge arms during normal operation. When the inverter starts commutation, one of the thyristors of the upper arm or lower arm of the inverter that has been turned on will be turned off, the thyristors in the shutdown state will be turned on in order, and the process of alternate conduction of the thyristors in the upper and lower bridge arms is the commutation process [
2].
During normal operation, the six valve arms of the six-pulse inverter will be turned on by the trigger pulse in order, and this article will start the analysis with the situation of the on state, where it can be seen that the next cycle will be converted to the state of simultaneous conduction. Before the valve is opened, only two valves are turned on, and now when the valve is triggered, they are all turned on at the same time. The equivalent circuit is shown in
Figure 2b [
3].
The equivalent circuit is shown in
Figure 2b, In order to quantitatively analyze the LCC commutation process, assume that the current flowing through
in the commutation process is
and the current flowing through
is
, and at the same time, the direction of the current flow from the thyristor anode to the cathode is positive. The Kirchhoff voltage equation for phase B and phase C of the commutation branch in parallel is shown in Equation (1):
DC current satisfies Equation (2) in the commutation process:
Because of commutation reactance, it is considered that the DC current remains constant during commutation, and Equation (1) is integrated:
giving the solution:
Further simplification of Equation (4) yields the mathematical expression of the off angle as follows [
30]:
It can be seen from Equation (5) that the size of the arc extinguishing angle is closely related to the AC voltage, DC current, leading trigger angle, and equivalent commutation reactance. In the case of the constant, only the ratio will affect the on state. The essence of commutation failure is that it is less than its intrinsic limit value, i.e., the ratio is too large to cause the value to be too small. Therefore, excessive current and AC voltage drop are the most important reasons for continuous commutation failure.
6. Conclusions
Based on the problem of continuous commutation failure when an AC fault occurs on the inverter side of an LCC-HVDC system, this paper studies the mechanism of continuous commutation failure from multiple perspectives and designs a new multi-objective cooperative control method based on this to effectively suppress continuous commutation failure. The control strategy considers the low sensitivity of the DC current command of the conventional VDCOL in the LCC-HVDC system and the problem that the rapid rise of DC current and the decrease of commutation voltage during the fault will lead to the decrease of the shutdown angle. Through theoretical and simulation analysis, the following conclusions can be obtained.
(1) Because of the low sensitivity of current command regulation under the conventional VDCOL control mode, a dynamic nonlinear VDCOL control method is designed, in which a new mathematical model is proposed to change the operation characteristics of the conventional VDCOL voltage and current fixation. Firstly, the voltage before and after the commutation failure is dynamically adjusted by the degree of AC voltage drop, and considering the variable voltage before and after the commutation failure, the failure coefficient is introduced to modify the voltage. Secondly, the conventional VDCOL is designed as a nonlinear control structure and the DC current command is reasonably regulated. Compared to traditional VDCOL, dynamic nonlinear VDCOL control has better immunity to single-phase ground faults. The nonlinear dynamic VDCOL control proposed in this paper can effectively suppress the increase in DC current to improve the stability of the system. At the same time, the shutdown angle compensation mechanism based on virtual inductance is introduced to improve the commutation margin of the shutdown angle, which effectively solves the problem that VDCOL cannot suppress the commutation failure when a three-phase grounding fault occurs.
(2) The joint control method proposed in this paper is only for the VDCOL components in the control system, is more compatible with other optimal control strategies, and does not require additional auxiliary equipment, making it cheaper and easier to implement. In addition, a shut-off angle compensation control strategy based on virtual inductance is proposed, which is also a control method in the control link, not the real inductance, which reduces the hardware investment and site occupation. This is adaptable, economical, and practical.
(3) This method can more effectively reduce the possibility of continuous commutation failure of the LCC-HVDC system under various fault levels, shorten the recovery time of the LCC-HVDC system under faults, and make the system enter the stable operation mode faster, which has obvious advantages compared with the conventional control mode. The continuous commutation failure suppression strategy proposed in this study by fusing turn-off angle compensation and dynamic nonlinear VDCOL provides a new idea for preventing and suppressing commutation faults, significantly reduces the transmission loss caused by renewable energy access to the power grid, alleviates the energy sustainability problem to a certain extent, and has important theoretical guiding significance for the planning and operation of an HVDC system.
(4) The electrical quantity related to the system has certain fluctuations in the transient process of fault recovery, the low-pass filtering method is used to smooth out the influence of the above fluctuations on the shutdown angle compensation, and the filter parameter design needs to be further studied in the future. The commutation failure can be suppressed by control measures such as early triggering and adjusting the DC current command value, but the suppression measures are independent of one another and their response times are different. Future research should examine the coordinated control and coordination strategies of different commutation failures and clarify the interaction between different control measures.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}