1. Introduction
The ambitious vision of colonizing Mars and other planets [
1] necessitates the development of advanced infrastructure to support human activities, among which transportation plays a key role. The harsh Martian environment, characterized by vast distances, extreme temperatures, and a thin atmosphere, presents unique challenges for the design and implementation of transportation systems. Efficient and reliable transport is essential for connecting habitats, research facilities, and resource extraction sites, thereby ensuring the sustainability of Martian settlements.
In the quest for suitable transportation solutions, two concepts emerge as frontrunners: ground-based magnetically levitated (maglev) trains and low-orbital spaceplanes. Maglev trains, leveraging magnetic levitation technology, promise high-speed ground transportation with minimal friction and wear, making them an attractive option for the Martian surface. On the other hand, spaceplanes offer the advantage of rapid transit between distant points on Mars, bypassing geographical barriers and potentially reducing travel time significantly.
This study aims to conduct a comparative analysis of these two transportation systems, focusing on their energy consumption, construction and operational costs, and environmental impacts within the Martian context. Additionally, the research explores the strategic implications of each system’s integration into the broader infrastructure network of Martian colonies. By employing simulation models and Monte Carlo simulations, the study assesses the feasibility, efficiency, and sustainability of maglev trains and spaceplanes, providing insights that could guide future investments and development plans for Martian transportation infrastructure.
The choice between maglev trains and spaceplanes extends beyond technical and financial considerations, touching on broader questions of long-term sustainability, adaptability to Martian conditions, and the strategic vision for the colonization of the Red Planet. As such, this comparative study not only contributes to the ongoing discourse on space colonization logistics but also aims to offer a foundation for informed decision making in the planning and development of Martian transportation systems.
The vision of colonizing Mars challenges humanity to develop advanced infrastructure capable of supporting human activities on the Red Planet. Among these, transportation infrastructure plays a key role in connecting habitats, facilitating resource distribution, and enabling scientific exploration. This study provides a comprehensive evaluation of two primary transportation systems proposed for Martian colonies: ground-based maglev trains and low-orbital spaceplanes. Additionally, we extend our analysis to include emerging transportation technologies such as hyperloop systems, drones, and rovers, employing dynamic environmental modeling and reinforcement learning (RL) for autonomous navigation.
This research aims to assess these transportation systems within the Martian context, focusing on energy consumption, construction and operational costs, environmental impacts, and their strategic integration into Martian colonies’ broader infrastructure networks. By leveraging simulation models and Monte Carlo simulations, our analysis offers insights into the feasibility, efficiency, and sustainability of maglev trains and spaceplanes, alongside the exploration of alternative transportation methods.
Our findings reveal that maglev trains, despite their higher initial construction costs, offer energy efficiency and sustainability for surface transportation on Mars. In contrast, spaceplanes, characterized by their rapid transit capabilities and lower upfront infrastructure demands, present a flexible solution for early colonization efforts despite higher operational energy consumption. Further investigation into hyperloop systems, drones, and rovers introduces dynamic environmental modeling and RL as essential components for autonomous exploration and transportation, broadening the scope of viable transportation solutions on Mars.
The study highlights the importance of a multimodal transportation strategy that combines the strengths of each system to support the sustainable growth and development of Martian settlements. Our research contributes a foundational framework for future strategic planning in Martian transportation infrastructure, highlighting the need for balanced investment in technologies that align with Martian colonization goals. The integration of RL for autonomous navigation further enriches the analysis, showcasing the potential for advanced autonomy in enhancing the operational efficiency of drones and rovers on the Martian surface.
Following the introduction, the structure of this paper is organized as follows:
Section 2 provides a comprehensive review of the existing literature and prior research, highlighting the advancements and challenges in the development of transportation infrastructure for Martian colonies.
Section 3 outlines our research methodology, detailing the energy consumption modeling, cost analysis using Monte Carlo simulations, and environmental impact assessment employed to compare maglev trains and spaceplanes. In
Section 4, we present the findings of our comparative analysis, showcasing the energy efficiency, cost implications, and environmental impacts of each transportation option.
Section 5 explores alternative modes of navigation on Mars, focusing on the potential of rovers and drones equipped with reinforcement learning (RL) algorithms for autonomous exploration and transportation.
Section 6 delves into the strategic implications of our research, discussing the trade-offs between maglev trains and spaceplanes, and the importance of a multimodal transportation approach for Martian colonies. Subsequently,
Section 7 addresses the challenges and opportunities associated with developing transportation infrastructure on Mars, emphasizing the need for international collaboration, advanced manufacturing capabilities, and the establishment of a robust communication network. Finally,
Section 8 summarizes the key takeaways from our study, highlighting the contributions to the field and suggesting avenues for further research to advance the development of sustainable and efficient transportation systems for the colonization of Mars.
2. Related Works
The concept of establishing sustainable transportation infrastructure on Mars has gained considerable attention in recent years, driven by advancements in space technology and the growing interest in extraterrestrial colonization. Several studies and proposals have laid the groundwork for understanding the challenges and opportunities associated with Martian transport systems.
Maglev Trains on Mars: The application of magnetic levitation technology for Martian transportation was studied in [
2], emphasizing its potential for reducing wear and operational costs in the abrasive Martian environment. Further theoretical models have explored the energy efficiency and feasibility of constructing maglev systems [
3] on Mars, considering the planet’s unique geological and atmospheric conditions.
Low-Orbital Spaceplanes: The concept of using spaceplanes for intra-Martian travel has been explored in the works of [
4,
5], highlighting the advantages of rapid transit and minimal surface infrastructure. NASA and SpaceX have contributed to the practical considerations of designing spaceplanes capable of withstanding Martian atmospheric entry and landing, focusing on the balance between speed, payload capacity, and energy consumption.
Sustainability and Environmental Impact: The sustainability of transportation systems on Mars has been a key concern, with studies by [
6] investigating the environmental impacts of construction and operation. Researchers have proposed models for assessing the carbon footprint and ecological disturbance of transportation infrastructure on Mars, advocating for the integration of renewable energy sources and low-impact construction techniques.
Strategic Planning for Martian Colonization: The strategic importance of transportation in the broader context of Martian colonization was discussed in the work of [
7], which examined the role of transport networks in supporting habitat expansion, resource distribution, and scientific exploration. Collaborative efforts between NASA, SpaceX, and international partners have underscored the need for interoperable and scalable transportation solutions that align with long-term settlement goals.
Utilization of Rovers in Martian Exploration: The deployment of rovers for Martian exploration represents a cornerstone of our current understanding of the Red Planet. Studies such as [
8] detail the design and performance of autonomous navigation systems based on rover platforms, leveraging smallsat constellations for enhanced navigation and communication capabilities. This approach underlines the critical role of rovers in conducting detailed geological surveys, atmospheric analysis, and search for signs of past life, thereby providing invaluable data to inform future colonization efforts. Furthermore, the advancement in autonomous navigation technologies, as discussed in [
9], highlights the evolving capabilities of rovers to traverse and analyze the Martian terrain independently, significantly expanding the scope of exploration beyond landing sites.
The Advent of Drones for Aerial Exploration: Complementing ground-based exploration, the potential for drone usage on Mars introduces a new paradigm for aerial surveys and reconnaissance. Research by [
10] on autonomous navigation for drones in complex 3D environments showcases the adaptability and efficiency of drones in overcoming the challenges posed by Martian topography and atmosphere. Drones, as detailed in [
11], equipped with Deep RL capabilities, offer a promising solution for end-to-end autonomous navigation, capable of dynamically adapting to unforeseen obstacles and maximizing mission success rates. The exploration of drones for Martian applications not only complements rover missions by providing aerial perspectives and accessing otherwise unreachable areas but also opens new avenues for environmental monitoring, mapping, and supporting infrastructure development.
Despite the substantial progress highlighted in the existing literature, several critical gaps remain unaddressed, motivating the direction of our study. Firstly, while theoretical models have extensively explored the potential of maglev trains and spaceplanes on Mars, there is a significant lack of empirical and simulation-based studies that provide an understanding of their operational dynamics in the Martian environment. This gap highlights the need for advanced simulation models that can accurately predict the performance, energy consumption, and environmental impact of these transportation systems under Mars-specific conditions.
Secondly, the sustainability and environmental impact assessments of proposed Martian transportation systems have been predominantly qualitative. There is a pressing need for comprehensive quantitative models that can evaluate the ecological footprint of transportation infrastructures on Mars, taking into consideration the unique Martian ecology and potential long-term consequences of human intervention.
Furthermore, while the strategic importance of transportation for Martian colonization has been acknowledged [
6,
7], detailed strategic planning frameworks that integrate transportation systems with broader urban development and settlement expansion strategies on Mars are conspicuously absent. This gap underscores the necessity for interdisciplinary research that combines urban planning, transportation engineering, and sustainability studies to devise holistic development plans for Martian colonies.
Lastly, the utilization of rovers and drones for Martian exploration has been explored in isolation, with limited consideration given to their integration into a cohesive Martian transportation and logistics network. This oversight points to a gap in current research regarding the operational synergies between different transportation modes and the potential for leveraging advancements in autonomous navigation and swarm intelligence [
12] to enhance the efficiency and resilience of Martian exploration and colonization efforts.
Addressing these gaps, our study employs a comprehensive approach that encompasses advanced simulation models, quantitative environmental impact assessments, strategic integration frameworks, and innovative uses of autonomous systems. Through this multifaceted analysis, we aim to contribute substantive insights and practical solutions to the challenges of developing sustainable, efficient, and integrated transportation systems for the future colonization of Mars.
These related works provide a strong foundation for the present study, which seeks to build on existing knowledge by offering a comparative analysis of maglev trains and spaceplanes in the Martian environment. By leveraging advanced simulation models and incorporating considerations of cost, efficiency, and sustainability, this research aims to contribute valuable insights to the ongoing development of Martian transportation infrastructure.
3. Methodology
This study employs a multifaceted analytical approach to compare the performance, costs, and environmental impacts of maglev trains and spaceplanes designed for Martian transportation. The methodology encompasses energy consumption modeling, cost analysis using Monte Carlo simulations, and environmental impact assessment, grounded in mathematical formulations and statistical techniques.
3.1. Energy Consumption Modeling
Energy consumption for both transportation systems is estimated through physical models that account for Martian environmental conditions, vehicle specifications, and operational parameters.
3.1.1. Maglev Train
The energy consumption of the maglev train is modeled considering the kinetic energy required for movement and additional energy expenditures related to overcoming Martian topographical variations. The kinetic energy,
, is given by
where
m is the mass of the train and
v is its velocity. The potential energy,
, required for elevation change, is estimated as
where
g is the gravitational acceleration on Mars (
), and
h is the elevation change. The total energy consumption,
, over a distance
d, incorporating regenerative braking efficiency
during downhill segments, is calculated as
where
represents the percentage of potential energy recovered through regenerative braking.
3.1.2. Spaceplane
The spaceplane’s energy consumption is divided into ascent and descent phases, considering both kinetic and potential energy, as well as atmospheric drag. The total energy,
, is the sum of potential energy for ascent and kinetic energy for the ascent and descent phases, adjusted by a drag coefficient
:
where
h is the ascent altitude and
quantifies the effect of Martian atmospheric drag on energy consumption.
3.2. Cost Analysis with Monte Carlo Simulations
Monte Carlo simulations are conducted to estimate the variability and risk associated with the construction and maintenance costs of both transportation systems over a 10-year period. The simulations model cost outcomes under different scenarios, incorporating variability in construction costs, maintenance expenses, and operational efficiencies.
Simulation Parameters
Cost parameters are modeled as normal distributions with means and standard deviations based on preliminary estimates and expected variability:
Maglev train construction and maintenance costs: .
Spaceplane development and maintenance costs: .
N simulations are run to generate distributions of total costs, from which mean costs and standard deviations are calculated.
3.3. Environmental Impact Assessment
A qualitative assessment framework is used to evaluate the environmental impacts of each system, focusing on construction materials, energy sources, and the potential for ecological disturbance on Mars. Comparative metrics include carbon footprint, energy efficiency, and land use impact.
This methodology provides a comprehensive basis for assessing the feasibility and implications of implementing maglev trains and spaceplanes as part of Martian transportation infrastructure, integrating mathematical rigor with practical considerations of cost and environmental sustainability.
4. Results
The application of the outlined methodology yielded significant insights into the energy consumption, cost implications, and environmental impacts of implementing maglev trains and spaceplanes for Martian transportation. This section details these findings, providing a quantitative basis for comparing the two systems.
The methodology applied for estimating the energy consumption of Martian transportation systems—specifically, maglev trains in Algorithm 1 and spaceplanes in Algorithm 2—incorporates fundamental physics principles tailored to the Martian environment. For the maglev train, our model calculates the kinetic energy required for movement across flat terrains and additional potential energy for overcoming inclines. Notably, the inclusion of a regenerative braking system significantly enhances energy efficiency during downhill travel, showcasing the maglev’s adaptability to Martian topography.
| Algorithm 1 Energy consumption calculation for maglev train. |
- 1:
Input: distance (m), incline_percentage (%), speed (m/s), mass (kg), gravity (m/s2) - 2:
Calculate kinetic energy: - 3:
Calculate height change: - 4:
if incline_percentage then - 5:
Calculate potential energy for uphill: - 6:
else - 7:
Set - 8:
end if - 9:
Calculate total energy without recovery: - 10:
if incline_percentage then - 11:
Calculate energy recovery: - 12:
Adjust total energy with recovery: - 13:
end if - 14:
return
|
| Algorithm 2 Energy consumption calculation for spaceplane. |
- 1:
Input: ascent_altitude (m), speed (m/s), mass (kg), gravity (m/s2), drag_factor - 2:
Calculate potential energy for ascent: - 3:
Calculate kinetic energy adjusted for drag: - 4:
Calculate total energy consumption: - 5:
return
|
Conversely, the spaceplane’s energy model accounts for the dual challenges of achieving sufficient altitude and overcoming atmospheric drag, factors critical to low-orbital flight on Mars. The comprehensive approach, integrating potential and kinetic energy calculations with drag considerations, underscores the spaceplane’s higher energy demands, particularly evident in the ascent phase. This analysis reveals the contrasting energy profiles of the two systems, emphasizing the maglev’s efficiency for surface travel and the spaceplane’s capability for rapid point-to-point transit.
These simulations not only provide a quantitative basis for comparing the maglev and spaceplane but also highlight the importance of optimizing operational parameters—such as speed for the maglev and ascent altitude for the spaceplane—to balance energy consumption against performance requirements. This nuanced understanding of energy dynamics plays a crucial role in informing the strategic selection and development of transportation infrastructures for future Martian colonies.
4.1. Energy Consumption Analysis
Our simulations reveal distinct profiles of energy consumption for the maglev train and spaceplane, reflecting their operational differences and the Martian environment’s challenges.
The maglev train demonstrated an average energy consumption of 3.47 MJ per 100 km for flat terrain, indicating its efficiency in surface-level transportation. The inclusion of regenerative braking mechanisms notably reduced energy requirements during downhill segments, enhancing its overall energy efficiency.
The spaceplane’s energy consumption was significantly higher, with an average total of 4.37 GJ for a round trip, including ascent and descent phases. This increased energy demand is attributed to the need to overcome Mars’s gravitational pull and the atmospheric drag during flight operations.
4.2. Cost Analysis and Monte Carlo Simulations
Monte Carlo simulations provided a probabilistic view of the cost implications associated with each transportation option over a 10-year operational period.
The simulations estimated an average total cost of USD 6014.32 million for the maglev system, with a standard deviation of USD 1008.46 million. This variability underscores the financial risk associated with the extensive infrastructure required for maglev implementation.
For the spaceplane system, the average total cost was USD 1497.91 million, with a standard deviation of USD 251.09 million. The lower average cost and reduced variability suggest a more predictable financial profile, albeit with higher operational energy requirements.
In the analysis of the maglev train’s operational efficiency,
Figure 1 illustrates the relationship between the train’s speed and its energy consumption. The graph demonstrates a direct correlation, indicating that higher speeds result in increased energy requirements. This relationship underscores the importance of optimizing speed to balance energy efficiency and transit time for the maglev system on Mars.
Figure 2 presents the findings from the simulation of the spaceplane’s energy consumption as a function of ascent altitude. The results indicate that energy consumption significantly increases with higher ascent altitudes, reflecting the additional power required to overcome gravitational forces and atmospheric drag. These findings are crucial for designing spaceplane missions, suggesting a trade-off between minimizing energy consumption and achieving necessary orbital parameters.
The economic feasibility of implementing transportation systems on Mars is a critical consideration in the planning and development of Martian colonies.
Figure 3 offers a comparative cost analysis between the maglev train and spaceplane options, breaking down their initial construction or acquisition costs against annual maintenance expenses. This analysis reveals the distinct financial profiles of each system, with the maglev train exhibiting higher initial costs due to its extensive infrastructure requirements, whereas the spaceplane presents a lower initial investment but incurs significant maintenance costs. Understanding these cost dynamics is essential for making informed decisions about the deployment of transportation infrastructure on Mars, balancing upfront investments with long-term operational sustainability.
4.3. Environmental Impact Considerations
A qualitative assessment indicated that both systems present unique environmental challenges and opportunities. The maglev train’s surface infrastructure could disrupt Martian soil and potentially impact subsurface ice reserves. Conversely, the spaceplane’s atmospheric operations may pose risks related to atmospheric pollution and disturbance, albeit minimally due to Mars’s thin atmosphere.
4.4. Comparative Analysis
The comparative analysis highlights a trade-off between the maglev train’s lower energy consumption and the spaceplane’s lower cost and financial risk profile. While the maglev train offers advantages in terms of energy efficiency and potential integration with Martian urban planning, the spaceplane provides rapid transit capabilities with less upfront infrastructure investment.
To further elucidate the financial considerations of implementing maglev trains versus spaceplanes for Martian colonization,
Figure 4 presents the distribution of total operational costs over a 10-year horizon, as estimated by Monte Carlo simulations. This distribution highlights the variability and risk associated with the long-term financial commitments of each transportation option. The maglev train, while offering a sustainable solution for surface transportation, exhibits a wider cost distribution, indicating a higher degree of financial risk primarily due to its extensive infrastructure requirements. Conversely, the spaceplane demonstrates a narrower cost distribution, reflecting a more predictable and potentially manageable financial profile despite its higher energy demands. These distributions are instrumental in assessing the financial viability and risk of each transportation system, providing crucial insights for strategic planning and investment decisions in Martian infrastructure development.
These results underscore the complexity of choosing an optimal transportation system for Mars, balancing operational efficiency, cost-effectiveness, and environmental sustainability. Further research and technological advancements will play a critical role in addressing these challenges and refining the feasibility assessments for both transportation options.
4.5. Cost Variability and Risk Assessment through Monte Carlo Simulations
To assess the financial implications and risks associated with the deployment of maglev trains and spaceplanes on Mars, Monte Carlo simulations were conducted. These simulations projected the total operational costs over a 10-year period, incorporating variability in construction and maintenance expenses. The pseudocode can be found in Algorithm 3.
| Algorithm 3 Monte Carlo simulation for Martian transportation costs. |
- 1:
Set , - 2:
Define cost parameters for maglev and spaceplane with means and standard deviations - 3:
Initialize arrays to store total costs: , - 4:
for o in 1 to do - 5:
Generate maglev construction and maintenance costs - 6:
Sum maglev costs for simulation: - 7:
Generate spaceplane initial and maintenance costs - 8:
Sum spaceplane costs for simulation: - 9:
end for - 10:
Calculate and return mean and standard deviation for both systems’ total costs
|
The simulations, based on 10,000 iterations, revealed that the following:
The maglev train system is associated with an average total cost of USD 6014.32 million over 10 years, with a standard deviation of USD 1008.46 million. This variability reflects the financial risk tied to the maglev’s extensive infrastructure and maintenance requirements.
The spaceplane system, in contrast, demonstrated an average total cost of USD 1497.91 million over the same period, accompanied by a standard deviation of USD 251.09 million. The narrower cost distribution for the spaceplane suggests a more predictable and potentially lower-risk financial profile, despite higher operational energy demands.
These findings highlight the importance of comprehensive financial planning and risk management in the development of Martian transportation systems. The maglev train, while promising in terms of energy efficiency and sustainability, presents higher upfront costs and financial variability. Conversely, the spaceplane offers a more cost-effective and flexible option for early colonization phases, albeit with considerations for long-term operational efficiency and scalability.
The results of the Monte Carlo simulations provide crucial insights for strategic decision making, highlighting the need to balance initial investments, operational costs, and financial risk in the planning and implementation of Martian transportation infrastructures.
In developing the energy consumption models for both the maglev train and spaceplane, several key assumptions were made to align our analysis with the current understanding of Martian conditions. These assumptions include the gravitational acceleration on Mars, the atmospheric density for calculating drag on the spaceplane, and the efficiency of regenerative braking systems for the maglev train. Recognizing Mars’ reduced gravity compared to Earth, at approximately 3.71 m/s2, and its thin atmosphere, these factors critically influence the operational dynamics and energy requirements of transportation systems. Furthermore, the incorporation of regenerative braking in maglev trains reflects advancements in magnetic levitation technology, offering a realistic approach to energy recovery during deceleration and downhill traverses.
For the cost analysis conducted through Monte Carlo simulations, our assumptions regarding construction and maintenance costs are based on extrapolations from existing aerospace and high-speed rail projects, adjusted for the challenges and resource constraints expected on Mars. These include the higher costs associated with transporting initial construction materials from Earth, the reliance on ISRU for ongoing maintenance, and the development of infrastructure in an environment lacking an existing industrial base. The variability in these costs, modeled as normal distributions, reflects the uncertainties inherent in pioneering projects on Mars, from technological hurdles to unforeseen logistical and environmental challenges.
Incorporating a more critical examination of the technological feasibility of maglev trains and spaceplanes for Martian use, we recognize the necessity to bridge ambitious conceptual designs with practical implementation frameworks. This involves a detailed assessment of the current state of these technologies on Earth, their adaptability to Martian conditions, and realistic timelines for their development and deployment on Mars.
Maglev technology, while proven on Earth, faces unique challenges when considered for Mars. These include the construction of extensive track infrastructure on Martian terrain, which is marked by significant geographical and environmental variability. The production and maintenance of maglev systems also necessitate advanced materials and manufacturing processes that can withstand Mars’ extreme temperature fluctuations and dust storms. Current maglev systems on Earth, though technologically mature, have not been designed for such conditions. As a result, significant research and development efforts are required to adapt or redesign maglev technology for Martian application, potentially spanning several decades.
Spaceplanes, on the other hand, propose a flexible approach to Martian transportation, capable of bridging vast distances and geographical barriers. The challenge lies in developing propulsion systems efficient and powerful enough to launch from Mars’ surface into low Martian orbit or beyond, considering Mars’ gravity and atmospheric composition. Current spaceplane technologies, such as those in development for Earth’s commercial spaceflight and military applications, offer a foundation. However, adapting these systems for Mars will require extensive modifications to propulsion, heat shielding, and life support systems. The technological feasibility of spaceplanes as rapid transit systems on Mars hinges on advancements in aerospace engineering, particularly in propulsion technology and materials science, that could extend over several decades.
To enhance our understanding of the sustainability of proposed Martian transportation systems, a more detailed quantitative environmental impact assessment is paramount. This analysis should extend to lifecycle analysis (LCA) of maglev trains and spaceplanes, evaluating their impacts from construction through to operation and eventual decommissioning, with a specific focus on Martian ecosystems.
The LCA would encompass the extraction and processing of Martian resources for construction materials, considering the energy intensity and environmental disturbance of such activities. For maglev trains, this involves assessing the impact of constructing extensive track infrastructure across diverse Martian landscapes. For spaceplanes, the focus shifts to the production of vehicles capable of withstanding Mars’ atmospheric conditions and the implications of frequent launches and landings on the local environment.
Energy consumption is another critical factor, with the assessment quantifying not only the operational energy requirements of each system but also the energy needed for the production of construction materials and the maintenance of infrastructure. The reliance on renewable energy sources versus nonrenewable, and the efficiency of energy use throughout the system’s lifecycle, will significantly influence its environmental footprint.
Potential pollution sources, including atmospheric emissions from spaceplane operations and dust generation from maglev train construction, should be quantitatively evaluated. This assessment would consider the capacity of the Martian environment to absorb such impacts without significant degradation, particularly in terms of preserving potential biosignatures and avoiding contamination of scientifically valuable sites.
4.6. Risk Assessment through Monte Carlo Simulation
To quantify the risks associated with the Martian transportation project, we conducted a Monte Carlo simulation that incorporates key risk parameters such as construction cost, maintenance rate, and operational efficiency. By assigning appropriate probability distributions to these parameters, we can generate a range of possible outcomes and assess the likelihood of different risk scenarios.
Figure 5 presents the results of the Monte Carlo simulation for risk assessment. The left plot depicts the distribution of the total project cost, considering the initial construction cost and the maintenance costs over a 10-year project lifecycle. The construction cost follows a normal distribution with a mean of 1000 million USD and a standard deviation of 200 million USD, while the maintenance rate follows a triangular distribution with a minimum of 0.01, a mode of 0.03, and a maximum of 0.05.
The right plot illustrates the distribution of the project success rate, which is based on the operational efficiency of the transportation system. The operational efficiency is modeled using a uniform distribution with a minimum of 0.8 and a maximum of 0.95, representing the range of possible efficiency levels.
The total project cost plot provides insights into the financial risks associated with the project. The distribution indicates the range and likelihood of different cost scenarios, allowing decision makers to assess the potential for cost overruns or savings and make informed budgeting and financial planning decisions.
The project success rate plot, on the other hand, focuses on the operational risks of the transportation system. By considering the operational efficiency, it showcases the expected performance and reliability of the system. Decision makers can use this information to evaluate the likelihood of achieving desired success rates, identify potential risks that may impact system performance, and develop strategies to mitigate those risks.
Overall, the Monte Carlo simulation provides a comprehensive risk assessment framework that takes into account both financial and operational aspects of the Martian transportation project. By leveraging probability distributions and considering multiple risk parameters, this approach enables a more informed and data-driven decision-making process for managing and mitigating project risks.
In the next sections of the article, we explore alternative transportation methods, such as rovers, drones, and hyperloop systems, highlighting their potential roles within the Martian transportation ecosystem. The inclusion of this analysis is twofold:
Complementarity and integration: These alternative modes are not standalone options but complement the primary transportation systems discussed in the article. By examining their capabilities and limitations, we provide a holistic view of Martian transportation infrastructure. This comprehensive perspective is crucial for planning an integrated transportation network that supports various logistical needs, from surface exploration to cargo and passenger transit between colonies.
Technological and operational diversity: Discussing these modes introduces considerations of technological diversity and operational flexibility, which are critical for adapting to Mars’ unique challenges. For instance, the adaptability of drones to conduct aerial surveys or the capability of rovers for ground-level exploration.
Specifically, we will also study the application of autonomous navigation and swarm intelligence, particularly focusing on how these technologies can optimize the efficiency and safety of Martian transportation:
Innovation in transportation: The integration of autonomous navigation systems and swarm intelligence represents the forefront of innovation in transportation technology. This section highlights the cutting-edge research and development efforts aimed at making Martian transportation systems more autonomous, reliable, and efficient.
Operational efficiency and safety: These technologies are of utmost importance for ensuring the operational efficiency and safety of transportation on Mars, where human intervention may be limited or delayed due to communication lags.
5. Alternative Modes of Navigation on Mars
The exploration and eventual colonization of Mars necessitate the development of efficient and reliable transportation systems. Beyond the concepts of magnetically levitated trains and spaceplanes, alternative modes such as hyperloops, drones, and rovers present viable options for navigating the Martian landscape. Each mode offers unique advantages and challenges, influenced by factors including energy consumption, terrain adaptability, and payload capacity.
The hyperloop [
13], a high-speed transit system through near-vacuum tubes, stands out for its potential to revolutionize intercolony transport on Mars. Its energy consumption, while significant, is justified by its capacity for rapid and protected transit across vast distances, minimizing exposure to Mars’ harsh surface conditions. The primary challenge lies in the initial infrastructure investment and the technological demands of maintaining a near-vacuum state in Martian conditions. However, once established, the hyperloop could provide an unparalleled combination of speed and efficiency for cargo and passenger movement.
Drones offer unmatched flexibility and terrain adaptability, capable of aerially delivering small payloads to remote or otherwise inaccessible locations. As illustrated in
Figure 6, drones exhibit the lowest energy consumption per kilometer among the discussed transportation modes, highlighting their efficiency for specific tasks such as site surveying, small cargo delivery, and emergency supply drops. The limitations of drones include their relatively small payload capacity and the operational challenges posed by Mars’ thin atmosphere and dust storms.
Rovers, with their proven track record on Mars, offer a balance between energy efficiency and payload capacity. Capable of navigating over rough terrain, rovers are indispensable for surface exploration, scientific research, and transporting supplies between nearby facilities. While their energy consumption per kilometer is higher than that of drones but lower than hyperloops, rovers’ versatility makes them a cornerstone of Martian surface operations. The development of advanced rover technologies could further enhance their efficiency and operational range.
In conclusion, the selection of an optimal transportation system for Mars will depend on a variety of factors including mission objectives, payload requirements, and geographic considerations. A hybrid approach, leveraging the strengths of hyperloops, drones, and rovers, may offer the most versatile and effective solution for meeting the diverse needs of Martian exploration and colonization. Future research and technological advancements will play a critical role in optimizing these systems for the unique challenges of Martian transport.
5.1. Autonomous Navigation Simulation on Martian Terrain
To address the unique challenges of Martian exploration [
14], we developed a simulation that models autonomous navigation [
5,
8,
15] through a representation of Martian terrain. The terrain includes obstacles that mimic the diverse landscape of Mars, from vast craters to rugged rocks, simulating conditions that autonomous drones or rovers would encounter.
The simulation employs a grid-based representation of the Martian surface, where each cell can be free, occupied by an obstacle, or part of the path determined by the autonomous navigation algorithm [
9,
11,
16]. A feature density parameter controls the distribution of obstacles across the grid, reflecting the variable complexity of the Martian terrain.
The A* pathfinding algorithm, renowned for its efficiency and accuracy in navigating complex environments, was utilized to calculate the optimal path from a designated start position to a goal position. This choice was motivated by the algorithm’s balance between exploration and goal-oriented movement, making it particularly suited for autonomous navigation in unknown or hazardous terrains.
Upon executing the simulation, the A* algorithm [
17] successfully identified a viable path through the Martian terrain, skillfully navigating around obstacles to reach the goal. The resultant path is visualized in
Figure 7, highlighting both the navigated path and the obstacles encountered.
The simulation highlights the potential of utilizing autonomous navigation algorithms [
18] for exploring Mars. The ability of the A* algorithm to dynamically find the most efficient route amidst a plethora of obstacles is particularly promising for future Mars missions, where terrain unpredictability poses a significant challenge.
Furthermore, the simulation highlights the importance of adaptability and robustness in the design of autonomous navigation systems for Martian explorers, whether drones or rovers. As Mars exploration missions continue to evolve, simulations such as this provide invaluable insights into the capabilities required for successful autonomous navigation on the Red Planet.
In an effort to enhance the realism and complexity of our navigation simulation of Mars, we introduced several significant improvements. These enhancements focus on the inclusion of dynamic atmospheric conditions, the simulation of terrain-specific obstacles such as craters and rocks, and the introduction of a swarm intelligence approach for navigating multiple drones simultaneously.
One of the novel features of our enhanced simulation is the modeling of dynamic atmospheric conditions, which directly influence the pathfinding algorithm. Wind speed and direction, varying both spatially across the terrain and temporally, add a layer of complexity to the navigation challenge. The algorithm now accounts for these conditions, adjusting the calculated paths to minimize the impact of adverse wind conditions on the drones’ energy consumption and flight stability. This adaptation is crucial for the realistic simulation of Martian exploration scenarios, where sudden changes in atmospheric conditions can drastically affect mission outcomes.
By introducing specific classes of obstacles, namely craters and rocks, each with unique costs associated with navigating through or around them, we have significantly enriched the terrain model. This improvement allows for a more detailed representation of the Martian surface, where craters pose a moderate navigation challenge and rocks present a lower, yet still significant, obstacle. The pathfinding algorithm dynamically evaluates these costs, ensuring the selection of the most efficient route to the goal while avoiding terrain features that would increase the mission’s risk or energy requirements.
Expanding the scope of our simulation to include swarm intelligence enables the study of collaborative navigation strategies among multiple drones. This approach not only enhances the efficiency of terrain coverage but also introduces the concept of redundancy and collaborative problem solving, which are vital for the success of complex exploration missions. By simulating the navigation of multiple drones, each starting from different positions but sharing a common goal, we can explore strategies for cooperative exploration and obstacle avoidance, further mimicking the challenges of real Martian exploration missions. A particular instance of the simulation is shown in
Figure 8 and
Figure 9; in
Figure 8, the simulation demonstrates how a swarm of drones navigates the terrain of Mars, while in
Figure 9, we present the dynamic atmospheric conditions that influence the pathfinding decisions.
These advancements in our simulation methodology highlight the complex interplay between environmental conditions, terrain features, and autonomous navigation algorithms in the context of exploration in Mars.
Future work will focus on further refining these models, incorporating real Martian topographical data for terrain features, and developing advanced algorithms that can more efficiently manage the energy resources of drones in response to the unpredictability of Martian atmospheric conditions. These efforts aim to bring us closer to the realization of autonomous exploration missions that can successfully navigate and study the Martian environment with unprecedented detail and robustness.
5.2. Considerations with Reinforcement Learning for Swarm Intelligence
The latest advancements in our simulation can incorporate an RL [
19,
20,
21] framework to model the swarm intelligence of drones [
22,
23] navigating through Martian terrain. This approach can allow each drone to learn from its environment and make decisions that optimize its path to the goal while adapting to dynamic atmospheric conditions and avoiding terrain-specific obstacles.
The RL model can be built upon the concept of agents (drones) interacting with their environment (the simulated Martian terrain) to achieve a certain goal (navigating to a specific location). The environment is represented as a grid where each cell can contain features such as craters and rocks, with varying costs associated with moving through them. The drones, acting as agents, learn to navigate this environment through trial and error, guided by a reward signal.
Each drone’s state is represented by its current position on the grid . The state space includes all possible positions that the drone can occupy on the grid.
The action space for each drone consists of nine possible actions, corresponding to moving to any of the eight surrounding cells or staying in place. Actions are represented numerically from zero to eight.
The reward function provides feedback to the drone based on its actions. Moving into a cell with a rock or crater incurs a negative reward proportional to the obstacle’s cost, encouraging the drone to find clear paths. An additional negative reward is assigned for actions that lead to collisions with the grid boundaries or result in no movement, thus promoting efficient navigation.
The Q-values, representing the expected utility of taking action
a in state
s, are updated using the Q-learning algorithm. The update rule is as follows:
where
is the learning rate,
is the discount factor, and
represents the maximum expected utility of any action in the next state
.
The simulation models dynamic atmospheric conditions by adjusting the cost of actions based on wind speed and direction. This introduces an additional layer of complexity, as drones must learn to adjust their paths not only based on static obstacles but also in response to changing environmental conditions.
The collective behavior of multiple drones, each learning and making decisions independently, exemplifies swarm intelligence. Through RL, drones adapt their strategies over time, learning to collaborate implicitly by sharing the same environment and goal.
In the context of autonomous navigation on Mars, the interplay between RL and A* pathfinding [
24,
25,
26] algorithms provides a robust framework for drones to navigate complex and dynamic environments. RL enables drones to learn from interactions with the environment, optimizing their decision-making process for unforeseen challenges through a trial-and-error approach. The A* algorithm complements this by providing an efficient method for planning paths based on a known model of the environment, taking into account static obstacles like craters and rocks as well as dynamic factors such as atmospheric conditions. By integrating RL and A*, drones can adaptively plan optimal paths, leveraging RL’s capacity for learning and adaptation and A*’s efficiency in pathfinding. This synergy allows for the continuous improvement of navigation strategies, ensuring that drones can efficiently and effectively achieve their objectives while responding to the unpredictable nature of the Martian environment.
5.3. Simulation Parameters and Considerations
The simulation parameters were meticulously chosen to reflect realistic Martian transportation scenarios while balancing computational tractability. For instance, the maglev train’s speed (300 km/h) and the spaceplane’s ascent and descent speeds (2000 m/s) were selected based on current technological projections and the specific challenges posed by Mars’ atmospheric and gravitational conditions. Parameters such as vehicle mass (1000 kg for initial calculations), distance (100 km), and payload capacities (50 metric tons for the maglev and 5 metric tons for the spaceplane) were derived from engineering estimates aimed at potential Mars colonization efforts.
Energy consumption simulation: Basic physics principles were applied to estimate kinetic and potential energy requirements for both transportation systems, providing an initial comparative analysis of their energy efficiency. This approach was chosen for its straightforwardness and ease of understanding, ensuring that our findings are accessible to a broad audience.
Payload capacity analysis: This analysis aimed to evaluate the impact of varying payload capacities on total energy consumption and logistics efficiency. We employed simple arithmetic operations to derive the number of trips required and total energy consumption, facilitating a clear comparison between the maglev and spaceplane systems.
A* pathfinding for autonomous navigation simulation: To simulate the pathfinding capabilities of autonomous vehicles in Martian terrain, we used the A* algorithm, renowned for its effectiveness in finding the shortest path between points in a weighted graph. The choice of A* was motivated by its balance between efficiency and accuracy, making it suitable for planning routes in potentially hazardous Martian environments.
The selection of simulation parameters and algorithms was guided by the dual objectives of realism and computational efficiency. By grounding our simulations in plausible technological and physical parameters, we aimed to ensure that our findings would remain relevant to future Mars exploration missions. Additionally, the algorithms were chosen for their proven reliability and widespread acceptance in the scientific community, thereby enhancing the reproducibility of our research.
6. Discussion
The comparative analysis of maglev trains and spaceplanes for Martian transportation reveals critical insights into their potential roles in supporting the colonization of Mars. This discussion interprets the results within the broader context of Martian colonization, addressing strategic considerations and the implications for future settlement planning.
The study’s findings illustrate a fundamental trade-off between the energy efficiency and infrastructure costs associated with maglev trains, and the operational flexibility and lower upfront costs of spaceplanes. While maglev trains offer a sustainable option for surface transportation, their high initial investment and infrastructure requirements pose significant challenges. Conversely, spaceplanes, despite their higher energy consumption, present a less capital-intensive solution for establishing initial transport links on Mars.
The selection of a transportation system for Martian colonies carries strategic implications beyond mere cost and energy considerations.
The maglev train system, with its potential for high efficiency and minimal environmental disruption during operation, aligns with long-term sustainability goals. Its scalability makes it well suited for expanding transportation networks as Martian colonies grow. However, the extensive infrastructure required necessitates substantial upfront investment and poses logistical challenges during the early stages of colonization.
In contrast, spaceplanes offer immediate, versatile transport capabilities, essential for the initial phases of colonization, where rapid deployment and flexibility are paramount. Their ability to connect disparate points on Mars without the need for extensive ground infrastructure enables quick access to resources and emergency response. However, the long-term viability and scalability of spaceplane operations depend on advancements in fuel efficiency and reduction in operational costs.
The findings of this study contribute to the growing body of research on Martian transportation systems and their role in supporting future colonization efforts. Previous studies have explored the potential of maglev trains [
2,
3] and spaceplanes [
4] as viable transportation options for Mars, highlighting their respective advantages in terms of energy efficiency, speed, and infrastructure requirements. Our results align with these findings, providing a quantitative basis for comparing the performance and cost implications of these systems in the Martian context.
The energy consumption analysis of maglev trains and spaceplanes extends the theoretical models presented in earlier works [
2,
3,
4,
5] by incorporating detailed simulations that account for the unique challenges posed by the Martian environment, such as reduced gravity, atmospheric drag, and topographical variations. The inclusion of regenerative braking in the maglev system and the consideration of ascent and descent phases in the spaceplane model offer a more comprehensive understanding of their operational dynamics, building upon the foundational knowledge established in previous studies.
Furthermore, the Monte Carlo simulations employed in this study provide a novel perspective on the financial risk and variability associated with implementing maglev trains and spaceplanes on Mars. While earlier research has acknowledged the economic implications of these systems [
6,
7], our analysis offers a probabilistic approach to quantifying the long-term cost distributions, enabling a more informed assessment of their financial feasibility and potential risks. This contributes to the ongoing discourse on the economic sustainability of Martian transportation infrastructures and highlights the importance of robust financial planning and risk management strategies.
The exploration of alternative transportation modes, such as hyperloops, drones, and rovers, complements the existing literature by offering a holistic view of the potential transportation landscape on Mars. The integration of RL algorithms for autonomous navigation builds upon the works of [
8,
9,
10,
11,
15], showcasing the potential for advanced autonomy in enhancing the operational efficiency and adaptability of these systems in the challenging Martian environment. This contributes to the growing interest in leveraging artificial intelligence (AI) and machine learning (ML) techniques to support Martian exploration and colonization efforts.
While this study provides a comprehensive analysis of transportation options for Martian colonization, including maglev trains, spaceplanes, hyperloops, drones, and rovers, it is not without limitations. One significant constraint is the reliance on theoretical models and simulations to predict energy consumption, costs, and environmental impacts. Actual implementation on Mars may encounter unforeseen challenges, such as extreme weather conditions, dust storms, and technological failures, which could affect the performance and feasibility of the proposed transportation systems. Additionally, the study’s scope is limited by the current understanding of Martian geology and atmosphere, which continues to evolve with ongoing research and exploration missions. Future studies could benefit from incorporating real Martian terrain data, advancements in materials science, and in situ resource utilization technologies to refine the models and simulations used in this analysis.
6.1. Considerations of Scalability, Environmental Impact, and Integration
Both systems must be scalable to accommodate the dynamic nature of Martian settlement expansion. While maglev trains provide a scalable infrastructure base, spaceplanes’ scalability is contingent upon technological advancements in propulsion and materials science.
Environmental considerations are paramount in preserving Mars’s natural state and ensuring the sustainability of human activities. The maglev train’s lower operational impact contrasts with the potential atmospheric and surface disturbances from spaceplane operations, necessitating careful planning and mitigation strategies.
The integration of transportation systems into Martian settlement plans requires a holistic approach, considering urban planning, resource allocation, and the support of scientific exploration. Maglev trains, with their fixed routes, offer predictability and reliability for urban planning, whereas spaceplanes provide flexibility in exploring and developing new areas of Mars.
In conclusion, the choice between maglev trains and spaceplanes involves balancing immediate logistical needs against long-term goals for Martian colonization. A multimodal transportation strategy, leveraging the strengths of both systems, may offer the most effective approach to supporting the sustainable growth and development of Martian settlements. Future research should focus on refining cost estimates, improving energy efficiency, and minimizing environmental impacts to inform the strategic planning and implementation of Martian transportation infrastructures.
6.2. Enhanced Model of Energy Consumption
The general formula for calculating energy consumption
E can be further developed to incorporate atmospheric drag
D, terrain elevation changes
, and system efficiency
, along with the kinetic energy
for movement:
where
Kinetic energy required for movement.
Potential energy required for overcoming elevation changes.
Energy required to overcome atmospheric drag.
Efficiency of the energy conversion system.
For the maglev train, the energy to overcome atmospheric drag is less significant due to its operation primarily in a near-vacuum environment or at low elevation where atmospheric density is reduced. However, terrain variability plays a crucial role:
For the spaceplane, atmospheric drag is a major factor, especially during ascent and descent through Mars’ atmosphere. The model is adjusted as follows:
where
Drag coefficient.
Atmospheric density at altitude.
Reference area of the vehicle.
Velocity of the vehicle.
The inclusion of these factors provides a more comprehensive and realistic model of energy consumption for transportation systems on Mars, in particular if there is the aim in further work to propose a high-fidelity digital twin:
Atmospheric conditions: Incorporating atmospheric drag for the spaceplane and, to a lesser extent, for the maglev train accounts for the energy lost in overcoming air resistance, which is critical for accurate energy estimations.
Terrain variability: Considering terrain elevation changes for the maglev train reflects the additional energy required for climbing hills or descending into valleys, affecting the overall energy efficiency.
System efficiency: Acknowledging the efficiency of the energy conversion systems recognizes that not all the input energy is converted into useful work, highlighting the importance of advanced technologies to maximize this factor.
Moving beyond this enhanced formulation, we can introduce multiple expressions to capture the energy dynamics of Martian transportation systems more accurately. These refinements consider the interplay between atmospheric conditions, vehicle dynamics, and Martian terrain, providing a multifaceted view of energy consumption.
The energy consumption model for the maglev train is expanded to account for the variability in Martian terrain and the efficiency of magnetic levitation technology:
where
Energy required for magnetic levitation, dependent on the levitation length L and efficiency factor .
The integral of considers the continuous change in elevation h over the path from start to end, weighted by Martian gravitational acceleration .
For the spaceplane, the model incorporates the effects of atmospheric density variations with altitude and the drag coefficient’s dependency on velocity and vehicle geometry:
where
Drag coefficient as a function of atmospheric density , vehicle velocity v, and reference area A, with , , and representing coefficients that account for the complex interactions between these variables.
The refined models for both maglev trains and spaceplanes on Mars represent a significant improvement in our ability to predict and analyze energy consumption with greater accuracy. By incorporating multiple expressions that account for the detailed physics of each transportation method, these models offer a more focused and comprehensive understanding of the operational dynamics on Mars. Future work will further refine these models, incorporating real-world data from Mars exploration missions to validate and adjust the theoretical assumptions made here.
6.3. Emerging Prospects for Rovers and Drones
Beyond maglev trains and spaceplanes, the exploration of alternative transportation methods such as rovers and drones opens new avenues for Martian exploration. Particularly, the capability of these technologies to integrate RL and other techniques for autonomous navigation presents a transformative potential for surface mobility on Mars.
Rovers, as the stalwarts of Martian exploration, have demonstrated remarkable success in traversing the Martian terrain. The integration of RL-based algorithms into rover operations could significantly enhance their autonomous decision-making capabilities. By learning from the environment and adapting to unforeseen obstacles, rovers equipped with RL can autonomously navigate complex terrains, optimize paths, and conduct scientific missions with minimal human intervention. This advancement not only extends the mission range and duration but also enriches the quality of scientific data collected, paving the way for more detailed and comprehensive exploration of Mars.
Drones, with their aerial advantage, offer a complementary perspective to rovers. The application of RL in drone fleets can revolutionize the way we map and study Mars by enabling dynamic and adaptive flight patterns. These patterns could effectively counteract the challenges posed by Martian dust storms and atmospheric variations, ensuring reliable and extensive aerial coverage. The ability of drones to swiftly adapt and respond to changing conditions, powered by RL, highlights their potential as versatile tools for reconnaissance, environmental monitoring, and support in logistic operations across Martian colonies.
The implementation of RL-based autonomous driving fleets heralds a new era in Martian transportation strategy. By leveraging the strengths of both rovers and drones, Mars missions can achieve unprecedented scalability and flexibility in exploration activities. The adaptive learning process inherent in RL allows for continuous improvement in navigation strategies, enhancing the efficiency and safety of missions. Moreover, the collaborative operation of rovers and drones, guided by swarm intelligence principles, could significantly amplify the collective capability of these fleets, enabling them to undertake complex tasks ranging from detailed geological surveys to search and rescue operations.
Incorporating RL into the strategic planning of Martian transportation infrastructures offers a promising approach to overcoming the environmental and logistical challenges of Mars colonization. The ability of autonomous fleets to learn and adapt not only ensures the sustainability of exploration activities but also lays the groundwork for the development of advanced logistic networks essential for supporting life on Mars.
In addition, the integration of rovers and drones into a comprehensive Martian transportation network alongside maglev trains or spaceplanes offers numerous opportunities for synergistic operations. Rovers and drones can serve as critical components in the first- and last-mile connectivity of the transportation network. Rovers, with their ability to traverse rough terrain and carry heavy payloads, can be deployed to transport goods and personnel between maglev train stations or spaceplane landing sites and the final destinations, such as habitats, research facilities, or resource extraction sites. This integration ensures seamless logistics and reduces the need for extensive infrastructure development in remote areas. Drones, on the other hand, can provide swift and efficient aerial support to the transportation network. They can be utilized for rapid delivery of essential supplies, emergency response, and reconnaissance missions.
7. Challenges and Opportunities in Developing Martian Transportation Infrastructure
The development of a robust transportation infrastructure on Mars [
27] presents a unique set of challenges and opportunities. The success of this endeavor relies heavily on addressing key factors such as the availability of raw materials, the need for advanced manufacturing capabilities, and the potential for international collaboration.
One of the primary challenges in developing transportation infrastructure on Mars is the limited availability of raw materials. Unlike Earth, Mars lacks easily accessible resources, such as fossil fuels and an abundance of water, which are essential for the production of construction materials and propellants. Therefore, the transportation infrastructure must heavily rely on in situ resource utilization (ISRU) techniques to extract and process Martian resources, such as regolith, water ice, and atmospheric gases. The development of efficient ISRU technologies is crucial to ensure the sustainability and cost-effectiveness of transportation infrastructure construction on Mars.
Another significant challenge is the need for advanced manufacturing capabilities on Mars. The harsh Martian environment, characterized by high radiation levels, extreme temperature variations, and dust storms, necessitates the use of resilient and adaptable manufacturing techniques. Additive manufacturing, or 3D printing, has emerged as a promising solution to this challenge. By utilizing Martian resources as feedstock, 3D printing technologies can enable the on-site fabrication of transportation infrastructure components, reducing the reliance on Earth-based supplies and lowering the overall cost of construction. However, the development of these advanced manufacturing capabilities requires significant investment in research and development, as well as rigorous testing to ensure their reliability in Martian conditions.
Despite these challenges, the development of transportation infrastructure on Mars also presents numerous opportunities for international collaboration. The scale and complexity of this endeavor necessitate the pooling of resources, expertise, and financial investments from multiple nations and private entities. International collaboration can foster the sharing of knowledge, technologies, and best practices, accelerating the development process and reducing overall costs. Moreover, collaborative efforts can promote the establishment of common standards and protocols for transportation infrastructure, ensuring interoperability and compatibility between different systems developed by various stakeholders.
International collaboration also opens up opportunities for shared access to transportation infrastructure on Mars. By jointly investing in the development of maglev trains, spaceplanes, and other modes of transportation, nations can ensure equitable access to these resources, promoting scientific cooperation and the exchange of personnel and goods between Martian colonies. This collaborative approach can lay the foundation for a more integrated and efficient transportation network on Mars, benefiting all parties involved.
To seize these opportunities and overcome the challenges, it is essential to establish a clear framework for international cooperation in the development of Martian transportation infrastructure. This framework should outline the roles and responsibilities of each participating nation or entity, define the sharing of costs and benefits, and establish governance mechanisms to ensure transparency and accountability. By fostering a spirit of collaboration and shared vision, the international community can work together to build a sustainable and efficient transportation infrastructure on Mars, paving the way for the successful colonization of the Red Planet.
7.1. Socioeconomic Impacts of Transportation Options on Martian Colonies
The choice of transportation options on Mars will have significant socioeconomic implications for the colonies established on the Red Planet. The development and operation of maglev trains, spaceplanes, rovers, and drones will not only shape the physical infrastructure of these settlements but also influence factors such as job creation, skill requirements, and the potential for economic growth and diversification.
One of the primary socioeconomic impacts of the transportation options will be the creation of a diverse range of job opportunities. The construction, maintenance, and operation of maglev trains and spaceplanes will require a skilled workforce, including engineers, technicians, and support staff. These jobs will span various sectors, such as manufacturing, infrastructure development, and transportation services. Similarly, the deployment of rovers and drones will generate employment opportunities in fields such as robotics, autonomous systems, and data analysis. The creation of these jobs will be crucial for attracting and retaining a talented workforce on Mars, ensuring the long-term sustainability and growth of the colonies.
However, the skill requirements for these jobs will be highly specialized, necessitating substantial investment in education and training programs. Martian colonies will need to develop a robust educational infrastructure that can equip the workforce with the necessary skills to operate and maintain advanced transportation systems. This may involve the establishment of technical schools, apprenticeship programs, and collaborations with Earth-based educational institutions. The development of a skilled workforce will be essential for the efficient functioning of the transportation network and the overall success of the colonies.
The choice of transportation options will also have implications for economic growth and diversification on Mars. The construction and operation of maglev trains and spaceplanes will stimulate the development of supporting industries, such as materials processing, energy production, and communication systems. These industries will contribute to the overall economic growth of the colonies, creating a multiplier effect that generates additional jobs and revenue streams. Moreover, the presence of a reliable and efficient transportation network will attract private investment and entrepreneurial activities, fostering the growth of new businesses and services.
The deployment of rovers and drones will also contribute to economic diversification by enabling the exploration and utilization of Martian resources. These autonomous vehicles can assist in the identification and mapping of mineral deposits, water ice, and other valuable resources. The data collected by these vehicles will be crucial for the development of resource extraction and processing industries, which will play a vital role in the long-term sustainability and self-sufficiency of Martian colonies.
7.2. The Necessity of a Robust Communication Network for Martian Transportation
As the transportation infrastructure on Mars evolves to include maglev trains, spaceplanes, rovers, and drones, the need for a robust and reliable communication network becomes increasingly critical. These transportation modes will heavily rely on tele-operation and tele-control, necessitating high-throughput data links [
28,
29,
30] to ensure seamless operation and coordination.
Rovers and drones, in particular, will require a stable and high-bandwidth communication infrastructure to facilitate their autonomous navigation and data transmission capabilities. These vehicles will be equipped with a suite of sensors, cameras, and scientific instruments that generate substantial amounts of data. To effectively utilize these data for real-time decision making, mission control, and scientific analysis, a reliable communication network with low latency and high throughput is essential. This network will enable the transmission of high-resolution images, 3D maps, and sensor data, allowing operators on Earth or in Martian colonies to remotely control and monitor the vehicles’ activities.
Similarly, spaceplanes and maglev trains will also benefit from a robust communication network. Spaceplanes, during their ascent, descent, and landing phases, will require continuous communication with ground control to ensure safe and efficient operations. Real-time telemetry data, including vehicle health status, trajectory information, and environmental conditions, will be transmitted through the communication network, enabling operators to make informed decisions and respond promptly to any anomalies or emergencies.
Maglev trains, while primarily operating autonomously, will still require a reliable communication infrastructure for various purposes. The communication network will facilitate the exchange of data between trains, stations, and control centers, ensuring smooth coordination and scheduling of services. Passenger information systems, emergency communications, and remote diagnostics will also rely on the communication infrastructure to enhance the safety, efficiency, and user experience of the maglev transportation system.
To establish a robust communication network on Mars, several key challenges must be addressed. The vast distances, rugged terrain, and harsh atmospheric conditions on the Red Planet pose significant obstacles to the propagation of radio signals. Therefore, the communication infrastructure must be designed to overcome these challenges, ensuring reliable coverage across the Martian surface.
One potential solution is the deployment of a constellation of communication satellites in Martian orbit. These satellites can act as relay stations, receiving data from ground-based vehicles and transmitting them to other satellites or ground stations. By strategically positioning these satellites, a global communication network can be established, providing coverage to even the most remote regions of Mars. The use of advanced coding and modulation techniques, such as error correction codes and adaptive signal processing, can further enhance the reliability and efficiency of data transmission.
In addition to satellite-based communication, the development of a network of ground-based communication nodes can provide localized coverage and redundancy. These nodes can be strategically placed near transportation hubs, habitats, and resource extraction sites, ensuring reliable communication in areas of high activity. The use of mesh networking technologies can enable the creation of a self-healing and resilient communication infrastructure, minimizing the impact of individual node failures.
The development of a robust communication network on Mars will require significant investment in research, development, and deployment. International collaboration and standardization efforts will be crucial to ensure the interoperability and scalability of the communication infrastructure.
Incorporating exascale computing into the strategic planning for Martian colonization offers transformative opportunities for optimizing transportation systems. Exascale computing, with its capability to execute a billion billion calculations per second, enables unprecedented simulation, analysis, and optimization of complex systems. This document outlines the potential applications of exascale computing in enhancing the integration of transportation infrastructures with urban planning and settlement expansion on Mars.
7.3. Exascale Computing for Advanced Simulation and Digital Twin Modeling
Exascale computing [
31] offers immense potential for creating highly detailed simulations and digital twins of Martian transportation systems, such as maglev trains and spaceplanes, throughout their entire lifecycle.
One key application of exascale computing in this context is terrain and environmental impact analysis. By simulating the Martian topography with unprecedented precision, digital twins can help optimize transportation routes, minimizing environmental disruption and ensuring accessibility. These simulations can take into account a wide range of variables, such as soil composition, atmospheric conditions, and subsurface water ice distribution, to provide a holistic understanding of the impact of transportation infrastructure on the Martian landscape.
Another critical aspect of Martian colonization that can benefit from exascale computing is habitat connectivity. Digital twins can be employed to optimize transportation routes, ensuring efficient connectivity between habitats, resource extraction sites, and research facilities. By considering factors such as distance, energy consumption, and construction feasibility, these simulations can help design transportation networks that maximize the efficiency and sustainability of Martian settlements.
Exascale computing also plays a vital role in supporting scientific exploration on Mars. By creating digital twins of exploration vehicles, such as rovers and drones, researchers can optimize their routes and mission parameters based on real-time data and predictive modeling. These simulations can take into account the unique challenges posed by the Martian terrain, atmospheric conditions, and resource constraints, enabling the development of robust and adaptable exploration strategies.
Moreover, exascale computing can facilitate the integration of transportation systems into the broader framework of Martian urban planning and settlement expansion. By simulating various urban development scenarios, digital twins can help determine the optimal layout of habitats, research facilities, and transportation infrastructure. These simulations can also incorporate predictive modeling techniques to forecast future colonization needs and challenges, informing the development of scalable and resilient transportation systems.
8. Conclusions and Future Work
This study presented a comprehensive analysis of two proposed transportation systems for Martian colonies: maglev trains and spaceplanes. Through detailed simulations and Monte Carlo analyses, we evaluated their energy consumption, cost implications, and environmental impacts. The key findings indicate that while maglev trains offer energy-efficient surface transportation with lower operational impacts, spaceplanes provide a flexible and less capital-intensive option for early Martian colonization efforts.
8.1. Summary of Key Findings
Maglev trains demonstrated superior energy efficiency for surface transportation on Mars but require significant upfront investment in infrastructure.
Spaceplanes, despite their higher energy requirements, offer rapid and flexible transportation capabilities with lower initial costs.
Monte Carlo simulations highlighted the financial variability associated with each option, underscoring the importance of risk management in transportation planning.
Environmental considerations and integration with Martian settlement plans emerged as critical factors in selecting a suitable transportation system.
8.2. Implications for Martian Transportation Planning
The study’s findings underscore the necessity of a strategic, multifaceted approach to transportation planning on Mars. Balancing the immediate needs of early settlers with the long-term vision for Martian colonization will be crucial in selecting and developing transportation infrastructures. A hybrid model, leveraging the strengths of both maglev trains and spaceplanes, may offer the most effective solution for meeting the diverse transportation needs of Martian colonies.
8.3. Recommendations for Future Research and Analysis
Future research should focus on several key areas to further refine our understanding of Martian transportation systems:
Detailed environmental impact assessments to quantify the ecological footprint of each transportation option and develop mitigation strategies.
Advanced simulations incorporating the latest technological advancements in propulsion, materials science, and renewable energy sources to improve the accuracy of cost and energy consumption estimates.
Exploration of alternative transportation technologies and infrastructure models that could complement or enhance the capabilities of maglev trains and spaceplanes.
Development of integrated transportation planning frameworks that align with broader Martian urban development and settlement expansion strategies.
As we envision the future of Mars colonization, the role of rovers and drones, empowered by advanced RL algorithms, becomes increasingly central. The journey towards establishing sustainable human settlements on Mars will undoubtedly benefit from the enhanced capabilities of these autonomous systems.
The continued evolution of RL technologies presents a promising avenue for advancing our exploration goals on Mars. Future research initiatives should aim to:
Enhance the sophistication of RL models to improve the autonomy, reliability, and decision-making prowess of rovers and drones under the challenging conditions of Mars.
Explore the integration of multiagent systems where rovers and drones can operate in synergy, optimizing exploration strategies and resource utilization through cooperative learning and decision making.
Develop robust simulation environments that accurately replicate the Martian atmosphere, terrain, and environmental dynamics, enabling the training of RL models in highly realistic settings.
Investigate the potential of RL in managing the energy resources of autonomous fleets, ensuring their long-term operability and contribution to the Mars colonization effort.
By embracing the challenges and opportunities presented by Mars, and harnessing the potential of RL in the operation of rovers and drones, we edge closer to realizing the vision of a human presence on the Red Planet. The integration of advanced autonomous systems into Martian exploration strategies not only enhances our capacity for discovery but also fortifies the foundation for sustainable extraterrestrial colonization.
In conclusion, the successful colonization of Mars will depend on the careful planning and implementation of sustainable, efficient, and adaptable transportation systems. By continuing to advance our research and leveraging innovative technologies, we can pave the way for the establishment of thriving human settlements on the Red Planet.




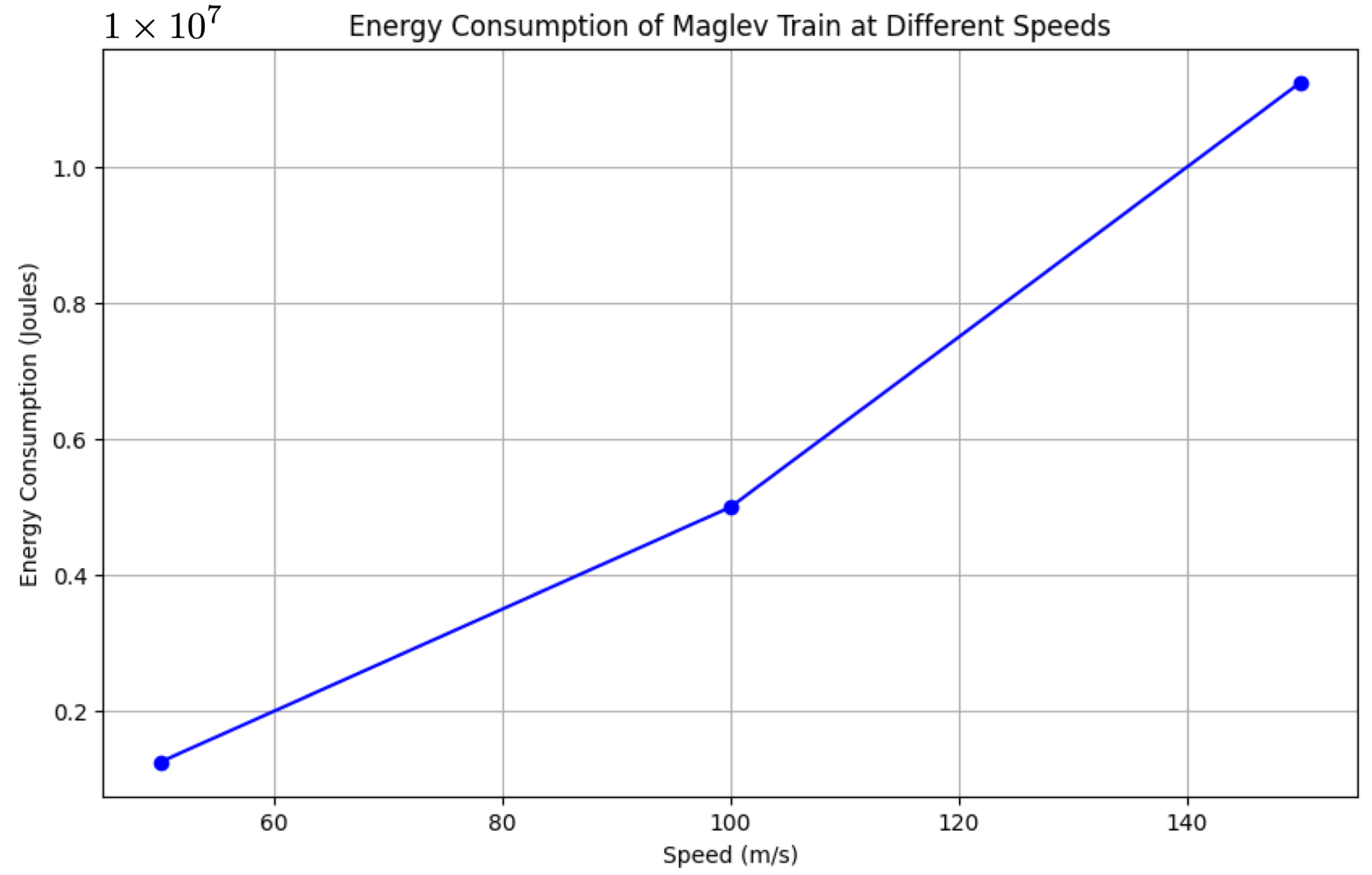{kind=link}
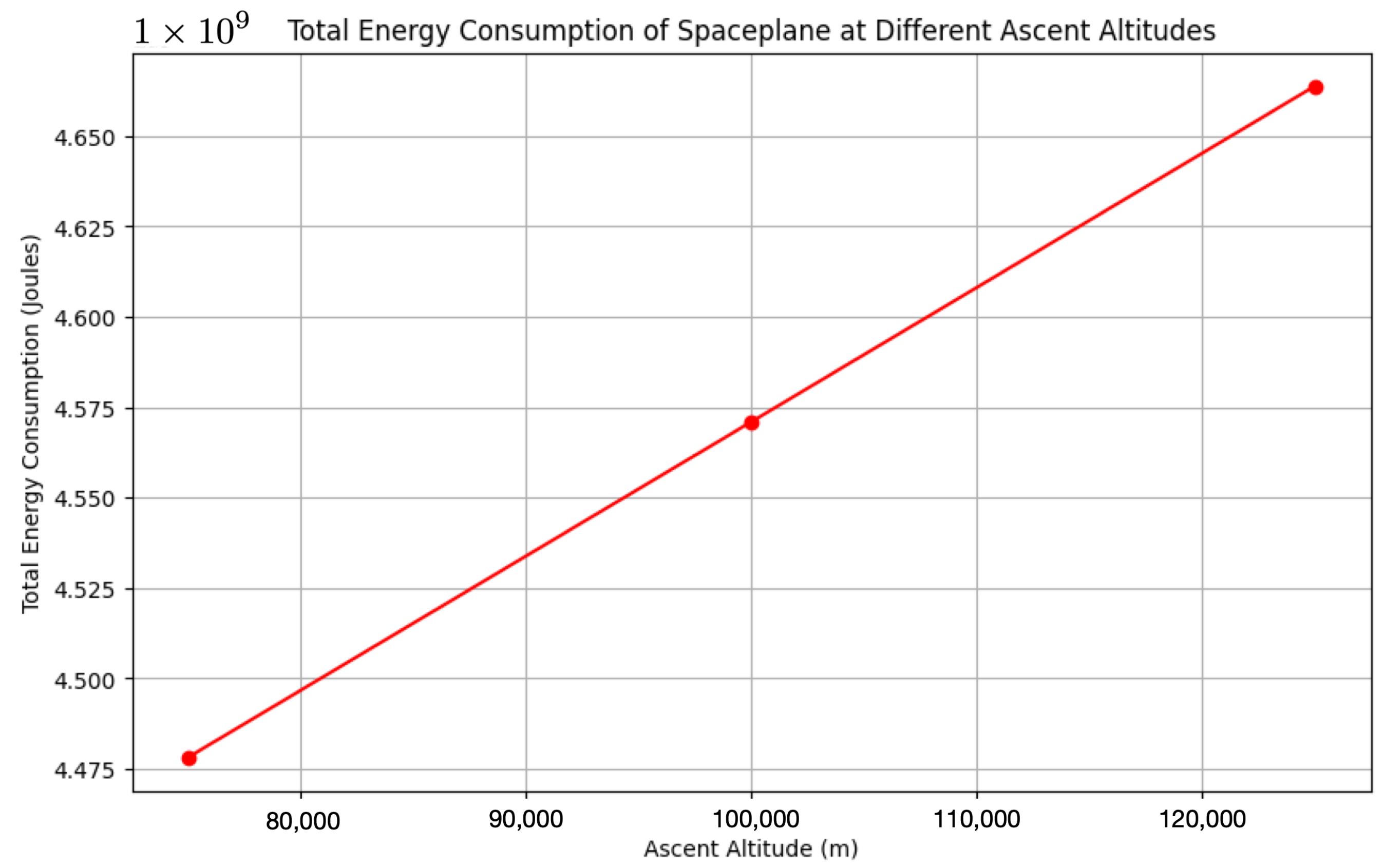{kind=link}
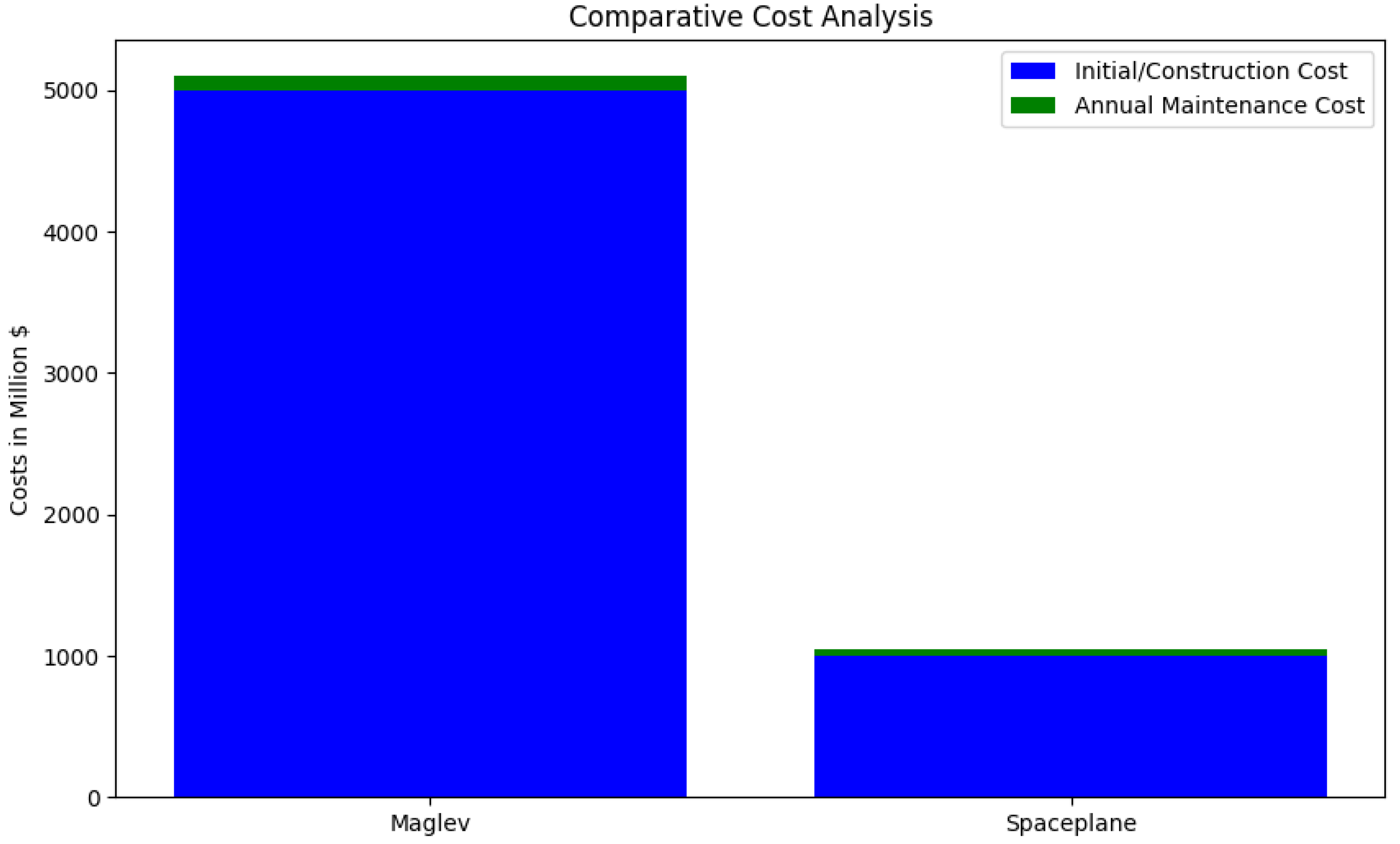{kind=link}
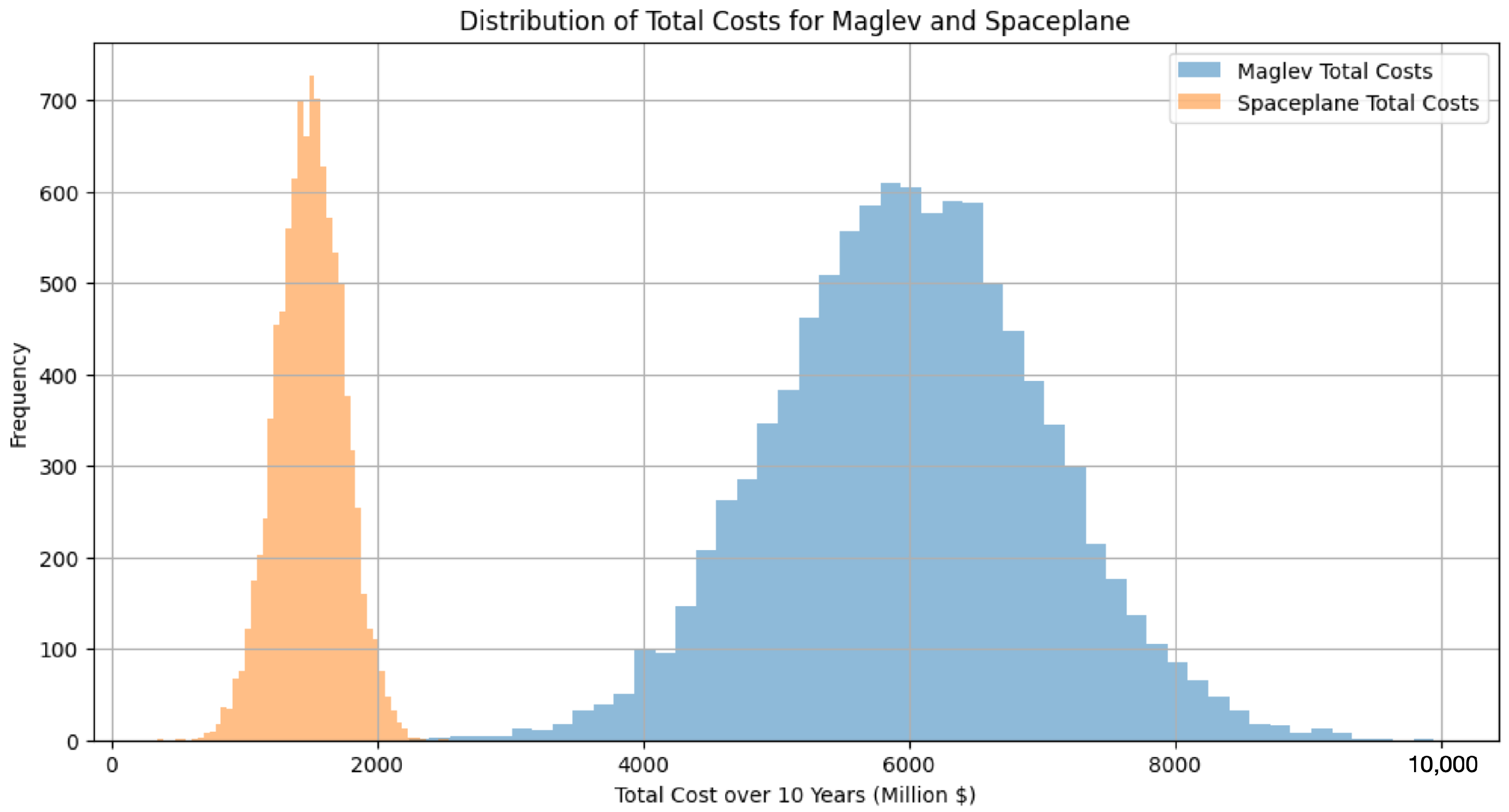{kind=link}
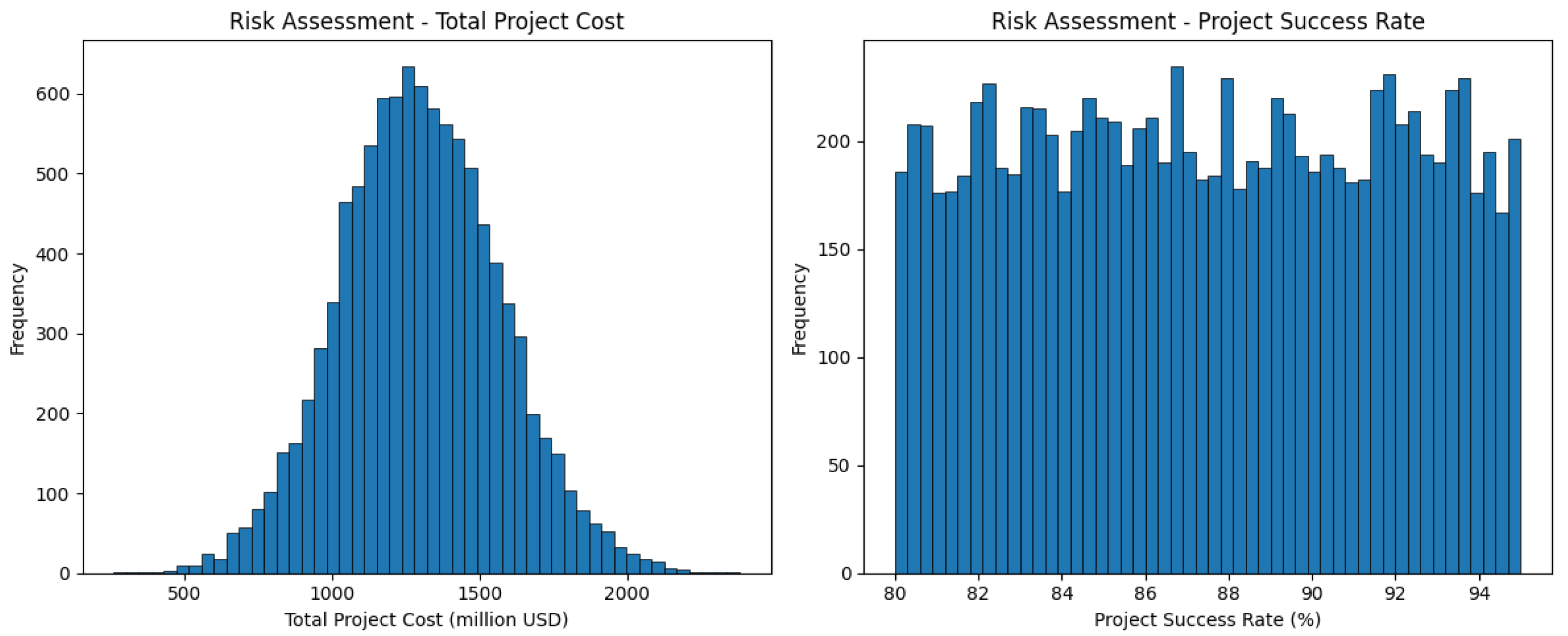{kind=link}
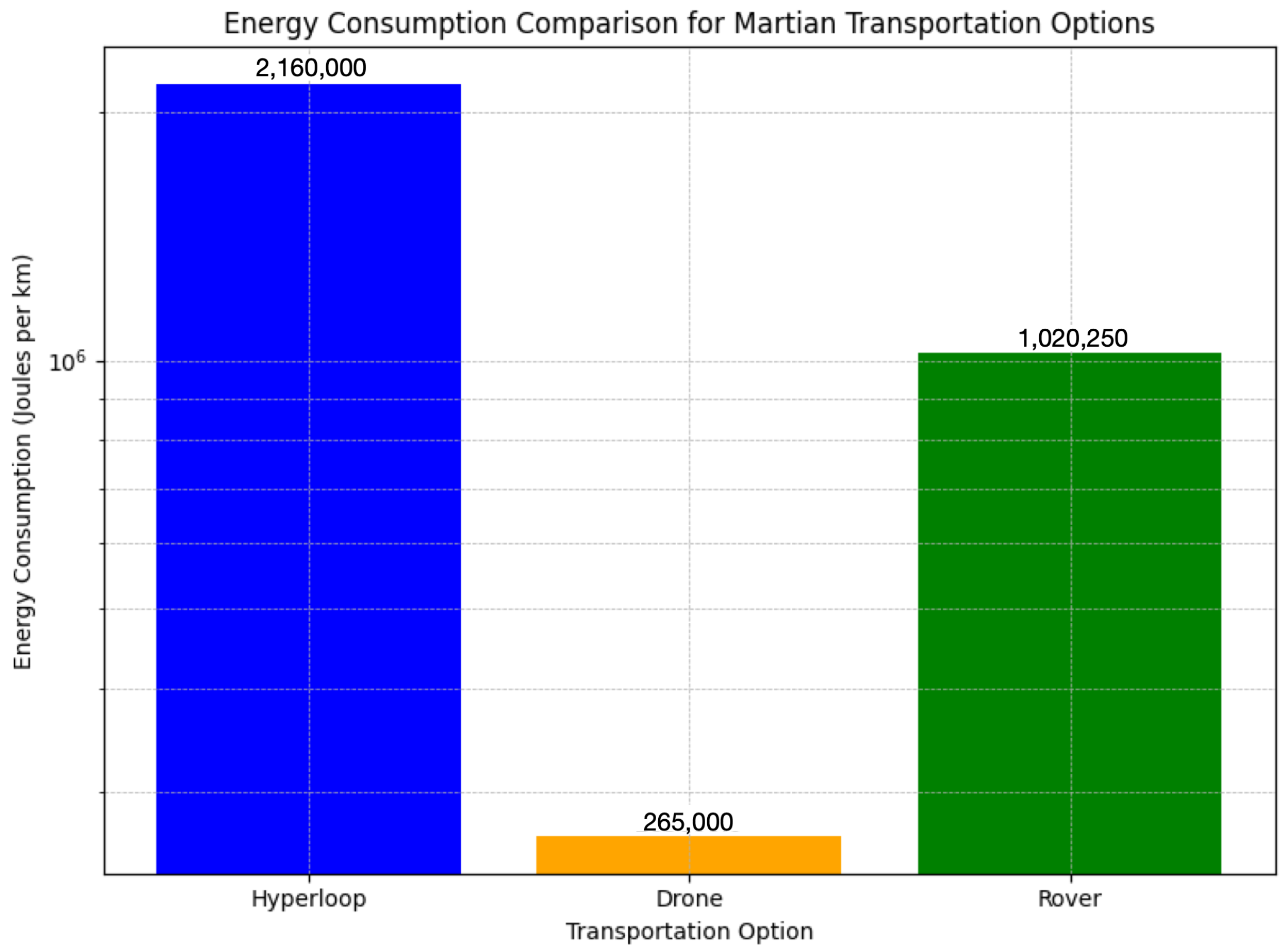{kind=link}
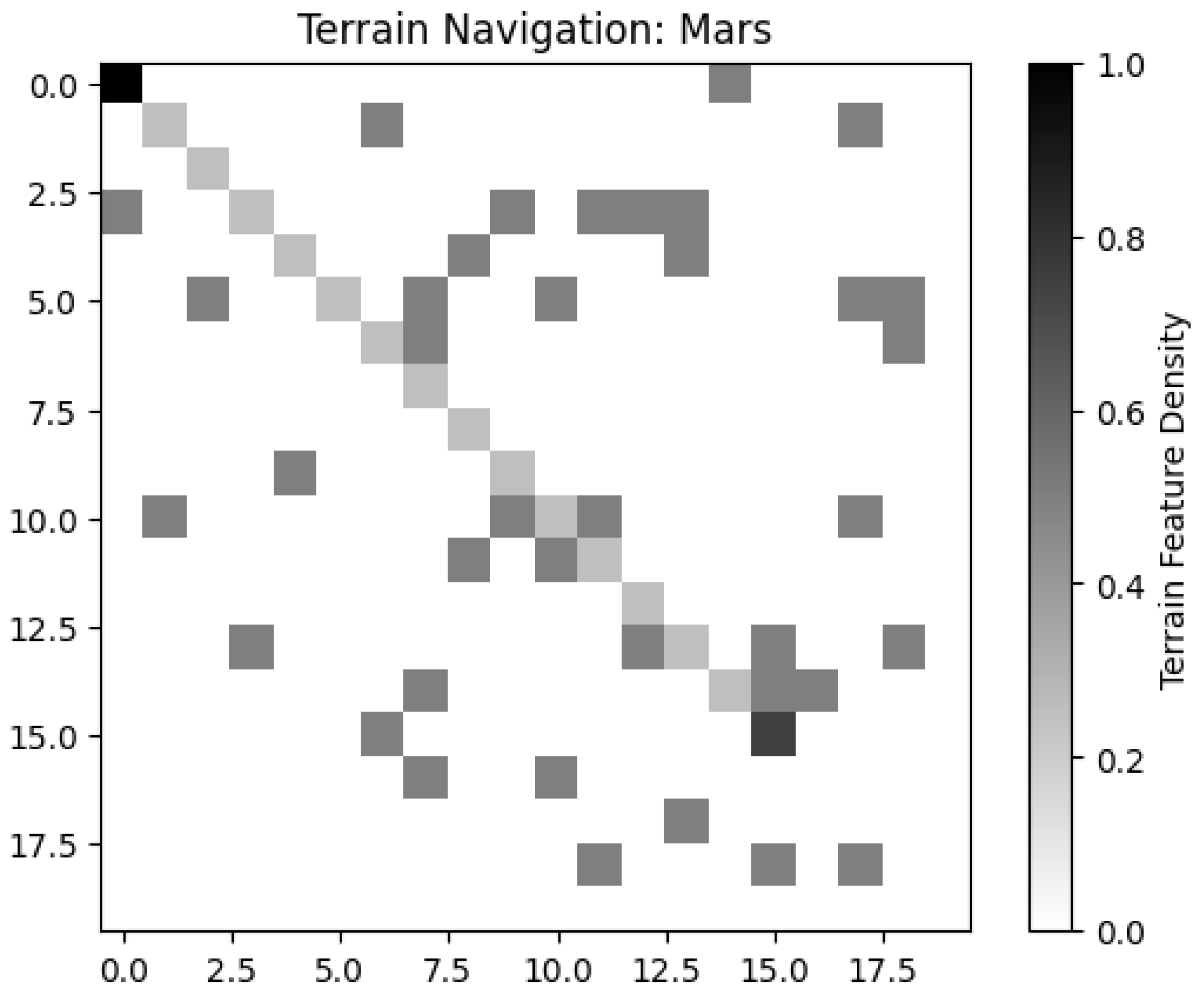{kind=link}
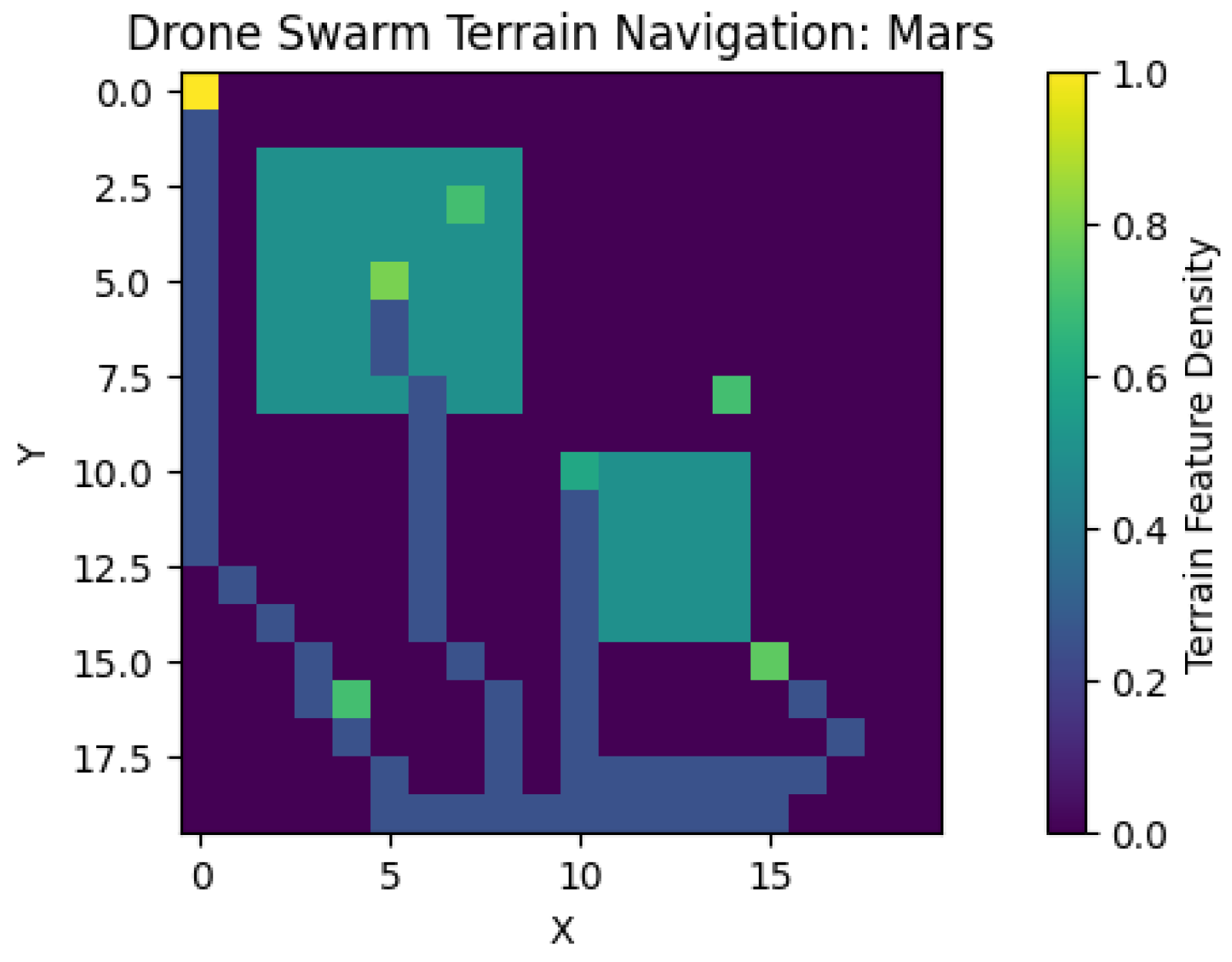{kind=link}
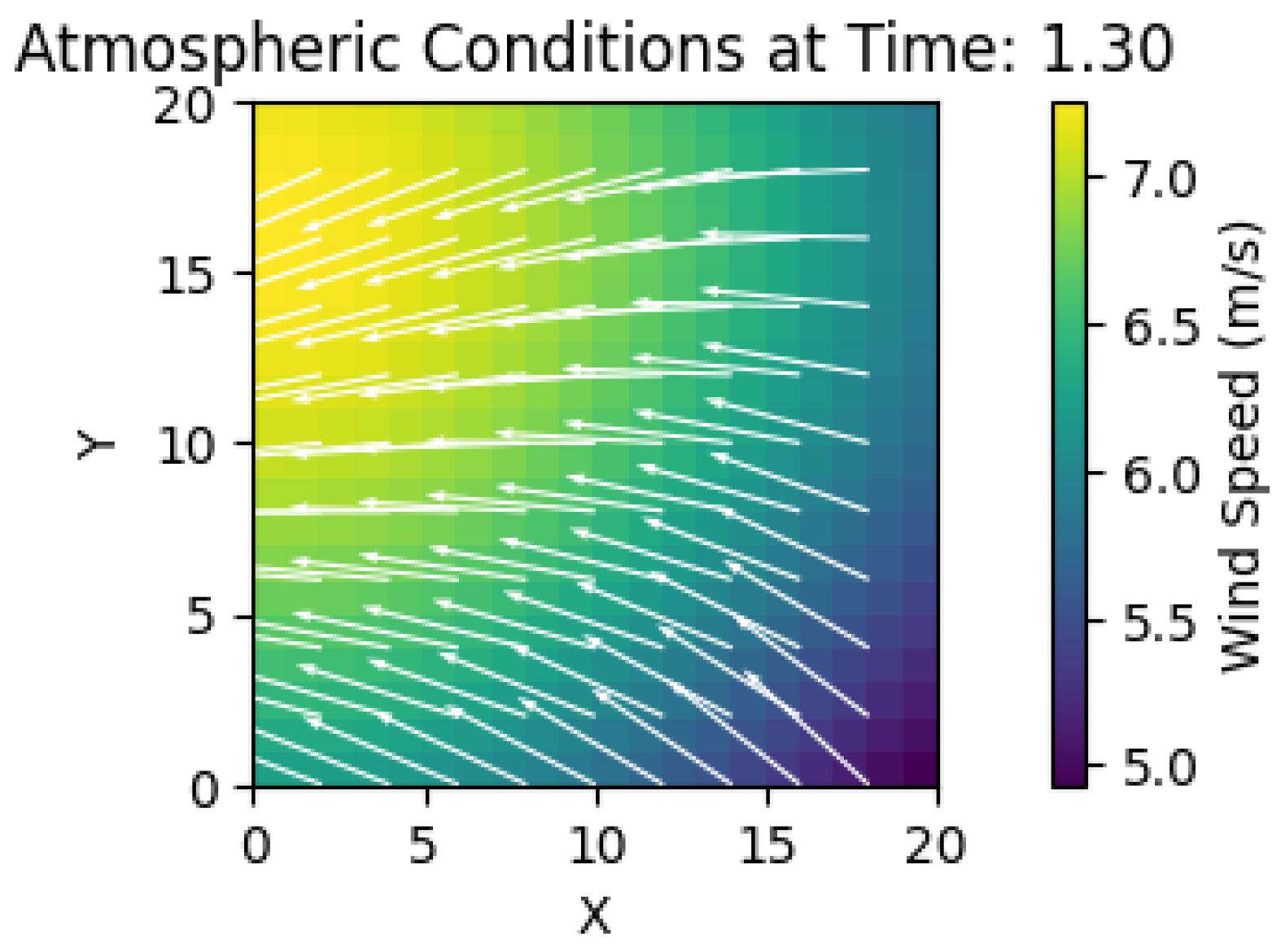{kind=link}








