
Extraction and Analysis of the Spatial Morphology of a Heritage Village Based on Digital Technology and Weakly Supervised Point Cloud Segmentation Methods: An Innovative Application in the Case of Xisongbi Village in Jiexiu City, Shanxi Province

Abstract
1. Introduction
1.1. Backgrade
1.2. Research Aim
2. Study Area
3. Methods
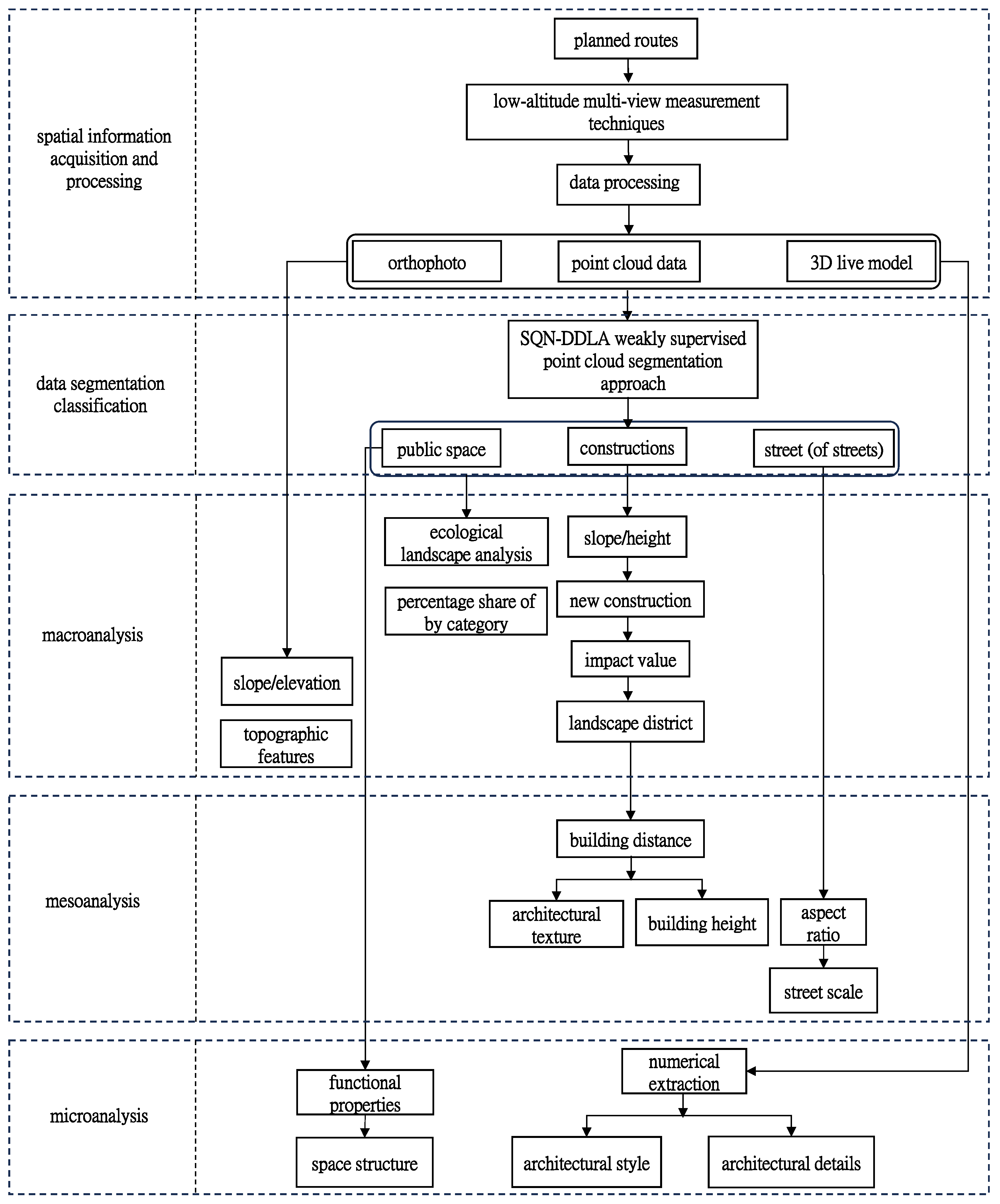
3.1. Research Methodology
3.2. Acquisition and Processing of Spatial Information
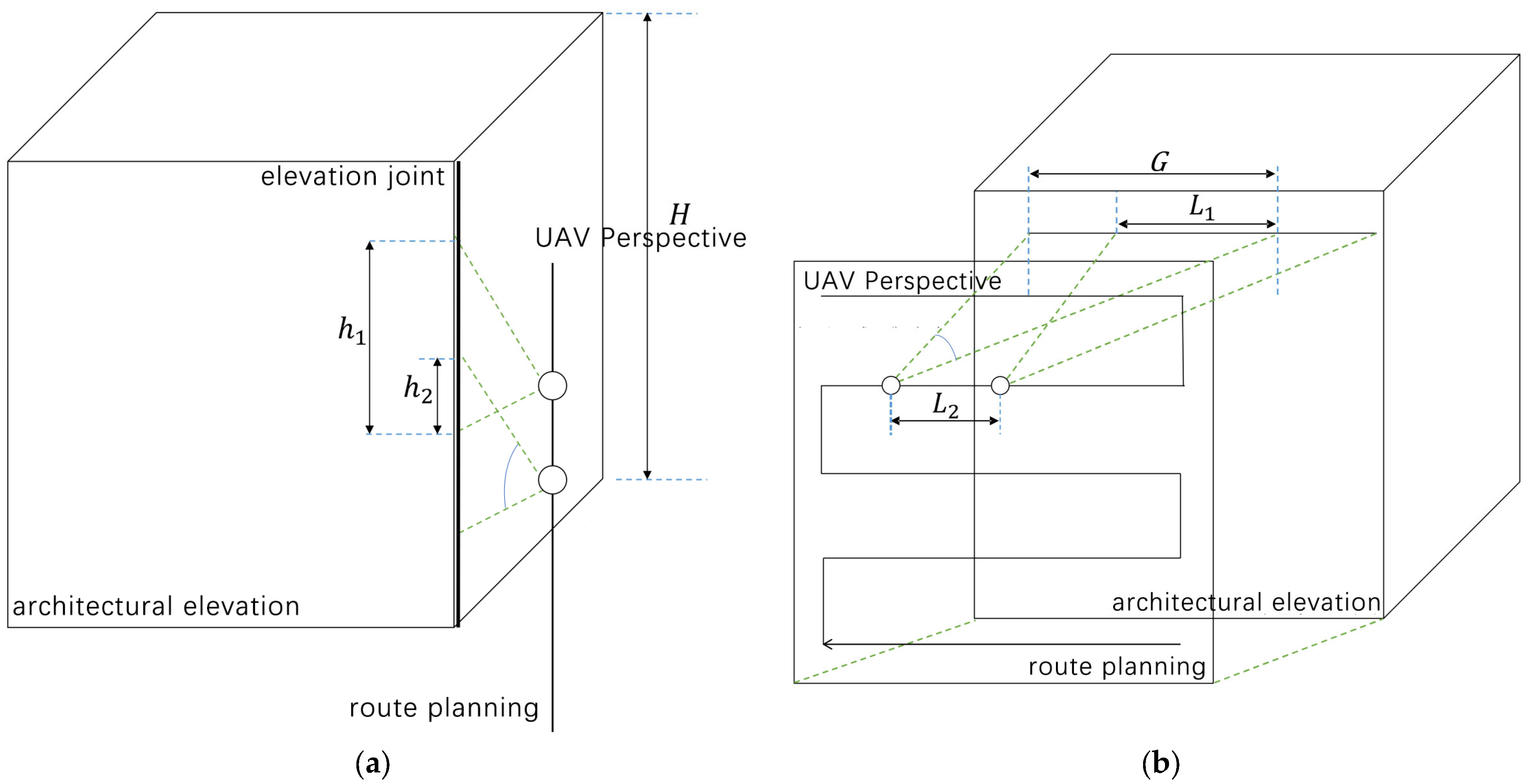
Data Acquisition and Processing
3.3. Point Cloud Segmentation Processing
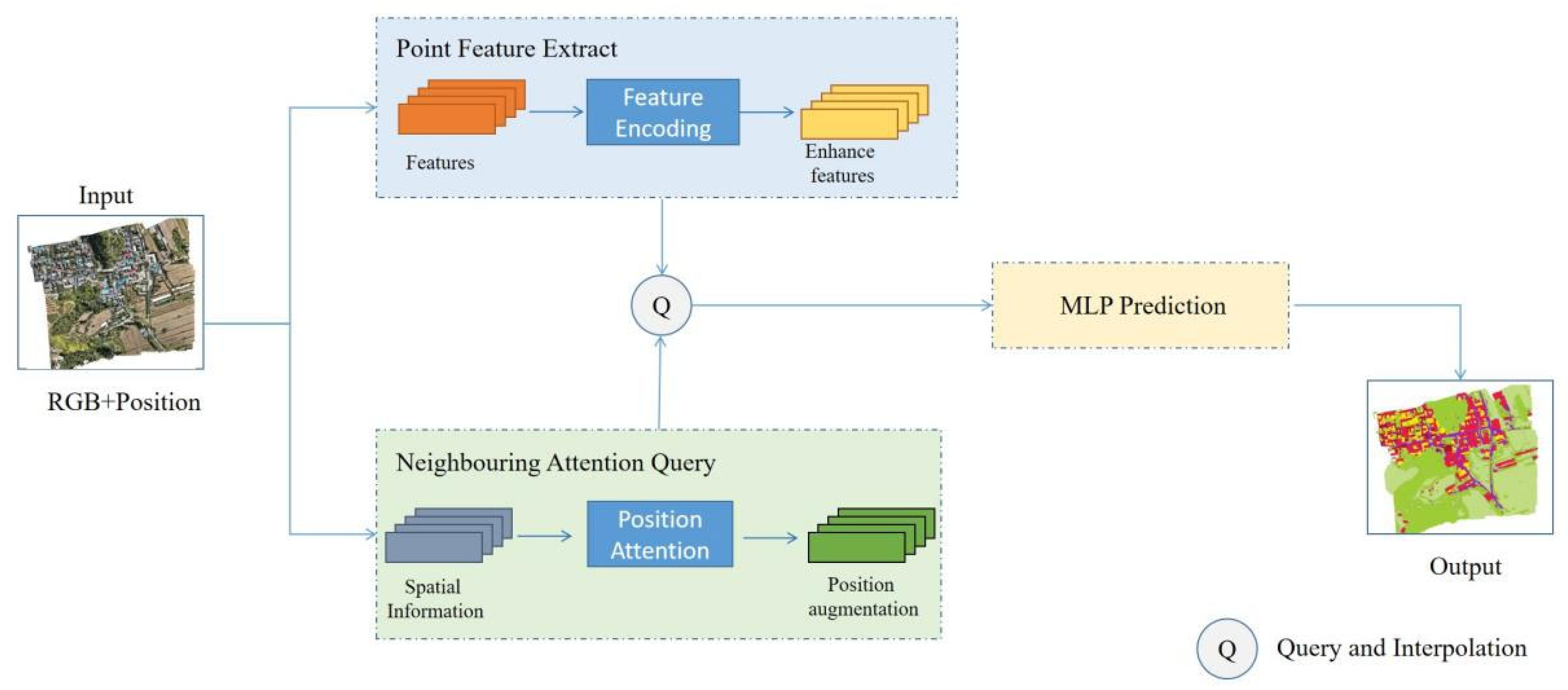
3.3.1. DDLA Concepts
- (1)
- In this study, the self-attention mechanism and the attention pooling block are introduced to improve the feature expression ability by combining local aggregation and spatial location coding.
- (2)
- We improved the handling of weakly monitored labels (unmarked points, ignored labels, etc.) to reduce unnecessary interference.
- (3)
- Through the innovative weakly supervised point cloud segmentation algorithm, we can obtain finer and more accurate point cloud segmentation results and more efficiently and accurately extract and analyze the spatial elements of the studied traditional village areas.
- (4)
- These innovative points improve the model’s learning ability under weakly supervised conditions, especially when dealing with complex data such as large point cloud data, which increases the model’s robustness and accuracy.
3.3.2. Self-Attention Block
3.3.3. Attention Pooling Blocks
4. Experiment
4.1. Comparative Experiment
4.2. Generalization Experiment
5. Results
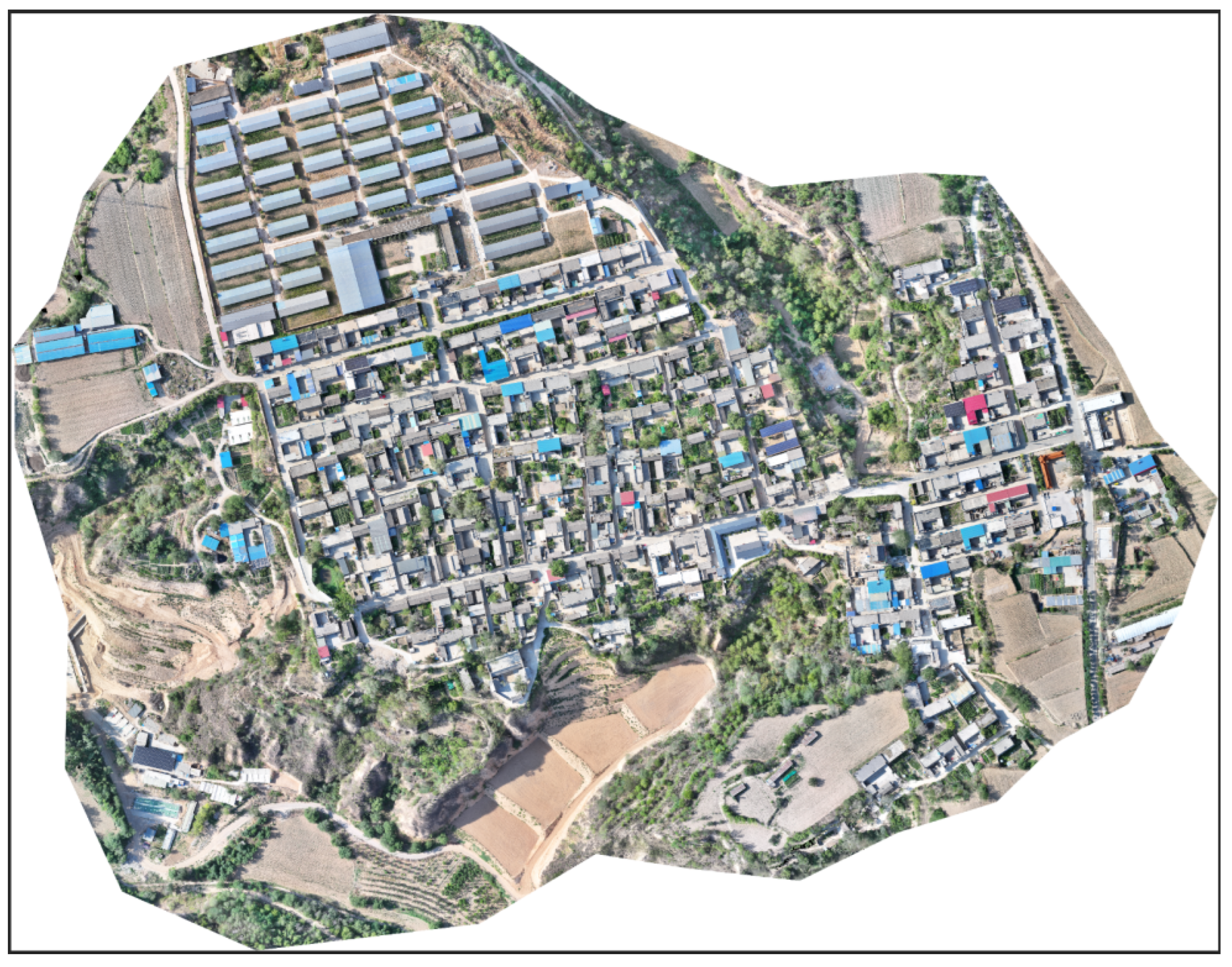
5.1. Orthophoto and 3D Model
5.2. Point Cloud Segmentation Results
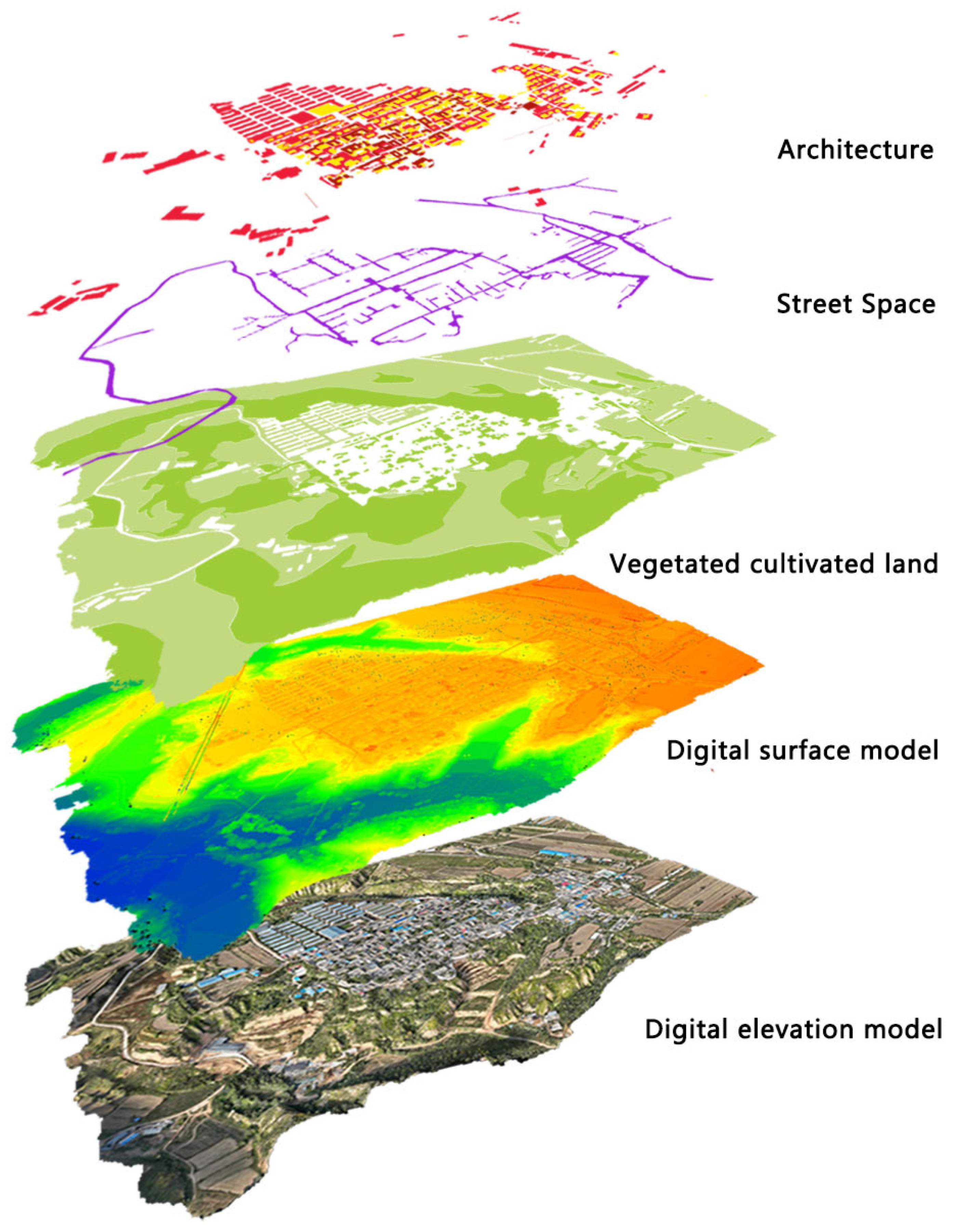
5.3. Spatial Form Featurepoint Cloud Segmentation Results
6. Discussion
6.1. Macro-Analysis
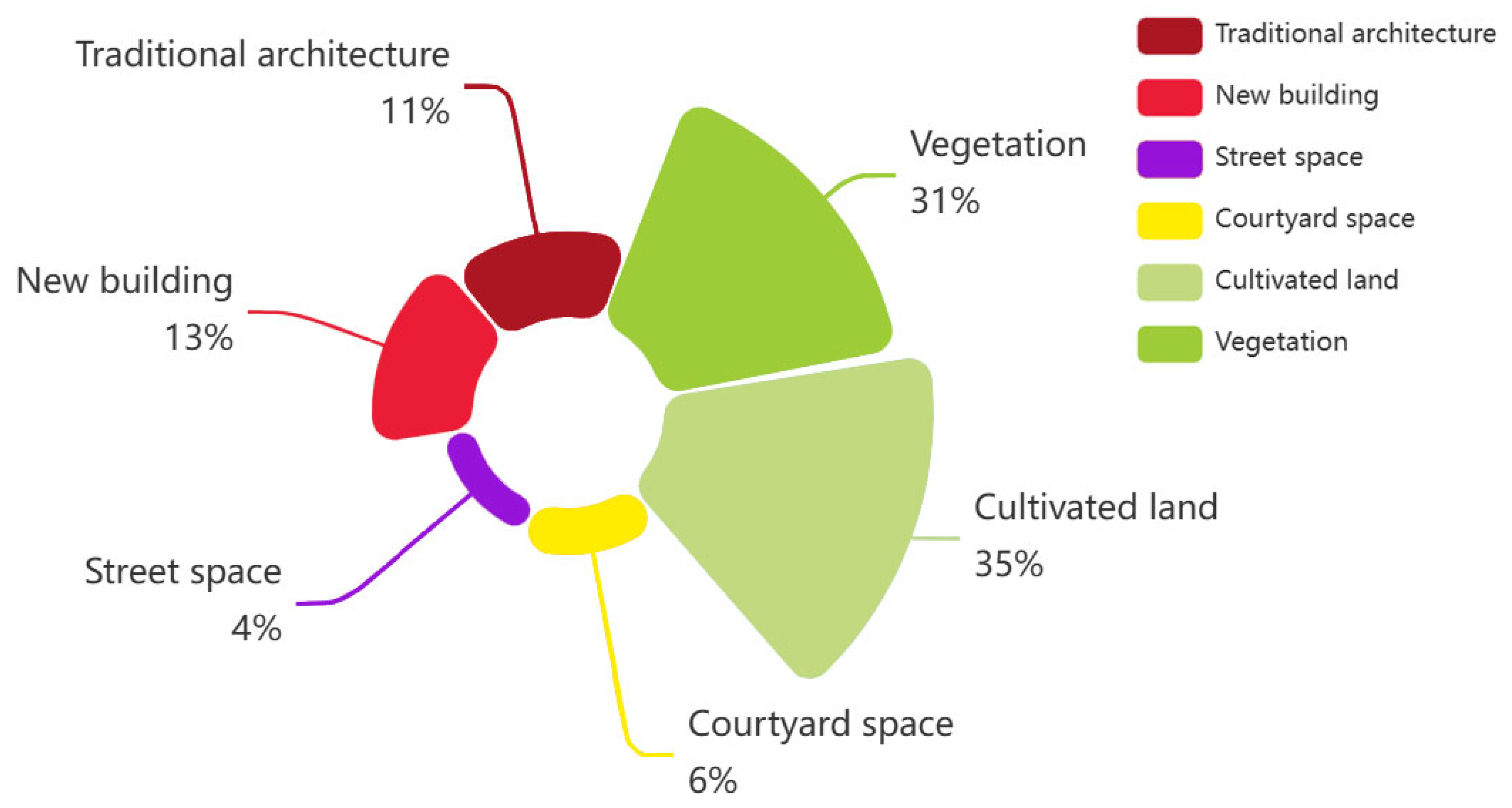
6.1.1. Landscape Zoning Study
6.1.2. Characterization of Settlement Topography
6.2. Meso-Analysis
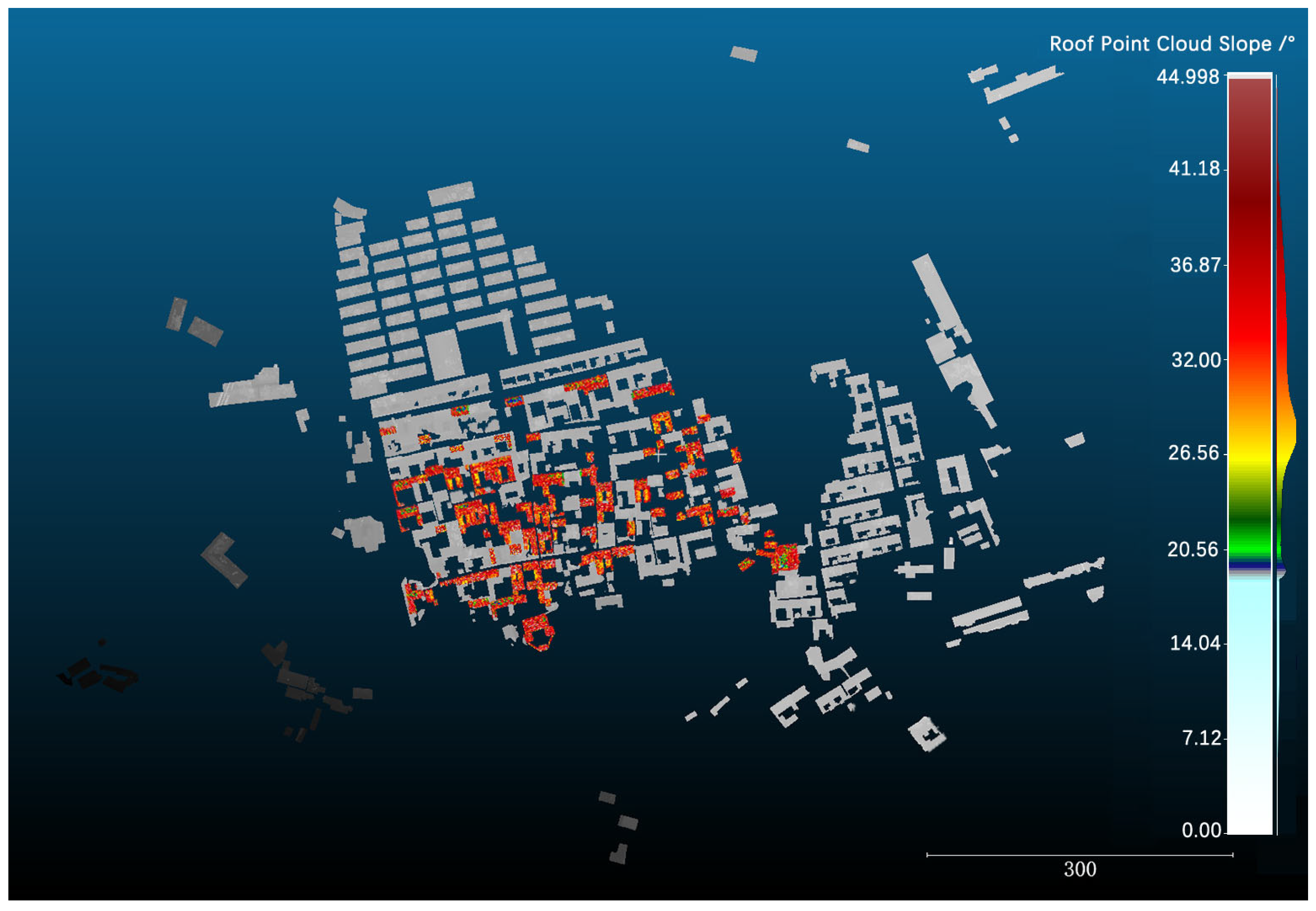
6.2.1. Built Fabric Analysis
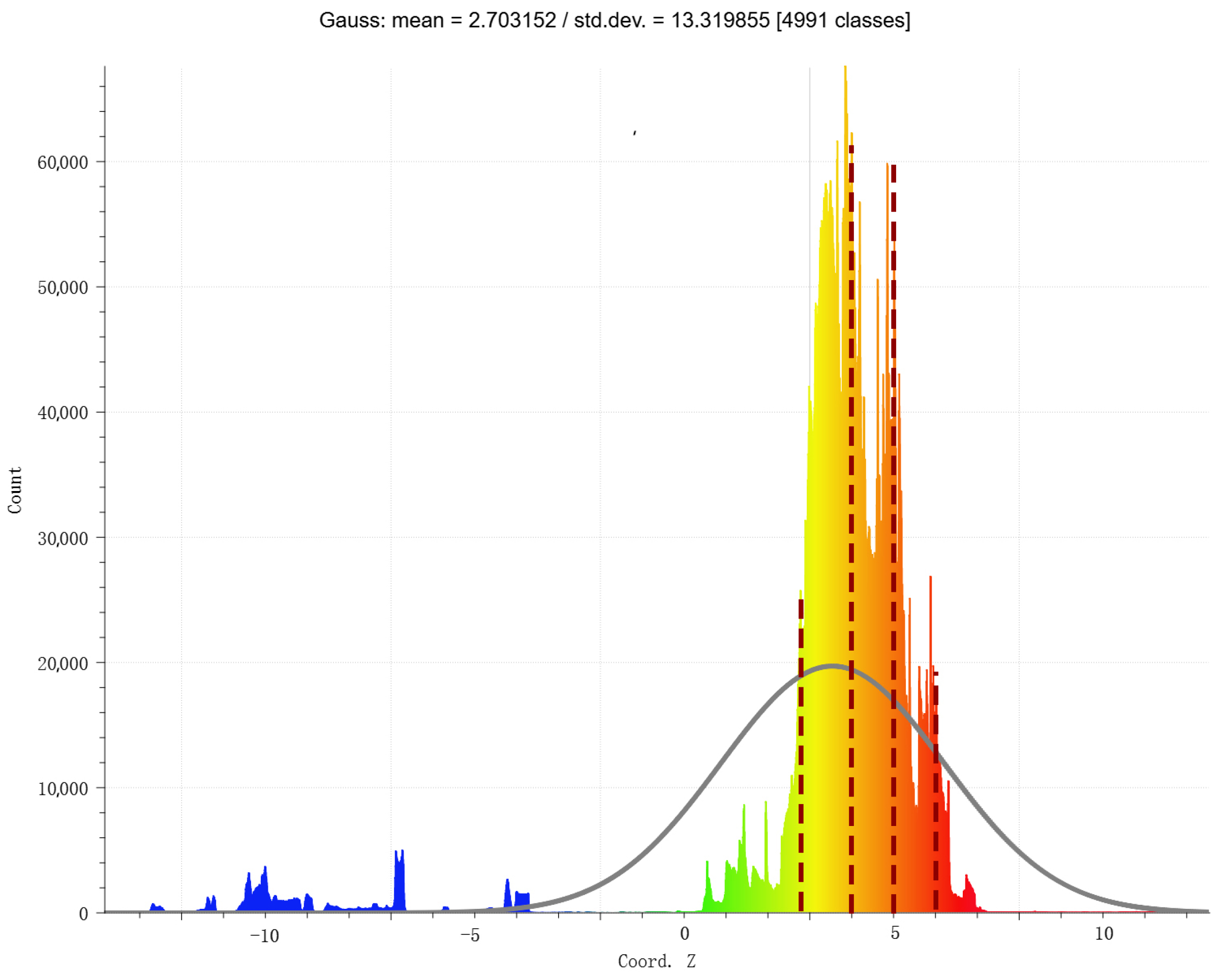
6.2.2. Building Height Analysis
6.2.3. Cyberspace Analysis of Streets and Alleys
6.3. Micro-Analysis
6.3.1. Analysis of Public Space
6.3.2. Analysis of Architectural Features
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| GCP | Ground Control Point |
| DSM | Digital Surface Modeling |
References
- Zheng, X.; Wu, J.; Deng, H. Spatial distribution and land use of traditional villages in southwest China. Sustainability 2021, 13, 6326. [Google Scholar] [CrossRef]
- Xia, J.; Gu, X.; Fu, T.; Ren, Y.; Sun, Y. Trends and Future Directions in Research on the Protection of Traditional Village Cultural Heritage in Urban Renewal. Buildings 2024, 14, 1362. [Google Scholar] [CrossRef]
- Wang, M.; Webber, M.; Finlayson, B.; Barnett, J. Rural industries and water pollution in China. J. Environ. Manag. 2008, 86, 648–659. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Du, C.; Yao, Y.; Gui, Y. Dynamic influencing mechanism of traditional settlements experiencing urbanization: A case study of Chengzi Village. J. Clean. Prod. 2021, 320, 128462. [Google Scholar] [CrossRef]
- Lu, S.; Li, G.; Xu, M. The linguistic landscape in rural destinations: A case study of Hongcun Village in China. Tour. Manag. 2020, 77, 104005. [Google Scholar] [CrossRef]
- Hu, X.; Li, H.; Zhang, X.; Chen, X.; Yuan, Y. Multi-dimensionality and the totality of rural spatial restructuring from the perspective of the rural space system: A case study of traditional villages in the ancient Huizhou region, China. Habitat Int. 2019, 94, 102062. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Y. Revitalize the world’s countryside. Nature 2017, 548, 275–277. [Google Scholar] [CrossRef]
- Qin, R.J.; Leung, H.H. Becoming a traditional village: Heritage protection and livelihood transformation of a Chinese village. Sustainability 2021, 13, 2331. [Google Scholar] [CrossRef]
- Turner, M.G. Spatial simulation of landscape changes in Georgia: A comparison of 3 transition models. Landsc. Ecol. 1987, 1, 29–36. [Google Scholar] [CrossRef]
- Hulshoff, R.M. Landscape indices describing a Dutch landscape. Landsc. Ecol. 1995, 10, 101–111. [Google Scholar] [CrossRef]
- Ma, H.D.; Tong, Y. Spatial differentiation of traditional villages using ArcGIS and GeoDa: A case study of Southwest China. Ecol. Inform. 2022, 68, 101416. [Google Scholar] [CrossRef]
- Liu, S.; Ge, J.; Li, W.; Bai, M. Historic environmental vulnerability evaluation of traditional villages under geological hazards and influencing factors of adaptive capacity: A district-level analysis of Lishui, China. Sustainability 2020, 12, 2223. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, Y.; Liu, L.; Lu, S.; Zhang, J. Strategy analysis for the interaction between tourism development and local eco-environment in traditional villages. J. Environ. Prot. Ecol. 2020, 21, 2279–2289. [Google Scholar]
- Saadatseresht, M.; Hashempour, A.H.; Hasanlou, M. UAV photogrammetry: A practical solution for challenging mapping projects. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 619–623. [Google Scholar] [CrossRef]
- Tao, C.; Watts, B.; Ferraro, C.C.; Masters, F.J. A multivariate computational framework to characterize and rate virtual Portland cements. Comput.-Aided Civ. Infrastruct. Eng. 2019, 34, 266–278. [Google Scholar] [CrossRef]
- Guan, S.; Zhu, Z.; Wang, G. A review on UAV-based remote sensing technologies for construction and civil applications. Drones 2022, 6, 117. [Google Scholar] [CrossRef]
- Taddia, Y.; González-García, L.; Zambello, E.; Pellegrinelli, A. Quality assessment of photogrammetric models for façade building reconstruction using DJIPhantom 4, R.T.K. Remote Sens. 2020, 12, 3144. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Zheng, X.; Wang, F.; Li, Z. A multi-UAV cooperative route planning methodology for 3D fine-resolution building model reconstruction. ISPRS J. Photogramm. Remote Sens. 2018, 146, 483–494. [Google Scholar] [CrossRef]
- Reshetyuk, Y. Terrestrial Laser Scanning: Error Sources, Self-Calibration and Direct Georeferencing; VDM Verlag Dr. Muller: Riga, Latvia, 2009. [Google Scholar]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned aerial vehicle for remote sensing applications—A review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Liu, C.; Sui, H.; Huang, L. Identification of building damage from UAV-based photogrammetric point clouds using supervoxel segmentation and latent dirichlet allocation model. Sensors 2020, 20, 6499. [Google Scholar] [CrossRef] [PubMed]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, P.L.; Chave, J.; Danson, M.; Disney, M.; Gaulton, R.; et al. Terrestrial laser scanning in forest ecology: Expanding the horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Pytharouli, S.; Souter, J.; Tziavou, O. Unmanned Aerial Vehicle (UAV) based mapping in engineering surveys: Technical considerations for optimum results. In Proceedings of the 4th Joint International Symposium on Deformation Monitoring, Athens, Greece, 15–17 May 2019. [Google Scholar] [CrossRef]
- Iizuka, K.; Ogura, T.; Akiyama, Y.; Yamauchi, H.; Hashimoto, T.; Yamada, Y. Improving the 3D model accuracy with a post-processing kinematic (PPK) method for UAS surveys. Geocarto Int. 2022, 37, 4234–4254. [Google Scholar] [CrossRef]
- Guarnieri, A.; Remondino, F.; Vettore, A. Digital photogrammetry and TLS data fusion applied to Cultural Heritage 3D modeling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 1–6. [Google Scholar]
- Tan, G.; Zhu, J.; Chen, Z. Deep learning based identification and interpretability research of traditional village heritage value elements: A case study in Hubei Province. Herit. Sci. 2024, 12, 200. [Google Scholar] [CrossRef]
- Cappellazzo, M.; Patrucco, G.; Spanò, A. ML Approaches for the Study of Significant Heritage Contexts: An Application on Coastal Landscapes in Sardinia. Heritage 2024, 7, 5521–5546. [Google Scholar] [CrossRef]
- Aissou, B.E.; Aissa, A.B.; Dairi, A.; Harrou, F.; Wichmann, A.; Kada, M. Building roof superstructures classification from imbalanced and low density airborne LiDAR point cloud. IEEE Sens. J. 2021, 21, 14960–14976. [Google Scholar] [CrossRef]
- Liao, L.; Tang, S.; Liao, J.; Li, X.; Wang, W.; Li, Y.; Guo, R. A supervoxel-based random forest method for robust and effective airborne LiDAR point cloud classification. Remote Sens. 2022, 14, 1516. [Google Scholar] [CrossRef]
- Haznedar, B.; Bayraktar, R.; Ozturk, A.E.; Arayici, Y. Implementing PointNet for point cloud segmentation in the heritage context. Herit. Sci. 2023, 11, 2. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. Pointnet: Deep learning on point sets for 3d classification and segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 652–660. [Google Scholar] [CrossRef]
- Graham, B.; Engelcke, M.; Van Der Maaten, L. 3d semantic segmentation with submanifold sparse convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 9224–9232. [Google Scholar] [CrossRef]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar] [CrossRef]
- Li, Y.; Bu, R.; Sun, M.; Wu, W.; Di, X.; Chen, B. Pointcnn: Convolution on x-transformed points. Adv. Neural Inf. Process. Syst. 2018, 31. [Google Scholar] [CrossRef]
- Choy, C.; Gwak, J.Y.; Savarese, S. 4d spatio-temporal convnets: Minkowski convolutional neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–19 June 2019; pp. 3075–3084. [Google Scholar] [CrossRef]
- Hu, Q.; Yang, B.; Xie, L.; Rosa, S.; Guo, L.; Wang, Z.; Trigoni, N.; Markham, A. Randla-net: Efficient semantic segmentation of large-scale point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11108–11117. [Google Scholar] [CrossRef]
- Liu, Z.; Tang, H.; Lin, Y.; Han, S. Point-voxel cnn for efficient 3d deep learning. Adv. Neural Inf. Process. Syst. 2019, 32. [Google Scholar] [CrossRef]
- Thomas, H.; Qi, C.R.; Deschaud, J.E.; Marcotegui, B.; Goulette, F.; Guibas, L.J. Kpconv: Flexible and deformable convolution for point clouds. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 6411–6420. [Google Scholar]
- Zhu, X.; Zhou, H.; Wang, T.; Hong, Z.; Ma, Y.; Li, W.; Li, H.; Lin, D. Cylindrical and asymmetrical 3d convolution networks for lidar segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 9939–9948. [Google Scholar] [CrossRef]
- Hu, Q.; Yang, B.; Fang, G.; Guo, Y.; Leonardis, A.; Trigoni, N.; Markham, A. Sqn: Weakly-supervised semantic segmentation of large-scale 3d point clouds. In European Conference on Computer Vision; Springer Nature: Cham, Switzerland, 2022; pp. 600–619. [Google Scholar] [CrossRef]
- Li, J.; Chu, J.; Wang, Y.; Ma, M.; Yang, X. Reconstruction of traditional village spatial texture based on parametric analysis. Wirel. Commun. Mob. Comput. 2022, 2022, 5151421. [Google Scholar] [CrossRef]
- Elkhrachy, I. Accuracy assessment of low-cost unmanned aerial vehicle (UAV) photogrammetry. Alex. Eng. J. 2021, 60, 5579–5590. [Google Scholar] [CrossRef]
- Xi, R.; Jiang, W.; Meng, X.; Chen, H.; Chen, Q. Bridge monitoring using BDS-RTK and GPS-RTK techniques. Measurement 2018, 120, 128–139. [Google Scholar] [CrossRef]
- Valente DS, M.; Momin, A.; Grift, T.; Hansen, A. Accuracy and precision evaluation of two low-cost RTK global navigation satellite systems. Comput. Electron. Agric. 2020, 168, 105142. [Google Scholar] [CrossRef]
- Aguilar, M.A.; Jiménez-Lao, R.; Nemmaoui, A.; Aguilar, F.J. Geometric accuracy assessment of deimos-2 panchromatic stereo pairs: Sensor orientation and digital surface model production. Sensors 2020, 20, 7234. [Google Scholar] [CrossRef]
- Zeybek, M.; Şanlıoğlu, İ. Point cloud filtering on UAV based point cloud. Measurement 2019, 133, 99–111. [Google Scholar] [CrossRef]
- Gao, C.; Wang, Z.; Zhou, J. Exploration of the application strategy of three-dimensional digital technology mapping in traditional village architectural heritage conservation research. J. Inn. Mong. Univ. Technol. (Nat. Sci. Ed.) 2020, 39, 379–385. (In Chinese) [Google Scholar] [CrossRef]
- Zhao, Y.; Zhu, Z.; Huang, B.; Fei, J.; Jiang, J. Residential Identification in Jiaxing Old Town Based on UAV Tilt Photography. J. Zhejiang Univ. Eng. Ed. 2021, 55, 1083–1089. (In Chinese) [Google Scholar]
- Peng, P.; Zhou, X.; Wu, S.; Zhang, Y.; Zhao, J.; Zhao, L.; Wu, J.; Rong, Y. An exploration of the self-similarity of traditional settlements: The case of Xiaoliangjiang Village in Jingxing, Hebei, China. Herit. Sci. 2024, 12, 196. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | Data Acquisition Method | Main Outcome |
|---|---|---|
| Field Research | UAV low-altitude multi-view photogrammetry (integrating tilt photogrammetry and close-range photogrammetry) was employed to capture image data of traditional settlements and important historical buildings. | High-resolution images of the traditional village of Xisongbi and its historical buildings were obtained. |
| 3D Modeling and Processing | The acquired image data were imported into 3D modeling software for processing. | High-precision 3D real-view models, orthophotos, and point cloud data were generated, providing foundational data for subsequent analysis. |
| Spatial Morphology Extraction | The generated point cloud data were processed, segmented, and classified. | Spatial morphological elements of the traditional village were extracted at macro, meso, and micro levels. |
| UAV Specifications | UAV Parameters | Camera Specifications | Camera Parameters |
|---|---|---|---|
| Diagonal wheelbase | 302 mm | Camera model | Hasselblad L2D-20c |
| Maximum take-off weight | 960 g | Image sensor | 1/2 inch CMOS, 20 million px |
| Maximum altitude | 6000 m | Equivalent focal length | 24 mm |
| GNSS | GPS + GLONASS + Galileo + Beidou | Camera angle | 84° |
| Hovering accuracy | Vertical: ±0.1 m, Horizontal: ±0.1 m | Lens iris | f/2.8 |
| Battery power | 5000 mAh | Size of image | 5280 × 3956 |
| Hovering time | 45 min | Color pattern | Dlog-M (10 bit), HDR video (HLG 10 bit) |
| GCP | Field Survey Data | Deviation | ||||
|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | dX (m) | dY (m) | dZ (m) | |
| 1 | 4,093,608.612 | 584,181.028 | 947.877 | 0.0287 | 0.3131 | −0.0374 |
| 2 | 4,093,617.074 | 584,113.894 | 946.142 | −0.0124 | 0.0112 | 0.0271 |
| 3 | 4,093,577.473 | 584,038.893 | 945.131 | 0.0111 | 0.0142 | −0.2113 |
| 4 | 4,093,558.911 | 584,034.97 | 941.459 | −0.0252 | 0.1637 | −0.0438 |
| 5 | 4,093,610.642 | 583,952.754 | 945.17 | 0.0172 | 0.0286 | −0.0254 |
| 6 | 4,093,547.986 | 583,914.41 | 943.528 | 0.0423 | 0.0367 | 0.0226 |
| 7 | 4,093,602.344 | 583,867.815 | 944.546 | −0.0368 | −0.0251 | 0.0541 |
| 8 | 4,093,715.501 | 583,841.577 | 945.149 | −0.0123 | 0.0113 | 0.0114 |
| 9 | 4,093,723.687 | 583,960.747 | 946.056 | 0.0259 | −0.0425 | −0.0249 |
| 10 | 4,093,809.616 | 584,115.351 | 947.128 | 0.0468 | 0.0334 | −0.0156 |
| 11 | 4,093,646.733 | 584,267.79 | 949.369 | −0.0178 | 0.0122 | 0.0329 |
| 12 | 4,093,546.563 | 584,263.675 | 950.061 | 0.0498 | 0.0458 | 0.0216 |
| 13 | 4,093,532.849 | 584,312.357 | 951.133 | 0.0237 | −0.0125 | −0.0274 |
| 14 | 4,093,590.436 | 584,393.441 | 953.896 | 0.0429 | −0.0349 | 0.0564 |
| 15 | 4,093,676.804 | 584,363.442 | 951.716 | −0.0111 | 0.0274 | 0.0254 |
| 16 | 4,093,797.444 | 584,315.559 | 950.572 | −0.0294 | 0.0369 | −0.0235 |
| 17 | 4,093,661.076 | 584,285.025 | 950.361 | 0.0246 | −0.0186 | 0.0358 |
| 18 | 4,093,647.181 | 584,176.039 | 947.807 | 0.0125 | 0.0425 | 0.0142 |
| 19 | 4,093,795.373 | 584,099.403 | 946.988 | −0.0223 | 0.0291 | −0.0329 |
| 20 | 4,093,754.054 | 583,950.697 | 945.816 | 0.0224 | 0.0524 | 0.0222 |
| 21 | 4,093,729.174 | 584,048.387 | 947.149 | 0.0423 | 0.0127 | 0.0142 |
| Methods | MIoU(%) | Traditional Buildings | Alleys and Streets | New Construction | Courtyard | Vegetation | Clutter |
|---|---|---|---|---|---|---|---|
| SQN [42] | 53.95 | 49.5 | 48.42 | 66.63 | 54.42 | 46.44 | 58.29 |
| Ours | 63.55 | 62.3 | 49.76 | 68.52 | 65.71 | 57.58 | 77.40 |
| RandLA-Net [38] | 30.03 | 16.21 | 28.29 | 48.40 | 15.44 | 35.42 | 36.44 |
| Name of Building | Building Models | Length (m) | Width (m) | Hright (m) | Area (m2) |
|---|---|---|---|---|---|
| Temple of the Three Guan’s |  | 9.8 | 7 | 9.5 | 68.6 |
| Xingguo Temple |  | 29.8 | 36.2 | 6.6 | 600 |
| Tiandi Hall |  | 4 | 2.1 | 3.6 | 8.4 |
| Name of Room Door and Window Style | Room Door and Window Style Types | Door and Window Sample 1 | Door and Window Sample 2 |
|---|---|---|---|
| Traditional Courtyard Main Room Door and Window Style |  |  |  |
| Traditional Courtyard Wing Room Door and Window Style |  |  |  |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, R.; Wang, J.; Li, L.; Chen, D. Extraction and Analysis of the Spatial Morphology of a Heritage Village Based on Digital Technology and Weakly Supervised Point Cloud Segmentation Methods: An Innovative Application in the Case of Xisongbi Village in Jiexiu City, Shanxi Province. Sustainability 2025, 17, 3349. https://doi.org/10.3390/su17083349
Chang R, Wang J, Li L, Chen D. Extraction and Analysis of the Spatial Morphology of a Heritage Village Based on Digital Technology and Weakly Supervised Point Cloud Segmentation Methods: An Innovative Application in the Case of Xisongbi Village in Jiexiu City, Shanxi Province. Sustainability. 2025; 17(8):3349. https://doi.org/10.3390/su17083349
Chicago/Turabian StyleChang, Ruixin, Jinping Wang, Lei Li, and Dengxing Chen. 2025. "Extraction and Analysis of the Spatial Morphology of a Heritage Village Based on Digital Technology and Weakly Supervised Point Cloud Segmentation Methods: An Innovative Application in the Case of Xisongbi Village in Jiexiu City, Shanxi Province" Sustainability 17, no. 8: 3349. https://doi.org/10.3390/su17083349
APA StyleChang, R., Wang, J., Li, L., & Chen, D. (2025). Extraction and Analysis of the Spatial Morphology of a Heritage Village Based on Digital Technology and Weakly Supervised Point Cloud Segmentation Methods: An Innovative Application in the Case of Xisongbi Village in Jiexiu City, Shanxi Province. Sustainability, 17(8), 3349. https://doi.org/10.3390/su17083349