Permafrost Terrain Dynamics and Infrastructure Impacts Revealed by UAV Photogrammetry and Thermal Imaging

 , ,
, ,
Abstract
:
1. Introduction
- Quantify thaw slump dynamics, estimate patterns, and volumes of downslope sediment transfer over daily, monthly, and annual time-scales, including an assessment of features that influence road embankment integrity;
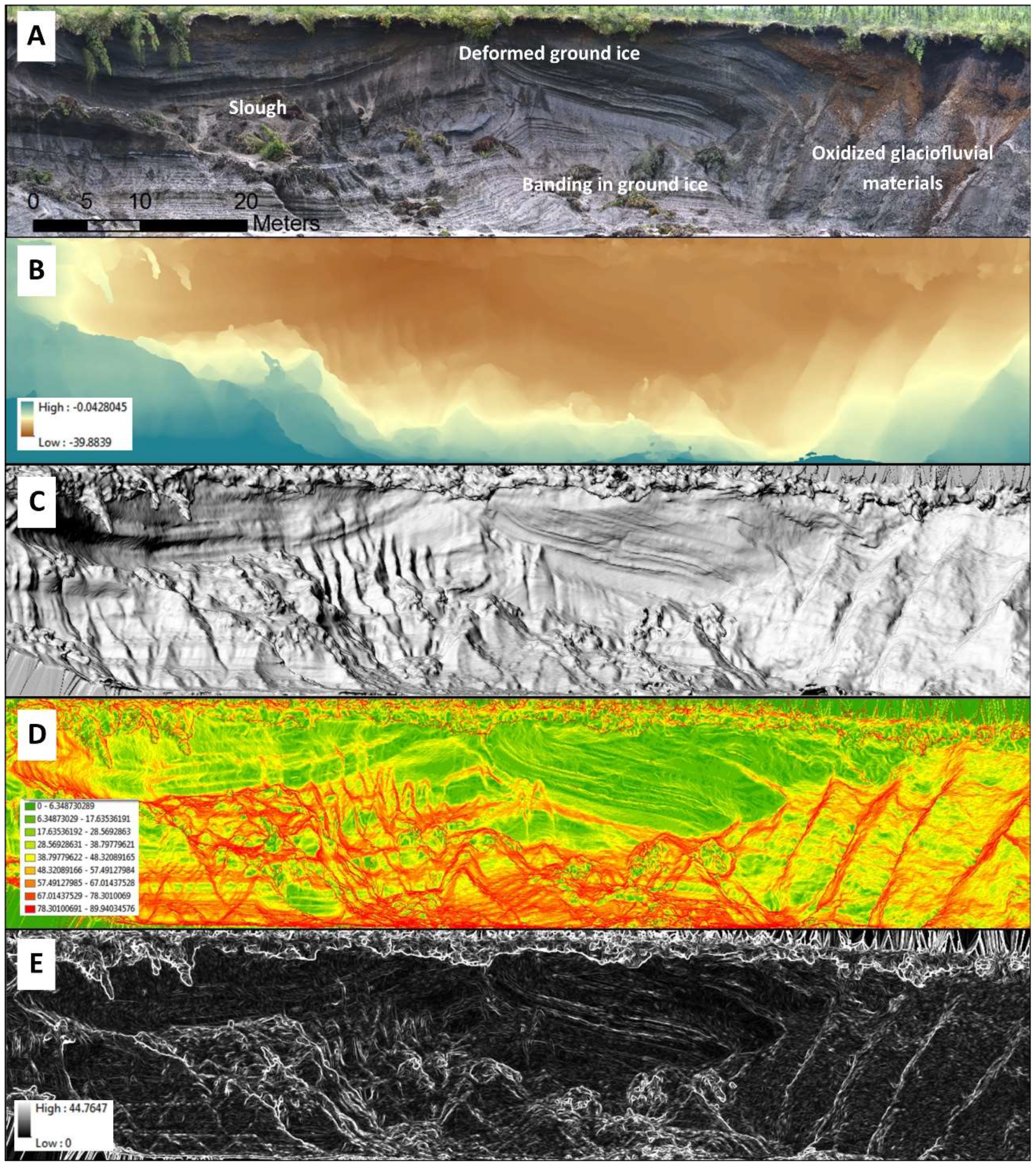
- Image permafrost exposures along slump headwalls and construct high resolution stratigraphic models;
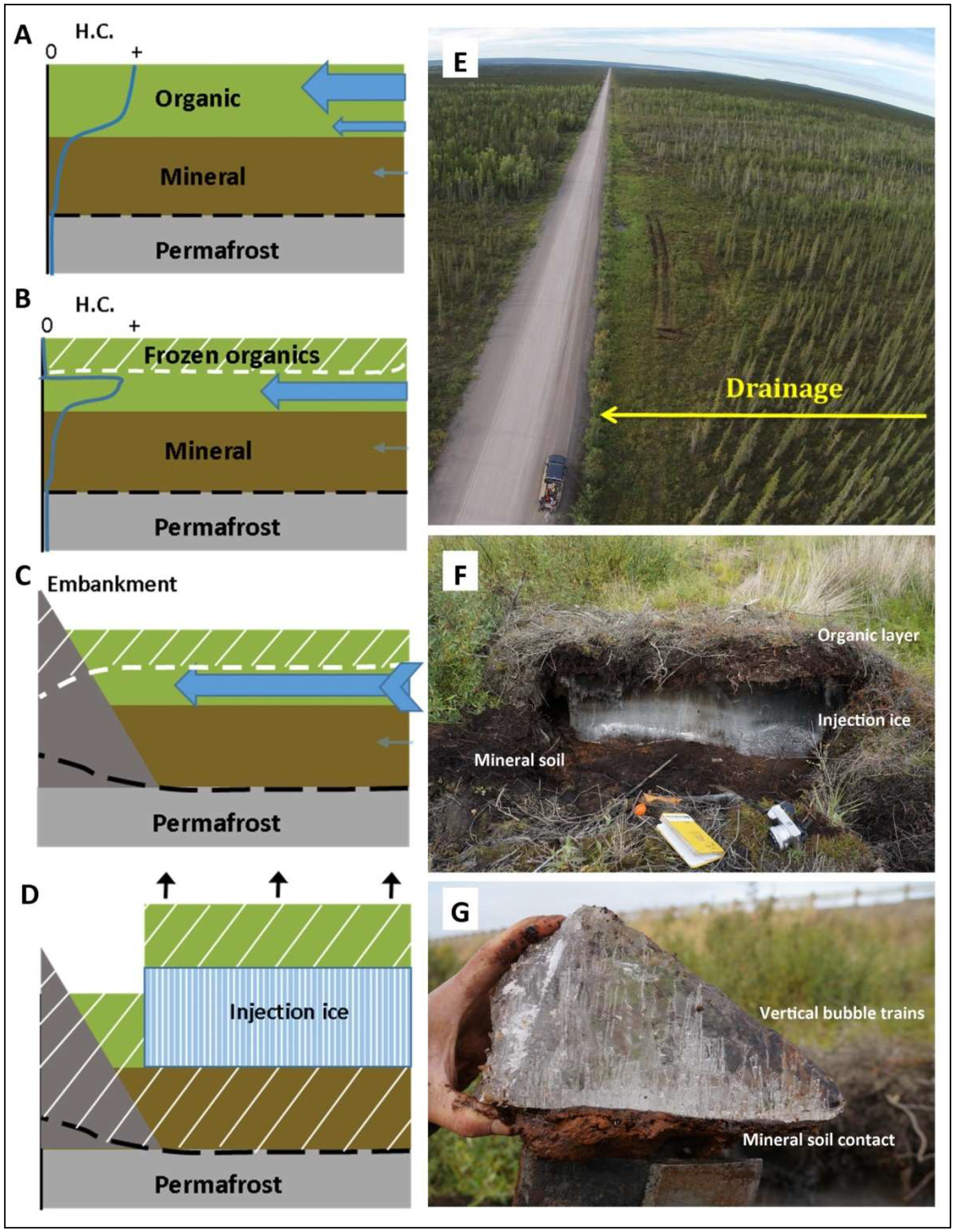
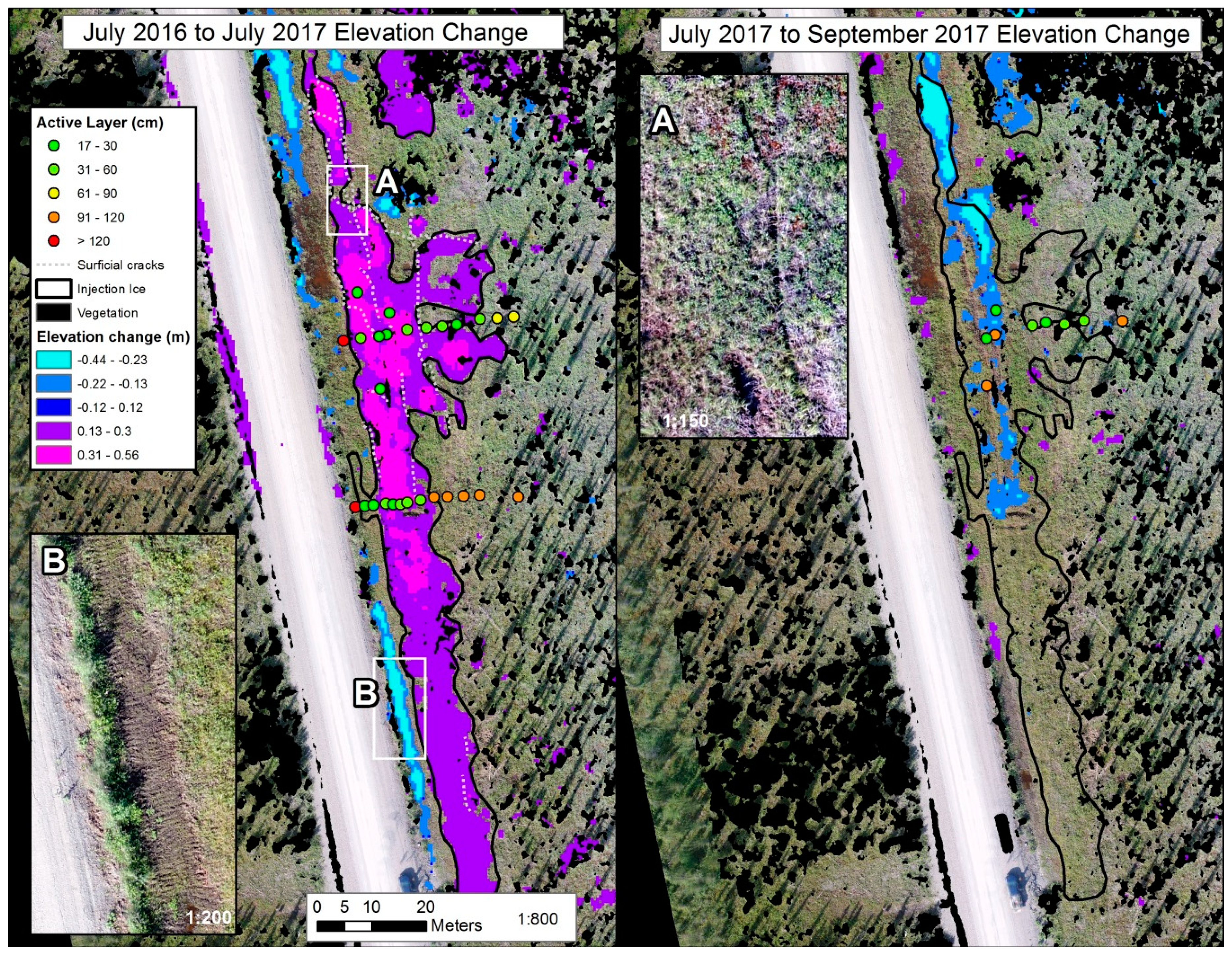
- Monitor uplift and settlement caused by the development and degradation of near-surface injection ice adjacent to roads; and
- Track thaw-related evolution at borrow pits developed in ice-rich permafrost terrain.
2. Materials and Methods
2.1. Study Area
2.2. Data Acquisition
- (A)
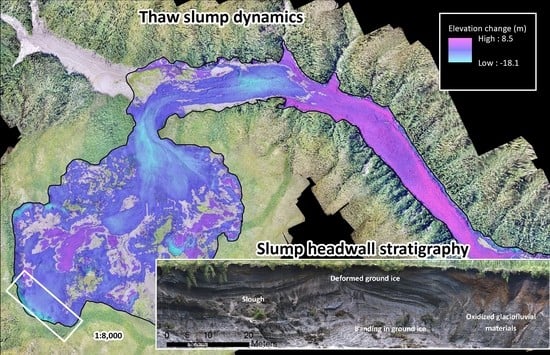
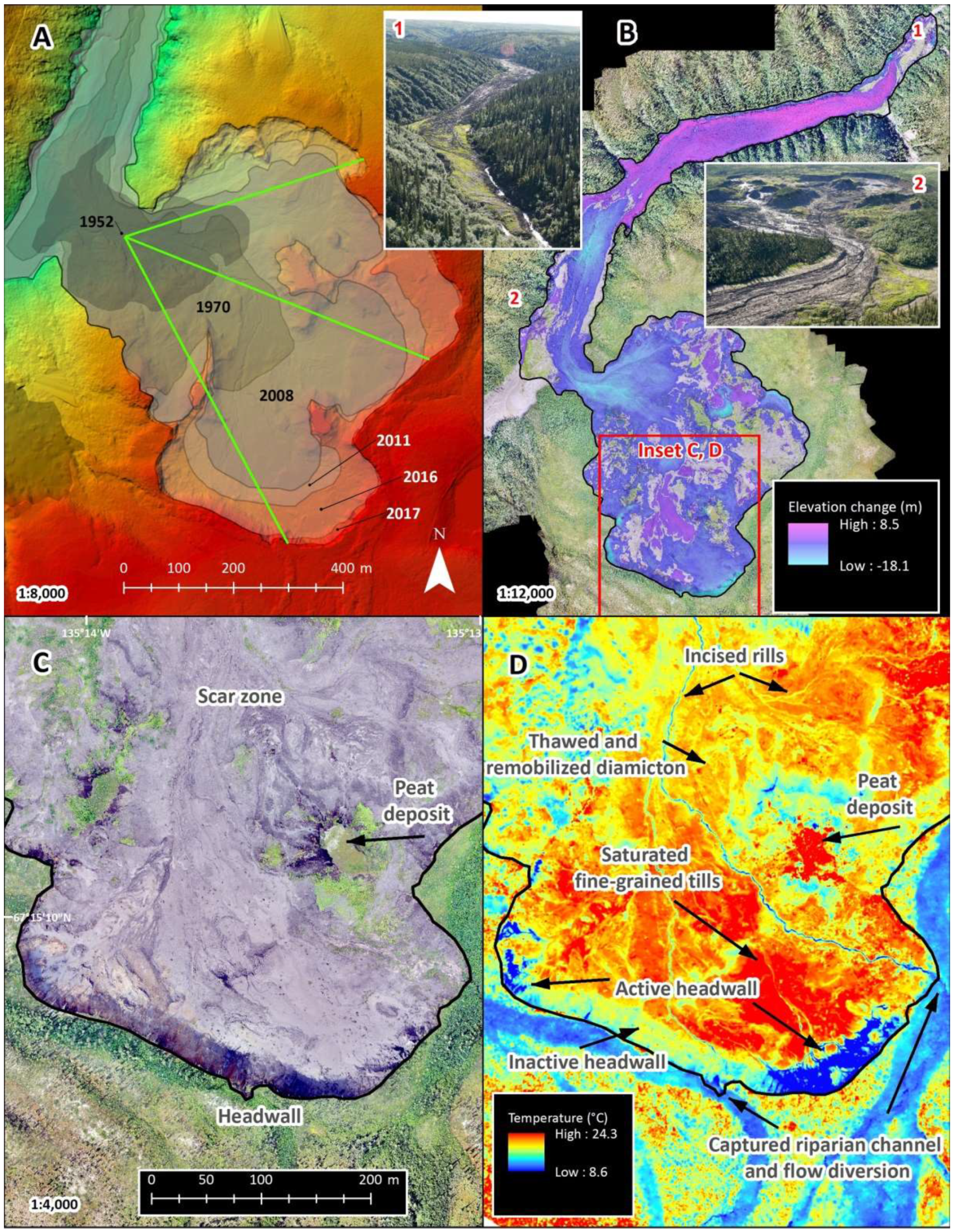
- Description of mega-thaw slumps dynamics at “FM2” [9], involving estimates of volumetric displacement and investigating the processes of thaw-driven sediment transfer;
- (B)
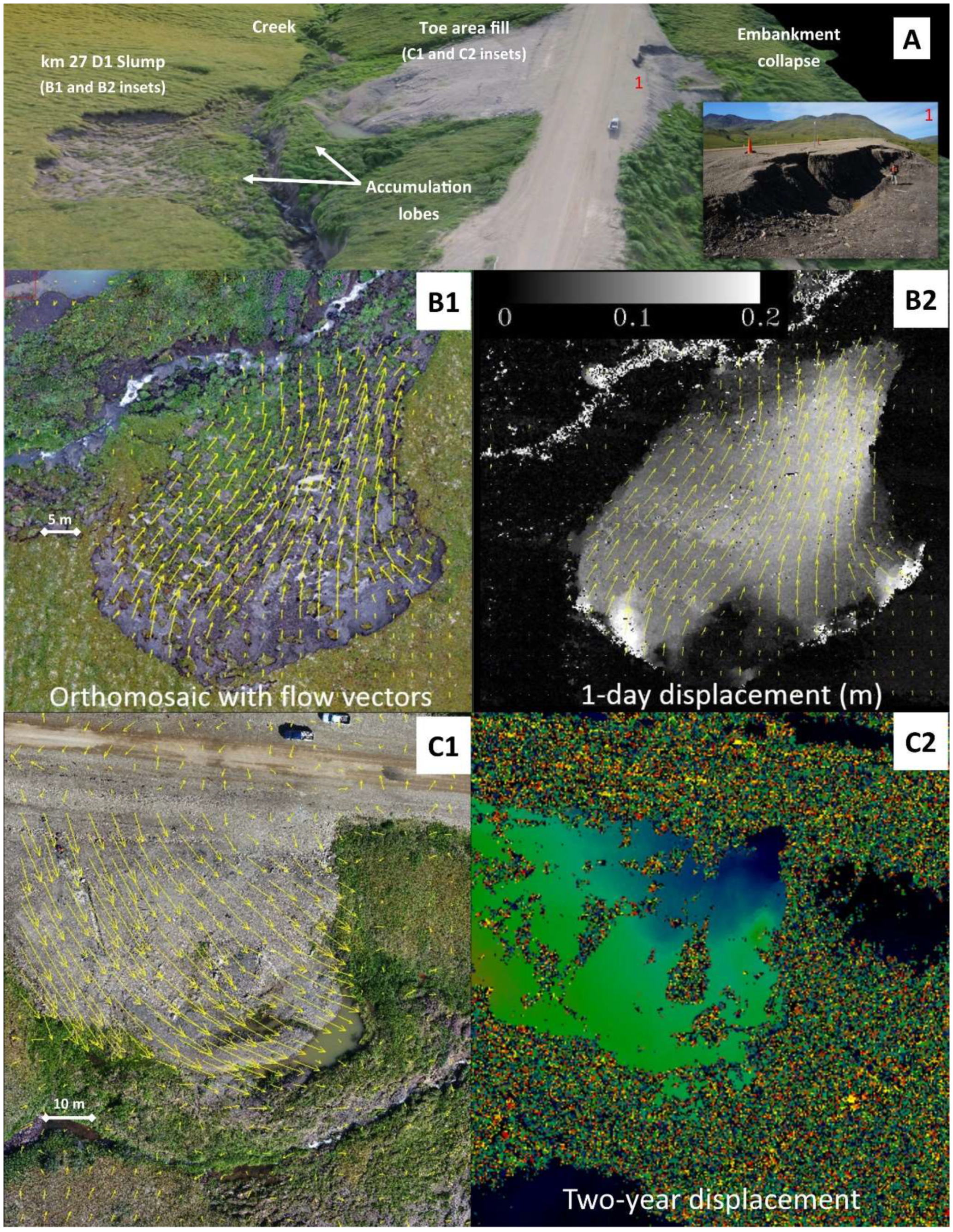
- Quantifying daily and annual flow dynamics associated with slope instability adjacent to the road embankment (site “KM 27 D1”, Dempster Highway).
- (C)
- Describing terrain uplift and settlement in response to injection ice development and degradation adjacent to road embankments (site “KM 213 Caribou Creek”, Dempster Highway).
- (D)
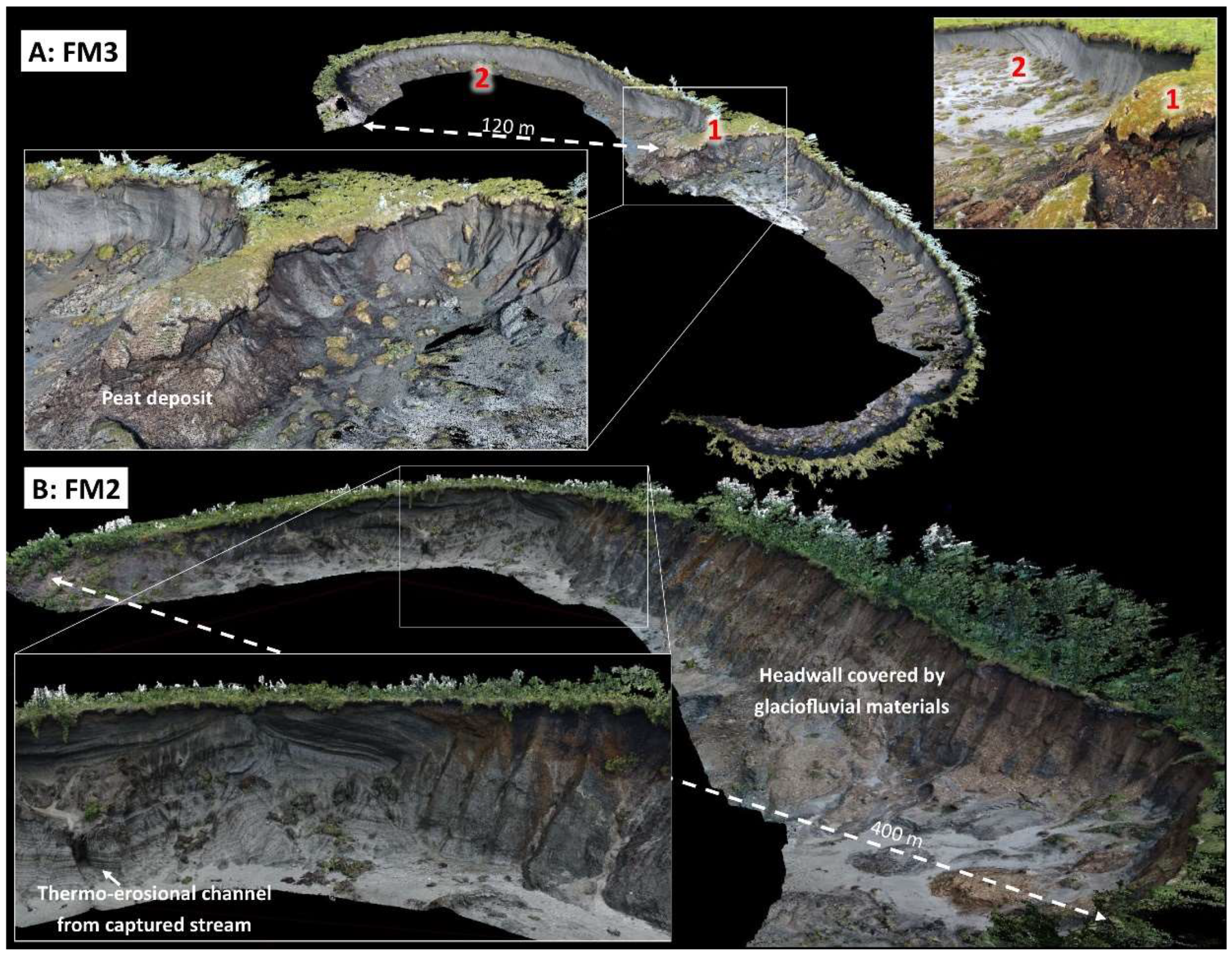
- Development of terrain and stratigraphic models to describe ground-ice conditions and headwall morphometry of large permafrost exposures at slumps “FM2” and “FM3”; and
- (E)
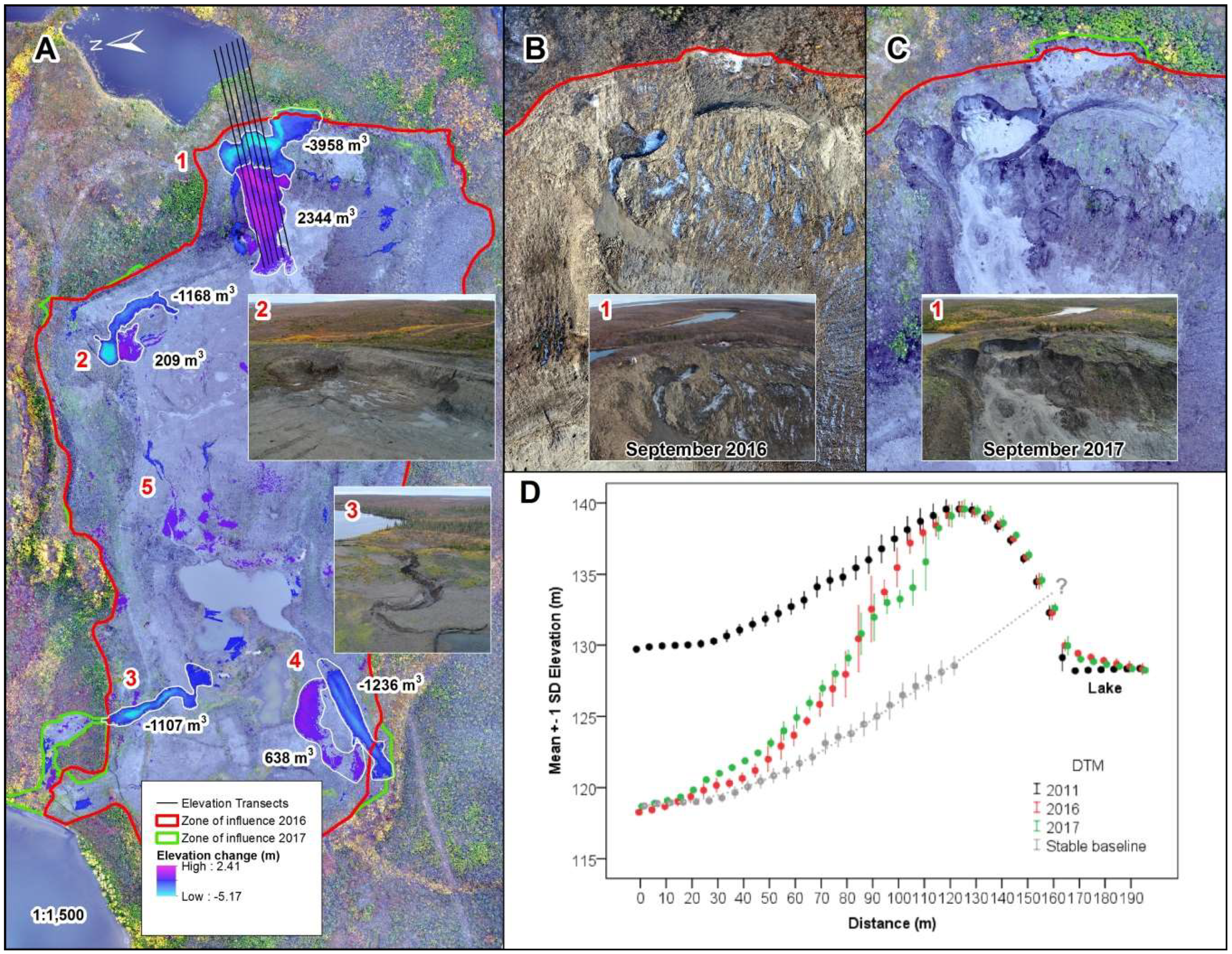
- Differencing UAV-derived digital terrain models to track the thaw-related evolution of anthropogenically disturbed terrain (Site “PW10”, borrow pit).
2.2.1. Unmanned Aerial Vehicle Equipment and Surveys
2.2.2. Global Navigation Satellite System (GNSS) Surveys
2.2.3. Airborne Laser Scanning (ALS)
2.3. Data Processing
2.3.1. GNSS Datasets
2.3.2. UAV Datasets
2.3.3. ALS Dataset and Reconstruction of Disturbed Terrain
2.3.4. Change Detection
2.4. Reference Data
3. Results
3.1. UAV Accuracy Assessments
3.2. Thaw Slump Dynamics
3.2.1. Mega Slumps
3.2.2. Thaw Slumps and Road Infrastructure
3.3. Deriving Digital Stratigraphic Models from Permafrost Headwall Exposures
3.4. Monitoring Injection Ice Development and Degradation Adjacent to Road Embankments
3.5. Terrain Models to Track Thaw Related Evolution of Anthropogenically Disturbed Terrain
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE of CPs (m) | RMSE of CPs (GSD) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Flight ID | Site | Area (ha) | CPs | Elevation Range (m) | Res (m) | X | Y | Z | X | Y | Z |
| 7/10 | FM2/FM3 | 365 | 28 | 240 | 0.033 | 0.042 | 0.036 | 0.130 | 1.3 | 1.1 | 3.9 |
| 18 | PW10 | 56 | 11 | 52 | 0.031 | 0.016 | 0.024 | 0.022 | 0.5 | 0.8 | 0.7 |
| 19 | PW10 | 59 | 4 | 51 | 0.034 | 0.010 | 0.009 | 0.030 | 0.3 | 0.3 | 0.9 |
| 22 | Pit 174 | 50 | 5 | 32 | 0.028 | 0.027 | 0.021 | 0.071 | 1.0 | 0.8 | 2.5 |
| 24 | Husky | 101 | 7 | 103 | 0.034 | 0.014 | 0.038 | 0.083 | 0.4 | 1.1 | 2.4 |
| 26 | I401A | 83 | 12 | 62 | 0.030 | 0.029 | 0.027 | 0.046 | 1.0 | 0.9 | 1.5 |
| 28 | I401A | 80 | 6 | 64 | 0.028 | 0.027 | 0.011 | 0.023 | 1.0 | 0.4 | 0.8 |
| Total | 792 | 73 | |||||||||
| Average | 86 | 0.031 | 0.024 | 0.024 | 0.041 | 0.8 | 0.8 | 1.8 | |||
| Stdev | 71 | 0.003 | 0.011 | 0.011 | 0.027 | 0.4 | 0.3 | 1.2 | |||
References
- Kokelj, S.V.; Jorgenson, M.T. Advances in Thermokarst Research. Permafr. Periglac. Process. 2013, 24, 108–119. [Google Scholar]
- Romanovsky, V.E.; Smith, S.L.; Shiklomanov, N.I.; Streletskiy, D.A.; Isaksen, K.; Kholodov, A.L.; Christiansen, H.H.; Drozdov, D.S.; Malkova, G.V.; Marchenko, S.S. Terrestrial Permafrost [in Arctic Report Card 2017]; 2017. Available online: https://www.arctic.noaa.gov/Report-Card/Report-Card-2017/ArtMID/7798/ArticleID/694/Terrestrial-Permafrost (accessed on 18 October 2018).
- Zwieback, S.; Kokelj, S.V.; Günther, F.; Boike, J.; Grosse, G.; Hajnsek, I. Sub-seasonal thaw slump mass wasting is not consistently energy limited at the landscape scale. Cryosphere 2018, 12, 549–564. [Google Scholar] [CrossRef] [Green Version]
- Brown, S. The Technical opportunities and economic implications of permafrost decay on public infrastructure in the Northwest Territories. In 45th Annual Yellowknife Geoscience Forum; Irwin, D., Gervais, S.D., Terlaky, V., Eds.; Northwest Territories Geological Survey: Yellowknife, NT, Canada, 2017. [Google Scholar]
- AMAP. Snow, Water, Ice and Permafrost in the Arctic (SWIPA): Climate Change and the Cryosphere; Arctic Monitoring and Assessment Programme (AMAP): Oslo, Norway, 2011; p. 538. [Google Scholar]
- Williams, P.J.; Smith, M.W. The Frozen Earth: Fundamentals of Geocryology; Cambridge University Press: Cambridge, UK, 1989. [Google Scholar]
- Fortier, D.; Allard, M.; Shur, Y. Observation of rapid drainage system development by thermal erosion of ice wedges on Bylot Island, Canadian Arctic Archipelago. Permafr. Periglac. Process. 2007, 18, 229–243. [Google Scholar] [CrossRef]
- Quinton, W.L.; Hayashi, M.; Chasmer, L.E. Permafrost-thaw-induced land-cover change in the Canadian subarctic: Implications for water resources. Hydrol. Process. 2011, 25, 152–158. [Google Scholar] [CrossRef]
- Kokelj, S.V.; Tunnicliffe, J.; Lacelle, D.; Lantz, T.C.; Chin, K.S.; Fraser, R. Increased precipitation drives mega slump development and destabilization of ice-rich permafrost terrain, northwestern Canada. Glob. Planet. Chang. 2015, 129, 56–68. [Google Scholar] [CrossRef]
- Vincent, W.F.; Lemay, M.; Allard, M. Arctic permafrost landscapes in transition: Towards an integrated Earth system approach. Arct. Sci. 2017, 3, 39–64. [Google Scholar] [CrossRef]
- Jorgenson, M.T.; Grosse, G. Remote sensing of landscape change in permafrost regions. Permafr. Periglac. Process. 2016, 27, 324–338. [Google Scholar] [CrossRef]
- Fraser, R.H.; Olthof, I.; Kokelj, S.V.; Lantz, T.C.; Lacelle, D.; Brooker, A.; Wolfe, S.; Schwarz, S. Detecting landscape changes in high latitude environments using Landsat trend analysis: 1. visualization. Remote Sens. 2014, 6, 11533–11557. [Google Scholar] [CrossRef]
- Samsonov, S.V.; Lantz, T.C.; Kokelj, S.V.; Zhang, Y. Growth of a young pingo in the Canadian Arctic observed by RADARSAT-2 interferometric satellite radar. Cryosphere 2016, 10, 799–810. [Google Scholar] [CrossRef]
- Jones, B.M.; Grosse, G.; Arp, C.D.; Miller, E.; Liu, L.; Hayes, D.J.; Larsen, C.F. Recent Arctic tundra fire initiates widespread thermokarst development. Sci. Rep. 2015, 5, 15865. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lantz, T.C.; Kokelj, S.V. Increasing rates of retrogressive thaw slump activity in the Mackenzie Delta region, N.W.T., Canada. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef] [Green Version]
- Steedman, A.E.; Lantz, T.C.; Kokelj, S.V. Spatio-temporal variation in high-centre polygons and ice-wedge melt ponds, Tuktoyaktuk Coastlands, Northwest Territories. Permafr. Periglac. Process. 2017, 28, 66–78. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Bhardwaj, A.; Martín-Torres, F.J. LiDAR remote sensing of the cryosphere: Present applications and future prospects. Remote Sens. Environ. 2016, 177, 125–143. [Google Scholar] [CrossRef]
- Brooker, A.; Fraser, R.H.; Olthof, I.; Kokelj, S.V.; Lacelle, D. Mapping the activity and evolution of retrogressive thaw slumps by tasselled cap trend analysis of a Landsat satellite image stack. Permafr. Periglac. Process. 2014, 25, 243–256. [Google Scholar] [CrossRef]
- Carroll, M.; Wooten, M.; DiMiceli, C.; Sohlberg, R.; Kelly, M. Quantifying surface water dynamics at 30 Meter spatial resolution in the North American high northern latitudes 1991–2011. Remote Sens. 2016, 8, 622. [Google Scholar] [CrossRef]
- Fraser, R.; Kokelj, S.; Lantz, T.; McFarlane-Winchester, M.; Olthof, I.; Lacelle, D. Climate sensitivity of high arctic permafrost terrain demonstrated by widespread ice-wedge thermokarst on Banks Island. Remote Sens. 2018, 10, 954. [Google Scholar] [CrossRef]
- Short, N.; Brisco, B.; Couture, N.; Pollard, W.; Murnaghan, K.; Budkewitsch, P. A comparison of TerraSAR-X, RADARSAT-2 and ALOS-PALSAR interferometry for monitoring permafrost environments, case study from Herschel Island, Canada. Remote Sens. Environ. 2011, 115, 3491–3506. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H.; Myshak, S.; Brown, O.; LeClair, A.; Tamminga, A.; Barchyn, T.E.; Moorman, B.; Eaton, B. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 2: Scientific and commercial applications. J. Unmanned Veh. Syst. 2014, 2, 86–102. [Google Scholar] [CrossRef]
- Shahbazi, M.; Théau, J.; Ménard, P. Recent applications of unmanned aerial imagery in natural resource management. GISci. Remote Sens. 2014, 51, 339–365. [Google Scholar] [CrossRef]
- Fraser, R.H.; Olthof, I.; Maloley, M.; Fernandes, R.; Prevost, C.; van der Sluijs, J.; Kokelj, S.; Lantz, T.; Tunnicliffe, J. UAV photogrammetry for mapping and monitoring of northern permafrost landscapes. SPRS Int. Arch. Photo-Grammetry Remote Sens. Spat. Inf. Sci. 2015, 1, 361. [Google Scholar]
- Fraser, R.H.; Olthof, I.; Lantz, T.C.; Schmitt, C. UAV photogrammetry for mapping vegetation in the low-Arctic. Arct. Sci. 2016, 2, 79–102. [Google Scholar] [CrossRef] [Green Version]
- Fraser, R.; van der Sluijs, J.; Hall, R. Calibrating satellite-based indices of burn severity from UAV-derived metrics of a burned boreal forest in NWT, Canada. Remote Sens. 2017, 9, 279. [Google Scholar] [CrossRef]
- Bernard, É.; Friedt, J.M.; Tolle, F.; Marlin, C.; Griselin, M. Using a small COTS UAV to quantify moraine dynamics induced by climate shift in Arctic environments. Int. J. Remote Sens. 2017, 38, 2480–2494. [Google Scholar] [CrossRef]
- Rauhala, A.; Tuomela, A.; Davids, C.; Rossi, P. UAV remote sensing surveillance of a mine tailings impoundment in sub-arctic conditions. Remote Sens. 2017, 9, 1318. [Google Scholar] [CrossRef]
- De Haas, T.; Ventra, D.; Carbonneau, P.E.; Kleinhans, M.G. Debris-flow dominance of alluvial fans masked by runoff reworking and weathering. Geomorphology 2014, 217, 165–181. [Google Scholar] [CrossRef] [Green Version]
- Way, R.G.; Lewkowicz, A.G.; Zhang, Y. Characteristics and fate of isolated permafrost patches in coastal Labrador, Canada. Cryosphere 2018, 12, 2667–2688. [Google Scholar]
- Lousada, M.; Pina, P.; Vieira, G.; Bandeira, L.; Mora, C. Evaluation of the use of very high resolution aerial imagery for accurate ice-wedge polygon mapping (Adventdalen, Svalbard). Sci. Total Environ. 2018, 615, 1574–1583. [Google Scholar] [CrossRef] [PubMed]
- Burn, C.R.; Kokelj, S.V. The environment and permafrost of the Mackenzie Delta area. Permafr. Periglac. Process. 2009, 20, 83–105. [Google Scholar] [CrossRef]
- Kokelj, S.V.; Palmer, M.J.; Lantz, T.C.; Burn, C.R. Ground Temperatures and Permafrost Warming from Forest to Tundra, Tuktoyaktuk Coastlands and Anderson Plain, NWT, Canada. Permafr. Periglac. Process. 2017, 28, 543–551. [Google Scholar] [CrossRef]
- Lantz, T.C.; Gergel, S.E.; Kokelj, S.V. Spatial heterogeneity in the shrub tundra ecotone in the Mackenzie Delta region, Northwest Territories: Implications for Arctic environmental change. Ecosystems 2010, 13, 194–204. [Google Scholar] [CrossRef]
- O’Neill, H.B.; Burn, C.R.; Kokelj, S.V.; Lantz, T.C. ‘Warm’ tundra: Atmospheric and near-surface ground temperature inversions across an alpine treeline in continuous permafrost, western Arctic, Canada. Permafr. Periglac. Process. 2015, 26, 103–118. [Google Scholar] [CrossRef]
- Mackay, J.R. The world of underground ice. Ann. Assoc. Am. Geogr. 1972, 62, 1–22. [Google Scholar]
- MacKay, J. Thermally induced movements in ice-wedge polygons, western arctic coast: A long-term study. Géogr. Phys. Quat. 2000, 54, 41–68. [Google Scholar] [CrossRef]
- Kokelj, S.V.; Lantz, T.C.; Wolfe, S.A.; Kanigan, J.C.; Morse, P.D.; Coutts, R.; Molina-Giraldo, N.; Burn, C.R. Distribution and activity of ice wedges across the forest-tundra transition, western Arctic Canada. J. Geophys. Res. Earth Surf. 2014, 119, 2032–2047. [Google Scholar] [Green Version]
- Mackay, J.R. Pingo growth and collapse, Tuktoyaktuk Peninsula area, western Arctic Coast, Canada: A long-term field study. Géogr. Phys. Quat. 1998, 52, 271–323. [Google Scholar] [CrossRef]
- Kokelj, S.V.; Lantz, T.C.; Tunnicliffe, J.; Segal, R.; Lacelle, D. Climate-driven thaw of permafrost preserved glacial landscapes, northwestern Canada. Geology 2017, 45, 371–374. [Google Scholar] [CrossRef] [Green Version]
- Kokelj, S.V.; Burn, C.R.; Tarnocai, C. The structure and dynamics of earth hummocks in the Subarctic forest near Inuvik, Northwest Territories, Canada. Arct. Antarct. Alp. Res. 2007, 39, 99–109. [Google Scholar]
- Rampton, V.N. Quaternary Geology of the Tuktoyaktuk Coastlands, Northwest Territories; Memoir 423; Geological Survey of Canada: Ottawa, ON, Canada, 1988; p. 98. [Google Scholar]
- Marsh, P.; Woo, M.-K. Snowmelt, glacier melt, and high arctic streamflow regimes. Can. J. Earth Sci. 1981, 18, 1380–1384. [Google Scholar] [CrossRef]
- Mackay, J.R. Disturbances to the tundra and forest tundra environment of the western Arctic. Can. Geotech. J. 1970, 7, 420–432. [Google Scholar] [CrossRef]
- Kokelj, S.V.; Riseborough, D.; Coutts, R.; Kanigan, J.C.N. Permafrost and terrain conditions at northern drilling-mud sumps: Impacts of vegetation and climate change and the management implications. Cold Reg. Sci. Technol. 2010, 64, 46–56. [Google Scholar] [CrossRef]
- Gill, H.K.; Lantz, T.C.; O’Neill, B.; Kokelj, S.V. Cumulative impacts and feedbacks of a gravel road on shrub tundra ecosystems in the Peel Plateau, Northwest Territories, Canada. Arct. Antarct. Alp. Res. 2014, 46, 947–961. [Google Scholar] [CrossRef]
- Mosbrucker, A.R.; Major, J.J.; Spicer, K.R.; Pitlick, J. Camera system considerations for geomorphic applications of SfM photogrammetry. Earth Surf. Process. Landf. 2016, 42, 969–986. [Google Scholar] [CrossRef]
- Wiseman, D.J.; van der Sluijs, J. Alternative methods for developing and assessing the accuracy of UAV-Derived DEMs. Int. J. Appl. Geospat. Res. 2015, 6, 58–77. [Google Scholar] [CrossRef]
- Hugenholtz, C.; Brown, O.; Walker, J.; Barchyn, T.; Nesbit, P.; Kucharczyk, M.; Myshak, S. Spatial accuracy of UAV-derived orthoimagery and topography: Comparing photogrammetric models processed with direct geo-referencing and ground control points. Geomatica 2016, 70, 21–30. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Sensefly LCC. ThermoMAP Camera User Manual; SenseFly SA: Cheseaux-Lausanne, Switzerland, 2017. [Google Scholar]
- Kraaijenbrink, P.D.A.; Shea, J.M.; Litt, M.; Steiner, J.F.; Treichler, D.; Koch, I.; Immerzeel, W.W. Mapping surface temperatures on a debris-covered glacier with an unmanned aerial vehicle. Front. Earth Sci. 2018, 6, 64. [Google Scholar] [CrossRef]
- Tonkin, T.; Midgley, N. Ground-control networks for image based surface reconstruction: An investigation of optimum survey designs using UAV derived imagery and structure-from-motion photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. Earth Environ. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Isenburg, M. LASzip: Lossless compression of LiDAR data. Photogramm. Eng. Remote Sens. 2013, 79, 209–217. [Google Scholar] [CrossRef]
- Ribeiro-Gomes, K.; Hernández-López, D.; Ortega, F.J.; Ballesteros, R.; Poblete, T.; Moreno, A.M. Uncooled thermal camera calibration and optimization of the photogrammetry process for UAV applications in agriculture. Sensors 2017, 17, 2173. [Google Scholar] [CrossRef] [PubMed]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. In International Archives of Photogrammetry and Remote Sensing; GITC bv: Lemmer, The Netherlands, 2000; Volume 33(B4/1), pp. 110–117. [Google Scholar]
- Wiseman, D.; Running, G.; Freeman, A. A Paleoenvironmental reconstruction of Elkwater Lake, Alberta. Géogr. Phys. Quat. 2002, 56, 279–290. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Whitehead, K.; Brown, O.W.; Barchyn, T.E.; Moorman, B.J.; LeClair, A.; Riddell, K.; Hamilton, T. Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model. Geomorphology 2013, 194, 16–24. [Google Scholar] [CrossRef] [Green Version]
- Leprince, S.; Barbot, S.; Ayoub, F.; Avouac, J.P. Automatic and precise ortho-rectification, coregistration, and subpixel correlation of satellite images, application to ground deformation measurements. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1529–1558. [Google Scholar] [CrossRef]
- Lucieer, A.; de Jong, S.M.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; de Jong, M.S. Time series analysis of landslide dynamics using an unmanned aerial vehicle (UAV). Remote Sens. 2015, 7, 1737–1757. [Google Scholar] [CrossRef]
- Swanson, D.; Nolan, M. Growth of retrogressive thaw slumps in the Noatak Valley, Alaska, 2010–2016, measured by airborne photogrammetry. Remote Sens. 2018, 10, 983. [Google Scholar] [CrossRef]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing accuracy and repeatability of UAV blocks oriented with GNSS-supported aerial triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; Cella, U.M.D.; Roncella, R.; Santise, M. Quality assessment of DSMs produced from UAV flights georeferenced with on-board RTK positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]
- Lantuit, H.; Pollard, W.H. Temporal stereophotogrammetric analysis of retrogressive thaw slumps on Herschel Island, Yukon Territory. Nat. Hazards Earth Syst.Sci. 2005, 5, 413–423. [Google Scholar] [CrossRef] [Green Version]
- Kokelj, S.V.; Jenkins, R.E.; Milburn, D.; Burn, C.R.; Snow, N. The influence of thermokarst disturbance on the water quality of small upland lakes, Mackenzie Delta region, Northwest Territories, Canada. Permafr. Periglac. Process. 2005, 16, 343–353. [Google Scholar] [CrossRef]
- Kokelj, S.V.; Lacelle, D.; Lantz, T.C.; Tunnicliffe, J.; Malone, L.; Clark, I.D.; Chin, K.S. Thawing of massive ground ice in mega slumps drives increases in stream sediment and solute flux across a range of watershed scales. J. Geophys. Res. Earth Surf. 2013, 118, 681–692. [Google Scholar] [CrossRef] [Green Version]
- Littlefair, C.A.; Tank, S.E.; Kokelj, S.V. Retrogressive thaw slumps temper dissolved organic carbon delivery to streams of the Peel Plateau, NWT, Canada. Biogeosciences 2017, 14, 5487–5505. [Google Scholar] [CrossRef] [Green Version]
- Rudy, A.C.A.; Lamoureux, S.F.; Kokelj, S.V.; Smith, I.R.; England, J.H. Accelerating thermokarst transforms ice-cored terrain triggering a downstream cascade to the ocean. Geophys. Res. Lett. 2017, 44, 11080–11087. [Google Scholar] [CrossRef]
- Malone, L.; Lacelle, D.; Kokelj, S.; Clark, I.D. Impacts of hillslope thaw slumps on the geochemistry of permafrost catchments (Stony Creek watershed, NWT, Canada). Chem. Geol. 2013, 356, 38–49. [Google Scholar] [CrossRef]
- Lacelle, D.; Brooker, A.; Fraser, R.H.; Kokelj, S.V. Distribution and growth of thaw slumps in the Richardson Mountains–Peel Plateau region, northwestern Canada. Geomorphology 2015, 235, 40–51. [Google Scholar] [CrossRef]
- Armstrong, L.; Lacelle, D.; Fraser, R.H.; Kokelj, S.; Knudby, A. Thaw slump activity measured using stationary cameras in time-lapse and Structure-from-Motion photogrammetry. Arct. Sci. 2018. [Google Scholar] [CrossRef]
- French, H.; Shur, Y. The principles of cryostratigraphy. Earth-Sci. Rev. 2010, 101, 190–206. [Google Scholar] [CrossRef]
- Murton, J.B.; Edwards, M.E.; Lozhkin, A.V.; Anderson, P.M.; Savvinov, G.N.; Bakulina, N.; Bondarenko, O.V.; Cherepanova, M.V.; Danilov, P.P.; Boeskorov, V.; et al. Preliminary paleoenvironmental analysis of permafrost deposits at Batagaika megaslump, Yana Uplands, northeast Siberia. Quat. Res. 2017, 87, 314–330. [Google Scholar] [CrossRef] [Green Version]
- Lacelle, D.; Fontaine, M.; Forest, A.P.; Kokelj, S. High-resolution stable water isotopes as tracers of thaw unconformities in permafrost: A case study from western Arctic Canada. Chem. Geol. 2014, 368, 85–96. [Google Scholar] [CrossRef]
- Lewkowicz, A.G. Headwall retreat of ground-ice slumps, Banks Island, Northwest Territories. Can. J. Earth Sci. 1987, 24, 1077–1085. [Google Scholar] [CrossRef]
- Grohmann, C.H.; Smith, M.J.; Riccomini, C. Multiscale analysis of topographic surface roughness in the Midland Valley, Scotland. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1200–1213. [Google Scholar] [CrossRef]
- Pollard, W.H.; French, H.M. The groundwater hydraulics of seasonal frost mounds, North Fork Pass, Yukon Territory. Can. J. Earth Sci. 1984, 21, 1073–1081. [Google Scholar] [CrossRef]
- Morse, P.D.; Wolfe, S.A. Geological and meteorological controls on icing (aufeis) dynamics (1985 to 2014) in subarctic Canada. J. Geophys. Res. Earth Surf. 2015, 120, 1670–1686. [Google Scholar] [CrossRef]
- Morse, P.D.; Burn, C.R. Perennial frost blisters of the outer Mackenzie Delta, western Arctic coast, Canada. Earth Surf. Process. Landf. 2014, 39, 200–213. [Google Scholar] [CrossRef]
- Environmental Impact Review Board. Final Report of the Panel for the Substituted Environmental Impact Review of the Hamlet of Tuktoyaktuk, Town of Inuvik and GNWT-Proposal to Construct the Inuvik to Tuktoyaktuk Highway. 2013. Available online: https://www.ceaa.gc.ca/050/documents/p58081/85369E.pdf (accessed on 15 October 2018).
- Segal, R.A.; Lantz, T.C.; Kokelj, S.V. Acceleration of thaw slump activity in glaciated landscapes of the Western Canadian Arctic. Environ. Res. Lett. 2016, 11, 034025. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S.; Olerka, H.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Tuominen, S.; Balazs, A.; Honkavaara, E.; Pölönen, I.; Saari, H.; Hakala, T.; Viljanen, N. Hyperspectral UAV-imagery and photogrammetric canopy height model in estimating forest stand variables. Silva Fenn. 2017, 51, 7721. [Google Scholar] [CrossRef]
- Webster, C.; Westoby, M.; Rutter, N.; Jonas, T. Three-dimensional thermal characterization of forest canopies using UAV photogrammetry. Remote Sens. Environ. 2018, 209, 835–847. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef]
- Chu, T.; Lindenschmidt, K.-E. Comparison and validation of digital elevation models derived from InSAR for a flat inland delta in the high latitudes of Northern Canada. Can. J. Remote Sens. 2017, 43, 109–123. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on structure-from-motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 1: A review of progress and challenges. J. Unmanned Veh. Syst. 2014, 2, 69–85. [Google Scholar] [CrossRef]
- Salamí, E.; Barrado, C.; Pastor, E. UAV flight experiments applied to the remote sensing of vegetated areas. Remote Sens. 2014, 6, 11051–11081. [Google Scholar] [CrossRef] [Green Version]
- Percivall, G.S.; Reichardt, M.; Taylor, T. Common approach to geoprocessing of UAV data across application domains. Int. Arch. Photogramm. Remote Sensi. Spat. Inf. Sci. 2015, 40, 275–279. [Google Scholar]
- Sun, H.; Shimada, M.; Xu, F. Recent advances in synthetic aperture radar remote sensing-systems, data processing, and applications. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2013–2016. [Google Scholar] [CrossRef]
- National Aeronautics and Space Administration. A Concise Experiment Plan for the Arctic-Boreal Vulnerability Experiment; NASA: Washington, DC, USA, 2014.
- Gajewski, K. Quantitative reconstruction of Holocene temperatures across the Canadian Arctic and Greenland. Glob. Planet. Chang. 2015, 128, 14–23. [Google Scholar] [CrossRef]







| Year | Platform | Sensor | ||||
|---|---|---|---|---|---|---|
| Model * | Make | Flight Planning & Control Station | Camera & Lens | Size | MP | |
| 2015 | Spyder PX8 Plus | Bradatech | Mission Planner v1.3 | Sony a6000 & f/2.8 Sony 20 mm pancake | APS-C | 24 |
| 2016 | RX4-S Surveyor | Bradatech | Mission Planner v1.3 | Sony RX100 III & f/1.8 Zeiss 24 mm | 1 in | 20 |
| Inspire 1 Pro | DJI | Litchi for DJI app | Zenmuse X5 (FC550) & f/1.7 MFT 15 mm | Micro 4/3 | 16 | |
| 2017 | eBee Plus RTK/PPK | Sensefly | eMotion 3 | Sensefly S.O.D.A & f/2.8 Sensefly 28 mm Sensefly ThermoMAP thermal camera | 1 in n/a | 20 0.3 |
| Phantom 4 Pro | DJI | DJI GS Pro app | DJI FC6310 & f/2.8 DJI 24 mm | 1 in | 20 | |
| ID | Site | Date | UAV | Flights | AGL (m) | Res (cm) | Area (ha) | Photos (no.) | Overlap forward/Side (%) | GCPs/CPs | Notes |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | D1 | 28 July 2015 | PX8 | 1 | 70 | 1.5 | 4.3 | 295 | 90/83 | 4/0 | |
| 2 | D1 | 29 July 2015 | PX8 | 1 | 70 | 1.5 | 3.8 | 291 | 90/83 | 4/0 | |
| 3 | D1 | 3 August 2016 | Inspire | 1 | 55 | 1.3 | 1.7 | 79 | 83/75 | 4/0 | |
| 4 | D1 | 27 July 2017 | P4P | 1 | 40 | 1.2 | 6.3 | 316 | 90/85 | 5/10 | |
| 5 | FM3 | 29 July 2015 | PX8 | 2 | 90 | 1.9 | 28.3 | 658 | 83/75 | 4/0 | |
| 6 | FM3 | 2 August 2016 | Inspire | 3 | 90 | 2.4 | 34.3 | 583 | 83/75 | 8/49 * | |
| 7 | FM3 | 26/28 July 2017 | eBee | 5 | 120 | 3.3 | 365.0 | 3499 | 80/80 | 6/22 | |
| 8 | FM3 | 28 July 2017 | P4P | 1 | 6 + 15 | 0.4 | 0.35 | 208 | Every 2 s | - | Headwall |
| 9 | FM2 | 2 August 2016 | Inspire | 8 | 90 | 2.4 | 83.6 | 1516 | 83/75 | 17/0 | |
| 10 | FM2 | 26/28 July 2017 | eBee | 5 | 120 | 3.3 | 365.0 | 3499 | 80/80 | 6/22 | Part of ID:7 |
| 11 | FM2 | 26 July 2017 | eBee | 1 | 120 | 28.5 | 92.0 | 1894 | 90/75 | 0/0 | Thermal |
| 12 | FM2 | 26 July 2017 | P4P | 1 | 20 + 30 | 1.25 | 1.0 | 113 | Every 2 | - | Headwall |
| 13 | KM213 | 7 August 2016 | RX4 | 1 | 40 | 1.0 | 2.0 | 85 | 85/70 | 4/0 | |
| 14 | KM213 | 29 July 2017 | P4P | 1 | 50 | 1.3 | 4.5 | 459 | 90/85 | 7/57 * | |
| 15 | KM213 | 5 September 2017 | P4P | 1 | 50 | 1.3 | 4.5 | 489 | 90/85 | 7/25 * | |
| 16 | PW10 | 9 August 2016 | RX4S | 1 | 90 | 2.6 | 10.4 | 194 | 93/80 | 5/0 | |
| 17 | PW10 | 28 September 2016 | RX4S | 2 | 90 | 2.8 | 32.6 | 488 | 90/65 | 5/0 | |
| 18 | PW10 | 13 June 2017 | eBee | 1 | 120 | 3.1 | 55.5 | 511 | 80/80 | 4/7 | |
| 19 | PW10 | 10 September 2017 | eBee | 1 | 120 | 3.4 | 58.6 | 580 | 80/80 | 4/0 | |
| 20 | Pit 174 | 9 August 2016 | RX4S | 2 | 90 | 2.6 | 34.6 | 663 | 93/65 | 4/0 | |
| 21 | Pit 174 | 28 September 2016 | RX4S | 2 | 90 | 2.5 | 37.8 | 541 | 90/65 | 5/0 | |
| 22 | Pit 174 | 10 September 2017 | eBee | 1 | 98 | 2.8 | 50.0 | 467 | 80/70 | 5/0 | |
| 23 | Husky | 3 August 2016 | Inspire | 2 | 75 | 1.7 | 36.8 | 773 | 83/75 | 4/0 | |
| 24 | Husky | 28 July 2017 | eBee | 1 | 119 | 3.4 | 100.5 | 723 | 80/70 | 3/4 | |
| 25 | Husky | 28 July 2017 | eBee | 1 | 120 | 29.0 | 110.8 | 2124 | 90/75 | 0/0 | Thermal |
| 26 | I401A | 10 June 2017 | eBee | 1 | 119 | 3.0 | 82.8 | 675 | 80/75 | 4/8 | |
| 27 | I401A | 10 June 2017 | eBee | 1 | 117 | 26.5 | 93.1 | 844 | 80/75 | 0/0 | Thermal |
| 28 | I401A | 30 July 2017 | eBee | 1 | 119 | 2.8 | 79.5 | 682 | 80/75 | 4/2 | |
| 29 | CRB | 28 July 2015 | PX8 | 2 | 70 | 1.5 | 12.1 | 711 | 83/75 | 4/0 | |
| Total | 47 | 1427 | 20,461 | 121/184 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van der Sluijs, J.; Kokelj, S.V.; Fraser, R.H.; Tunnicliffe, J.; Lacelle, D. Permafrost Terrain Dynamics and Infrastructure Impacts Revealed by UAV Photogrammetry and Thermal Imaging. Remote Sens. 2018, 10, 1734. https://doi.org/10.3390/rs10111734
Van der Sluijs J, Kokelj SV, Fraser RH, Tunnicliffe J, Lacelle D. Permafrost Terrain Dynamics and Infrastructure Impacts Revealed by UAV Photogrammetry and Thermal Imaging. Remote Sensing. 2018; 10(11):1734. https://doi.org/10.3390/rs10111734
Chicago/Turabian StyleVan der Sluijs, Jurjen, Steven V. Kokelj, Robert H. Fraser, Jon Tunnicliffe, and Denis Lacelle. 2018. "Permafrost Terrain Dynamics and Infrastructure Impacts Revealed by UAV Photogrammetry and Thermal Imaging" Remote Sensing 10, no. 11: 1734. https://doi.org/10.3390/rs10111734
APA StyleVan der Sluijs, J., Kokelj, S. V., Fraser, R. H., Tunnicliffe, J., & Lacelle, D. (2018). Permafrost Terrain Dynamics and Infrastructure Impacts Revealed by UAV Photogrammetry and Thermal Imaging. Remote Sensing, 10(11), 1734. https://doi.org/10.3390/rs10111734