
Enhancing Electric Bus Charging Scheduling: An Energy-Integrated Dynamic Bus Replacement Strategy with Time-of-Use Pricing

Abstract
:1. Introduction
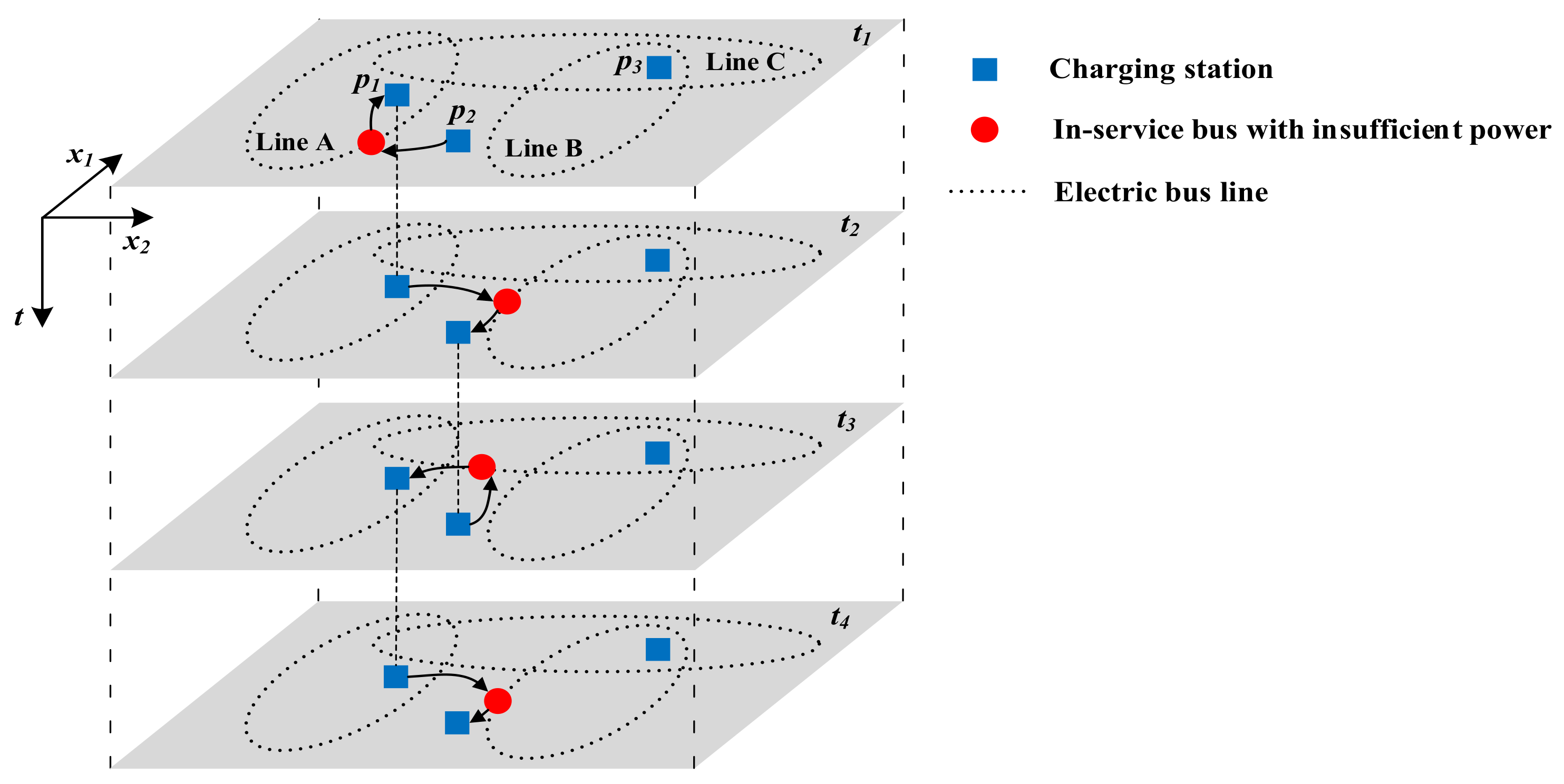
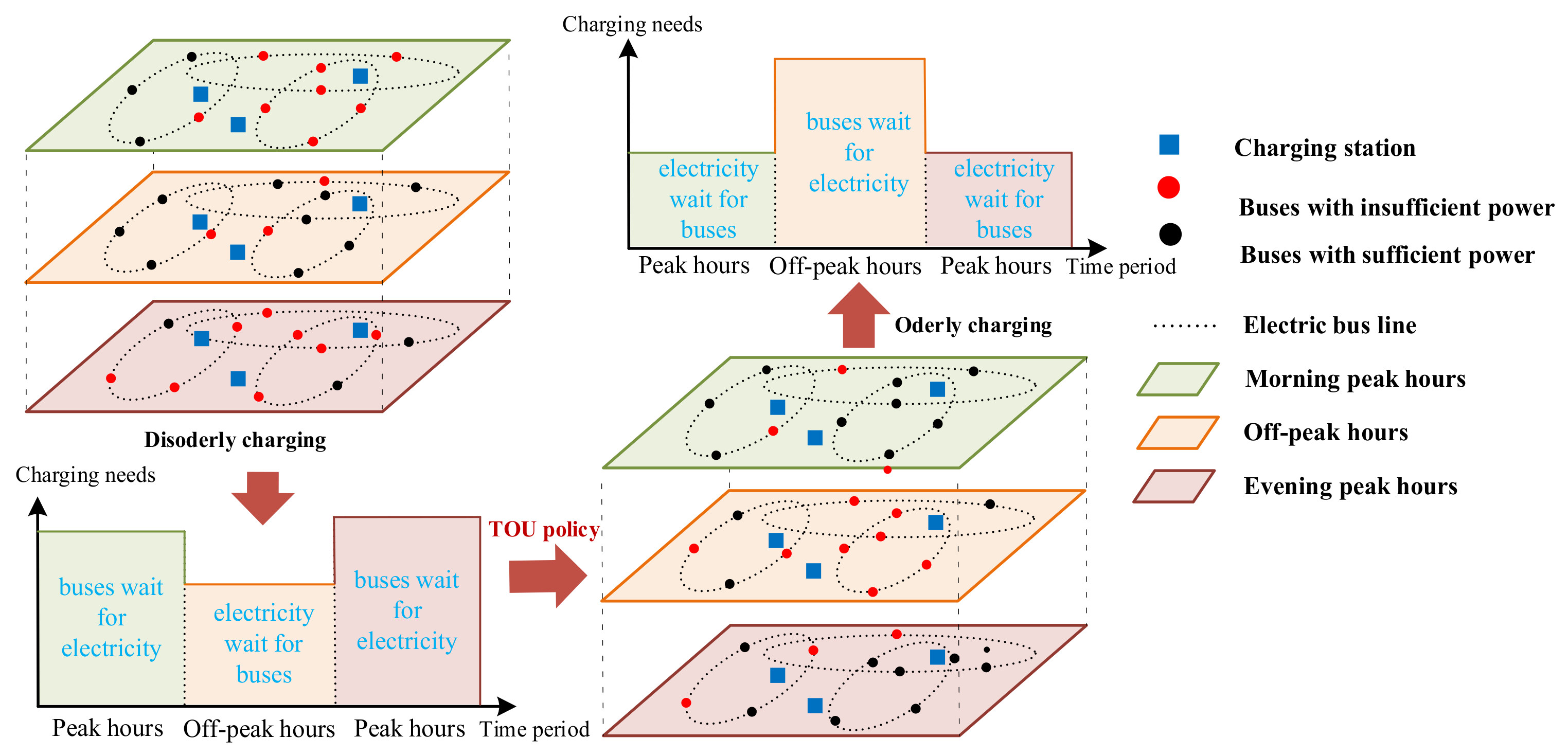
2. Problem Description
3. Model Formulation
3.1. Model Constraints
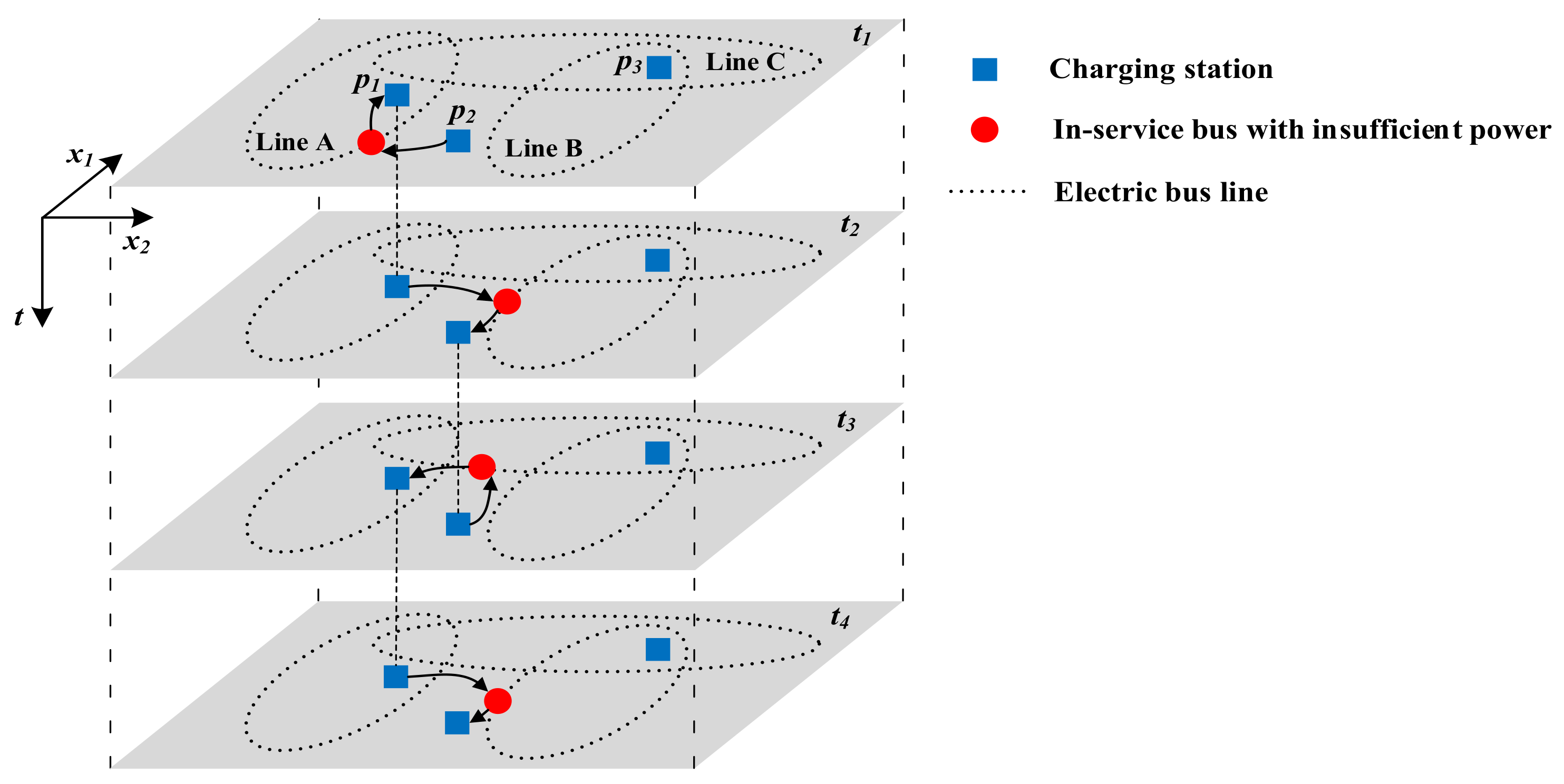
3.1.1. The Bus Replacement Strategy
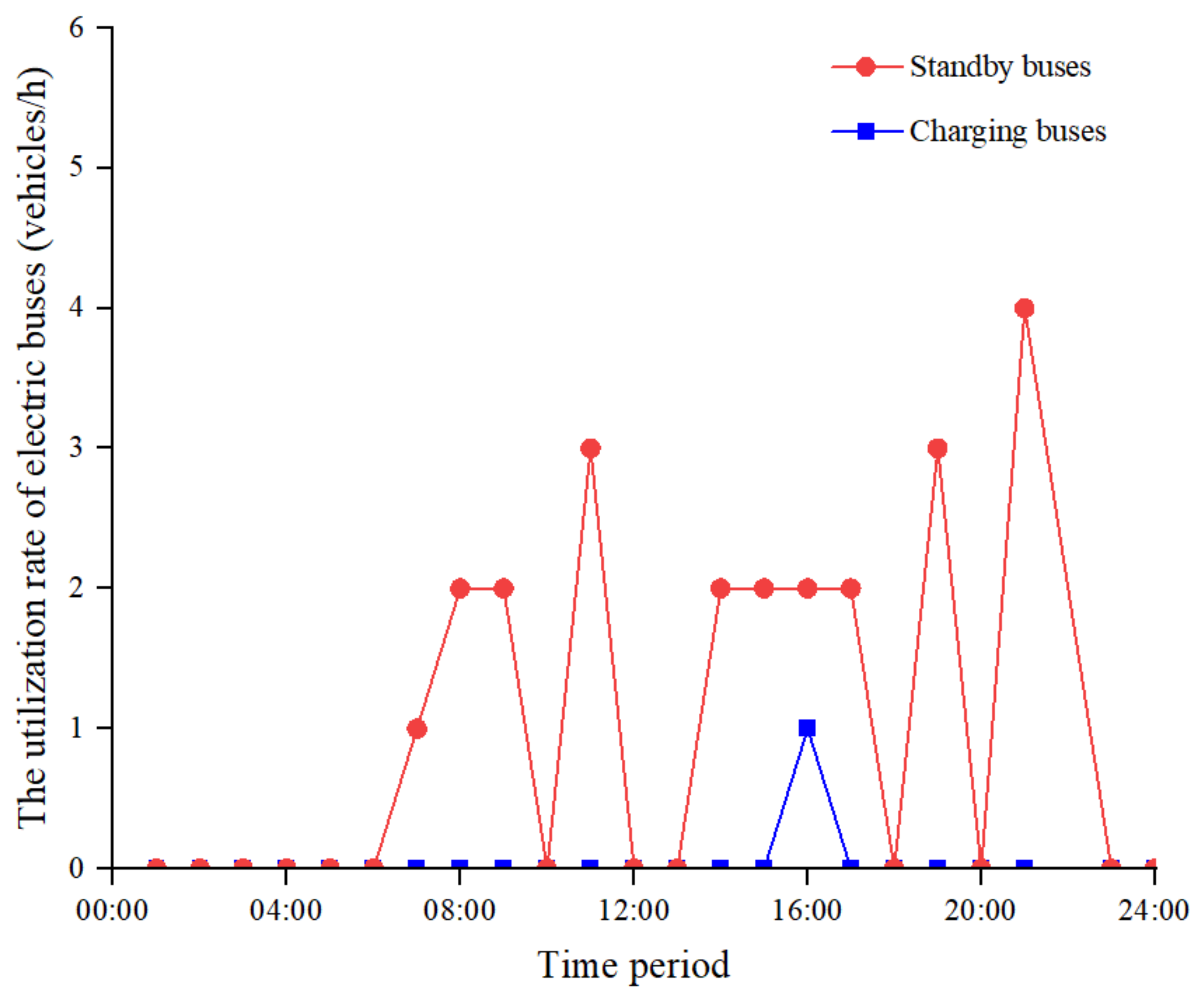
3.1.2. Scheduling Optimization for Standby Buses
3.1.3. Updating the Remaining Battery Energy for In-Service Buses
3.1.4. Updating the Remaining Battery Energy for Standby Buses
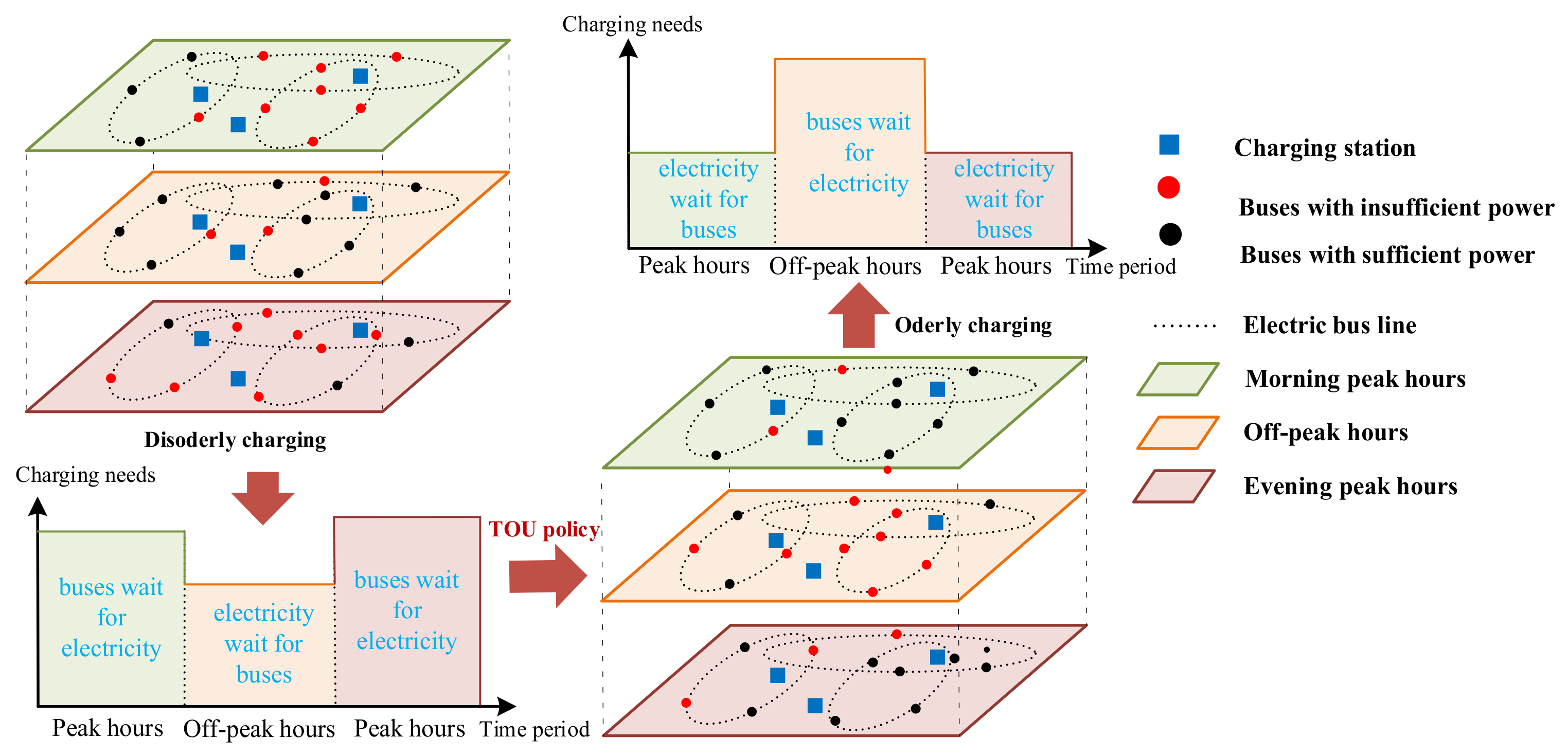
3.1.5. Charging Behaviors of Standby Buses under Time-of-Use Electricity Price Policy
3.2. Objective Function
4. Model Linearization and Solution
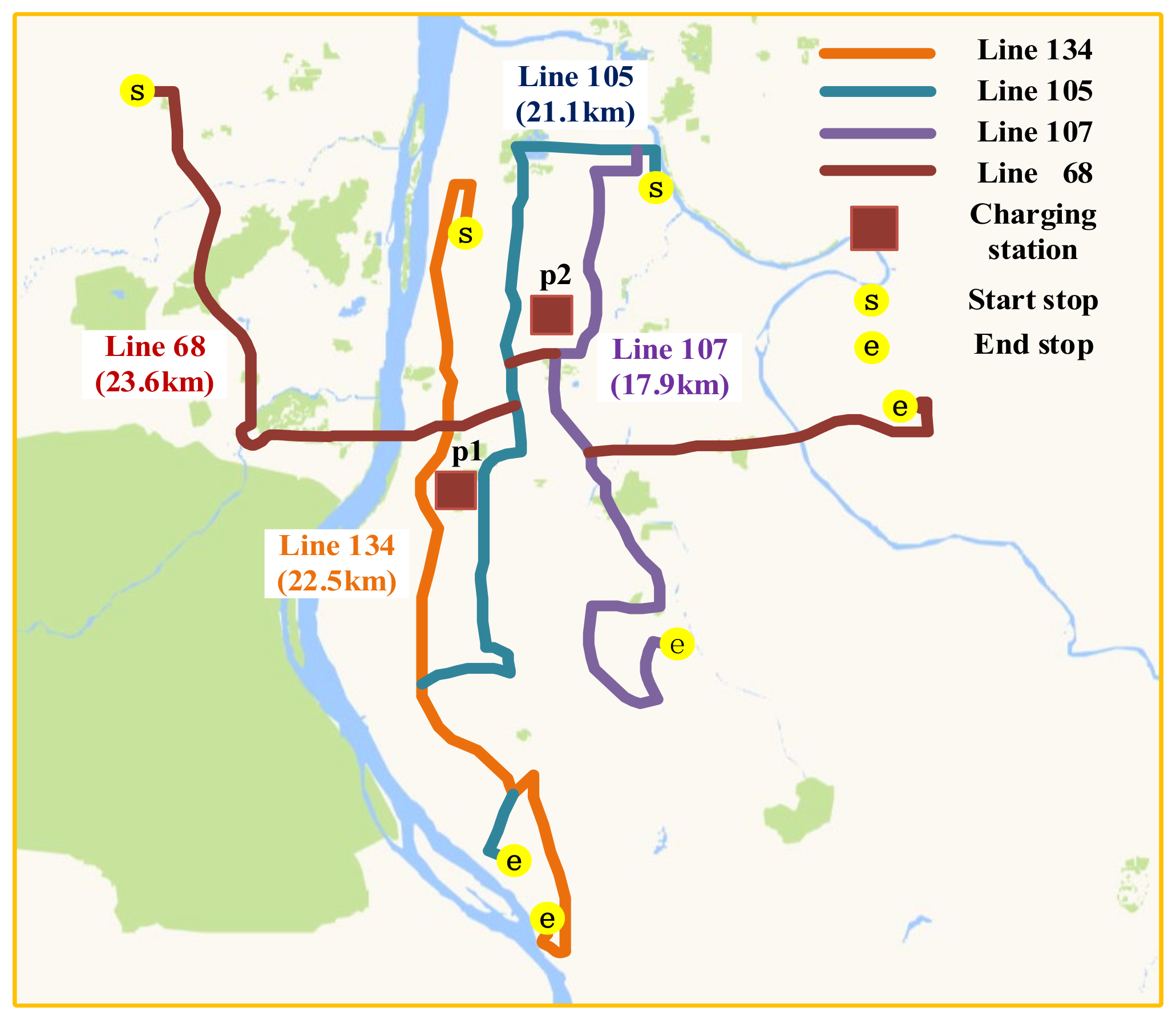
5. Model Validation
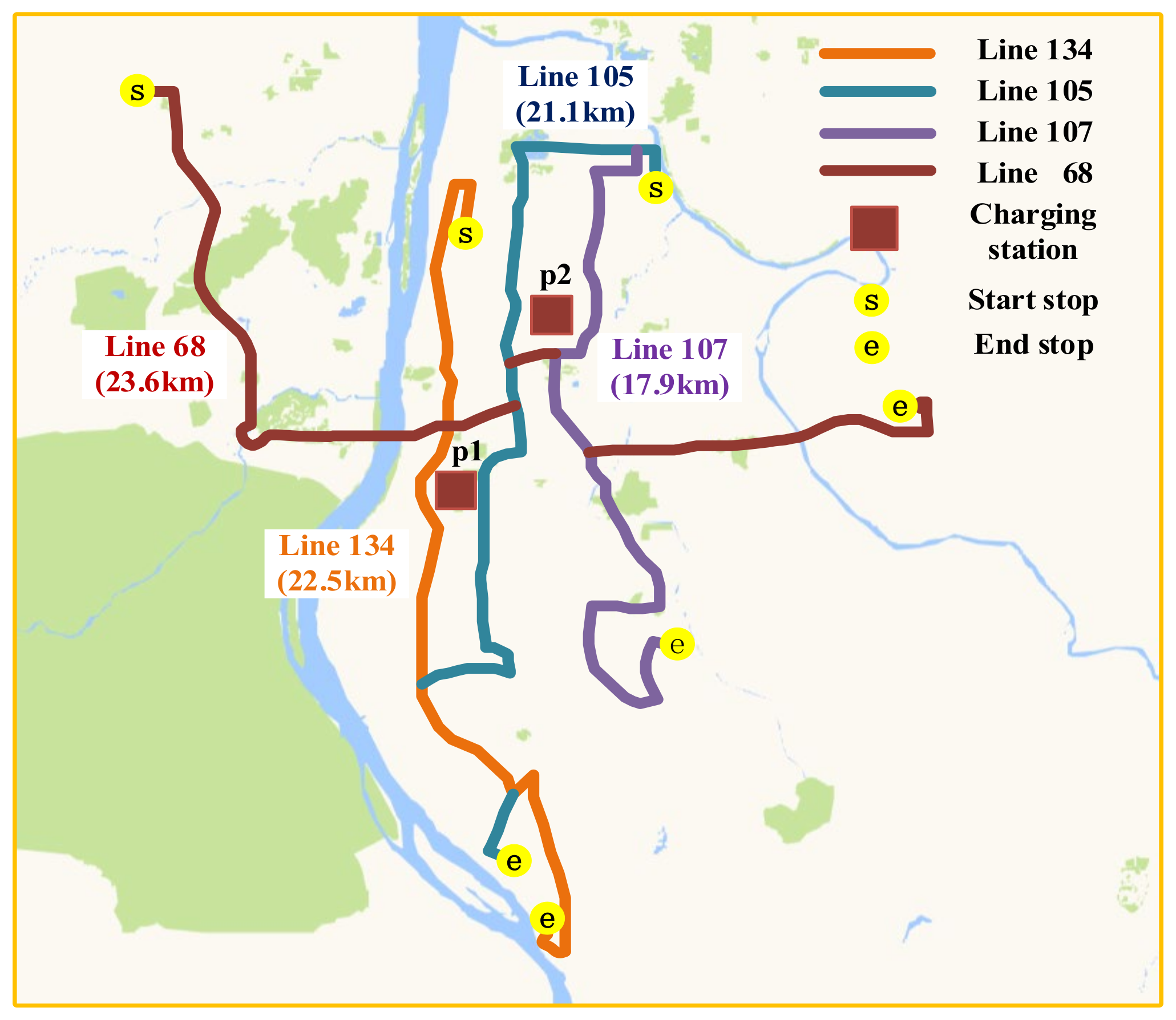
5.1. Parameter Inputs
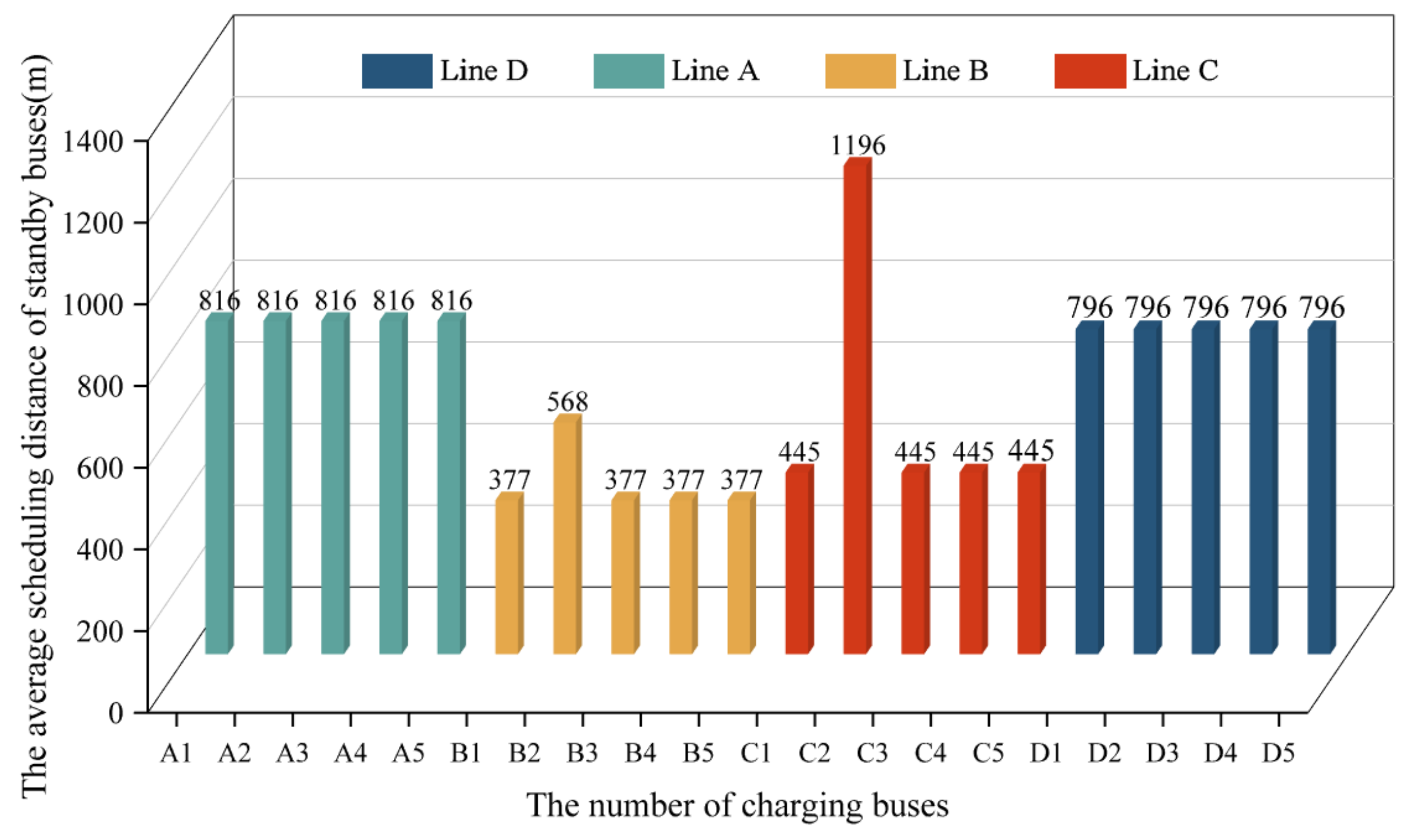
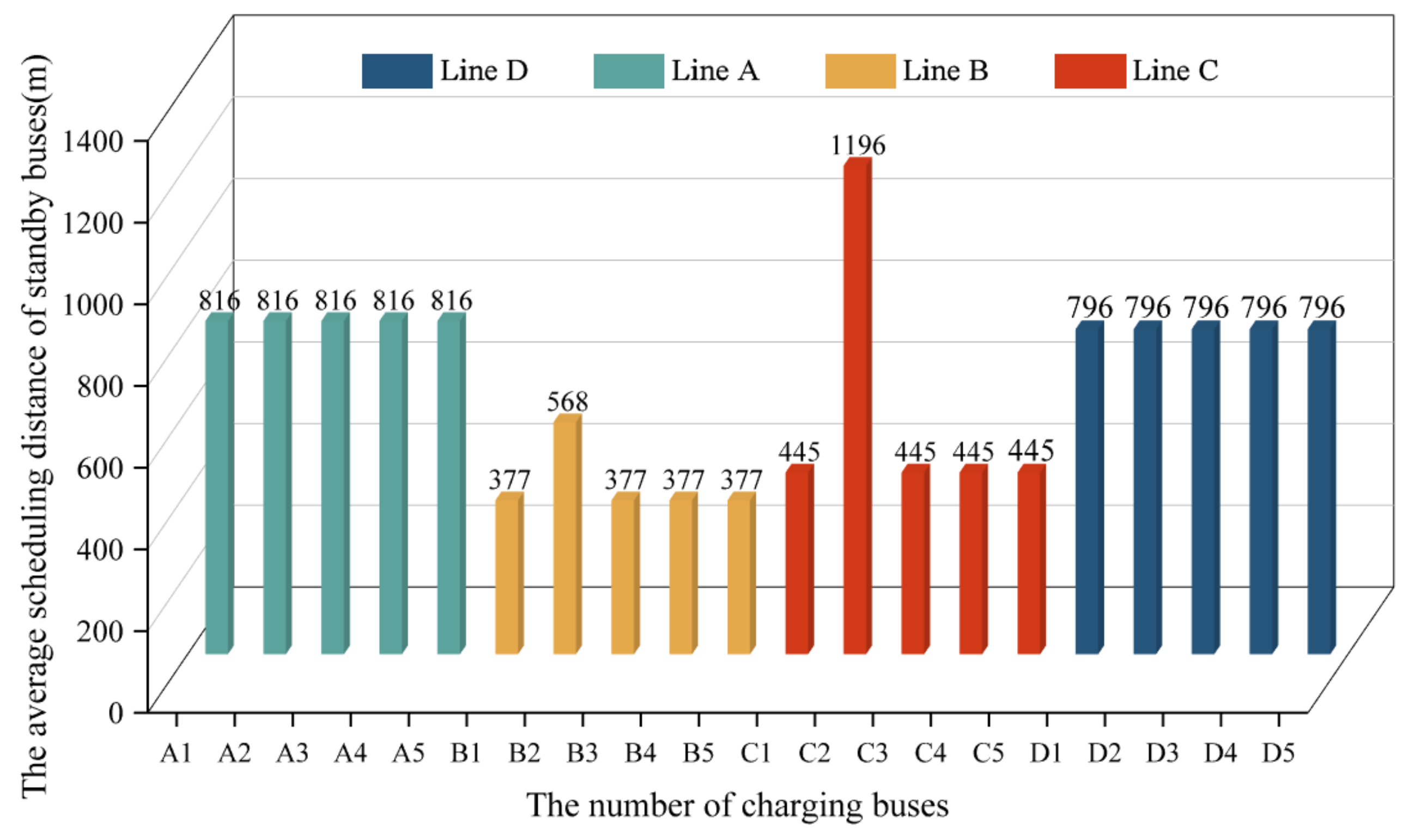
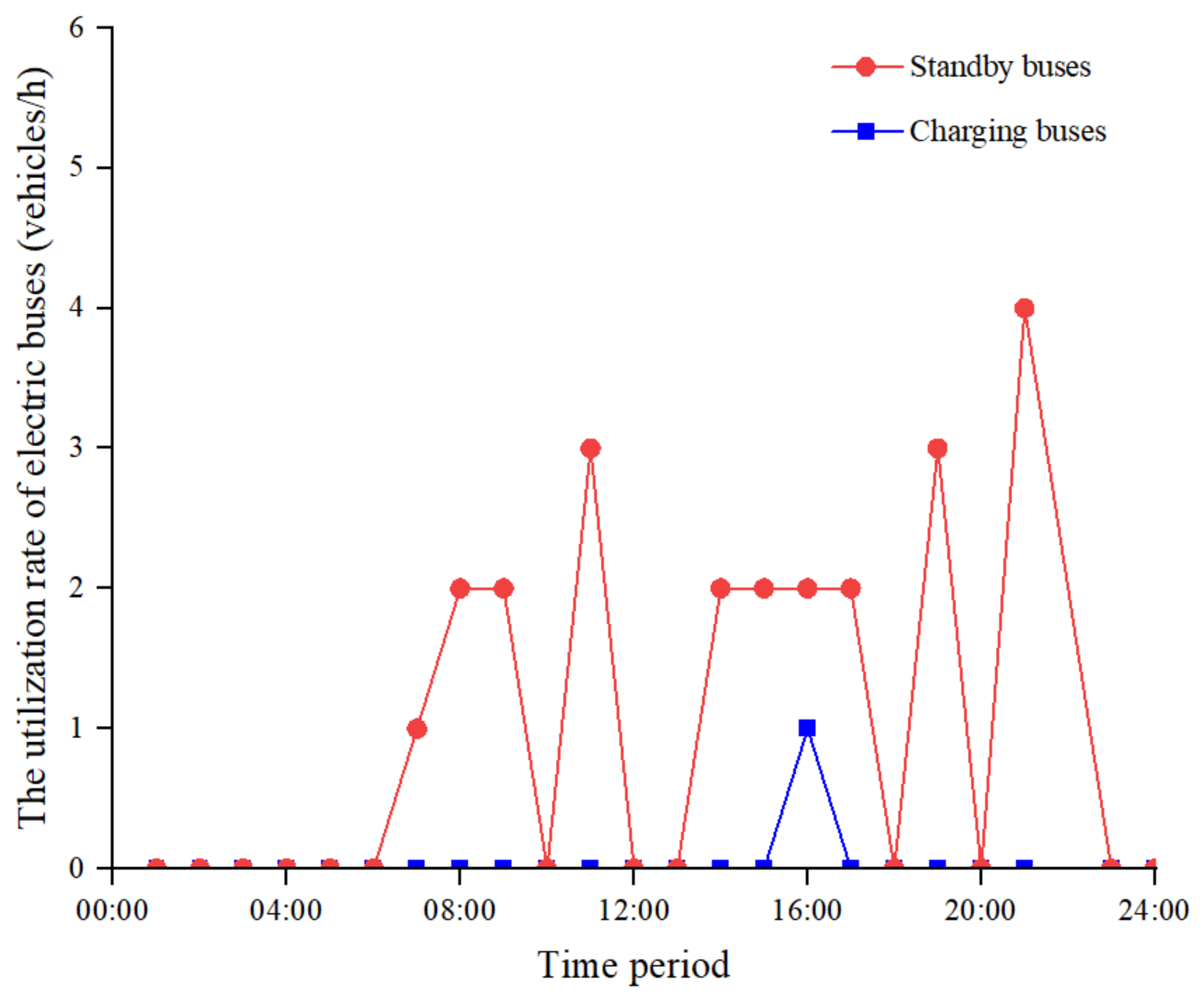
5.2. Results’ Analysis and Evaluation
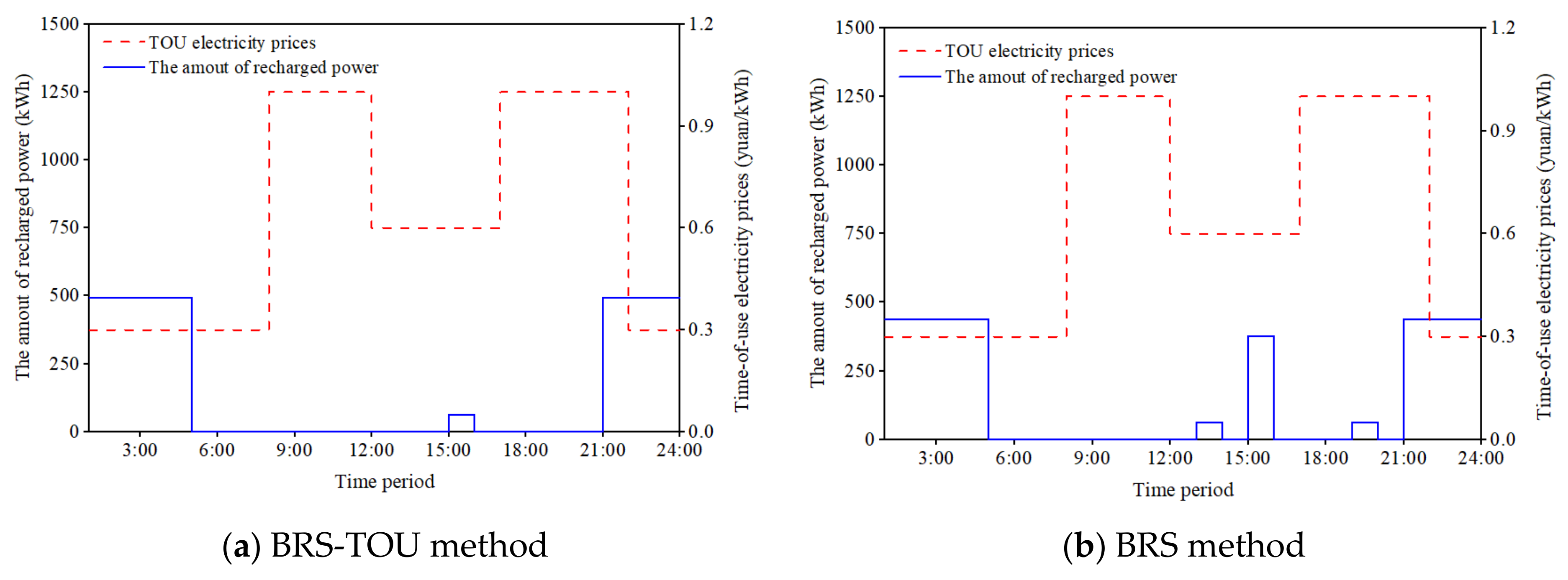
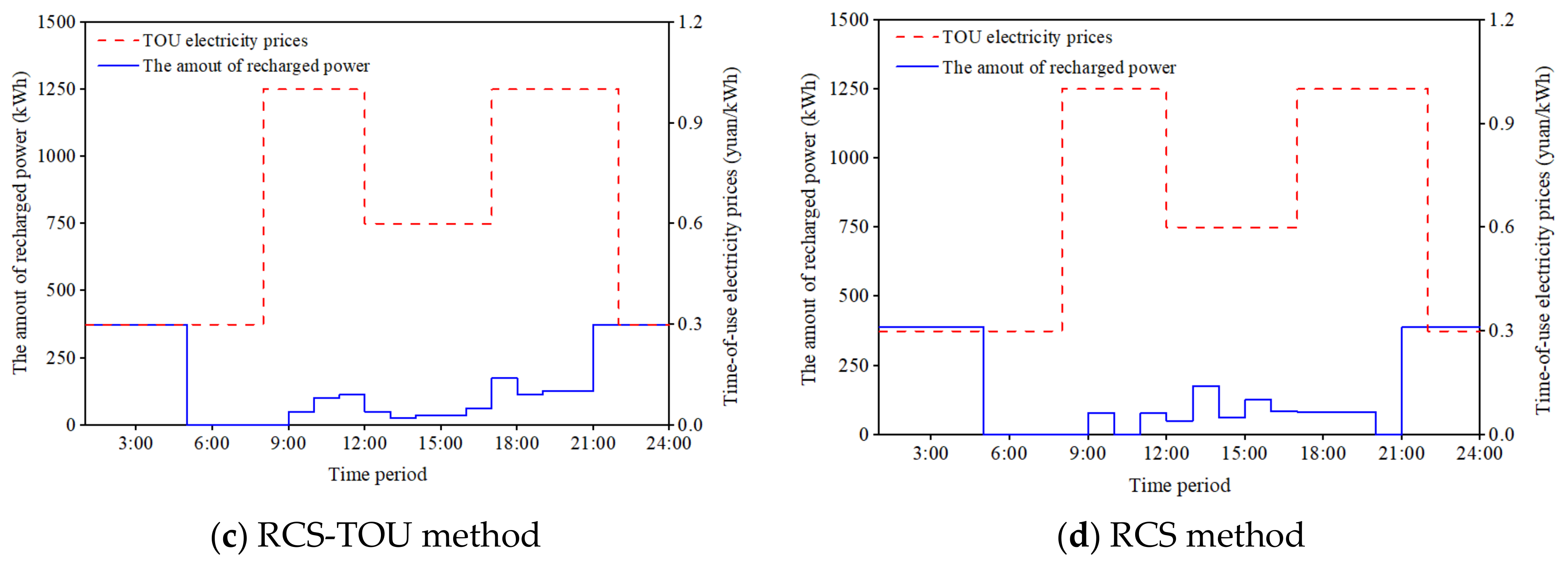
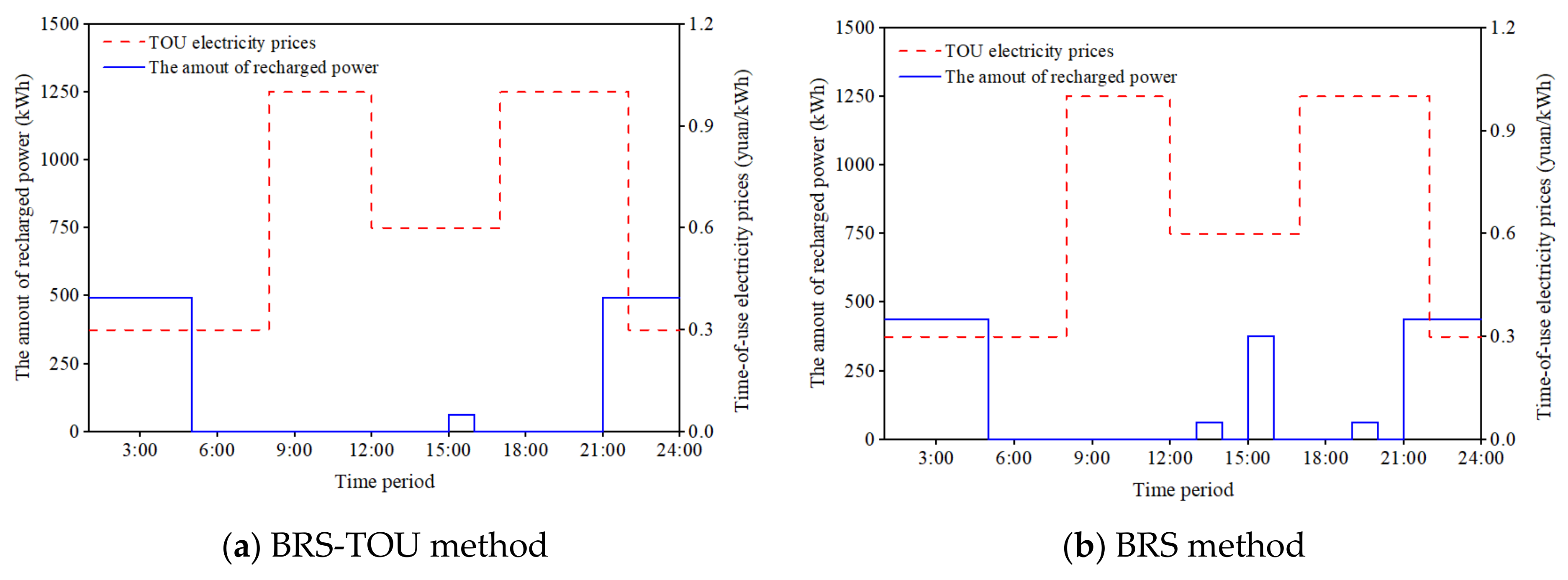
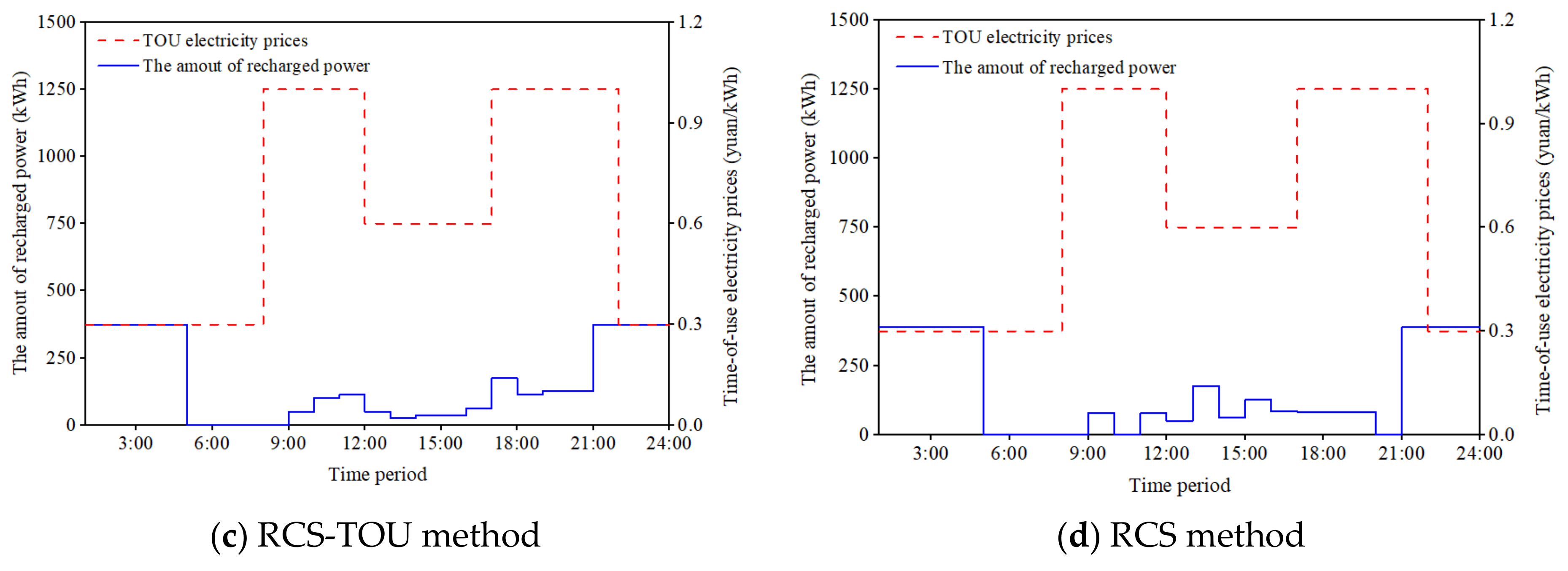
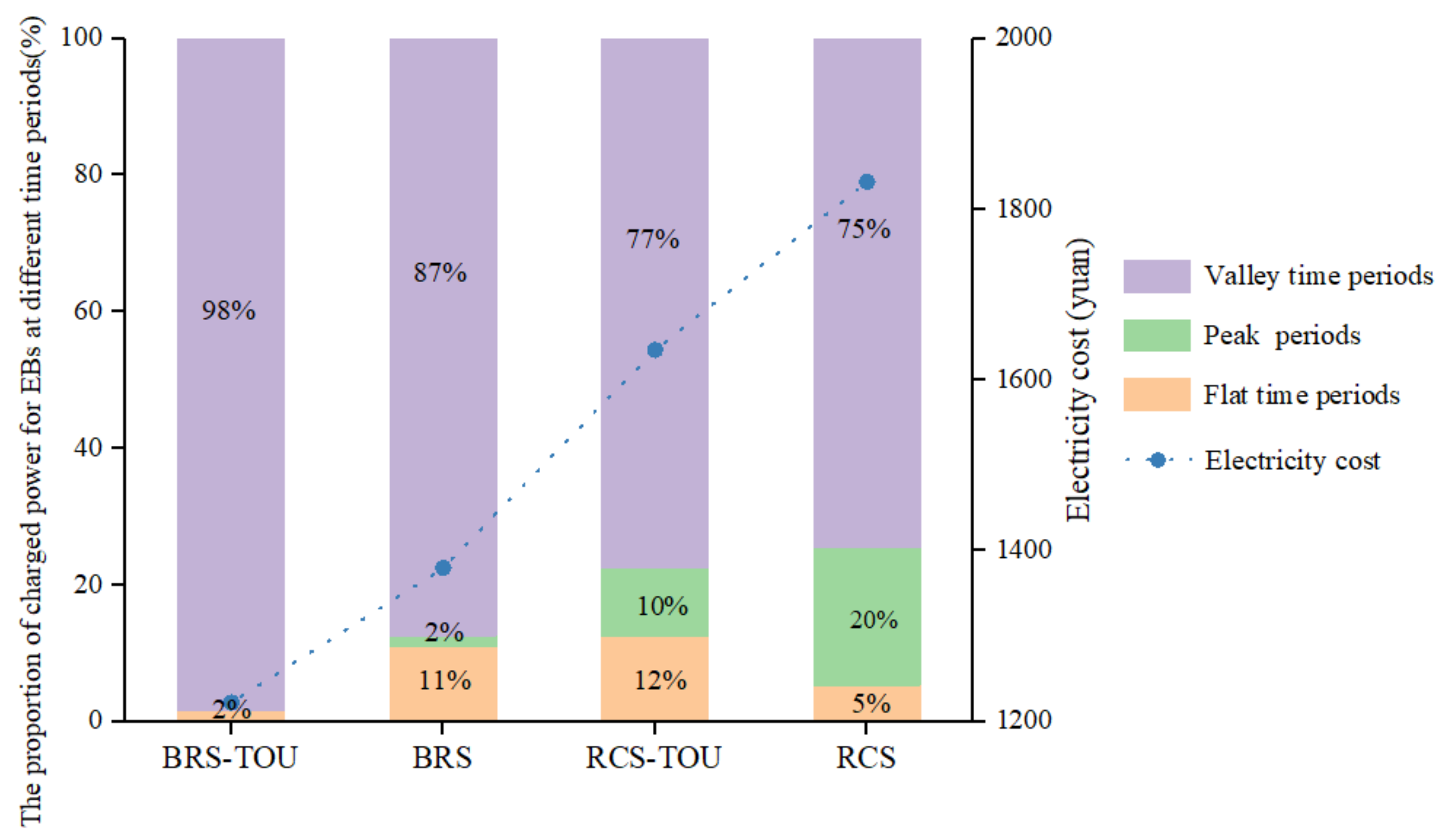
5.3. Model Comparison
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xylia, M.; Leduc, S.; Patrizio, P.; Silveira, S.; Kraxner, F. Developing a dynamic optimization model for electric bus charging infrastructure. Transp. Res. Procedia 2017, 27, 776–783. [Google Scholar] [CrossRef]
- Hu, X.; Lei, H.; Deng, D.; Bi, Y.; Zhao, J.; Wang, R. A two-stage approach to siting electric bus charging stations considering future-current demand. J. Clean. Prod. 2023, 434, 139962. [Google Scholar] [CrossRef]
- Bie, Y.; Liu, Y.; Li, S.; Wang, L. HVAC operation planning for electric bus trips based on chance-constrained programming. Energy 2022, 258, 124807. [Google Scholar] [CrossRef]
- Liu, Z.; Song, Z.; He, Y. Optimal Deployment of Dynamic Wireless Charging Facilities for an Electric Bus System. Transp. Res. Rec. J. Transp. Res. Board 2017, 2647, 100–108. [Google Scholar] [CrossRef]
- Wang, J.; Rakha, H.A. Modeling fuel consumption of hybrid electric buses: Model development and comparison with conventional buses. Transp. Res. Rec. J. Transp. Res. Board 2016, 2539, 94–102. [Google Scholar] [CrossRef]
- Lim, L.K.; Ab Muis, Z.; Ho, W.S.; Hashim, H.; Chien, C.B.P. Review of the energy forecasting and scheduling model for electric buses. Energy 2022, 263, 125773. [Google Scholar] [CrossRef]
- Jiang, M.; Zhang, Y.; Zhang, Y. Optimal electric bus scheduling under travel time uncertainty: A robust model and solution method. J. Adv. Transp. 2021, 2021, 1191443. [Google Scholar] [CrossRef]
- Lajunen, A. Lifecycle costs and charging requirements of electric buses with different charging methods. J. Clean. Prod. 2018, 172, 56–67. [Google Scholar] [CrossRef]
- Yan, M.; He, H.; Li, M.; Li, G.; Zhang, X.; Chen, Z. A comprehensive life cycle assessment on dual-source pure electric bus. J. Clean. Prod. 2020, 276, 122702. [Google Scholar] [CrossRef]
- Chen, Q.; Niu, C.; Tu, R.; Li, T.; Wang, A.; He, D. Cost-effective electric bus resource assignment based on optimized charging and decision robustness. Transp. Res. Part D Transp. Environ. 2023, 118, 103724. [Google Scholar] [CrossRef]
- Bie, Y.; Cong, Y.; Yang, M.; Wang, L. Coordinated Scheduling of Electric Buses for Multiple Routes Considering Stochastic Travel Times. J. Transp. Eng. Part A Syst. 2023, 149, 4023069. [Google Scholar] [CrossRef]
- Zhang, A.; Li, T.; Zheng, Y.; Li, X.; Abdullah, M.G.; Dong, C. Mixed electric bus fleet scheduling problem with partial mixed-route and partial recharging. Int. J. Sustain. Transp. 2022, 16, 73–83. [Google Scholar] [CrossRef]
- Huang, D.; Wang, S. A two-stage stochastic programming model of coordinated electric bus charging scheduling for a hybrid charging scheme. Multimodal Transp. 2022, 1, 100006. [Google Scholar] [CrossRef]
- Wang, J.; Rakha, H.A. Convex fuel consumption model for diesel and hybrid buses. Transp. Res. Rec. J. Transp. Res. Board 2017, 2647, 50–60. [Google Scholar] [CrossRef]
- Tang, C.; Li, X.; Ceder, A.; Wang, X. Public transport fleet replacement optimization using multi-type battery-powered electric buses. Transp. Res. Rec. J. Transp. Res. Board 2021, 2675, 1422–1431. [Google Scholar] [CrossRef]
- Li, L.; Lo, H.K.; Huang, W.; Xiao, F. Mixed bus fleet location-routing-scheduling under range uncertainty. Transp. Res. Part B Methodol. 2021, 146, 155–179. [Google Scholar] [CrossRef]
- Yao, E.; Liu, T.; Lu, T.; Yang, Y. Optimization of electric vehicle scheduling with multiple vehicle types in public transport. Sustain. Cities Soc. 2020, 52, 101862. [Google Scholar] [CrossRef]
- Liu, Z.; Song, Z.; He, Y. Economic Analysis of On-Route Fast Charging for Battery Electric Buses: Case Study in Utah. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 119–130. [Google Scholar] [CrossRef]
- Zeng, B.; Wu, W.; Ma, C. Electric bus scheduling and charging infrastructure planning considering bus replacement strategies at charging stations. IEEE Access 2023, 11, 125328–125345. [Google Scholar] [CrossRef]
- Liu, K.; Gao, H.; Liang, Z.; Zhao, M.; Li, C. Optimal charging strategy for large-scale electric buses considering resource constraints. Transp. Res. Part D Transp. Environ. 2021, 99, 103009. [Google Scholar] [CrossRef]
- He, Y.; Liu, Z.; Song, Z. Optimal charging scheduling and management for a fast-charging battery electric bus system. Transp. Res. Part E Logist. Transp. Rev. 2020, 142, 102056. [Google Scholar] [CrossRef]
- Gabriel, N.R.; Martin, K.K.; Haslam, S.J.; Faile, J.C.; Kamens, R.M.; Gheewala, S.H. A comparative life cycle assessment of electric, compressed natural gas, and diesel buses in Thailand. J. Clean. Prod. 2021, 314, 128013. [Google Scholar] [CrossRef]
- An, K.; Jing, W.; Kim, I. Battery-swapping facility planning for electric buses with local charging systems. Int. J. Sustain. Transp. 2020, 14, 489–502. [Google Scholar] [CrossRef]
- An, K. Battery electric bus infrastructure planning under demand uncertainty. Transp. Res. Part C Emerg. Technol. 2020, 111, 572–587. [Google Scholar] [CrossRef]
- Bie, Y.; Ji, J.; Wang, X.; Qu, X. Optimization of electric bus scheduling considering stochastic volatilities in trip travel time and energy consumption. Comput. Aided Civ. Infrastruct. Eng. 2021, 36, 1530–1548. [Google Scholar] [CrossRef]
- Liu, T.; Ceder, A.A. Battery-electric transit vehicle scheduling with optimal number of stationary chargers. Transp. Res. Part C Emerg. Technol. 2020, 114, 118–139. [Google Scholar] [CrossRef]
- Ma, X.; Miao, R.; Wu, X.; Liu, X. Examining influential factors on the energy consumption of electric and diesel buses: A data-driven analysis of large-scale public transit network in Beijing. Energy 2021, 216, 119196. [Google Scholar] [CrossRef]
- Abdelwahed, A.; van den Berg, P.L.; Brandt, T.; Collins, J.; Ketter, W. Evaluating and optimizing opportunity fast-charging schedules in transit battery electric bus networks. Transp. Sci. 2020, 54, 1601–1615. [Google Scholar] [CrossRef]
- Hu, H.; Du, B.; Liu, W.; Perez, P. A joint optimisation model for charger locating and electric bus charging scheduling considering opportunity fast charging and uncertainties. Transp. Res. Part C Emerg. Technol. 2022, 141, 103732. [Google Scholar] [CrossRef]
- Liu, Z.; Song, Z.; He, Y. Planning of Fast-Charging Stations for a Battery Electric Bus System under Energy Consumption Uncertainty. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 96–107. [Google Scholar] [CrossRef]
- Bi, Z.; De Kleine, R.; Keoleian, G.A. Integrated Life Cycle Assessment and Life Cycle Cost Model for Comparing Plug—In versus Wireless Charging for an Electric Bus System. J. Ind. Ecol. 2017, 21, 344–355. [Google Scholar] [CrossRef]
- Bi, Z.; Keoleian, G.A.; Ersal, T. Wireless charger deployment for an electric bus network: A multi-objective life cycle optimization. Appl. Energy 2018, 225, 1090–1101. [Google Scholar] [CrossRef]
- Lithium-ion Battery Aging. Available online: https://www.wattalps.com/lithium-ion-battery-aging/ (accessed on 24 March 2024).
- IEA Global EV Outlook 2020. Available online: https://www.iea.org/reports/global-ev-outlook-2020 (accessed on 24 March 2024).
- Alamatsaz, K.; Hussain, S.; Lai, C.; Eicker, U. Electric bus scheduling and timetabling, fast charging infrastructure planning, and their impact on the grid: A review. Energies 2022, 15, 7919. [Google Scholar] [CrossRef]
- He, Y.; Song, Z.; Liu, Z. Fast-charging station deployment for battery electric bus systems considering electricity demand charges. Sustain. Cities Soc. 2019, 48, 101530. [Google Scholar] [CrossRef]
- Xie, S.; Hu, X.; Xin, Z.; Brighton, J. Pontryagin’s minimum principle based model predictive control of energy management for a plug-in hybrid electric bus. Appl. Energy 2019, 236, 893–905. [Google Scholar] [CrossRef]
- Focusing on Emerging Energy Infrastructure, Emphasizing the Impact of Large-Scale Uncoordinated Charging|Bottom-Line Cities. Available online: https://www.163.com/dy/article/IT5I94JB0514R9P4.html (accessed on 24 March 2024).
- Liu, X.; Qu, X.; Ma, X. Optimizing electric bus charging infrastructure considering power matching and seasonality. Transp. Res. Part D Transp. Environ. 2021, 100, 103057. [Google Scholar] [CrossRef]
- He, J.; Yan, N.; Zhang, J.; Yu, Y.; Wang, T. Battery electric buses charging schedule optimization considering time-of-use electricity price. J. Intell. Connect. Veh. 2022, 5, 138–145. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, L.; Zeng, Z.; Bie, Y. Optimal charging plan for electric bus considering time-of-day electricity tariff. J. Intell. Connect. Veh. 2022, 5, 123–137. [Google Scholar] [CrossRef]
- Zhang, W.; Zhao, H.; Xu, M. Optimal operating strategy of short turning lines for the battery electric bus system. Commun. Transp. Res. 2021, 1, 100023. [Google Scholar] [CrossRef]
- Li, X.; Wang, T.; Li, L.; Feng, F.; Wang, W.; Cheng, C. Joint optimization of regular charging electric bus transit network schedule and stationary charger deployment considering partial charging policy and time-of-use electricity prices. J. Adv. Transp. 2020, 2020, 8863905. [Google Scholar] [CrossRef]
- Muratori, M. Impact of uncoordinated plug-in electric vehicle charging on residential power demand. Nat. Energy 2018, 3, 193–201. [Google Scholar] [CrossRef]
- Ray, S.; Kasturi, K.; Patnaik, S.; Nayak, M.R. Review of electric vehicles integration impacts in distribution networks: Placement, charging/discharging strategies, objectives and optimisation models. J. Energy Storage 2023, 72, 108672. [Google Scholar] [CrossRef]
- Usman, M.; Tareen, W.U.K.; Amin, A.; Ali, H.; Bari, I.; Sajid, M.; Seyedmahmoudian, M.; Stojcevski, A.; Mahmood, A.; Mekhilef, S. A coordinated charging scheduling of electric vehicles considering optimal charging time for network power loss minimization. Energies 2021, 14, 5336. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Y.; Gu, W.; Han, Y.; Chung, E.; Qu, X. On the role of time-of-use electricity price in charge scheduling for electric bus fleets. Comput.-Aided Civ. Infrastruct. Eng. 2023, 39, 1218–1237. [Google Scholar] [CrossRef]
- Petit, A.; Lei, C.; Ouyang, Y. Multiline bus bunching control via vehicle substitution. Transp. Res. Part B Methodol. 2019, 126, 68–86. [Google Scholar] [CrossRef]
- Petit, A.; Ouyang, Y.; Lei, C. Dynamic bus substitution strategy for bunching intervention. Transp. Res. Part B Methodol. 2018, 115, 1–16. [Google Scholar] [CrossRef]
- Zeng, W.; Liu, P.; Yang, C.; Sun, W.; Huang, Y.; Han, Y. En-route charging strategy for wirelessly charged electric bus considering time-of-use price. IEEE Access 2022, 10, 94063–94073. [Google Scholar] [CrossRef]
- Gairola, P.; Nezamuddin, N. Optimization framework for integrated battery electric bus planning and charging scheduling. Transp. Res. Part D Transp. Environ. 2023, 118, 103697. [Google Scholar] [CrossRef]
- Liu, W.; Yang, H.; Yin, Y. Efficiency of a highway use reservation system for morning commute. Transp. Res. Part C Emerg. Technol. 2015, 56, 293–308. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, W.; Lodewijks, G.; Travis Waller, S. The short-run and long-run equilibria for commuting with autonomous vehicles. Transp. B Transp. Dyn. 2022, 10, 803–830. [Google Scholar] [CrossRef]
- Li, L.; Lo, H.K.; Xiao, F. Mixed bus fleet scheduling under range and refueling constraints. Transp. Res. Part C Emerg. Technol. 2019, 104, 443–462. [Google Scholar] [CrossRef]
- Xiao, Y.; An, Y.; Li, T.; Wu, N.; He, W.; Li, P. Autonomous driving policy learning from demonstration using regression loss function. Knowl.-Based Syst. 2024, 200, 111766. [Google Scholar]
- Wu, W.; Chen, S.; Xiong, M.; Xing, L. Enhancing intersection safety in autonomous traffic: A grid-based approach with risk quantification. Accid. Anal. Prev. 2024, 200, 107559. [Google Scholar] [CrossRef] [PubMed]
- Hosseini, S.M.; Carli, R.; Parisio, A.; Dotoli, M. Robust decentralized charge control of electric vehicles under uncertainty on inelastic demand and energy pricing. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1834–1839. [Google Scholar]
- Roth, M.; Franke, G.; Rinderknecht, S. Decentralised multi-grid coupling for energy supply of a hybrid bus depot using mixed-integer linear programming. Smart Energy 2022, 8, 100090. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The average driving speed of EBs, /[km/h] | 25 | Starting time of bus operation hours, | 6:00 |
| The dispatch cost per unit distance for EBs, /[yuan/km] | 1 | Ending time of bus operation hours, | 22:30 |
| The upper bounds of SOC, | 0.2 | The length of unit time window, /[h] | 1 |
| The lower bounds of SOC, | 1 | Battery capacity, /[kW·h] | 200 |
| The penalty cost per unit time for buses arriving early (or late) at the takeover locations, (or )/[yuan/h] | 250/500 | Service radius of charging station, /[km] | 1.5 |
| Unit transfer/subsidy cost, /[yuan/passenger] | 0.5 | ||
| The energy consumption rate per unit distance, /[kW·h/km] | 1.2 | A large position, | 100,000 |
| The energy conversion rate of each charger, /[%] | 90 | The charging power of each charger, /[kW·h] | 70 |
| Peak hours | 6:00~12:00, 6:00~21:00 | ||
| Flat hours | 12:00~17:00 | ||
| Valley hours | 21:00~24:00, 0:00~6:00 | ||
| Unit electricity prices during peak hours, /[yuan/kW·h] | 1 | ||
| Unit electricity prices during flat hours, /[yuan/kW·h] | 0.6 | ||
| Unit electricity prices during valley hours, /[yaun/kW·h] | 0.3 | ||
| Bus Line | Total Scheduling Distance (km) | Punishment for Unpunctual Arrival (Yuan) | Electricity Cost in Peak Hours (Yuan) | Electricity Cost in Flat Hours (Yuan) | Electricity Cost in Valley Hours (Yuan) | Total Electricity Cost (Yuan) | Transfer/ Subsidy Cost (Yuan) | Total Cost (Yuan) |
|---|---|---|---|---|---|---|---|---|
| A | 8.16 | 0 | 0 | 0 | 279.64 | 279.64 | 35.5 | 323.3 |
| B | 4.653 | 0 | 0 | 0 | 266.31 | 266.31 | 40.12 | 311.07 |
| C | 11.263 | 0 | 0 | 37.8 | 229.60 | 267.40 | 41.53 | 320.21 |
| D | 12.736 | 0 | 0 | 0 | 323.96 | 323.96 | 35.86 | 372.57 |
| Total | 36.812 | 0 | 0 | 37.8 | 1099.53 | 1137.33 | 153.01 | 1327.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zeng, B.; Long, K.; Wu, W. Enhancing Electric Bus Charging Scheduling: An Energy-Integrated Dynamic Bus Replacement Strategy with Time-of-Use Pricing. Sustainability 2024, 16, 3334. https://doi.org/10.3390/su16083334
Liu Y, Zeng B, Long K, Wu W. Enhancing Electric Bus Charging Scheduling: An Energy-Integrated Dynamic Bus Replacement Strategy with Time-of-Use Pricing. Sustainability. 2024; 16(8):3334. https://doi.org/10.3390/su16083334
Chicago/Turabian StyleLiu, Yang, Bing Zeng, Kejun Long, and Wei Wu. 2024. "Enhancing Electric Bus Charging Scheduling: An Energy-Integrated Dynamic Bus Replacement Strategy with Time-of-Use Pricing" Sustainability 16, no. 8: 3334. https://doi.org/10.3390/su16083334