
Optimizing Modular Vehicle Public Transportation Services with Short-Turning Strategy and Decoupling/Coupling Operations


Abstract
:1. Introduction
- (1)
- Aiming at the problem of saturated passenger flow at local interval stops and unbalanced passenger flow in the up and down directions of a bidirectional bus route during peak hours, this paper jointly optimizes the departure interval of each trip and the capacity of MV, the turnaround scheme of short-turning vehicles, and the decoupling/coupling scheme of MVs at turnaround stops to improve the matching degree between the bus system’s capacity and passenger demand.
- (2)
- We propose an integer nonlinear programming (INLP) model to simulate the service of MVs with short-turning strategies in public transportation systems, with the objective of minimizing the total sum of passenger waiting time costs and vehicle operating costs. To directly solve the model using the commercial solver Gurobi version 12.0.0, some nonlinear and non-quadratic terms in the model are equivalently replaced.
- (3)
- The proposed model is tested through numerical studies. The model is compared with two benchmark operation strategies to demonstrate the advantage of MV technology combined with short-turning strategies in reducing the total system cost.
2. Literature Review
2.1. Short-Turning Strategies
2.2. Modular Vehicles
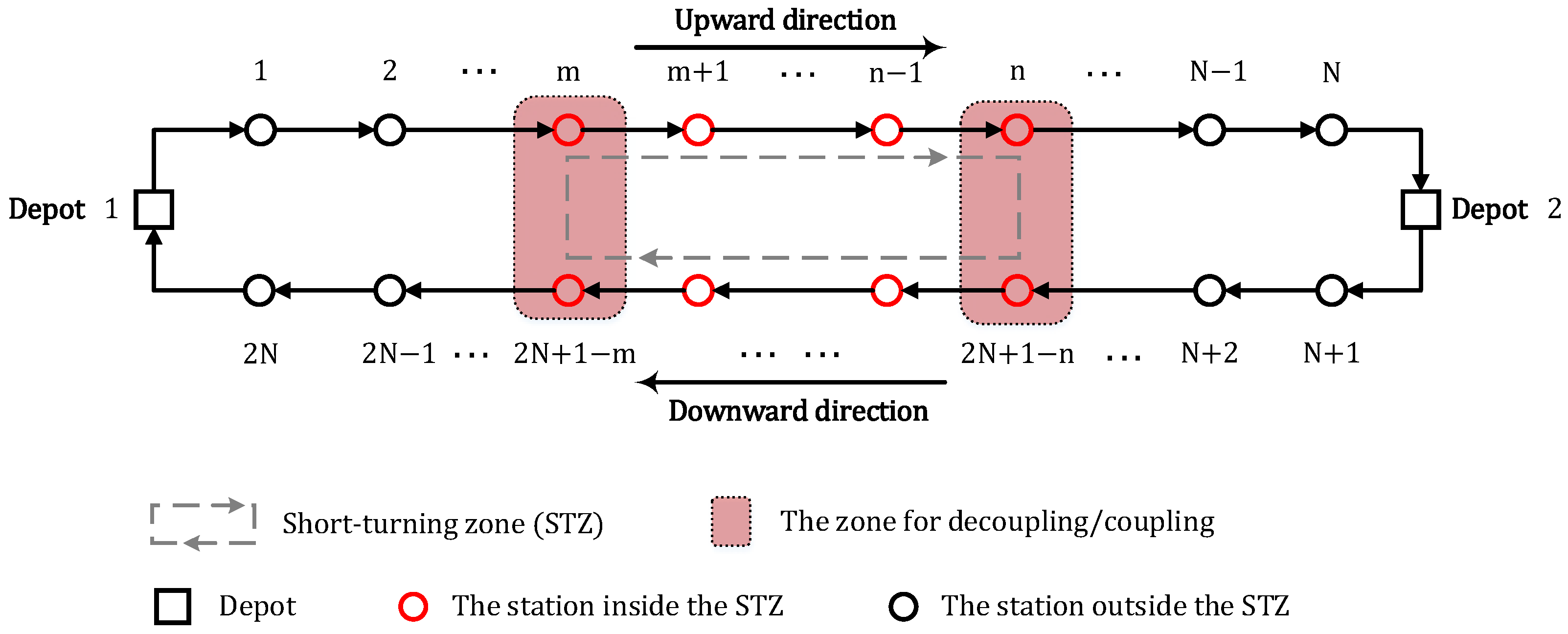
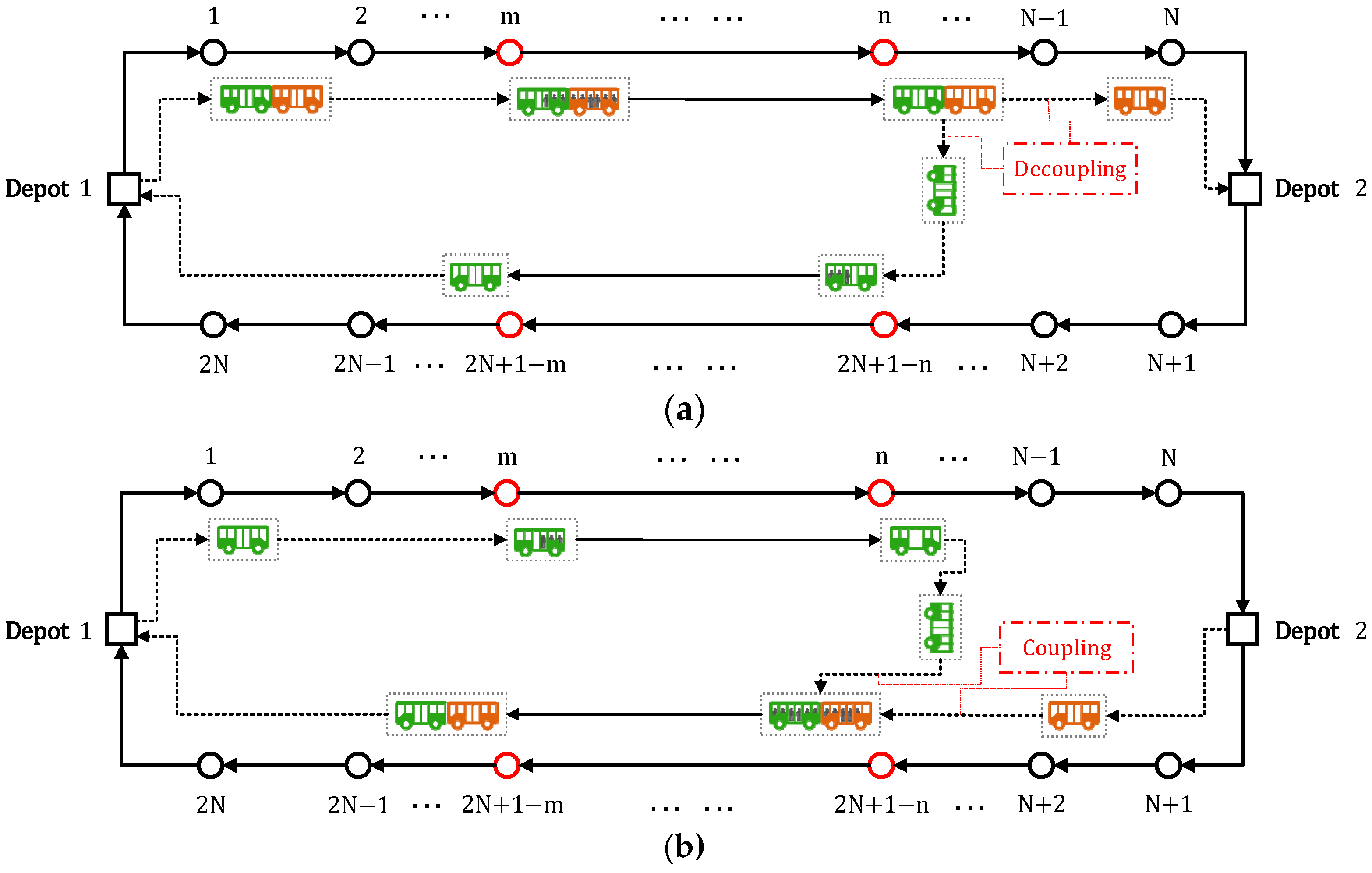
3. Problem Description
4. Model Formulation and Solution
4.1. Notation
4.2. Constraints
4.2.1. Vehicle Operation Constraints
4.2.2. Turnaround Constraints
4.2.3. Decoupling/Coupling Operation Constraints
4.2.4. Passenger Flow Dynamic Evolution Constraints
4.3. Objective Functions
4.3.1. Passenger Waiting Time Cost
4.3.2. Vehicle Operating Cost
4.4. Model Solving
5. Numerical Studies
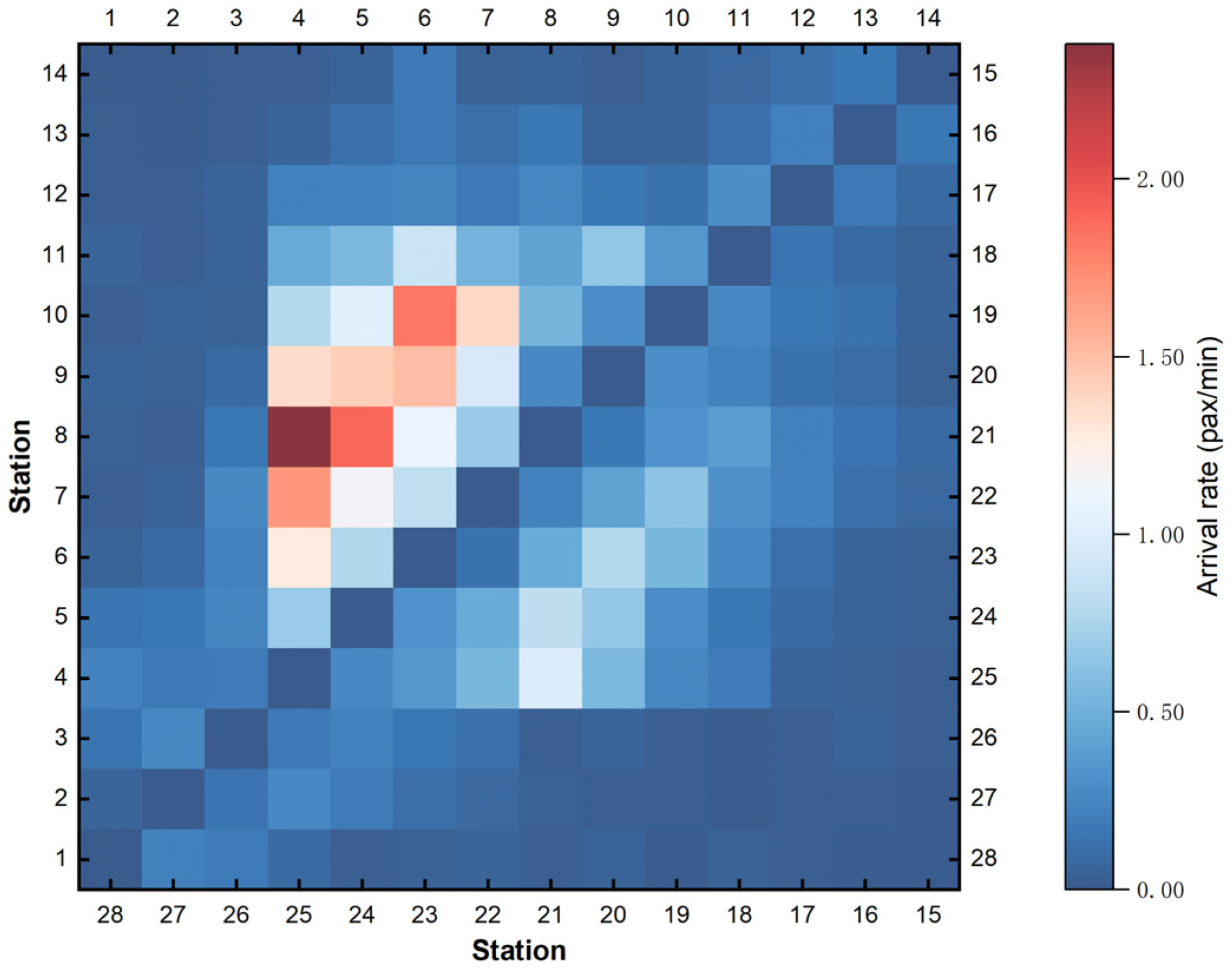
5.1. Basic Data
5.2. Optimization Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bi, H.; Zhang, S.; Lu, F. Analysis of Decoupling Effects and Influence Factors in Transportation: Evidence from Guangdong Province, China. ISPRS Int. J. Geo-Inf. 2024, 13, 404. [Google Scholar] [CrossRef]
- Abuaisha, A.; Abu-Eisheh, S. Optimization of Urban Public Transportation Considering the Modal Fleet Size: A Case Study from Palestine. Sustainability 2023, 15, 6924. [Google Scholar] [CrossRef]
- Luan, X.; Eikenbroek, O.A.L.; Corman, F.; van Berkum, E.C. Passenger social rerouting strategies in capacitated public transport systems. Transp. Res. E Logist. Transp. Rev. 2024, 188, 103598. [Google Scholar] [CrossRef]
- Li, X.; An, X.; Zhang, B. Minimizing passenger waiting time in the multi-route bus fleet allocation problem through distributionally robust optimization and reinforcement learning. Comput. Oper. Res. 2024, 164, 106568. [Google Scholar] [CrossRef]
- Wu, M.; Yu, C.; Ma, W.; An, K.; Zhong, Z. Joint optimization of timetabling, vehicle scheduling, and ride-matching in a flexible multi-type shuttle bus system. Transp. Res. Part C Emerg. Technol. 2022, 139, 103657. [Google Scholar] [CrossRef]
- Xue, H.; Jia, L.; Li, J.; Guo, J. Jointly optimized demand-oriented train timetable and passenger flow control strategy for a congested subway line under a short-turning operation pattern. Physica A 2022, 593, 126957. [Google Scholar] [CrossRef]
- Khan, Z.S.; He, W.; Menéndez, M. Application of modular vehicle technology to mitigate bus bunching. Transp. Res. Part C Emerg. Technol. 2023, 146, 103953. [Google Scholar] [CrossRef]
- Tang, L.; Ariano, A.D.; Xu, X.; Li, Y.; Ding, X.; Samà, M. Scheduling local and express trains in suburban rail transit lines: Mixed–integer nonlinear programming and adaptive genetic algorithm. Comput. Oper. Res. 2021, 135, 105436. [Google Scholar] [CrossRef]
- Yuan, J.; Gao, Y.; Li, S.; Liu, P.; Yang, L. Integrated optimization of train timetable, rolling stock assignment and short-turning strategy for a metro line. Eur. J. Oper. Res. 2022, 301, 855–874. [Google Scholar] [CrossRef]
- Gong, C.; Luan, X.; Yang, L.; Qi, J.; Corman, F. Integrated optimization of train timetabling and rolling stock circulation problem with flexible short-turning and energy-saving strategies. Transp. Res. Part C Emerg. Technol. 2024, 166, 104756. [Google Scholar] [CrossRef]
- Wang, F.; Wang, P.; Zhu, Z.; Xu, R.; Pan, H.; Bešinovi, N. Robust optimization of train timetables with short-length and full-length services considering uncertain passenger volume and service choice behavior. Transp. Res. Part C Emerg. Technol. 2024, 169, 104855. [Google Scholar] [CrossRef]
- Shi, X.; Li, X. Operations design of modular vehicles on an oversaturated corridor with first-in, first-out passenger queueing. Transp. Sci. 2021, 55, 1187–1205. [Google Scholar] [CrossRef]
- Chen, Z.; Li, X.; Qu, X. A continuous model for designing corridor systems with modular autonomous vehicles enabling station-wise docking. Transp. Sci. 2022, 56, 1–30. [Google Scholar] [CrossRef]
- Tian, Q.; Lin, Y.H.; Wang, D.Z.W.; Yang, K. Toward real-time operations of modular-vehicle transit services: From rolling horizon control to learning-based approach. Transp. Res. Part C Emerg. Technol. 2025, 170, 104938. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, S.; Liu, H.; Liang, S. Design of integrated limited-stop and short-turn services for a bus route. Math. Probl. Eng. 2016, 2016, 7901634. [Google Scholar] [CrossRef]
- Wang, W.; Tian, Z.; Li, K.; Yu, B. Real-time short turning strategy based on passenger choice behavior. J. Intell. Transp. Syst. 2019, 23, 569–582. [Google Scholar] [CrossRef]
- Gkiotsalitis, K.; Wu, Z.; Cats, O. A cost-minimization model for bus fleet allocation featuring the tactical generation of short-turning and interlining options. Transp. Res. Part C Emerg. Technol. 2019, 98, 14–36. [Google Scholar] [CrossRef]
- Bie, Y.; Hao, M.; Guo, M. Optimal Electric Bus Scheduling Based on the Combination of All-Stop and Short-Turning Strategies. Sustainability 2021, 13, 1827. [Google Scholar] [CrossRef]
- Zhang, W.; Zhao, H.; Xu, M. Optimal operating strategy of short turning lines for the battery electric bus system. Commun. Transport. Res. 2021, 1, 100023. [Google Scholar] [CrossRef]
- Zhang, W.; Zhao, H. Optimal design of electric bus short turning and interlining strategy. Transport. Res. Part D-Transport Environ. 2024, 134, 104334. [Google Scholar] [CrossRef]
- Yanık, S.; Yilmaz, S.B. Optimal design of a bus route with short-turn services. Public Transport 2022, 15, 169–197. [Google Scholar] [CrossRef]
- Chen, Z.; Li, X.; Zhou, X. Operational design for shuttle systems with modular vehicles under oversaturated traffic: Discrete modeling method. Transp. Res. Part B Methodol. 2019, 122, 1–19. [Google Scholar] [CrossRef]
- Chen, Z.; Li, X.; Zhou, X. Operational design for shuttle systems with modular vehicles under oversaturated traffic: Continuous modeling method. Transp. Res. Part B Methodol. 2020, 132, 76–100. [Google Scholar] [CrossRef]
- Dai, Z.; Liu, X.C.; Chen, X.; Ma, X. Joint optimization of scheduling and capacity for mixed traffic with autonomous and human-driven buses: A dynamic programming approach. Transp. Res. Part C Emerg. Technol. 2020, 114, 598–619. [Google Scholar] [CrossRef]
- Zhang, J.; Ge, Y.; Tang, C.; Zhong, M. Optimising modular-autonomous-vehicle transit service employing coupling-decoupling operations plus skip-stop strategy. Transp. Res. Part E Logist. Transp. Rev. 2024, 184, 103450. [Google Scholar] [CrossRef]
- Dakic, I.; Yang, K.; Menendez, M.; Chow, J.Y.J. On the design of an optimal flexible bus dispatching system with modular bus units: Using the three-dimensional macroscopic fundamental diagram. Transp. Res. Part B Methodol. 2021, 148, 38–59. [Google Scholar] [CrossRef]
- Liu, Z.; Correia, G.H.D.A.; Ma, Z.; Li, S.; Ma, X. Integrated optimization of timetable, bus formation, and vehicle scheduling in autonomous modular public transport systems. Transp. Res. Part C Emerg. Technol. 2023, 155, 104306. [Google Scholar] [CrossRef]
- Tian, Q.; Lin, Y.H.; Wang, D.Z.W. Joint scheduling and formation design for modular-vehicle transit service with time-dependent demand. Transp. Res. Part C Emerg. Technol. 2023, 147, 103986. [Google Scholar] [CrossRef]
- Xia, D.; Ma, J.; Azadeh, S.S.; Zhang, W. Data-driven distributionally robust timetabling and dynamic-capacity allocation for automated bus systems with modular vehicles. Transp. Res. Part C Emerg. Technol. 2023, 155, 104314. [Google Scholar] [CrossRef]
- Sadrani, M.; Tirachini, A.; Antoniou, C. Optimization of service frequency and vehicle size for automated bus systems with crowding externalities and travel time stochasticity. Transp. Res. Part C Emerg. Technol. 2022, 143, 103793. [Google Scholar] [CrossRef]
- Tian, Q.; Lin, Y.H.; Wang, D.Z.W.; Liu, Y. Planning for modular-vehicle transit service system: Model formulation and solution methods. Transp. Res. Part C Emerg. Technol. 2022, 138, 103627. [Google Scholar] [CrossRef]
- Chen, Z.; Li, X. Designing corridor systems with modular autonomous vehicles enabling station-wise docking: Discrete modeling method. Transp. Res. Part E Logist. Transp. Rev. 2021, 152, 102388. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Sets | |
| Sets of stations in the up and down direction, | |
| Set of all stations, | |
| Sets of trips in the up and down direction, | |
| Set of all trips, | |
| Parameters | |
| Capacity of individual MU | |
| Maximum number of MUs in a MV | |
| Passenger arrival rate from station to stop | |
| Operational cost of a MV to complete one trip | |
| Fixed operating cost for a MV | |
| Marginal operating cost for a MV | |
| Maximum and minimum headway | |
| Dwell time of MV on trip at station | |
| Running time of MV from station to station | |
| Passenger waiting time cost per unit time | |
| a large value | |
| Maximum and minimum turnaround time | |
| Stopping station for short-turning trips, full-length trips. 1 if stopping, 0 otherwise | |
| MV decoupling and coupling stations. 1 if yes, otherwise 0 | |
| Weights in the objective function | |
| Decision variables | |
| Number of MUs for MV turnaround on trip to trip in the opposite direction | |
| Number of MUs provided by the depot for coupling to trip | |
| Binary variable that equals 1 if the MV on trip turnaround to trip , and 0 otherwise | |
| Binary variable that equals 1 if trip is a short-turning trip, and otherwise | |
| Headway of trip at the initial station | |
| Dependent variables | |
| Number of MUs of the MV on trip at station | |
| Number of MUs decoupled from the MV on trip at the designated station | |
| Number of MUs provided to trip by the turnaround after decoupling from MV of the opposite direction trip | |
| Binary variable that equals 1 if the MV on a trip in the opposite direction turnaround to trip , and 0 otherwise | |
| Binary variable that equals 1 if the MV on trip turnaround to the opposite direction, and otherwise | |
| Binary variable that equals 1 if trip stops at station | |
| Number of passengers arriving at station and destined for station between trip and trip | |
| Number of passengers arriving at station with destination station in the interval between trip and trip | |
| Number of passengers actually waiting at station for the MV of trip with destination station | |
| Binary variable that equals 1 If trip stops at both station and , and 0 otherwise | |
| Number of passengers boarding MV of trip at station with destination station | |
| Number of passengers failing to board the MV on trip at station with destination station | |
| Number of passengers arriving at station between trip and trip | |
| Number of passengers waiting for the MV on trip at station | |
| Number of passengers actually waiting at station for the MV of trip | |
| Number of passengers boarding the MV on trip at station | |
| Number of passengers alighting from the MV on trip at station | |
| Number of passengers on board the MV on trip before arriving at station | |
| Number of passengers failing to board the MV on trip at station | |
| Proportion of passengers boarding trip from station to station | |
| Arrival time of the MV on trip at station | |
| Departure time of the MV on trip from station | |
| Binary variables used for linearization |
| Stations | Running Time (min) | Stations | Running Time (min) | Stations | Running Time (min) | Stations | Running Time (min) |
|---|---|---|---|---|---|---|---|
| 1–2 | 2 | 8–9 | 3 | 15–16 | 2 | 22–23 | 2 |
| 2–3 | 2 | 9–10 | 2 | 16–17 | 2 | 23–24 | 2 |
| 3–4 | 2 | 10–11 | 2 | 17–18 | 3 | 24–25 | 3 |
| 4–5 | 3 | 11–12 | 3 | 18–19 | 2 | 25–26 | 2 |
| 5–6 | 2 | 12–13 | 2 | 19–20 | 2 | 26–27 | 2 |
| 6–7 | 2 | 13–14 | 2 | 20–21 | 3 | 27–28 | 2 |
| 7–8 | 2 | 21–22 | 2 |
| Trips | Numbers | Trips | Numbers |
|---|---|---|---|
| 3→34 | 2 | 25→10 | 1 |
| 6→36 | 1 | 27→12 | 2 |
| 8→38 | 2 | 29→14 | 1 |
| 12→42 | 1 | 32→16 | 2 |
| 14→44 | 2 | 36→21 | 1 |
| Depot-Trip | Numbers | Depot-Trip | Numbers |
|---|---|---|---|
| Depot1→10 | 3 | Depot1→16 | 2 |
| Depot1→12 | 2 | Depot1→21 | 3 |
| Depot1→14 | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, H.; Zhao, J. Optimizing Modular Vehicle Public Transportation Services with Short-Turning Strategy and Decoupling/Coupling Operations. Sustainability 2025, 17, 870. https://doi.org/10.3390/su17030870
Cao H, Zhao J. Optimizing Modular Vehicle Public Transportation Services with Short-Turning Strategy and Decoupling/Coupling Operations. Sustainability. 2025; 17(3):870. https://doi.org/10.3390/su17030870
Chicago/Turabian StyleCao, Honglu, and Jiandong Zhao. 2025. "Optimizing Modular Vehicle Public Transportation Services with Short-Turning Strategy and Decoupling/Coupling Operations" Sustainability 17, no. 3: 870. https://doi.org/10.3390/su17030870
APA StyleCao, H., & Zhao, J. (2025). Optimizing Modular Vehicle Public Transportation Services with Short-Turning Strategy and Decoupling/Coupling Operations. Sustainability, 17(3), 870. https://doi.org/10.3390/su17030870