Abstract
Unmanned aerial vehicles, particularly drones, have been increasingly deployed for different tasks in the community. They have become an important part of the economic and social benefits that society is exploiting from modern technology development. However, efforts are still required to further develop technologies which can mitigate the negative impacts. Among them, drone noise is considered a major health concern for the community. The present study undertakes an experimental investigation of the effectiveness of blade modifications on drone noise in an aeroacoustic wind tunnel facility. A quadcopter drone is programmed to operate in both hover and forward flights. Three modified blade configurations, including trailing-edge serrations combined serration–finlets, and an unmodified (baseline) blade, are manufactured. The far-field noise signals are recorded by two polar microphone arrays to quantify both the magnitude and directivity. The results show that all modified blades are able to reduce the drone noise at mid-to-high frequencies in both hover and forward flights, and this leads to a noticeable reduction in the overall sound pressure level. More importantly, the combined serration–finlet configuration outperforms all the other blades. Psychoacoustic analysis is also performed using the far-field acoustic time series. Interestingly, only the serration–finlet combination demonstrates a consistent reduction in the psychoacoustic annoyance levels, suggesting that it is important to use metrics from both acoustic and psychoacoustic analysis when developing noise mitigation strategies in the socio-economic context.
1. Introduction
The wider application of drones in urban areas brings economic and operational benefits to the society [1]; nevertheless, it also incurs a cost to the community. For instance, these vehicles tend to fly at a much lower altitude compared to conventional aircrafts and are able to operate at a much higher frequency of flights [2]. Hence, they present a new source of transportation noise in the urban environment due to their unique operational profiles. Exposure to the noise can potentially lead to health concerns in the community [3,4], and therefore, such exposure has become a key limiting factor toward public acceptance and further growth [5]. While considerable research efforts have been devoted to full-sized aircrafts, studies on understanding and controlling drone noise are relatively limited. When in operation, drones emit noise from several sources, including from electric motors, rotor blades, and induced flow interaction with the airframes. Yet, for most drones, the rotor noise is the dominant component [6], with motor noise having an impact over a limited frequency range [7]. As such, understanding the drone noise characteristics and subsequently addressing the drone noise pollution using noise mitigation strategies are essential for them to be integrated into urban settings.
Existing experimental research on drone noise can be broadly classified into those that are carried out in field tests and those that are conducted in controlled laboratories. Cabell et al. [8] and Zhang et al. [9] investigated the noise characteristics of drones with varying numbers of propulsors in an open field, where they were exposed to atmospheric disturbances. Their results showed the presence of higher harmonics of the blade passing frequencies (BPFs), with the amplitude comparable to the fundamental BPF. On the other hand, Zawdony and Pettingill [10] and Zhou et al. [11] experimentally investigated the quadcopter noise characteristics in both hover and forward flights in an aeroacoustic facility (i.e., controlled laboratory setting). For a quadcopter drone, effects of rotor–airframe interactions were prominent as well as increased broadband noise levels compared to isolated rotors. Moreover, during hover, the noise directivity of the quadcopter was comparable to that of an isolated rotor, whereas during forward flight, the loudest noise level was observed behind the instantaneous position of the quadcopter.
It is equally important to develop noise mitigation strategies for drones. Modifying the design of the blades appears to be a feasible approach. Among them, one promising development is the introduction of trailing-edge (TE) serrations inspired by the wing morphology of owls (for instance, see Figure 1 in Wei et al. [12]). When being applied to static aerofoils, TE serrations have shown to notably reduce trailing-edge noise, which can be attributed the to turbulent mixing between the pressure and suction sides, leading to a reduction in wake intensity [13,14] and the destructive interference due to the serration edges [15,16]. Ning et al. [17] applied trailing-edge serrations to small rotors at a relatively low Reynolds number of 5 × 104. Four different serration wavelength-to-amplitude ratios of 0.3, 0.6, 0.9, and 1.2 were tested in hover and forward flight conditions. Results showed that serrated rotors produced a reduction of approximately 1.5 dB in noise compared to the baseline with a straight trailing edge. Moreover, the serrations were effective at mid-to-high frequencies. Yang et al. [18] conducted a comprehensive study on the effect of different serration wavelength-to-amplitude ratios and the percentage of span covered in serrations on the aerodynamic and aeroacoustic performance of rotors. They concluded that in the forward flight condition, there were no significant differences between serrations set up along the entire span compared to those along only half the span. The maximum noise reduction was observed when the serration wavelength was equal to its amplitude, similar to the findings from other studies with trailing-edge serrated rotors [17,19]. Extending from serrations, Wei et al. [12] proposed a bio-inspired propeller that combined the serrations with cicada wing geometry. They observed up to 5.5 dB reduction in the overall sound pressure level. Also recently, Shi and Kollman [20] performed large eddy simulations on a NACA 0012 aerofoil fitted with a serration–finlet trailing edge. Their serration–finlet configuration combined the serrations at the trailing edge with a row of fin-like structures added just upstream of the trailing edge. Though not directly applied to a rotor blade, they reported a reduction in the overall sound pressure level by approximately 20 dB—significantly more than the serration-only configuration.
Drone noise, having distinct acoustic characteristics, can be a potential health concern for the community. However, research into the psychoacoustics of drone noise is also relatively more limited than that of conventional aircrafts. Unlike much larger passenger aircrafts for which an established regulatory framework on noise exists, noise regulations on drones remain a topic of discussion and require more research efforts [21]. Recent work on psychoacoustic annoyance from rotors and drones, such as Di et al. [22] and Torija et al. [23], identified that using psychoacoustic annoyance models based on sound quality metrics (Loudness, Tonality, Sharpness, etc.) can better correlate the estimated psychoacoustic annoyance level to that of the perceived annoyance level in actual listening tests. Di et al. [22] performed listening test on noise samples with strong tonal components. Their analysis suggested that the Tonality metric should be considered when evaluating the psychoacoustic annoyance for rotors (i.e., noise sources with strong tonal components). Later, Torija et al. [23] carried out a more detailed listening test on the electric propulsion systems commonly found in drones. They observed that the psychoacoustic annoyance determined from the sound quality metrics is closely correlated with the perceived level of annoyance reported by the listeners.
Clearly, both the noise and the perceived psychoacoustic annoyance levels could influence the wider deployment of drones in our economy and daily life. Hence, developing suitable noise control techniques and understanding their impact on the psychoacoustics are essential in ensuring a successful integration. Upon examining the existing research work, notable research gaps still exist in further exploring and understanding the effect of blade modifications on the noise characteristics of drones and, moreover, the associated psychoacoustic effects. In particular, using a combination of bio-inspired features, such as a combination of trailing-edge serrations and finlets, appears to be a promising approach. Therefore, the present study aims to take the first step to examine the acoustic and psychoacoustic characteristics of trailing-edge modified blades applied to a quadcopter drone in hover and forward flight conditions by conducting an experimental investigation in a controlled laboratory setting. Different modifications were made to the rotor blades, including trailing-edge serration and serration–finlet configurations. Far-field sound pressure levels, directivity patterns, and psychoacoustic sound quality metrics were determined from the measurements. The novelty of the present work is two-fold: Firstly, the study will shed light on the effectiveness of trailing-edge serration and the serration–finlet combination as passive noise control techniques for drones, and secondly, the study utilizes the psychoacoustic analysis to further correlate the noise reduction to the possible alleviation of psychoacoustic annoyance of drones. The majority of previous works were performed on a single rotor blades, and yet, the present study takes advantage of a programmable drone prototype. As such, the acoustic and psychoacoustic results can better inform regulatory bodies and policymakers on how to progress to integrate drones into the community, which in turn will affect the sustainable socio-economic development of the community.
2. Methodology
2.1. Experimental Facility and Operating Conditions
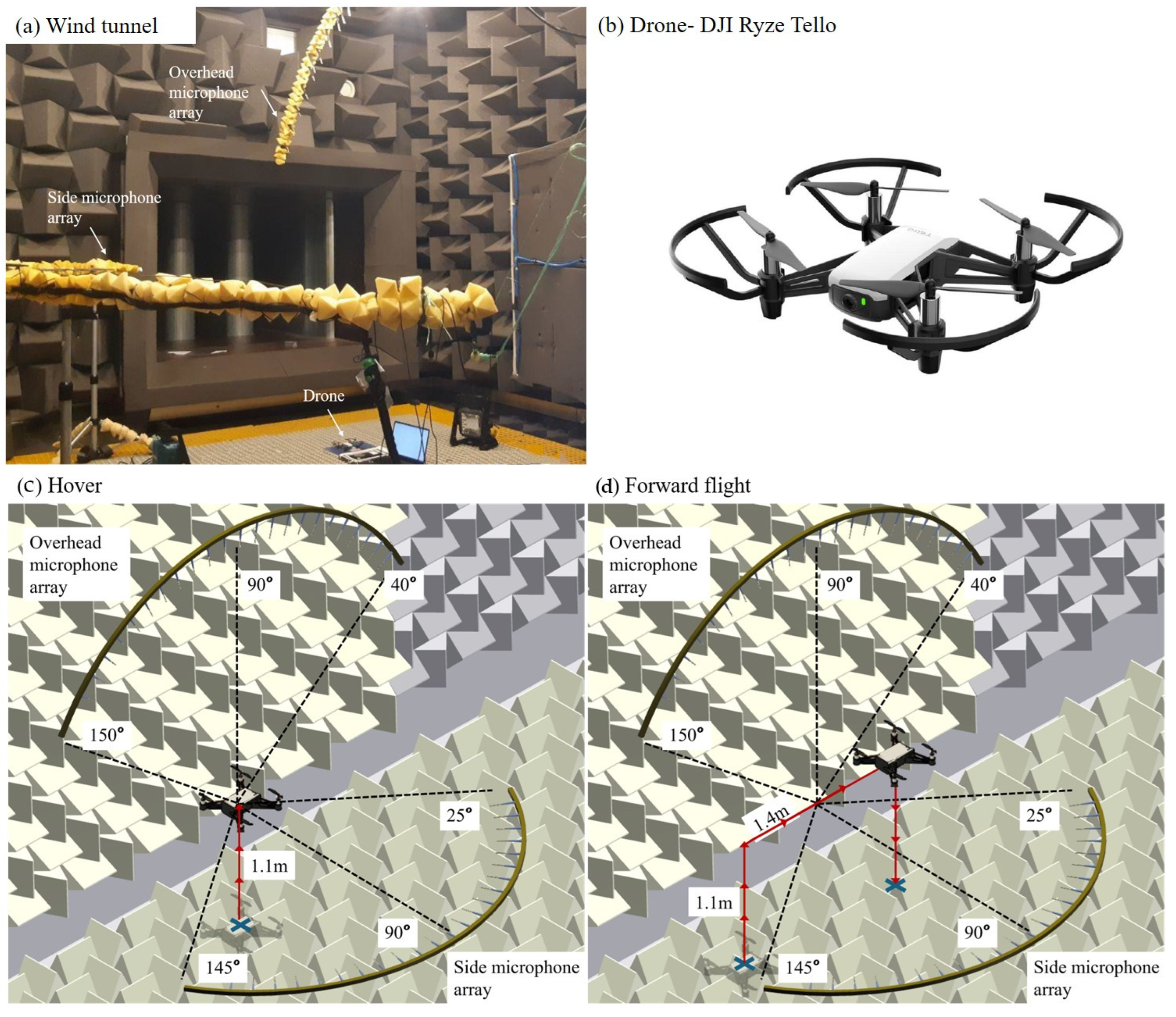
The experiments were carried out in the aeroacoustic wind tunnel facility at the University of Bristol. The facility has an anechoic chamber with dimensions of 7 m (L) × 4.5 m (W) × 3.5 m (H) and is fully anechoic down to 160 Hz. The temperature of the anechoic room was maintained at 20 ± 0.5 °C during the experiments so that the speed of sound remained relatively constant. The facility is equipped with two polar microphone arrays: one directly overhead of the open-jet nozzle along the nozzle horizontal centerline and the other at the side of the nozzle along the vertical centerline, as shown in Figure 1. The former has 23 GRAS 40PL free-field microphones covering a polar angle range of = to and the latter having 25 identical microphones covering = to . The GRAS 40PL microphone (G.R.A.S., Holte, Denmark) operates with an upper limit of 142 dB and a flat frequency response between 10 Hz and 20,000 Hz. All acoustic signals were simultaneously collected at a sampling rate of Hz using National Instrument (NI) PXIe-4499 (National Instrument, Austin, TX, USA) modules and synchronized by a PXIe-1082 chassis (National Instrument, Austin, TX, USA). For ease of reference, Table 1 summarizes the key parameters of the present measurement setup and the wind tunnel facility.
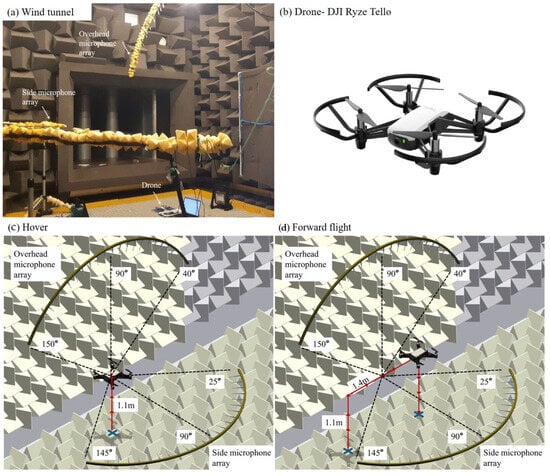
Figure 1.
Schematics of the experimental setup in the aeroacoustic facility with the far-field microphone arrays for (a) the anechoic chamber (b) Tello quadcopter, (c) hover flight, and (d) forward flight of the Tello drone.

Table 1.
Parameters for the measurement setup and the wind tunnel facility.
A DJI Tello quadcopter [24] (Da-Jiang Innovations, Shenzhen, China), shown in Figure 1b, was chosen as the platform for the experiments, as it fulfils several criteria that make the particular model suitable for the experiments. Firstly, it possesses a robust Vision Positioning System (VPS), allowing for stable hover indoors in a ‘sealed’ aeroacoustic wind tunnel environment. Secondly, its control system is programmable and well documented so that the control inputs for both the hover and forward flight conditions can be fine-tuned to ensure repeatability of the experiments. The nominal rotational speed of Tello in the hover condition is approximately 16,000 RPM (revolutions per minute). Table 2 summarizes the key specifications of the Tello quadcopter.
Table 2.
Specifications of the DJI Tello quadcopter.
The quadcopter was operated in two modes, namely, in hover, as shown in Figure 1c, and in forward flight, as seen in Figure 1d. In the hover flight condition, the quadcopter was programmed to lift off the ground vertically by 1.1 m. As such, the position of the quadcopter aligns with the microphones from both microphone arrays and is 1.75 m from the overhead array and 2.2 m from the side array. Therefore, the microphones are considered to capture the acoustic far-field of the quadcopter for frequencies above 200 Hz (i.e., more than one wavelength) [25]. In the forward flight condition, the quadcopter was programmed to take off vertically to the same height of 1.1 m and stabilize before moving forward for 1.4 m at a constant speed of 0.47 m/s. In this scenario, the microphones (i.e., ) are aligned with the mid-point of the flight path, as can be seen from Figure 1b. Based on the flight trajectory, the far-field acoustic signals were recorded for 4 s in the hover flight after the quadcopter was stablized and 3 s in the forward flight, covering the entire steady forward motion. Since there was no free-stream velocity for both flight conditions, the nozzle was fully covered with acoustic foams to minimize any reflection from the nozzle walls.
2.2. Baseline Blade and Serration–Finlet Modifications
To modify the blade geometry, a ‘Baseline’ blade was first designed to carry similar aerodynamic performance as the original blades from Tello. A Clark Y airfoil profile was used for the baseline case in the present study, since this airfoil profile is widely used for small rotors and has generally favorable performance and characteristics [26,27]. Moreover, the spanwise variations of the chord length and pitch approximately follow those of the original blades, as shown in Figure 2. Hence, the baseline rotor blade has a fixed pitch-to-diameter (P/D) ratio of 0.5. A summary of the design and operating parameters of the baseline rotor is shown in Table 3, where R is the radius of the rotor blade, and and denote the averaged chord length and that at 0.75 R of the blade, respectively.
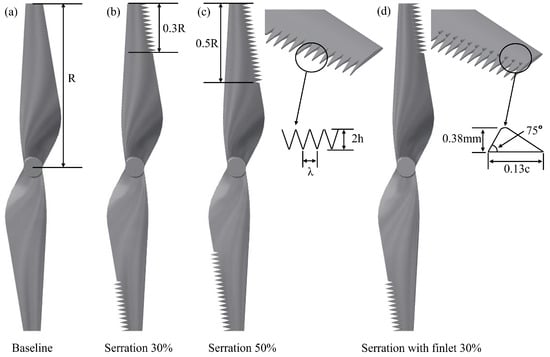
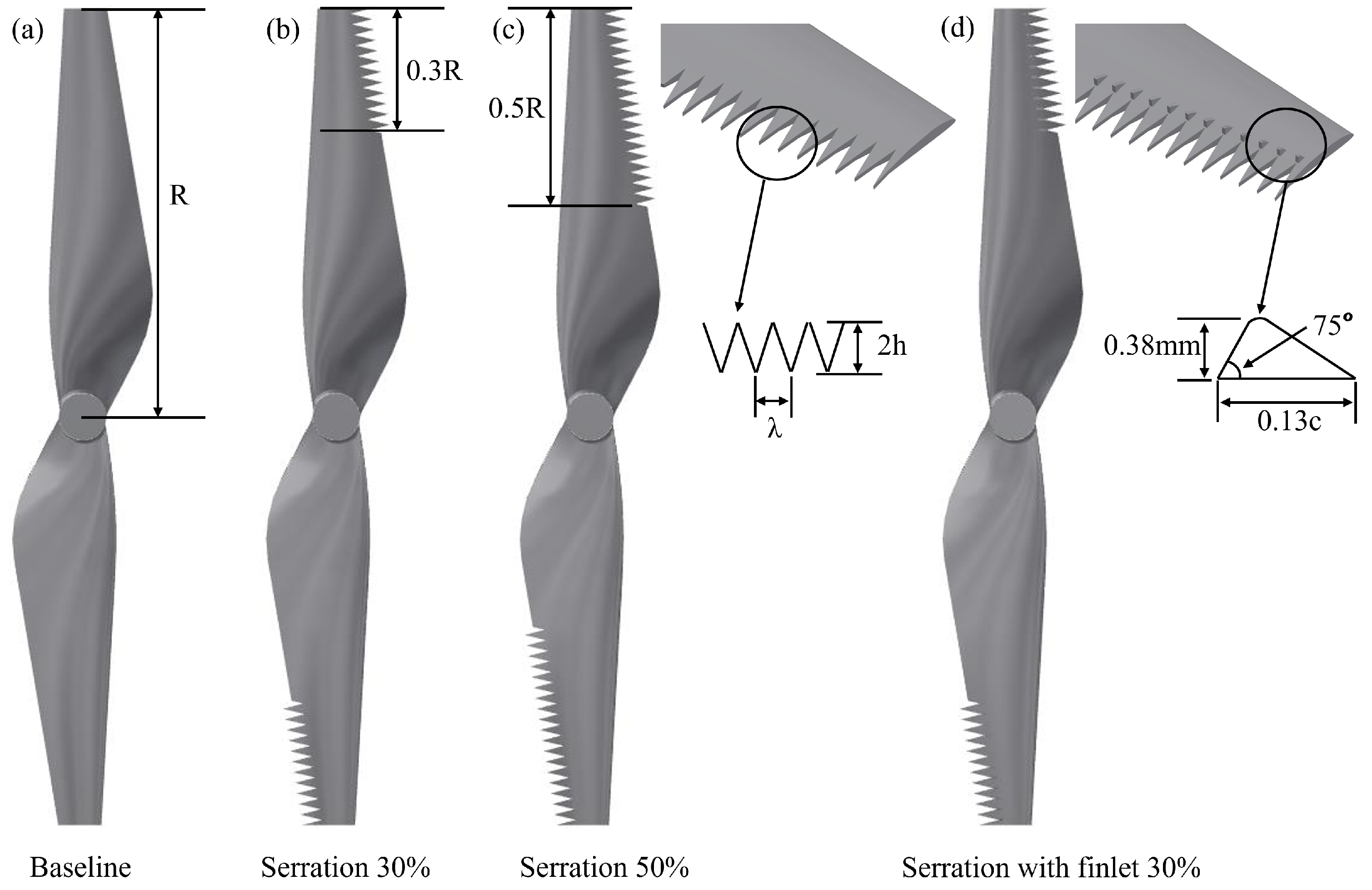
Figure 2.
CAD model for the baseline, serration-only, and serration–finlet blades: (a) Baseline case. (b) Serration . (c) Serration and (d) Serration with finlet.
Table 3.
Baseline rotor design parameters.
Inspired by the literature, sawtooth serrations [12,17,20] were applied to the TE of the baseline blade. A serration wavelength-to-amplitude ratio of = 1 was chosen, since the ratio has shown to be effective in mitigating the noise from static aerofoils and rotating blades [13,15,19]. Referencing the serrated blades modified by Ning et al. [17], a serration amplitude of was used, resulting in an amplitude of approximately 1 mm. Furthermore, this selection allowed for blade manufacturing from an in-house SLA printing method. Moreover, the serrations were cut out from the trailing edge so that planform surface area of blade was conserved compared to the baseline, i.e., materials were both added and removed from the baseline planform to shape the serrations. This allowed for the identification of any changes in aerodynamic performance solely due to the serrations. With these serration design parameters, two configurations were made, namely, the ‘Serration ’ and ‘Serration ’, wherein the serrations were applied to the outboard and of the blades, respectively, as illustrated in Figure 2b,c.
The introduction of finlets near the TE of the blade in combination with the serrations has shown promising ability to further suppress aerofoil noise. Therefore, a further modification was carried out by combining the trailing-edge serrations with the finlets—referred to in the present study as ‘Serration–finlet ’. The indicates that the modification was applied to of the blade, similar to the ‘Serration ’ configuration. The geometric parameters of the finlets were based off the work by Shi and Kollman [20]. Due to manufacturing limitations, a minimum finlet height of 0.38 mm was employed, and the finlet angle near the TE was kept constant at (see Figure 2d). The length of finlet was set at , meaning that the shape of the finlet varied along the span of the rotor blades with the chord length (c). Furthermore, the finlets were aligned with the trough of each serration at of the local chord, i.e., the trailing edge of finlets approximately coincided with that of the blade. A close-up view of the configuration showing the finlet geometry is shown in Figure 2d. It is useful to mention that all of the rotor blades in the present work were manufactured using an in-house resin-based stereolithography apparatus (SLA) printer. Gray SLA resin was selected as the printing material, which has a density of 1.2 g/cm3, a tensile strength of 47 MPa, and a flexural strength of 90 MPa.
2.3. Acoustic and Psychoacoustic Post-Processing
The recorded far-field signals were first subjected to the Welch’s function to obtain the power of the acoustic pressure fluctuations () in the frequency domain, and subsequently, the sound pressure level (in dB) of the far-field noise was obtained using the following equation:
where is the frequency resolution from the Welch’s function, and is the reference pressure of Pa. In the present study, the time-series signals were divided into 128 segments with 50% overlap, a Hamming window was applied to each segment, and the frequency resolution was Hz. Subsequently, the overall sound pressure level can be determined by integrating the acoustic pressure fluctuations over a frequency range as follows:
In addition to the noise levels, psychoacoustic analyses were also carried out because these psychoacoustic-related sound quality metrics (SQMs) are considered to perform better than the conventional noise metrics, such as EPNL (effective perceived noise level), when the noise annoyance level to the general population is concerned [28,29]. In recent studies, these SQMs have been shown to capture the annoyance associated with the noise from the aerial vehicles well [21,30,31]. Several sound quality metrics (SQMs) are essential to the evaluate the psychoacoustic annoyance; they are Loudness (N), Sharpness (S), Tonality (T), and the corresponding psychoacosutic annoyance. In the present study, the Sound Quality Analysis Toolbox (SQAT) developed by Greco et al. [32] was used to determine the SQMs. Here, a brief description of each metric is discussed, and readers are advised to refer to their work [33,34] for detailed explanations and implementations.
Loudness, measured in sones, provides a measurement of the perceptual scale of the sound. It is evaluated based on the ISO 532-3 loudness model [35]. Sharpness, having a unit of acum, highlights the perceived imbalance of the noise signature toward high-frequency regions. Sharpness is obtained by introducing a frequency weighting to the loudness and follows the DIN standard [36]. Tonality, measured in units of T.U., identifies salient tones over the frequency range, providing a direct quantification of the prominence of the tones [37]. Di et al. [22] proposed an improvement to the psychoacoustic model first developed by Zwicker and Fastl [38], which takes into account of the Loudness, Sharpness, Tonality, Fluctuation Strength, and Roughness of the noise. They formulated the psychoacoustic annoyance (PA) as follows:
where is the Loudness in sones at the 5th percentile, and , , and are coefficients describing the effects of Sharpness, Fluctuation Strength, and Roughness, as well as Tonality, respectively. Fluctuation Strength, measured in vacil units, measures the perception of slower modulations occurring at very low frequencies, up to about 20 Hz, while Roughness, measured in asper units, quantifies rapid acoustic modulation within the frequency range between 15 Hz and 300 Hz. Since both SQMs concern noise modulations notably below the blade passing frequency, these two SQMs are considered less significant in contributing to the psychoacoustic annoyance for the present drone operations. Therefore, Loudness, Sharpness, Tonality, and the corresponding psychoacoustic annoyance based on the work of Di et al. [22] were analyzed and presented to assess the psychoacoustic and social impact of mitigating the drone noise with modified rotor blades.
3. Results and Discussion
3.1. Far-Field Acoustic Characteristics in Hover and Forward Flight Conditions
To better understand the effect of noise mitigation, it is useful to have firsthand knowledge of the far-field acoustic characteristics of the quadcopter. Figure 3 shows the far-field acoustic spectra for the hover condition, at three observer locations of , , and from each microphone array. Recall that in both hover and forward flights, the observer location is aligned with the center of the drone (see Figure 1), and therefore, the selected observer locations are representative of the changes in the acoustic spectra due to directivity. The background noise, not shown here for the sake of brevity, had little contribution to the spectra, as the background noise level from the quiet chamber was consistently more than 10 dB below that of the quadcopter over the frequency range of interest. It is also useful to highlight that to ensure reliability of the measured results, all hover and forward flights were operated autonomously using the VPS control program such that the maneuver of the drone was kept consistent at a given flight condition. Moreover, at each flight condition, the measurement was repeated three times. It was found that the measured level of noise differed no more than 0.5 dB between all three runs.
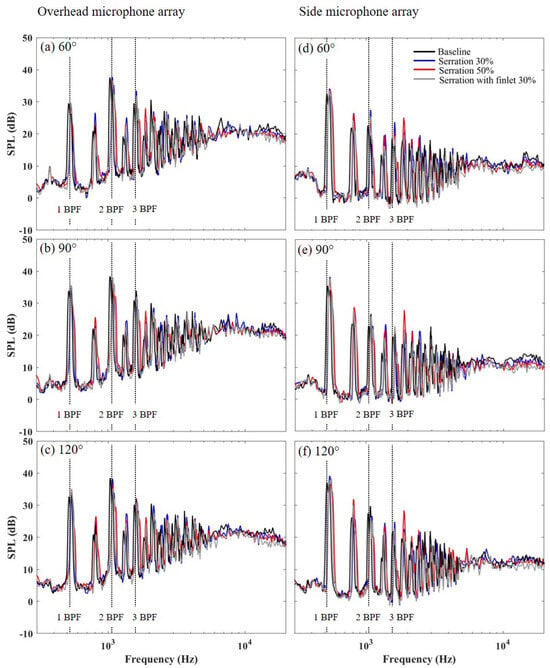
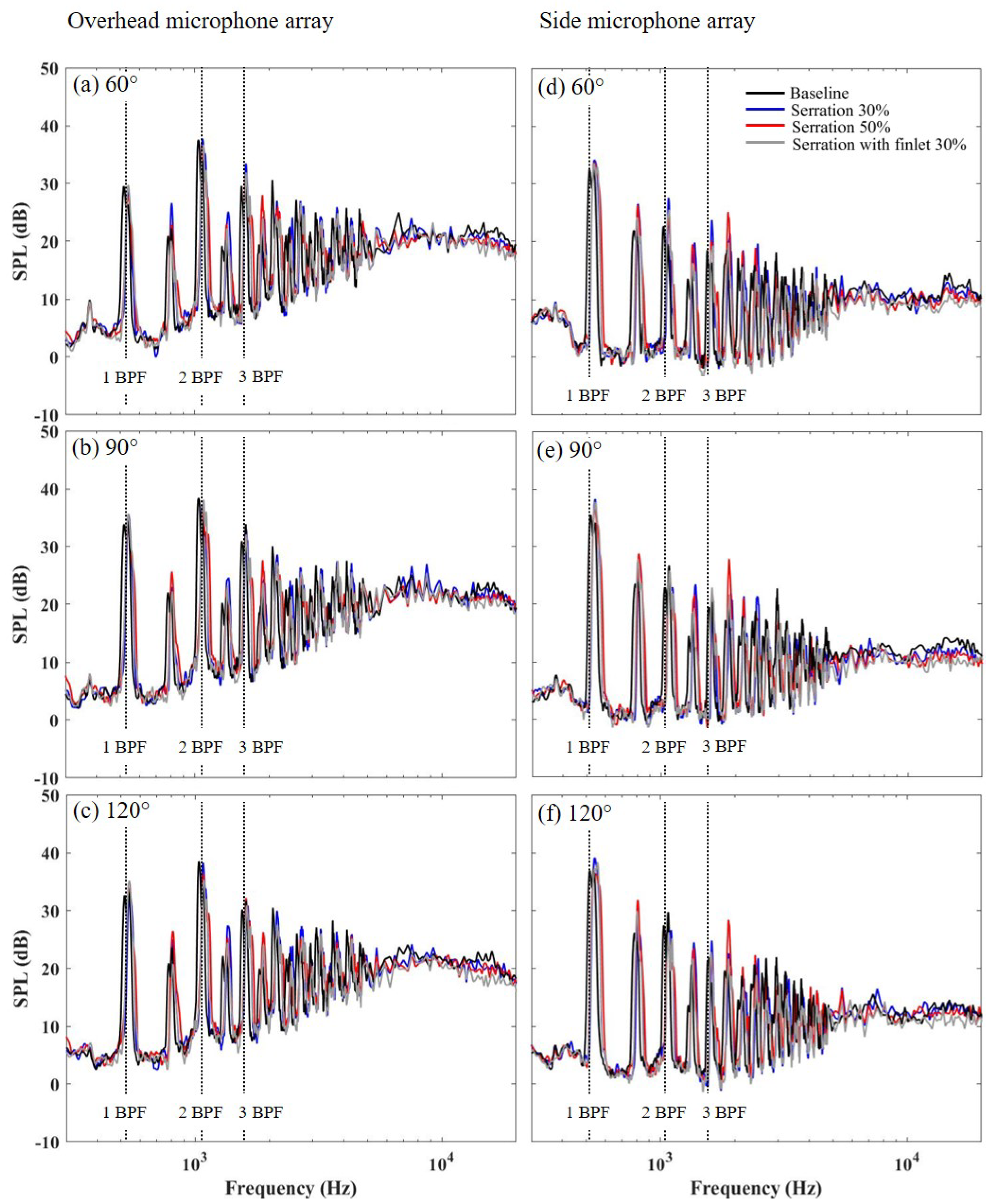
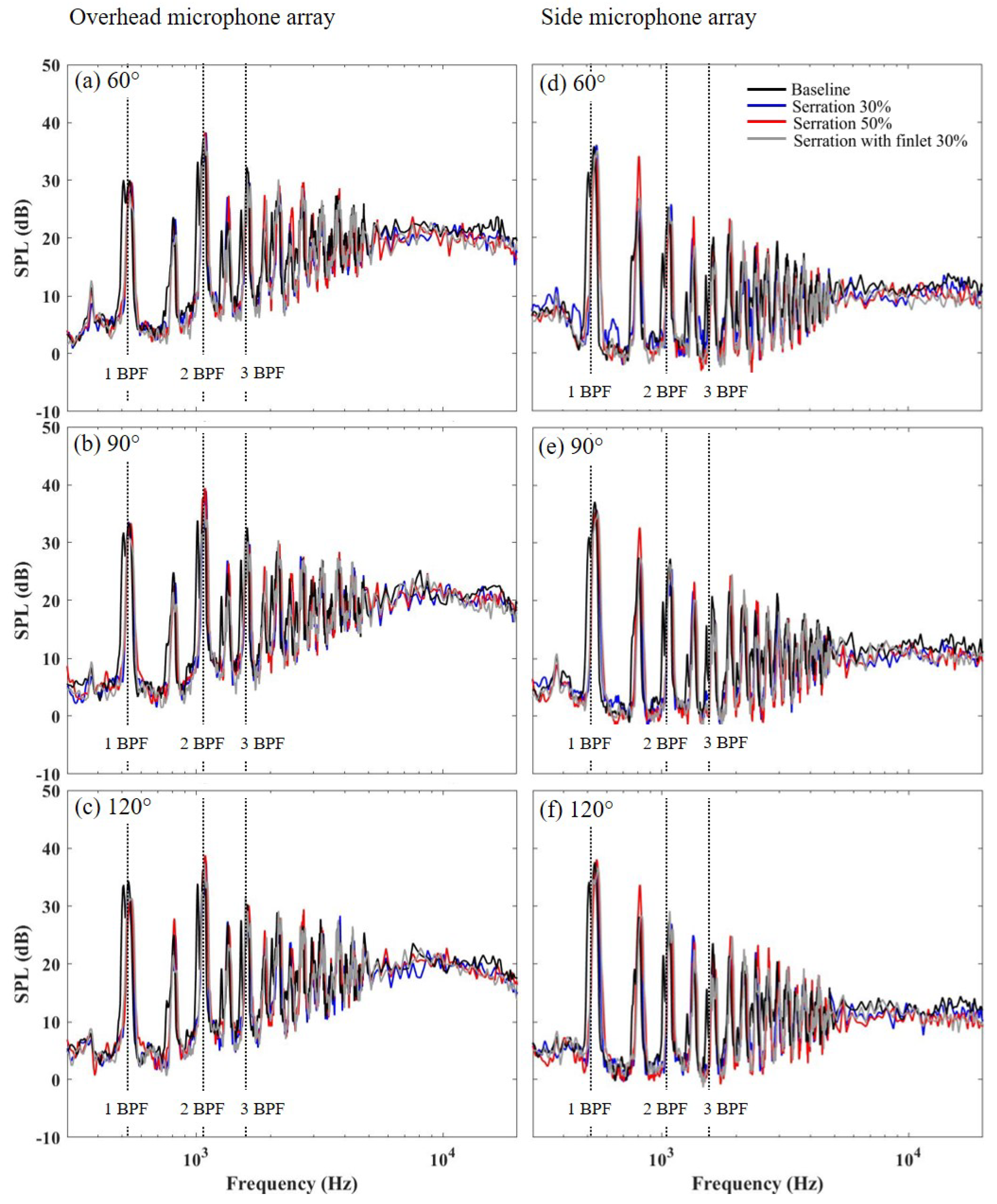
Figure 3.
Far-field acoustic spectra of the drone at hover flight using the baseline, serration-only, and serration–finlet blade designs, measured from the overhead microphone array (left column) at = 60°, 90°, and 120° (a–c) and the side microphone array (right column) at 60°, 90°, and 120° (d–f).
Examining first the acoustic spectra in hover condition, seen in Figure 3, the spectra consist of prominent tonal peaks at the fundamental BPF and its integer multiples, up to 8 × BPF. The fundamental BPF of the quadcopter is approximately 540 Hz, very close to the 533 Hz expected from the nominal hover RPM, suggesting that the aerodynamic performance of the rotor blades is comparable to that of the default ones. The fundamental BPF is directly related to steady loading, whereas the higher harmonics are associated with both steady and unsteady loading as well as blade–vortex interactions [39,40,41]. Therefore, the significant higher harmonics of the BPF from the quadcopter could be an indication of the flow unsteadiness from rotor–rotor and rotor–airframe interactions, which are inherent to the quadcopter configuration in hover. Tonal component is dominant in the low-to-mid frequencies. On the other hand, when observing the high frequencies of the spectra, the broadband component becomes clearly visible at Hz. In addition, a notable broadband hump can be observed, peaking around Hz. This held true for the observer locations from both the overhead and side microphone arrays, although the magnitude of the broadband noise was significantly lower for the latter.
When trailing-edge serrations and serration–finlets configurations were applied to the rotor blades, the general shape of the far-field acoustic spectra remained similar to that of the baseline. A closer comparison between the baseline and serrated blades reveals that there exist minor differences in the BPFs between the baseline and serrated blades. Table 4 summarizes the differences in the BPFs for the different blade designs compared to the baseline and, hence, the differences in the RPMs that the quadcopter operates during hover. The RPM increased by a maximum of 2.2% for both the blades only with serrations. Since the thrust generated by the rotors is balanced with the its own weight in hover, it can be assumed that the thrust produced by the rotor blades are the same for the different blades. Given that the thrust is directly proportional to the rotational speed [42], the slight increase in the rotational speed would mean that the serration and serration–finlet blades require slightly higher rotational speed to achieve a similar thrust, thus suggesting that their efficiency would also drop. However, it is expected that the change is sufficiently small and is unlikely to affect the operational capability of the vehicle. This agrees well with the observation that there are very limited differences in the tonal components between the different blade designs, as seen in Figure 3. Nevertheless, some noticeable reductions in the broadband noise component can be observed in the mid-to-high frequencies at Hz. This is expected, since both the finlets and serrations are designed to reduce trailing-edge noise in mid-to-high frequency range [20,43].
Table 4.
Comparison of the RPMs in hover flight for different blade designs.
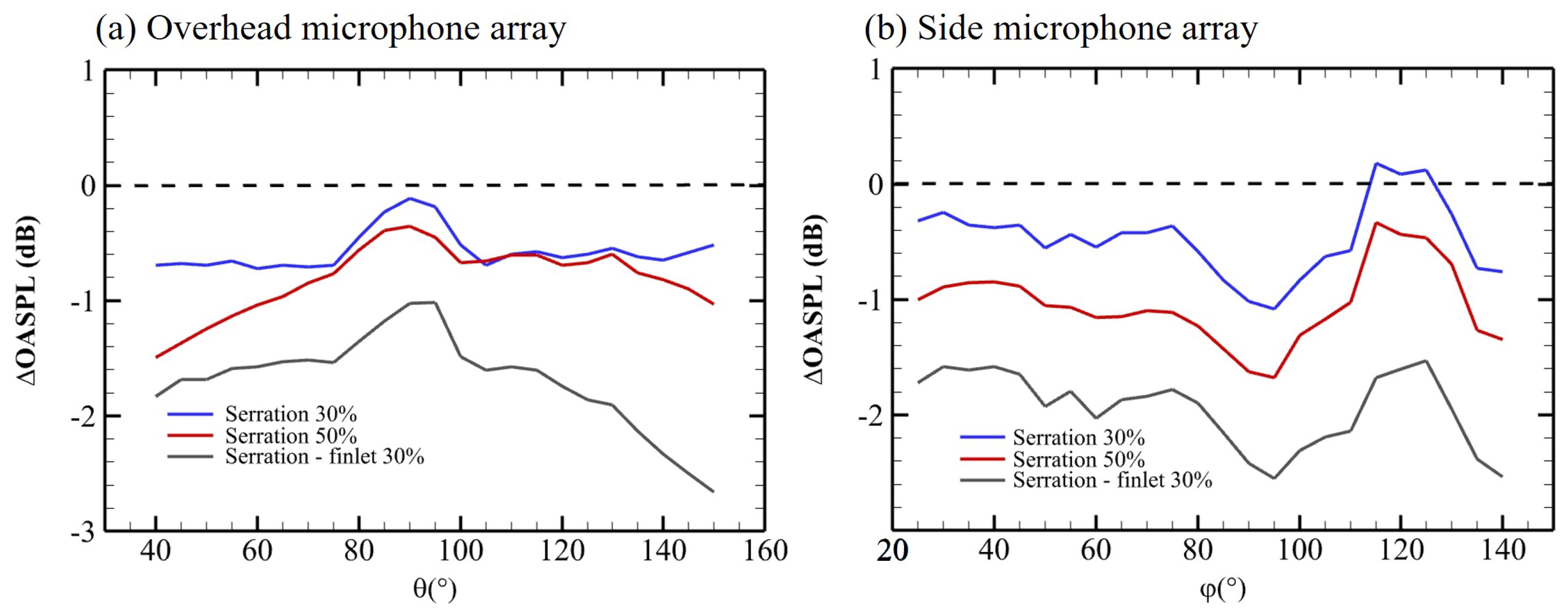
To better quantify the extent of noise reduction at mid-to-high frequencies from the serrated blades, Figure 4 shows of all three modified blades. In Figure 4a, the ‘Serrations ’, ‘Serration ’ and ‘Serration–finlet ’ are compared to the ‘Baseline’ at observer locations from the overhead microphone array, while in Figure 4b, they are compared at observer locations from the side microphone arrays. Here, the OASPL was calculated using Equation (2) with Hz and = 20,000 Hz, and the differences were computed by , where and are the OASPL of the modified blades (e.g., serration-only and serration–finlet) and of the baseline blades, respectively. Hence, a negative difference value highlights the reduction in the far-field noise level at Hz. Clearly, all three modifications are beneficial to mitigating the quadcopter noise, up to approximately 2.8 dB in magnitude. Among them, the ‘Serration–finlet’ design achieved the most significant and consistent reduction across all observer locations, followed by ‘Serration 50%’ and ‘Serration 30%’. Furthermore, similar levels of noise reduction can be observed for the observer locations from the side array. This suggests that both the serration and serration–finlet modifications carry an overall mitigation effect on the broadband component that is not directional.
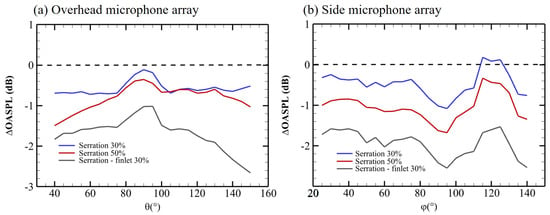
Figure 4.
Differences in overall sound pressure level, , at mid-to-high frequencies between the baseline, serration-only, and serration–finlet blade designs measured from (a) the overhead microphone array and (b) the side microphone array for hover flight.
Figure 5 shows the far-field acoustic spectra in forward flight at observer locations from the overhead and side microphone arrays identical to the hover flight shown in Figure 3. It should be mentioned that no distance correction was applied to the acoustic signals even though the quadcopter was moving, as detailed in Section 2. This is because in the present study, the forward flight maneuver is programmed to be consistent throughout the test for the different blade designs. As a result, it is sufficient to identify any reduction in the far-field acoustics in the forward flight from the present microphone array setup. It can be observed that the primary characteristics of the acoustic spectra are very similar to those observed in hover flight. Firstly, multiple tonal peaks at the BPF and its integer harmonics are prominent in the low-to-mid frequencies up to Hz. Secondly, broadband noise becomes the dominant source of noise at Hz. The most noticeable difference between the hover and forward flights lies in the tonal peaks of the BPF and its first harmonic (2 × BPF), where in forward flight, a clearer ‘dual-peak’ shape appears. This is attributed to the forward maneuver, which requires the front pair of blades (i.e., with respect to the direction of motion) operating at an RPM slightly different from the rear pair.
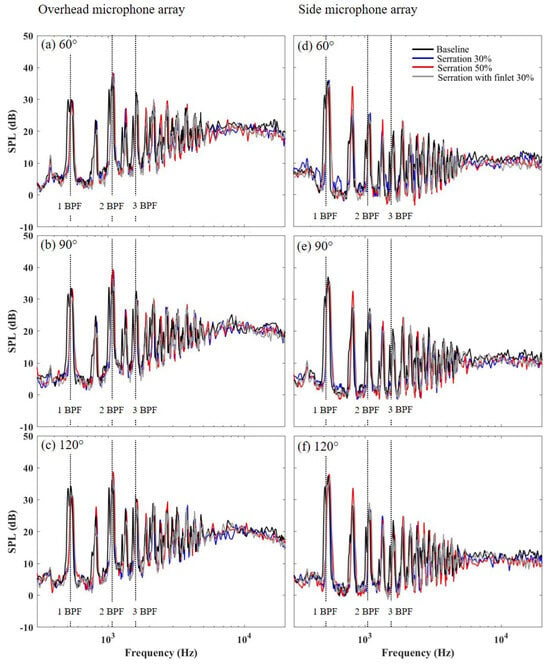
Figure 5.
Far-field acoustic spectra of the drone at forward flight using the baseline, serration-only, and serration–finlet blade designs measured from the overhead microphone array (left column) at = 60°, 90°, and 120° (a–c) and the side microphone array (right column) at 60°, 90°, and 120° (d–f).
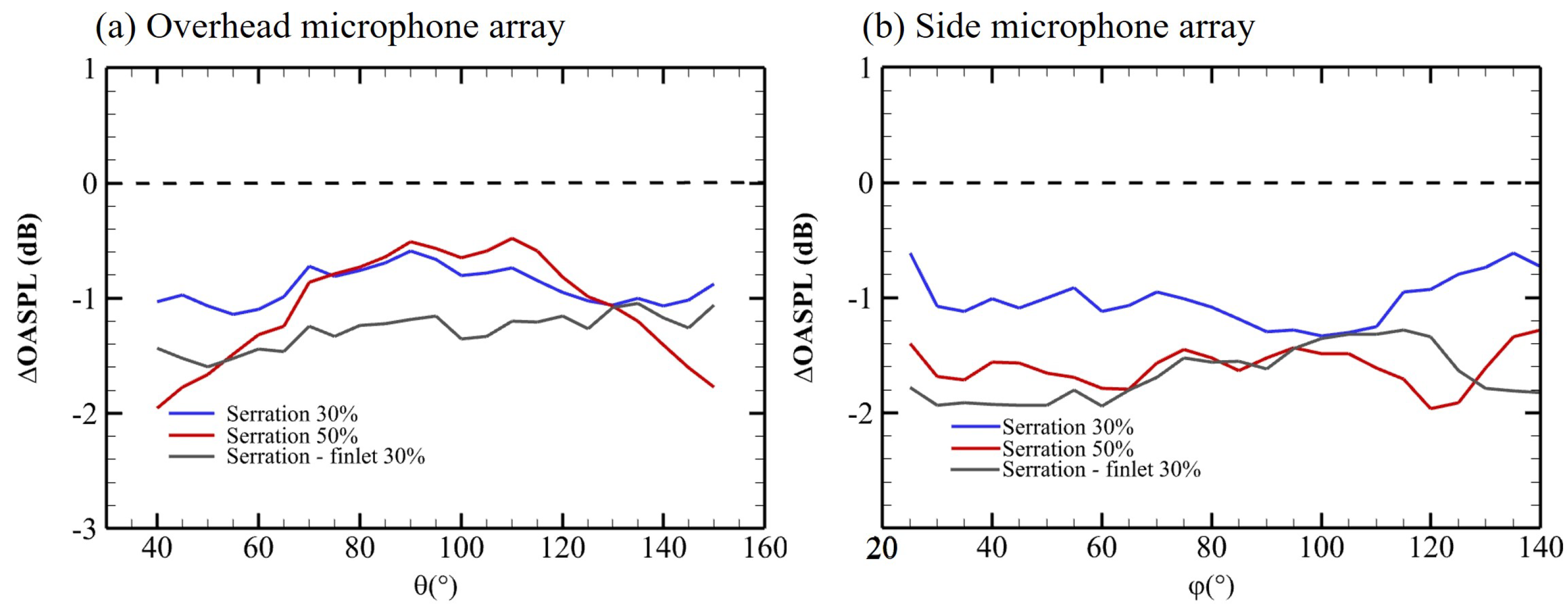
The serration and serration–finlet modified blades are still expected to act effectively, which is corroborated by the results shown in Figure 6. As seen in Figure 6, relatively consistent reductions of 1–1.5 dB were achieved by all three modified blades at observer locations from the overhead array. Even though the serration–finlet modification remained the most effective, similar to the hover flight case, its margin with reference to the serrations narrowed. More importantly, the ‘Serration ’ appears to again outperform the ‘Serration ’, particularly at the shallower observer locations ( and ) from the overhead array. At observer locations from the side array, the reduction was relatively constant, and yet, the trend is largely comparable to those from the overhead array. Hence, care is taken not to draw any significant conclusion on the effect of noise mitigation along these observer locations.
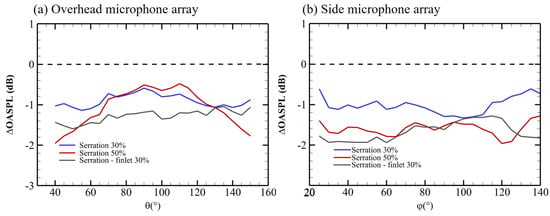
Figure 6.
Differences in overall sound pressure level, , at mid-to-high frequencies between the baseline, serration-only, and serration–finlet blade designs measured from (a) the overhead microphone array and (b) the side microphone array for forward flight.
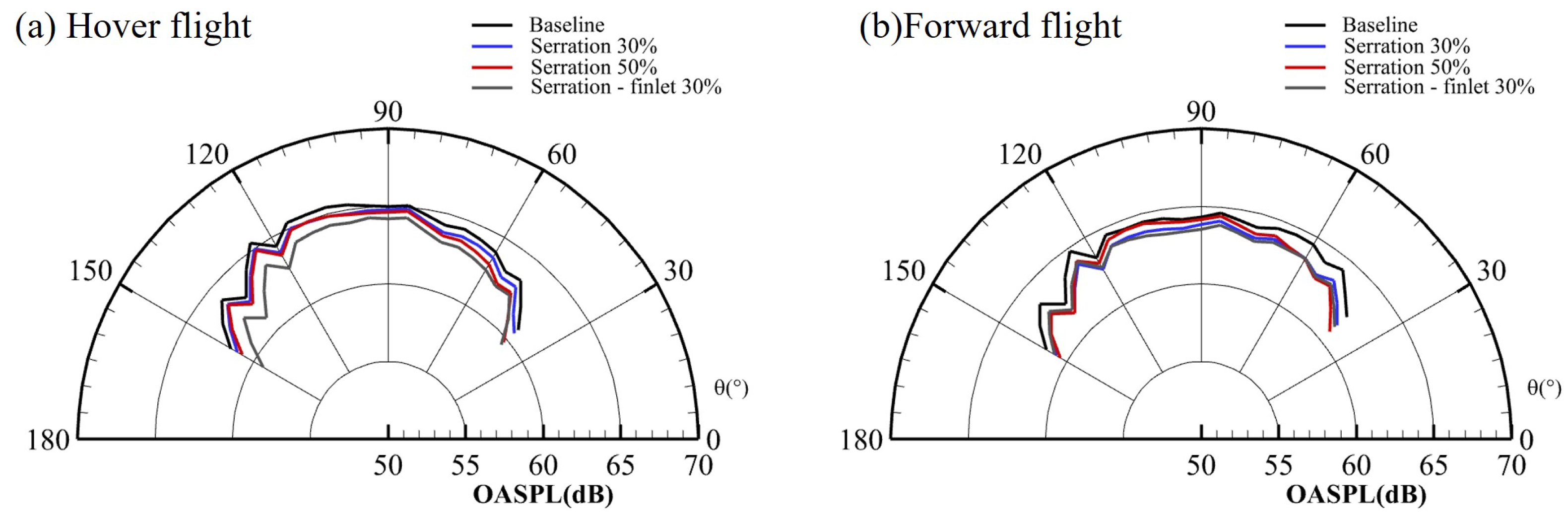
Lastly, Figure 7 shows the OASPL directivity of the quadcopter at observer locations from the overhead array for the hover and forward flight conditions, respectively. Note that the results from the side array are not shown here for the sake of brevity, since they are similar to those from the overhead array. Also, it is useful to mention that the OASPL is integrated over a frequency range of 300 Hz ≤ f ≤ 20,000 Hz, meaning that it includes both tonal and broadband components. The amplitude of the OASPL hovered around 65 dB, indicating that the drone noise is clearly audible when it is approximately 2 m away. Importantly, the serration and serration–finlet modifications did not alter the directivity pattern in both the hover and forward flights. Therefore, its noise mitigation effect can be observed in all the observer locations, despite the fact that the magnitude of the reduction differs. Moreover, it further confirms that the serrations and serration–finlet, which mainly affect the broadband component in the mid-to-high frequencies, can yield a notable reduction even when the OASPL over the entire range of frequency is considered.
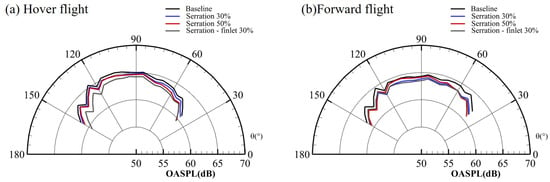
Figure 7.
Overall sound pressure level of the far-field noise for the drone at hover flight using the baseline, serrated-only, and serrated–finlet propeller designs measured from (a) the overhead microphone array and (b) the side microphone array.
3.2. Psychoacoustic Annoyance Analysis for Different Rotor Blades
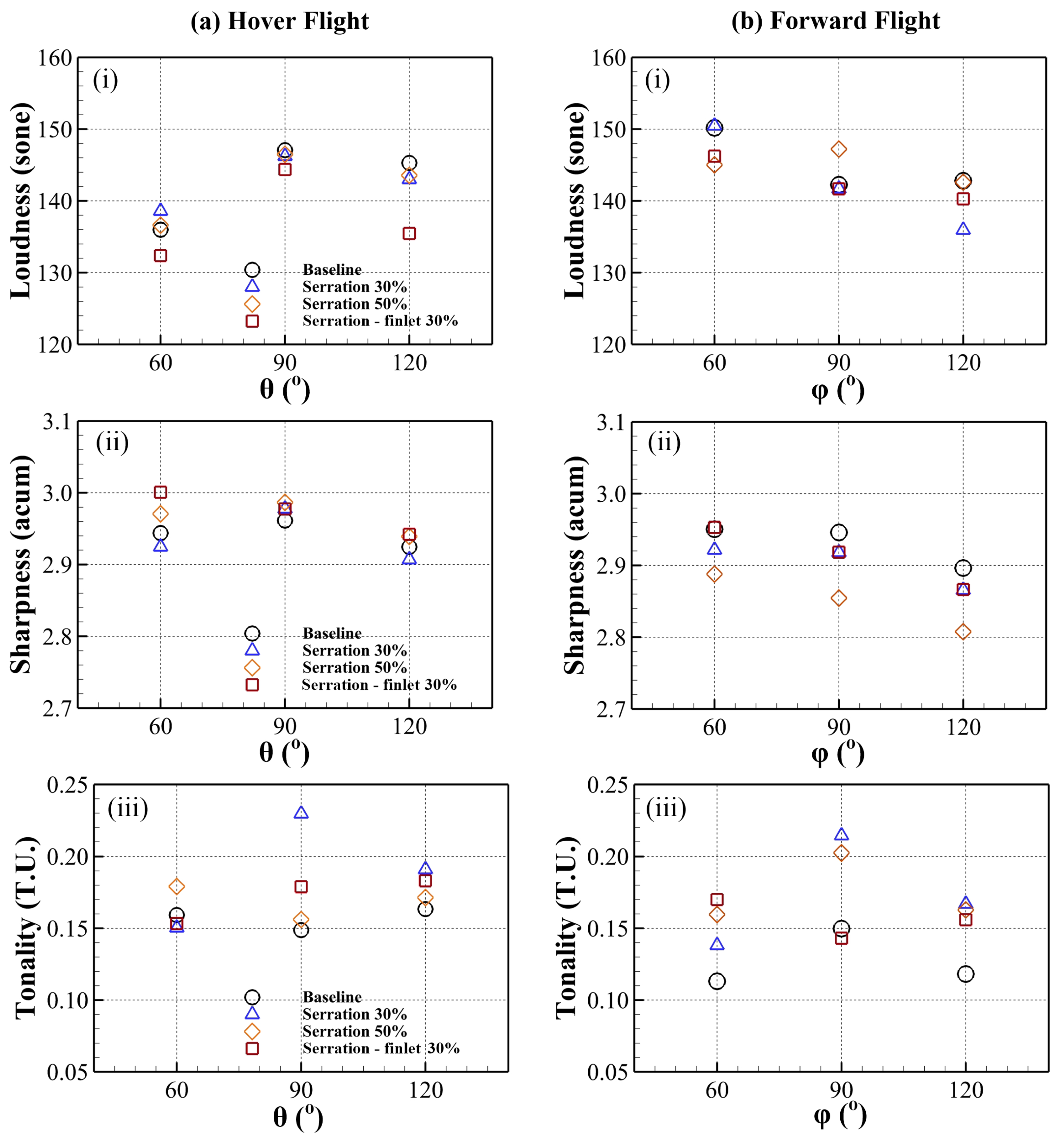
Torija et al. [23] suggested that to better understand the psychoacoustic annoyance from rotor-driven vehicles, such as drones, it is critical to consider the related SQMs. In the present study, three major SQMs, namely, Loudness, Sharpness, and Tonality, were evaluated and examined. Metrics such as Roughness and Fluctuating Strength have been omitted, since these metrics primarily concern the low frequencies that are not the focus of the study. Figure 8 shows the comparison of the Loudness, Sharpness, and Tonality between the baseline and modified blades for both the hover and forward flights. For consistency and ease of understanding, results from the same observer locations of = 60°, 90°, and as the acoustic spectra presented earlier, such as in Figure 3, are analyzed and shown.
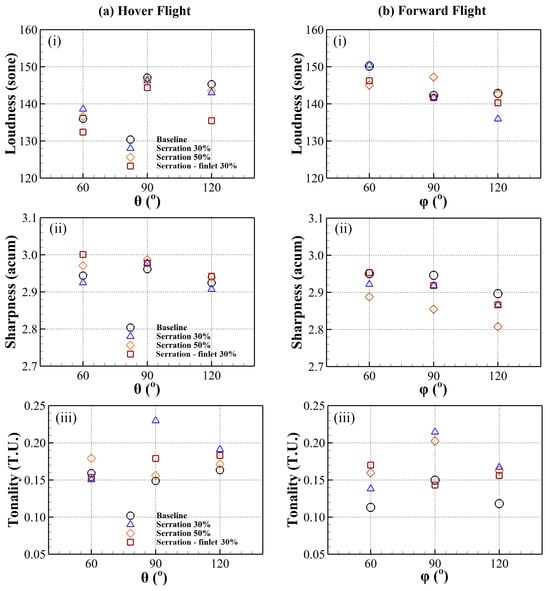
Figure 8.
Sound quality metrics of (i) Loudness (ISO 532-3 [35]), (ii) Sharpness (DIN standard [36]), and (iii) Tonality (based on Aures weighting [37]) analyzed from the far-field acoustic signal for the drone at (a) hover flight and (b) forward flight using the baseline, serration-only, and serration–finlet blade designs. Three observer locations of 60°, 90°, and 120° are selected from the overhead microphone array to correspond to the acoustic spectra result in Figure 3 and Figure 5.
First, examining the Loudness indicator in both the hover and forward flights shown in Figure 8a(i),b(i), the ‘Baseline’ blades yielded the highest loudness level (sone) in general. However, two exceptions can be seen at the observer locations of in the hover flight and in the forward flight. For the former, the ‘Serration ’ blades produced the highest loudness level, whereas for the latter, ‘Serration ’ blades gave rise to the highest level. This suggests that the Loudness of the ‘Serration ’ and ‘Serration ’ blades remains very close to that of the ‘Baseline’. On the other hand, the ‘Serration–finlet’ blades produced consistently lower loudness, which agrees well with results of the seen in Figure 4 and Figure 6.
Second, when the Sharpness indicator is considered, there are clear differences between the hover and forward flights, as shown in Figure 8a(ii),b(ii). In the hover flight, no clear trend can be observed between the baseline and modified blades, whereas in the forward flight, the quadcopter with the ‘Baseline’ blades demonstrated the highest level for the Sharpness indicator (acum). Interestingly, the ‘Serration ’ blades gave rise to the lowest level for the Sharpness indicator, meaning that implementing serrations to a greater proportion of the blades can potentially mitigate the perceived noise imbalance in the high frequency region.
Third, taking a closer look at the Tonality indicator, it is evident that the tonal components from the modified blades are generally more accentuated, which are also in agreement with the acoustic spectra results shown earlier (see Figure 3 and Figure 5) that the serration and serration–finlet modifications did not notably alter the BPF and its higher-order harmonics.
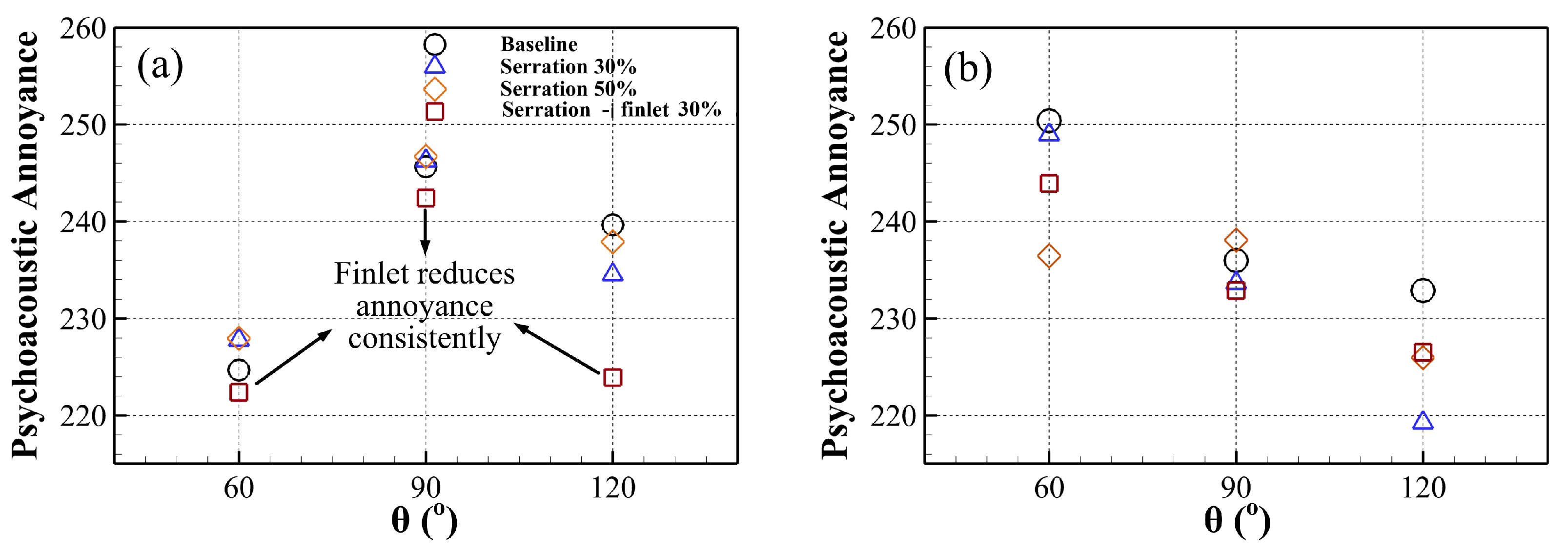
The psychoacoustic annoyance (PA) was subsequently determined from these SQMs using Equation (3). Figure 9 shows the PA calculated at the same observer locations for both the hover and forward flights. Two important observations can be made from the results. Firstly, though the annoyance levels are comparable between the hover and forward flights, their so-called ‘directivity’ values are distinct. In the hover flight, the PA level reached the highest at , while in the forward flight, the highest level was detected at , suggesting that the noise was directed toward the direction of motion for the latter. This can partly be attributed to the maneuver of the quadcopter, since when the quadcopter moves forward, it tilts slightly to enable forward-thrust generation, and thus, its noise from the rotor is directed more toward the shallower observer angles in front, i.e., in the direction of motion. Secondly, despite the fact that some noise reduction can be seen from the ‘Serration ’ and ‘Serration ’ blades, as shown in the results earlier, their respective PA levels are not necessarily lower than those of the ‘Baseline’. Nevertheless, the ‘Serration–finlet’ blades outperformed the other modified blades, producing consistently lower PA levels than the ‘Baseline’. This reinforces the noise mitigation benefit that a combined serration–finlet modification brings to the quadcopter rotor.
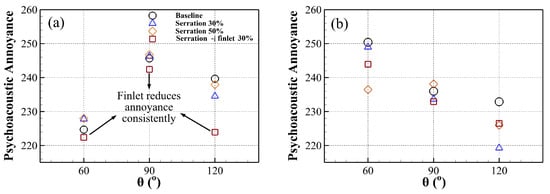
Figure 9.
Psychoacoustic annoyance from the drone noise taking into account of the contribution from all the sound quality metrics for (a) hover flight and (b) forward flight. Three observer angles of 60°, 90°, and 120° are selected from the top microphone array, similar to Figure 8, and the annoyance is calculated based on the psychoacoustic model in [22].
Based on the formula of the psychoacoustic annoyance in Equation (3), the Loudness indicator contributes primarily to the annoyance level, and yet, other indicators can add to the levels, leading to some extent of variation in the PA level. Thus, it is also interesting to briefly explore the correlation of Loudness, Sharpness, and Tonality with the psychoacoustic annoyance, particularly at the presently investigated observer locations. Using Spearman’s approach [44], the correlation coefficients between each SQM and the PA have been determined and summarized in Table 5 and Table 6 for the hover and forward flights, respectively. Not surprisingly, the PA and Loudness are highly correlated in both scenarios. Nevertheless, a clear difference can be observed between the hover and forward flights. The Sharpness indicator is more correlated with the PA for the former, and more significant correlation between the two comes from Tonality for the latter, which indicates that the contribution of the other indicators to the psychoacoustic annoyance may differ in different operating modes. Since psychoacoustic annoyance has shown to be positively correlated to the perceived noise annoyance from the listening test for rotor noise [22,23,45], the present psychoacoustic analysis indicates that noise mitigation using blade modifications can indeed reduce the annoyance levels of the drones, as perceived by people in the community.
Table 5.
The correlation, calculated based on Spearman’s method [44], between psychoacoustic annoyance and the sound quality metrics of Loudness, Sharpness, and Tonality in hover flight.
Table 6.
The correlation, calculated based on Spearman’s method [44], between psychoacoustic annoyance and the sound quality metrics of Loudness, Sharpness, and Tonality in forward flight.
3.3. Brief Discussion on Social Impact
The integration of drone technology into urban ecosystems has demonstrated significant social and economic advantages, such as accelerating logistics delivery and enhancing public surveillance [46]. But it has also triggered emerging environmental challenges, including noise pollution, which has a substantial negative impact on the quality of life for urban residents [47]. Specifically, the unique characteristics of the sound produced by drone operation, including its Loudness, Sharpness, and Tonality profiles, are directly linked with the psychological stress responses of the residents in the community. In light of this, feasible and effective noise mitigation strategies have a profound positive impact on enhancing quality of life and promoting social harmony. In the work of Torija and Clark [21] and Torija and Nicholls [23], they recommended that regulatory policies take into account of the psychoacoustic annoyance indicators, in addition to the A-weighted sound power level. Since the dependence of psychoacoustic annoyance on operating conditions of the drone flights differs from that of the sound power level, using the psychoacoustic indicators as a threshold will allow the community to better mitigate the impact of potential noise pollution from drones. Referring back to the present work, Table 7 summarizes the important findings from the present measurements, including the average reduction of the overall sound pressure level from the trailing-edge serrated blades as well as the average reduction of the psychoacoustic annoyance level in the hover and forward flights. The results clearly demonstrate that the ‘Serration–finlet ’ blades achieve the greatest level of far-field noise reduction on average, which also effectively translates to reduction in psychoacoustic annoyance perceived by people. This suggests that the serration–finlet modifications can be a potentially viable noise reduction technique for drones so that they can better adhere to regulations and more importantly reduce the impact of drone noise pollution.
Table 7.
Summary of the primary findings from the present study, showing the average reduction of far-field noise and psychoacoustic annoyance by the serrated blades.
Upon further analysis, the innovation of drone noise reduction technology is not only a positive response to social needs, but it is also an important engine driving the transformation and upgrading of related industries [46]. Manufacturers will have to increase their investment in technological research and product optimization to meet increasingly stringent noise reduction standards. At the same time, the widespread application of noise reduction technology will create new market demand space, spawn innovative industrial models, and provide new sources of sustained growth for urban economies. Furthermore, the successful implementation of these technological innovations plays an essential role in shaping the tech image of a city. A low-noise, high-tech urban environment is a key factor in attracting talent and promoting investment activities [48]. As a symbolic result of modern technological development for instance, the development of low-noise drones not only showcases the technological strength of the city but also directly promotes the dissemination of the positive tech image of the city. However, the development of drone noise reduction technology requires more research efforts to ensure efficacy and implementations, and moreover, such research is needed to consider it within a multi-dimensional framework bringing together technical feasibility, economic rationality, and regulatory policies so that it can have a real impact on the society.
4. Conclusions
In recent years, drones have become an integral part of transportation and social mobility in our community. However, the growing applications of drones come with inherent socio-economic impacts. In particular, the noise emitted from drones can negatively affect the health of the population. To this end, it is crucial to develop necessary noise mitigation strategies which not only will ameliorate the impact on public health but also further promote the public and regulatory acceptance to drones. The current study presents an experimental investigation of drone noise in both hover and forward flight conditions in a controlled laboratory environment. By introducing serrations and serration–finlet modifications to the rotor blades, the noise characteristics and effect of noise mitigation are carefully examined for a quadcopter. The far-field acoustic pressure signals are captured by two polar microphone arrays for both the far-field acoustic spectra and directivity.
The results show that serrations and serration–finlets can yield a noticeable reduction in the broadband noise level at mid-to-high frequencies. The serration–finlet outperforms the baseline and serration-only blades with a consistent reduction of 1.5–2 dB. Moreover, the modification does not significantly alter the directivity of the drone noise, suggesting that the blade modifications will not produce any additional, undesirable concerns. Psychoacoustic sound quality metrics, such as Loudness, Sharpness, and Tonality, were analyzed as indicators of the psychoacoustic impact of the drone noise. Using these indicators, the psychoacoustic annoyance was evaluated. The analysis shows that in general, the modifications to the rotor blades bring a positive effect. Moreover, when the combined sound quality metrics are considered, i.e., the estimated psychoacoustic annoyance, the serration–finlet blades exhibit a consistent and significant attenuation to the psychoacoustic annoyance level. This corroborates the acoustic results, and more importantly, such technology can provide benefits to the reduction of psychoacoustic impact on the community. This will allow policymakers to establish a regulatory framework for drones, which promotes further deployment of drones and offers potentially greater socio-economic benefits.
It is also useful to highlight the limitations of the present study. Firstly, the measurements were taken without any incoming flow disturbances and therefore were under an ‘ideal scenario’. In real-world applications, the effect of disturbances in the environment on drone noise needs to be further quantified. Secondly, in the experimental campaign, the microphone arrays were fixed in space for the forward flight conditions. Hence, the results represent the time-averaged exposure of a stationary pedestrian to the noise without actually ‘tracking’ the motion of the drone. Therefore, following up from the present work, it will be informative to first introduce incoming disturbances to the drone in order to better mimic the open field conditions. Moreover, several other bio-inspired features are also worth considering, such as cicida wing geometry and the optimal placement of finlets with respect to the trailing edge.
Author Contributions
Conceptualization, Y.B. and B.Z.; Methodology, Y.B., X.L. and B.Z.; Formal analysis, Y.B. and X.L.; Investigation, Y.S.; Writing—original draft, Y.S. and B.Z.; Writing—review & editing, Y.B., X.L. and B.Z.; Supervision, B.Z.; Funding acquisition, Y.S., Y.B. and B.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Social Science Fund of China under the project ‘Innovation in Theoretical Research on Social Governance and Law System in Internet Era’ (Grant No. 20&ZD199) and Nanyang Technological University under Nanyang Scholarship (CN-Yang Scholars Programme).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author, Y.S., upon reasonable request.
Acknowledgments
The authors would like to acknowledge the support from the Wind Tunnel Facility Group at University of Bristol for facility access.
Conflicts of Interest
The authors declare no known conflicts of interest in the current work.
References
- Elsayed, M.; Mohamed, M. The impact of airspace regulations on unmanned aerial vehicles in last-mile operation. Transp. Res. Part D Transp. Environ. 2020, 87, 102480. [Google Scholar] [CrossRef]
- Ramos-Romero, C.; Green, N.; Roberts, S.; Clark, C.; Torija, A.J. Requirements for drone operations to minimise community noise impact. Int. J. Environ. Res. Public Health 2022, 19, 9299. [Google Scholar] [CrossRef]
- Passchier-Vermeer, W.; Passchier, W.F. Noise exposure and public health. Environ. Health Perspect. 2000, 108, 123–131. [Google Scholar] [PubMed]
- Münzel, T.; Sørensen, M.; Daiber, A. Transportation noise pollution and cardiovascular disease. Nat. Rev. Cardiol. 2021, 18, 619–636. [Google Scholar] [CrossRef] [PubMed]
- Çetin, E.; Cano, A.; Deransy, R.; Tres, S.; Barrado, C. Implementing mitigations for improving societal acceptance of urban air mobility. Drones 2022, 6, 28. [Google Scholar] [CrossRef]
- Doolan, C.; Yauwenas, Y.; Moreau, D. Drone propeller noise under static and steady inflow conditions. In Flinovia—Flow Induced Noise and Vibration Issues and Aspects-III; Springer: Cham, Switzerland, 2019; pp. 45–60. [Google Scholar]
- Zawodny, N.S.; Christian, A.; Cabell, R. A summary of NASA research exploring the acoustics of small unmanned aerial systems. In Proceedings of the AHS Technical Meeting on Aeromechanics Design for Transformative Vertical Flight, San Francisco, CA, USA, 16–19 January 2018. Report Number: NF1676L-27827. [Google Scholar]
- Cabell, R.; Grosveld, F.; McSwain, R. Measured noise from small unmanned aerial vehicles. In Proceedings of the Inter-Noise and Noise-Con Congress and Conference Proceedings, Providence, RI, USA, 13–15 June 2016; Volume 252, pp. 345–354. [Google Scholar]
- Zhang, Y.; Lee, I.; Lin, D. Measurement of noise from a moving drone using a phased array microphone system. In Proceedings of the 2017 Asia-Pacific International Symposium on Aerospace Technology, Seoul, Republic of Korea, 3–9 June 2017; pp. 16–18. [Google Scholar]
- Zawodny, N.; Pettingill, N. Acoustic wind tunnel measurements of a quadcopter in hover and forward flight conditions. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Chicago, IL, USA, 26–29 August 2018; Volume 258, pp. 487–500. [Google Scholar]
- Zhou, T.; Jiang, H.; Huang, B. Quad-copter noise measurements under realistic flight conditions. Aerosp. Sci. Technol. 2022, 124, 107542. [Google Scholar] [CrossRef]
- Wei, Z.; Wang, S.; Farris, S.; Chennuri, N.; Wang, N.; Shinsato, S.; Demir, K.; Horii, M.; Gu, G.X. Towards silent and efficient flight by combining bioinspired owl feather serrations with cicada wing geometry. Nat. Commun. 2024, 15, 4337. [Google Scholar] [CrossRef]
- Avallone, F.; Pröbsting, S.; Ragni, D. Three-dimensional flow field over a trailing-edge serration and implications on broadband noise. Phys. Fluids 2016, 28, 117101. [Google Scholar] [CrossRef]
- Liu, X.; Kamliya Jawahar, H.; Azarpeyvand, M.; Theunissen, R. Aerodynamic performance and wake development of airfoils with serrated trailing-edges. AIAA J. 2017, 55, 3669–3680. [Google Scholar] [CrossRef]
- Howe, M.S. Noise produced by a sawtooth trailing edge. J. Acoust. Soc. Am. 1991, 90, 482–487. [Google Scholar] [CrossRef]
- Lyu, B.; Azarpeyvand, M.; Sinayoko, S. Prediction of noise from serrated trailing edges. J. Fluid Mech. 2016, 793, 556–588. [Google Scholar] [CrossRef]
- Ning, Z.; Wlezien, R.W.; Hu, H. An experimental study on small UAV propellers with serrated trailing edges. In Proceedings of the 47th AIAA Fluid Dynamics Conference, Denver, CO, USA, 5–9 June 2017; pp. 2017–3813. [Google Scholar]
- Yang, Y.; Wang, Y.; Liu, Y.; Hu, H.; Li, Z. Noise reduction and aerodynamics of isolated multi-copter rotors with serrated trailing edges during forward flight. J. Sound Vib. 2020, 489, 115688. [Google Scholar] [CrossRef]
- Zang, B.; Hanson, L.P.; Stoltz, A.; Ho, W.H.; Liu, X.; Azarpeyvand, M. Numerical and experimental investigation of propeller noise with trailing-edge serrations. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023; pp. 2023–3835. [Google Scholar]
- Shi, Y.; Kollmann, W. Wall-modeled large-eddy simulation of a trailing-edge serration-finlet configuration. AIP Adv. 2021, 11, 065222. [Google Scholar] [CrossRef]
- Torija, A.J.; Clark, C. A psychoacoustic approach to building knowledge about human response to noise of unmanned aerial vehicles. Int. J. Environ. Res. Public Health 2021, 18, 682. [Google Scholar] [CrossRef]
- Di, G.Q.; Chen, X.W.; Song, K.; Zhou, B.; Pei, C.M. Improvement of Zwicker’s psychoacoustic annoyance model aiming at tonal noises. Appl. Acoust. 2016, 105, 164–170. [Google Scholar] [CrossRef]
- Torija, A.J.; Li, Z.; Chaitanya, P. Psychoacoustic modelling of rotor noise. J. Acoust. Soc. Am. 2022, 151, 1804–1815. [Google Scholar] [CrossRef]
- DJI. Tello User Manual. 2018. Available online: https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20User%20Manual%20v1.4.pdf (accessed on 23 December 2024).
- Glegg, S.; Devenport, W. Aeroacoustics of Low Mach Number Flows: Fundamentals, Analysis, and Measurement; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Gori, Y.; Patil, P.P.; Taluja, R. UAV structure and aerodynamic character research on two different airfoils. Webology 2021, 18, 1418–1428. [Google Scholar]
- Van Treuren, K.; Wisniewski, C. The importance of airfoil selection in the design of UAS propellers. In Proceedings of the Turbo Expo: Power for Land, Sea, and Air, Rotterdam, Rotterdam, The Netherlands, 13–17 June 2022; American Society of Mechanical Engineers: New York, NY, USA, 2022; Volume 85970, p. V001T01A011. [Google Scholar]
- Rizzi, S. Toward reduced aircraft community noise impact via a perception-influenced design approach. In Proceedings of the Inter-Noise Congress and Conference Proceedings, Hamburg, Germany, 21–24 August 2016; Volume 253, pp. 220–244. [Google Scholar]
- Torija, A.J.; Roberts, S.; Woodward, R.; Flindell, I.H.; McKenzie, A.R.; Self, R.H. On the assessment of subjective response to tonal content of contemporary aircraft noise. Appl. Acoust. 2019, 146, 190–203. [Google Scholar] [CrossRef]
- Boucher, M.A.; Krishnamurthy, S.; Christian, A.W.; Rizzi, S.A. Sound quality metric indicators of rotorcraft noise annoyance using multilevel analysis. J. Acoust. Soc. Am. 2023, 153, 867–876. [Google Scholar] [CrossRef]
- Green, N.; Torija, A.J.; Ramos-Romero, C. Perception of noise from unmanned aircraft systems: Efficacy of metrics for indoor and outdoor listener positions. J. Acoust. Soc. Am. 2024, 155, 915–929. [Google Scholar] [CrossRef]
- Greco, G.; Merino-Martinez, R.; Osses, A. SQAT: A Sound Quality Analysis Toolbox for MATLAB (Version v1. 1). 2023. Available online: https://zenodo.org/records/10580337 (accessed on 23 December 2024).
- Greco, G.F.; Merino-Martínez, R.; Osses, A.; Langer, S.C. SQAT: A MATLAB-based toolbox for quantitative sound quality analysis. In Proceedings of the Inter-Noise and Noise-Con Congress and Conference Proceedings, Chiba, Japan, 20–23 August 2023; Volume 268, pp. 7172–7183. [Google Scholar]
- Osses, A.; Greco, G.F.; Merino-Martínez, R. Considerations for the perceptual evaluation of steady-state and time-varying sounds using psychoacoustic metrics. In Proceedings of the Forum Acusticum, Torino, Italy, 11–15 September 2023. [Google Scholar]
- ISO532-3: 2023; Acoustics—Methods for Calculating Loudness—Part 3: Moore-Glasberg-Schlittenlacher. International Organization for Standardization: Geneva, Switzerland, 2023.
- DIN 45692; Measurement Technique for the Simulation of the Auditory Sensation of Sharpness. Deutsches Institut für Normung: Berlin, Germany, 2009.
- Aures, W. Berechnungsverfahren für den sensorischen Wohlklang beliebiger Schallsignale (A model for calculating the sensory euphony of various sounds). Acta Acust. United Acust. 1985, 59, 130–141. [Google Scholar]
- Zwicker, E.; Fastl, H. Psychoacoustics: Facts and Models; Springer Series in Information Sciences Volume 22; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Brooks, T.F.; Jolly, J.R., Jr.; Marcolini, M.A. Helicopter Main-Rotor Noise: Determination of Source Contributions Using Scaled Model Data; Technical Report; NASA Langley Research Centre: Hampton, VA, USA, 1988; Report Number: NASA-TP-2825. [Google Scholar]
- Intaratep, N.; Alexander, W.N.; Devenport, W.J.; Grace, S.M.; Dropkin, A. Experimental study of quadcopter acoustics and performance at static thrust conditions. In Proceedings of the 22nd AIAA/CEAS Aeroacoustics Conference, Lyon, France, 30 May–1 June 2016. Article Number: 2016-2873. [Google Scholar]
- Jamaluddin, N.S.; Celik, A.; Baskaran, K.; Rezgui, D.; Azarpeyvand, M. Aerodynamic noise analysis of tilting rotor in edgewise flow conditions. J. Sound Vib. 2024, 582, 118423. [Google Scholar] [CrossRef]
- Glauert, H. Airplane Propellers. In Aerodynamic Theory: A General Review of Progress; Springer: Berlin/Heidelberg, Germany, 1935; pp. 169–360. [Google Scholar]
- Avallone, F.; Van Der Velden, W.C.P.; Ragni, D.; Casalino, D. Noise reduction mechanisms of sawtooth and combed-sawtooth trailing-edge serrations. J. Fluid Mech. 2020, 848, 560–591. [Google Scholar] [CrossRef]
- Hollander, M.; Wolfe, D.A.; Chicken, E. Nonparametric Statistical Methods; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2013. [Google Scholar]
- Torija, A.J.; Nicholls, R.K. Investigation of metrics for assessing human response to drone noise. Int. J. Environ. Res. Public Health 2022, 19, 3152. [Google Scholar] [CrossRef]
- Gu, L.M. Innovation chain driving the integrated development of emerging industries: Theoretical logic and mechanism design. Mod. Econ. Discuss. 2024, 3, 80–86. [Google Scholar] [CrossRef]
- Li, C.J.; Ma, J.; Chai, Y.W.; Guan, M.B. Influence of neighborhood environment and noise pollution on residents’ mental health in Beijing. Prog. Geogr. 2019, 38, 1103–1110. [Google Scholar]
- Luo, J.; Zhu, K. The influential factors on the attraction of outstanding scientific and technological talents in developed cities in China. Sustainability 2023, 15, 6214. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).