Error Source Analysis and Correction of GF-3 Polarimetric Data



Abstract
:1. Introduction
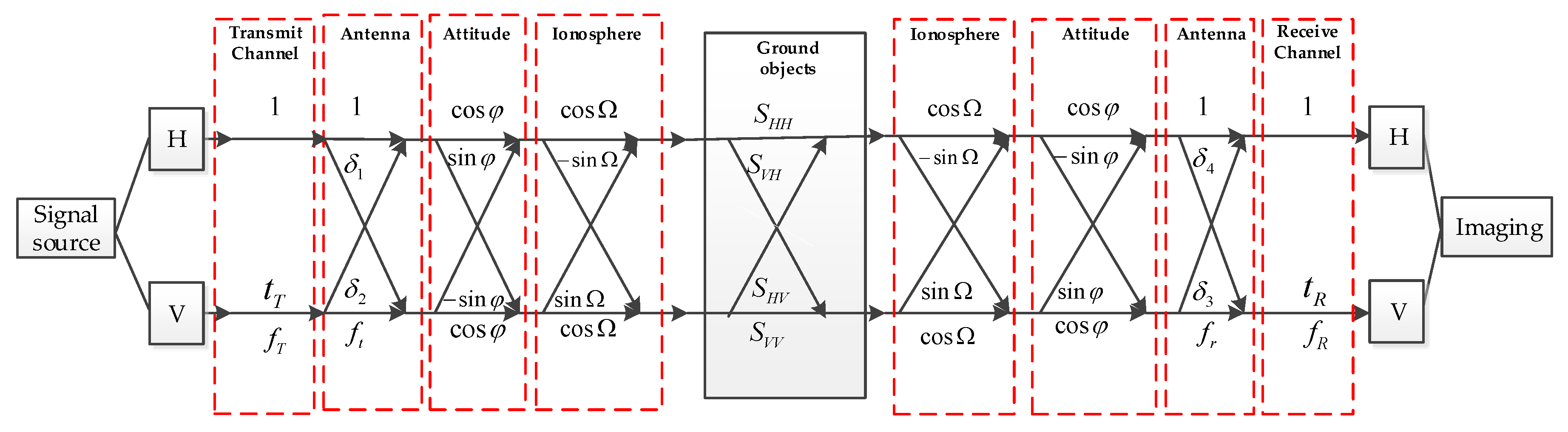
2. Error Model of Polarization Observation
3. Influence Analysis of Error Source
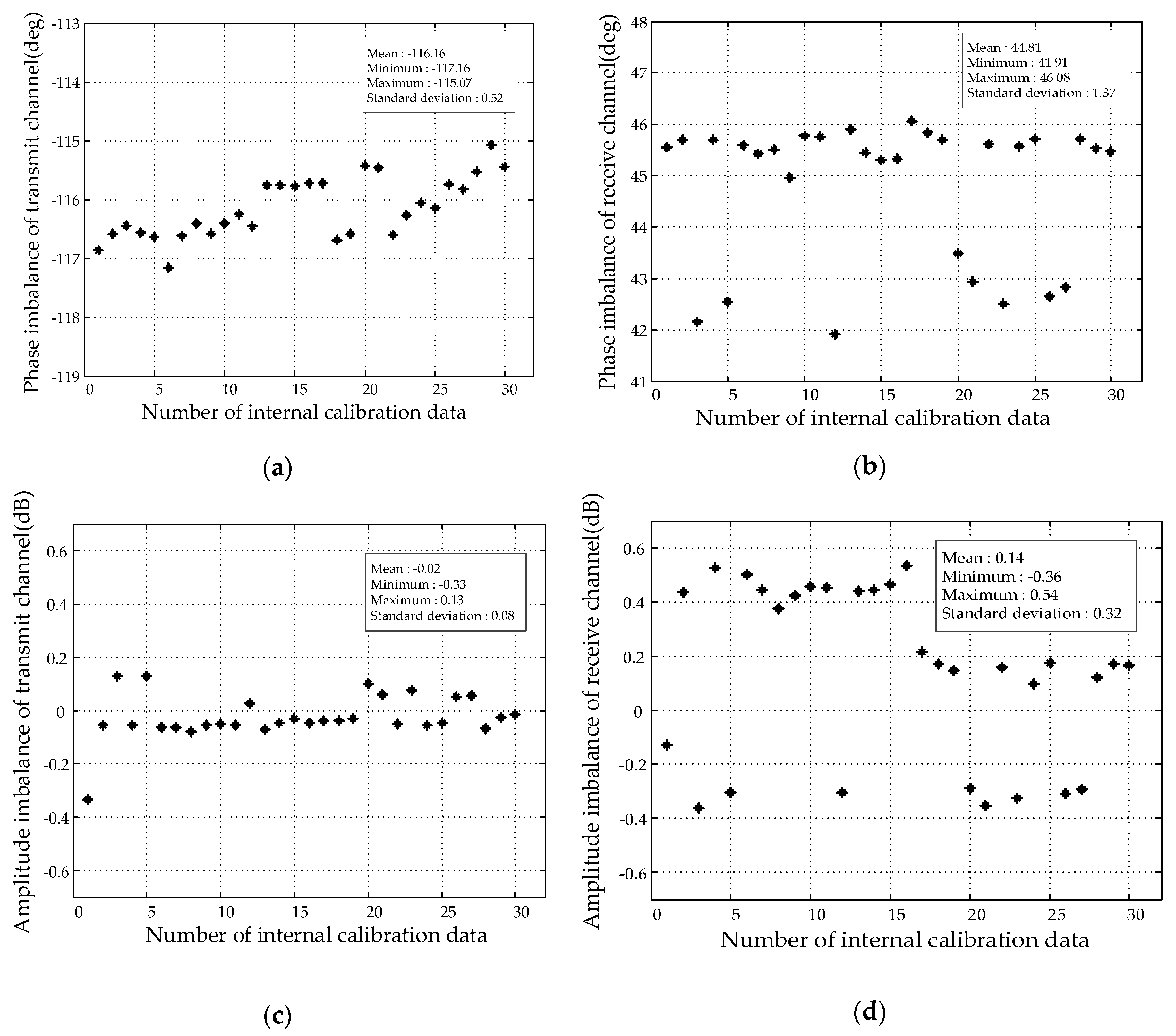
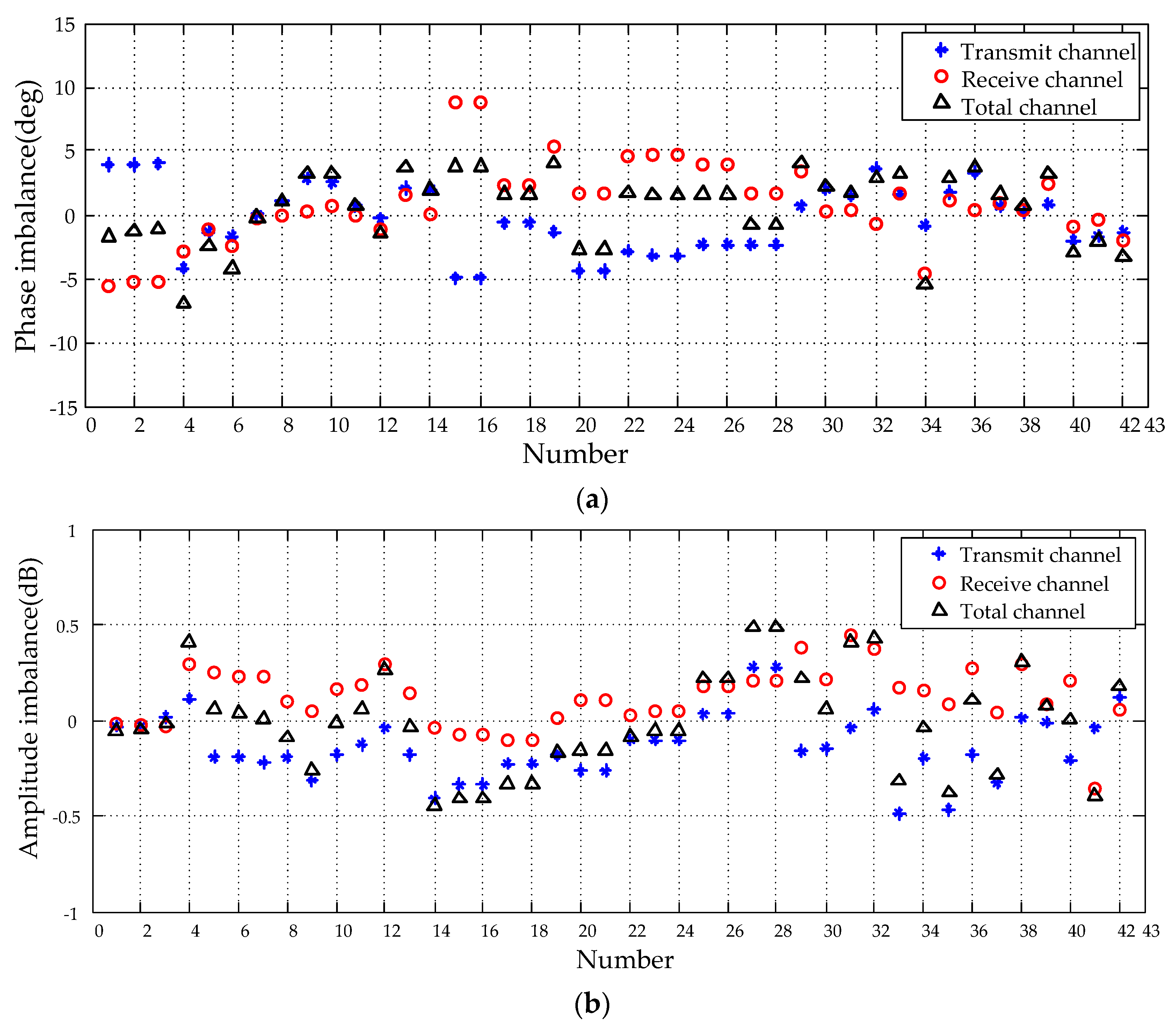
3.1. Channel Imbalances of Transmit and Receive Channel
- (1)
- Extract the four suitable echoes (HH, HV, VH, VV) of the internal calibration loop covering transmit and receive channel from the internal calibration data;
- (2)
- Do pulse compression and extract the peak amplitude and phase of the four compressed pulses, then calculate the imbalances between the polarization channels;
- (3)
- Extract the pulses of the reference internal calibration loop, and get the peak amplitude and phase of the compressed pulses, calculate the imbalances caused by the internal calibrator itself.
- (4)
- Eliminate the imbalances in (3) from the imbalances in (2), then the results of and can be calculated.
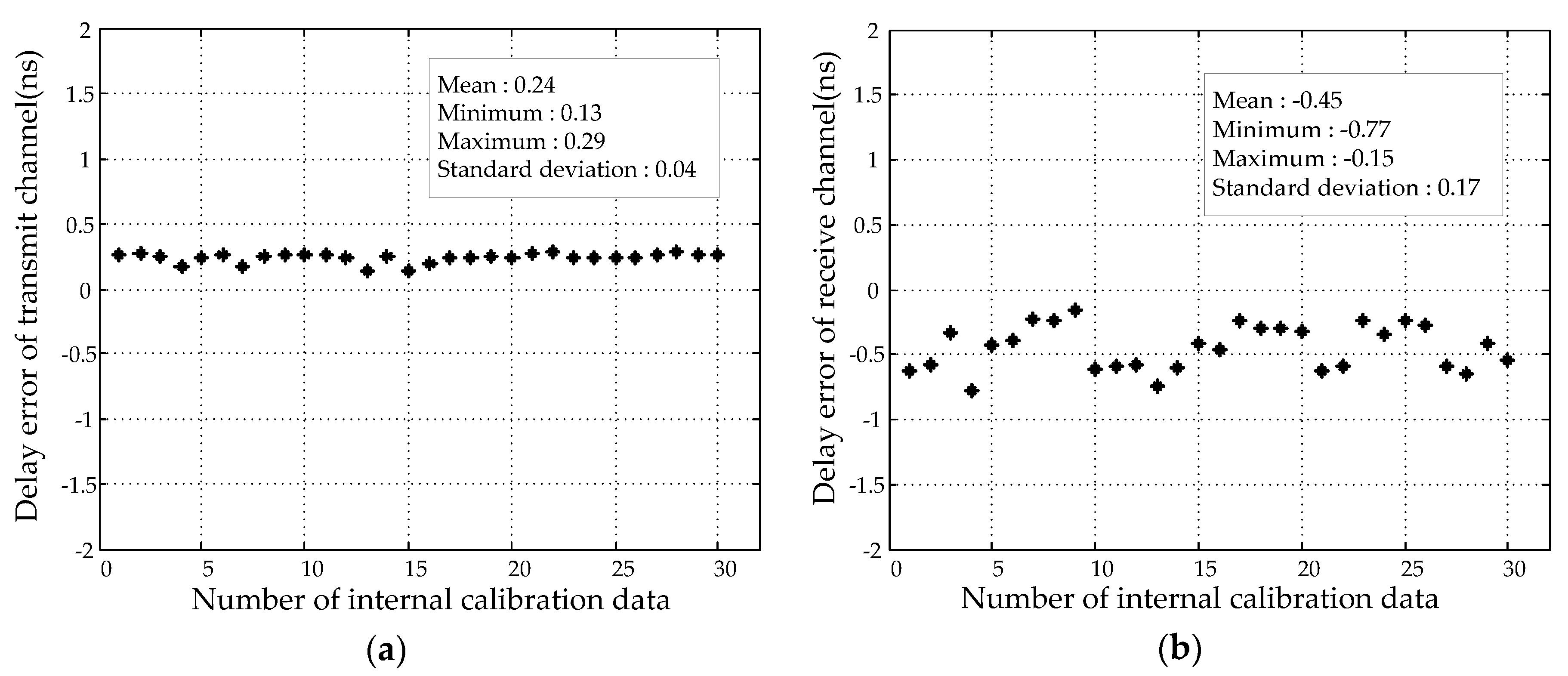
3.2. Sampling Delay Error
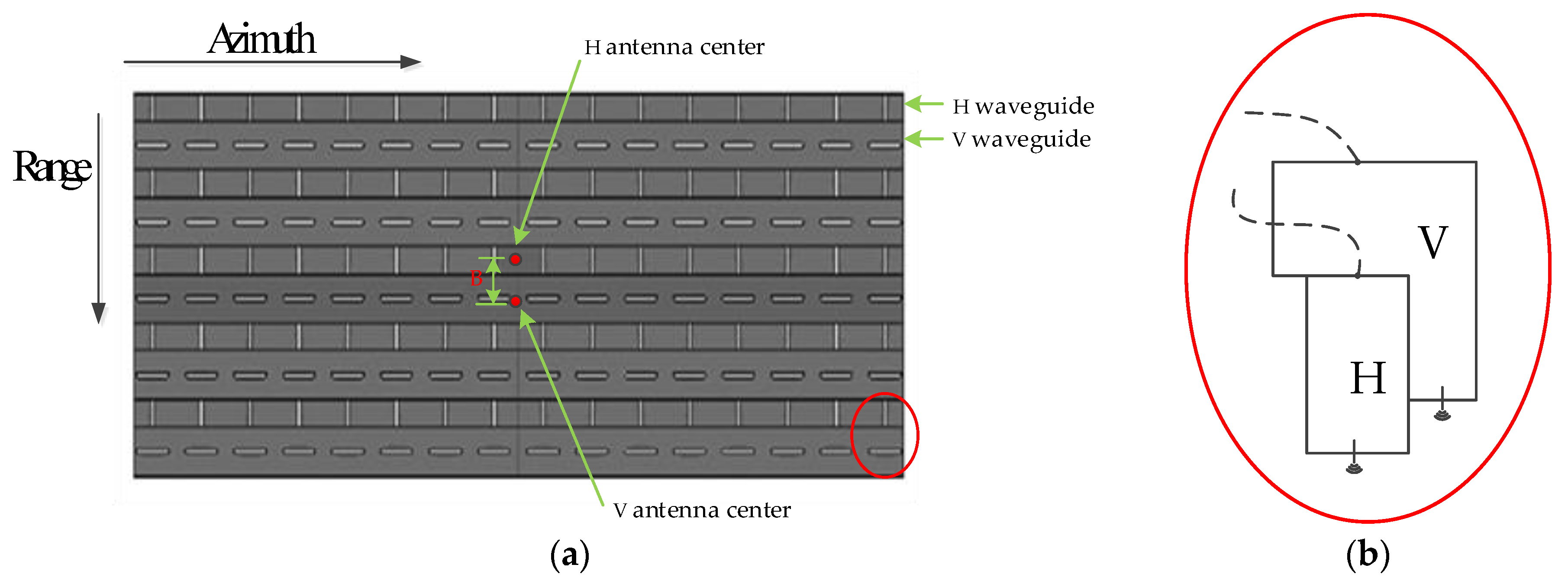
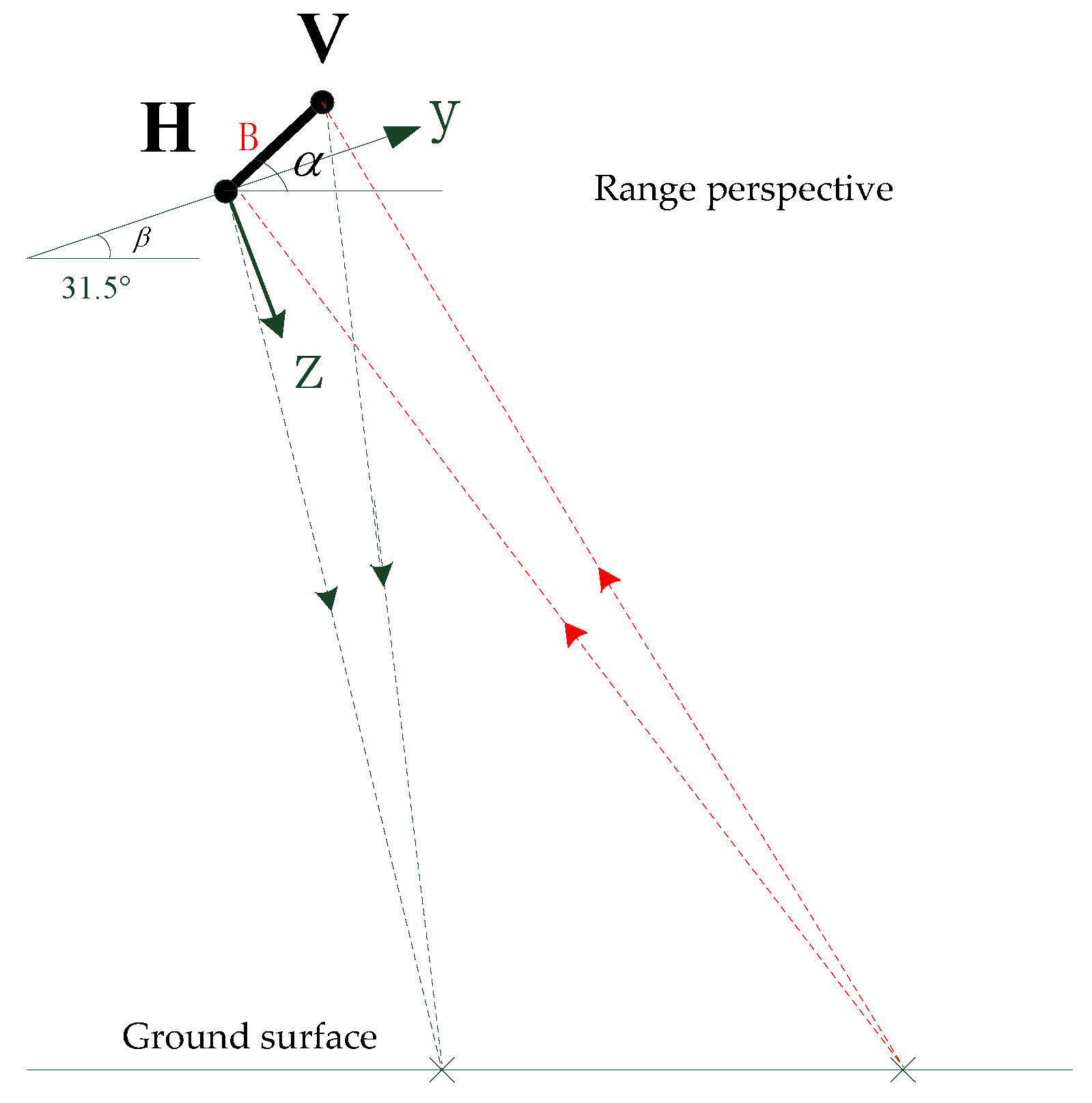
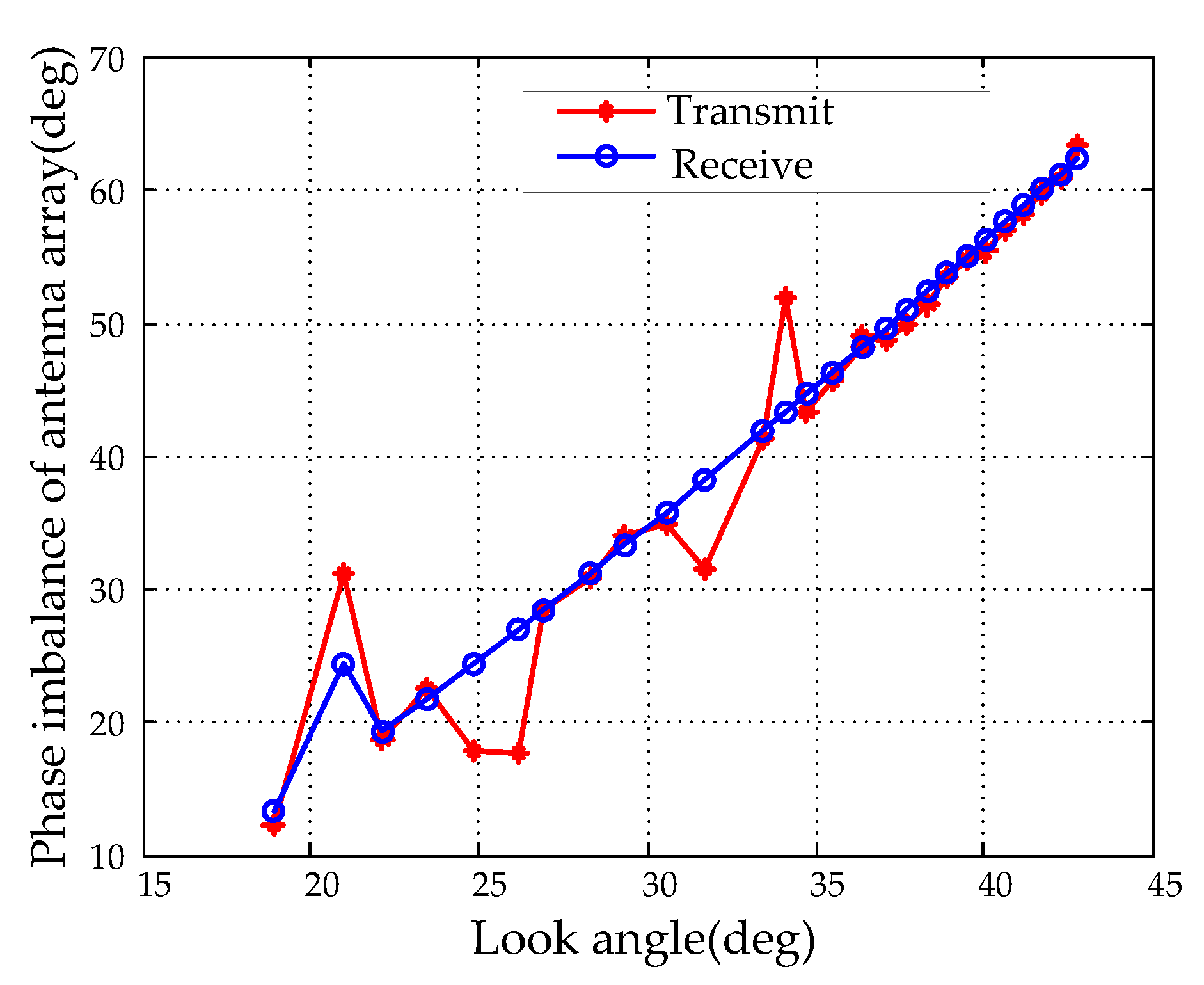
3.3. Error of the Antenna Array
3.4. Satellite Attitude Error
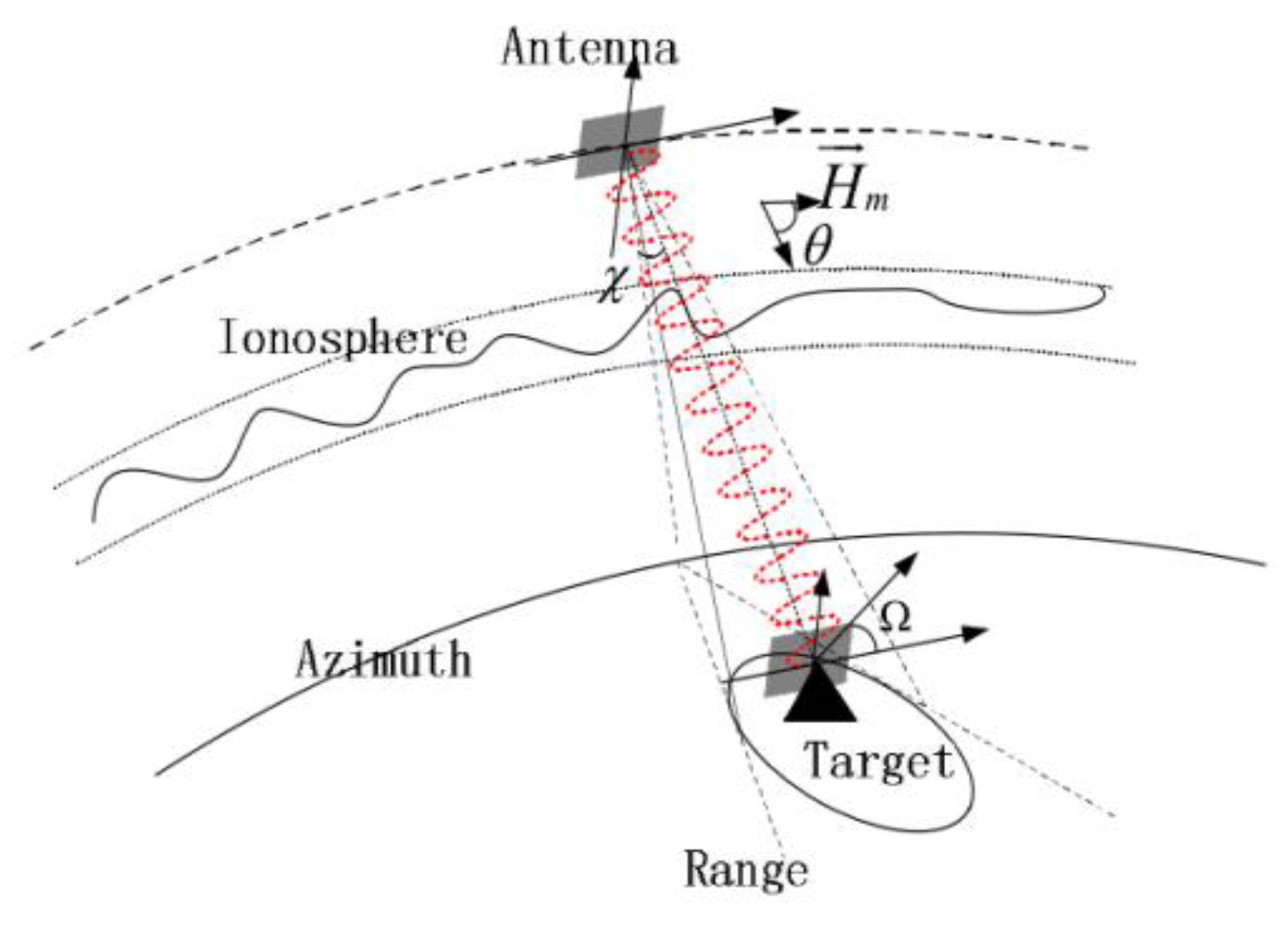
3.5. Ionosphere Effect
4. Polarization Correction and Verification
4.1. Polarization Correction Method
- (1)
- The fixed phase difference in Equation (3) is calibrated by three group data with PARCs [16];
- (2)
- Based on the result of step 1, the phase imbalances and are calculated by Equation (5);
- (3)
- Channel imbalances and are extracted by the internal calibration corresponding to imaging data;
- (4)
- According to the results of step 2 and 3, the distortion matrixes R and T are obtained;
- (5)
- The M is corrected to obtain the true scattering matrix (S) using Equation (9).
4.2. Quality Assessment of Corrected Data
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ding, C.; Liu, J.; Lei, B.; Qiu, X. Preliminary Exploration of Systematic Geolocation Accuracy of GF-3 SAR Satellite System. J. Radars 2017, 6, 11–16. [Google Scholar]
- Zhang, Q. System Design and Key Technologies of the GF-3 Satellite. Acta Geod. Cartogr. Sin. 2017, 46, 269–277. [Google Scholar]
- Jianchao, F.; Deyi, W.; Jianhua, Z.; Derui, S.; Min, H. National Sea Area Use Dynamic Monitoring Based on GF-3 SAR Imagery. J. Radars 2017, 6, 456–472. [Google Scholar]
- Shengyang, L.; Zhihui, X.; Ziqi, C.; Ao, Z.; Wenyong, Y. Application of GF-3 Satellite Imagery in Yellow River Flood Monitoring. Water Resour. Informatiz. 2017, 5, 22–26. [Google Scholar]
- Bickel, S.H.; Bates, R.H.T. Effects of magneto-ionic propagation on the polarization scattering matrix. Proc. IEEE 1965, 53, 1089–1091. [Google Scholar] [CrossRef]
- Van Zyl, J.J. Calibration of polarimetric radar images using only image parameters and trihedral corner reflector responses. Geosci. Remote Sens. IEEE Trans. 1990, 28, 337–348. [Google Scholar] [CrossRef]
- Ming, F.; Hong, J.; Zhang, L. Improved Calibration Method of the Airborne Polarimetric SAR. In Proceedings of the International Asia-Pacific Conference on Synthetic Aperture Radar, Seoul, Korea, 26–30 September 2011; pp. 1–3. [Google Scholar]
- Sun, J.; Yu, W.; Deng, Y. The SAR Payload Design and Performance for the GF-3 Mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [PubMed]
- Han, B.; Ding, C.; Zhong, L.; Liu, J.; Qiu, X.; Hu, Y.; Lei, B. The GF-3 SAR Data Processor. Sensors 2018, 18, 835. [Google Scholar] [CrossRef] [PubMed]
- Sarabandi, K.; Pierce, L.E.; Dobson, M.C.; Ulaby, F.T. Polarimetric calibration of SIR-C using point and distributed targets. IEEE Trans. Geosci. Remote Sens. 1995, 33, 858–866. [Google Scholar] [CrossRef]
- Luscombe, A.P.; Chotoo, K.; Huxtable, B.D. Polarimetric calibration for RADARSAT-2. In Proceedings of the IEEE 2000 International Geoscience and Remote Sensing Symposium, IGARSS 2000, Honolulu, HI, USA, 24–28 July 2000; pp. 2197–2199. [Google Scholar]
- Thompson, A.A.; Luscombe, A.; James, K.; Fox, P. RADARSAT-2 Mission Status: Capabilities Demonstrated and Image Quality Achieved. In Proceedings of the European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Martínez, N.G.; Miguel, B.G.; Pescador, A.L.; Revenga, P.C.; Borge, J.C.N. Cross-calibration of full polarimetric RIX and TerraSAR-X data. In Proceedings of the IEEE 2012 International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5864–5867. [Google Scholar]
- Touzi, R.; Shimada, M. Calibration and validation of polarimetric ALOS2. In Proceedings of the Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 4113–4116. [Google Scholar]
- Wright, P.A.; Quegan, S.; Wheadon, N.S.; Hall, C.D. Faraday rotation effects on L-band spaceborne SAR data. Geosci. Remote Sens. IEEE Trans. 2003, 41, 2735–2744. [Google Scholar] [CrossRef]
- Luscombe, A.P.; Thompson, A. RADARSAT-2 calibration: Proposed targets and techniques. In Proceedings of the IGARSS ‘01. IEEE 2001 International Geoscience and Remote Sensing Symposium, Sydney, Australia, 9–13 July 2001; pp. 496–498. [Google Scholar]
- Braeutigam, B.; Gonzalez, J.H.; Schwerdt, M.; Bachmann, M. Radar Instrument Calibration of TerraSAR-X. In Proceedings of the European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Schwerdt, M.; Schmidt, K.; Ramon, N.T.; Alfonzo, G.C.; Döring, B.; Zink, M.; Prats, P. Independent verification of the Sentinel-1A system calibration. In Proceedings of the Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 994–1007. [Google Scholar]
- Wang, S.; Qi, H.; Yu, W. An Internal Calibration Scheme for Polarimetric Synthetic Aperture Radar System. IEEE Trans. Geosci. Remote Sens. 2010, 49, 15–20. [Google Scholar] [CrossRef]
- Luscombe, A.P. RADARSAT-2 SAR image quality and calibration operations. Can. J. Remote Sens. 2004, 30, 345–354. [Google Scholar] [CrossRef]
- Ren, B.; Zhao, L.; Zhu, F. Design of C-band Multi-polarized Active Phased Array Antenna System for GF-3 Satellite. Spacecr. Eng. 2017, 26, 68–74. [Google Scholar]
- Sun, J.; Yu, W.; Deng, Y. Design of Working Modes and Payload of SAR for GF-3 Satellite. Spacecr. Eng. 2017, 26, 61–67. [Google Scholar]
- Jiang, S.; Qiu, X.; Han, B.; Hu, W. A Quality Assessment Method Based on Common Distributed Targets for GF-3 Polarimetric SAR Data. Sensors 2018, 18, 807. [Google Scholar] [CrossRef] [PubMed]
- Hong, J.; Wang, Y.; Yi, M.; Zhu, Y.; Li, L.; Ming, F. A Revised Polarimetric Calibration Method for GF-3 SAR with Active Radar Transponder. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium—Fall (PIERS—FALL), Singapore, 22–25 May 2017. [Google Scholar]
- Stiglitz, M.R.; Callahan, J. Phased-Array Antenna Handbook; Artech House: Norwood, MA, USA, 1994. [Google Scholar]
- Jinping, Z.; Bo, R.; Fuguo, Z. A study on pattern model of phased array based on the characteristics of array elements. Mod. Radar 2016, 38, 65–69. [Google Scholar]
- Fiedler, H.; Boerner, E.; Mittermayer, J.; Krieger, G. Total zero Doppler Steering-a new method for minimizing the Doppler centroid. IEEE Geosci. Remote Sens. Lett. 2005, 2, 141–145. [Google Scholar] [CrossRef]
- Freeman, A.; Saatchi, S.S. On the detection of Faraday rotation in linearly polarized L-band SAR backscatter signatures. Geosci. Remote Sens. IEEE Trans. 2004, 42, 1607–1616. [Google Scholar] [CrossRef]
- Meyer, F.J.; Nicoll, J.B. Prediction, Detection, and Correction of Faraday Rotation in Full-Polarimetric L-Band SAR Data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3076–3086. [Google Scholar] [CrossRef]
- Nicoll, J.; Meyer, F.; Jehle, M. Prediction and detection of Faraday rotation in ALOS PALSAR data. In Proceedings of the Geoscience and Remote Sensing Symposium, 2007 (IGARSS 2007), Barcelona, Spain, 23–27 July 2007; pp. 5210–5213. [Google Scholar]
- Freeman, A. Calibration of linearly polarized polarimetric SAR data subject to Faraday rotation. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1617–1624. [Google Scholar] [CrossRef]
- Shimada, M. Model-Based Polarimetric SAR Calibration Method Using Forest and Surface-Scattering Targets. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1712–1733. [Google Scholar] [CrossRef]
- Whitt, M.W.; Ulaby, F.T.; Polatin, P.; Liepa, V.V. A general polarimetric radar calibration technique. IEEE Trans. Antennas Propag. 1991, 39, 62–67. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Work Modes | Incidence Angle (°) | Look Number A × E | Resolution (m) | Imaging Bandwidth (km) | Polarization Mode | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| Nominal | Azimuth | Range | Nominal | Size | ||||||
| 1 | Spotlight (SL) | 20~50 | 1 × 1 | 1 | 1.0~1.5 | 0.9~2.5 | 10×10 | 10 × 10 | Optional single polarization | |
| 2 | Ultra-fine strip (UFS) | 20~50 | 1 × 1 | 3 | 3 | 2.5~5 | 30 | 30 | Optional single polarization | |
| 3 | Fine strip I (FSI) | 19~50 | 1 × 1 | 5 | 5 | 4~6 | 50 | 50 | Optional dual polarization | |
| 4 | Fine strip II (FSII) | 19~50 | 1 × 2 | 10 | 10 | 8~12 | 100 | 95~110 | Optional dual polarization | |
| 5 | Standard strip (SS) | 17~50 | 3 × 2 | 25 | 25 | 15~30 | 130 | 95~150 | Optional dual polarization | |
| 6 | Narrow scan (NSC) | 17~50 | 1 × 6 | 50 | 50~60 | 30~60 | 300 | 300 | Optional dual polarization | |
| 7 | Wide scan (WSC) | 17~50 | 1 × 8 | 100 | 100 | 50~110 | 500 | 500 | Optional dual polarization | |
| 8 | Global (GLO) | 17~53 | 2 × (2~4) | 500 | 500 | 350~700 | 650 | 650 | Optional dual polarization | |
| 9 | Full Polarized Strip I (QPSI) | 20~41 | 1 × 1 | 8 | 8 | 6~9 | 30 | 20~35 | full polarization | |
| 10 | Full Polarized Strip II (QPSII) | 20~38 | 3 × 2 | 25 | 25 | 15~30 | 40 | 35~50 | full polarization | |
| 11 | Wave imaging (WAV) | 20~41 | 1 × 2 | 10 | 10 | 8~12 | 5×5 | 5 × 5 | full polarization | |
| 12 | Extended (EXT) | Low | 10~20 | 3 × 2 | 25 | 25 | 15~30 | 130 | 120~150 | Optional dual polarization |
| high | 50~60 | 3 × 2 | 25 | 25 | 20~30 | 80 | 70~90 | Optional dual polarization | ||
| Amount of Data | Number of Covered Beams | Covered Look Angles (deg) | Options of Bandwidth and Pulse Duration | Time Span (months) |
|---|---|---|---|---|
| 30 | 16 | Almost U (18.9~42.75) | 6 | 4 |
| Number | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Mode | Q9 | Q15 | Q17 | Q25 |
| Look angle (deg) | 29.36 | 35.5 | 36.41 | 41.18 |
| (deg) | −0.003 | 0.005 | −0.001 | −0.001 |
| Number | HH (dB) | HV (dB) | VH (dB) | VV (dB) | HH-VV (dB) |
|---|---|---|---|---|---|
| 1 | −43.8 | −74.0 | 0 | −43.6 | −75.5 |
| 2 | −43.4 | −77.1 | 0 | −45.1 | −58.4 |
| 3 | −41.4 | −68.3 | 0 | −40.1 | −57.2 |
| 4 | −45.8 | −71.0 | 0 | −44.5 | −61.7 |
| TEC | Common Value (5~20) | Maximum at Weak Solar Activity (about 50) | Maximum at Intense Solar Activity (about 100) |
|---|---|---|---|
| B | Mean | Maximum | Maximum |
| (deg) | <0.18 | <0.6 | <1.21 |
| Number | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Latitude (deg) | 4.38 | 24.45 | 31.89 | 44.05 | 51.7 |
| (deg) | 0.02 | 0.07 | 0.04 | 0.02 | 0.05 |
| Number | Mode | Amplitude Imbalance (dB) VV/HH | Phase Imbalance (deg) VV-HH | Isolation (dB) HV/HH or VH/HH |
|---|---|---|---|---|
| 1 | Q9 | −0.03 | 5.2 | 38.7 |
| 2 | Q15 | 0.04 | 2.1 | 37.1 |
| 3 | Q17 | 0.13 | 3.6 | 42.0 |
| 4 | Q25 | −0.05 | 1.7 | 39.9 |
| 5 | Q25 | −0.12 | −0.43 | 37.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, S.; Qiu, X.; Han, B.; Sun, J.; Ding, C. Error Source Analysis and Correction of GF-3 Polarimetric Data. Remote Sens. 2018, 10, 1685. https://doi.org/10.3390/rs10111685
Jiang S, Qiu X, Han B, Sun J, Ding C. Error Source Analysis and Correction of GF-3 Polarimetric Data. Remote Sensing. 2018; 10(11):1685. https://doi.org/10.3390/rs10111685
Chicago/Turabian StyleJiang, Sha, Xiaolan Qiu, Bing Han, Jili Sun, and Chibiao Ding. 2018. "Error Source Analysis and Correction of GF-3 Polarimetric Data" Remote Sensing 10, no. 11: 1685. https://doi.org/10.3390/rs10111685
APA StyleJiang, S., Qiu, X., Han, B., Sun, J., & Ding, C. (2018). Error Source Analysis and Correction of GF-3 Polarimetric Data. Remote Sensing, 10(11), 1685. https://doi.org/10.3390/rs10111685