
Collaborative Control of Reactive Power and Voltage in a Coupled System Considering the Available Reactive Power Margin
Abstract
1. Introduction
2. Collaborative Optimization Decomposition Model for the Coupled System
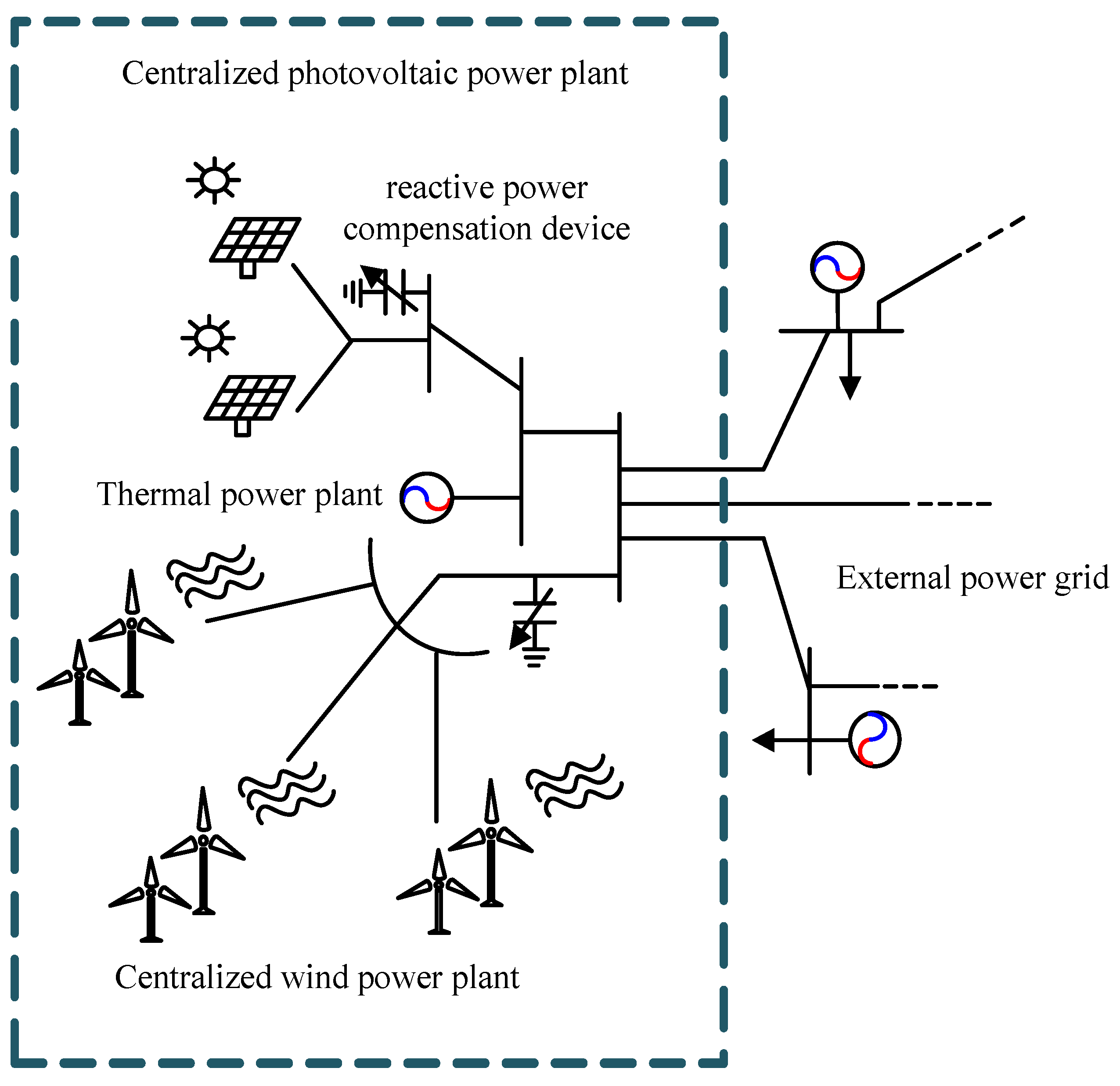
2.1. Spatial Distribution Characteristics of the Coupled System
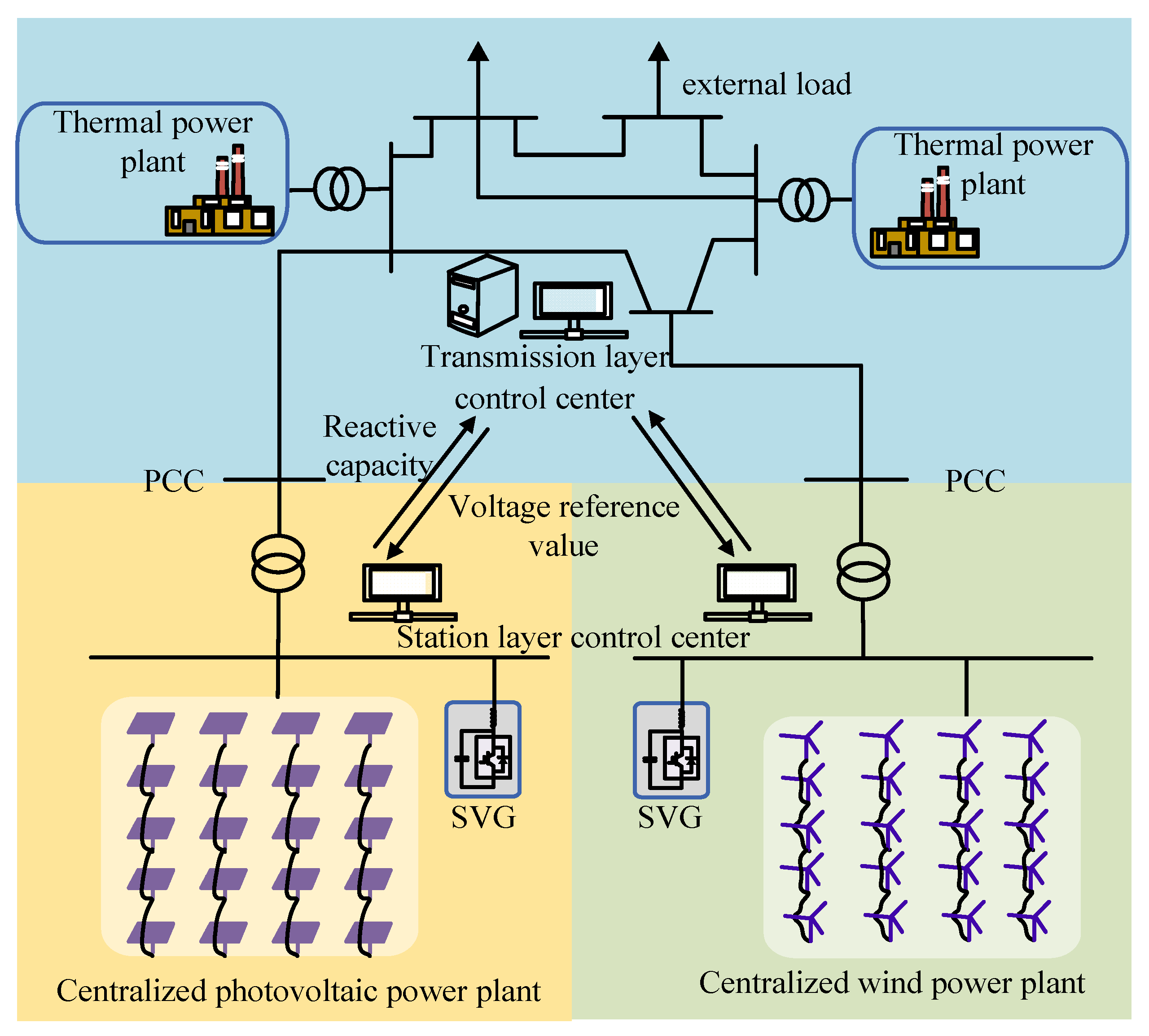
2.2. Collaborative Optimization Control Structure of the Coupled System
3. Collaborative Reactive Power Optimization Control of the Coupled System
3.1. Predictive Model Based on Sensitivity Theory
3.2. Optimization Model of the Transmission Layer
3.2.1. Transmission Layer Objective Function
3.2.2. Constraints of the Transmission Layer
- (1)
- Node voltage safety constraints:
- (2)
- Power output constraints of thermal power plants:
- (3)
- Station transmission reactive power constraint:
3.3. Optimization Model for the Station Layer
3.3.1. Initial Reactive Power Demand Allocation at the Station Layer
3.3.2. Station Layer Objective Function
3.3.3. Station Layer Constraints
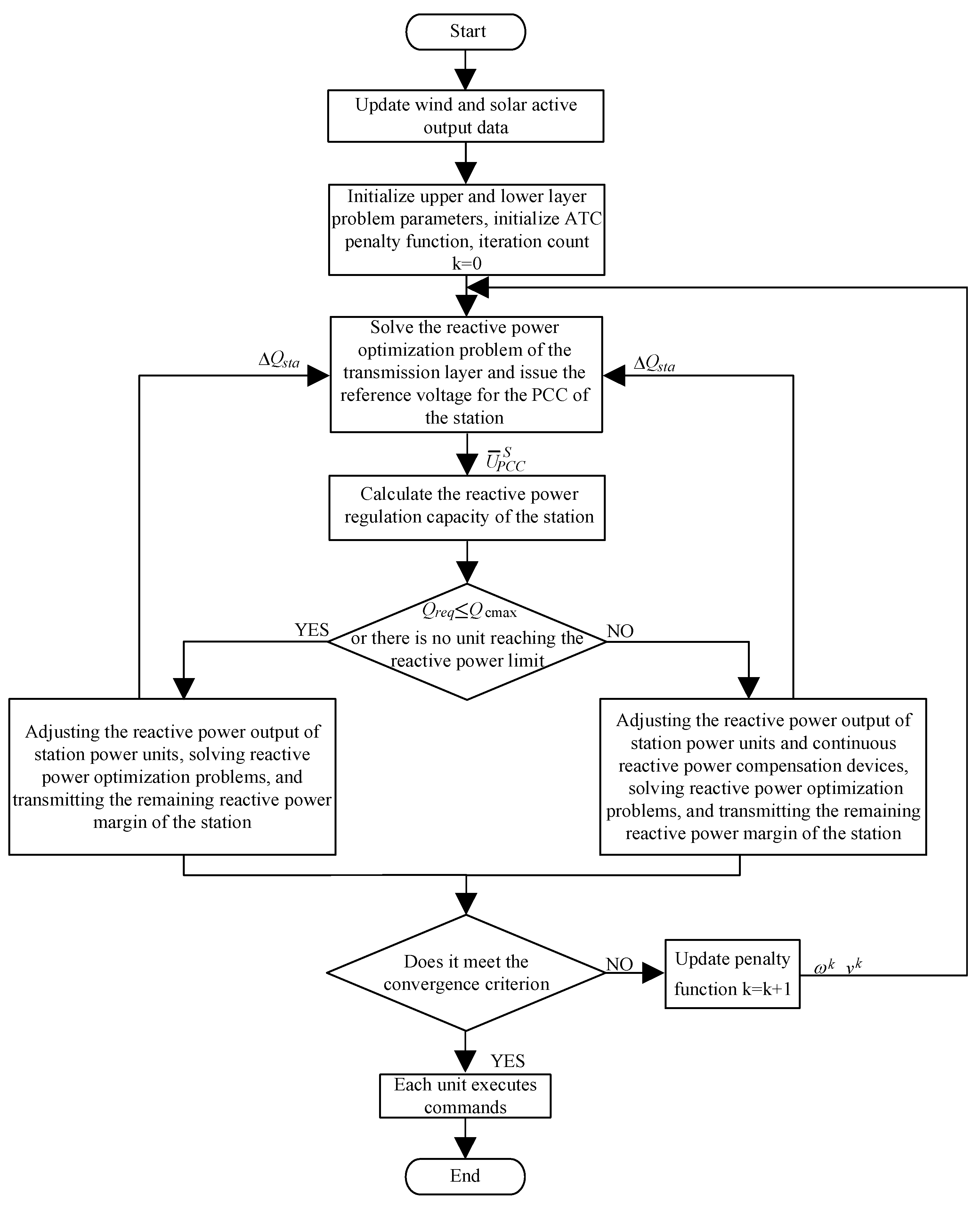
4. Collaborative Reactive Power Optimization Method for the Coupled System
5. Results and Discussion
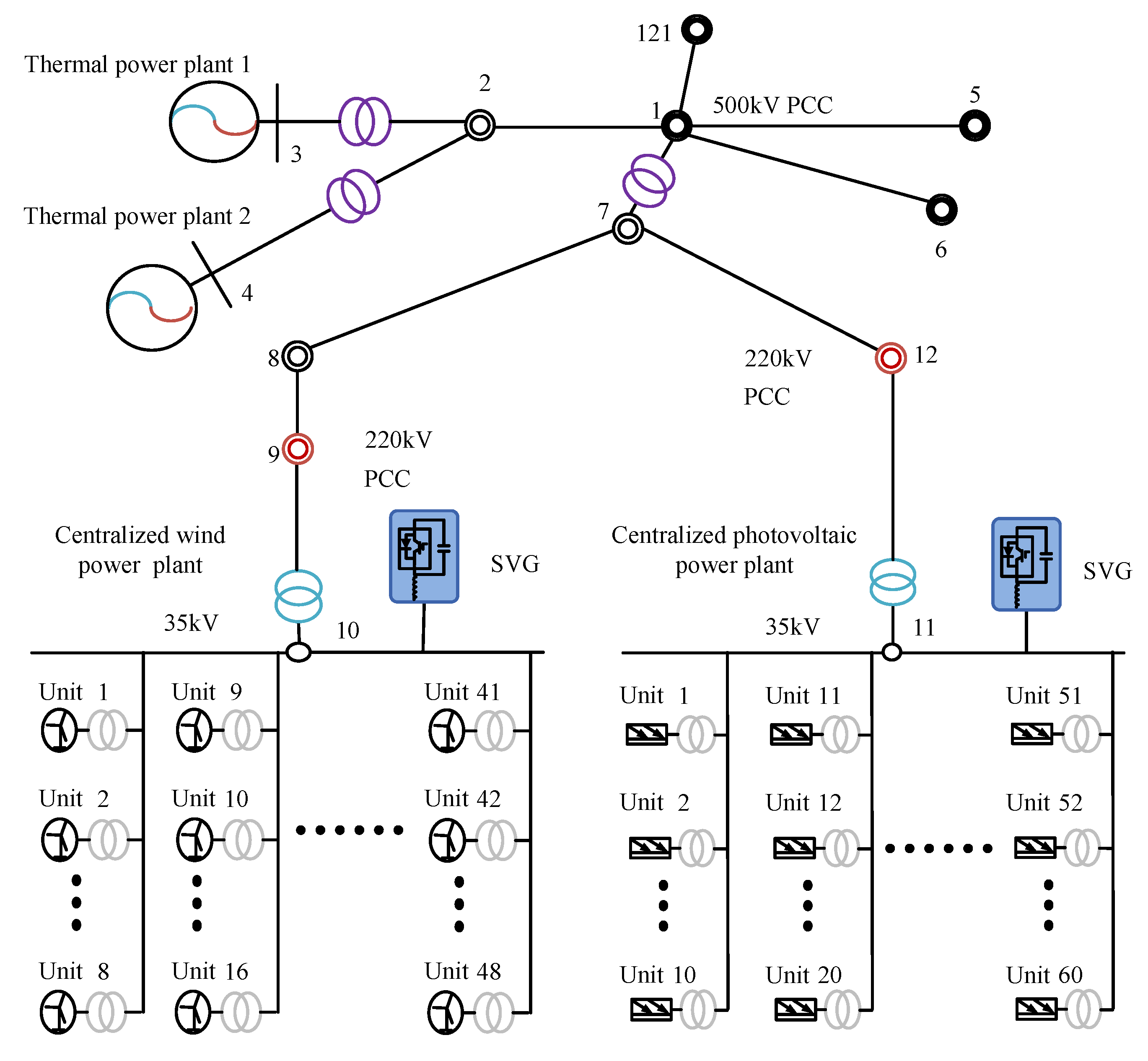
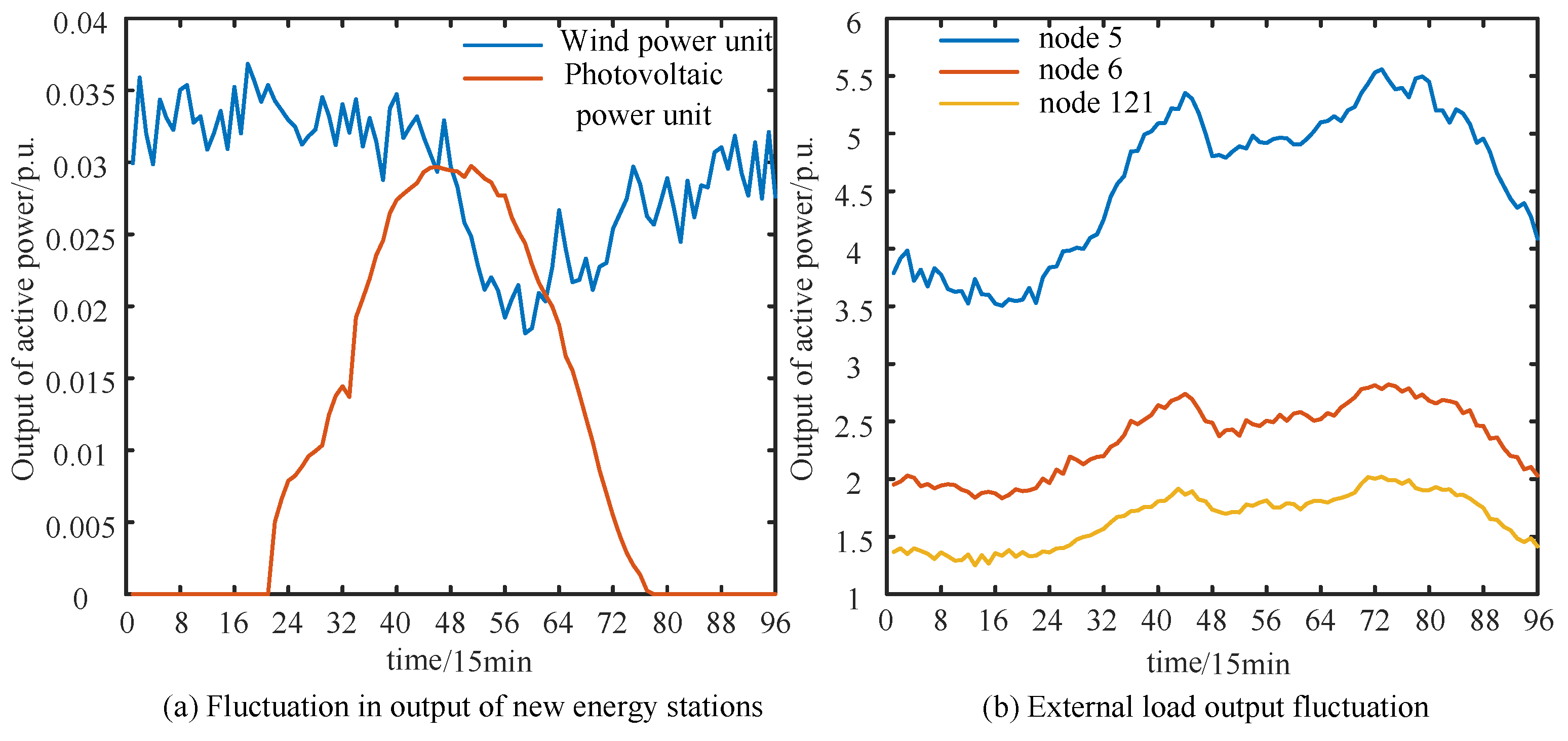
5.1. Example Description
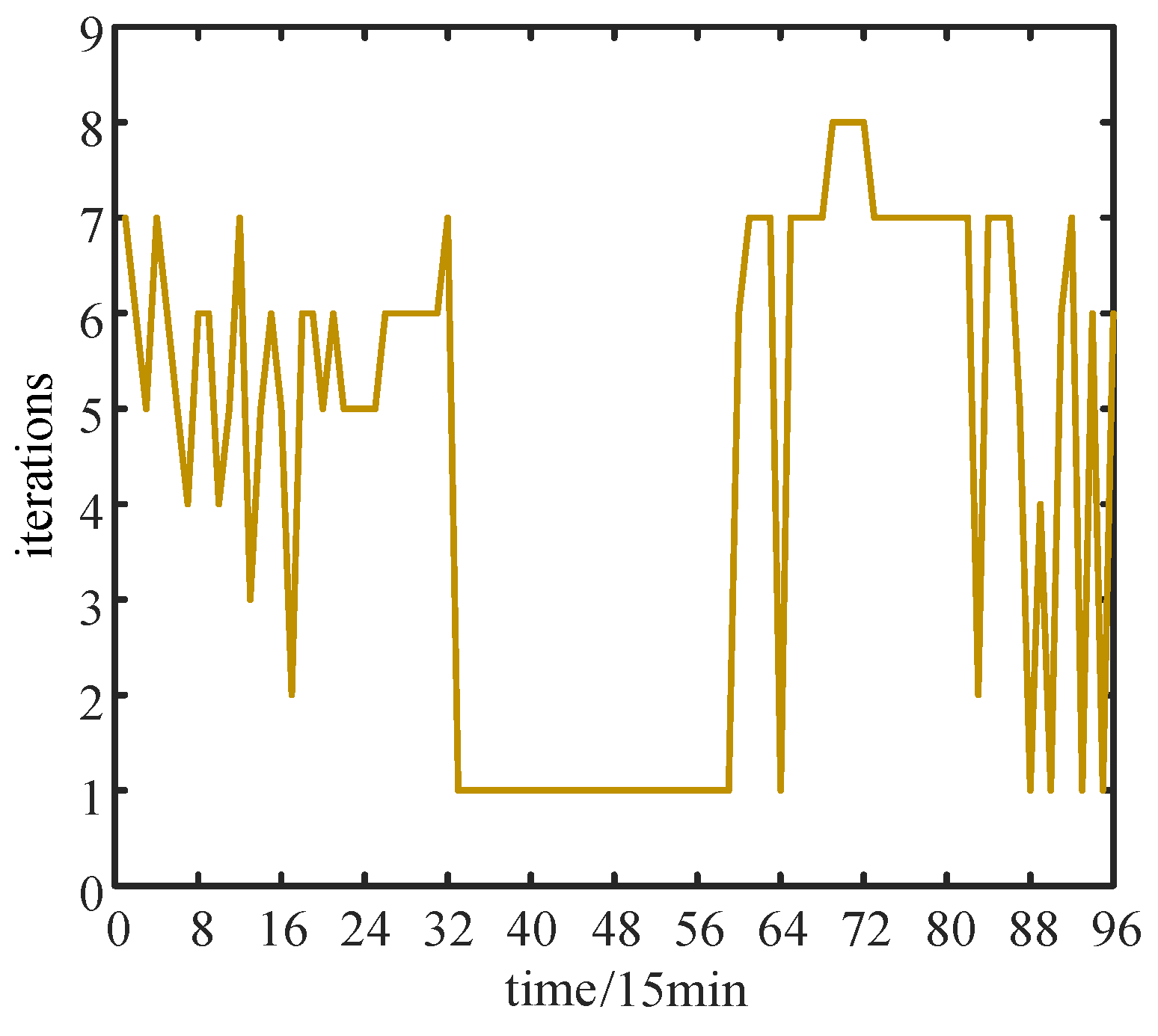
5.2. Performance Analysis of Distributed Reactive Power Optimization
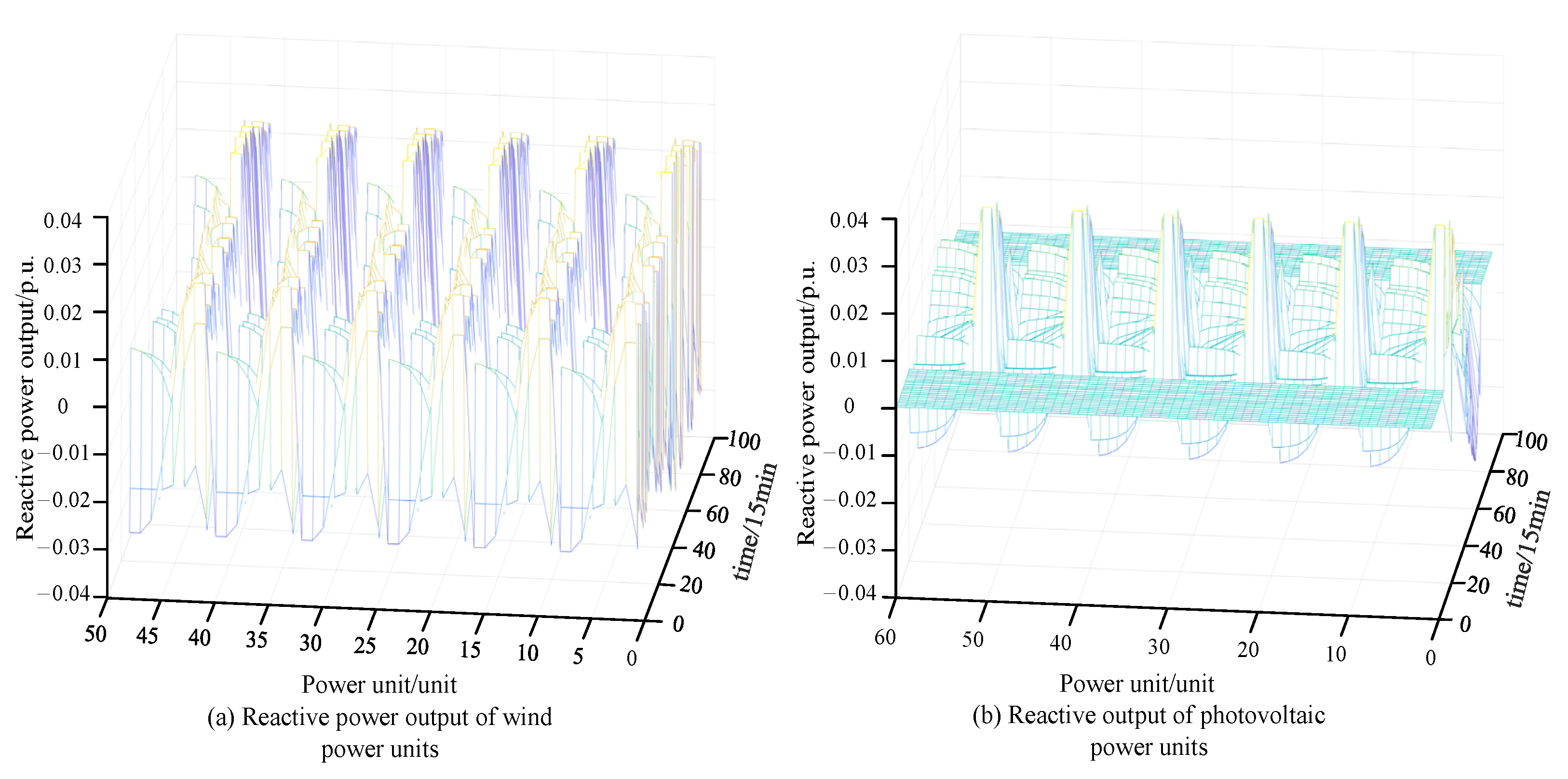
5.3. Analysis of Reactive Power Resource Output in the Coupled System
6. Conclusions
- (1)
- By using the target cascade method for voltage hierarchical collaborative control of the coupled system, the coupled system is divided into multiple sub-optimization control problems based on physical hierarchical characteristics, reducing model size and solving difficulty.
- (2)
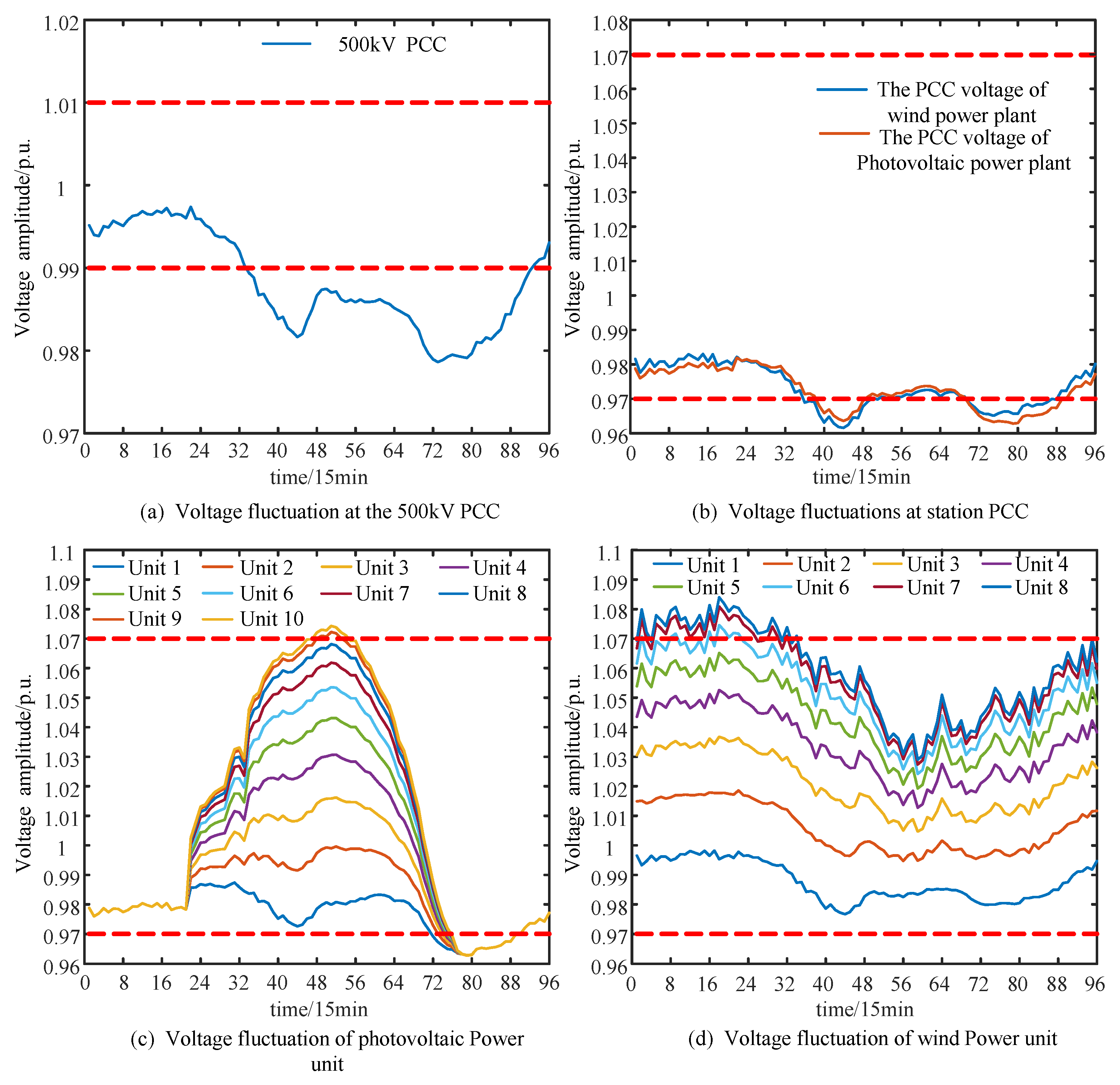
- Adopting different voltage standards for different regions can effectively ensure the safety of voltage operation within the coupled system and reduce network losses to a certain extent.
- (3)
- Considering the characteristics of reactive power resources within the new energy station, the adjustable reactive power margin of the continuous reactive power compensation device is ensured while fully utilizing the reactive power regulation capacity of the power units of the new energy station.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Angizeh, F.; Bae, J.; Chen, J.; Klebnikov, A.; Jafari, M.A. Impact Assessment Framework for Grid Integration of Energy Storage Systems and Renewable Energy Sources Toward Clean Energy Transition. IEEE Access 2023, 11, 134995–135005. [Google Scholar] [CrossRef]
- Yang, L.; Zhou, N.; Zhou, G.; Chi, Y.; Chen, N.; Wang, L.; Wang, Q.; Chang, D. Day-ahead Optimal Dispatch Model for Coupled System Considering Ladder-type Ramping Rate and Flexible Spinning Reserve of Thermal Power Units. J. Mod. Power Syst. Clean Energy 2022, 10, 1482–1493. [Google Scholar] [CrossRef]
- Yu, L.; Zhang, L.; Meng, G.; Zhang, F.; Liu, W. Research on Multi-Objective Reactive Power Optimization of Power Grid with High Proportion of New Energy. IEEE Access 2022, 10, 116443–116452. [Google Scholar]
- Zhao, J.; Zhang, M.; Zhao, B.; Du, X.; Zhang, H.; Shang, L.; Wang, C. Integrated Reactive Power Optimisation for Power Grids Containing Large-Scale Wind Power Based on Improved HHO Algorithm. Sustainability 2023, 15, 12962. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, L.; Hu, M.; Tang, X.; Li, T.; Ji, S. Voltage prevention and emergency coordinated control strategy for photovoltaic power plants considering reactive power allocation. Elect. Power Syst. Res. 2018, 163, 110–115. [Google Scholar] [CrossRef]
- Solanki, N.; Patel, J. Utilization of PV solar farm for grid voltage regulation during night, analysis & control. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–5. [Google Scholar]
- Zhao, J.; Li, L.; Yu, J.; Li, Z. An Improved Marine Predators Algorithm for Optimal Reactive Power Dispatch with Load and Wind-Solar Power Uncertainties. IEEE Access 2022, 10, 126664–126673. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.-L.; Ding, D.; Zhang, X.-M.; Ning, B. A survey on recent advances in distributed sampled-data cooperative control of multi-agent systems. Neuro Comput. 2017, 275, 1684–1701. [Google Scholar] [CrossRef]
- Li, N.; Marden, J.R. Decoupling coupled constraints through utility design. IEEE Trans. Autom. Control 2014, 59, 2289–2294. [Google Scholar] [CrossRef]
- Patari, N.; Venkataramanan, V.; Srivastava, A.; Molzahn, D.K.; Li, N.; Annaswamy, A. Distributed Optimization in Distribution Systems: Use Cases, Limitations, and Research Needs. IEEE Trans. Power Syst. 2022, 37, 3469–3481. [Google Scholar] [CrossRef]
- Ruan, H.; Gao, H.; Liu, Y.; Wang, L.; Liu, J. Distributed Voltage Control in Active Distribution Network Considering Renewable Energy: A Novel Network Partitioning Method. IEEE Trans. Power Syst. 2020, 35, 4220–4231. [Google Scholar] [CrossRef]
- Li, H.; Lekić, A.; Li, S.; Jiang, D.; Guo, Q.; Zhou, L. Distribution Network Reconfiguration Considering the Impacts of Local Renewable Generation and External Power Grid. IEEE Trans. Ind. Appl. 2023, 59, 7771–7788. [Google Scholar] [CrossRef]
- Li, M. Generalized Lagrange Multiplier Method and KKT Conditions with an Application to Distributed Optimization. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 252–256. [Google Scholar] [CrossRef]
- Chai, Y.; Guo, L.; Wang, C.; Liu, Y.; Zhao, Z. Hierarchical Distributed Voltage Optimization Method for HV and MV Distribution Networks. IEEE Trans. Smart Grid 2020, 11, 968–980. [Google Scholar] [CrossRef]
- Sun, H.; Guo, Q.; Zhang, B.; Guo, Y.; Li, Z.; Wang, J. Master-slave-splitting based distributed global power flow method for integrad transmission and distribution analysis. IEEE Trans. Smart Grid 2015, 6, 1484–1492. [Google Scholar] [CrossRef]
- Cohen, G. Auxiliary problem principle and decomposition of optimization problems. J. Optim. Theory Appl. 1980, 32, 277–305. [Google Scholar] [CrossRef]
- Wang, P.; Wu, Q.; Huang, S.; Li, C.; Zhou, B. ADMM-based Distributed Active and Reactive Power Control for Regional AC Power Grid with Wind power plants. J. Mod. Power Syst. Clean Energy 2022, 10, 588–596. [Google Scholar] [CrossRef]
- Di Fazio, A.R.; Risi, C.; Russo, M.; De Santis, M. Distributed Voltage Optimization based on the Auxiliary Problem Principle in Active Distribution Systems. In Proceedings of the 55th International Universities Power Engineering Conference (UPEC), Turin, Italy, 1–4 September 2020; pp. 1–6. [Google Scholar]
- Zheng, W.; Wu, W.; Zhang, B.; Sun, H.; Liu, Y. A Fully Distributed Reactive Power Optimization and Control Method for Active Distribution Networks. IEEE Trans. Smart Grid 2016, 7, 1021–1033. [Google Scholar] [CrossRef]
- Šulc, P.; Backhaus, S.; Chertkov, M. Optimal distributed control of reactive power via the alternating direction method of mul⁃ tipliers. IEEE Trans Energy Convers. 2014, 29, 968–977. [Google Scholar] [CrossRef]
- Du, P.; Chen, Z.; Chen, Y.; Ma, Z.; Ding, H. A bi-level linearized dispatching model of active distribution network with multi-stakeholder participation based on analytical target cascading. IEEE Access 2019, 7, 154844–154858. [Google Scholar] [CrossRef]
- Ji, X.; Zhang, X.; Yu, Y.; Zhang, Y.; Yang, M.; Liu, J. Coordinated Optimal Dispatch of Transmission and Distribution Power Systems Considering Operation Flexibility of Integrated Energy System. Autom. Electr. Power Syst. 2022, 46, 29–40. [Google Scholar]
- Zhao, Y.; Wu, Z.; Qian, Z.; Gu, W.; Li, D.; Liu, Y. Distributed Optimal Dispatch of Active Distribution Network Considering Source-Load Temporal and Spatial Correlations. Dianli Xitong Zidonghua/Autom. Electr. Power Syst. 2019, 43, 68–76. [Google Scholar]
- Wu, M.; Wan, C.; Song, Y.; Wang, L.; Jiang, Y.; Wang, K. Hierarchical Autonomous Optimal Dispatching of District Integrated Heating and Power System with Multi-energy Microgrids. Dianli Xitong Zidonghua/Autom. Electr. Power Syst. 2021, 45, 20–29. [Google Scholar]
- Hiskens, I.A.; Pai, M.A. Power system applications of trajectory sensitivities. In Proceedings of the 2002 IEEE Power Engineering Society Winter Meeting, New York, NY, USA, 27–31 January 2002; pp. 1200–1205. [Google Scholar]
- Li, H.; Mao, M.; Guo, K.; Hao, G.; Zhou, L. A decentralized optimization method based two-layer Volt-Var control strategy for the integrated system of centralized PV plant and external power grid. J. Clean. Prod. 2022, 278, 123625. [Google Scholar] [CrossRef]
- Talgorn, B.; Kokkolaras, M. Compact implementation of nonhierarchical analytical target cascading for coordinating distributed multidisciplinary design optimization problems. Struct. Multidiscip. Optim. 2017, 56, 1597–1602. [Google Scholar] [CrossRef]
- Michelena, N.; Park, H.; Papalambros, P.Y. Convergence properties of analytical target cascading. AIAA J. 2002, 41, 897–905. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title 1 | Before Regulation (p.u.) | After Regulation (p.u.) |
|---|---|---|
| Transmission layer | 28.6719 | 28.5004 |
| Wind power plant | 9.0037 | 9.9893 |
| Photovoltaic power plant | 3.8966 | 4.0388 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Guo, D.; Liu, C.; Gu, Y.; Duan, Y.; Li, Y. Collaborative Control of Reactive Power and Voltage in a Coupled System Considering the Available Reactive Power Margin. Sustainability 2024, 16, 2627. https://doi.org/10.3390/su16072627
Li J, Guo D, Liu C, Gu Y, Duan Y, Li Y. Collaborative Control of Reactive Power and Voltage in a Coupled System Considering the Available Reactive Power Margin. Sustainability. 2024; 16(7):2627. https://doi.org/10.3390/su16072627
Chicago/Turabian StyleLi, Jiahe, Dongbo Guo, Chuang Liu, Yichen Gu, Yonglin Duan, and Yangyang Li. 2024. "Collaborative Control of Reactive Power and Voltage in a Coupled System Considering the Available Reactive Power Margin" Sustainability 16, no. 7: 2627. https://doi.org/10.3390/su16072627
APA StyleLi, J., Guo, D., Liu, C., Gu, Y., Duan, Y., & Li, Y. (2024). Collaborative Control of Reactive Power and Voltage in a Coupled System Considering the Available Reactive Power Margin. Sustainability, 16(7), 2627. https://doi.org/10.3390/su16072627