The Impact of Lidar Elevation Uncertainty on Mapping Intertidal Habitats on Barrier Islands

 , , ,
, , ,
Abstract
:
1. Introduction
2. Materials and Methods
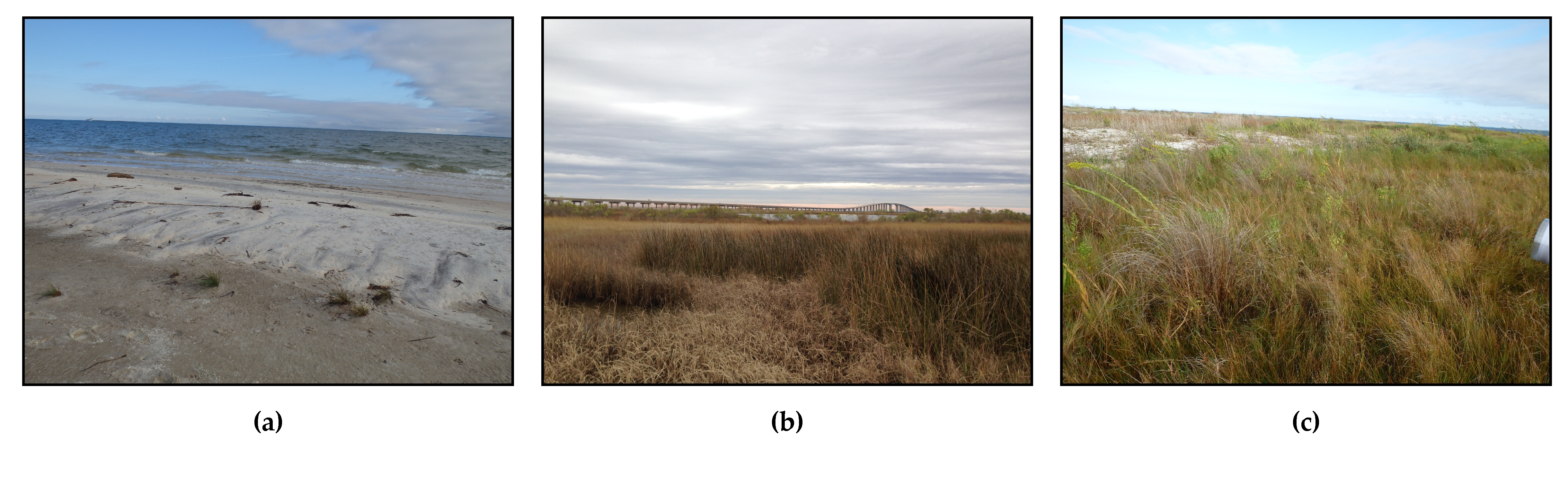
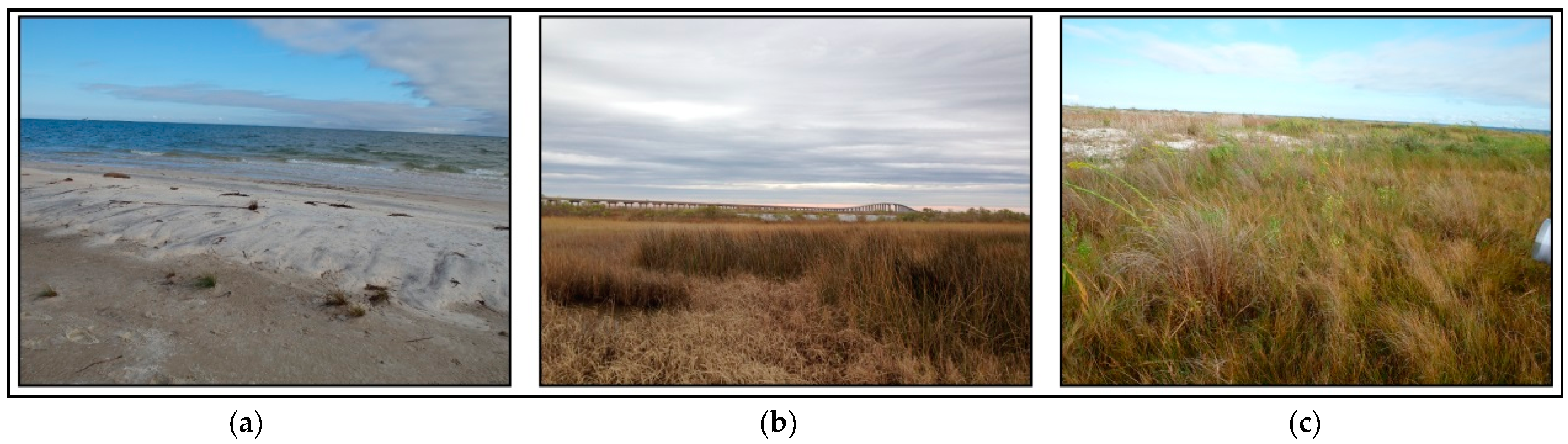
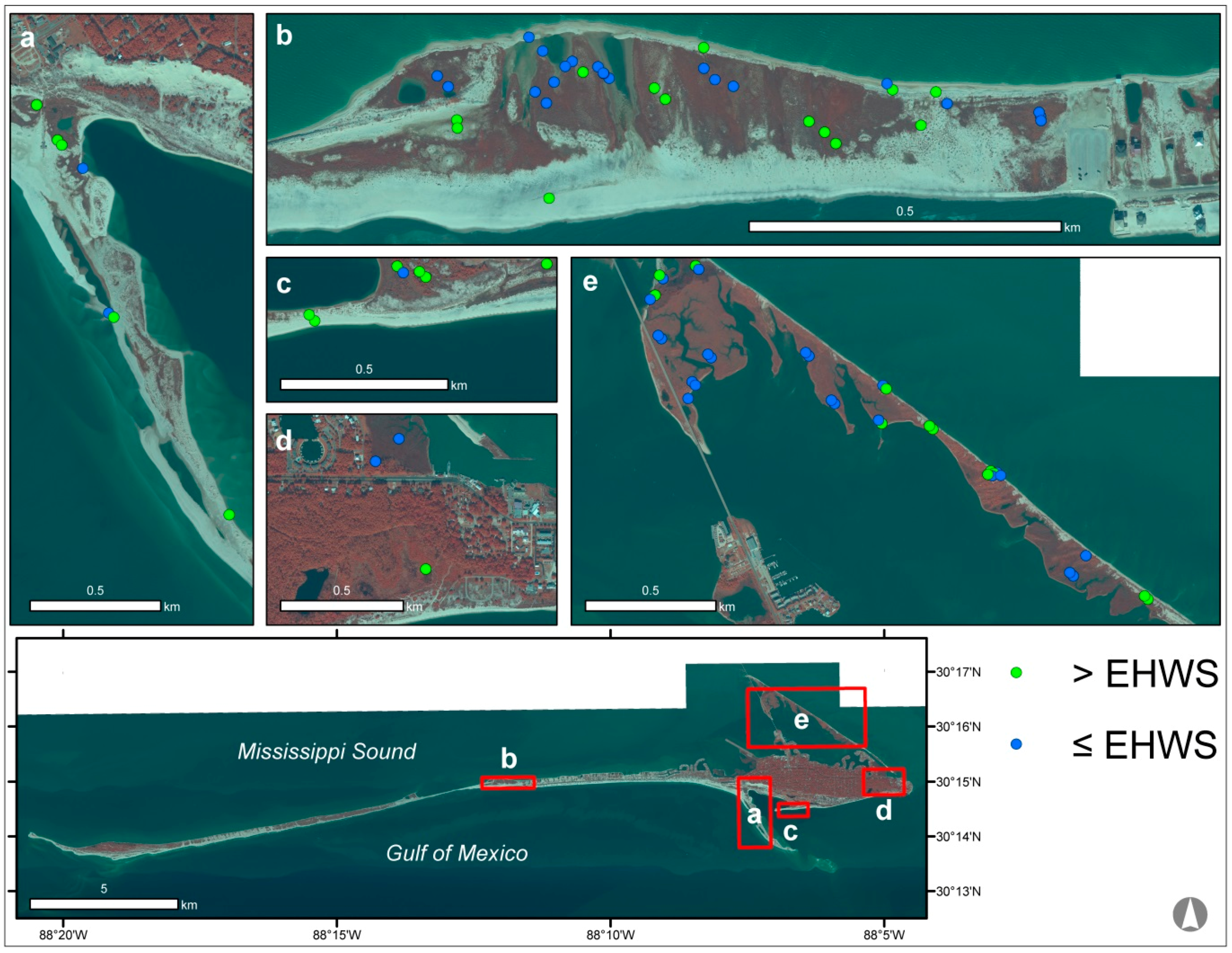
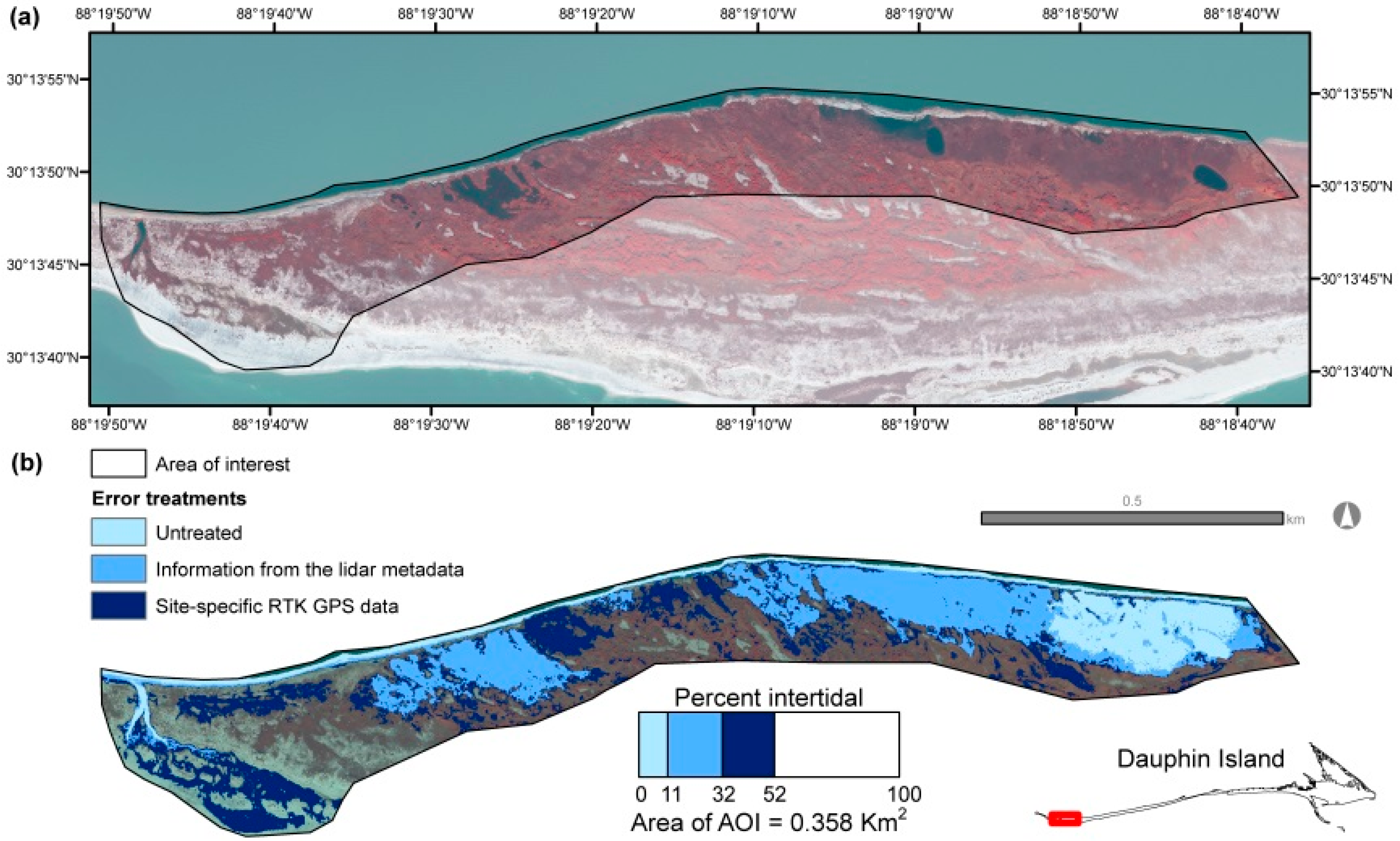
2.1. Study Site
2.2. Elevation Data
2.3. Tide and Water Level Data
2.4. Field Data Collection
2.5. Error and Bias
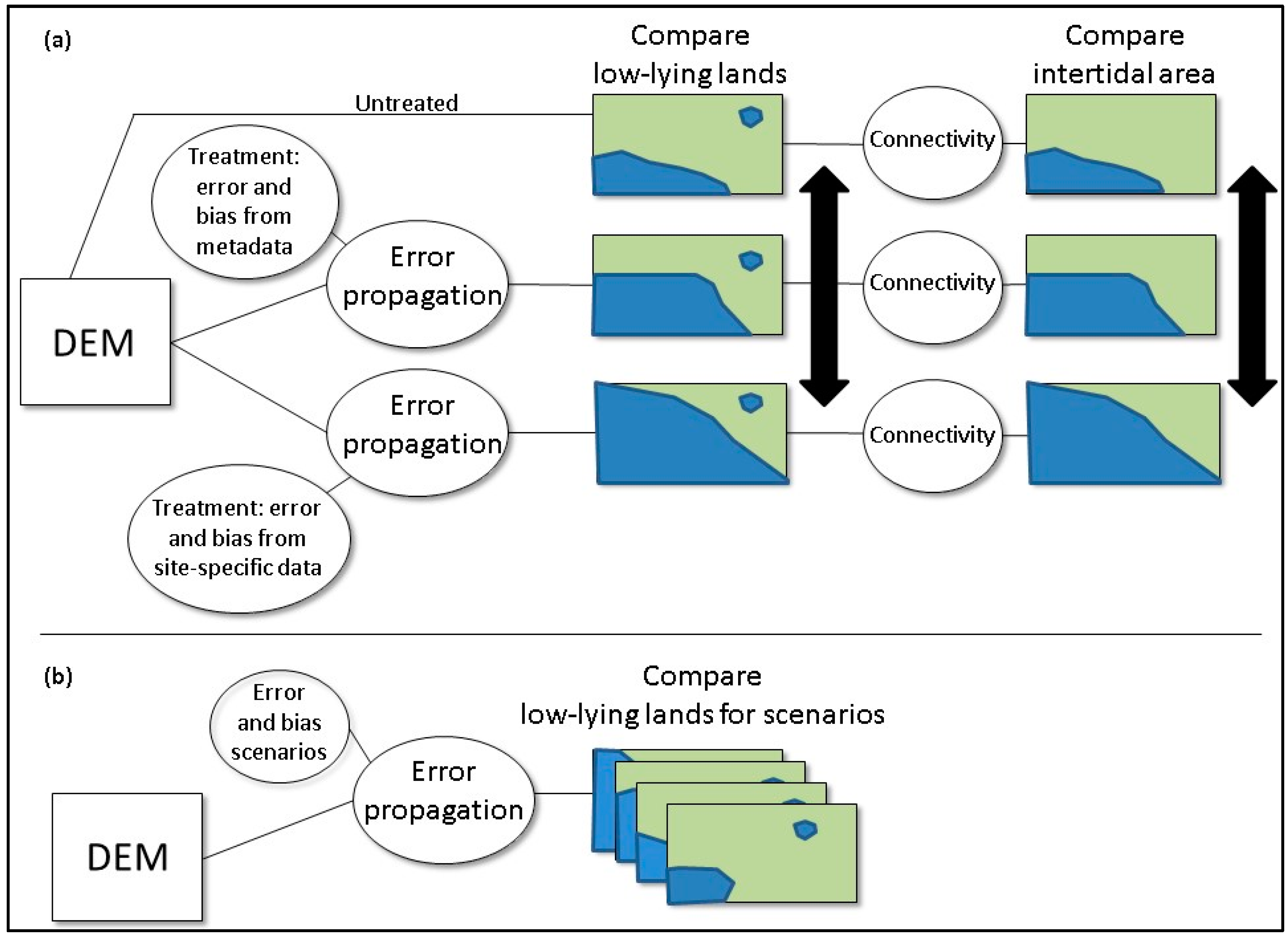
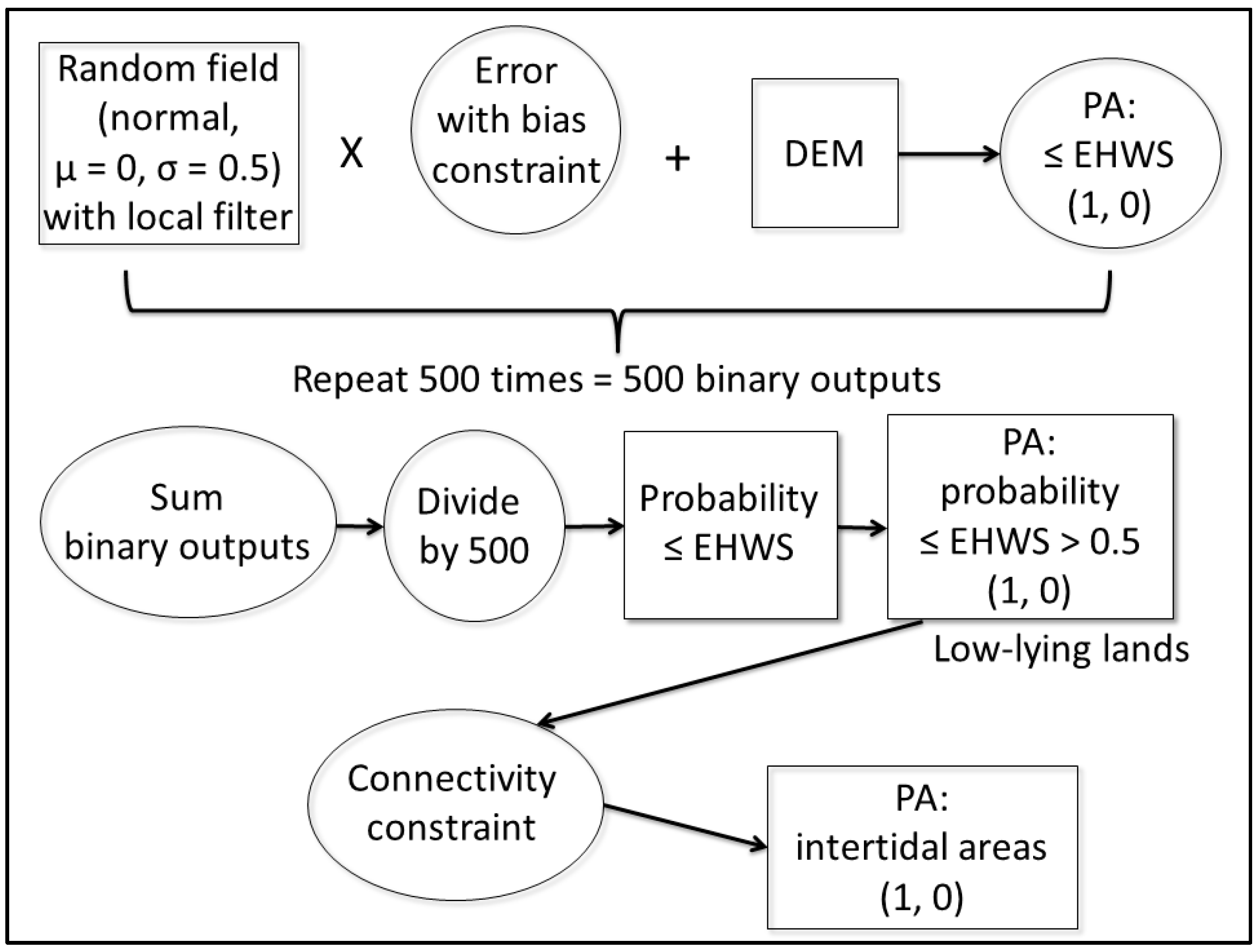
2.6. Monte Carlo DEM Error Propagation
2.7. Data Analyses
2.7.1. Analyses of Low-Lying Lands and Intertidal Areas
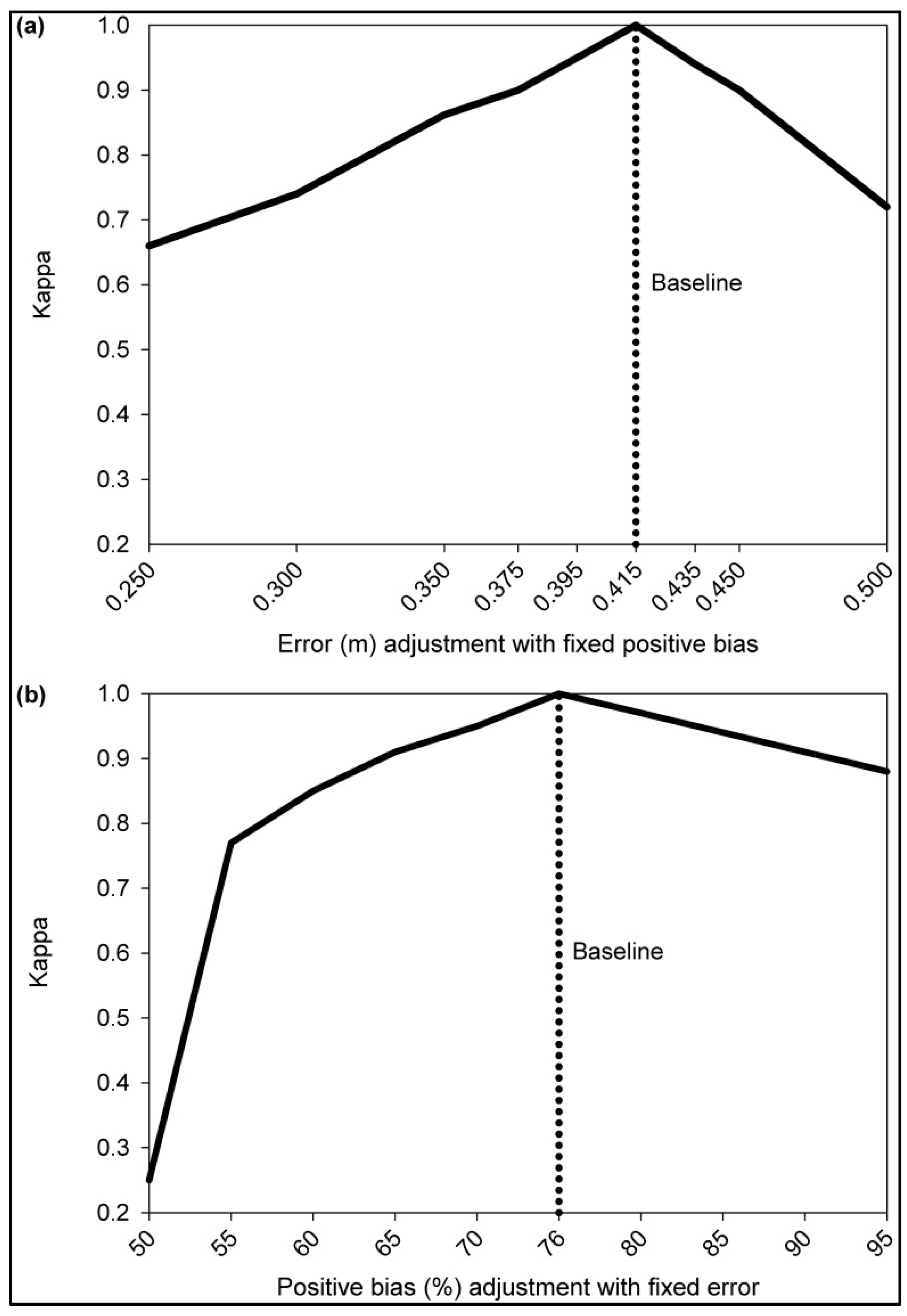
2.7.2. Sensitivity Analysis
3. Results
3.1. Identification of Low-Lying Lands
3.2. Intertidal Wetlands
3.3. Sensitivity Analysis
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Oertel, G.F. The barrier island system. Mar. Geol. 1985, 63, 1–18. [Google Scholar] [CrossRef]
- Stutz, M.L.; Pilkey, O.H. Open-ocean barrier islands: Global influence of climatic, oceanographic, and depositional settings. J. Coast. Res. 2011, 27, 207–222. [Google Scholar] [CrossRef]
- Carruthers, T.J.B.; Beckert, K.; Schupp, C.A.; Saxby, T.; Kumer, J.P.; Thomas, J.; Sturgis, B.; Dennison, W.C.; Williams, M.; Fischer, T.; et al. Improving management of a mid-Atlantic coastal barrier island through assessment of habitat condition. Estuar. Coast. Shelf Sci. 2013, 116, 74–86. [Google Scholar] [CrossRef]
- Lucas, K.L.; Carter, G.A. Decadal changes in habitat-type coverage on Horn Island, Mississippi, U.S.A. J. Coast. Res. 2010, 26, 1142–1148. [Google Scholar] [CrossRef]
- Kindinger, J.L.; Buster, N.A.; Flocks, J.G.; Bernier, J.C.; Kulp, M.A. Louisiana Barrier Island Comprehensive Monitoring (BICM) Program Summary Report: Data and Analyses 2006 through 2010; U.S. Geological Survey: Reston, VA, USA, 2013; p. 86.
- Barbier, E.B.; Hacker, S.D.; Kennedy, C.; Koch, E.W.; Stier, A.C.; Silliman, B.R. The value of estuarine and coastal ecosystem services. Ecol. Monogr. 2011, 81, 169–193. [Google Scholar] [CrossRef]
- Cowardin, L.M.; Carter, V.; Golet, F.C.; LaRoe, E.T. Classification of Wetlands and Deepwater Habitats of the United States; United States Department of Interior, Fish and Wildlife Service: Washington, DC, USA, 1979; p. 134.
- Costanza, R.; de Groot, R.; Sutton, P.; van der Ploeg, S.; Anderson, S.J.; Kubiszewski, I.; Farber, S.; Turner, R.K. Changes in the global value of ecosystem services. Glob. Environ. Chang. 2014, 26, 152–158. [Google Scholar] [CrossRef]
- Madden, M.; Jones, D.; Vilcheck, L. Photointerpretation key for the Everglades vegetation classification system. Photogramm. Eng. Remote Sens. 1999, 65, 171–177. [Google Scholar]
- Maxa, M.; Bolstad, P. Mapping northern wetlands with high resolution satellite images and lidar. Wetlands 2009, 29, 248–260. [Google Scholar] [CrossRef]
- Chust, G.; Galparsoro, I.; Borja, A.; Franco, J.; Uriate, A. Coastal and estuarine habitat mapping, using lidar height and intensity and multi-spectral imagery. Estuar. Coast. Shelf Sci. 2008, 78, 633–643. [Google Scholar] [CrossRef]
- McCarthy, M.J.; Halls, J.N. Habitat mapping and change assessment of coastal environments: An examination of worldview-2, quickbird, and ikonos satellite imagery and airborne lidar for mapping barrier island habitats. ISPRS Int. J. Geo-Inf. 2014, 3, 297–325. [Google Scholar] [CrossRef]
- Zinnert, J.C.; Shiflett, S.A.; Via, S.; Bissett, S.; Dows, B.; Manley, P.; Young, D.R. Spatial–temporal dynamics in barrier island upland vegetation: The overlooked coastal landscape. Ecosystems 2016, 19, 685–697. [Google Scholar] [CrossRef]
- Klemas, V. Remote sensing of emergent and submerged wetlands: An overview, international journal of remote sensing. Int. J. Remote Sens. 2013, 34, 6286–6320. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Bresnahan, P. Accuracy of airborne lidar-derived elevation: Empirical assessment and error budget. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar] [CrossRef]
- Su, J.; Bork, E. Influence of vegetation, slope, and lidar sampling angle on DEM accuracy. Photogramm. Eng. Remote Sens. 2006, 72, 1265–1274. [Google Scholar] [CrossRef]
- Medeiros, S.; Hagen, S.; Weishampel, J.; Angelo, J. Adjusting lidar-derived digital terrain models in coastal marshes based on estimated aboveground biomass density. Remote Sens. 2015, 7, 3507–3525. [Google Scholar] [CrossRef]
- Buffington, K.J.; Dugger, B.D.; Thorne, K.M.; Takekawa, J.Y. Statistical correction of lidar-derived digital elevation models with multispectral airborne imagery in tidal marshes. Remote Sens. Environ. 2016, 186, 616–625. [Google Scholar] [CrossRef]
- Schmid, K.A.; Hadley, B.C.; Wijekoon, N. Vertical accuracy and use of topographic lidar data in coastal marshes. J. Coast. Res. 2011, 27, 116–132. [Google Scholar] [CrossRef]
- Young, D.R.; Brantley, S.T.; Zinnert, J.C.; Vick, J.K. Landscape position and habitat polygons in a dynamic coastal environment. Ecosphere 2011, 2, 1–15. [Google Scholar] [CrossRef]
- Anderson, C.P.; Carter, G.A.; Funderbunk, W.R. The use of aerial RGB imagery and lidar in comparing ecological habitats and geomorphic features on a natural versus man-made barrier island. Remote Sens. 2016, 8, 602. [Google Scholar] [CrossRef]
- Stoker, J.M.; Abdullah, Q.A.; Nayegandhi, A.; Winehouse, J. Evaluation of single photon and geiger mode lidar for the 3D Elevation Program. Remote Sens. 2016, 8, 767. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Jaakkola, A. Mini-uav-borne lidar for fine-scale mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 426–430. [Google Scholar] [CrossRef]
- Hunter, G.J.; Goodchild, M.F. Dealing with error in spatial databases: A simple case study. Photogramm. Eng. Remote Sens. 1995, 61, 529–537. [Google Scholar]
- Wechsler, S.P.; Kroll, C.N. Quantifying DEM uncertainty and its effect on topographic parameters. Photogramm. Eng. Remote Sens. 2006, 72, 1081–1090. [Google Scholar] [CrossRef]
- Cooper, H.M.; Fletcher, C.H.; Chen, Q.; Barbee, M.M. Sea-level rise vulnerability mapping for adaptation decisions using lidar DEMs. Prog. Phys. Geogr. 2013, 37, 745–766. [Google Scholar] [CrossRef]
- Leon, J.X.; Heuvelink, G.B.M.; Phinn, S.R. Incorporating DEM uncertainty in coastal inundation mapping. PLoS ONE 2014, 9, e108727. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Sherman, D.; Gu, S. Automated extraction of shorelines from airborne light detection and ranging data andaccuracy assessment based on Monte Carlo simulation. J. Coast. Res. 2007, 23, 1359–1369. [Google Scholar] [CrossRef]
- American Society for Photogrammetry and Remote Sensing. ASPRS positional accuracy standards for digital geospatial data, November 2014. Photogramm. Eng. Remote Sens. 2015, 81, A1–A26. [Google Scholar]
- Enwright, N.M.; Borchert, S.B.; Day, R.H.; Feher, L.C.; Osland, M.J.; Wang, L.; Wang, H. Barrier Island Habitat Map and Vegetation Survey—Dauphin Island, Alabama, 2015; U.S. Geological Survey: Reston, VA, USA, 2017; p. 17.
- Otvos, E.G.J.; Carter, G.A. Hurricane degradation—Barrier development cycles, northeastern Gulf of Mexico: Landform evolution and island chain history. J. Coast. Res. 2008, 24, 463–478. [Google Scholar] [CrossRef]
- Morton, R.A. Historical changes in the Mississippi-Alabama barrier-island chain and the roles of extreme storms, sea level, and human activities. J. Coast. Res. 2008, 24, 1587–1600. [Google Scholar] [CrossRef]
- Heidemann, H.K. Lidar base specification. In U.S. Geological Survey Techniques and Methods; Heidemann, H.K., Ed.; U.S. Geological Survey: Reston, VA, USA, 2014; p. 67. [Google Scholar]
- Sugarbaker, L.J.; Constance, E.W.; Heidemann, H.K.; Jason, A.L.; Lukas, V.; Saghy, D.L.; Stoker, J.M. The 3D Elevation Program Initiative—A Call for Action; U.S. Geological Survey: Reston, VA, USA, 2014; p. 35.
- Arundel, S.T.; Archuleta, C.M.; Philips, L.A.; Roche, B.L.; Constance, E.W. 1-meter digital elevation model specification. In U.S. Geological Survey Techniques and Methods, Book 11; U.S. Geological Survey: Reston, VA, USA, 2015; p. 25. [Google Scholar]
- Cooper, H.M.; Chen, Q. Incorporating uncertainty of future sea-level rise estimates into vulnerability assessment: A case study in Kahului, Maui. Clim. Chang. 2013, 121, 635–647. [Google Scholar] [CrossRef]
- Poulter, B.; Halpin, P.N. Raster modelling of coastal flooding from sea-level rise. Int. J. Geogr. Inf. Sci. 2008, 22, 167–182. [Google Scholar] [CrossRef]
- Enwright, N.M.; Griffith, K.T.; Osland, M.J. Barriers to and opportunities for landward migration of coastal wetlands with sea-level rise. Front. Ecol. Environ. 2016, 14, 307–316. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data Principles and Practices; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Schile, L.M.; Callaway, J.C.; Morris, J.T.; Stralberg, D.; Parker, V.T.; Kelly, M. Modeling tidal marsh distribution with sea-level rise: Evaluating the role of vegetation, sediment, and upland habitat in marsh resiliency. PLoS ONE 2014, 9, e88760. [Google Scholar] [CrossRef] [PubMed]
- Alizad, K.; Hagen, S.C.; Morris, J.T.; Medeiros, S.C.; Bilskie, M.V.; Weishampel, J.F. Coastal wetland response to sea-level rise in a fluvial estuarine system. Earth's Future 2016, 4, 483–497. [Google Scholar] [CrossRef]
- Kidwell, D.M.; Dietrich, J.C.; Hagen, S.C.; Medeiros, S.C. An earth’s future special collection: Impacts of the coastal dynamics of sea level rise on low-gradient coastal landscapes. Earth's Future 2017, 5, 2–9. [Google Scholar] [CrossRef]
- Parker, B.B. The difficulties in measuring a consistently defined shoreline—The problem of vertical referencing. J. Coast. Res. 2003, SI 38, 44–56. [Google Scholar]
- Galbraith, H.; DesRochers, D.W.; Brown, S.; Reed, J.M. Predicting vulnerabilities of North American shorebirds to climate change. PLoS ONE 2014, 9, e108899. [Google Scholar] [CrossRef] [PubMed]
- Lester, L.A.; Ramierez, M.G.; Kneidel, A.H.; Heckscher, C.M. Use of a Florida Gulf Coast barrier island by spring trans-gulf migrants and the projected effects of sea level rise on habitat availability. PLoS ONE 2016, 11, e0148975. [Google Scholar] [CrossRef] [PubMed]
- Katselidis, K.A.; Schofield, G.; Stamou, G.; Dimopoulos, P.; Pantis, J.D. Employing sea-level rise scenarios to strategically select sea turtle nesting habitat important for long-term management at a temperate breeding area. J. Exp. Mar. Biol. Ecol. 2014, 450, 47–54. [Google Scholar] [CrossRef]
- Plant, N.G.; Thieler, E.R.; Passeri, D.L. Coupling centennial-scale shoreline change to sea-level rise and coastal morphology in the Gulf of Mexico using a Bayesian network. Earth's Future 2016, 4, 143–158. [Google Scholar] [CrossRef]
- Sallenger, A.H. Storm impact scale for barrier islands. J. Coast. Res. 2000, 16, 890–895. [Google Scholar]
- Stockdon, H.F.; Doran, K.J.; Thompson, D.M.; Sopkin, K.L.; Plant, N.G.; Sallenger, A.H. National Assessment of Hurricane-Induced Coastal Erosion Hazards—Gulf of Mexico; U.S. Geological Survey: Reston, VA, USA, 2012; p. 51.
- Brennan, R.; Webster, T.L. Object-oriented land cover classification of lidar-derived surfaces. Can. J. Remote Sens. 2006, 32, 162–172. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measure | Site-Specific RTK GPS Data | Lidar Metadata |
|---|---|---|
| Positive bias (%) | Nonvegetated (n = 7): 57.1 | Nonvegetated (n = 22): 36.3 |
| Vegetated (n = 55): 94.5 | Vegetated (n = 18): 72.2 | |
| Average (n = 62): 76.0 | Average (n = 40): 54.0 | |
| Skewness | 0.545 | 0.959 |
| 95th percentile error (m) | 0.415 | 0.326 |
| Positive Bias (%) |
|---|
| 50 |
| 55 |
| 60 |
| 65 |
| 70 |
| 76 1 |
| 80 |
| 85 |
| 90 |
| 95 |
| Error (m) |
|---|
| 0.250 |
| 0.300 |
| 0.350 |
| 0.375 |
| 0.395 |
| 0.415 1 |
| 0.435 |
| 0.450 |
| 0.500 |
| Error Treatment | Area of Low-Lying Lands (km2) | Producer’s Accuracy (%) | User’s Accuracy (%) |
|---|---|---|---|
| Untreated | 1.8 | 60.4 | 96.4 |
| Information from lidar metadata | 2.5 | 79.2 | 84.4 |
| Site-specific RTK GPS data | 3.1 | 87.5 | 68.9 |
| Error Treatment | Intertidal Area (km2) |
|---|---|
| Untreated | 1.6 |
| Information from lidar metadata | 2.3 |
| Site-specific RTK GPS data | 2.9 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Enwright, N.M.; Wang, L.; Borchert, S.M.; Day, R.H.; Feher, L.C.; Osland, M.J. The Impact of Lidar Elevation Uncertainty on Mapping Intertidal Habitats on Barrier Islands. Remote Sens. 2018, 10, 5. https://doi.org/10.3390/rs10010005
Enwright NM, Wang L, Borchert SM, Day RH, Feher LC, Osland MJ. The Impact of Lidar Elevation Uncertainty on Mapping Intertidal Habitats on Barrier Islands. Remote Sensing. 2018; 10(1):5. https://doi.org/10.3390/rs10010005
Chicago/Turabian StyleEnwright, Nicholas M., Lei Wang, Sinéad M. Borchert, Richard H. Day, Laura C. Feher, and Michael J. Osland. 2018. "The Impact of Lidar Elevation Uncertainty on Mapping Intertidal Habitats on Barrier Islands" Remote Sensing 10, no. 1: 5. https://doi.org/10.3390/rs10010005
APA StyleEnwright, N. M., Wang, L., Borchert, S. M., Day, R. H., Feher, L. C., & Osland, M. J. (2018). The Impact of Lidar Elevation Uncertainty on Mapping Intertidal Habitats on Barrier Islands. Remote Sensing, 10(1), 5. https://doi.org/10.3390/rs10010005