
A Sensor-Based Application for Eco-Driving Management in Short-Term Car Rentals

 ,
,  ,
, 
Abstract
1. Introduction
- Identification of driving parameters that will enable the determination of driving style;
- The analysis of the possibility of using IoT sensors for eco-driving management in short-term car rental companies.
2. Driving Style Management and Related Research
- Right and left turns (90 degrees);
- U-turns (180 degrees);
- Aggressive right and left turns (90 degrees);
- Aggressive U-turns (180 degrees);
- Aggressive acceleration and braking;
- Aggressive lane change (right and left);
- Device removal and excessive speed.
3. Materials and Methods
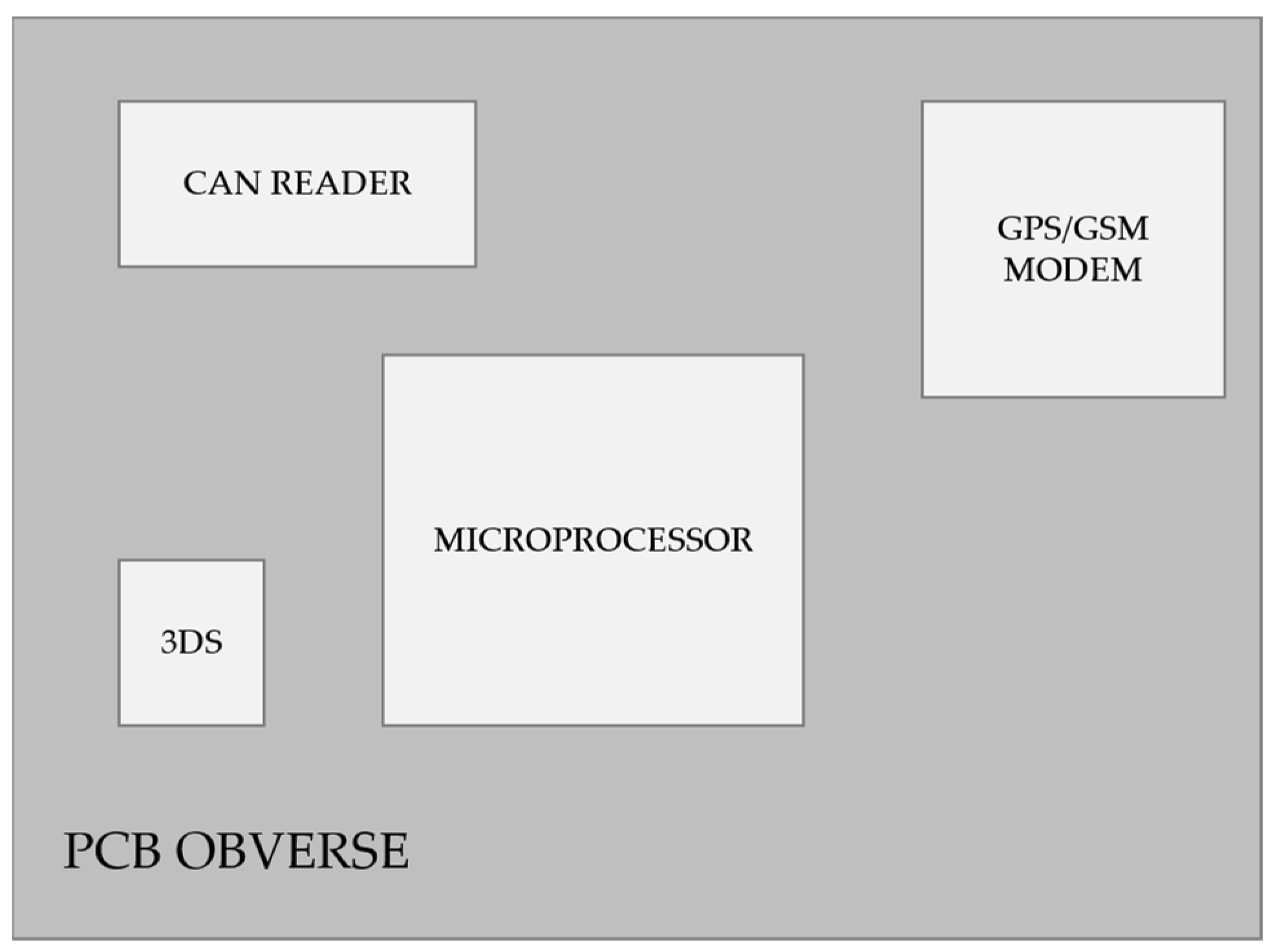
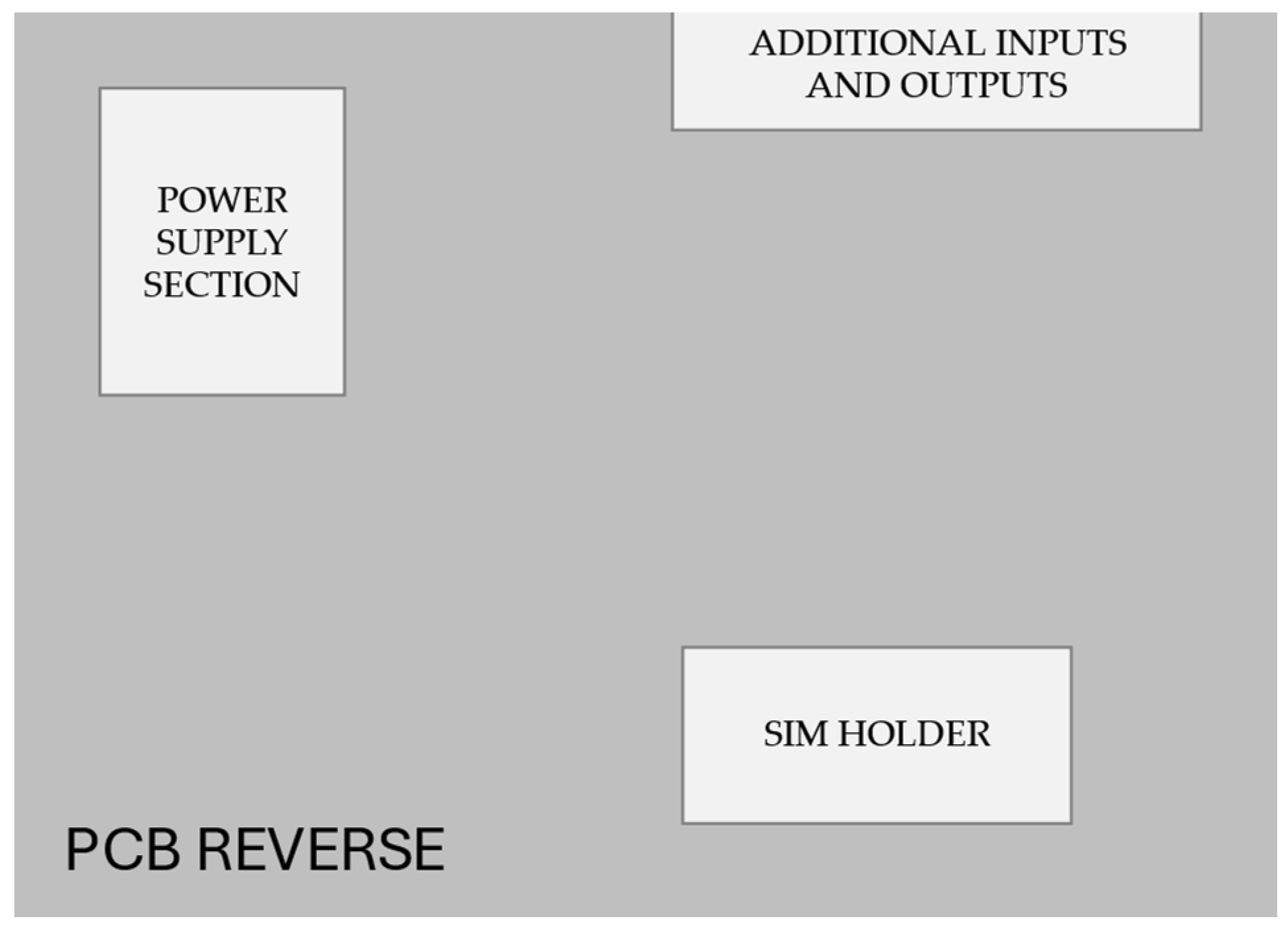
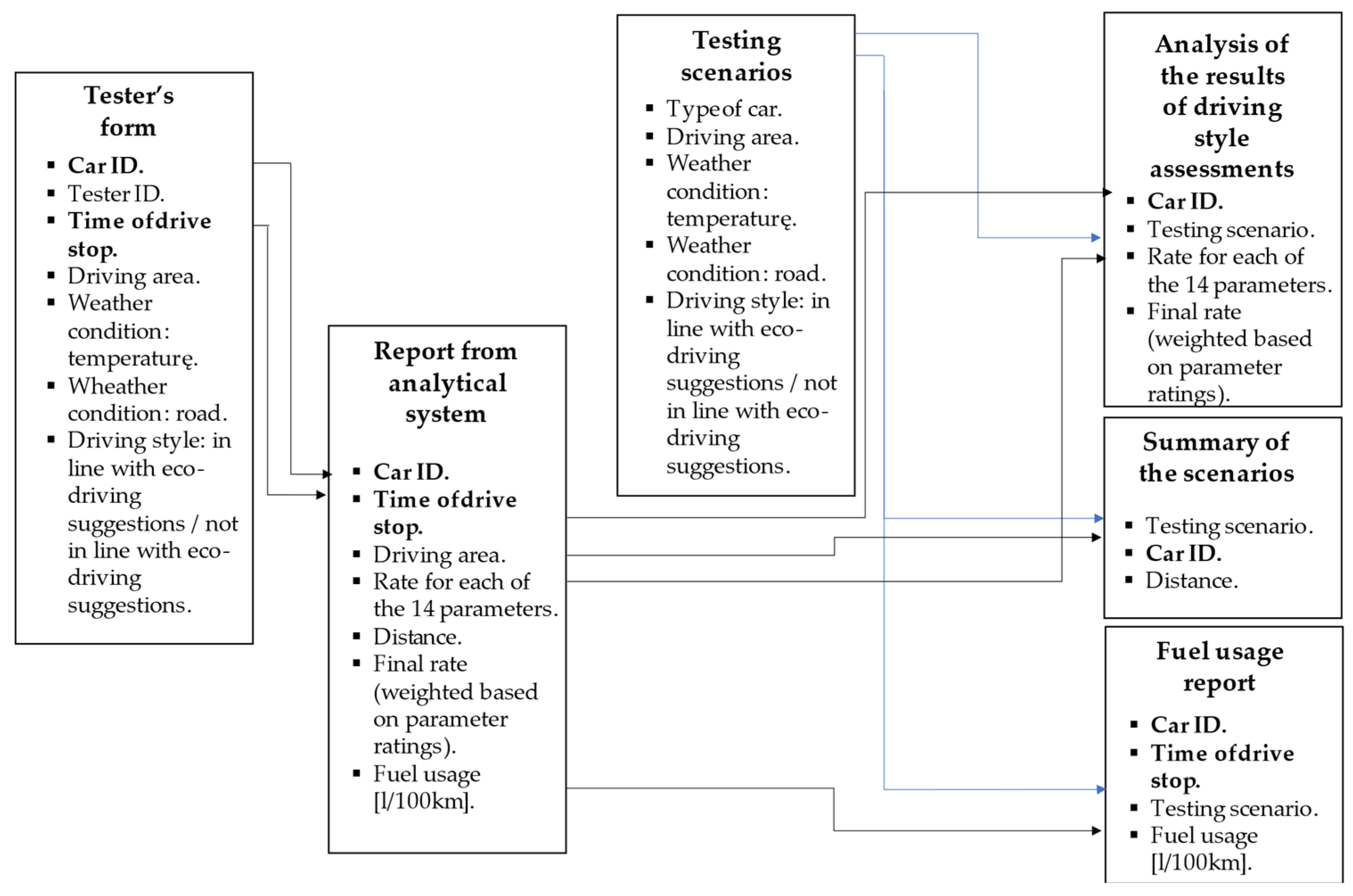
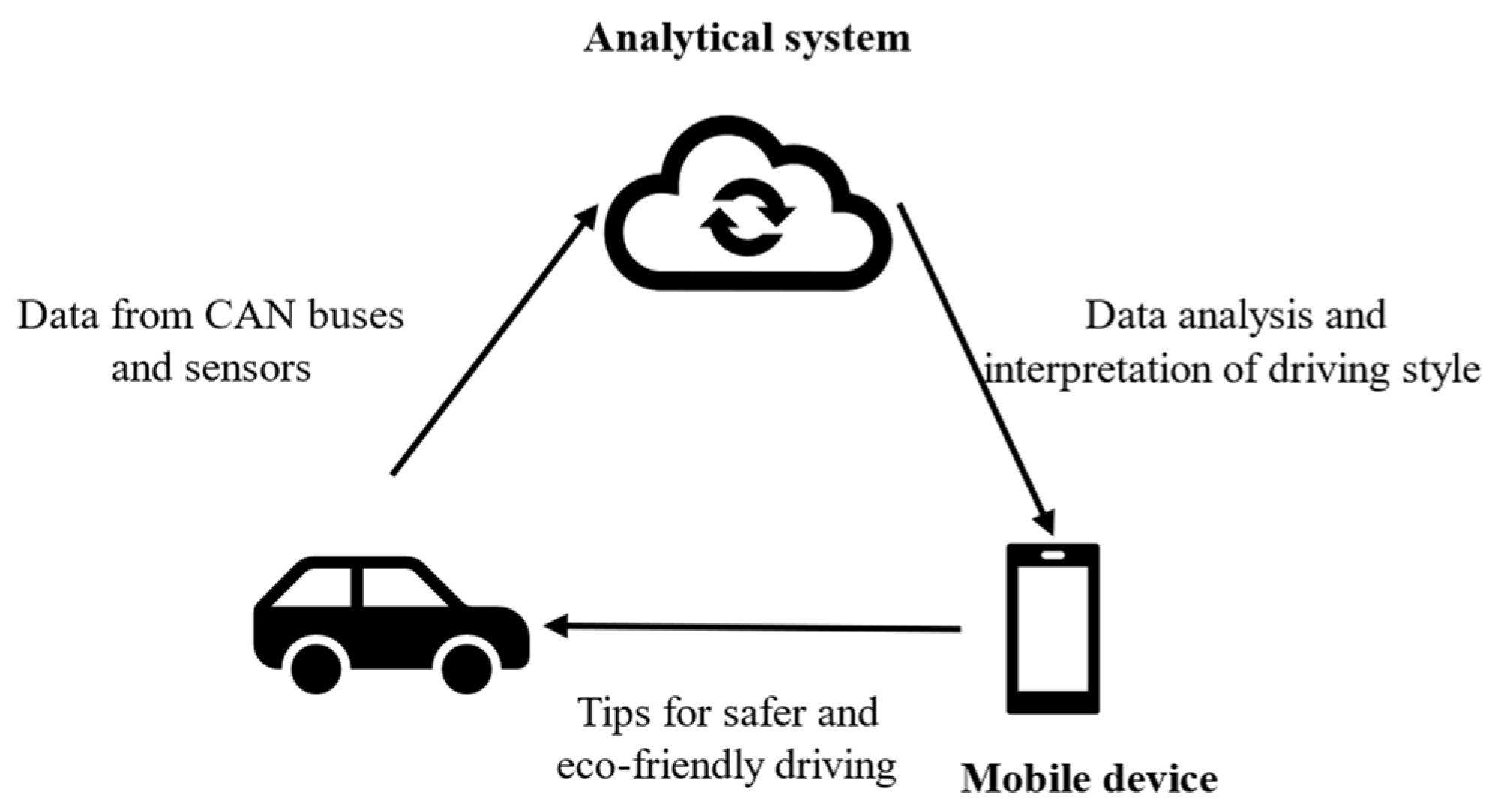
3.1. System Structure
- Overload and gyroscopic sensors only record changes in the parameters read, without giving any information about what is happening to the vehicle between the read changes;
- The basic data read from the CAN bus gives only a picture of how the driver operates the power unit.
- PCB;
- A processor that provides the computing power to read and analyze data frames with a frequency of 0.01 s;
- GSM/GPS modem;
- Additional inputs and outputs;
- CAN data readout module;
- Three-dimensional sensors;
- Power supply section.
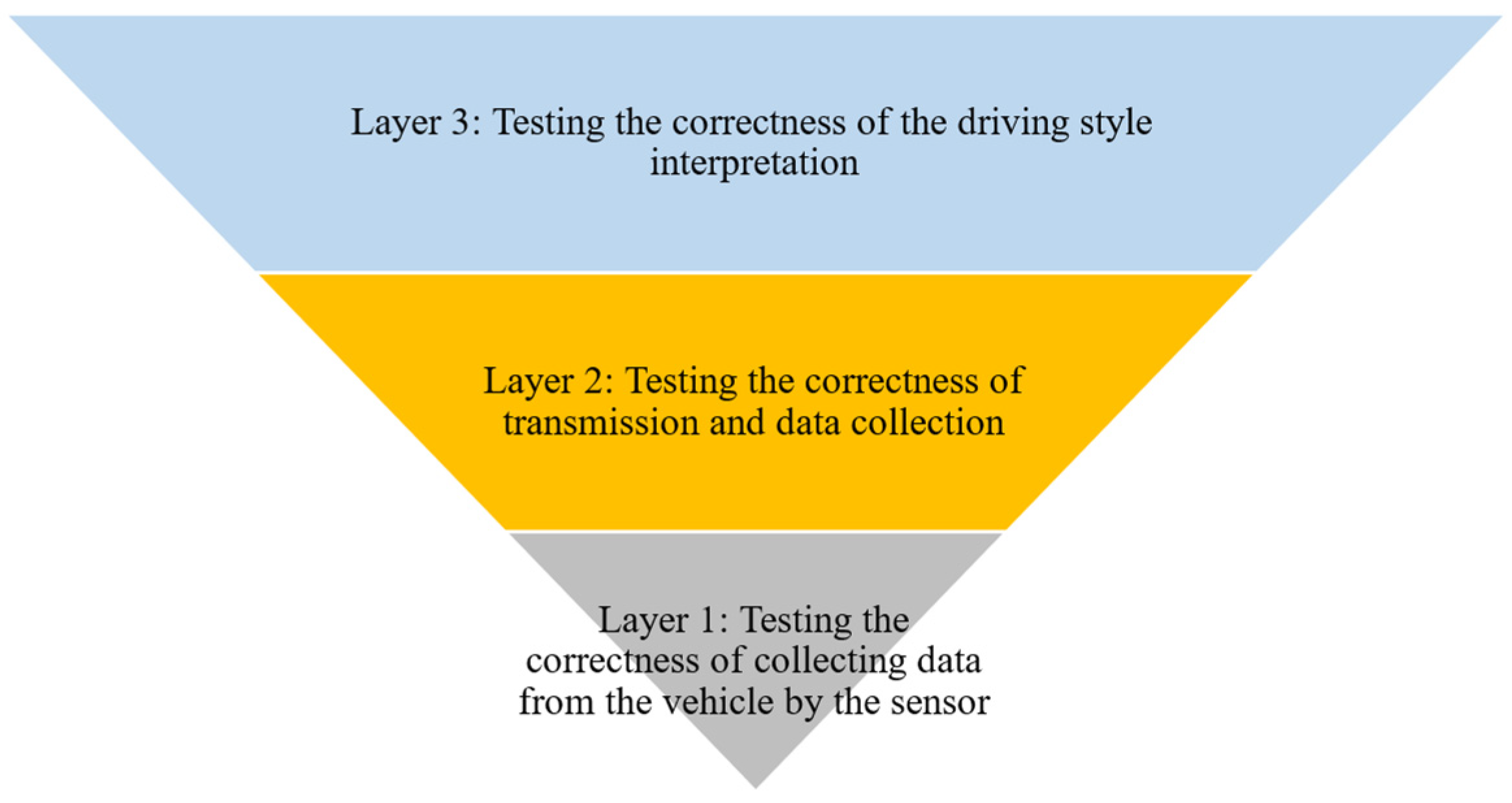
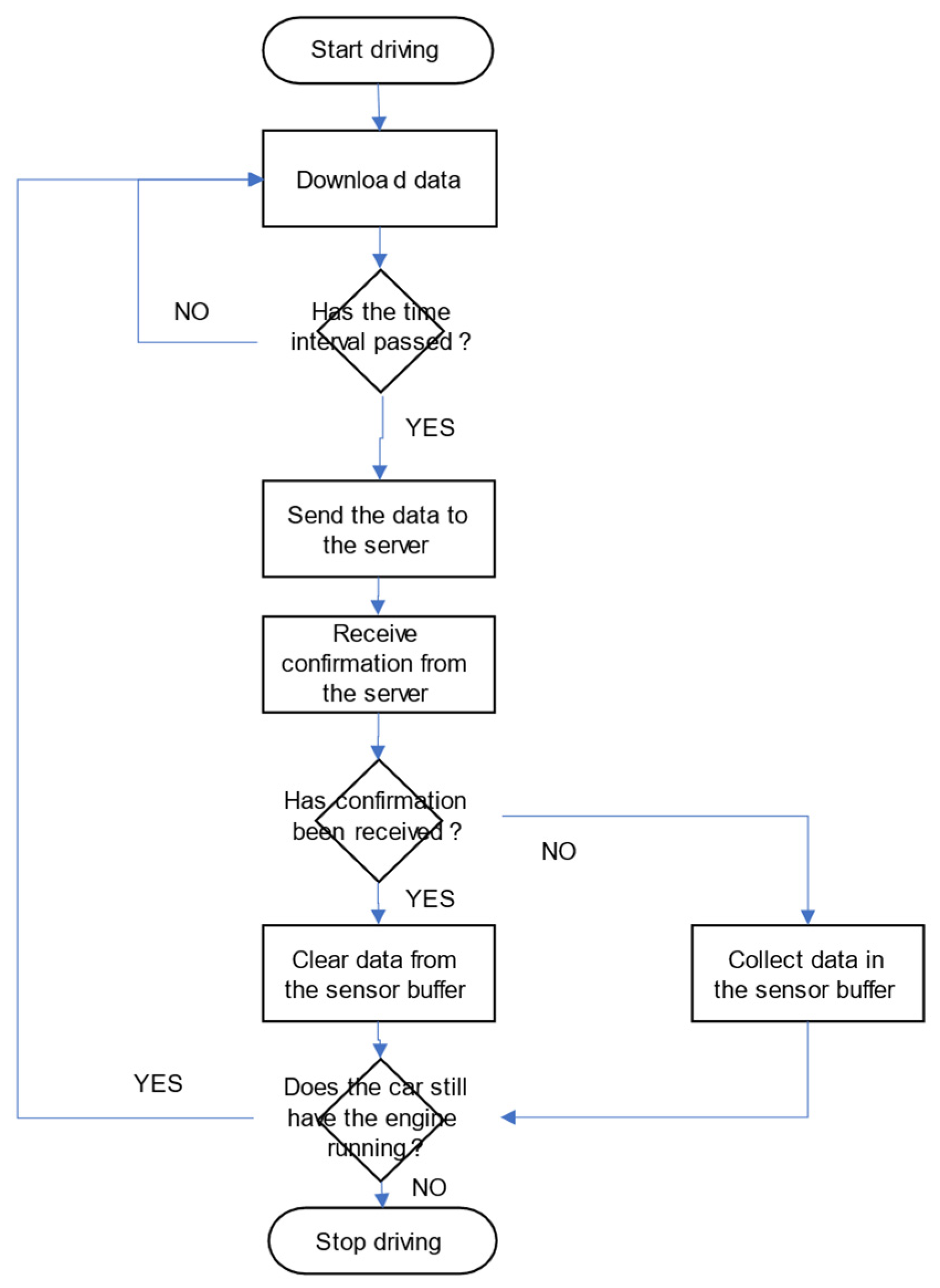
3.2. Validation Methodology
4. Results Analysis
- Testing the GPS transmitter—the route traveled by the vehicle is reflected on the map;
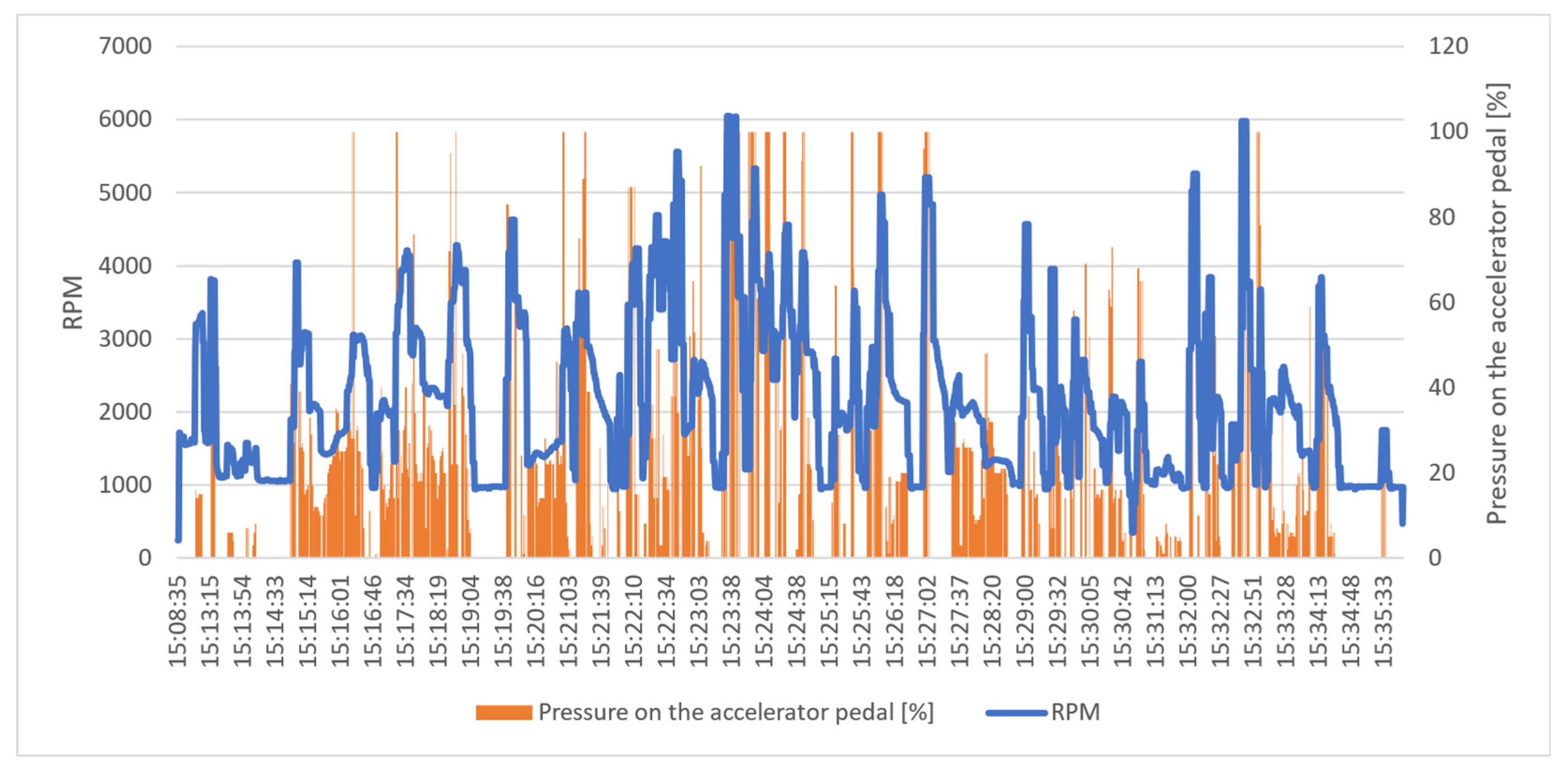
- Testing on a parked car—testing driving parameters such as stopping the car with the engine on (checking the correctness of recording the time when the car is parked with the engine on, testing the pressure on the accelerator pedal and recording RPMs);
- Testing while driving—based on video recordings of test drives. The course of the test drive was recorded, and the readings of the devices installed in the car were compared with the data sent by the sensor and collected by the analytical system in the database. The following data were compared: RPM, speed, rapid acceleration, rapid braking, sharp turn, kickdown, idling, cruise control and driving mode (city, outside the city, highway).
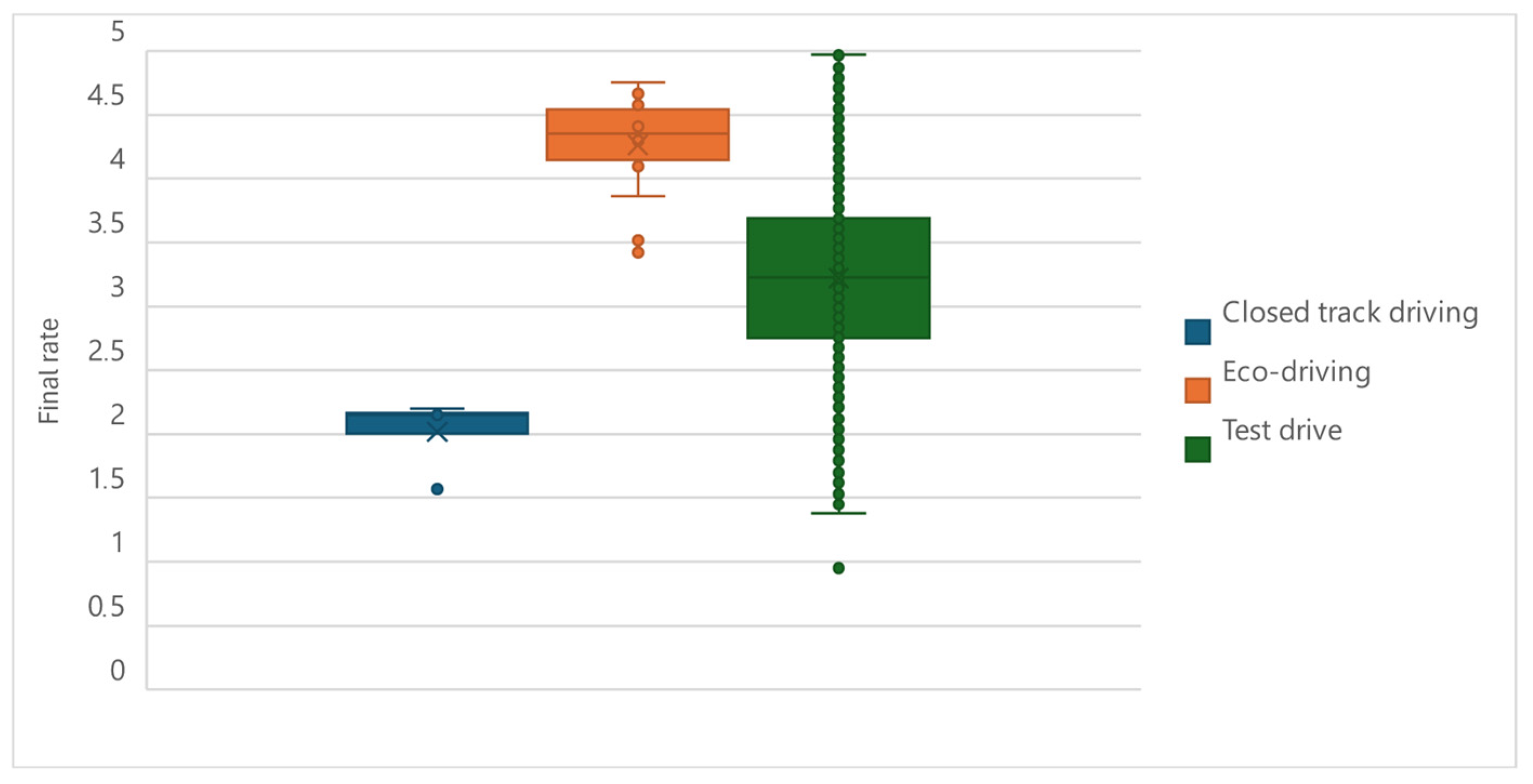
- Tests for 12 scenarios (combination of conditions: temperature, road surface and driving area) performed by an experienced eco-driving driver, which were performed with the BMW X1 (petrol engine, AT) and Skoda Scala (petrol engine, MT);
- Closed track tests in which dangerous behavior was checked, where the tests were carried out on a dry surface at temperatures above 10 degrees in a Skoda Scala (petrol engine, MT).
5. Discussion
6. Conclusions
7. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cichosz, S.M.; Pluta-Zaremba, A. How to improve freight transport emission’ management? LogForum 2019, 15, 93–105. [Google Scholar] [CrossRef]
- European Commission. A Roadmap for Moving to a Competitive Low Carbon Economy in 2050. In Communication from the commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions; European Commission: Brussels, Belgium, 2011; pp. 1–15. [Google Scholar]
- European Commission. A European Strategy for Low-Emission Mobility. In Communication from the Commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions; European Commission: Brussels, Belgium, 2016; pp. 1–13. [Google Scholar]
- Pająk, M.; Cyplik, P. Truck platooning in the context of sustainable development’s targets defined in European Union’s strategies. LogForum 2020, 16, 311–321. [Google Scholar] [CrossRef]
- Mosaberpanah, M.A.; Darban Khales, S. The Role of Transportation in Sustainable Development. In ICSDEC 2012: Developing the Frontier of Sustainable Design, Engineering, and Construction, Fort Worth, TX, USA, 7–9 November 2012; Chong, W.K.O., Gong, J., Chang, J., Siddiqui, M.K., Eds.; American Society of Civil Engineers: Reston, VA, USA, 2012; pp. 441–448. [Google Scholar] [CrossRef]
- Casals, L.C.; Martinez-Laserna, E.; García, B.A.; Nieto, N. Sustainability analysis of the electric vehicle use in Europe for CO2 emission reduction. J. Clean. Prod. 2016, 127, 425–437. [Google Scholar] [CrossRef]
- Huang, Y.; Ng, E.C.Y.; Zhou, J.L.; Surawski, N.C.; Chan, E.F.C.; Hong, G. Eco-driving technology for sustainable road transport: A review. Renew. Sustain. Energy Rev. 2018, 93, 596–609. [Google Scholar] [CrossRef]
- Nejadkoorki, F.; Yousefi, E.; Naserip, F. Analysing street traffic noise pollution in the city of Yazd, Iran. J. Environ. Health Sci. Eng. 2010, 7, 53–62. [Google Scholar]
- Jacyna, M.; Wasiak, M.; Lewczuk, K.; Karoń, G. Noise and environmental pollution from transport: Decisive problems in developing ecologically efficient transport systems. J. Vibroeng. 2017, 19, 5639–5655. [Google Scholar] [CrossRef]
- Koźlak, A.; Wach, D. Causes of traffic congestion in urban areas. Case of Poland. In Proceedings of the SHS Web of Conferences, the 10th Jubilee Scientific Conference—InfoGlob, Gdansk, Poland, 18–20 September 2018; Volume 57. [Google Scholar] [CrossRef]
- Zadobrischi, E.; Cosovanu, L.M.; Dimian, M. Traffic Flow Density Model and Dynamic Traffic Congestion Model Simulation Based on Practice Case with Vehicle Network and System Traffic Intelligent Communication. Symmetry 2020, 12, 1172. [Google Scholar] [CrossRef]
- Cartaxo, E.; Valois, I.; Miranda, V.; Costa, M. Issuances of Automotive Vehicles and the Impacts on Air Quality in the Largest City in the Brazilian Amazon. Sustainability 2018, 10, 4091. [Google Scholar] [CrossRef]
- Jakovljevic, B.; Paunovic, K.; Belojevic, G. Road-traffic noise and factors influencing noise annoyance in an urban population. Environ. Int. 2009, 35, 552–556. [Google Scholar] [CrossRef]
- Montes-González, D.; Vílchez-Gómez, R.; Barrigón-Morillas, J.M.; Atanasio-Moraga, P.; Rey-Gozalo, G.; Trujillo-Carmona, J. Noise and Air Pollution Related to Health in Urban Environments. In Proceedings of the Environment, Green Technology, and Engineering International Conference, Cáceres, Spain, 18–20 June 2018; Volume 20, p. 1311. [Google Scholar] [CrossRef]
- Murat, O.; Ebru, S.E. Determination of traffic noise pollution of the city of Tekirdag. J. Environ. Prot. Ecol. 2016, 17, 1276–1284. [Google Scholar]
- Almeida, F.; Silva, P.; Leite, J. Proposal of a carsharing system to improve urban mobility. Theor. Empir. Res. Urban Manag. 2017, 12, 32–44. [Google Scholar]
- Wang, Y.; Boggio-Marzet, A. Evaluation of Eco-Driving Training for Fuel Efficiency and Emission Reduction According to Road Type. Sustainability 2018, 10, 3891. [Google Scholar] [CrossRef]
- Adamczak, M.; Kovacic-Lukman, R.; Toboła, A.; Tórz, M.; Cyplik, P. Role of IoT Solutions in Reducing CO2 Emission and Road Safety in Car Rental and Car Sharing Market. In Integration of Information Flow for Greening Supply Chain Management; Koliński, A., Dujak, D., Golinska-Dawson, P., Eds.; Springer: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Fiedler, D.; Cap, M.; Certicky, M. Impact of Mobility-on-Demand on Traffic Congestion: Simulation-based Study. In Proceedings of the 20th IEEE International Conference on Intelligent Transportation Systems (ITSC 2017), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Musso, A.; Corazza, M.; Tozzi, M. Car Sharing in Rome: A Case Study to Support Sustainable Mobility. Procedia-Soc. Behav. Sci. 2012, 48, 3482–3491. [Google Scholar] [CrossRef]
- Baptista, P.; Meloa, S.; Rolima, C. Energy, environmental and mobility impacts of car-sharing systems. Empirical results from Lisbon, Portugal. Procedia-Soc. Behav. Sci. 2014, 111, 28–37. [Google Scholar] [CrossRef]
- Nijland, H.; van Meerkerk, J. Mobility and environmental impacts of car sharing in the Netherlands. Environ. Innov. Soc. Transit. 2017, 23, 84–91. [Google Scholar] [CrossRef]
- Santos, G. Sustainability and Shared Mobility Models. Sustainability 2018, 10, 3194. [Google Scholar] [CrossRef]
- Sun, L.; Zhang, T.; Liu, S.; Wang, K.; Rogers, T.; Yao, L.; Zhao, P. Reducing energy consumption and pollution in the urban transportation sector: A review of policies and regulations in Beijing. J. Clean. Prod. 2021, 285, 125339. [Google Scholar] [CrossRef]
- Fafoutellis, P.; Mantouka, E.G.; Vlahogianni, E.I. Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Sustainability 2021, 13, 226. [Google Scholar] [CrossRef]
- Sivak, M.; Schoettle, B. Eco-driving: Strategic, tactical, and operational decisions of the driver that influence vehicle fuel economy. Transp. Policy 2012, 22, 96–99. [Google Scholar] [CrossRef]
- Kubera, M.; Kot, S. Evolution of Carsharing in Poland. In Proceedings of the 31st International Business Information Management Association (IBIMA), Milan, Italy, 25–26 April 2018; pp. 5328–5336, ISBN 978-0-9998551-0-2. [Google Scholar]
- Lajunen, T.; Summala, H. Can we trust self-reports of driving? Effects of impression management on driver behaviour questionnaire responses. Transp. Res. Part F 2003, 6, 97–107. [Google Scholar] [CrossRef]
- Andria, G.; Attivissimo, F.; Di Nisio, A.; Lanzolla, A.M.L.; Pellegrino, A. Development of an automotive data acquisition platform for analysis of driving behavior. Measurement 2016, 93, 278–287. [Google Scholar] [CrossRef]
- Puchalski, A.; Komorska, I. Driving style analysis and driver classification using OBD data of a hybrid electric vehicle. Transp. Probl. 2020, 15, 83–94. [Google Scholar] [CrossRef]
- Nousias, S.; Tselios, C.; Bitzas, D.; Amaxilatis, D.; Montesa, J.; Lalos, A.S.; Moustakas, K.; Chatzigiannakis, I. Exploiting Gamification to Improve Eco-driving Behaviour: The GamECAR Approach. Electron. Notes Theor. Comput. Sci. 2019, 343, 103–116. [Google Scholar] [CrossRef]
- Jachimczyk, B.; Dziak, D.; Czapla, J.; Damps, P.; Kulesza, W.J. IoT On-Board System for Driving Style Assessment. Sensors 2018, 18, 1233. [Google Scholar] [CrossRef] [PubMed]
- Johnsona, D.A.; Trivedi, M.M. Driving Style Recognition Using a Smartphone as a Sensor Platform. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), St. Louis, MO, USA, 5–7 October 2011; pp. 1609–1615. [Google Scholar] [CrossRef]
- Cordero, J.; Aguilar, J.; Aguilar, K.; Chávez, D.; Puerto, E. Recognition of the Driving Style in Vehicle Drivers. Sensors 2020, 20, 2597. [Google Scholar] [CrossRef]
- Meiring, G.A.M.; Myburgh, H.C. A Review of Intelligent Driving Style Analysis Systems and Related Artificial Intelligence Algorithms. Sensors 2015, 15, 30653–30682. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors and Publication | Parameters |
|---|---|
| Andria, G.; Attivissimo, F.; Di Nisio, A.; Lanzolla, A.M.L.; Pellegrino [29] | acceleration, engine speed and car speed |
| Puchalski, A.; Komorska, I. [30] | car speed, acceleration, instantaneous gasoline consumption, battery charge level and engine speed |
| Nousias, S.; Tselios, C.; Bitzas, D.; Amaxilatis, D.; Montesa, J.; Lalos, A.S.; Moustakas K.; Chatzigiannakis, I. [31] | fuel consumption, changing the gear, acceleration, braking, aggressiveness score denoting frequency and number of braking and accelerations per minute |
| Jachimczyk, B.; Dziak, D.; Czapla, J.; Damps, P.; Kulesza, W.J. [32] | deceleration and acceleration ratio (driver’s tendency for aggressive driving), bumping ratio (the tendency of a driver to avoid speed bumps at too high a speed), cornering ratio (the way driver takes corners—fast and aggressive or calm and slow), driving time without rest ratio (taking a break or not taking a it after a specified period of driving), car speeding ratio (average speed exceeding the speed limit), car speeding duration ratio (how long the driver is driving at excessive speed), excessive engine rotational speed ratio (not using the correct gear) and excessive engine rotational speed duration ratio (time using the wrong gear) |
| No. | Parameter |
|---|---|
| 1 | Stop with the engine running |
| 2 | RPM |
| 3 | Speed |
| 4 | Pressure on the accelerator pedal |
| 5 | Engine braking |
| 6 | Gentle drive |
| 7 | Rapid acceleration |
| 8 | Rapid braking |
| 9 | Sharp turn |
| 10 | Correct gear |
| 11 | Overspeed |
| 12 | Kickdown |
| 13 | Idling |
| 14 | Cruise control |
| 15 | Driving mode (urban, extra-urban, highway) |
| No. | Parameter | Can Bus | Dedicated Sensor | Dedicated Algorithm in the Firmware | External Data |
|---|---|---|---|---|---|
| 1 | Stop with the engine running | YES | NO | YES | NO |
| 2 | RPM | YES | NO | NO | NO |
| 3 | Speed | YES | NO | NO | NO |
| 4 | Pressure on the accelerator pedal | YES | NO | NO | NO |
| 5 | Engine braking | NO | NO | YES | NO |
| 6 | Gentle drive | NO | NO | YES | NO |
| 7 | Rapid acceleration | NO | YES | NO | NO |
| 8 | Rapid braking | NO | YES | NO | NO |
| 9 | Sharp turn | NO | YES | NO | NO |
| 10 | Correct gear | NO | NO | YES | NO |
| 11 | Overspeed | NO | NO | NO | YES |
| 12 | Kickdown | NO | NO | YES | NO |
| 13 | Idling | NO | NO | YES | NO |
| 14 | Cruise control | YES | NO | YES | NO |
| 15 | Driving mode (urban, extra-urban, highway) | NO | NO | YES | YES |
| Feature | Car | Driving Style | Driving Area | Weather Conditions |
|---|---|---|---|---|
| State of the feature | segment C PB, MT (Skoda Scala) | in line with eco-driving suggestions | city | dry road and temperature < 10 degrees |
| segment C PB, MT (Nissan Qashqai) | contrary to the suggestions of ecological driving | outside the city | wet road and temperature < 10 degrees | |
| segment C PB, AT (BMW X1) | highway | dry road and temperature > 10 degrees | ||
| segment D ON, MT (Volkswagen Passat) | wet road and temperature > 10 degrees | |||
| segment D ON, AT (BMW 318DGT) |
| Car | Total Kilometers [km] | % of the 2000 km Scenario Requirements | % of Test Scenarios Completed |
|---|---|---|---|
| Skoda Scala | 2365 | 118.3% | 93.5% |
| Nissan Qashqai | 2500 | 125.0% | 99.5% |
| Volkswagen Passat | 2432 | 121.6% | 98.5% |
| BMW 318DGT | 2220 | 111.0% | 89.7% |
| BMW X1 | 2278 | 113.9% | 97.1% |
| Driving Style | In Line with Eco-Driving Suggestions | Contrary to the Suggestions of Ecological Driving |
|---|---|---|
| Stop with the engine running | 4.71 | 4.23 |
| Engine braking | 2.55 | 3.31 |
| Idling | 4.75 | 4.73 |
| RPM | 4.53 | 3.45 |
| Speed | 4.73 | 4.61 |
| ACC | 3.96 | 3.62 |
| Cruise control | 3.53 | 2.48 |
| Gentle drive | 2.41 | 1.85 |
| Sharp turn | 3.82 | 3.82 |
| Rapid braking | 4.05 | 3.96 |
| Rapid acceleration | 4.18 | 4.08 |
| Kickdown | 3.98 | 1.64 |
| Correct gear | 3.77 | 3.30 |
| Exceeding the speed limit | 1.58 | 1.26 |
| Final note | 3.60 | 3.08 |
| Fuel usage [l/100 km] | 6.56 | 7.79 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adamczak, M.; Toboła-Walaszczyk, A.; Cyplik, P.; Nowak, Ł.; Tórz, M. A Sensor-Based Application for Eco-Driving Management in Short-Term Car Rentals. Sustainability 2024, 16, 3805. https://doi.org/10.3390/su16093805
Adamczak M, Toboła-Walaszczyk A, Cyplik P, Nowak Ł, Tórz M. A Sensor-Based Application for Eco-Driving Management in Short-Term Car Rentals. Sustainability. 2024; 16(9):3805. https://doi.org/10.3390/su16093805
Chicago/Turabian StyleAdamczak, Michał, Adrianna Toboła-Walaszczyk, Piotr Cyplik, Łukasz Nowak, and Maciej Tórz. 2024. "A Sensor-Based Application for Eco-Driving Management in Short-Term Car Rentals" Sustainability 16, no. 9: 3805. https://doi.org/10.3390/su16093805
APA StyleAdamczak, M., Toboła-Walaszczyk, A., Cyplik, P., Nowak, Ł., & Tórz, M. (2024). A Sensor-Based Application for Eco-Driving Management in Short-Term Car Rentals. Sustainability, 16(9), 3805. https://doi.org/10.3390/su16093805